В. Процедура рационального расположения
advertisement

ISSN 2072-9502. Âåñòíèê ÀÃÒÓ. Ñåð.: Óïðàâëåíèå, âû÷èñëèòåëüíàÿ òåõíèêà è èíôîðìàòèêà. 2012. № 2
ÊÎÌÏÜÞÒÅÐÍÎÅ ÎÁÅÑÏÅ×ÅÍÈÅ
È ÂÛ×ÈÑËÈÒÅËÜÍÀß ÒÅÕÍÈÊÀ
УДК 004.7.056:621.397.42.001.63
ББК 32.973.2-02:32.94-5
С. В. Лукоянов, С. В. Белов
ÏÐÎÖÅÄÓÐÀ ÐÀÖÈÎÍÀËÜÍÎÃÎ ÐÀÑÏÎËÎÆÅÍÈß
ÊÀÌÅÐ ÂÈÄÅÎÍÀÁËÞÄÅÍÈß
 ÑÎÑÒÀÂÅ ÑÈÑÒÅÌÛ ÊÎÍÒÐÎËß È ÓÏÐÀÂËÅÍÈß ÄÎÑÒÓÏÎÌ
S. V. Lukoyanov, S. V. Belov
THE METHOD OF THE RATIONAL LOCATION
OF CAMERAS OF VIDEO OBSERVATION
IN THE SYSTEM OF CONTROL AND MANAGEMENT OF THE ACCESS
Рассматривается проблема выбора мест установки камеры, существующий опыт, выраженный в государственных стандартах РФ и рекомендациях МВД РФ. Описан алгоритм автоматизированного проектирования системы видеонаблюдения. Указаны ключевые шаги алгоритма,
входные и выходные параметры основных процедур и функций.
Ключевые слова: алгоритм автоматизированного проектирования, система физической
защиты, охранное видеонаблюдение, проектирование, требование к подсистемам автоматизированного проектирования систем наблюдения.
The problem of placing the camera and the existing experience expressed in state standards of Russian Federation and in recommendations of the Russian Interior Ministry of Russian Federation, are
considered. The algorithm of automated engineering of video observation system is described. The key
steps of the algorithm, the input and output parameters of the basic procedures and functions are stated.
Key words: algorithm of automated engineering, system of physical protection, security video
observation, engineering, requirement for subsystems of automated engineering of video observation
system.
При проектировании системы видеонаблюдения объекта защиты необходимо выполнять
множество прикладных расчетов, требующих знаний и времени. При проектировании объектов
высокой сложности особенно трудно определить оптимальное расположение камер и взаимодействие их технических возможностей. В настоящее время на рынке существует множество
калькуляторов расчетов установки камер, однако они не решают проблему выбора мест их установки и не учитывают существующий опыт, выраженный в рекомендациях Министерства
внутренних дел РФ. Для создания надежной системы охраны необходимо учитывать такие характеристики, как вероятность обнаружения объекта в поле зрения камер, особенности работы
камеры в ночном режиме, возможность определять точное значение затенения объектов и многие другие важные нюансы проектирования качественной системы наблюдения. Таким образом,
при создании проекта видеонаблюдения все трудности ложатся на плечи человека, который может быть недостаточно квалифицированным специалистом и может допускать серьезные ошибки. Именно поэтому остается актуальной разработка системы, способной самостоятельно, без
участия человека или с минимальным его участием, с учетом огромного множества факторов
и требований к установке камер, различного рода рекомендаций, основанных на опыте большого числа экспертов, утвержденных в регламентах Министерства внутренних дел РФ, размещать
на объекте защиты камеры видеонаблюдения [1].
В данной работе описан алгоритм автоматизированного проектирования системы видеонаблюдения, входными параметрами которого являются:
1. План объекта защиты (территория, здание или помещение), представленный в цифровом виде.
2. База данных (БД) имеющихся камер с их характеристиками.
3. Множество объектов и координаты узловых точек объектов.
4. Зоны, в которых необходимо наблюдать множество объектов, представленное в виде
многоугольника с координатами узловых точек.
82
Êîìïüþòåðíîå îáåñïå÷åíèå è âû÷èñëèòåëüíàÿ òåõíèêà
Основные этапы работы алгоритма
1. Анализ загруженного плана – распознавание перегородок и точек возможного прохода (двери, окна, лестничные пролеты, ворота).
2. Наложение декартовой системы координат на план объекта защиты с расположением начала координат в левый нижний угол.
3. Размещение объектов интерьера, ценностей, дополнительных перегородок и точек
проникновения с использованием процедуры размещения объектов на плане.
В процедуре имеется перечень объектов с заданными физическими свойствами: габариты, прозрачность, базовая ценность (как базовый параметр, т. е. цена самого сейфа, а не информации в нем). На усмотрение эксперта заполняются дополнительные поля, такие как дополнительная ценность (ценность информации в сейфе, компьютера и т. д., т. е. цена риска), допустимый процент закрытия (ДПЗ) объекта. Возможно создание уникальных или специфических объектов. Для каждого объекта задаются: габариты объекта (координаты узловых точек многоугольника, высота объекта), прозрачность, общая ценность, ДПЗ. Если требуется идентифицировать человека, то можно указать предполагаемую зону, в которой будет находиться объект
(например, пространство перед дверью или часть лестничного пролета).
4. Выделение зон наблюдения, в которых требуется выполнить задачу, поставленную
перед проектировщиком, а именно:
– проектировщик отмечает узлы зоны наблюдения;
– ставит задачу, которая должна быть выполнена в зоне;
– оценивает вероятность обнаружения объекта в зоне.
При этом основными рассматриваемыми задачами являются обнаружение и различение
и (или) идентификация объекта контроля [2]. Выход: зона наблюдения, представленная в виде
многоугольника, цвет граней многоугольника отображает вид поставленной задачи в зоне.
5. Определение набора условий и критериев для каждой задачи, при которых на основе экспертных заключений, рекомендаций министерств и ведомств, нормативных актов и т. д.
будет возможно выполнить поставленную задачу.
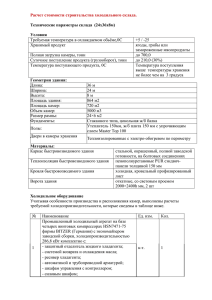
6. Выполнение процедуры выборки и подбора камер для решения поставленной
задачи в зоне наблюдения. Для работы алгоритма используется уже прореженная БД камер
со следующими характеристиками (рис. 1):
− фирма производителя;
− надежность;
− черно-белая или цветная;
− возможность перехода в ночной режим работы;
− максимальная освещенность в зоне видеонаблюдения;
− возможность работы при прямом световом потоке (это необходимо, когда нужно увидеть номер въезжающей на КПП машины с включенными фарами);
− чувствительность камеры;
− цена;
− прочие отличительные свойства камер.
Вход: БД камер; задача и условия выполнения задачи;
Выход: сокращенная БД камер, которые могут выполнить задачу в зоне.
Перебор осуществляется на основе таблицы дополнительных свойств камеры.
Перечень зон
на объекте
Функции
формирования
задач
Перечень
Перечень
задач с привязкой
к зоне наблюдения
Определение условий
выполнения задач
угроз
Перечень
требований заказчика
Функции поиска камер
и составления
рабочей БД
Общая БД камер и их
технических характеристик
Рабочая БД камер и их технических характеристик
Рис. 1. Алгоритм прореживания БД
83
ISSN 2072-9502. Âåñòíèê ÀÃÒÓ. Ñåð.: Óïðàâëåíèå, âû÷èñëèòåëüíàÿ òåõíèêà è èíôîðìàòèêà. 2012. № 2
7. Выполнение процедуры формирования множества точек возможного размещения
камер на плане объекта защиты. Множество точек возможного размещения камер зависит
от полученных решений алгоритма нахождения оптимального решения по требуемым условиям
заказчика и от самих требований заказчика [3].
8. Составление множеств наблюдаемых объектов в точке наблюдения. В процессе составления множеств наблюдаемых объектов в точке наблюдения необходимо определить все
возможные объекты, которые видимы в выбранной точке наблюдения. Эта процедура проводится с углом обзора в 360 °.
Вход: координаты точки наблюдения, множество всех объектов с координатами узловых
точек, допустимый процент закрытия.
Выход: видимые объекты с углом охвата 360 °.
Начало процедуры видимости объектов с учетом угла 360 °.
mVO – множество видимых объектов с координатами узловых точек.
8.1. Проверка условия закрываемости объектов и составление нумерованного множества
полностью открытых объектов. При нахождении всех объектов, которые не закрыты другими
объектами, должно быть не выполнено следующее составное условие:
min угол крайнего луча N-го объекта ≤ ∠КЛО n
или
∠КПО n ≤ мах угла крайнего луча N-го объекта
и
dsk = TK x2 + TK y2 tsk x2 + tsk y2 ,
где dsk – длина рассматриваемого в данной итерации вектора; TK – точка камеры; tsk – некая
точка некоторого объекта, рассматриваемая в итерации; ∠КЛО – угол, образованный вектором
от точки обзора камеры до крайней левой точки объекта; ∠КПО – угол, образованный вектором от точки обзора камеры до крайней правой точки объекта.
Если это условие не выполняется, то во множество mVO добавляется новый незакрытый
объект и указывается, что этот объект виден полностью. Иначе объект, который невозможно
наблюдать полностью, помещается во множество закрытых объектов – mNVO.
8.2. Нахождение объектов закрытыми в допустимых пределах, среди тех объектов,
которые были закрыты другими объектами. Такие объекты будут считаться видимыми,
но с рассчитанными ограничениями. Если объект виден в допустимых пределах, то объект и его
координаты добавляются во множество видимых объектов, указывается рассчитанный показатель закрытости объекта.
9. Нахождение методом ветвей и границ множества видимых объектов в каждой
ротации и координаты их узловых точек для рассматриваемого объекта. Для этого используем процедуру определения видимости группы объектов в заданной точке выбранной камеры.
Чтобы не перегружать алгоритм перебором каждого градуса поворота камеры, введем понятие ротации камеры, т. е. направление камеры на тот или иной объект с учетом занимаемого
места объекта на экране монитора. Объекты, которые считаются закрытыми, не рассматриваются в ротациях выбранной камеры в данной точке.
9.1. Поиск всех множеств ротаций с видимыми объектами в них. На каждом множестве
точек возможного расположения камер с некоторым числом ротаций накладываются требуемые
условия выполнения видимости объекта. Например, ротация, которая невозможна вследствие попадания на камеру прямых солнечных лучей, ограничение секторов видимости камер в зависимости от вероятности обнаружения объекта в секторе видимости камер и других факторов. Все вышеперечисленные факторы уменьшают количество ротаций камер и множество всех наблюдаемых объектов в данной точке возможного расположения камеры.
Для каждого объекта определено три положения обзора (т. е. варианта ротации) камеры:
по центру; слева; справа от объекта.
84
Êîìïüþòåðíîå îáåñïå÷åíèå è âû÷èñëèòåëüíàÿ òåõíèêà
В результате получаем точки со множеством ротаций камер, представленные в виде таблицы (табл. 1).
Таблица 1
Таблица объектов со множеством всех видимых объектов в ротациях
Перечень видимых объектов
в данной точке
О1
О2
….
Оn
L
C
R
O1L{о1}
O2L{…}
…
OnL{…}
O1C{о1, о2}
O2C{…}
...
OnC{…}
O1R{о1, о2}
O2R{…}
…
OnR{…}
9.2. Нахождение уникальных вариантов множеств видимых объектов. Сравниваем строки таблицы, и те варианты множеств, которые являются полностью частью другого множества,
исключаем, и в последующих итерациях сравнения они не участвуют. Например, вариант
O1L{о1} исключается, т. к. он является частью O1R{о1, о2}. Вариант O1R{о1, о2} также исключается, потому что он является частью множества O1C{о1, о2}, которое сравнивается последним,
т. к. по понятным причинам ротация, направленная по центру, является приоритетной.
В итоге остаются только более полные множества или множества, в которых присутствуют объекты, отсутствующие в других множествах. В результате остаются только уникальные
комбинации.
Все полученные ротации для камеры в точке передаем в другое нумерованное множество,
построчно добавляя элементы ротаций, и получаем множество уникальных ротаций:
{O1C{о1,о2}, O2L{…}, O2C{…}, O2R{…}, … }.
Индекс этого множества соответствует номеру ротации в точке.
10. Построение общей таблицы множества видимых объектов для всех точек со следующими индексами: Т – вариант точки; К – вариант или модель камеры; R – вариант ротации
камеры в точке (табл. 2).
Таблица 2
Таблица видимых объектов для всех точек
Т
1
К
1
R
1
1
2
1
3
Множество объектов
O1C{о1, о2}
O2L{…}; тут не может быть варианта {о1, о2},
т. к. в этом случае он отсеялся бы в ротации 1
O2C{…}
…….
11. Нахождение точек расположения камер, при сочетании которых можно увидеть
все объекты. По всему множеству для варианта с одной камерой в текущей зоне в ∀T ∀ К проверяется условие видимости всех объектов следующим образом.
Для каждой камеры проверяются множества и суммируются с множеством проверки,
представляющим собой множество, все элементы которого равны 0, с количеством элементов
равным количеству всех объектов в зоне. В процессе проверки в этом множестве, если в нем
есть некий объект, например О1, в соответствующем индексе матрицы проверки значение возрастает на единицу и т. д. Для двух камер сравниваются по 2 множества и суммируются аналогично и т. д. Если в этом множестве имеется элемент равный 0, то такое решение исключается,
т. к. это означает, что в этом варианте перебора есть «невидимые» объекты. Следовательно, для
видимости всех объектов требуется большее количество точек наблюдения и в следующей итерации алгоритм суммирует на одно множество больше. Так продолжается до тех пор, пока
не будут найдены все решения, во множестве проверки которых не будет содержаться элементов равных 0. При переборе нужно учитывать, что нельзя устанавливать камеры более одного
раза в одну точку или одну камеру более чем в одном варианте ротации в точке установки. Для
этого сравнение необходимо проводить так, чтобы следующий элемент сравнения с Тi + 1 был
больше Тi камеры предшествующей операции. Вследствие этого не будут сравниваться варианты в одной точке, и сравнение пройдет «треугольником» по матрице.
85
ISSN 2072-9502. Âåñòíèê ÀÃÒÓ. Ñåð.: Óïðàâëåíèå, âû÷èñëèòåëüíàÿ òåõíèêà è èíôîðìàòèêà. 2012. № 2
12. Нахождение оптимального варианта. Из табл. 2, по требуемым условиям заказчика,
нетрудно определить оптимальный вариант. Например, заказчик может поставить следующие
условия: использовать камеры только конкретной фирмы; использовать камеры с датчиками
движения; находить решения системы наблюдения с наименьшими финансовыми затратами.
Так, если нужно найти вариант покрытия территории с наименьшими затратами, достаточно
просуммировать стоимость камер для каждого решения и найти среди них вариант с наименьшей ценой.
Ниже приведена блок-схема алгоритма поиска вариантов расстановки камер с указанием
основных функций, необходимых для работы алгоритма, цифрами указаны главные шаги.
Рис. 2. Блок-схема алгоритма автоматического размещения камер на объекте защиты
Приведенный выше алгоритм рассматривает максимальное количество вариантов расстановки камер на объекте и оценивает наблюдаемость объекта защиты [4], приемлемую для заказчика. В процессе его работы учитываются множество внешних факторов и рекомендации экспертов МВД.
86
Êîìïüþòåðíîå îáåñïå÷åíèå è âû÷èñëèòåëüíàÿ òåõíèêà
Заключение
Вне зависимости от развития автоматики роль человека в системах безопасности всегда
будет ключевой, именно за человеком будет сохраняться ответственность за принятие тех или
иных решений. В настоящее время невозможно полностью обойтись без службы безопасности,
выполняющей как минимум патрулирование и мониторинг всей системы защиты,
и группы реагирования на угрозы.
СПИСОК ЛИТЕРАТУРЫ
1. Лукоянов С. В., Белов С. В. Основные требования к системам физической защиты на этапе их
проектирования // Вестн. Астрахан. гос. техн. ун-та. Сер.: Управление, вычислительная техника и информатика. – 2010. – № 2. – С. 163–171.
2. Рекомендации Р 78.36.008–99. Проектирование и монтаж систем охранного телевидения
и домофонов. – М.: НИЦ «Охрана», 1999.
3. Попов Г. А. О систематизации методов поиска оптимальных решений // Вестн. Астрахан. гос. техн.
ун-та. Телекоммуникации, новые информационные технологии и связь: сб. науч. тр. – 2000. – С. 28–33.
4. Белов С. В., Попов Г. А. Оценка наблюдаемости ОЗ телекамерами на основе формирования полного
набора показателей эффективности их функций // Датчики и системы. – 2009. – № 5. – С. 39–47.
Статья поступила в редакцию 13.06.2012
ÈÍÔÎÐÌÀÖÈß ÎÁ ÀÂÒÎÐÀÕ
Ëóêîÿíîâ Ñåðãåé Âëàäèìèðîâè÷ – Àñòðàõàíñêèé ãîñóäàðñòâåííûé òåõíè÷åñêèé óíèâåðñèòåò;
àñïèðàíò êàôåäðû «Èíôîðìàöèîííàÿ áåçîïàñíîñòü»; lsv_x@mail.ru.
Lukoyanov Sergey Vladimirovich – Astrakhan State Technical University; Postgraduate Student
of the Department "Information Security"; lsv_x@mail.ru.
Áåëîâ Ñåðãåé Âàëåðüåâè÷ – Àñòðàõàíñêèé ãîñóäàðñòâåííûé òåõíè÷åñêèé óíèâåðñèòåò; êàíä. òåõí.
íàóê, äîöåíò; ñòàðøèé
SSBelov@yandex.ru.
íàó÷íûé
ñîòðóäíèê
êàôåäðû
«Èíôîðìàöèîííàÿ
áåçîïàñíîñòü»;
Belov Sergey Valerievich – Astrakhan State Technical University; Ñandidate of Technical Sciences, Assistant Professor; Senior Research Assistant of the Department "Information Security", SSBelov@yandex.ru.
87