Шарков О.В. Механизмы свободного хода фрикционного типа
advertisement

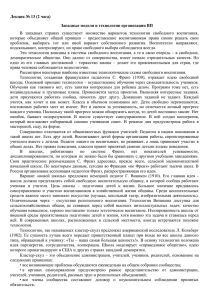
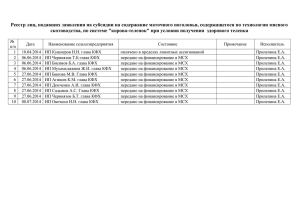
http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 УДК 627.8 МЕХАНИЗМЫ СВОБОДНОГО ХОДА ФРИКЦИОННОГО ТИПА. СОВРЕМЕННОЕ СОСТОЯНИЕ ВОПРОСА О.В. Шарков THE ONE-WAY CLUTCHES OF FRICTION TYPE. QUESTION CURRENT STATE O.V. Sharkov Аннотация. Выполнен анализ конструктивных исполнений механизмов свободного хода фрикционного типа – роликовых и клиновых. Рассмотрены достоинства и недостатки этих механизмов. Показано, что характерным направлением совершенствования современных конструкций механизмов свободного хода является увеличение нагрузочной способности и обеспечение бесконтактности рабочих элементов при свободном ходе. Для повышения нагрузочной способности механизмов свободного хода предлагается увеличивать число заклинивающихся элементов или площадь поверхности их контакта. Однако при этом происходит рост потерь на трение в период свободного хода. Приведены и проанализированы результаты экспериментальных исследований потерь на трение. Ключевые слова: механизм свободного хода; приводы машин; надежность; потери на трение; нагрузочная способность. Abstract. The analysis of designs of one-way clutches of friction type – roller and wedge is made. Merits and demerits of these clutches are considered. It is displayed that a characteristic direction of development of modern designs of one-way clutches is augmentation load capacity and ensuring contactless working elements at a freewheeling. For augmentation of load capacity of oneway clutches it is offered to increase number of wedged elements or the area of a surface of their contact. However thus there is a augmentation of friction losses at a freewheeling. Results of experimental researches of friction losses are considered and analysed. Keywords: one-way clutch; machine drives; reliability; friction losses; load capacity. Одним из ответственных узлов, применяемым в машинах и обеспечивающим автоматическое соединение и разъединение их кинематических цепей, является механизм свободного хода (МСХ). По принципу передачи нагрузки МСХ делятся на: фрикционные; нефрикционные (зацеплением) и комбинированные. Передача нагрузки в МСХ фрикционного типа происходит за счет сил трения, что определяет плавность и бесшумность работы механизмов, но обуславливает зависимость их работоспособности от величин реализуемых коэффициентов трения. Роликовый МСХ одностороннего действия с внутренней звездочкой состоит (рис. 1) из внешней обоймы 1, внутренней звездочки 2 с плоским рабочим профилем и роликов 3, которые поддерживаются в постоянном контакте с рабочими поверхностями обоймы и звездочки подтормаживающими устройствами 4. Для увеличения нагрузочной способности механизма применяют вставки 5 из твердых сплавов (например Т15К6). Ведущим элементом может быть как звездочка, так и внешняя обойма. На рассмотренную конструкцию МСХ разработан ОСТ 27-60-721-84 «Муфты обгонные роликовые». Количество роликов зависит от величины передаваемого момента и назначения механизма. В стандартных роликовых МСХ по ОСТ 27-60-721-84 применяют три или пять роликов; специальные механизмы для гидротрансформаторов и инерционных трансформаторов вращающего момента могут иметь от 20-30 и более роликов [1, 2]. 1 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 Хотя теоретически вероятность одновременного включения всех роликов составляет 99 % [3], на практике это происходит далеко не всегда. Основными преимуществами роликовых МСХ являются: бесшумность в работе; практически мгновенное заклинивание и расклинивание; простота обслуживания и эксплуатации; высокие скорости свободного хода; способность гасить крутильные колебания. Рисунок – 1 Роликовый МСХ одностороннего действия по ОСТ 27-60-721-84 К основным недостаткам роликовых МСХ следует отнести: малые углы заклинивания; необходимость высокой точности изготовления элементов и монтажа механизма; недостаточную долговечность; высокую чувствительность к износу; контакт рабочих элементов при свободном ходе; большую упругую податливость. Малые углы заклинивания. Роликовые МСХ относятся к самозаклинивающимся (самотормозящимся) механизмам, для функционирования которых необходимо выполнять условие α ≤ 2arctg f . Для пары трения «закаленная сталь-сталь» со смазкой коэффициент трения обычно принимают f =0,04-0,05 [4 - 6], следовательно, α =4°30´-5°40´. На практике в зависимости от назначения механизмов рекомендуется принимать α =3-10° [1, 4, 6 - 8], чаще всего используют углы заклинивания α =4-7°. На основании формулы FN = FTP tg (α 2) можно сделать вывод, что в самом благоприятном случае при α =7° нормальная сила будет в 16 раз превышать силу трения. Следовательно, из-за малых углов заклинивания нормальные силы, не участвующие в передаче нагрузки, на порядок превышают силы трения, осуществляющие рабочий процесс. Для исключения проскальзывания ролика при заклинивании угол α должен быть минимально допустимым, а для уменьшения потерь в период свободного хода нужно стремиться к его увеличению. Таким образом, требования оптимальной работы роликового МСХ в периоды свободного хода и заклинивания противоречат друг другу, что затрудняет реализацию принципа выбора угла давления. Необходима высокая точность изготовления роликовых МСХ для обеспечения принципов многопоточности и равномерности распределения нагрузки. Допуск на угол заклинивания при α =7° составляет ±1° для механизмов приводов машин, а в авиационных приводах ±15´ [9]. Разница в углах заклинивания у различных роликов одного механизма не должна превышать ±10´ [1]. Необходимо обеспечить точное центрирование звездочки и внешней обоймы. Несоосность звездочки и обоймы роликовых МСХ приводит как к росту угла заклинивания 2 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 [10], так и к появлению разницы между его величинами для разных роликов одного механизма [11]. Согласно экспериментальным исследованиям [12] роликовых МСХ, увеличение несоосности в интервале 0,128-1,12 мм (в 8,73 раза) приводило к уменьшению их долговечности с 6,7·106 до 6,0·105 циклов включений (в 11,1 раза). Для роликового МСХ с диаметром D =125 мм, спроектированного по машиностроительной нормали МН-3-61, при изменении несоосности в диапазоне 0,01-0,25 мм разница между наибольшим и наименьшим усилиями на плоских рабочих поверхностях звездочки увеличивается с 2,5 до 115 % [12]. По имеющимся данным [10] изменение несоосности с 0,1 до 1,2 мм приводит к росту угла заклинивания в диапазоне α =2-14°. Во избежание перекоса роликов и возникновения чрезмерно высоких напряжений необходимо ограничивать допуски конусности роликов и внутренней поверхности обоймы, а также угла наклона рабочей поверхности звездочки. По данным [11] даже при точном соблюдении допусков размеров для роликовых МСХ отклонение угла заклинивания от расчетной величины составляет 9%, а при изменении размера от центра механизма до плоской рабочей поверхности звездочки на 0,67% величина угла заклинивания будет изменяться в пределах α =7°00´-8°35´. В работе [13] показано, что незначительное изменение радиуса ролика с 20 до 19,1 мм (на 4,5 %) вызывает у роликового МСХ с плоским профилем звездочки значительное изменение угла заклинивания с 3 до 6°47´ (на 53 %). Изменение диаметра внешней обоймы меньшее влияет на величину угла заклинивания, так изменение диаметра в диапазоне 60-61 мм приводит к увеличению угла заклинивания всего с 3°33´30´´ до 3°34´46´´ [10]. Недостаточная долговечность роликовых МСХ обусловлена тем, что ролики контактируют со звездочкой и внешней обоймой по линии, вследствие чего рабочие элементы механизма испытывают высокие контактные напряжения порядка σ H =1300-4500 МПа [6, 13]. Высокая чувствительность к износу роликовых МСХ обусловлена тем, что небольшой износ роликов и звездочки приводит к заметному изменению величины угла заклинивания и нарушения их работоспособности. Как показали экспериментальные исследования [1] в результате износа величина угла заклинивания возрастала с 6° до 9-10°. Наибольший износ наблюдался на поверхности контакта звездочки с роликом, в результате чего образовывались канавки глубиной до 0,06 мм, что приводило к пробуксовке механизма. Влияние износа звездочки на изменение угла заклинивания в 3 раза больше чем износа роликов. Для уменьшения влияния износа внутреннюю звездочку рекомендуют выполнять с рабочим профилем, образованным по окружности, спирали [1, 2, 11, 14] или эвольвенте с переменной эволютой [15, 16]. Однако некоторые авторы [17] отмечают, что работоспособность роликовых МСХ с круговым и спиральным профилем звездочки в условиях колебания нагрузки ниже, чем с прямым рабочим профилем. Контакт рабочих элементов при свободном ходе вызывает постоянное вращение или скольжение роликов, что приводит к потерям на трение и износу. Принцип синхронного и гарантированного разъединения трущихся пар реализуется в роликовых МСХ частично. Как показали экспериментальные исследования роликовых МСХ по ОСТ 27-60-721-84 [1], потери на трение изменяются в пределах TCX =0,1-0,8 Н·м (диаметр обоймы D =52 мм) и TCX =0,02-0,16 Н·м (диаметр обоймы D =100 мм). Роликовые МСХ имели угол заклинивания α =6°, число роликов zP =3 и 5 с диаметрами d P =5,62-6,11 и 12,34-13,21 мм при изменении прижимного усилия в диапазоне 0,15-1,8 Н. Исследования проходили в условиях смазки маслом «И-45А» в диапазоне изменения угловых скоростей элементов МСХ до ωCX =300 с-1. 3 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 Экспериментальные исследования потерь на трение в МСХ с большим числом роликов для гидротрансформаторов [18] показали, что их величина составляет TCX =1-5 Н·м при прижимном усилии 13 Н. При уменьшении прижимного усилия до 1,8 Н она уменьшилась до TCX =0,95 Н·м. Роликовые МСХ имели следующие параметры: диаметр обоймы D =130 мм; число роликов zP =16; диаметр роликов d P =14 мм; угол заклинивания α =6°28´. Исследования проводили при диапазоне угловых скоростей ωCX =20-180 с-1 и смазки маслом «И-30А». Роликовые МСХ с устройствами, обеспечивающими бесконтактность рабочих элементов в период свободного хода, конструктивно сложны и имеют пониженную нагрузочную способность [19 - 22]. Большая упругая податливость определяет низкий КПД и частичное выполнение принципа постоянства передаточного отношения в период заклинивания роликового МСХ. В целях повышения нагрузочной способности роликовых МСХ применяют механизмы с эксцентриковыми роликами (рис. 2) и с групповым расположением цилиндрических роликов (рис. 3). Рисунок 2 – МСХ с эксцентриковыми роликами Рисунок 3 – МСХ с расположением роликов групповым В МСХ с эксцентриковыми роликами повышение нагрузочной способности достигается как за счет большего числа рабочих тел, так и увеличения радиуса кривизны их рабочих поверхностей, приводящей к снижению контактных напряжений [1, 2, 6, 7, 23 - 27]. Несмотря на определенные преимущества, МСХ с эксцентриковыми роликами сохранили основные недостатки механизмов с цилиндрическими роликами. В этих механизмах наблюдается повышенная неравномерность распределения нагрузки между эксцентриковыми роликами, склонность их к провороту и высокая чувствительность к износу [6]. Эксцентриковые ролики требуют высокой точности изготовления и сборки, и соблюдение принципа технологичности обеспечивается только в условиях специализированных производств [1]. Недостаточно точное центрирование обойм может привести к выходу таких механизмов из строя даже в случае высокой точности изготовления их элементов. Потери на трение в МСХ с эксцентриковыми роликами еще выше, т.к. при свободном ходе такие ролики не вращаются и на контактирующих поверхностях реализуется трение скольжение [28]. Причем число эксцентриковых роликов может быть достаточно велико: от 20-30 до 70 и выше. Известны конструкции МСХ с несколькими рядами эксцентриковых роликов, число которых достигает 432 [1, 2, 6, 11]. В МСХ с групповым расположением цилиндрических роликов делается попытка повышения нагрузочной способности путем увеличения числа рабочих тел [1, 6, 11]. Надежная работа таких МСХ гарантирована, если обеспечивается постоянный контакт всех роликов одновременно с обоймой, звездочкой и между собой, чего трудно добиться технологически [1, 6] даже с учетом деформативной приспосабливаемости и износа деталей. Принцип самоприспосабливаемости в этом механизме практически не реализуется. 4 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 В работах [1, 6] отмечается, а в работе [13] теоретически доказана неравномерность распределения нагрузки между роликами такого МСХ, которая составляет 35%. Показаны незначительное повышение нагрузочной способности и необходимость её расчета с учетом только одного ролика. Клиновой МСХ простейшей конструкции с внутренней звездочкой [29] состоит (рис. 4) из внутренней звездочки 1 с криволинейным профилем, внешней обоймы 2, клиньев 3, постоянно поджатых к поверхности обоймы подтормаживающими устройствами 4. Рисунок – 4 Клиновой МСХ с внутренней звездочкой Рассмотренный механизм отличается низкой работоспособностью, т.к. на контактирующих поверхностях клина с внешней обоймой и звездочкой реализуются одинаковые по величине коэффициенты трения, что не обеспечивает достаточной разницы сил трения для надежного заклинивания [14], особенно в условиях частых включений. Клиновой МСХ с внутренней звездочкой эксцентрикового профиля [6, 14] состоит (рис. 5) из внешней обоймы 1, на внутренней цилиндрической поверхности которой выполнена канавка клинового профиля, звездочки 2 эксцентрикового профиля, клиньев 3 и подтормаживающих устройств 4. Рисунок 5 – Клиновой МСХ со звездочкой эксцентрикового профиля 5 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 Основная идея выполнения внешней обоймы с клиновой канавкой, имеющей угол профиля 2β0 , заключается в увеличении силы трения на поверхности контакта клина и обоймы за счет реализации приведенного коэффициента трения. Существуют различные рекомендации для назначения величины угла β0 =20-30°, β0 =15-30°, β0 =8-36° [14, 29]. Такое конструктивное решение позволяет повысить надежность заклинивания механизма, но усложняет технологию изготовления его элементов и приводит к повышенным потерям на трение при свободном ходе. Снизить потери на трение при свободном ходе можно путем отвода клиньев от рабочей поверхности обоймы за счет сил инерции. Клиновой МСХ инерционного действия [30] состоит (рис. 6) из внутренней ведущей звездочки 1 с эксцентриковым рабочим профилем, дисков 2 и 3, свободно размещенных с обеих сторон звездочки, внешней обоймы 4 и заклинивающихся элементов 5, выполненных в виде клиновых сегментов. Клиновые сегменты 5 соединены в подвижную систему через штифты 6 с дисками 2 и 3. Рисунок 6 – Клиновой МСХ инерционного действия При повороте звездочки 1 относительно обоймы 4 против часовой стрелки, при определенном угловом ускорении, клиновые сегменты 5 за счет сил инерции всей подвижной системы отстают в движении от звездочки. При этом клиновые сегменты 5 перемещаются по рабочей поверхности звездочки 1 к обойме 4 и заклинивают между ними. При уменьшении углового ускорения звездочки клиновые сегменты 5 отходят от обоймы 4 и собираются под специальные козырьки звездочки, происходит расклинивание и свободный ход механизма. Предложенная конструктивная схема отличается сложностью изготовления. Кроме того, как показали исследования, козырьки звездочки оказывают тормозящее действие на сегменты при заклинивании, которое может осуществляться только при большом ускорении звездочки. Необходимость повышения долговечности и надежности работы клиновых МСХ привела к созданию конструктивных схем механизмов с дополнительной кинематической связью. Клиновой МСХ с дополнительной кинематической связью (кольцом) [31] состоит (рис. 7) из ведомой внешней обоймы 1, на ступице которой свободно установлен эксцентрик 2 со свободно посаженным дополнительным кольцом 3, кинематически (с помощью зубчатой передачи) связанным с ведомой обоймой. Между кольцом и обоймой расположен клин 4, поджимаемый упругим элементом 5 через опорный клин 6, который удерживается пальцем 7. 6 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 При движении эксцентрика 2 по часовой стрелке детали прижимаются и вращаются как единое целое. При движении в противоположном направлении клин 4 освобождается, обойма 1 совместно с кольцом 3 и эксцентриком 2 движутся независимо, при этом клин 4 оказывается все время поджатым к поверхностям кольца 3 и обоймы 1. Рисунок 7 – Клиновой МСХ с дополнительной кинематической связью К настоящему времени проф. А.А. Благонравовым и другими учеными предложен ряд конструктивных схем таких механизмов [4, 31, 32], которые можно считать наиболее совершенными из клиновых МСХ. Эти механизмы можно отнести к эксцентрико-клиновым. Принципиальным отличием эксцентрико-клиновых МСХ является то, что заклинивающие элементы располагаются между деталями, относительное вращение которых исключено. Вследствие этого они сближаются, сжимая клин, и обеспечивают заклинивание без относительного скольжения рабочих поверхностей. Вместе с тем некоторые авторы считают, что конструкция клинового МСХ с дополнительной кинематической связью не имеет существенных преимуществ перед другими конструктивными схемами [33]. Основным достоинством клиновых МСХ является высокая нагрузочная способность за счет контакта рабочих элементов по поверхности. К основным недостаткам клиновых МСХ следует отнести: неравномерность распределения нагрузки по поверхности контакта; сложность изготовления основных элементов механизма; постоянный контакт клиньев и обоймы в период свободного хода; ограничение по частоте включения механизма и др. Неравномерность распределения нагрузки по поверхности контакта определяется комплексом характерных особенностей клиновых МСХ: рабочие элементы механизма контактируют по криволинейным поверхностям, которые геометрически совпадают только в недеформированном состоянии; положение областей первоначального контакта зависит от точности изготовления элементов и носит случайный характер; между контактирующими поверхностями находятся участки малых начальных зазоров, имеющие порядок упругих деформаций. Впервые задача о неравномерности распределения нагрузки по длине контактирующих элементов была теоретически решена проф. Н.К. Куликовым [29]. Было показано, что для клиновых МСХ со звездочкой прямолинейного профиля изменение 7 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 нагрузки по длине клина носит крайне неравномерный характер по зависимости, близкой к экспоненциальной. В последующем исследования напряженно-деформированного состояния элементов клиновых МСХ различных конструктивных схем, выполненные А.А. Гончаровым, А.И. Скребцовым, В.Г. Карабань, М.Б. Сипливой, Б.А. Голосеевым, А.В. Тарасенко и другими учеными с применением теории упругости, метода конечных и граничных элементов, метода голографической интерферометрии и поляризационно-оптического метода, подтвердили неравномерность распределения нагрузки по их контактирующим поверхностям, которая может изменяться в широких пределах 1,19-6,0. Следует отметить, что неточность изготовления и монтажа клиновых МСХ может приводить и к неравномерному распределению нагрузки между клиньями. Постоянный контакт клиньев и обоймы в период свободного хода необходим для исключения зазора между их рабочими поверхностями, наличие которого приводит к ударам в момент начала заклинивания. Постоянный контакт рабочих поверхностей элементов клиновых МСХ ведёт к износу и значительным потерям на трение при свободном ходе. Дополнительные потери возникают и вследствие возможного колебательного движения клиньев. Конструктивные проработки [4] для клиновых МСХ с диаметром обоймы D =100 мм показали, что при усилии прижимной пружины 100 Н потери мощности в период свободного хода могут составлять до 30 кВт при передаваемой мощности 220-300 кВт. Положение усугубляется еще и тем, что для обеспечения надежного заклинивания нужно обеспечить возможно большую величину коэффициента трения на поверхностях контакта клина с внешней обоймой. Это достигается различными конструктивными и технологическими методами (выполнения клинового сопряжения поверхности контакта, выполненя клина с рифлениями), что приводит к еще большим потерям на трение. Экспериментальные исследования клиновых МСХ с диаметром обоймы D =50 и 200 мм показали, что при длительной работе в период свободного хода нагрев их элементов может превышать 100 °С [34]. Таким образом, контакт рабочих элементов по поверхности, что является преимуществом клиновых МСХ при заклинивании, является их недостатком в период свободного хода. К настоящему времени предложено множество конструктивных решений, которые, по мнению авторов, должны снизить потери свободного хода. Например клиновой МСХ инерционного действия, в котором при достижении определенного углового ускорения клинья отходят от внешней обоймы. Экспериментальные исследования клинового МСХ инерционного действия с диаметром обоймы D =115 мм, в условиях смазки маслом «АК-15» и диапазоне угловых скоростей ωCX =20-180 с-1 , показали, что момент TCX изменяется в пределах 1,2-2,4 Н·м (при вращающейся звездочке и неподвижной обойме) и 0,1-1,5 Н·м (при вращающихся звездочке и внешней обойме с разницей в угловых скоростях ωCX =70 с-1) [30]. Хотя потери свободного хода в клиновом МСХ инерционного действия малы, однако большая величина угла холостого поворота, превосходящая почти в шесть раз аналогичный показатель роликового МСХ при одинаковом рабочем диаметре, ограничивает область их применения. Выполненный анализ показал, что рекомендации по увеличению надежности роликовых и клиновых МСХ не обеспечивают полной гарантии устранения отказов, но усложняют конструкцию и технологию изготовления, что приводит к увеличению стоимости их производства и эксплуатации. Попытки усовершенствовать конструкции роликовых МСХ позволили частично улучшить их отдельные характеристики. Однако, увеличить нагрузочную способность при сохранении габаритных размеров механизмов трудноразрешимая задача, так как 8 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 заклинивающие тела (ролики) контактируют по линии, вследствие чего испытывают высокие контактные напряжения. Увеличение числа роликов требует повышения точности изготовления механизма и приводит к росту момента трения на холостом ходу. Кроме того, по мере износа, контактирующих элементов механизма, нагрузка на ролики распределяется неравномерно, что приводит к их перегрузке. Клиновые МСХ обладают большей нагрузочной способностью по сравнению с роликовыми. Однако их применение так же ограничено из-за ряда существенных недостатков: неравномерности нагружения рабочих элементов и больших потерь на трение при свободном ходе. В современных машинах, для которых характерны значительные величины скоростных параметров, эти недостатки становятся главным препятствием повышения надежности работы приводов с клиновыми МСХ. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1. Мальцев В.Ф. Роликовые механизмы свободного хода. М.: Машиностроение, 1968. 415 с. 2. Ряховский О.А., Иванов С.С. Справочник по муфтам. Л.: Политехника, 1991. 384 с. 3. Лапиените И.И. Вероятностный расчет распределения нагрузки между роликами муфты свободного хода // Труды МВТУ им. Н.Э. Баумана, 1978. № 278. С.151-154. 4. Благонравов А.А. Механические бесступенчатые передачи нефрикционного типа. М.: Машиностроение, 1977.143 с. 5. Крагельский И.В., Виноградова И.Э. Коэффициенты трения. М.: Машгиз, 1962. 212 с. 6. Леонов А.И. Микрохраповые механизмы свободного хода. М.: Машиностроение, 1982. 219 с. 7. Крайнев А.Ф. Идеология конструирования. М.: Машиностроение, 2003. 384 с. 8. Архангельский Г.В., Архангельский А.Г. Роликовые механизмы свободного хода. Одесса: Наука и техника, 2009. 92 с. 9. Авиационные зубчатые передачи и редукторы: справочник / под ред. Э.Б. Вулгакова. М.: Машиностроение, 1981. 374 с. 10. Шейфер Я.Р. Муфты свободного хода // Труды ЦИАМ. М.: Оборониздат, 1944. № 65. 15 с. 11. Поляков В.С., Барбаш И.Д. Муфты. Конструкции и расчет. Л.: Машиностроение, 1973. 336 с. 12. Папченко А.И. Исследование точности изготовления и монтажа роликовых механизмов свободного хода: автореф. дисс... канд. техн. наук: 161 – Машиноведение и детали машин; Челябинск: ЧПИ им Ленинского комсомола, 1969. 27 с. 13. Kollmann K. Beitrag zur konstruktion und berecnhuhg von uberhol-kupplungen // Konstruktion, 1957. H.7. S. 254 – 259. 14. Пилипенко М.Н. Механизмы свободного хода. Л.: Машиностроение, 1966. 287 с. 15. Ивасышин Г.С. Применение эвольвенты с переменной эволютой для повышения работоспособности сопряжений в муфтах свободного хода, зубчатых передачах и спиральнореечных механизмах // Трение и смазка в машинах и механизмах, 2009. № 6. С. 29-34. 16. Серёгин А.А. Модернизация роликовых механизмов свободного хода // Ремонт, восстановление, модернизация, 2008. № 12. С. 7-10. 17. Нониева Т.Г. К вопросу о применении обгонных муфт в сельскохозяйственных машинах // Тракторы и сельскохозяйственные машины, 1962. № 9. С. 28-31. 18. Сорока И.Ф., Тарнопольский В.М., Бурцев Е.Т. Потери на трение и износ в механизмах свободного хода комплексных гидротрансформаторов // Детали машин: республиканский науч.-техн. сборник. Киев: Техника, 1975. № 20. С.68-71. 9 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 19. Бурцев Е.Т. Исследование и проектирование бесконтактных механизмов свободного хода: автореф. дисс... канд. техн. наук: 05.02.02 – Машиноведение и детали машин. Одесса: ОПИ, 1979. 16 с. 20. Мальцев В.Ф., Бурцев Е.Т. Эксцентриковые роликовые механизмы свободного хода с уменьшенным сопротивлением свободного хода // Вестник машиностроения, 1977. № 1. С. 26-29. 21. Мальцев В.Ф., Сорока И.Ф., Бурцев Е.Т. Бесконтактные механизмы свободного хода с цилиндрическими роликами // Станки и инструмент, 1975. № 5. С. 14-16. 22. Новиков В.А., Раджапов А.К. Расчет геометрических параметров механизмов свободного хода с некруглыми телами заклинивания // Вестник машиностроения, 1977. № 9. С. 25-30. 23. Баженов С.П. Исследование вопросов динамики пластинчатых механизмов свободного хода: автореф. дисс... канд. техн. наук: 05.02.02–Машиноведение и детали машин. Челябинск: ЧПИ, 1965. 18 с. 24. Камалов С.П. Анализ и синтез бессепараторных муфт свободного хода с некруглыми заклинивающимися телами: автореф. дисс... канд. техн. наук: 05.02.18 – Теория механизмов и машин. Ташкент: ТГТУ им. А.Р. Беруни, 1991. 21 с. 25. Раджапов А.К. Синтез и анализ муфт свободного хода с некруглыми заклинивающимися телами: дисс... канд. техн. наук: 05.02.18 – Теория механизмов и машин. Ташкент, 1980. 202 с. 26. Саптеев В.К. Исследование рычажно-эксцентриковых механизмов свободного хода: автореф. дисс… канд. техн. наук: 05.02.02 – Машиноведение и детали машин. М.: МВТУ им Н.Э. Баумана, 1980. – 16 с. 27. Orthwein W.C. Clutches and brakes: design and selection. New York: Marcel Dekker, 2004. 330 p. 28. Шарков О.В. Анализ потерь на трение в период свободного хода в механизмах свободного хода // Детали машин и трибология: межвузовский сб. науч. тр. Калининград: КГТУ, 2005. С. 156 – 173. 29. Куликов Н.К. Клиновые механизмы свободного хода // Труды НАМИ. М.: Машгиз, 1954. Вып. 75. 67 с. 30. Тарасенко А.В. Разработка конструкции и исследование работы сегментной инерционной обгонной муфты: дисс... канд. техн. наук: 161 – Машиноведение и детали машин. Минск: Бел. политех. ин-т, 1966. 262 с. 31. Кропп А.Е. Приводы машин с импульсными вариаторами. М.: Машиностроение, 1988. 144 с. 32. Пылаев Б.В. Эксцентриковая высокомоментная обгонная муфта // Вестник машиностроения, 2003. № 9. С. 9-12. 33. Горин М.П., Мальцев В.Ф. О заклинивании клинового механизма свободного хода с кинематической связью // VI Всесоюзная науч.-техн. конфер. по управляемым и автоматическим механическим приводам и передачам гибкой связью: сб. тез. докл. Одесса, 1980. С. 187-188. 34. Кузьмин А.В., Анохин В.М. Температурный режим клиновых механизмов свободного хода при свободном ходе // III Всесоюзная науч. конфер. по инерционноимпульсным механизмам, приводам и устройствам: сб. тез. докл. Челябинск, 1982. С. 32-33. 10 http://vestnik-nauki.ru/ Вестник науки и образования Северо-Запада России 2015, Т.1, №1 ИНФОРМАЦИЯ ОБ АВТОРЕ Шарков Олег Васильевич ФГАОУ ВПО «Балтийский федеральный университет им. И.Канта», г. Калининград, Россия, доктор технических наук, профессор кафедры технологии транспортных процессов и сервиса, ФГБОУ ВПО «Калининградский государственный технический университет», г. Калининград, Россия, профессор кафедры теории механизмов и машин и деталей машин, действительный член Российской инженерной академии, E-mail: o_sharkov@mail.ru Sharkov Oleg Vasil'yevich FSAEI HPE «Immanuel Kant Baltic Federal University», Kaliningrad, Russia, Doctor of Technical Science, Professor of the Transport Processes and Service Technology Department, FSEI HPE «Kaliningrad State Technical University», Kaliningrad, Russia, Doctor of Technical Science, Professor of the Theory of Mechanisms and Machines and Machine Parts Department, Member of Russian Engineering Academy, E-mail: o_sharkov@mail.ru Корреспондентский почтовый адрес и телефон для контактов с авторами статьи: 236029, Калининград, ул. Озерова д.57, БФУ им. И. Канта, Институт транспорта и технического сервиса, каб. 205. Шарков О.В., тел. 8(4012)59-55-85 236022, Россия, Калининград, Советский пр., 1, КГТУ, кафедра ТММ и ДМ, каб. 309. Шарков О.В. 8(4012)99-53-45 11