Алгоритм управления движением судов, идущих
advertisement

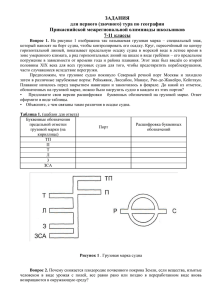
Ж У Р Н А Л университета в о д н ы х коммуникаций рования работы АСУ ТВФ, который состоит из поста информационно-диспетчерской службы (ИДС), лица, принимающего решения (ЛПР), и базы данных; — систему взаимодействия с АСУ ДС и РИС с использованием оперативной громкоговорящей связи, телефонной и факсимильной связи, электронно-картографических навигационных информационных систем (ЭКНИС). В структурной схеме АСУ ТВФ необходимо выделить немаловажную с точки зрения повышения уровня безопасности цепочку: система мониторинга знаков навигационного оборудования — береговые и плавучие знаки навигационного оборудования — обстановочный флот, которая при использовании АИС и дифференциальных подсистем ДГЛОНАСС/ DGPS позволит непрерывно отслеживать положение знаков навигационного оборудования и в случае необходимости оперативно восстанавливать поврежденные или смещенные СНО. Список литературы 1. Петухов Ю. В. Информационное и математическое обеспечение построения береговой сети автоматизированных идентификационных систем для мониторинга и управления судоходством на внутренних водных путях ЕГС европейской части России: автореф. дисс. ... канд. техн. наук. — СПб.: СПГУВК, 2008. — 20 с. 2. Федеральная целевая программа «Развитие транспортной системы России (2010–2015 годы) в редакции Постановления Правительства Российской Федерации от 20 мая 2008 г. № 377. УДК 681.3.07:656.6 А. П. Нырков, д-р техн. наук, профессор, СПГУВК; П. В. Викулин, СПГУВК АЛГОРИТМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ, ИДУЩИХ ПЕРЕСЕКАЮЩИМИСЯ КУРСАМИ ALGORITHM OF MANAGEMENT OF THE SHIPS MOVEMENT, WHEN ITS COURSES INTERSECT 100 В статье рассматривается процесс расхождения судов, идущих пересекающимися курсами. Определяются параметры движения судна для построения траектории относительного движения при выполнении маневра расхождения. Предлагается использовать разработанный алгоритм для построения траектории движения. The article discusses the process of divergence of ships when the courses of ships intersect. The parameters of the ship’s movement at construction of the trajectory of relative movement to perform maneuver discrepancies are determined. The author suggests using the algorithm developed to construct the ship trajectory. Ключевые слова: АИС, контрольная точка, дистанция кратчайшего сближения, маневр расхождения, параметры движения судна, алгоритм автоматизированного управления. Key words: AIS, the control point, distance of closest approach, maneuver of discrepancies, parameters of the vessel, algorithm for automated control. Ж У Р Н А Л университета в о д н ы х коммуникаций В личение дистанции между судами. МИРОВОЙ практике особый интеИспользование современных систем рес для исследования представляет информационного сопровождения, таких как решение задачи построения траекавтоматическая идентификационная систетории относительного движения в соответма (АИС), позволит изменить представление ствии с инерцией и криволинейным движепроцесса прокладки траекторий при расхожнием судна. Применение математических медении судов. тодов, прямо рассчитанных на безопасность судоходства, в частности оценки опасности Имея четкое представление о коордисближения дистанции до точки кратчайшего натах, скорости и времени движения судна, сближения, позволит моделировать процесс можно с большой точностью построить липостроения траектории движения судов, идунии относительного движения и указать точку пересечения судов, время и дистанцию до щих пересекающимися курсами, во избежапересечения. Используя данные о габаритах ние столкновений. судна, передаваемые АИС в качестве судоходВ соответствии с Правилом 15 МППСС ной информации, можно определить расчетсудно, обязанное уступить дорогу, может приным путем дистанцию безопасного движения бегнуть к изменению курса и скорости (курса или скорости). Для этого изменяют курс вправо судна Dsec. Она и будет определять условие на величину, превышающую значение пеленбезопасного расхождения судна. га П на кормовую оконечность другого судна. На рис. 1 точка пересечения движения Этим курсом следуют до прохода судна, польсудов обозначена как O. Суда, идущие пересекающимися курсами, — A и B. Дистанции зующегося преимуществом при расхождении, пересечения курсов — AO и BO делятся на за траверз, затем ложатся на первоначальный равные участки, определяемые периодом врекурс. Величина отворота от пеленга на другое мени t, в течение которого поступают коордисудно определяется значением курсового угла наты движения. Используя в качестве отправна него, дистанцией расхождения и отношением скоростей расходящихся судов. ных точек скорость движения судна, текущие Уменьшение скорости должно быть координаты и период времени, мы прокладывыполнено на величину не менее 1–2 ступеней хода. В этом случае попытку судна, обязанного уступить дорогу, пройти по носу другого судна на дистанции менее 20 кабельтовых следует считать опасным действием, которое может явиться причиной столкновения. В свою очередь судно, пользующееся преимуществом при расхождении, должно по возможности сохранять первоначальные курс и скорость, контролируя, насколько своевременно и четко другое судно выполняет предписанные ему действия [1]. Характерными признаками успешного выполнения маневра при расхождении судов, следующих пересекающимися курсами, являются быстрое изменение пеленга на корму и увеРис. 1. Переход судна на первоначальный курс 101 Ж У Р Н А Л университета в о д н ы х коммуникаций ваем линии относительного движения судов с временными отметками участков пути для определения предполагаемого нахождения судов. Для определения траектории расхождения осуществляется расчет нового курса вправо для каждой величины пеленга на судно B, равной точке предполагаемого нахождения (рис. 1). Для каждого нового курса судна A в точках предполагаемого нахождения рассчитывают дистанцию безопасного движения судна Dsec и сравнивают с аналогичной дистанцией судна B. В качестве результата сравнения используется кратчайшее расстояние между дистанциями безопасного движения двух судов. Например, Dsec при положении судна B в контрольной точке № 5 сравнивается с Dsec при положении судна А в контрольной точке № 5. Сравнение происходит для каждой контрольной точки. В результате мы получаем величину кратчайшего расстояния между дистанциями безопасного движения двух судов для каждого курса и на основе вычисления наименьшего выбираем новый курс судна. Этим курсом следуют до контрольной точки, в которой и было зафиксировано наименьшее значение, затем ложатся на первоначальный курс. На рис 2 схематично показана точка C, в которой и осуществляется переход на первоначальный курс. Путем вычислений величина кратчайшего расстояния была определена в 102 Рис. 2. Точка перехода на первоначальный курс университета в о д н ы х коммуникаций Ж У Р Н А Л контрольной точке № 5,5; именно здесь и выполняется переход. При переходе на новый курс движение судна осуществляется с отклоненным рулем по криволинейной траектории, которая называется циркуляцией судна. Циркуляцией также называют траекторию, описываемую центром тяжести судна при движении с отклоненным на постоянный угол рулем. На движение судна также оказывают влияние инерция судна, скорость движения, волнение, сила ветра, присоединенная масса воды, угловая скорость и т. д. Все эти факторы и будут определять траекторию движения. Для построения относительной траектории движения судна мы будем использовать значения маневренных и инерционных характеристик судна, в результате чего применим идеальную траекторию движения, которая будет описывать путь AC (рис. 2). Так как из-за воздействия на судно различных сил траектория относительного движения и дистанция AC будут изменяться (например, AC’ и AC”), то для безопасного расхождения необходимо определить дистанцию AC и траекторию относительного движения. Задачу определения элементов криволинейного движения судна можно рассмотреть как плоскую задачу динамики. Для описания криволинейного движения вводим две системы координат — неподвижную X0О0Y0 и подвижную XGY, которая жестко связана с судном (см. рис. 3). Направление осей неподвижной системы координат выбирается таким образом, чтобы в начальный момент она совпадала с подвижной [2]. Рис. 3. Параметры криволинейного движения судна Угол, образуемый пересечением оси X0 с диаметральной плоскостью Ψ, называется углом курса судна. Угол β называется центральным углом дрейфа и измеряется между мгновенным вектором скорости центра тяжести судна и диаметральной плоскостью. Угол φ называется углом скорости, он измеряется между вектором скорости и осью X0. Движение судна задано проекциями скорости центра тяжести судна на подвижные оси, угловой скоростью и системой кинематических параметров — модулем скорости центра тяжести судна | V |, углом дрейфа β и угловой скоростью Ω. Обе системы связаны между собой следующими соотношениями [2]: . (1) Если в результате натурного эксперимента или расчета нам известны кинематические параметры криволинейного движения судна и их изменение во времени, то можно получить положение судна в плане на любой произвольный момент времени. Координаты судна в неподвижной системе координат определяются следующими соотношениями: ; (2) ; Так как , то (3) . (4) Используя вышеприведенные соотношения, можно построить траекторию движения судна и определить направление его диаметральной плоскости. При криволинейном движении угол скорости φ изменяется в зависимости от угловой скорости судна Ω. Для расчета и вычисления маневра при расхождении судов, следующих пересекающимися курсами, необходимо реализовать математическую модель движения судов по вычисляемым траекториям согласно заданному маршруту движения. В процессе реализации составляется система уравнений, позволяющая рассчитать траектории движения судов. 103 Ж У Р Н А Л университета в о д н ы х коммуникаций Отличительная особенность предлагаемой модели заключается в том, что в качестве источника информации о кинематических параметрах движения судов используется АИС, которая позволяет передавать и принимать необходимые для вычисления данные о координатах, скорости и скорости поворота судна. Таким образом, расхождение судов на участке движения в этой системе определяется выражениями: ; (5) , (6) где: X A, YA — координаты местоположения судна A; VA — скорость судна A; φA — угол скорости судна A; ΨA — угол курса судна A; Ω A — угловая скорость судна A; XB, YB — координаты местоположения судна B; VB — скорость судна B; φB — угол скорости судна B; ΨB — угол курса судна B; Ω B — угловая скорость судна B. При определении местоположения судна в неподвижной системе координат происходит отклонение от заданного маршрута при появлении смещения от первоначального курса. Одновременно с вычислением координат производится вычисление расхождения судов при использовании дистанции безопасного движения судна Dsec. Алгоритм построения траектории относительного движения для выполнения маневра расхождения судов, идущих пересекающимися курсами, в заданной дистанции при изменении курса показан на рис. 4. Он осуществляется в следующей последовательности. Последовательность действий при выполнении алгоритма построения траектории относительного движения 104 Получение данных с датчиков и АИС В результате работы АИС происходит получение навигационных данных от других участников движения, а также получение данных с датчиков, установленных на судне Определение точки пересечения Для судов, которые следуют с неизменными курсом, угловой скоростью и скоростью движения, выполняется расчет точки пересечения траекторий движения судов Определение контрольных точек движения судов По временным отрезкам определяются и устанавливаются значения контрольных точек Вычисление нового курса Происходит вычисление нового курса судна относительно контрольной точки Определение положения судов по значениям контрольных точек при прохождении дистанции Выполняется определение положений судов по значениям контрольных точек при прохождении дистанции Построение Dsec для положений судов по значениям контрольных точек Выполняется построение Dsec в виде окружности для определения безопасного движения судна Расчет расстояния между Dsec двух судов Выполняется расчет расстояния между Dsec двух судов для обеспечения выполнения маневра расхождения Расчет траектории движения и выполнение маневра По полученным параметрам движения происходит построение траектории движения судна и выполняется маневр расхождения Ж У Р Н А Л университета в о д н ы х коммуникаций Рис. 4. Алгоритм построения траектории относительного движения Список литературы 1. Смирнов Н. Г. Теория и устройство судна: Учебник для речных училищ и техникумов. — М.: Транспорт, 1992. — 248 с. 2. Антонов В. А., Письменный М. Н. Теоретические основы управления судном. — М.: МГУ им. адм. Г. И. Невельского, 2007. 105