Алгоритм зеркального спуска (ЗС) представляет
advertisement
 представляет")
c 2014 г.
⃝
А.В. НАЗИН, д-р физ.-мат. наук; nazine@ipu.ru,
С.В. АНУЛОВА, канд. физ.-мат. наук; anulovas@ipu.ru,
А.А. ТРЕМБА, канд. физ.-мат. наук; atremba@ipu.ru
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
АЛГОРИТМ ЗЕРКАЛЬНОГО СПУСКА
ДЛЯ МИНИМИЗАЦИИ СРЕДНИХ ПОТЕРЬ,
ПОСТУПАЮЩИХ ПУАССОНОВСКИМ ПОТОКОМ
1
Для стохастической системы, функционирующей в непрерывном времени, рассматривается задача минимизации ожидания интегральных потерь на заданном горизонте.
Потери происходят в моменты скачков пуассоновского процесса и являются непрерывной выпуклой функцией управляющего параметра, значения которого образуют
выпуклый компакт в конечномерном пространстве. В моменты скачков оракул выдает
стохастически зашумленные субградиенты функции потерь, ограниченные в среднеквадратическом; шум аддитивный, несмещенный. Предлагается стратегия управления,
порожденная алгоритмом зеркального спуска. Для нее доказана явная верхняя граница
превышения ожидания интегральных потерь над минимумом. Рассмотрен пример, в
котором эта стратегия применена к модели массового обслуживания.
1. Введение
Алгоритм зеркального спуска (ЗС) представляет собой нетривиальное
обобщение стандартного метода градиента для задач выпуклой оптимизации в условиях априорной неопределенности [1]. В ряде случаев
он имеет преимущество перед другими алгоритмами поиска экстремума
при высокой размерности: его гарантируемая скорость сходимости значительно выше. Это ярко выражается и в прикладных задачах, таких,
например, как томография [2], классификация [3] и ранжирование [4].
Первоначальная идея метода ЗС описана в [1] в непрерывном времени,
но сами алгоритмы как в [1], так и в последующих работах по ЗС пред1
Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследований
(проект № 12-08-01245). Первый автор также частично поддержан лабораторией ПреМоЛаб при МФТИ
(ГУ), грант Правительства РФ № 11.G34.31.0073.
1
ставлены в дискретном времени. Мотивация данной статьи — расширить
область применения алгоритмов зеркального спуска к стохастическим
системам со случайным дискретным временем, связанным с наблюдаемым пуссоновским потоком интенсивности λ. Основным результатом
является явная неасимптотическая верхняя оценка для превышения
минимизируемой функции в текущей оценке над минимумом; при этом
оказывается, что заданный горизонт времени T умножается на интенсивность λ. В частности, в задаче выпуклой минимизации на стандартном
симплексе в RN при априорном условии, что ∞-норма стохастического
градиента ограничена параметром L, верхняя оценка полиномиально
зависит от ln N , а не от степени N (что обычно возникает в стандартном
методе градиента).
2. Постановка задачи
Пусть некоторая управляемая система (например, маршрутизатор)
обрабатывает сообщения, поступающие в случайные моменты 0 < τ1 <
τ2 < τ3 . . . В каждый момент τi система несет потери, и задача
оптимального управления содержательно состоит в минимизации математического ожидания суммарных потерь на заданном временно́м интервале [0, T ]. Потери зависят от управляемого параметра, эта зависимость
описывается выпуклой функцией Q, заданной на выпуклом компакте
в конечномерном евклидовом пространстве. Сам процесс потерь не
наблюдается, но имеется текущая информация, которая соответствует
«градиентному» оракулу: в каждый момент времени τi выходом оракула
является стохастически зашумленный субградиент функции Q — стохастический субградиент.
2
2.1. Базовые определения
Перейдем к точным формулировкам. Обозначим через IA индикатор
множества A, т.е. функцию, равную единице на A и нулю вне A.
Евклидово пространство RN будет рассматриваться с некоторой нормой
√
∥·∥ (не обязательно ∥x∥ = x21 + · · · + x2N ), а двойственное пространство
RN — с нормой ∥ · ∥∗ = sup∥x∥61 ⟨·, x⟩, где ⟨·, ·⟩ обозначает скалярное
произведение.
Пусть дано вероятностное пространство (Ω, G, P), на котором определены два независимых объекта: пуассоновский процесс Xt , t ∈ [0, ∞), и
последовательность независимых одинаково распределенных центрированных квадратично интегрируемых случайных величин ξ(1), ξ(2), . . .
с значениями в RN . Обозначим через τ1 , τ2 , τ3 . . . последовательные
моменты скачков процесса X и добавим τ0 = 0. Определим процесс
∑
ξt = ∞
i=1 ξ(i)I[τi ,τi+1 ) (t), t ∈ [0, ∞).
2.2. Функция потерь
Пусть дан выпуклый компакт Θ ⊂ RN — множество параметров
управления. На Θ заданы непрерывная выпуклая функция потерь Q :
Θ → R+ и ее субградиент — ограниченная борелевская вектор-функция
∂Q : Θ → RN , удовлетворяющая условию
(∂Q(θ), θ′ − θ) 6 Q(θ′ ) − Q(θ)
∀ θ, θ′ ∈ Θ .
Из непрерывности Q следует, что она ограничена снизу и существуют
(1)
Q∗ = min Q и θ∗ = argmin Q.
θ∈Θ
θ∈Θ
3
2.3. Задача управления
Множество стратегий управления U состоит из всевозможных
кусочно-постоянных случайных процессов ut с значениями в Θ вида
∑
ut = ∞
i=0 θ(i)I[τi ,τi+1 ) (t), определяемых следующим образом. Неслучайное θ(0) ∈ Θ может быть выбрано произвольно; положим
g(i) = ∂Q(θ(i − 1)) + ξ(i) ,
(2)
где θ(i) — произвольная измеримая функция от случайных величин
g(1), . . . , g(i) с значениями в Θ, i = 1, 2, . . . Соответствующий процесс в
непрерывном времени записывается следующим образом2 :
(3)
gt = ∂Q(ut− ) + ξt ,
t ∈ [0, T ].
Далее задается горизонт времени T > 0 и определяется функционал
(критерий управления)
∫
(4) RT ({ut }) , E
T
Q(ut− )dXt = E
0
i=X
∑T
Q(uτi − ) = E
i=1
i=X
∑T
Q(θ(i − 1)) .
i=1
Идеальная задача управления — минимизировать этот функционал по
множеству стратегий U.
Очевидно, для любой u ∈ U выполнено:
RT (u) > Q∗ EXT .
С другой стороны, для стационарной стратегии управления u = {ut =
θ, t ∈ [0, ∞)} с фиксированным θ ∈ Θ выполнено RT (u) = Q(θ)EXT , а
значит, inf RT (u) по стационарным стратегиям u равен Q∗ EXT . Следовательно, inf RT (u) = Q∗ EXT . Поскольку для пуассоновского процесса
u∈U
2
Под ut− имеется в виду левосторонний предел.
4
EXT = λT, то имеем
inf RT (u) = Q∗ λT = Q(θ∗ )λT.
u∈U
2.4. Дополнительные предположения
Полагаем, что априори известны интенсивность пуассоновского потока λ > 0 и константа L ∈ (0, ∞), ограничивающая стохастические
градиенты в среднеквадратическом:
E∥g(i)∥2∗ 6 L2 ∀ i = 1, 2, . . .
(5)
3. Алгоритм зеркального спуска (ЗС)
Напомним, что алгоритм зеркального спуска представляет собой
прямо-двойственный метод [1–6]. Исходным пространством является
E = RN с нормой ∥ · ∥, а двойственным — E ∗ = RN с соответствующей
нормой ∥ · ∥∗ . Алгоритм ЗС содержит функциональный параметр Wβ :
E ∗ → R — выпуклую непрерывно дифференцируемую функцию со
скалярным параметром β > 0 и удовлетворяющую следующему условию
Липшица:
(6)
∥∇Wβ (z) − ∇Wβ ( z̃ )∥ 6
1
∥z − z̃∥∗
αβ
∀ z, z̃ ∈ E ∗ , β > 0 ,
причем α > 0 — не зависящая от β постоянная. Отметим, что в алгоритме
используется потенциальное поле ∇Wβ : E ∗ → Θ, отображающее E ∗ в
множество Θ (см. далее предложение 1, п. 2, (ii)).
Для рассматриваемой здесь задачи алгоритм ЗС запишем в следующем виде с учетом непрерывности времени и специфики пуассоновского
процесса.
5
1. Фиксируем начальные значения пары сопряженных переменных:
.
.
ζ0 = ζ(0) = 0 ∈ E ∗ и θ0 = θ(0) = −∇Wβ (ζ(0)).
2. Для каждого момента времени t ∈ [0, T ] получаем выход оракула
∑∞
gt =
(2) и формируем траекторию
i=1 g(i)I[τi ,τi+1 ) (t) с учетом
стохастического дифференциального уравнения в E ∗ в паре с алгебраическим уравнением:
(7)
(8)
dζt = dgt ,
ut = −∇Wβ (ζt ) .
3. В момент времени T получаем реализованную траекторию {ut } и
если функция потерь Q задана, то соответствующие интегральные
потери
b T ({ut }) =
R
∑
Q(θ(i − 1)) ,
i>1,τi 6T
где τi — моменты скачков процесса Xt .
З а м е ч а н и е 1. Очевидно, что определяемая таким образом стратегия u принадлежит U. Фактически, уравнения (7)–(8) означают, что в
моменты времени τi , i = 1, 2, . . . , происходит пересчет величин
ζ(i) = ζ(i − 1) + g(i) ,
θ(i) = −∇Wβ (ζ(i)) .
Для полноты приведем ряд определений и предложений из [3], разъясняющих и дополняющих суть построений алгоритма ЗС (подробнее
см. [3, § 3] и приведенную библиографию).
О п р е д е л е н и е 1. Пусть α > 0. Выпуклая функция V : Θ → R
называется α-сильно выпуклой относительно исходной нормы ∥ · ∥ ,
6
если
(9)
V (sx + (1 − s)y) 6 sV (x) + (1 − s)V (y) −
α
s(1 − s)∥x − y∥2
2
при любых x, y ∈ Θ и s ∈ [0, 1].
П р е д л о ж е н и е 1. Пусть функция V : Θ → R выпукла, а параметр
β > 0. Тогда β-сопряженная к V функция
{
}
Wβ (z) = sup −z ⊤ θ − βV (θ)
(10)
∀ z ∈ E∗
θ∈Θ
обладает следующими свойствами:
1. Функция Wβ : E ∗ → R выпукла и имеет сопряженную βV , т.e.
{
}
∀ θ ∈ Θ βV (θ) = sup −z ⊤ θ − Wβ (z) ;
(11)
z∈E ∗
2. Если функция V является α-сильно выпуклой относительно
исходной нормы ∥ · ∥, то:
(i) выполнено условие (6),
{
}
(ii) argmax −z ⊤ θ − βV (θ) = −∇Wβ (z) ∈ Θ .
θ∈Θ
З а м е ч а н и е 2. В соответствии с предложением 1, п. 2, (ii) уравнение
(8) можно записать в виде
{
}
ut = argmin ζt⊤ θ + βV (θ) .
θ∈Θ
О п р е д е л е н и е 2. Назовем функцию V : Θ → R+ прокси-функцией,
если она выпукла и
(i) существует такая точка θ∗ ∈ Θ, что min V (θ) = V (θ∗ ),
θ∈Θ
(ii) для β-сопряженной к V функции Wβ выполнено условие (6).
В [5, с. 1586] даны примеры прокси-функций в случае минимизации
на симплексе: квадратичная и энтропийная.
7
4. Основной результат
Т е о р е м а 1. Пусть алгоритм ЗС с прокси-функцией V : Θ → R+
реализует стратегию ut на горизонте T > 0 при описанных выше
условиях. Тогда справедливо неравенство
√
b T ({ut }) − inf RT (u) 6
ER
(12)
u∈U
2T λ V
L.
α
Параметр алгоритма α описан в (9), a β и V задаются
√
Tλ
(13)
β=
L , V > max V (θ) .
θ∈Θ
2αV
Д о к а з а т е л ь с т в о т е о р е м ы 1. Имеем
[
= E I{XT >1}
=E
n=∞
∑
n=1
XT
∑
i=1
I{XT =n}
{[∑n
i=1
b T ({ut }) − inf RT (u) =
ER
u∈U
]
Q(θ(i − 1)) − XT Q(θ∗ ) =
]}
Q(θ(i − 1)) − nQ(θ ) 6
∗
(
)
n 2
6E
I{XT =n} βV +
L 6
2αβ
)
( n=1
XT 2
λT 2
L = βV +
L.
6 E βV +
2αβ
2αβ
n=∞
∑
Поясним неравенство в этой цепочке. При условии события
{XT = n} случайные величины ξτ1 , ξτ2 , . . . , ξτn распределены так же, как
ξ(1), ξ(2), . . . , ξ(n), и алгоритм работает так же, как в модели [3] с дискретным временем и n шагами. Это позволяет применить предложения 2
и 3 из [3, § 4], c γi ≡ 1 и получить рассматриваемое неравенство —
явную верхнюю оценку превышения средних интегральных потерь над
минимумом. В правой части остается провести минимизацию по β > 0.
Приходим к (13) и желаемому неравенству (12). Теорема доказана.
8
5. Пример
Пусть горизонт времени T зафиксирован и сервер получает запросы в
моменты времени, сформированные пуассоновским процессом. Каждый
запрос содержит N типов задач, и каждый j-й тип задачи требует
ηj затрат (некоторого ресурса, например времени). Эти неотрицательные величины — случайные, таким образом, полученную в момент i
заявку можно характеризовать вектором случайных величин3 η(i) =
(η1 (i), . . . , ηN (i)). Для фиксированного j-го типа задачи случайные величины ηj (i) с течением времени (i = 1, 2, . . .) образуют последовательность одинаково распределенных случайных величин, независимых
между собой и между затратами других типов задач.
В момент получения каждой заявки сервер может выбрать одну из
задач и перенаправить её на другой сервер, тем самым не производя
затрат на ее обработку. Реализации количества затрат в полученном запросе становятся известными после решения о перенаправлении задачи и
только для принятых задач. Цель состоит в том, чтобы минимизировать
суммарные затраты (с начального момента времени до T ) при ограничении, что в каждом запросе в среднем может быть перенаправлена только
малая доля4 задач δ.
Будем использовать следующий сценарий работы сервера. Введем вектор управляющих переменных θ = (θ1 , . . . , θN )⊤ , где θj ∈
∑N
∈ [0, 1],
j=1 θj = 1. В момент прихода i-го запроса случайно выбирается тип задачи — кандидата на перенаправление согласно дискретному
распределению между N типами с вероятностями θ1 (i − 1), . . . , θN (i − 1).
3
4
Так же будет обозначаться реализация этих случайных величин, отличие ясно из контекста.
Таким образом, в каждом запросе в среднем отбрасывается δN < 1 задач.
9
После этого данная задача перенаправляется с вероятностью δN .
Очевидно, что оптимальным решением будет определение типа задачи
— кандидата на перенаправление с максимальным математическим
ожиданием.
Формально требуется минимизировать функцию
N
∑ ∑
RT = E
(14)
η j (i),
i:τi 6T j=1
где
η j (i) =
ηj (i),
если задача j-го типа в i-м запросе
обслуживалась на сервере,
0,
если задача была перенаправлена,
на симплексе
Θ = {θ :
N
∑
θj 6 1, 0 6 θj 6 1, j = 1, . . . , N }.
j=1
Функция (14) обладает той же структурой, что (4), c
N
∑
Q(θ) =
(1 − δN θj )Eηj .
j=1
Градиент этой функции равен (−δN Eη1 , . . . , −δN EηN )⊤ , но он наблюдается на сервере только через величины η j (i), таким образом, g(i) =
(
)⊤
η 1 (i−1)
η N (i−1)
− 1−δN θ1 (i−1) , . . . , − 1−δN θN (i−1) .
В качестве прокси-функции используется энтропийная функция
∑
V (θ) = ln N + N
j=1 θj ln θj с параметром сильной выпуклости α = 1 (по
отношению к норме ∥ · ∥1 см., например, [3]) и максимальным значением
на симплексе V = ln N . Неравенство (12) принимает вид
b T ({ut }) − inf RT (u) 6
ER
u∈U
10
√
2T λ ln N L .
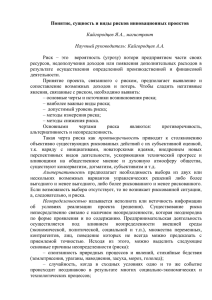
5.1. Численное моделирование
Данные формировались следующим образом. Для каждого типа задач
потери обладали равномерным распределением на интервале (непрерывном или дискретном), причем тип распределения и границы интервала
были однократно случайно выбраны (для каждого типа — свои). Взято
T = 2000, λ = 2, N = 100, δ = 0,006. Было проведено 500 симуляций для
данного набора параметров, и в конце временно́го интервала получены
bT .
реализации интегральных потерь в конечный момент времени R
.
Гистограмма разности этих величин и оптимального значения R∗T =
inf u∈U RT (u) вместе с границей (12) (кружок справа) и эмпирическим
средним данных разностей (вертикальная штриховая линия) изображены на рисунке. Видно, что эмпирическое среднее действительно лежит
в указанных границах.
6. Заключение
В статье представлен алгоритм зеркального спуска, направленный на
минимизацию средних потерь стохастической системы, функционирующей в непрерывном времени, c потерями, возникающими в случайные
моменты скачков пуассоновского процесса с известной интенсивностью.
С возникновением потерь становятся известными стохастически зашумленные градиенты функции потерь; шум аддитивный, несмещенный,
ограниченный в L2 с известной границей. Цель состоит в минимизации среднего значения интегральных потерь на заданном выпуклом
компакте в RN и ограниченном временно́м интервале с горизонтом T .
Для алгоритма доказана явная верхняя граница превышения средних
√
интегральных потерь над минимумом. Граница имеет вид C T с кон11
кретной константой C, см. (12). Теоретический результат подтвержден
содержательным примером.
СПИСОК ЛИТЕРАТУРЫ
1. Немировский А.С., Юдин Д.Б. Сложность задач и эффективность
методов оптимизации. М.: Наука, 1979.
2. Ben-Tal A., Margalit T., Nemirovski A. The Ordered Subsets Mirror
Descent Optimization Method with Applications to Tomography //
SIAM J. Optim. 2001. V. 12. No. 1. P. 79–108.
3. Юдицкий А.Б., Назин А.В., Цыбаков А.Б. и др. Рекуррентное
агрегирование оценок методом зеркального спуска с усреднением //
Проблемы передачи информации. 2005. Т. 41. № 4. С. 78–96.
4. Назин А.В., Поляк Б.Т. Рандомизированный алгоритм нахождения
собственного вектора стохастической матрицы с применением к
задаче PageRank // АиТ. 2011. № 2. С. 131–141.
Nazin A.V., Polyak B.T. Randomized algorithm to determine the
eigenvector of a stochastic matrix with application to the PageRank
problem // Autom. Remote Control. 2011. V. 72. No. 2. P. 342–352.
5. Nemirovski A., Juditsky A., Lan G., et al. Robust Stochastic
Approximation Approach to Stochastic Programming // SIAM J. Optim.
2009. V. 19. P. 1574–1609.
6. Nesterov Yu. Primal-dual subgradient methods for convex problems.
Core discussion paper 2005/67. Louvain-la-Neuve, Belgium: Center for
Operation Research and Econometrics, 2005.
12
60
50
40
30
20
10
0
−1000
0
1000
2000
bT −
R
13
R∗T
3000
4000
5000
Подрисуночная подпись:
bT ) и
Гистограмма реализаций разности между полученной с помощью алгоритма ЗС (R
оптимальной (R∗T ) интегральными потерями.
Подпись на оси ординат:
Число попаданий в соответствующий интервал
14