Использование биологического прототипа при проектировании
advertisement

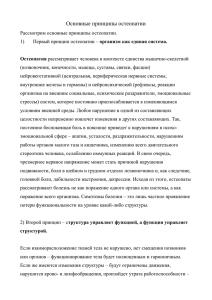
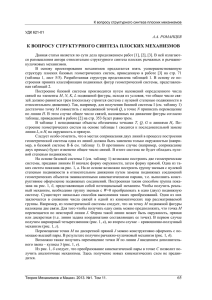
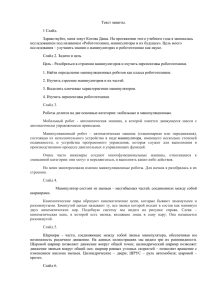
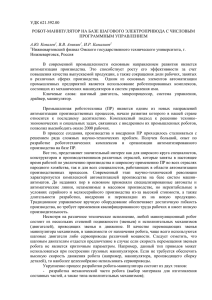
УДК 681.5 Использование биологического прототипа при проектировании древовидных исполнительных механизмов двуногих шагающих роботов А.К. Ковальчук КОВАЛЬЧУК Александр Кондратьевич кандидат технических наук, доцент, директор МИПК (МГТУ им. Н.Э. Баумана) Предлагается при разработке математических моделей древовидных исполнительных механизмов двуногих шагающих роботов и их проекти ровании в качестве биологического прототипа использовать скелет че ловека. Рассмотрена математическая модель древовидного исполни тельного механизма. Приведен расчет требуемых моментов и мощности, развиваемых при водами в степенях подвижности при различных нагрузках на исполни тельный механизм. Ключевые слова: шагающий робот, древовидный исполнительный механизм, уравнение динамики робота. When developing the mathematical models of treeactuator of bipedal walking robots and designing it is proposed to use the human skeleton as a biological prototype. The mathematical model of the threeactuator is considered. The calculation of the required moments and power developed by the actuators in the degrees of mobility for various loads on the actuator are presented. Keywords: walking robot, treelike actuator, dynamic equation of robot. создании интеллектуального двуного шагающего робота При (ДШР) возникает много научных и технических проблем. При ведем некоторые из них. 1. Для осуществления сложных координированных движений ДШР должен содержать большое количество управляемых степеней подвижности (человек имеет около 330). Управлять многозвенной системой, содержащей более 300 приводов, традиционными методами теории управления не представляется возможным. Необходимы но вые методы анализа и синтеза, учитывающие специфику ДШР. Одним из перспективных направлений для построения систем управления ДШР является использование нейронных сетей. 2. Исполнительный механизм ДШР имеет переменную структуру, изменяющуюся как в процессе его движения, так и при выполнении рабочих операций. При этом образуются как разомкнутые, так и замк нутые кинематические цепи, методы анализа и синтеза которых в на стоящее время недостаточно развиты. 2011. ¹ 9 49 При разработке математической модели системы приводов и алгоритмов управления ДШР необходимо учитывать кинематические ограничения в степенях подвижности. 3. С неподвижной поверхностью шагания ДШР связан только за счет сил и моментов тре ния. Силы реакции и трения, а также моменты трения дают важную информацию о движении ДШР и играют принципиальную роль при управлении его движением. Педипуляторы (ноги) ДШР должны быть оснащены датчика ми, измеряющими силы и моменты взаимодей ствия робота с поверхностью шагания. В ДШР существуют неуправляемые (фиктивные) степе ни подвижности (стопа — поверхность шагания). Имеет место своеобразное для робототехники ситуация: мы должны управлять движением ДШР по некоторым неуправляемым (фиктив ным) степеням подвижности. Эта задача носит динамический характер и требует принципиаль но нового подхода к управлению ДШР. 4. В процессе движения, а также при вы полнении рабочих операций существенно ме няются массы, моменты инерции и нагрузки на ДШР. Это требует разработки алгоритмов идентификации его кинематических и динами ческих параметров, причем идентификация должна осуществляться в реальном времени. 5. Бортовой источник питания ДШР распо лагает существенно ограниченной мощностью. Большой научный и практический интерес представляет разработка экономичной адап тивной системы приводов, управляемой мно гопроцессорным комплексом. Перспективным является использование нетрадиционных для современной робототехники приводов (искус ственные мышцы и др.). 6. Для перемещения в изменяющейся внешней среде и выполнения рабочих опера ций ДШР должен быть оснащен системой тех нического зрения (СТЗ). Разрабатываемые в на стоящее время цветные СТЗ позволят получить обширную информацию об окружающей обста новке. Большой интерес представляет создание гибрида инерциальной навигационной систе мы и СТЗ — навигационноинформационной системы. 50 7. Адаптация ДШР к внешней среде воз можна лишь при наличии развитой сенсорной системы. Однако имеющиеся в настоящее вре мя датчики громоздки и мало информацион ны. Создание интеллектуального ДШР требует разработки принципиально новых датчиков, позволяющих ему адаптироваться к изменяю щейся внешней среде и активно в ней функ ционировать. 8. Разработка конструкции ДШР должна осуществляться с использованием современ ных легких и прочных конструкционных мате риалов: металлопластиков, углепластиков и др. 9. Будущее развитие робототехники неиз бежно связано с достижениями в области со временных нанотехнологий, позволяющих реа лизовать в миниатюрном объеме конструкцию, привод, всевозможные датчики и алгоритм управления. При проектировании исполнительных меха низмов (ИМ) ДШР разработчик сталкивается с проблемой выбора их кинематической схемы (КС). В работе [1] предлагается метод восста новления КС высших позвоночных животных по фотографическим изображениям их скеле тов. Этот метод не всегда позволяет получить нужную разработчику КС в силу его ограни ченности допущениями, которые могут не всегда выполняться на практике. Однако, по лученная модель КС может явиться прототи пом, обеспечивающим дальнейшую разработку модели робота. Полученная КС может исполь зоваться для описания кинематики и динамики робота с помощью блочноматричного пред ставления [2, 3]. В качестве биологического прототипа для построения КС ДШР взят скелет человека, имеющий более 300 степеней подвижности. Технически воссоздать такую КС в настоящее время невозможно. Упрощенная КС человека, имеющая 114 степеней подвижности, пред ставлена на рис. 1. В соответствии с работами [2, 3] направленный граф достижимости звень ев такой КС представлен на рис. 2. Создание шагающего робота с такой КС — интересная научная и инженерная проблема, которая ждет своих исследователей. 2011. ¹ 9 Рис. 1. Упрощенная кинематическая схема человека Автор предлагаемой статьи ограничился рассмотрением и исследованием КС роботизи рованного манекена (РМ). Он должен иметь антропоморфную кинематическую структуру с массогабаритными параметрами человека, и выполнять те же движения, которые будет выполнять человек в создаваемом защитном костюме (бег, приседания, прыжки и т. д.), с динамическими характеристиками, свойст венными человеку. Это накладывает специфи ческие требования на ИМ РМ: • геометрические характеристики звеньев такие же, как у человека; • ИМ должен иметь количество степеней подвижности, достаточное для обеспечения кинематического подобия с движениями чело века; • кинематические, динамические и мас согабаритные характеристики приводов долж ны соответствовать аналогичным характери стикам человека; 2011. ¹ 9 Рис. 2. Направленный граф достижимости звеньев для упрощенной КС человека • конструкция звеньев ИМ должна обладать достаточной прочностью, быть стойкой к воз действию агрессивной среды, в которой будут проводиться испытания защитной одежды, и обеспечивать простоту монтажа в испыта тельных камерах; • испытательный комплекс с манекеном должен иметь гибкую программную структуру и развитый интерфейс, обеспечивающий его быстрое перепрограммирование при измене нии режимов движений и методик испытаний. Среди работ по созданию РМ можно выде лить создание манекена в исследовательском центре Battelles Applied Physics Тихоокеанских северозападных лабораторий (США), предна значенный для испытания защитной одежды в смоделированных ситуациях, когда есть риск для жизни людей [2]. 51 В МГТУ им. Н.Э. Баумана создан экспери ментальный образец РМ (рис. 3), предназна ченный для испытания защитной одежды на герметичность в специальных испытательных камерах с агрессивной средой [3]. Образец РМ представляет собой комплекс, включающий антропоморфный ИМ с электрогидравличе скими приводами, насосную станцию и компь ютерную систему управления. Для проведения испытаний защитной одежды ИМ с надетой на нем испытываемой одеждой помещается в ис пытательную камеру, в которой создается воз действие на него агрессивной среды. По ко мандам оператора ИМ в защитной одежде вы п олняет з а програм м ированную сер ию требуемых движений, имитирующих движения человека. С помощью специализированных датчиков, установленных на ИМ под защитной одеждой, оценивается прочность, надежность и эффективность испытываемых средств защи ты. Система управления и насосная станция, вынесенные за пределы испытательной каме ры, обеспечивают управление движением ИМ с электрогидравлическими приводами. Пере Рис. 3. Роботизированный манекен, созданный в МГТУ им. Н.Э. Баумана 52 дача информативных сигналов между ИМ и системой управления осуществляется по ка белю. Гидравлическая энергия на гидроприво ды передается по трубопроводам, вмонтиро ванным в кронштейн крепления ИМ в испыта тельной камере. Конструкция ИМ РМ, оснащенного элек трогидравлическими следящими приводами (ЭГСП), представлена на рис. 4. На роботизированном манекене установле ны электрогидравлические приводы, замкну тые обратными связями по положению. В ка честве датчиков обратной связи использованы потенциометрические датчики, расположен ные внутри шарниров. В сочленениях установ лены только исполнительные гидроцилиндры. Двухкаскадные электрогидравлические усили тели расположены на единой плите в корпусе РМ и соединены с гидроцилиндрами гибкими шлангами. Такая компоновка элементов ЭГСП на РМ позволяет надевать на него различные костюмы, в том числе с капюшоном, а также противогаз. Рис. 4. Конструкция ИМ РМ 2011. ¹ 9 Основные технические характеристики ИМ РМ приведены ниже: Габариты Соответствие телу человека Число степеней подвижности 15 Число степеней подвижности руки 3 Число степеней подвижности ноги 4 Число степеней подвижности корпуса 1 Диапазон отклонений руки от вертикали 90° вперед, 10° назад, 90° в сторону, 10° к себе Диапазон сгибания в пояснице 45° вперед, 15° назад Диапазон отклонения ноги в та зобедренном суставе 60° вперед и в сторо ну, 30° назад и 15° к себе Диапазон сгибания руки в локте вом и ноги в коленном суставе 90° Диапазон качания ступней 20° вверх, 60° вниз Максимальная скорость воспро изведения испытательных движе ний 60 циклов в минуту Давление питания гидроприводов 20 МПа Рабочая жидкость в гидросистеме масло АМГ10 РМ Максимальная скорость воспро изведения испытательных движе ний Число ЭГСП 60 циклов в минуту 15 Частота замыкания контуров ЭГСП 1000 Гц Частота контура регулятора фор мирования траектории движения РМ 100 Гц Тип управляющей ЭВМ IBMсовместимый персональный компь ютер Разрядность ЦАП, АЦП 12 Задание траектории движения Программное форми рование на управляю щей ЭВМ Воспроизведение от дополнительного внешнего задающего устройства Разработанный РМ может работать как в ре жиме отработки заданной траектории движе ния в обобщенных координатах, так и в копи рующем режиме при задании входных сигна 2011. ¹ 9 лов управления движением от внешнего источ ника. При этом управление может осуществ ляться как по положению, так и по развивае мым моментам в сочленениях (при установке соответствующих гидроприводов). В связи с этим встает задача определения требуемых усилий, развиваемых приводами, необходимых для обеспечения заданного движения, как на этапе выбора устанавливаемых приводов, так и на этапе управления РМ. Математическая модель ИМ, учитывающая особенности его кинематической структуры, получена с использованием методики состав ления блочноматричных математических мо делей ИМ, имеющих ветвящуюся кинематиче скую структуру [4, 5]. Кинематическая схема ИМ представляется в виде древовидного на правленного графа (рис. 5). Звенья в таком графе представляются вер шинами, а соединяющие их сочленения — ду гами. Поскольку ИМ РМ закрепляется в ис пытательной камере через кронштейн за туло вище, то принимаем, что верхняя часть туловища неподвижна и определяем его как звено с номером 0 (корень дерева). Остальные звенья ИМ нумеруем, начиная с 1 по возрас тающей без пропусков, двигаясь от корня де рева к его листьям. При этом номер обобщен ной координаты ИМ, как и номер соответст вующего сочленения, такой же, как и у звена, присоединяемого этим сочленением к преды дущему звену. Уравнение движения ИМ, имеющего древо видную кинематическую структуру, относи тельно обобщенных координат записывается в виде A( q )&& q + B ( q, q& )-C ( q ) 0 f в - H (q ) 0 n в = , (1) где A( q ), B( q, q& ), C( q ) и H ( q ) — матричные ко эффициенты, вычисляемые в соответствии с приведенными ниже зависимостями; q — вектор обобщенных координат исполнитель ного механизма; — вектор сил, моментов, развиваемых приводами робота; 0 f в , 0 n в — блочные матрицы внешних сил и моментов, приложенных к звеньям со стороны окружаю щей среды. 53 Рис. 5. Кинематическая схема РМ и описывающий ее древовидный граф тæ 0 D A( q )= σ( 0 z d ) ç è- Λ( c f ) ( ) т ( ) m d D 0 z d ( E - )+ Λт ( 0 c fD ) 0 z d + ) +D т 0 JCd D 0 z d ) + ( E - )( 0 z d ) D т m d (D 0 z d ( E - )+ Λт ( 0 c fD ) 0 z d ; т тì B ( q, q& )= σ( 0 z d ) í - Λ( 0 c fD ) î ( ) ( +Λт Λт ( 0 c fD )σq& d 0 т [ m d Λт ( 0 c fD )Λт ( 0 z d q& d )(D - E ) + z d D + Λт ( 0 c fD )((D - E )σ 0 z d q& ) d )+ + 2DΛт ( 0 z d ( E - )q& d )(D - E )]+ +D т 0 J Cd Dσq& d Λт ( 0 z d )(D - E )+ D т Λ(D 0 z d σq& ) d 0 } z σq& + JCd D 0 d [ +( E - )( 0 z d ) D т m d Λт ( 0 c fD )Λт ( 0 z d q& d )(D - E )+ 2DΛт ( 0 z d ( E - )q& d )(D - E )+ т ( +Λт Λт ( 0 c fD )σq& d C ( q )= σ( 0 z d ) т ((D т 0 z d D + Λт ( 0 c fD )((D - E )σ 0 z d q& ) d )ùû z σq&; 0 d - E )Λ( 0 s d )D т + D т Λ( 0 t d )) + ( E - σ )( 0 z d ) D т ; т H ( q )=σ( 0 z d ) D т . т 54 2011. ¹ 9 Для того чтобы блочноматричное уравне ние (1) динамики ИМ, имеющего древовидную кинематическую структуру, описывало движе ние рассматриваемого в данной статье манеке на, используем обозначения, приведенные в работе [5], и представим требуемые парамет ры ИМ в блочноматричном виде. Составим матрицу достижимости звеньев исполнительного механизма D, описывающую взаимное расположение звеньев исполнитель ного механизма РМ (см. рис. 5): æU 3´3 Θ 3´3 ç çΘ 3´3 U 3´3 ç D15´15 =çΘ1Ч 3 Θ1Ч 3 çΘ4Ч 3 Θ4Ч 3 ç èΘ4Ч 3 Θ4Ч 3 Θ 3´1 Θ 3Ч 1 Θ 3´4 Θ 3Ч 4 Θ1Ч 4 I 1Ч 1 Θ1Ч 1 U 4Ч 4 Θ1Ч 1 Θ4Ч 4 Θ 3´4 ö ÷ Θ 3Ч 4 ÷ ÷ Θ1Ч 4 ÷, Θ4Ч 4 ÷ ÷ U 4Ч 4 ø æ1 0 K 0ö ç ÷ ç1 1 K 0÷ где U =ç ÷; I — матрица, все эле K K K K ç ÷ ç ÷ è1 1 K 1ø дят равнодействующие внешних сил, прило женных к звеньям. Моделирование древовидного ИМ РМ про ведено в среде Matlab с помощью специально разработанного программного комплекса, со стоящего из набора процедур, записанных в виде mфайлов. Достоинством комплекса яв ляется то, что он применим для исследования ИМ с произвольной древовидной КС. Особенность конкретной КС отражается в содержании пускового файла, в котором на ходится информация о структуре КС, массах, моментах инерции, координатах центров масс и других параметрах ИМ. Уравнение (1) с определенными выше мат ричными коэффициентами позволяет рассчи тывать моменты и мощности, развиваемые приводами, необходимые для обеспечения за данных программных движений РМ. Три типо вые схемы движения ИМ РМ приведены на рис. 6. менты которой равны 1; Θ — нулевая матрица. Матрица z, определяющая направление осей связанных систем координат РМ и их взаимное расположение, имеет вид 0 z =( 0 z 0,1 , 0 z 1 , 0 z 2 , 0 z 0, 2 , 0 z 4 , 0 z 5 , 0 z 0, 3 , 0 z 7 , 0 z 8 , 0 z 9 , 0 z 10 , 0 z 0,4 , 0 z 12 , 0 z 13 , 0 z 14 )т . Матрица σ d =diag(σ 1 σ 2 K σ N ) коэффици ентов, определяющих типы сочленений звень ев РМ становится единичной матрицей. Так же определяются: m =(m1 ,m 2 ,... ,m15 )т — матрица масс звеньев ИМ РМ; J C =(J C 1 ,J C 2 ,..., J C 15 )т — блочная матрица тензоров инерции звеньев; 0 d t =diag( 0 t 1т 0 t 2т ,..., 0 t 15т ) — блочная диа гональная матрица векторов, соединяющих на чала соответствующих систем координат звеньевотцов с точками, через которые прохо 2011. ¹ 9 Рис. 6. Схемы движения РМ при исследовании моментов и мощностей в сочленениях ИМ: а — подъем руки вбок; б — сгиб руки в локте; в — маховое движение ноги вперед Во всех этих схемах принимается, что дви жение осуществляется при изменении углов в соответствующих сочленениях по гармони ческому закону. Исследования проводились при различных массах грузов, перемещаемых РМ. Максимальные моменты и мощности, развиваемые приводами, необходимые для обеспечения заданных движений звеньев ис полнительного механизма РМ, приведены в таблице. 55 Таблица Максимальные моменты и мощности, развиваемые приводами РМ при рассматриваемых типовых движениях звеньев Подъем руки вбок (рис. 6, а) Сгиб руки в локте (рис. 6, б) Масса груза, кг M2max, Н·м N2max, Вт M3max, Н·м N3max, Вт M9max, Н·м N9max, Вт 0 10,4 25,3 1,8 2,16 16,8 20,7 2 28,4 69,3 5 6,2 24 29,7 5 55,5 135,2 9,9 12,2 34,9 43 10 100,6 245,2 17,98 22,2 53,12 65,53 15 145,72 355,1 26,1 32,2 71,3 87,98 20 190,83 465,1 34,2 42,2 89,5 110,4 Выводы При разработке математических моделей древовидных ИМ ДШР в качестве биологиче ского прототипа предлагается использовать скелет человека. Предложена математическая модель древо видного ИМ РМ. Моделирование РМ проведе но в среде Matlab с помощью специально раз работанного программного комплекса, позво ляющего исследовать ИМ с произвольной древовидной КС. Рассчитанные при различных внешних на грузках на звенья ИМ РМ требуемые моменты и мощности, развиваемые приводами в степе нях подвижности РМ, могут стать основой для проектирования его системы приводов. 56 Маховое движение ноги вперед (рис. 6, в) Литература 1. Пупков К.А., Ковальчук А.К., Кулаков Б.Б. Использова ние биологических прототипов при построении кинемати ческих схем современных шагающих роботов // Вестник РУДН. Инженерные исследования. М., 2009. № 4. С. 44—54. 2. Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Математи ческое описание кинематики и динамики исполнительных механизмов роботов с древовидной кинематической структурой // Изв. вузов. Машиностроение. М., 2008. № 11. С. 13—25. 3. Ковальчук А.К., Кулаков Д.Б., Семенов С.Е. Блоч номатричные уравнения движения исполнительных меха низмов роботов с древовидной кинематической структурой // Изв. вузов. Машиностроение. М., 2008. № 12. С. 5—21. 4. Humanlike robotics manneguin works up a sweat // Industrial Engineering (USA). 1988. Vol. 20. № 8. 5. Лобачев В.И., Ковальчук А.К. Расчет параметров и ха рактеристик гидропривода автоматического манипулятора // Методические указания к выполнению домашнего задания по курсу «Гидравлические устройства автоматических мани пуляторов». М.: Издво МГТУ им. Н.Э. Баумана, 2001. 21 с. Статья поступила в редакцию 01.09.2011 г. 2011. ¹ 9