Накапливающаяся вероятность обнаружения объектов в зоне
advertisement

Накапливающаяся вероятность обнаружения объектов в зоне контроля…
УДК 681.518.22
Накапливающаяся вероятность обнаружения объектов
в зоне контроля радиотехнических охранных устройств
Владимир Иванович Воловач, к.т.н., доцент, зав. каф. «Информационный
и электронный сервис», e-mail: ssunrise@mail.ru
ГОУ ВПО «Поволжский государственный университет сервиса» (ПВГУС), г. Тольятти
Введены понятия мгновенных вероятностей обнаружения объектов радиотехническими охранными устройствами; представлены аналитические выражения для их нахождения при хороших, нормальных и плохих условиях наблюдения; рассмотрено
использование интенсивности обнаружения цели по дальности для количественной оценки эффективности устройств охраны; получены выражения оценок ожидаемой вероятности обнаружения движущегося объекта как в постоянных, так и в изменяющихся условиях наблюдения.
Concepts of instant probabilities of detection of objects by radio engineering security devices are introduced; analytical expressions
for their detection under good, normal and bad conditions of supervision are presented; use of intensity of detection of the purpose on
range for a quantitative estimation of efficiency of devices of protection is considered; expressions of estimations of expected probability of detection of moving object both in constants, and in changing conditions of supervision are received.
Ключевые слова: мгновенные вероятности обнаружения, интенсивность обнаружения цели по дальности, ожидаемая вероятность обнаружения.
Keywords: instant probabilities of detection, intensity of detection of the purpose on the range, expected probability of detection.
При создании и теоретическом анализе любых радиотехнических охранных устройств (так называемых РУО) приходится решать нескольких локальных задач [1], среди которых одной из важнейших
является разработка и оценка показателей эффективности радиотехнических охранных устройств с
учетом протяженного характера обнаруживаемых
объектов, непрерывно изменяющейся дальности, а
также различных законов распределения мгновенной вероятности обнаружения. В работе [2] был
рассмотрен вопрос нахождения достоверного закона распределения дальности действия системы охранной сигнализации применительно к движущемуся протяженному объекту в зависимости от скорости его движения, характера отражающей поверхности, условий работы радиотехнических устройств охранной сигнализации, с учетом статистических характеристик отраженных сигналов, а также формы диаграммы направленности радиолокационного РУО.
В [3] получены оценки достоверности обнаружения протяженных объектов на основе статистических распределений дальности РУО, а также
аналитические соотношения для функции распределения дальности действия устройств охранной
сигнализации, позволяющие оценить вероятность
обнаружения протяженного объекта, расположенного в зоне действия радиолокационного устройства наблюдения.
Рассмотрим сначала мгновенные вероятности
обнаружения объектов охранными системами. В
зависимости от конструктивных особенностей охранных систем и способов их использования, обследование пространства в процессе проведения
поиска может быть непрерывным во времени или
состоять из отдельных мгновенных актов [4, 5].
Обследование следует отнести к непрерывному процессу, если наблюдатель неизменно фиксирует свой «взгляд» на некоторой части пространства или если наблюдение ведется с помощью средства ненаправленного действия.
Если средства направленного действия используются для обследования пространства в пределах некоторого угла, значительно превышающего ширину диаграммы направленности этих
средств, то его следует рассматривать как обследование, состоящее из ряда отдельных мгновенных актов. При этом промежутки времени, через
которые производятся мгновенные акты наблюдения, будут зависеть от величины обследуемого угла и угловой скорости обследования. Иногда эти
промежутки могут быть настолько малы, что обследование можно считать непрерывным.
В общем же случае решение о том, к какому
способу отнести обследование, зависит от того, какой из них обеспечивает наибольшую точность описания процесса установления приборного контакта.
В том случае, когда обследование состоит из
отдельных актов, важным критерием для оценки
эффективности средств наблюдения при поиске
является мгновенная (элементарная) вероятность g
обнаружения объекта на данной дальности путем
одного мгновенного наблюдения.
Электротехнические и информационные комплексы и системы № 1, т. 7, 2011 г.
17
СИСТЕМЫ, СЕТИ И УСТРОЙСТВА ТЕЛЕКОММУНИКАЦИЙ
Если в процессе проведения поиска осуществляется непрерывное обследование, то для оценки
эффективности средств наблюдения используется
такой критерий, как мгновенная (элементарная)
вероятность γdt обнаружения в течение очень короткого промежутка времени dt. При этом величина γ является интенсивностью (мгновенной плотностью вероятности) числа обнаружений.
Рассмотренные характеристики являются статистическими, т. е. могут быть найдены из опыта
[5]. При этом используют формулы
g =1 n ,
(1)
γ =1 t ,
(2)
где n – математическое ожидание числа обзоров, за
которое обеспечивается обнаружение объекта охранным устройством; t – математическое ожидание
времени, за которое обеспечивается обнаружение
объекта с момента включения охранной системы.
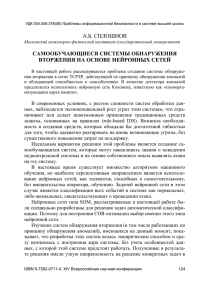
Возможность применения величин g и γ для
количественной характеристики эффективности
охранных средств как приборов обнаружения
обеспечивается возможностью определения на
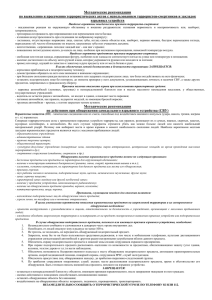
практике статистических распределений дальности обнаружения объектов и построения на их основе зависимостей g(R) и γ(R) для рассматриваемых типичных условий наблюдения. Графики g(R)
и γ(R) для хороших (ЭПР = 100 м2), нормальных
(ЭПР = 10 м2) и плохих (ЭПР ≤ м2) условий наблюдения представлены на рис. 1 [5].
Кроме этих двух характеристик можно использовать и третью, называемую интенсивностью
(мгновенной плотностью вероятности) обнаружения цели по дальности:
f = − dϕ dR ,
(3)
где ϕ = ϕ ( R ) – потенциал обнаружения, который
находится из уравнения
(4)
P = P ( R ) = 1 − exp {−ϕ }.
Отсюда
ϕ = − ln(1 − P ) = ln {1 [1 − P( R)]}.
(5)
Таким образом,
f = − dϕ dR = − P ( R ) [1 − P ( R ) ].
(6)
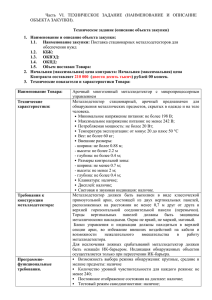
Зная закон распределения P(R), можно найти
аналитическое выражение для f. Например, для нормального закона распределения P(R) значение f определяется через функцию Лапласа Ф по формуле
{
f = N (mR ,σ R2 ) ⎡0,5 ⎡⎣1 + Ф ( R − mR )
⎣
18
}
2σ R ⎤⎦ ⎤ . (7)
⎦
Рис. 1. Вероятностные характеристики обнаружения для различных условий наблюдения
Рис. 2. Вероятностные характеристики обнаружения цели по
дальности
Сравнительные графики функций P(R), ϕ(R) и
f(R) приведены на рис. 2.
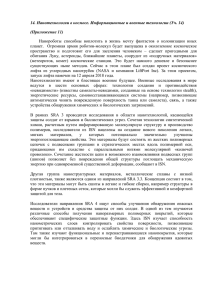
Общий случай зависимости f(R) для различных охранных систем, например, для рассмотренной в [6], представлен на рис. 3, из которого видно, что для приборов наблюдения невысокой эффективности вероятность обнаружения будет всегда меньше единицы. Для наиболее эффективных
приборов наблюдения достоверное обнаружение
происходит на некоторой дальности Rд.
Между рассмотренными характеристиками
существует определенная связь [5], которая выражается следующими формулами:
γ = fVоб ,
(8)
(9)
g = 1 − exp(−γ T ),
где Vоб – скорость движения объекта; Т – период
обзора.
Исходя из (8) и (9)
f = γ Vоб = [ ln1 (1 − g ) ] VобT .
(10)
Эффективность процесса установления контакта с объектом за то или иное время может быть
Электротехнические и информационные комплексы и системы № 1, т. 7, 2011 г.
Накапливающаяся вероятность обнаружения объектов в зоне контроля…
Рис. 3. Зависимости интенсивности обнаружения цели для различных охранных систем невысокой эффективности (а), с «мертвой» зоной (б), относительно высокой эффективности (в) и наиболее эффективных (г)
оценена с помощью накапливающихся (нарастающих) вероятностей обнаружения объекта [4, 5].
Рассмотрим данный вопрос поэтапно для различных условий наблюдения и различного характера
поведения объекта.
Прежде всего остановимся на ожидаемой вероятности обнаружения объектов охранными системами. Будем рассматривать два типичных случая: неизменяющиеся и изменяющиеся условия
наблюдения.
При неизменяющихся условиях наблюдения
следует полагать, что g = const и γ = const. Если
используется охранная система дискретного действия и обнаружение объекта в каждый сеанс обнаружения представляет собой зависимое событие, вероятность Р(n) обнаружения объекта хотя
бы один раз при n мгновенных наблюдениях можно найти в соответствии с теоремой о повторении
независимых опытов по формуле [7, 8]
P (n) = 1 − (1 − g ) n .
(11)
Из этой формулы вытекает важный для практики вывод: когда физические условия, в которых
производится обнаружение, обеспечивают некоторую вероятность g обнаружения при одном мгновенном наблюдении, то, как бы она мала ни была,
вероятность Р(n) может быть сколь угодно близка
к единице при достаточно большом n, т. е. событие, заключающееся в обнаружении объекта, почти наверняка наступит.
Если обследование производится непрерывно
в течение времени t при неизменных физических
условиях, вероятность обнаружения объекта Р за
время t определяется формулой
(12)
P (t ) = 1 − exp(−γ t ).
Из (12) видно, что, имея значение величины γ
и задаваясь временем наблюдения t, можно рассчи-
тать вероятность обнаружения объекта при неизменяющихся условиях наблюдения (в частности, при
неизменной дальности до объекта, т.е. R = сonst).
При рассмотрении изложенного было принято,
что объект находится на определенном расстоянии
от прибора наблюдения, которое с течением времени не меняется, и при этом предполагалось, что γ
также не меняется с течением времени t.
Видно, что величина γt, стоящая в степени в
выражении (12), как бы мала ни была величина γ,
теоретически может быть бесконечно велика, так
как всегда возможно выбрать такое время наблюдения t, при котором вероятность обнаружения
P(t) будет близкой к единице.
При изменяющихся условиях наблюдения
полагают, что g = var, γ = var.
Изменяющиеся значения мгновенных вероятностей обозначим через gi и γdt, где gi – элементарная вероятность обнаружения объекта для i-го мгновенного наблюдения, а γdt – плотность вероятности
обнаружения объекта, изменяющаяся со временем.
Формулы для расчета вероятностей обнаружения в
данном случае будут иметь следующий вид:
при дискретном обзоре –
n
P(n) = 1− (1− g1)(1− g2 )"(1− gn ) = 1−
∏(1− g ); (13)
i
i=1
при непрерывном обзоре –
⎡ t
⎤
⎡ t
⎤
P (t ) = 1 − exp ⎢ − γ t dt ⎥ = 1 − exp ⎢ − γ t dt ⎥ .
⎢⎣ 0
⎥⎦
⎢⎣ 0
⎥⎦
∫
∫
(14)
Рассмотрим далее оценку ожидаемой вероятности обнаружения подвижного объекта. Как и в
предыдущем случае, начнем рассмотрение с более
простого случая – неизменяющихся условий наблюдения (g = const, γ = const).
Электротехнические и информационные комплексы и системы № 1, т. 7, 2011 г.
19
СИСТЕМЫ, СЕТИ И УСТРОЙСТВА ТЕЛЕКОММУНИКАЦИЙ
Для быстро движущихся объектов можно
считать, что за время их движения в зоне действия
охранной сигнализации, ограниченной предельной
дальностью обнаружения Rn, не происходит существенного изменения физических условий наблюдения, а соответственно, и не происходит связанных с этим изменений величин g и γ. Такое допущение в ряде случаев вполне допустимо и даже
закономерно.
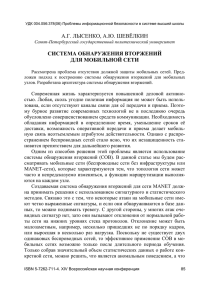
Поэтому можно считать, что в зоне, ограниченной радиусом Rn (рис. 4), изменение величин g
и γ будет обусловлено лишь перемещением объекта в зоне действия прибора наблюдения (изменением его относительного местоположения).
ние g и γ), является наиболее общей. В этом случае
gt = gt(R, t) и γt = γt(R, t) и формулы для определения
P(n) и P(t) выглядят следующим образом:
n
P ( n) = 1 −
∏[1 − g ( R, t )],
t
(17)
i =1
⎡ t
⎤
P (t ) = 1 − exp ⎢ − γ t ( R, t )dt ⎥ ,
⎢⎣ 0
⎥⎦
∫
(18)
где gt(R, t) и γt(R, t) – значения, которые выбираются
применительно к соответствующим условиям, характерным для каждого i-го наблюдения. Однако
для прямого расчета величины P(t) по формулам
(16) и (18) необходимо найти аналитические выражения для законов изменения γt(R) и γt(R, t).
Фактическим результатом проведенных исследований является разработка и уточненная оценка ряда
показателей эффективности радиотехнических охранных устройств для различных условий обнаружения объекта.
ЛИТЕРАТУРА
1.
Рис. 4. Траектория возможного движения объекта в зоне обнаружения РУО
Таким образом, g и γ являются функциями
текущей дальности до объекта r, обозначаемой
внутри зоны действия охранной системы как R,
т. e. Gi = gi(r) = gi(R) и γi = γi(r) = γi(R). При этом
Р(n) и P(t) могут быть определены по формулам
2.
3.
n
P ( n) = 1 −
∏[1 − g ( R)],
i
(15)
i =1
⎡ t
⎤
P (t ) = 1 − exp ⎢ − γ i ( R )dt ⎥ ,
⎢⎣ 0
⎥⎦
∫
(16)
5.
где gi(R) и γi(R) – значения, которые могут быть
выбраны оператором охранной системы.
При изменяющихся условиях наблюдения
(g = var, γ = var) возможно прийти к следующему.
Ситуация, при которой g и γ есть функции не только текущей дальности до объекта R, но и текущего
времени t (так как с течением его меняются условия
наблюдения, вызывающие, в свою очередь, измене-
20
4.
6.
7.
8.
Воловач В. И. Обоснование моделей возмущающих воздействий на радиотехнические устройства охранной сигнализации // Изв. Самарского научного центра РАН.
Спец. выпуск «Наука – промышленности и сервису».
Самара: Изд-во Самарского научного центра РАН. 2006.
С. 71 – 78.
Воловач В. И. Определение вероятности обнаружения
протяженных объектов радиотехническими устройствами охранной сигнализации // XII Междунар. научн.-техн.
конф. «Радиолокация, навигация, связь». Сборник докладов конференции. Том III. Воронеж: НПФ «САКВОЕЕ»
ООО. 2006. С. 2000 – 2009.
Воловач В. И. Оценка достоверности обнаружения объекта
по статистическому распределению дальности действия радиотехнических устройств охранной сигнализации // Изв.
Самарского научного центра РАН. Спец. выпуск «Наука –
промышленности и сервису». Выпуск 2. Самара: Изд-во
Самарского научного центра РАН. 2006. С. 134 – 144.
Куликов Е. И., Трифонов А. П. Оценка параметров сигнала на фоне помех. М.: Сов. радио. 1978.
Абгук В. А., Суздаль В. Г. Поиск объектов. М.: Сов. радио. 1977.
Воловач В. И. Реализация оптимальной структуры обнаружения радиотехнических устройств охранной сигнализации // Электротехнические и информационные комплексы и системы. 2009. Т. 5. № 2. С. 43 – 49.
Попов Б. А., Теслер Г. С. Вычисление функций на ЭВМ.
Киев: Наукова думка. 1984.
Левин Б. Р., Шварц В. Вероятностные модели и методы в
системах связи и управления. М.: Радио и связь. 1985.
Поступила 30.12.2010 г.
Электротехнические и информационные комплексы и системы № 1, т. 7, 2011 г.