ДИНАМИЧЕСКИЕ ОШИБКИ ОПРЕДЕЛЕНИЯ КООРДИНАТ
advertisement

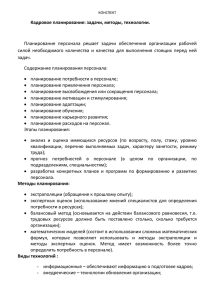
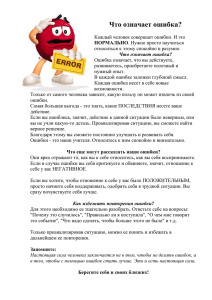
НАУЧНЫЙ ВЕСТНИК МГТУ ГА сер. Радиофизика и радиотехника 2007 № 117 УДК 629.7.351 ДИНАМИЧЕСКИЕ ОШИБКИ ОПРЕДЕЛЕНИЯ КООРДИНАТ ВОЗДУШНОГО СУДНА ПРИ УПРАВЛЕНИИ ВОЗДУШНЫМ ДВИЖЕНИЕМ С АВТОМАТИЧЕСКИМ ЗАВИСИМЫМ НАБЛЮДЕНИЕМ В.Б. ВЫЧУГЖАНИН, Д.В. РУБЦОВ Статья представлена доктором технических наук, профессором Рубцовым В.Д. Рассматривается влияние периодичности передачи навигационных данных при управлении воздушным движением с автоматическим зависимым наблюдением на динамические ошибки определения координат воздушного судна. Большинство сообщений, передаваемых при управлении воздушным движением (УВД) с автоматическим зависимым наблюдением (АЗН), подвержено “старению”. Задержка при их передаче приводит к снижению точности, содержащейся в них информации, и в первую очередь информации о координатах воздушного судна (ВС), содержащейся в основном сообщении. Эффективность функционирования системы УВД с АЗН может характеризоваться вероятностью Р непревышения ошибки определения местоположения ВС при АЗН ∆хАЗН допустимой ошибки ∆хдоп заданной величины Рзад., то есть Р (∆хАЗН ≤ ∆хдоп ) ≤ Рзад. (1) Точность определения местоположения ВС любым навигационным средствам определяется ошибкой измерения∆хи. В режиме АЗН информация о местоположении ВС, определенном на борту, передается по каналу связи в центр УВД. Ошибка измерения зависит от точности навигационных средств и характера обработки навигационной информации в бортовом пилотажнонавигационном комплексе (БПНК). Эта ошибка входит в суммарную ошибку определения местоположения ВС. Вопрос об анализе точности навигационных систем является важной самостоятельной задачей. Поэтому при оценке ошибки измерения ограничимся рекомендациями комитета ИКАО FANS[1], согласно которым навигационные комплексы по точности подразделяются на 7 уровней, начиная от точности 56 км для инерциональных навигационных систем (ИНС) до точности 100 м (с доверительной вероятностью Р = 0,95, что соответствует 2-м СКО) для глобальных навигационных спутниковых систем (CNNS) типа GPS и ГЛОНАСС, на использование которых ориентирована концепция интегрирования систем связи, навигации и наблюдения при УВД (CNS/АТМ). Вторая группа факторов, влияющих на ошибку ∆хАЗН, связана с дискретностью передачи информации о местоположении ВС. В центре УВД по дискретным сообщениям путем экстраполяции восстанавливается непрерывная траектория движения ВС. При равномерном прямолинейном движении ВС в отсутствие возмущающих воздействий ошибка экстраполяции может быть сведена к нулю. Однако в реальных условиях ВС может осуществлять управляемый маневр, а также подвергаться воздействию атмосферных возмущений. Возникающую при этом ошибку в определении местоположения ∆хд будем называть динамической, поскольку она определяется динамикой движения ВС. Ошибка ∆хд является случайной и зависит от интенсивности и продолжительности управляемого маневра и атмосферных возмущений, а также от периодичности передаваемых сообщений АЗН. При этом динамическая ошибка ∆хд будет максимальной в предположении, что ВС сразу после передачи сообщения АЗН осуществляет максимально допустимый маневр при наиболее неблагоприятном атмосферном воздействии. При движении ВС гражданской авиации (ГА) по трассе единственным допустимым манев- Динамические ошибки определения координат воздушного судна при управлении ... 175 ром, не считая смены воздушного эшелона, является горизонтальный вираж, осуществляемый плавным вводом ВС в движение по окружности путем изменения угла крена. При этом максимальная интенсивность виража определяется минимальным радиусом разворота R0, определяемым, в свою очередь, максимально допустимым углом крена γ и максимальной истинной воздушной скоростью Vи [2]: R0 = (Vи2/ g) tg γ, (2) где g = 9,8 м/с2 - ускорение свободного падения. Наиболее неблагоприятным атмосферным воздействием с точки зрения влияния на боковое отклонение ВС от линии заданного пути (ЛЗП) является ветер, направленный по нормали к линии экстраполяции и имеющий наибольшую скорость. При этом максимальная величина бокового отклонения ВС от линии экстраполяции (рис. 1) за время ∆t равна ∆хд (∆t)= R0[cos ∆ψ0 - cos (∆ψ0 + β)] + Umax ∆t, (3) где ∆ψ0 - максимально возможный угол отклонения оси ВС (от линии экстраполяции в момент передачи предыдущего сообщения; β - максимальный угол поворота ВС за время ∆t, определяемый выражением β = Vи ⋅ ∆t / R0; (4) Umax - максимальная скорость ветра в направлении нормали к линии экстраполяции; ∆t - время от момента начала передачи сообщения АЗН до момента получения в центре УВД следующего сообщения; остальные обозначения - прежние. На рис. 1 показана возможная траектория движения ВС из точки А-1 в точку А1 через А0. При этом предполагается, что на участке предварительного маневра от А-1 до А0 ВС движется таким образом, чтобы к моменту t0 передачи очередного сообщения АЗН угол в точке А0 между осью ВС и линией экстраполяции ∆ψ0 достиг максимума. β ∆ψ0 + β R0 t1 А1 ∆xд ∆ψ0 А-1 t-1 t0 Линия экстраполяции А0 ∆хи А0и Рис. 1. К расчету бокового отклонения ВС от линии экстраполяции при горизонтальном вираже в условиях атмосферных возмущений Из точки А0 ВС осуществляет вираж с максимально допустимым креном γ и в момент t1 передачи очередного сообщения АЗН оказывается в точке А1. При этом возникает динамическая ошибка ∆хд, равная расстоянию между точкой А1 и линией экстраполяции, проведенной через точки А -1 и А0. Наиболее неблагоприятной с точки зрения величины динамической ошибки яв- 176 В.Б. Вычугжанин, Д.В. Рубцов ляется ситуация, когда в момент t1, значение угла между осью ВС и линией экстраполяции составляет 90°, причем максимум динамической ошибки сохраняется при условии, что в момент t1 движение ВС по окружности с радиусом R0 прекращается и далее оно движется по нормали в сторону от линии экстраполяции. Третья группа факторов, влияющих на ∆хАЗН, связана с задержкой при передаче сообщений АЗН по каналам связи τз, складывающейся из задержки при распространении сигнала τр; задержки при обработке сообщения в аппаратуре τап, задержки при анализе τан, определяемой временем, необходимым диспетчеру центра УВД для восприятия и осмысления информации, и задержки при передаче сообщения по сети связи τс, связанной с повторной передачей сообщения при обнаружении ошибок, ожиданием в очереди при перегрузке сети, коммутацией сообщений при передаче их по трафику, содержащему несколько разнородных каналов связи. В результате задержки при передаче сообщений АЗН время экстраполяции будет возрастать и составлять величину ∆t = Т + τз , (5) где Т - период обновления информации при АЗН, τз = τр + τап + τан + τс . (6) Соответственно, будет возрастать динамическая ошибка определения местоположения ВС при АЗН, определяемая с учетом (3) и (4) выражением (7) ∆хд (∆t)= R0[cos ∆ψ0 - cos (∆ψ0 + Vи ∆t /R0)] + Umax ∆t, что приведет к увеличению суммарной ошибки при АЗН ∆хАЗН = ∆хи + ∆хд (∆t). (8) Заметим, что ошибка измерения ∆хи на рис. 1 показана как расстояние между точкой А0и , соответствующей истинному положению ВС, неизвестному ни на борту, ни в центре УВД А0, из-за ошибки измерения, и точкой А0, соответствующей местоположению ВС в момент времени t0, определенному по показаниям бортовых навигационных средств. Дадим оценку порядка величин составляющих задержки (6). Задержка при распространении τр наиболее существенно при использовании спутниковой ЛПД. При этом время распространения сигнала определяется выражением τр = 2 L / с, (9) где L - расстояние от Земли до ИСЗ, для геостационарных ИСЗ примерно равное 36000 км; с ≅ 3 ⋅ 108 м/с - скорость распространения радиоволн. При этом имеем τр ° ≅ 0,24 с. Если используется перемежение для борьбы с группированием ошибок, то задержка при обработке сообщения в аппаратуре τап, как минимум, равна удвоенной длительности отдельного блока сообщения длиной Lб. При этом τап = 2 Lб / Vп, (10) где Vп - скорость передачи данных. При типовом значении Vп = 1200 бит/с, полагая длину блока сообщения Lб равной объему информации, передаваемой при каждом основном сообщении АЗН равной 90 бит, получаем τап = 0,15 с. Время задержки при анализе сообщения является случайной величиной. Согласно [2] ее можно принять равной τан ≅ 5 с. Наиболее неопределенной является задержка при передаче сообщения по сети связи τс, поскольку она зависит от многих факторов. Так, используемый обычно в каналах передачи данных код БЧХ, обнаруживая ошибки в сообщении, не позволяет их исправить. При этом возникает необходимость в повторной передаче сообщения, что удлиняет задержку на величину периода обновления информации Т, при автоматической передаче сообщений АЗН равную, как отмечалось, примерно 10 с. Вероятность такой случайной задержки определяется вероятностью сбоя в сообщении и зависит от помехоустойчивости используемого канала связи. Вероятность возникновения очереди в канале связи при передаче сообщений и длина ее зависят от интенсивности воздушного движения (ИВД), являющейся случайной величиной. Задержка, обуслов- Динамические ошибки определения координат воздушного судна при управлении ... 177 ленная коммутацией сообщений, зависит от типа используемого трафика. Задержка при передаче сообщений по сети может достигать нескольких минут и является наиболее значимой составляющей задержки τз и, соответственно, времени экстраполяции ∆t. На рис. 2 показан характер зависимости динамической ошибки ∆хд от ∆t при различном сочетании влияющих на нее факторов, рассчитанной с использованием выражений (2) и (4). Если ВС движется прямолинейно без маневров и сразу после передачи сообщения АЗН на него начинает воздействовать боковой ветер под прямым углом к линии экстраполяции с максимальной скоростью Umax = 50 м/с (180 км/ч), то ∆хд будет линейно возрастать с ростом ∆t и для ∆t = 300 с (5 мин) достигает 15 км (кривая 1). Если ВС в момент передачи предыдущего сообщения АЗН имело крен γ = 3° и сохраняло его до момента приема в центре УВД следующего сообщения, то при скорости ВС Vи = 250 м/с, скорости ветра Umax = 0 м/с и угле ∆ψ0 = 0° за время ∆t = 300 с оно сместится на 22 км (кривая 2а). При угле крена γ = 15° и тех же, что и прежде остальных параметрах динамическая ошибка составит ∆хд = 61,5 км (кривая 2в). Наконец, при максимально допустимом для ВС ГА угле крена γ = 30° эта ошибка равна 69 км (кривая 2с). ∆хд, км 1,0 3 ∆хд, км 4а 4в 0,8 70 1 2с 0,6 4в 2в 60 0,4 2а 4а 0,2 3 ∆t, c 50 0 2 4 6 8 2с 10 40 2в 30 20 2а 1 10 ∆t, c 0 10 30 60 90 120 150 180 210 240 270 300 Рис. 2. Зависимость динамической ошибки определения местоположения ВС при АЗН от времени экстраполяции Как видно из приведенных на рис. 2 графиков при малых значениях ∆t ≤ 10 с и начальном угле ∆ψ0 = 0° ошибка за счет ветра больше ошибки за счет управляемого маневра даже при максимальном угле крена γ = 30°. Это объясняется тем, что при маневре необходимо время для того, чтобы составляющая скорости ВС, направленная от линии экстраполяции, приобрела значение, превышающее скорость ветра. В.Б. Вычугжанин, Д.В. Рубцов 178 При начальном угле ∆ψ0 = 12°, скорости ВС Vи = 250 км/ч, скорости ветра Umax = 0 м/с и угле крена γ = 30° (кривая 3) за время ∆t = 10 с ВС за счет маневра успевает сместиться от линии экстраполяции на большее расстояние, чем за счет ветра (кривая 1). При параметрах движения ВС во время маневра, соответствующих кривой 3, и одновременном воздействии бокового ветра со скоростью Umax = 50 м/с динамическая ошибка существенно возрастает (кривая 4а). Кривая 4в построена при значениях параметров движения ВС ∆ψ0 = 90°, Vи = 250 км/ч, γ = 30°, скорости бокового ветра Umax = 50 м/с и отражает наиболее неблагоприятную ситуацию, когда ВС сразу же в начальный момент развернут под прямым углом к линии экстраполяции и сразу же начинает удаляться от нее с максимальной скоростью. Эта кривая может служить верхней границей динамической ошибки ∆хд. Из приведенных результатов видно, что динамическая ошибка ∆хд возрастает с увеличением времени экстраполяции ∆t и, если на ВС используются высокоточные навигационные средства, например CNSS типа GPS или ГЛОНАСС, может во много раз превышать ошибку измерения ∆хи. ЛИТЕРАТУРА 1.Доклад 3-го совещания специального комитета ИКАО по будущим аэронавигационным системам. Монреаль: ИКАО, 1986. 2.Агаджанов П.А., Воробьев В.Г., Кузнецов А.А., Маркович Е.Д. Автоматизация самолетовождения и управления воздушным движением. М: Транспорт, 1980. DYNAMIC ERRORS OF DEFINITION OF COORDINATES OF AIRCRAFT BY MANAGEMENT OF AIR MOVEMENT WITH AUTOMATIC DEPENDENT OBSERVATION Vichugzanin V.B., Rubtsov D.V. The influence of period of transmission of navigation dates by management air movement with automatic dependent observation on dynamic errors of definition of coordinates of aircraft is considered. Сведения об авторах Вычугжанин Владислав Борисович, 1968 г.р., окончил Красноярское высшее военное училище радиоэлектроники (1990), начальник отдела ОАО “Красноярские авиалинии”, автор 2 научных работ, область научных интересов - навигация и управление воздушным движением. Рубцов Дмитрий Витальевич, 1982 г.р., окончил МГТУ ГА (2002), аспирант МГТУ ГА, автор 9 научных работ, область научных интересов - навигация и управление воздушным движением.