системный анализ и модели информационного взаимодействия
advertisement

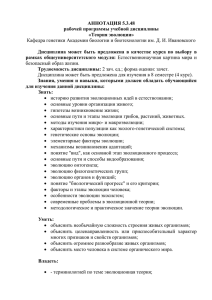
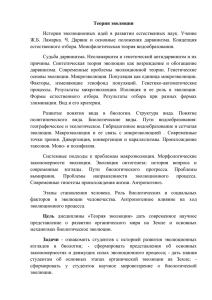
СИСТЕМНЫЙ АНАЛИЗ И МОДЕЛИ ИНФОРМАЦИОННОГО ВЗАИМОДЕЙСТВИЯ МЕХАНИЗМОВ ЭВОЛЮЦИОННОГО РАЗВИТИЯ Н.В. Дилигенский 1, А.П. Ефимов2 Институт проблем управления сложными системами РАН 443020, Самара, ул. Садовая, 61, Россия iccs@iccs.ru тел: +7 (8462) 32-39-27, факс: +7 (8462) 33-27-70 2 Самарский государственный технический университет 443100, Самара, ул. Молодогвардейская, 244, Главный корпус СамГТУ, Россия entcom@samgtu.ru тел: +7 (8462) 32-42-34, факс: +7 (8462) 32-11-06 Ключевые слова: Сложные открытые системы, эволюция, целенаправление, саморазвитие, саморегулирование, самоорганизация, информационное взаимодействие Abstract Self-development, self-regulation and purposefulness models mechanisms, which information cooperation is defined by complex open systems evolution strategy are considered. Введение Процессы эволюции в сложных, открытых системах обуславливают их развитие, повышение разнообразия поведения, образование новых структур, улучшение качества функционирования. Они обеспечивают адаптацию существования систем во внешней, изменяющейся среде. Процессы эволюции являются результатом информационного взаимодействия трех системных механизмов развития: целенаправления, саморегулирования и саморазвития. Целенаправление реализуется внешним воздействием, обеспечивающим изменение состояния системы в желаемом направлении развития. Механизм саморегулирования обеспечивает устойчивость, стабильность функционирования системы на основе отрицательной обратной связи, вырабатывающей внутренние управляющие воздействия, уменьшающие отклонения от желаемого направления развития и компенсирующие влияние всевозможных помех и возмущений. Саморазвитие обуславливается механизмом положительной обратной связи, вырабатывающим цели, определяемые внутренними, структурными и функциональными характеристиками системы. При этом внутренние цели системы, как правило, иные, чем внешние цели, формируемые механизмом целенаправленного развития. При независимом, автономном действии каждый механизм управления играет принципиально различную роль в функционировании систем. Целенаправление определяет генеральную, стратегическую направленность развития системы. Механизм саморегулирования стабилизирует поведение, обеспечивает адаптацию к изменениям, уменьшает многообразие состояний систем, приводит к разрушению, дезорганизации структур. Механизм саморазвития приводит к росту многообразия, к образованию и организации новых структур и существованию неустойчивости, как общесистемного свойства. 1 Базовая модель механизмов эволюционного развития В качестве прототипа развивающейся, эволюционной системы, характеризующейся взаимодействием трех вышеперечисленных механизмов управления, рассмотрим экономическую макросистему с агрегированным капитальным ресурсом. Базовую модель динамики экономи- 84 ческой системы запишем на основе баланса финансовых потоков в форме модифицированного уравнения Солоу [1]. (1) Y + I = П + N , где Y — продукция, произведенная системой, I — внешние финансовое воздействие (внешние инвестиции), П — потребленная продукция, N— финансовые средства, идущие на развитие (внутренние инвестиции). Произведенная продукция Y при стабильном уровне агрегированной технологии производственной деятельности определяется двухфакторной производственной функцией типа Кобба-Дугласа [2] (2) Y (t ) = A ⋅ K α (t ) ⋅ Lβ (t ) , где К(t) – используемые капитальные ресурсы, L(t) – трудовые ресурсы, задействованные в производственной деятельности А, α, β – параметры модели (постоянные), характеризующие эффективность агрегированной технологии, t – время. Потребление П в (1) полагается пропорциональным произведенной продукции (3) П = pY , где р – коэффициент потребления. Считается, что внутренние инвестиции N идут на возобновление израсходованных капитальных ресурсов и на увеличение капитала [1] (4) dK + aK = N , dt где а – коэффициент выбытия (расходования) капитала. Совокупность соотношений (1)÷(4) сводится к одному дифференциальному уравнению относительно капитальных ресурсов К(t) (5) K ′ = (1 − p )ALβ K α − aK + I . Уравнение (5) является некоторой модификацией модели Солоу [1], и описывает эволюцию экономической системы при взаимодействии внешнего воздействия и внутренних механизмов самоорганизации. Первый член правой части уравнения (5) характеризует механизм саморазвития, реализуемый положительной обратной связью. Второй член отвечает механизму саморегулирования, обеспечивающему устойчивость функционирования системы на основе отрицательной обратной связи. Третий член описывает внешнее управляющее воздействие. Положим в (5), что численность трудовых ресурсов L(t) изменяется несущественно за анализируемый период времени Т, и ее можно приближенно положить постоянной, равной среднему значению (6) 1T Lˆ = ∫ L(t )dt . T0 В этом случае модель эволюции экономической системы (5) запишем в следующем виде относительно капитального ресурса системы К (7) K ′ = bK α − aK + I , где b = (1 − p ) ALˆ β . Дадим следующую расширенную интерпретацию полученного уравнения (7)., Учитывая симметричность (2) относительно K и L, рассуждая аналогичным образом, получим, что поведение другого — трудового ресурса L(t) — описывается таким же как (7) уравнением. В соответствии с этим будем считать, что зависимость (2) можно также использовать для описания 85 функционирования развивающейся, эволюционной системы при воздействии иных факторов (ресурсов): природно-сырьевых, топливно-энергетических, информационных, инновационных, и других. Положим далее, что совокупность ресурсов эволюционной системы можно интегрировано охарактеризовать одним агрегированным обобщенным ресурсом X. Его величина получается путем свертывания определенным образом значений основных, базовых факторов. При такой интерпретации будем считать, что уравнение (7) пригодно для описания динамики обобщенного ресурса Х эволюционной системы. В соответствии с приведенными рассуждениями запишем уравнение (7) в следующем виде (8) X ′ = bX α − aX + I . Далее уравнение (8) будем считать базовой агрегированной моделью, усреднено описывающей процессы эволюции в открытых, развивающихся системах. Характеристики и параметры базовой модели будем интерпретировать следующим образом. Величину Y будем считать обобщенной координатой, интегрально характеризующей состояние (потенциал) системы. При этом зависимость Y от обобщенно ресурса Х отвечает постоянной относительной (логарифмической) чувствительности состояния системы к изменению ресурсных воздействий — α = X dY Y dX = const . Из этого следует, что обобщенные координата и ресурс системы связаны элементарным соотношением Y = BX α , где В – масштабный показатель. Очевидно, легко записать уравнение эволюции для координаты состояния Y, однако оно более громоздкое и менее удобное для анализа, и в качестве базовой будем использовать модель (8). Первый член в правой части (8) описывает механизм формирования внутренних целей системы. Параметр b является обобщенным показателем, интегрально характеризующим интенсивность образования внутренних целевых установок. Второй член (8) обеспечивает стабилизацию процессов. Обобщенный параметр a характеризует интегральные издержки на добычу, приобретение, преобразование и использование всех видов ресурсов системы и объединение (агрегирование) их в обобщенный ресурс Х. I – внешнее целенаправляющее воздействие. Будем считать, что агрегированные характеристики системы X(t) и Y(t) являются наблюдаемыми и могут быть каким-либо способом измерены. По фактическим значениям X(t) и Y(t) далее могут быть идентифицированы параметры модели α, a, b. Уравнение (8) записано в непрерывном времени. Данные наблюдений, как правило, существуют для некоторой последовательности моментов времени (лет или других единиц). С учетом этого обстоятельства запишем уравнение (8) для дискретного времени t = n (9) X n +1 = bX nα − ( a − 1) X n + I = f ( a, b, I , α , X n ) , n=0,1,2…. где f (•) - функция последования, характеризующая закон дискретного изменения последовательных состояний эволюционной системы. Далее будем считать, что уравнениями (8), (9) можно описать процессы эволюции неживой и живой природы и общества в технических, эргатических, социально-экономических и экологических развивающихся системах. 2 Процессы эволюции согласованного развития Исследуем возможные стратегии эволюционного развития систем, описываемых уравнениями (8), (9), в зависимости от интенсивности взаимодействующих механизмов саморегулирования, саморазвития и целенаправленного воздействия. На первой стадии изучим сценарии равновесного эволюционирования динамических систем и условия их существования. Равновесные состояния, которые обозначим через X* , Y* , отвечают стационарным решениям (8), (9) при t (или n) → ∞. 86 Следовательно, X* являются корнями алгебраического уравнения (10) aX * α − bX * − I = 0 . Решения (10) определяют равновесные состояния эволюционных систем как функции характеристик механизмов саморегулирования a, саморазвития α и b и целенаправления I. При известных значениях параметров a, α, b, I вычисление величины X* по (10) может быть проведено различными численными методами. Условия наличия конструктивно интерпретируемых решений (10) − вещественных, положительных X* − определяют условия существования равновесных состояний эволюционных систем. По содержательному смыслу величина логарифмической функции чувствительности α является положительной величиной, меньшей единицы. Идентификация значений α в многочисленных конкретных ситуациях показывает, что её значения, как правило, лежат в диапазоне 0,3÷0,8 [4], [5]. Далее, для получения качественно обозримых решений положим α=0,5. Отметим, что при этом структурные свойства процессов эволюции неизменны в диапазоне изменений значений α ∈ (0,1). Получая в этом случае аналитическое решение (10), найдем, что равновесные состояния системы существуют в области значений параметров: (11) I > − b2 . 4a При этом величина обобщенного ресурса X* равна: (12) X * = 1 ⎛ 2 ⋅ ⎜ b + 2aI + b b 2 + 4aI 2a ⎝ ⎞. ⎟ ⎠ Равновесное состояние системы Y* характеризуется обобщенной фазовой переменной: (13) Y * = b ⋅ ⎛⎜ b + b 2 + 4aI ⎞⎟ . ⎠ 2a(1 − p ) ⎝ Соотношения (12), (13) определяют одноточечные аттракторы, притягивающие (или отталкивающие) временные траектории динамических систем. Проанализируем характер эволюционирования систем в окрестности аттрактора (12). В соответствии с (9) динамика процессов однозначно определяется свойствами функции последования f ( a, α , b, I , X ) . В зависимости от поведения f выделим два класса процессов с различными структурными свойствами. При ∂f ∂X * > 0 функция последования определяет тенденцию прогрессивной эволюции, т.е. постоянного роста базовых показателей функционирования системы X* и Y* во времени. В этой области все три различных механизма эволюции − саморегулирования, саморазвития и целенаправления − согласованы, сбалансированы между собой, и в системе протекают гладкие, монотонные процессы достижения равновесного состояния. На рисунке 1 приведены временная траектория и фазовый портрет процессов эволюции для области согласованных механизмов управления. Поведение интегральных траекторий при этом отвечает фазовому портрету «устойчивый узел». Такие процессы согласованного эволюционного развития существует лишь в некоторой области притяжения одноточечного аттрактора (12). Эта область является, по терминологии Н.Н. Моисеева «каналом эволюции» [6, 7], определяющим существование структурно-устойчивых стратегий эволюционирования развивающихся систем. 87 Границей канала согласованного эволюционного развития является условие ∂f ∂X * = 0. Проводя соответствующие вычисления в (9), для границ этого канала эволюции в пространстве параметров a, b, I получим описание: ⎧+ ∞ , 0 < a < 1 ⎪ . (14) I = ⎨ 2 − a b 2 ⋅ , 1< а < ∞ ⎪ 2 ⎩ (1 − a ) 4 1.2 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 1 3 5 7 0 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 0.2 0.4 0.6 0.8 1 1.2 Рисунок 1 Другой границей канала является поверхность (11). На рисунке 2 представлены сечения эволюционного канала согласованного развития в плоскостях управляющих параметров a, b и а, I. а a a 5 2 -6 -4 -2 0 b=4.0 2 4 I 1 2 b 0 1 2 b I>0, I=0.25 Рисунок 2 – Канал согласованного развития. Видно, что согласование различных механизмов эволюции наиболее эффективно осуществляется в зоне малых интенсивностей саморегулирования. При этом с снижением а размеры области сбалансированного развития постоянно увеличиваются, становясь бесконечным при а → 0. интенсивность целеполагания I и саморазвития b немонотонно влияют на размеры этой 1 зоны, и существуют некоторые экстремальные значения I и b, при которых размеры области согласованного развития максимальны. 3 Равновесное, адаптивное, эволюционное развития При ∂f ∂X * < 0 функция последования определяет тенденции негативного эволюционирования динамической системы. В этом случае увеличение базового ресурса, используемого 88 системой Xn, приводит к уменьшению последующего поступающего в распоряжение системы ресурса Xn+1 и, следовательно, к снижению потенциала системы Yn+1. Механизм самоорганизации работает в направлении, противоположном целенаправляемому развитию, и внутренние цели, формируемые контуром саморазвития, противоречат внешним целевым воздействиям. Сценарии эволюции в этом случае отвечают адаптационным процессам отыскания компромиссов между противоположными тенденциями развития. Изучим условия сходимости последовательности компромиссов. В зависимости от глубины противоречий компромиссы могут реализоваться в различных формах. Известно [3], что процессы, описываемые дискретной рекуррентной последовательностью (9) сходятся, если выполняется условие: (15) − 1 < ∂f ( a, α , I , X ) ∂X <1. X =X* Неравенство (15) определяет область существования устойчивых равновесных процессов в эволюционных системах, сходящихся к одноточечному аттрактору (12). Класс стратегий устойчивого, согласованного, эволюционного развития, отвечающих (15) при ∂f ∂X * >0, был исследован выше, и его условия существования определяются соотношениями (11), (14) а также a = 0, отвечающими правой части неравенства (15). Границы области протекания сходящихся адаптационных процессов при ∂f ∂X * < 0, в соответствии с (15) определяются левой частью неравенства (15) ∂f ∂X * = −1 и поверхностью ∂f ∂X * = 0 (14). Проводя соответствующие вычисления в (9) при ∂f ∂X * = −1 , получим следующее выражение для левой границы этой области с ∂f ∂X * < 0. ⎧∞, 0 < a < 2 , ⎪ (16) I = ⎨ 4 − a b 2 . ⋅ , 2<a<∞ ⎪ 2 ⎩ (2 − a ) 4 Таким образом, устойчивый компромисс между противоположными целями самоорганизации и целенаправляемого развития реализуется в области, заключенными между границами (14) и (16). Конфигурации зон существования этого эволюционного канала приведены на рисунке 3. a а 4 4 а 5 2 I 0 2 b 0 1 b Рисунок 3 – Канал равновесного адаптационного развития. Отчетливо видна структуризация обеих границ канала согласованного эволюционного развития и резкое сужение его русла при увеличении а. 89 На рисунке 4 представлены временная траектория и фазовый портрет процессов эволюции для этого случая. Видно, что в этом канале эволюции процессы самоорганизации реализуются в форме колебательных, сходящихся режимов. Поведение интегральных траекторий отвечает фазовому портрету «устойчивый фокус», и стационарным равновесным состоянием является одноточечный, устойчивый аттрактор. 0.45 0.6 0.4 0.5 0.35 0.3 0.4 0.25 0.3 0.2 0.15 0.2 0.1 0.1 0.05 0 33 31 29 27 25 23 21 19 17 15 13 9 11 7 5 3 1 0 0 0.1 0.2 0.3 0.4 0.5 0.6 Рисунок 4 4 Процессы эволюции циклического развития При бόльших рассогласованиях внутренних и внешних целей системы при ∂f ∂X * < –1, противоречия между различными механизмами эволюционного развития настолько возрастают, что оказываются неразрешимыми в классах равновесных состояний. Стационарные решения уравнения (9), отвечающие одноточечному аттрактору, оказываются неустойчивыми. При ∂f ∂X * = −1 решения разветвляются [3, 8] происходит бифуркация, и из одноточечного аттрактора рождается двухточечный. Система переходит в другой канал эволюционного развития в окрестности образовавшегося двухточечного аттрактора. Характеристики двухточечного аттрактора находятся как неподвижные точки двухкратно итерированного дискретного отображения (9), т.е. как решения уравнения (17) X ∗ = f ( f ( a , b, I , X ∗ )) ≡ f 2 ( a , b, I , X ∗ ) . Двухточечный аттрактор является устойчивым в области, левой границей которой является поверхность потери устойчивости одноточечного аттрактора (16), а правая граница, аналогично (15), отыскивается из условия ∂f 2 ∂X * = −1 . В этом канале эволюции двухточечный аттрактор формирует простой, устойчивый, предельный цикл [8, 9]. Соответствующие ему стратегии эволюционного развития отвечают сходящимся процессам динамической самоорганизации — устойчивым автоколебательным режимам. Процессы эволюции имеют характер циклического развития — фаза роста и подъема характеристик системы сменяется этапом спада, уменьшения показателей, и так далее. Эволюционные процессы и фазовые портреты состояний систем в этом канале циклического эволюционного развития приведены на рисунке 5. Конфигурации границ канала аналогичны рассмотренной выше области равновесного, адаптационного развития, при этом диапазон характеристик механизмов эволюции, в которой существует этот класс эволюционных стратегий, уменьшается. При переходе через найденную правую границу устойчивости этого канала эволюции, отвечающему увеличению а и I и уменьшению b, происходит следующая бифуркация, и из двухточечного аттрактора формируется четырехточечный. Его характеристики находятся как решения уравнения 90 (18) X ∗ = f ( f ( f ( f ( a , b, I , X ∗ )))) ≡ f 4 ( a, b, I , X ∗ ) . Соответствующие аттрактору (18) эволюционные процессы отвечают двойному предельному циклу. На рисунке 6 приведены переходный процесс и фазовый портрет, отвечающие такому каналу циклического эволюционного развития. 1.4 1.5 1.2 1.3 1 1.1 0.8 0.9 0.6 0.7 0.4 0.5 0.2 0.3 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 Рисунок 5 1.4 1.5 1.2 1.3 1 1.1 0.8 0.9 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 -0.1 -0.1 0.1 0.3 0.5 0.7 0.9 1.1 1.3 1.5 Рисунок 6 При дальнейшем возрастании a и I и уменьшении b происходит следующая бифуркация, образуется восьмиточечный аттрактор, затем новая бифуркация и шестнадцатиточечный аттрактор и так далее. Эволюционные процессы при этом отвечают большему многообразию самоорганизующихся режимов циклического развития с высоким числом степеней свободы и с сложными предельными циклами. 5 Канал хаотической эволюции При значительной кратности предельных циклов соседние ветви периодических аттракторов находятся весьма близко друг к другу, и при малейших флуктуациях изображающие точки состояний систем случайным образом переходят с одной ветви на другую. В системе начинают протекать неустойчивые, с высокой степени неопределенности процессы самоорганизации эволюционирования. На рисунке 7 приведены временная траектория и фазовый портрет, отвечающие такой ситуации. Видно отсутствие закономерности и прогнозируемости протекания процессов. Такой канал эволюционного развития отвечает странным аттракторам с конечным числом степеней свободы типа Лоренца [10]. В этом случае противоречия взаимодействующих механизмов эволюции — самоорганизации и целенаправления — оказываются настолько большими, что неразрешимы в рамках регулярного поведения систем. Затем число ветвей в каскаде бифуркаций становится бесконечно большим, процессы становятся полностью хаотическими, отвечающие стохастическим, фрактальным, бесконечномер91 ным аттрактором (рисунок 8). Эволюционирование систем оказывается непредсказуемым. В системе наступает хаос, при этом он является структурированным, с детерминированными зонами самоорганизации [8-12]. 1.4 1.6 1.2 1.4 1.2 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 1 2 3 4 5 6 7 8 9 0 10 11 12 13 14 15 16 17 18 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.3 1.5 Рисунок 7 1.4 1.5 1.2 1.3 1 1.1 0.8 0.9 0.6 0.7 0.5 0.4 0.3 0.2 0.1 0 1 2 3 4 5 6 7 8 9 -0.1 -0.1 10 11 12 13 14 15 16 17 18 0.1 0.3 0.5 0.7 0.9 1.1 Рисунок 8 6 Трансформация каналов эволюционного развития Процессы перехода систем из одного канала эволюционного развития в другой происходят по разным сценариям. Для анализа влияния каждого из механизмов эволюции на характер переходов построим расширенные фазовые портреты, где одной из осей будут особые, предельные при n → ∞ значения координаты состояния Y, а другой — каждый из обобщенных параметров a, b, I при фиксированных величинах двух других. Общесистемной закономерностью процессов эволюции является повышение системной эффективности использования ресурсов( возрастание b) и увеличение затрат на приобретение ресурсов – рост a. На рисунке 9 приведен расширенный фазовый портрет в координатах Y, a. Видно, что он имеет вид бифуркационной диаграммы, графически иллюстрирующей ветвления особых состояний систем. На рисунке 9 приведены также полученные путем реализации численных экспериментов инверсные значения показателя Ляпунова L, которые приняты в качестве характеристики устойчивости временных траекторий [9]: ∂f ( a, b, I , X ) 1 M ⋅ ∑ ln m→∞ M m = 0 ∂X (19) L( a, b, I ) = lim , X =Xm где Хm результат реализации численного эксперимента для m-го последовательного отображения зависимости (9) X m = f m ( a , b, I , X 0 ) , X 0 - начальное состояние, М - число экспериментов. Из бифуркационной диаграммы видна последовательная смена при возрастании a разных кана- 92 лов эволюционного развития: согласованного; равновесного, адаптивного: циклического; хаотического. В целом, этот сценарий эволюционного развития отвечает теории универсального перехода к хаосу Фейгенбаума [11, 12]. Рисунок 9 На рисунке 10 приведен сценарий эволюционного развития в координатах Y, b. Видно, что он также характеризуется бифуркационной диаграммой, однако в этом случае разветвление состояний, организация каскада бифуркаций и хаотизация эволюционирования происходят при уменьшении b. Рисунок 10 93 Сценарий эволюционного развития в зависимости от интенсивности внешнего, направляющего воздействия I приведен на рисунке 11. Рисунок 11 Видно, что он также имеет характер бифуркационной диаграммы. При уменьшении I в некоторой, вполне определенной точке происходит катастрофа (в смысле математической теории катастроф Тома [13]). В рассматриваемой ситуации катастрофой является складка Уитни [14], и в точке катастрофы система мгновенно теряет свою целостность, прекращает существование, рассыпается. Заключение Проведенный модельный анализ выявил многообразие сценариев эволюционного развития и геометрию каналов эволюции сложных развивающихся систем, в целом, соответствующих парадигме универсального эволюционизма Н.Н. Моисеева [6, 7], и определяющих общесистемные, глобальные закономерности стратегий обеспечения устойчивого развития (sustainable development) и поддержания «устойчивого неравновесия» (sustainability). Список литературы [1] Аллен Р. Математическая экономия. М.: И.Л., 1963. [2] Клейнер Г.Б. Производственные функции: теория, методы применение. М.: Финансы и статистика, 1986. 239 с. [3] Баутин Н.Н., Леонтович Е.А. Методы и приемы качественного исследования динамических систем на плоскости. М.: Наука, 1976. 496 с. [4] Гранберг А.Г. Моделирование социалистической экономики. М.: Экономика. 1988. 307 с. [5] Дилигенский Н.В., Цапенко М.В. Построение и анализ макроэкономических моделей регионального производственно-технологического комплекса / Высшее образование, бизнес, предпринимательство // Материалы Межвузовского сборника научных трудов. Самара. СамГТУ, ПИБ. 2000. с.149-155. [6] Моисеев Н.Н. Человек и ноосфера. М.: Молодая гвардия. 1990. 352 с. [7] Моисеев Н.Н. Универсум. Информация. Общество. М.: Устойчивый мир. 2001. 200 с. 94 [8] Дилигенский Н.В., Ефимов А.П. Сингулярное вырождение и хаотическое поведение однопараметрических эволюционных систем // Проблемы моделирования и управления в сложных системах. Самара. СНЦ РАН, 2002. С. 91-100. [9] Дилигенский Н.В., Ефимов А.П. Модельный анализ самоорганизации, порядка и хаоса в развивающихся системах // Проблемы моделирования и управления в сложных системах. Самара. СНЦ РАН, 2003. С. 115-122. [10] Lorenz E.N. Deterministic nonperiodic flow. J. Atomosferic. Sci. 1963.V.20.W2. p. 130-141. [11] Feigeubaum M.J. Quantitative universality for a class of nonlinear transformations. J.Stat.Phys. 1978.V.19W1. p 25-52. [12] Фейгенбаум М. Универсальное поведение в нелинейных системах. // Успехи физ. наук, 1983. Т141, вып.2. С. 343-374. [13] Thom R. Catastrophe Theory: Its present state and future perspectives. // Dinamical Systems. Warwick, 1974 –Berlin – Heidelberg –New York; Springer – Verlag, 1-75.- p. 366-372. Lecture Notes Math.V.468. [14] Арнольд В.Н. Теория катастроф. М.: Наука, 1990. 128 с. 95