Некоторые приложения определенного интеграла
advertisement

Государственное образовательное учреждение
высшего профессионального образования
«Поморский государственный университет
имени М.В. Ломоносова»
И.Н. Бройтигам
Некоторые приложения
определенного интеграла
Часть 1. Теория
Учебно-методическая
разработка
Архангельск
Поморский университет
2009
Печатается по решению редакционно-издательской комиссии матема­
тического
факультета
Поморского
университета
Автор:
И.Н. Бройтигам, кандидат физико-математических наук,
старший преподаватель кафедры математического анализа
ПТУ имени М.В. Ломоносова
Рецензенты:
Б.М. Постников, кандидат физико-математических наук,
доцент, заведующий кафедрой математического анализа
П Г У имени М.В. Ломоносова;
С.А. Токаревская, старший преподаватель кафедры алгеб­
ры и геометрии ПГУ имени М.В. Ломоносова
Учебно-методическая разработка содержит основные теоретиче­
ские аспекты приложения определенных интегралов к решению некото­
рых задач геометрии, физики, экономики и биологии.
Для студентов первого курса математического факультета.
© Поморский университет, 2009
Содержание
1. Введение
2.
1.1. Исторические сведения
5
1.2. Схемы применения определенного интеграла
6
Геометрические приложения определенного интеграла
2.1. Площадь плоской фигуры
2.1.1.
Декартова прямоугольная система координат
2.1.2.
Полярная система координат
2.2. Длина дуги плоской кривой
10
11
2.2.1.
Вычисление длины дуги плоской кривой
11
2.2.2.
Дифференциал дуги
13
2.3. Вычисление объема тела
2.3.1.
14
Вычисление объема тела по известным площадям
параллельных сечений
2.3.2.
2.4.
8
8
Объем тела вращения
Вычисление площади поверхности вращения
14
15
16
3. Применение определенного интеграла в механике и физике
3.1. Нахождение статических моментов и центра тяжести кривой
17
3.2. Нахождение статических моментов и центра тяжести
плоской фигуры
19
3.3. Механическая работа
21
3.4. Работа переменной силы
23
3.5. Давление жидкости на вертикальную пластинку
24
3.6. Масса и центр тяжести неоднородного стержня
25
3.7. Момент инерции
26
4. Интегральное исчисление в экономике
4.1. Количество денег, поступивших в банк за определенный
промежуток времени
27
4.2. Объем продукции, произведенной за определенный
промежуток времени
28
4.3. Определение дисконтированной стоимости
денежного потока
29
4.4.
Производственная функция Кобба - Дугласа
31
4.5.
Кривая Лоренца
32
4.6.
Спрос и предложение
32
5. Интегральное исчисление в биологии
5.1. Численность популяции
39
5.2.
Биомасса популяции
40
5.3.
Средняя длина пролета
41
Рекомендуемая литература
43
1.
Введение
1.1.
Исторические сведения
Интегральное исчисление возникло из задач на определение площадей и
объемов. Эмпирически обнаруженные правила измерения площадей и объе­
мов некоторых простейших фигур были известны еще ученым Древнего Во­
стока. Существенный прогресс в вычисление площадей и объемов различных
фигур внесла древнегреческая наука. Особенно большой вклад был внесен
Архимедом. Он нашел площади многих фигур и объемы значительного чис­
ла тел, основываясь на том, что плоская фигура состоит из бесчисленного
множества прямых отрезков, а геометрическое тело - из бесчисленного коли­
чества параллельных плоских сечений. Систематическое развитие подобные
представления получили значительно позже - лишь в X V I I веке. Пользуясь
такого рода рассуждениями И. Кеплер нашел объемы многих новых тел вра­
щения. Известные в астрономии законы Кеплера фактически также были
получены им с помощью приближенного интегрирования. Кавальери, Торричелли, Ферма, Паскаль и другие ученые X V I I века еще больше приблизи­
лись к современным представлениям об интеграле. Барроу установил связь
между задачей о нахождении площади и задачей о нахождении касательной.
А И. Ньютон и Г. Лейбниц независимо друг от друга в 70-х годах X V I I века
отделили эту связь от частных геометрических задач и создали алгоритмы
дифференциального и интегрального исчислений.
И. Ньютон открыл взаимно обратный характер операций дифференциро­
вания и интегрирования. Он указывал, что все задачи нового анализа сводят­
ся к двум взаимно обратным проблемам, которые могут быть сформулирова­
ны в терминах механики: 1) определение скорости движения в данный момент
времени по известному пути и 2) определение пройденного за данное время
пути по известной скорости движения. "Время"при этом понималось просто
как общий аргумент всех переменных. Вводит он и понятие дифференциала,
которое называет моментом. И. Ньютон намечает программу построения ана­
лиза на основе учения о пределе, не давая однако формального определения
этого понятия, получившего глубокое развитие в математике X I X века.
Г. Лейбниц свел частные и разрозненные приемы вычисления площадей,
проведения касательных и т.д. в единую систему взаимно связанных понятий
анализа, выраженных в обозначениях, позволяющих производить действия с
бесконечно малыми по правилам определенного алгоритма. При этом диффе­
ренциал в основном понимался как бесконечно малая разность двух соседних
значений величины (отсюда его символ d - первая буква латинского слова
differentia (дифференция) - разность, и отношение дифференциалов, кото­
рое соответствует производной), кривая рассматривалась как многоугольник
с бесконечно большим числом бесконечно малых сторон, касательная - как
прямая продолжающая одну из таких сторон. Г. Лейбниц ввел понятие об
интеграле как о сумме бесконечного числа дифференциалов. Таким образом,
главными понятиями анализа Г. Лейбница являлись дифференциал как бес­
конечно малая разность и интеграл как сумма.
Дальнейшее развитие методы интегрирования получили в X V I I I и X I X
веках. В X V I I I веке в работах Л. Эйлера были найдены практически все
известные в настоящее время приемы интегрирования в элементарных функ­
циях. В X I X веке О. Коши аналитически доказал существование интеграла
непрерывной функции и перестроил дифференциальное и интегральное ис­
числение, заложив в качестве их основы понятие предела функции.
Дальнейшие обобщения понятия интеграла связаны с немецким ученым
Б. Риманом и французским ученым А. Лебегом.
1.2.
Схемы применения определенного интеграла
Пусть требуется найти значение какой-либо геометрической или физиче­
ской величины А (площадь фигуры, объем тела, давление жидкости на вер­
тикальную пластину и т. д.), связанной с отрезком [а,Ь] изменения перемен­
ной х. Предполагается, что при разбиении отрезка [а,Ь] какой-либо точкой
с 6 (а, 6) на части [а, с] и [с, Ь] значение величины А, соответствующее всему
отрезку [а, Ь] равно сумме ее значений, соответствующих [а, с] и [с, Ь] .
Для нахождения этой величины можно руководствоваться одной из двух
схем: схема I (или метод интегральных сумм) и схема I I (или метод диффе­
ренциала).
Первая схема базируется на определении определенного интеграла.
1. Отрезок [а, Ь] разбивается произвольным образом на п частей точками
XQ = а < х\ < ... < х
п
= Ь . В соответствии с этим, интересующая величина
А разобьется на п "элементарных слагаемых":
А =
п
i=i
ДА*.
2. Каждое "элементарное слагаемое"представляется в виде произведения
некоторой функции (определяемой из условия задачи), вычисленной в про­
извольной точке соответствующего отрезка на его длину: Д А ; =
f(ci)Axi.
Отметим, что при нахождении приближенного значения допустимы неко­
торые упрощения, а именно, дугу на малом участке можно заменить хордой,
стягивающей ее концы; переменную скорость на малом участке можно при­
ближенно считать постоянной и т. д.
Таким образом, приближенное значение величины А представляется в вип
де интегральной суммы: А « ^ /(с^)Дх;.
i=l
Искомая величина А равна пределу интегральной суммы, т.е.
А =
lim
y]f(a)Axi=
maxAij-tO-'—'
i
i=l
Г
/
/
»
f[x)da
Указанный "метод сумм"основан на представлении интеграла как суммы бес­
конечно большого числа бесконечно малых слагаемых.
Вторая схема представляет собой несколько видоизмененную схему I и на­
зывается "метод дифференциала"или "метод отбрасывания бесконечно ма­
лых высших порядков".
1. На отрезке [а, 6] выбирается произвольное значение х и рассматривается
переменный отрезок [а, х]. На этом отрезке величина А становится функцией
от х -
А(х).
2. Определяется главная часть приращения Д А при изменении х на малую
величину dx = Ах, т. е. находится дифференциал dA функции А(х) : dA =
f(x)dx,
где f(x)
- это функция переменной х, определяемая из условия задачи
(здесь также возможны различные упрощения).
3. Считая, что dA = Д А при Дж —• 0, искомая величина определяется
ь
путем интегрирования величины Д А в пределах от а до 6, т.е. А = J dA.
2.
Геометрические приложения
определенного интеграла
2.1.
Площадь плоской фигуры
2.1.1.
Декартова прямоугольная система координат
Рассмотрим задачу об определении площади криволинейной трапеции A B C D .
Эта фигура ограничена сверху кривой D C , являющейся графиком функции
у = f{x),
где f(x)
- положительная и непрерывная на отрезке [а, Ь] функция,
снизу - отрезком АВ оси ОХ, а с боков - двумя отрезками A D и ВС.
Ау
О
Д
X) О Хм
•
Разобьем отрезок [а, Ь] произвольным образом на п частей точками:
хо = а < х-[ < ...
подотрезков
< Xj < Xi i
+
< ...
< х
п
= b . На каждом из частичных
выберем произвольным образом точку с,- S ( x i , X j i )
+
и построим на отрезках
прямоугольники с высотами f(ci).
щадь каждого такого прямоугольника определяется как
щадь соответствующей ступенчатой фигуры - как
п
Пло­
/ ( c , ) A x , , а пло-
/ ( с ; ) Д х ; . Так как при
i=i
max
t=l,2,...,n
Дж; — ¥ 0 построенная ступенчатая фигура неограниченно приближа-
ется к криволинейной трапеции
A B C D , то площадь криволинейной трапе-
ции S определяется как
п
]Г /{cijAx,.
lim
max A i j - » 0 j _ j
Поскольку f(x)
b
функция, то этот предел существует и равен J
f(x)dx.
- непрерывная
Таким образом, справедлива формула
Ь
S
J
(2.1)
f{x)dx.
Замечание 1. Если криволинейная трапеция C D E F ограничена и снизу,
и сверху графиками функций, уравнения которых у = f\{x) и у = / г ( х ) ,
х 6 [а,6],
y=fM
D
/1
|
It/1
IE
Ч=Цх) i
|А
a
b
x
то, рассматривая ее как разность двух фигур A C D B и A F E B , получим фор­
мулу для площади в виде
б
(2.2)
Замечание 2. Если функция f(x)
< 0 на [а, Ь], то —}{х)
> 0 на этом
отрезке. Поэтому площадь S соответствующей криволинейной трапеции вы­
разится формулой
S = —j
f(x)dx.
Замечание 3. Если график функции f(x)
(2.3)
пересекает ось О Х , то отрезок
[а,Ь] надо разбить на части, в пределах которых функция f(x)
не меняет
знака, и к каждой такой части применить ту из формул, которая ей соответ­
ствует.
Замечание 4. Формула ( 2.1) может быть использована и в том случае,
когда кривая, ограничивающая криволинейную трапецию, задана параметрически, т.е. уравнениями
х = <p(t)
У=
Щ,
to < t < Т, где функции ip(t) и ip(t)
имеют непрерывные производные. Произведя замену в интеграле формулы
( 2.1), получим (в предположении, что х — а при t = to и х = b при t = Т)
т
S = J 1>(t)tp'(t)dt.
(2.4)
«о
2.1.2.
Полярная система координат
Рассмотрим теперь задачу о нахождении площади криволинейного сектора
А О В , ограниченного кривой А В , заданной уравнением р — р(<р), а < <р < /3
и двумя радиус-векторами O A и ОВ. Пусть р = р{ф) - непрерывная функция
на отрезке [а, /3].
Разобьем отрезок [а, /3] произвольным образом на п частей точками
а — ipo < ipi < ... < ipi < tpi i < ... < ip = p и проведем соответствующие
+
n
этим углам радиусы-векторы. Тогда весь криволинейный сектор разобьется
на п элементарных криволинейных секторов. Площадь каждого такого секто­
ра приближенно можно найти как площадь кругового сектора, ограниченного
лучами <р = (pi и <р = (p i
i+
ная точка интервала
определяется как
и дугой окружности р = p(9i), где в{ - произволь­
( ^ V ' i + i ) - Площадь элементарного кругового сектора
^p (9i)A<pi,
2
Д<р; = <р* 1 —
+
а площадь фигуры, явля-
1 "
ющейся объединением этих круговых секторов - как s ^ P ^ O A V i - Так как
i=l
при m a x Atpj —> 0 фигура, состоящая из элементарных круговых секторов
1=1,2,.. .,п
неограниченно приближается к криволинейному сектору, то площадь S криволииейного сектора можно найти как
i
lim
1 ^ > J p ( ^ ) A < ^ i - Этот предел
2
I—I
i f
существует, так как функция p(ip) непрерывна на [а, /3], и равен т;} Р
а
а, следовательно,
Я
{f)dp,
(2.5)
2.2.
Длина дуги плоской кривой
2.2.1.
Вычисление длины дуги плоской кривой
Рассмотрим задачу об определении длины плоской кривой АВ, заданой в
прямоугольной системе координат уравнением у — f(x),
f(x)
где х £ [а, Ь] и
- непрерывно дифференцируемая функция на этом отрезке.
Под длиной дуги А В будем понимать предел, к которому стремиться дли­
на ломаной линии, вписанной в эту дугу, когда число звеньев ломаной неогра­
ниченно возрастает, а длина наибольшего звена ее стремиться к нулю.
Разобьем отрезок [а, 6] произвольным образом на п частей точками:
а = жо < х\ < ... < Х{ < Xi i
+
< ... <х
п
= Ь.
Пусть этому разбиению соответствуют точки А = Мо, М\,..., М
п
на кривой АВ. Проведем хорды MQM\, M I M ,
обозначим соответственно через Д £ ь AL ,
2
П
П
..,AL .
n
M.-L^"A£,i
Ь — Хп
Получим ломанную М М\...
0
М „ длина которой L
n
— В
длины которых
М -\М ,
2
х
равна ]Г)Д1;.
Длину хорды (или звена ломанной) AL{ можно найти по теореме Пифагора из
треугольника с катетами Да;,- и Ayf. AL{ = \/Axf + Ayf, где Да;,- =
Aj/t = f(x i)
-
i+
f{xi).
По теореме Лагранжа о конечном
с* € [xi,x i],
— х,,
приращении функции существует точка
такая, что Ау, = /'(с^)Дх,-. Поэтому АЦ = у/1 + / (с,)Да;*,
/2
i+
а длина всей ломанной MQM\ ... М
П
равна L
= 5 2 \ Д + / (с,)Дг{.
,2
N
!=1
Отметим, что при Д ! ^ —>• 0 также и
у 1 + / (а:)
непрерывна на отрезке [а,Ь], так как, по условию, непрерывна
,2
функция f'(x).
при
Да;* —> 0. Кроме того, функция
Следовательно, существует предел интегральной суммы L ,
n
m a x Ах, —> 0 :
|=1,2,...,П
п
У у/1 +
i
L =
lim
Да* -
max Дх;->0-^—'
(=1,2...-,n
1=1
)
/ y/l +
/
J
f' (x)dx.
2
Таким образом, справедлива формула
L = У
V ! + / (х)<£е.
х
(2.6)
й
а
Замечание 1. Предположим, что кривая АВ задана параметрически
|
*
=
*®
а < t < /?,
А(<р(а), ф(а)),
В(<р(0),
ф(0)).
Пусть функции <p(t) и ф{1) являются непрерывно дифференцируемыми на
ь
L = / y/l + y' (x)dx.
Сделаем
м тогда
" у ч(х)л =
замену переменных в этом интеграле х = x{t),
•>
[а,0].
Формулу (2.6) можно записать как
dx = x'(t)dt
2
Ш
и, следовательно,
/
=
/ v
1
г
+
т2
[Si]
i ,
(*)
d a :
=/
a
vww+wwdt,
таким образом,
L = J VW(t)}
(2.7)
+ [y'(t)] dt.
2
2
а
Замечание 2. Пусть кривая А В задается в полярных координатах
р = р(<р), <р £ [а, /3]. Это задание кривой можно свести к параметрическому
заданию
х = p{ip) cos(i^)
a <f
< p.
У = рЫ sin(<p),
Тогда из формулы (2.7) получим, что
/3
L = / \/рШ+Шр1?<Ьр2.2.2.
Дифференциал дуги
{
х = <^э(*)
(2-8)
a <t
< {3. Пусть
функции <p(t),rl)(t) - непрерывно дифференцируемы на [а,/?]. Выберем неко­
торую произвольную точку М € А В . Ей соответствует значение параметра t.
Длину переменной дуги AM обозначим L{t) и согласно формуле (2.7)
t
L{t)
= J V v ' ( r ) + ф' (т)с1т.
2
2
а
Так как подинтегральная функция непрерывна, то L(t), как интеграл с пе­
ременным верхним пределом, является дифференцируемой функцией и
L'(t)
Таким образом, [L'(t)dt]
2
=
= [p'(t)dt]
^ЩТфЩ.
2
dL
2
+ [i[/(t)dt], а, следовательно,
= dip + #
2
2
(2.9)
Замечание. Все сказанное ранее для плоских кривых распространяется
и на пространственные кривые:
(
х = ip(t)
у = ф(Ь)
z =
a<t<p.
9(t),
В частности, если функции ip(t),tp(t),
g{t) непрерывно дифференцируемые
на [а, Ь], то
Р
а
2.3.
Вычисление объема тела
2.3.1.
Вычисление объема тела по известным площадям
параллельных сечений
Рассмотрим задачу об определении объема V тела, в случае, когда извест­
ны площади сечений этого тела плоскостями, перпендикулярными некоторой
оси, например, оси ОХ : S = S(x),
х е [а, Ь].
Применим схему I I (метод дифференциала).
Через произвольную точку х £ [а, Ь] проведем плоскость Р, перпендикуляр­
ную оси ОХ. Обозначим через S(x) площадь сечения тела этой плоскостью,
S(x)
будем считать известной и непрерывной на [а, Ь] функцией. Через V(x)
обозначим объем части тела, лежащего левее плоскости Р.
Определим дифференциал dV функции V(x). Он представляет собой "эле­
ментарный слой"тела, заключенный между параллельными плоскостями, пе­
ресекающими ось ОХ в точках х и х+Ах,
который приближенно может быть
принят за цилиндр с основанием S(x) и высотой dx. Поэтому дифференциал
объема dV =
S(x)dx.
Искомую величину V находим путем интегрирования dV в пределах от а
до 6:
/3
(2.10)
2.3.2.
Объем тела вращения
Рассмотрим задачу об определении объема V тела, полученного вращени­
ем криволинейной трапеции относительно некоторой оси.
Пусть вокруг оси ОХ вращается криволинейная трапеция, ограниченная
графиком непрерывной функции у — f(x),
и х — b (f(x)
отрезком [а,Ь] и прямыми х = а
> 0 на [а, Ь]).
Полученная от вращения криволинейной трапеции фигура называется те­
лом вращения. Сечение этого тела плоскостью, перпендикулярной оси ОХ
( проведенной через произвольную точку
у = f(x).
S(x)
оси ОХ),
есть круг с радиусом
Следовательно, площадь этого сечения определяется по формуле
— тху . Применяя формулу (2.10) объема тела по площади параллельных
2
сечений, получаем
ъ
Vox=*J
V dx.
2
(2.11)
а
Если криволинейная трапеция ограничена графиком непрерывной функ­
ции х = д(у) и прямыми х = 0, у = cviy — d (д(у) > 0 на [с, d]), то объем тела,
образованного вращением этой трапеции вокруг оси OY, но аналогии с (2.11)
равен
VQY
2.4.
- ж
(2.12)
х dy.
Вычисление площади поверхности вращения
Рассмотрим задачу об определении площади S поверхности, полученной
вращением кривой АВ относительно оси ОХ.
Пусть кривая А В является графиком функции у = f(x)
на этом отрезке, и, кроме того, сама функция f(x)
на [а, Ь], / ( ж ) > О
и ее производная
f'(x)
непрерывны на этом отрезке.
Применим схему I I (метод дифференциала).
Через произвольную точку х € [а, Ь] проведем плоскость V, перпендику­
лярную оси ОХ. Плоскость V пересекает поверхность вращения по окруж­
ности с радиусом f(x).
Величина S поверхности части фигуры вращения,
лежащей левее плоскости, является функцией от х, т. е. s =
s(x).
Зададим аргументу х приращение Да; = dx, так, что х + Ах 6 [а, 6]. Через
точку x+dx также проведем плоскость, перпендикулярную оси ОХ. Функция
s(x)
получит приращение ds, изображенного на рисунке в виде "пояска".
Найдем дифференциал площади ds, заменяя образованную между сечени­
ями фигуру усеченным конусом, образующая которого равна dl, а радиу­
сы оснований равны у и у + dy. Площадь его боковой поверхности равна
ds = ir(y + у + dy) • dl = 2-nydl + irdydl. Отбрасывая произведение dldy как
бесконечно малую более высокого порядка, чем dl, получаем ds = 2irydl
= 27и/у 1 +
/
y dx.
a
=
Интегрируя полученное равенство в пределах от а до Ь , получаем
ъ
S
o
= 2тг j
x
(2.13)
ууД + у^йх.
а
Замечание 1. Если кривая А В задана параметрическими уравнениями
х = ip(t)
°- < t < /3, где (p(t) и ip(t) - непрерывно дифференцируемые
функции на данном отрезке, то формула для площади поверхности вращения
принимает вид
Sox = 2тг j
iP(tW(<P'(t))
+ W(t)) dt.
2
2
(2.14)
а
Замечание 2. Если кривая А В задана в полярных координатах уравне­
нием р = р(р), ifi 6 [а, /3], где p(ifi) - непрерывно дифференцируемая функция
на [а,/?], то формула для площади поверхности вращения принимает вид
Sox = 2тг j
3.
р(<р) еш{<р) у/Ш) +М<Р)) <Ьр2
2
(2- )
15
Применение определенного интеграла
в механике и физике
3.1.
Нахождение статических моментов
и центра тяжести кривой
Статическим момент М материальной точки массы т относительно неко­
торой оси будем называть произведение массы m на расстояние d точки до
оси.
В системе п материальных точек с массами т\, т г , . . . , т „ , лежащих в
одной плоскости с осью, соответственно, на расстояниях d\,d%,...,dn
от оси,
п
статический момент выражается суммой М = ^ ? т ц е ^ . При этом расстояние
t=l
точек, лежащих по одну сторону от оси, берутсясоднаком плюс, а расстояние
точек по другую сторону - со знаком минус.
Определим статический момент, если массы не сосредоточены в отдельных
точках, а расположены сплошным образом, заполняя некоторую кривую.
Предположим, что кривая однородна и ее линейная плотность р =
p(s)
(*€[0,5]).
1
с
(
У
\
tr\f
I
0
Выберем произвольный элемент ds кривой. Примем его приближенно за ма­
териальную точку, лежащую на расстоянии у от оси ОХ, тогда для его стати­
ческого момента получим выражение dM = yp(s)ds.
Интегрируя по дуге s,
x
получим
S
Мох = J yp(s)ds.
(3.1)
о
Аналогично выражается и статический момент относительно оси OY
s
М о г = J xp(s)ds.
(3.2)
о
Статические моменты Мох и М о у кривой позволяют установить положе­
ние ее центра тяжести С(хс, ус) - Точка С обладает тем свойством, что если в
ней сосредоточить всю " м а с с у " т кривой, то статический момент этой массы
относительно любой оси равен моменту всей кривой относительно этой оси, в
частности, если рассмотреть моменты кривой относительно осей координат,
то
тх
с
- М у,
0
тус -
М,
ох
а отсюда
S
S
Jxp(s)ds
xc = — / xp(s)ds
о
s
= ^
,
y
= —
c
/ p(s)ds
о
Jyp(s)ds
yp(s)ds
о
= ^
f
о
.
(3.3)
p(s)ds
В частности, если кривая однородна, т.е. р = const, то
s
J xds
xc =
s
J
,
УС = -—£
yp(s)ds
.
(3.4)
где L - длина кривой.
Из формулы для ординаты ус центра тяжести получаем геометрическое
s
s
следствие: yc-L = J yds, откуда 2-к-ус-Ь = 2тг- J yds, но правая часть этого
о
о
равенства есть площадь S поверхности, полученной от вращения кривой А В ,
в левой же части равенства 2п • ус обозначает длину окружности, описанной
центром тяжести кривой при вращении ее около оси х.
Таким образом, справедлива
Первая теорема Гульдена. Площадь поверхности
тела,
полученного
при вращении плоской кривой вокруг некоторой не пересекающей
расположенной
в той же плоскости, равна длине окружности,
центром тяжести кривой, умноженной
3.2.
ее оси,
описанной
на длину этой кривой.
Нахождение статических моментов
и центра тяжести плоской фигуры
Рассмотрим плоскую фигуру АА'В'В,
которая задана уравнением у = f(x).
ограниченную сверху кривой А В ,
Предположим, что по этой фигуре
равномерно распределены массы, так что их поверхностная плотность р по­
стоянна.
Чтобы определить статические моменты Мох, Мог этой фигуры относитель­
но осей координат, выберем произвольный элемент фигуры в виде бесконечно
узкой вертикальной полоски dx. Приняв эту полоску приближенно за прямо­
угольник, получаем, что ее масса равна ydx. Далее, предположим, что вся
масса полоски сосредоточена в ее центре тяжести (т.е. в центре прямоуголь­
ника, что не изменяет величины статических моментов). Учитывая, что по­
лученная материальная точка отстоит от оси ОХ на расстоянии ^у, от оси
OY на расстоянии x+^dx,
и, замечая, что величина ^ydx
2
есть бесконечно
малая более высокого порядка чем dx, получим формулы
dMox
1 ,
= ^2/ dx,
dMoY
=
xydx,
а, следовательно,
ъ
ь
Мох
По этим статическим моментам несложно определит координаты [хс, Ус] Цен­
тра тяжести фигуры. Если через S обозначить площадь фигуры, то по ос­
новному свойству центра тяжести
ь
Sx
c
ь
= MQY = f xydx,
Sy
c
= MQX = \ f
y dx,
2
откуда
ь
XC =
I/ '
xydx
ь
yc
=
^s j
y 2 d x
'
(3.6)
В данном случае из формулы для ординаты ус центра тяжести получаем
ъ
геометрическое следствие 2-irycS = тг J y dx. Правая часть этого равенства
а
2
выражает объем V тела, полученного от вращения плоской фигуры
АА'В'В
вокруг оси ОХ, левая же часть выражает произведение площади этой фигу­
ры на длину окружности, описанной центром тяжести фигуры.
Таким образом, справедлива
Вторая теорема Гульдена. Объем тела, полученного
плоской фигуры вокруг некоторой не пересекающей
ее оси,
при вращении
расположенной
в той же плоскости, равен плошади этой трапеции, умноженной
ну окружности,
описанной центром тяжести
на дли­
плоской фигуры при этом
вращении.
3.3.
Механическая работа
Пусть точка движется по некоторой кривой А В . Из механики известно,
что в случае, когда сила, приложенная к точке М, сохраняет постоянную ве­
личину F и постоянный угол с направлением перемещения точки, то работа
А этой силы по перемещении точки М выражается формулой F • cos(F, s) • s,
где (F, s) обозначает угол между направлениями силы F и перемещения s
точки. Произведение F = Fcos(F,s)
a
представляет собой проекцию силы F
на перемещение s. Вводя эту проекцию, можно выражение для работы пред­
ставить в виде А = F s. Если направление силы совпадает с направлением
s
перемещения точки, то А = Fs; в случае же, когда оба направления прямо
противоположны, А = —Fs.
Величина силы F и угол (F, s) могут изменятся. При непрерывном измене­
нии хоть одной из этих величин для выражения величины работы требуется
прибегнуть к определенному интегралу.
Пусть путь s, проходимый точкой, будет независимой переменной. При
этом предположим, что начальному положению А точки М соответствует
значение s = SQ, а конечному В - значение s = S.
Каждому значению s в промежутке (s , S) отвечает определенное положение
0
движущейся точки, а также определенные значения величин F и cos(F, s),
которые, таким образом, можно рассматривать как функции от s.
Выберем точку М в каком-нибудь ее положении, определяемом значением
s пути и найдем приближенное выражение для элемента работы, соответству­
ющего приращению ds пути, от s до s + ds, при котором точка М перейдет
в точку М'. В положении М на точку действует определенная сила F под
определенным углом ( F , s). Так как изменение этих величин при переходе
точки из М в М' - при малом dx - также мало, этим изменением можно пре­
небречь и, считая величину силы F и угол (F,s) приближенно постоянными,
получаем dA — F cos(F, s)ds, таким образом, вся работа А определяется
s
А = j
Fcos(F,s)ds.
(3.7)
so
При (F, s) = I величина работы обращается в нуль, таким образом, си­
ла, перпендикулярная к направлению перемещения, механической работы не
производит.
Если действующую на точку силу F разложить на две составляющие по касательной к пути, т.е. по направлению перемещения, и по нормали к
нему, то, работу будет производить лишь касательная составляющая F
s
F c o s ( F , s), т.е.
S
А =
jF ds.
s
so
=
Предположим, что F есть равнодействующая всех приложенных к точке
сил, тогда, по закону движения Ньютона, касательная составляющая F рав­
s
на произведению массы га точки на ее ускорение а , и выражение для работы
А можно написать в виде:
S
А = j
mads
so
Так как а
и v = ^ | , то А = J mv^ds
= | m T — |mTo, где через То и
«о
Т обозначены величины скорости, в конечной и начальной точках пути.
3.4.
2
Работа переменной силы
Пусть материальная точка перемещается под действием силы F, направ­
ленной вдоль оси ОХ
и имеющей переменную величину, зависящую от х.
Определим значение работы А, совершаемой силой F по перемещению мате­
риальной точки вдоль оси ОХ из точки х — а в точку х = Ъ (а < Ь). Будем
предполагать, что функция F{x)
является непрерывной на отрезке [а,Ь].
Разобьем отрезок [а, Ь] произвольным образом на п частей точками
а = XQ < Х\ < ... < Xi < Xi i
+
< ... < х
п
— Ь. Выберем на каждом частич­
ном отрезке [х*, Х{+\] произвольным образом точку с*. Сила, действующая на
материальную точку на отрезке [ж;, £i+i]> изменяется от точки к точке. Так
как F(x)
непрерывная функция, то, если длина отрезка мала, значение си­
лы в точках отрезка [х», Xj+i] мало отличается от ее значения в любой точке
Cj £ [ X J , X J I ] . Поэтому работу At, совершаемую силой F на [ x i , x i ] , можно
+
i +
считать приближенно равной работе, совершаемой на том же отрезке посто­
янной силой F ( C J ) , т.е. А{ « F(c,-)Ax;,
Рассуждая аналогично для каждого отрезка разбиения, получаем приблип
женное значение работы А силы F на всем отрезке: А « ^ F ( C J ) A X * .
1=1
С другой стороны, сумма в правой части равенства является интегральной
суммой для функции F(x).
предел этой суммы при
Так как функция F ( x ) непрерывна на [а,Ь], то
max
1=1,2,. ..,71
Дх* —у О существует и равен определенному
интегралу от функции F(x)
по отрезку [а, Ъ]. Таким образом,
ь
(3.8)
А = J F(x)dx.
а
3.5.
Давление жидкости на вертикальную пластинку
По закону Паскаля давление жидкости на горизонтальную пластину рав­
но весу столба этой жидкости, имеющего основанием пластинку, а высотой глубину ее погружения от свободной поверхности жидкости, т. е. Р =
yySh,
где д - ускорение свободного падения, 7 - плотность жидкости, S - площадь
пластинки, h - глубина ее погружения. Однако, по этой формуле нельзя ис­
кать давление жидкости на вертикально погруженную пластинку, так как ее
разные точки лежат на разных глубинах.
Рассмотрим эту ситуацию. Пусть в жидкость погружена вертикально пла­
стина, ограниченная линиями х — а, х = Ь, у\ = Л (ж) и у2 = /2(ж).
0
.У
а
::^\У2 = / г ( х )
х
x+dx
b
yi=/i(z)\S
X
Для нахождения давления
жидкости на эту пластину применим схему I I
(метод дифференциала).
1. Пусть часть искомой величины Р есть функция от х: р = р(х),
т.е.
р = р(х) - это давление на часть пластины, соответствующее отрезку [а, Ь]
значений переменной х ( х G [а, b], р(а) = 0,p(b) =
Р).
2. Зададим аргументу приращение Дж = dx. Функция р(х) получит при­
ращение Д р (на рисунке - "полоска-слой"толщины dx). Найдем дифференци­
ал dp этой функции. Ввиду малости dx будем приближенно считать полоску
прямоугольником, все точки которого находятся на одной глубине ж, т. е. эта
пластинка - горизонтальная. Тогда по закону Паскаля dp = 57(2/2 — yi)% ' dx.
3. Интегрируя полученное равенство в пределах от ж = а до ж = Ь, получим
ь
ь
Р = 91 [{№ - Vi)xdx
3.6.
или
Р = ду J(/2(2:)
(3.9)
- fi(x))xdx.
Масса и центр тяжести неоднородного стержня
Рассмотрим задачу об определении массы и центра тяжести неоднородного
стержня, расположенного на отрезке [о, 6] оси ОХ.
Пусть р(х) - линейная
плотность стержня - является непрерывной функцией на [а, Ь].
Разобьем отрезок [а, Ь] произвольным образом на п частей точками
а — хо < х\ < ... < Х{ < Xi+i < ... < х„ = Ь. Выберем на каждом частичном
п
отрезке [z;, Xj+i] точку Cj и составим сумму Yl p{ci)Ax{. Так как каждое слаi=i
гаемое этой суммы представляет собой приближенное значение массы части
стержня на отрезке [2^,2^+1], то указанную сумму примем за приближен­
ное значение массы всего стержня. Определим массу М всего стержня как
п
предел сумм У] /з(,)Дж; при max {Дж,} —> 0. Отметим, что этот предел
l
i=l,2,...,n
существует в силу непрерывности функции р(ж), следовательно,
i =
М
(3.10)
j p(x)dx.
Для определения центра тяжести неоднородного стержня воспользуемся фор­
мулой для координат центра тяжести системы {тп{(х{)} материальных точек,
имеющих массы тп{ и расположенных в точках ж* оси ОХ.
Координата хс
центра тяжести системы { т ; ( ж г ) } может быть найдена по формуле
J^TUiXi
хс =
Ч
•
(З.П)
1=1
Далее, разобьем отрезок [а, Ь] произвольным образом на п частей точками
а = Хо < xi < ... < Х{ < Xi+i < . . . < х
п
— Ь и вычислим массу т * части
стержня, расположенной на отрезке [ a ; i , X i i ] . По формуле (3.10)
+
i+i
г; = j
p{x)dx.
i
Масса Щ{ сосредоточена в точке с* отрезка [х{,
а неоднородный стер­
жень можно рассматривать как систему материальных точек с массами ттг,-,
п
расположенными в точках с; отрезка [а, Ь]. Поскольку £ m , = М, то по формуле (3.11) приближенное выражение для координаты хс центра тяжести
неоднородного стержня
п
52cip(a)Axi
»=i
х с
=
м
•
Выражение, стоящее в числителе правой части соотношения представляет со­
бой интегральную сумму для функции хр(х) на отрезке [а, Ь], которая непре­
рывна на этом отрезке. Таким образом, учитывая формулу (3.10), координата
хс центра тяжести неоднородного стержня определяется следующим образом
ь
j
xp(x)dx
хс = V •
/ p{x)dx
(3-12)
а
3.7.
Момент инерции
При вращательном движении тела инерция характеризуется величиной,
называемой моментом инерции. Момент инерции J материальной точки с
массой тп, находящейся на расстоянии г от оси вращения численно равняется
J =
mr .
2
Для вычисления момента инерции какого-либо тела его разделяют на множе­
ство достаточно малых по массе элементов, каждый из которых может быть
приближенно принят за материальную точку. Для каждого из этих элемен­
тов вычисляют произведение массы т на квадрат расстояния г центра масс
2
элемента от центра вращения и затем суммируют. Тогда момент инерции тела
равен
п
п
t=l
1=1
Моменты инерции однородных тел правильной геометрической формы вы­
числяются с помощью интеграла. Если такое тело разбить на неограниченное
количество элементов с достаточно малой массой dm, находящихся на раз­
личных расстояниях г от оси вращения, то момент инерции тела массой М
будет выражаться следующим образом:
(3.13)
J = J г dm.
2
At
4.
Интегральное исчисление в экономике
В курсе микроэкономики часто рассматривают так называемые предель­
ные величины, т.е. для данной величины, представляемой некоторой функ­
цией у = / ( ж ) , рассматривают ее производную f'(x).
Например, если да­
на функция издержек С в зависимости от объема q выпускаемого товара
С = С(д), то предельные издержки будут задаваться производной этой функ­
ции МС = C'(q).
Ее экономический смысл - это издержки на производство
дополнительной единицы выпускаемого товара. Поэтому часто приходится
находить функцию издержек по данной функции предельных издержек.
4.1.
Количество денег, поступивших в банк
за определенный промежуток времени
Пусть у = f(t) описывает количество денег поступающих в банк в каждый
момент времени t. Требуется определить общее количество денег U, посту­
пивших в банк за промежуток времени [О, Т ] .
Если / ( £ ) = const, то количество денег U , поступившее в банк за проме­
жуток времени [0,Т], находится по формуле U = / ( с ) ( Т — 0) = / ( с ) Т , где с
- произвольное значение из отрезка [0, Т].
т
Если в каждый момент времени за промежуток времени [0, -g] в банк
поступает f{c{)
денежных единиц, а в каждый момент времени в промежутке
Т
[•g, Т ] - / ( с г ) денежных единиц, то общее количество денег, поступившее за
Т
Т
промежуток времени [О, Т ] , подсчитывается по формуле U — / ( c i ) - ^ Ч - / ^ ) ^ " .
Пусть f(t) - произвольная кусочно-непрерывная функция на отрезке [О, Т].
-
Разобьем отрезок [О, Т) на промежутки времени точками 0 = to < t\ < ...
<t
<
= T.
n
Количество денег AUi, поступивших в банк за промежуток времени [ti, ti {\
+
приближенно может быть вычислено по формуле АЩ и / ( с * ) Д ^ , где
d € [U, U+i], AU = U+\ - U, г = 1 , 2 , . . . , п . Тогда (7 = £ AUi * Е / ( ч ) Д*<.
При стремлении
t=l
г=1
max Д ^ к нулю каждое из использованных приблиt=l,2,...,n
женных равенств становится все более точным, поэтому U =
lim ^
f(ci)Ati.
max Mi j—i
Учитывая определение определенного интеграла, получаем
г
U = У /(*)А.
(4.1)
о
Поскольку / ( < ) > 0, то общее количество денег, поступивших в банк за
промежуток времени [О, Т] численно равно площади фигуры под графиком
функции
4.2.
f(t).
Объем продукции, произведенной
за определенный промежуток времени
Пусть функция z = f(t)
описывает изменение производительности некото­
рого производства с течением времени. Найдем объем продукции Q, произве­
денной за промежуток времени [О, Т]. Отметим, что если производительность
не изменяется с течение времени (f(t)
дукции AQ,
- постоянная функция), то объем про­
произведенной за некоторый промежуток времени [t,t +
задается формулой AQ = f(t)At.
At],
В общем случае справедливо приближен-
ное равенство AQ и / ( с ) Д £ , где с € [t,t + At], которое оказывается тем
более точным, чем меньше At.
Разобъем отрезок [О, Г ] на промежутки времени точками 0 = to < t\ <
... < t
n
= Т. Для величины объема продукции AQi, произведенной за про­
межуток времени [£t,£»+i], имеем AQi ю f{ci)AU,
ка отрезка [£;,£j i], AU = t i
+
— t,-, г — 1 , 2 , . . . , п . Тогда
i+
п
Y^, /(сг)Д<«- При стремлении
j=l
где Cj - произвольная точQ «
п
J2 AQi
t=i
=
max Ati к нулю каждое из использованных
»=1,2,...,п
приближенных равенств становится все более точным, поэтому
л
Q =
lim
f(ci)AU.
Учитывая определение определенного интеграла,
max Ati->0
получаем
г
Q = j
f(t)dt.
(4.2)
о
Поскольку / ( f ) > 0, то объем продукции, произведенной за промежуток вре­
мени [0,7*], численно равен площади фигуры под графиком функции
f(t),
описывающей изменение производительности труда с течением времени, на
промежутке [0, Т ] .
4.3.
Определение дисконтированной стоимости
денежного потока
При определении экономической эффективности капитальных вложений
возникает задача дисконтирования: определение начальной суммы Ао через
время t по ее конечной величине A{t) при процентной ставке р.
Пусть A(t) - конечная сумма, полученная за t лет, a AQ - начальная сумма.
Если проценты простые, то в конце года t сумма A(t) в банке составит
A(t)=Ao(l+pt).
А, соответственно, дисконтированная сумма
А -
т
При начислении сложных процентов, конечная сумма вычисляется как
A(t)
= Ao(l+pY,te
N,
а дисконтированная сумма
При непрерывном начислении процентов, конечная и дисконтированная сум­
мы вычисляются по следующим формулам:
A(t)
t 6 (0, + о о ) ;
= Ae ,
pt
0
А = Л(<)е '*.
0
-
Предположим, далее, что деньги вкладываются в банк не разово, в на­
чальный момент времени t = 0, а постоянно и образуют денежный поток,
который выражается непрерывной функцией Ao(t). Тогда, согласно формуле
(4.1), общая сумма Ud, вложенная в банк за период времени [О, Г ] , представ­
ляет определенный интеграл
т
т
U = jAa(t)dt=
(4.3)
J A{t)e- dt.
pt
d
о
о
Здесь A(t) - ежегодно поступающий доход или скорость изменения денежного
потока.
Величина Ud называется дисконтированной
стоимостью
денежного
по­
тока за период времени [О, Г ] .
Далее, рассмотрим некоторую модель экономического роста, предложен­
ную Е.Д. Домаром. Сформулируем основные допущения этой модели.
1. Всякое изменение величины скорости денежного потока A(t) влияет как
на совокупный спрос, так и на изменение объема производства.
2. Скорость изменения величины спроса Y(t) пропорциональна производ­
ной скорости денежного потока с коэффициентом пропорциональности
К —~ где s - предельная величина накопления. Это предположение можно
}
записать в виде уравнения
dt
s dt
'
3. Экономический потенциал к (т.е. величина стоимости товаров, которые
к
можно произвести) пропорционален объему оборотных средств К с коэффи­
циентом пропорциональности р, к = рК. Дифференцируя по t, получим
ъ =
р
и -
( 4
-
5 )
В модели Домара предполагается, что весь экономический потенциал полно­
стью используется, иными словами, Y = к, а следовательно,
dY
dk
Подставляя (4.4) и (4.5) в (4.6), имеем
dA
— =psdt.
Чтобы найти функцию A(t)
(4.7)
из уравнения (4.7) проинтегрируем обе части
уравнения по t от 0 до t. Получим
1п|Л(£)| = 1п|Л(0)| + pst. Потенцируя
последнее равенство, получим окончательное выражение для A(t):
— Л ( 0 ) е , где Л(0) — AQ - это скорость денежного потока в начальный
A(t)
р9(
момент времени.
Таким образом, для того чтобы поддерживать равновесие между объемом
производимых благ и совокупным спросом на них, скорость денежного потока
должна расти с экспоненциальной скоростью согласно формуле
A(t)
4.4.
=
Ae .
pst
0
Производственная функция Кобба - Дугласа
Производственная функция Кобба - Дугласа - это зависимость объема про­
изводства q, от создающих его труда L и капитала К.
Впервые производственная функция была рассчитана в 1920-е годы для
обрабатывающей промышленности С Ш А , в виде равенства
ln(<j) = l n ( l . O l ) + 0 . 7 3 l n ( L ) + 0 . 2 7 Ы(К)
Общий вид функции:
9 =
A-L K ' ,
x
l x
где А - технологический коэффициент.
Если в функции Кобба - Дугласа считать, что затраты труда есть линейная
зависимость от времени, а затраты капитала неизменны, то она примет вид
q{t) = (at + /3)е . Тогда объем выпускаемой продукции за Т лет составит:
7(
г
Q = J{at + 0)e*dt.
(4.8)
4.5.
Кривая Лоренца
Кривая Лоренца - это кривая, которая показывает, какую часть совокупно­
го денежного дохода страны получает каждая доля низкодоходных и высоко­
доходных семей, то есть отражает в процентах распределение дохода между
семьями с разным достатком.
Кривая Лоренса наглядно показывает, насколько фактическое распределение
доходов между разными семьями отличается от равномерного распределения.
Исследуя кривую Лоренца (кривую ОВА)
можно оценить степень нера­
венства в распределении доходов населения. При равномерном распределе­
нии доходов кривая Лоренца вырождается в прямую - биссектрису OA. Пло­
щадь фигуры ОАВ между биссектрисой OA и кривой Лоренца, отнесенная
к площади треугольника О АС (коэффициент Джини), характеризует сте­
пень неравенства в распределении доходов населения. При коэффициенте,
равном 0 - полное равенство в доходах населения, при значении коэффици­
ента менее 0,3 - слабое неравенство, при 0,3 - 0,7 - значительное, при 0,7 - 1 сильное.
4.6.
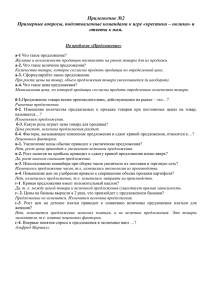
Спрос и предложение
Спрос на данный товар (D-demand) - это сложившаяся на определенный
момент времени зависимость между ценой товара и объемом его покупки.
Спрос на отдельный товар графически изображается в виде кривой с отри­
цательным наклоном, отражающей взаимосвязь между ценой Р (price) еди­
ницы этого товара и количеством товара Q (quantity), которое потребители
готовы купить при каждой заданной цене. Отрицательный наклон кривой
спроса имеет очевидное объяснение: чем дороже товар, тем меньше количе­
ство товара, которое покупатели готовы купить, и наоборот.
1
\
н
D - кривая спроса
?
Аналогично определяется и другое ключевое понятие экономической теории
- предложение (S-supply) товара: сложившаяся на определенный момент вре­
мени зависимость между ценой товара и количеством товара, предлагаемого
к продаже. Предложение отдельного товара изображается графически в виде
кривой с положительным наклоном, отражающей взаимосвязь между ценой
единицы этого товара Р и количеством товара Q, которое потребители готовы
продать при каждой цене.
Q
Введем еще одно понятие, играющее большую роль в моделировании эконо­
мических процессов - рыночное равновесие (equilibrium). Состояние равно­
весия характеризуют такие цена и количество, при которых объем спроса
совпадает с величиной предложения. Графически рыночное равновесие изоб­
ражается точкой пересечения кривых спроса и предложения, E*(Q*;P*)
точка равновесия.
-
В дальнейшем для удобства анализа будем рассматривать не зависимость
Q — f(P),
а обратные функции спроса и предложения, характеризующие
зависимость Р = f(Q).
са Р =
f(Q).
Изобразим на графике обратную функцию спро­
Допустим, что рыночное равновесие установилось в точке
E*(Q*;P<)
Если покупатель приобретает товар в количестве Q* по равновесной цене
Р*, то очевидно, что общие расходы на покупку такого товара составят
P*Q*,
что равно площади заштрихованной фигуры А
Но, предположим теперь, что товар в количестве Q* продается продавцами не
сразу, а поступает на рынок небольшими партиями AQ. Именно такое допу­
щение вместе с предположением о непрерывности функции спроса и предло­
жения является основным при выводе формулы для расчета потребительско­
го излишка. Отметим, что данное допущение вполне оправдано, потому что
такая схема реализации товара довольно распространена на практике и вы­
текает из цели продавца поддерживать цену на товар как можно выше. Тогда
получим, что сначала предлагается товар в количестве Q i = AQ, который
продается по цене Р\ = f(Qi).
Так как по предположению величина AQ ма­
ла, то можно считать, что вся первая партия товара реализуется по цене Р\,
при этом затраты покупателя на покупку такого количества товара составят
PiAQ,
что соответствует площади заштрихованного прямоугольника Si.
Далее, на рынок поступает вторая партия товара в том же количестве, ко­
торая продается по цене Р2 = / ( ( З г ) . где Q2 = Qi + AQ - общее количество
реализованной продукции, а затраты покупателя на покупку второй пар­
тии составят P2AQ,
что соответствует площади прямоугольника 5г- Продол­
жим процесс до тех пор, пока не дойдем до равновесного количества товара
Q* — Qn- Тогда становится ясно, какой должна быть величина AQ для того,
О*
чтобы процесс продажи товара закончился в точке Q*: AQ =~те получим, что цена n-й партии товара Р
п
— f{Q )
n
= f(Q*)
В результа­
= P*t а затра­
ты потребителей на покупку этой последней партии товара составят
P AQ,
n
или площадь прямоугольника S . Таким образом, получаем, что суммарные
n
затраты потребителей при покупке товара мелкими партиями AQ равны:
п
п
^2 PiAQ =
f(Qi)AQ.
Так как величина AQ очень мала, а функция f(Q)
t=i
1=1
п
непрерывна, то
f(Qi)AQ
приблизительно равна площади фигуры В,
1=1
которая, при малых приращениях аргумента AQ, равна определенному ин­
тегралу от обратной функции спроса при изменении аргумента от 0 до Q*,
т. е. в итоге получим, что
О"
(4.9)
о
Так как каждая точка на кривой спроса
= f(Qi)
(г = 1 , 2 , . . . , к) показы­
вает, какую сумму потребитель готов заплатить за покупку дополнительной
единицы продукта, получаем, что площадь фигуры В соответствует общей
денежной сумме, которую потребитель готов потратить на покупку Q* еди­
ниц товара. Разность между площадью фигуры В и площадью прямоуголь­
ника А есть потребительский излишек при покупке данного товара - превы­
шение общей стоимости, которую потребитель готов уплатить за все единицы
товара, над его реальными расходами на их приобретение.
О
Q*
Q
Таким образом, потребительский излишек можно посчитать по следующей
формуле
ti­
es
- P*Q*.
= J f{Q)dQ
(4.10)
о
Аналогично излишку потребителя определяется и излишек производителя
(PS-producer surplus). Отметим, что излишек производителя представляет
собой разницу между той денежной суммой, за которую он был бы готов
продать Q* единиц товара, и той суммой, которую он реально получает при
продаже этого количества товара. Графически он может быть представлен
площадью фигуры, ограниченной кривой предложения, осью цен и прямой,
параллельной оси абсцисс, проходящей через точку рыночного равновесия.
Очевидно, что
Q'
PS = P'Q" - J f{Q)dQ.
(4.11)
о
Далее, рассмотрим вопрос, как и на сколько изменится излишек потреби­
теля в результате проведения того или иного мероприятия государственной
политики, оказывающей влияние на равновесие на рынке, в частности, при
установлении налогов, введении субсидий и т. п.
Допустим, что товар облагается налогом в размере t на единицу това­
ра (такой налог экономисты называют потоварным налогом), тогда его цена
увеличится с Pi до Рг [Рг — Р\ + t).
Влияние данного налога на благосостояние потребителя характеризует си­
туация, представленная на рисунке
Таким образом, получаем, что A C S - уменьшение благосостояния потреби­
теля, оцениваемое с помощью потребительского излишка, есть разница пло­
щадей двух фигур, соответствующих C S \ и C S , и по форме напоминает
2
трапецию, площадь которой, равна сумме площадей фигур Т\ и Т , т. е.
2
A C S
= Sy, + S T , где S ^ измеряет потери излишка потребителя, вызван­
2
ные увеличением цены единицы товара на размер налога и равна tQ , а 5^
2
измеряет потери благосостояния потребителя, связанные с уменьшением ко­
личества потребляемого товара (Q
< Qi), и равна
2
/
f(Q)dQ-AQP .
1
Таким образом, для случая введения потоварного налога в размере t имеем
<?!
ACS
= tQ + j
2
f{Q)dQ
- AQ • Pi D
v
В общем случае результат изменения потребительского излишка вследствие
увеличения цены на товар может быть записан, например, в следующем виде
0i
A C S ш j
f(Q)dQ
+ QP
2
2
- QiPv
(4.13)
09
Рассмотренный способ оценки последствий мер экономической политики ши­
роко применяется на практике. Так, при подготовке налоговых реформ эконо­
мисты рассчитывают изменения потребительских излишков в зависимости от
различных вариантов налогообложения и, анализируя полученные результа­
ты с учетом необходимого размера налоговых поступлений, останавливаются
на тех вариантах, которые вызывают наименьшее сокращение потребитель­
ских выгод.
Интегральное исчисление в биологии
5.
5.1.
Численность популяции
Число особей в популяции (численность популяции) меняется со временем.
Если условия существования популяции благоприятны, то рождаемость пре­
вышает смертность и общее число особей в популяции растет со временем.
Будем называть скоростью роста популяции прирост числа особей в едини­
цу времени. Обозначим эту скорость v = v(t). В "старых", установившихся
популяциях, давно обитающих в данной местности, скорость роста v(t) мала
и медленно стремится к нулю. Но если популяция молода, ее взаимоотноше­
ния с другими местными популяциями еще не установились или существуют
внешние причины, изменяющие эти взаимоотношения, например сознатель­
ное вмешательство человека, то v(t) может значительно колебаться, умень­
шаясь или увеличиваясь.
Если известна скорость роста популяции v(t), то можно определить при­
рост численности популяции за промежуток времени от £о до Т. Действи­
тельно, из определения v(t) следует, что эта функция является производной
от численности популяции N(t)
в момент t и, следовательно, численность
популяции N(t) является первообразной для v(t).
Поэтому
т
N(t)-N{t )
(5.1)
= Jv{t)dt.
0
to
Известно, что в условиях неограниченных ресурсов питания скорость ро­
ста многих популяций экспоненциальна, т. е. v(t) — ae .
kt
Популяция в этом
случае как бы "не стареет". Такие условия можно создать, например, для
микроорганизмов, пересаживая время от времени развивающуюся культуру
в новые емкости с питательной средой. Применяя формулу ( 5.2), в этом
случае получим:
г
N(t)
= N(t )
0
+af
e dt = N{t )
kt
0
+ ^ (e
kT
- e °).
kt
(5.2)
По формуле, подобной полученной выше, подсчитывают, в частности, чис­
ленность культивируемых плесневых грибков, выделяющих пенициллин.
5.2.
Биомасса популяции
Рассмотрим популяцию, в которой масса особи заметно меняется в течение
жизни, и подсчитаем общую биомассу популяции. Пусть т означает возраст
в тех или иных единицах времени, а N(T) - число особей популяции, возраст
которых равен т. Пусть, кроме того, Р(т) - средняя масса особи возраста т,
а М(т) - биомасса всех особей в возрасте от 0 до т.
Заметив, что произведение ЛГ(т) • Р(т) равно биомассе всех особей воз­
раста т, рассмотрим разность М{т + Д т ) — М(т), где Д т > 0. Очевидно,
что эта разность, равная биомассе всех особей в возрасте от т до т + Дт,
удовлетворяет неравенствам:
N(7)
• Р{т)Ат < М{т + Д т ) - М(т) < Щт) • Р(т)Ат,
где N ( T ) • Р(т) — наименьшее, a N(f)
• Р(т) ~ наибольшее значения функции
ЛГ(т) • Р(т) на отрезке [т, т + Д т ] . Учитывая, что Д т > 0, из полученных
неравенств, имеем:
m
.
< Щг
m
+ Ат)-М(т)
^
Дт
Из непрерывности функции N ( T ) • Р(т) следует, что
lim N(T) • Р(т) =
Дт-Ю
lim JV(f) • P(f)
= N(r)
• Р(т).
Дг->0
Поэтому будем иметь
..
М(т +
lim —
Ат)-М{т)
-г— = N(r)
• Р(т)
Дт
Дт-+о
или
™
=
ВД.Р(Т).
Следовательно, биомасса М(т) является первообразной для N(T) • Р(т)
М(Т)
- М ( 0 ) = УтЩт) •
P(r)dT,
где Т - максимальный возраст особи в данной популяции. Так как М ( 0 ) ,
очевидно, равно нулю, то окончательно получаем:
г
(5.3)
о
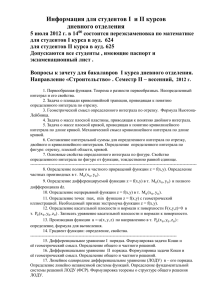
5.3.
Средняя длина пролета
В некоторых исследованиях необходимо знать среднюю длину пробега, или
среднюю длину пути при прохождении животным некоторого фиксирован­
ного участка. Приведем соответствующий расчет для птиц. Пусть участком
будет круг радиуса R. Будем считать, что R не слишком велико, так что
большинство птиц изучаемого вида пересекает этот круг по прямой.
у
с
о
Птица может под любым углом в любой точке пересечь окружность. В
зависимости от этого длина ее пролета над кругом может быть равной любой
величине от 0 до 2п. Определим среднюю длину пролета L .
Так как круг симметричен относительно любого своего диаметра, доста­
точно ограничиться лишь теми птицами, которые летят в каком-нибудь одном
направлении, параллельном оси OY. Тогда средняя длина пролета - это сред­
нее расстояние между дугами АСВ
значение функции fi(x)
и ACiB.
Другими словами, это среднее
— /2(2;), где у = fi(x)
- уравнение верхней дуги, а
У = / г ( ^ ) - уравнение нижней дуги, т. е.
J{h(x)
L = ^
b—a
f (x)]dx
2
(5.4)
ь
Так как J f\{x)dx
а
равен площади криволинейной трапеции aACBb,&
b
J
а
J2(x)dx
равен площади криволинейной трапеции аАС\ВЬ, то их разность равна пло­
щади круга, т.е. пК .
2
Разность Ь — а равна, очевидно, 2R. Подставляя эти
данные в выражение для L , получим L ==^R.
Отметим, что приведенные примеры далеко не исчерпывают возможных
приложений определенного интеграла в биологии.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
Х.Ахтямов A.M. Математика для социологов и экономистов: учеб. посо­
бие. М.: ФИЗМАТЛИТ, 2004. 464 с.
2. Баврин И.И. Высшая математика. М.: Просвещение, 1993. 319 с.
3. Высшая математика для экономистов: учебник для вузов / Н.Ш. Кремер, Б.А. Путко, И.М. Тришин, М.Н. Фридман; Под ред. проф. Н.Ш. Кремера. 2-е изд., перераб. и доп. М.: ЮНИТИ, 2001. 471 с.
4. Луканкин Г., Хоркина Н. Приложение определенного интеграла в эко­
номике. U R L : h t t p : / / m a t . l s e p t e m b e r . r u / 2 0 0 1 / 1 3 / n o l 3 _ 0 1 . h t m .
5. Ляпунова М.Г. Приложение определенных интегралов к решению задач
геометрии и физики: учеб.-метод. пособие. Благовещенск: Амур. гос. ун-т,
2000. 43 с.
6. Пискунов Н. С. Дифференциальное и интегральное исчисления для вту­
зов. М.: Наука, 1985. Т. 2. 560 с.
7. Письменный Д. Т. Конспект лекций по высшей математике. М.: Айриспресс, 2003. 288 с.
8. Солодовников А.С,
Бабайцев В.А. Математика в экономике. М.: Фи­
нансы и статистика, 2005. 560 с.
9. Фихтенгольц Г.М. Курс дифференциального и интегрального исчисле­
ния. М.: Наука, 1966. Т. 2. 800 с.
10. Шипачев B.C. Высшая математика. М.: Наука, 2003. 684 с.
Б р о й т и г а м Ирина Николаевна
Некоторые приложения
определенного интеграла
Часть 1. Теория
Учебно-методическая
разработка
Печатается в авторской редакции
Оригинал-макет И.Н. Бройтигам
Подписано в печать 20.01.2009. Формат 6 0 x 8 4 1/16.
Бумага писчая. Объем 2,56 п. л.
Тираж 50 экз. Заказ № 60
Издательство Поморского университета
163002, Архангельск, просп. Ломоносова, 6
E-mail: publish@pomorsu.ru