Квалификационные требования КТ
advertisement

Межгосударственный Авиационный Комитет
Авиационный Регистр
Квалификационные требования
КТ-8055
Требования к индикаторам на лобовом стекле
1
ОГЛАВЛЕНИЕ
1. НАЗНАЧЕНИЕ .................................................................................................................................................. 6
2. СПРАВОЧНАЯ ИНФОРМАЦИЯ .................................................................................................................... 6
2..1 Применяемые Документы .............................................................................................................................. 6
2.2
Связанные Публикации ................................................................................................................................ 8
0
2.3 Определения ..................................................................................................................................................... 10
3.
ОБЩИЕ ТРЕБОВАНИЯ ................................................................................................................................ 10
3.1 Материалы ....................................................................................................................................................... 10
3.2 Производство .................................................................................................................................................. 11
3.3 Совместимость Компонентов ........................................................................................................................ 11
3.4 Взаимозаменяемость ...................................................................................................................................... 11
3.5 Доступность средств управления................................................................................................................... 11
3.6 Возможность самоконтроля ............................................................................................................................. 11
3.7 Эффект контроля ............................................................................................................................................... 11
3.8 Индикация отказов ........................................................................................................................................... 11
3.9. Индикация режимов работы ........................................................................................................................... 12
3.10. Идентификация (Маркировка) ..................................................................................................................... 12
3.11. Изображение (Дисплей) ................................................................................................................................ 12
3.12. Устойчивость к пыли и влажности ............................................................................................................. 13
3.13. Защита системы от механических повреждений ....................................................................................... 13
3.14. Самозатухаемость ......................................................................................................................................... 13
3.15. Дополнительный нагрев/охлаждение ......................................................................................................... 13
3.16. Встроенное освещение ................................................................................................................................. 13
3.17. Система управления ..................................................................................................................................... 13
3.18. Визуальные помехи ...................................................................................................................................... 13
4. МИНИМАЛЬНЫЕ ТРЕБОВАНИЯ К ИЗОБРАЖЕНИЮ ПРИ СТАНДАРТНЫХ УСЛОВИЯХ ..... 14
4.1 Функции оборудования и механические операции ....................................................................................... 14
4.2 Характеристики дисплея ................................................................................................................................. 14
4.3 Фотометрические характеристики HUD ....................................................................................................... 18
4.4 Конструктивный блок HUD ............................................................................................................................ 21
4.5 Характеристики растрового изображения (визуальное отображение информации) ................................. 22
5. МИНИМАЛЬНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ В УСЛОВИЯХ ВВФ ............................. 24
5.1 Требования......................................................................................................................................................... 24
5.2 Определение условий ........................................................................................................................................ 25
5.3 Условия испытаний .......................................................................................................................................... 25
5.4 Испытания на воздействие температуры и высоты ...................................................................................... 25
5.5 Испытание на изменение температуры (Раздел 5.0, DO-160D/ED-14D) ..................................................... 26
5.6 Испытание на воздействие влажности (Раздел 6.0, DO-160D/ED-14D) ..................................................... 26
5.7 Испытание на ударные нагрузки (Раздел 7.0, DO-160D/ED-14D) ............................................................. 26
5.8 Испытание на вибрацию (Раздел 8.0, DO-160D/ED-14D) ............................................................................ 26
5.9 Испытание на взрывобезопасность (Когда требуется) (Раздел 9.0, DO-160D/ED-14D) ........................... 26
5.10 Испытание на водонепроницаемость (Когда требуется) (Раздел 10.0, DO-160D/ED-14D) ................. 27
2
5.11 Испытание на воздействие загрязняющих жидкостей (Когда требуется) (Раздел 11.0, DO-160D/ED14D) 27
5.12 Испытание на воздействие песка и пыли (Раздел 12.0, DO-160D/ED-14D) .......................................... 27
5.13 Испытание на грибоустойчивость (Раздел 13.0, DO-160D/ED-14D) ..................................................... 27
5.14 Испытание на воздействие соленого тумана (Раздел 14.0, DO-160D/ED-14D) ..................................... 27
5.15 Испытание на магнитное воздействие (Раздел 15.0, DO-160D/ED-14D) ................................................ 27
5.16 Испытание на электропитание (Раздел 16.0, DO-160D/ED-14D) ............................................................. 27
5.17 Испытание на воздействие импульсов напряжения (Раздел 17.0, DO-160D/ED-14D) .......................... 27
5.18 Испытание на восприимчивость к помехам звуковых частот, поступающих через входы
электропитания (Раздел 18.0, DO-160D/ED-14D) ............................................................................................... 28
5.19 Испытание на восприимчивость к помехам индукции, воздействующим через провода линий связи и
корпуса оборудования (Раздел 19.0, DO-160D/ED-14D) .................................................................................... 28
5.20 Испытание на радиочастотную восприимчивость (Радиоизлучение и проводимость) (Раздел 20.0, DO160D/ED-14D)
28
5.21 Испытание на излучение радиочастотной энергии (Раздел 21.0, DO-160D/ED-14D) .................... 28
5.22 Испытание на восприимчивость к переходным процессам, вызванным молнией (Раздел 22.0,
DO-160D/ED-14D) .................................................................................................................................................. 28
5.23 Испытание на прямое воздействие молнии (Когда требуется) (Раздел 23.0, DO-160D/ED-14D) .. 28
5.24 Испытание на воздействие обледенения (Раздел 24.0, DO-160D/ED-14D) ...................................... 28
5.25 Испытание на воздействие электростатического разряда (HIRF) (Раздел 20.0, DO-160D/ED-14D)
29
5.26 Воздействие Рентгеновского излучения ................................................................................................ 29
5.27 Воздействие ультрафиолетового излучения ......................................................................................... 29
5.28 Запотевание (Только герметично запечатанные или просушенные блоки дисплеев) ............... 29
5.29 Воздействие тепловых ударов ............................................................................................................... 30
6.
МЕТОДИКА ИСПЫТАНИЙ ......................................................................................................................... 30
1.1 Условия испытаний........................................................................................................................................... 30
1.2 Внешние условия испытаний........................................................................................................................... 30
1.3 Условия электропитания .................................................................................................................................. 30
7.
ГЛОССАРИЙ СРОКОВ{ТЕРМИНОВ;УСЛОВИЙ} ................................................................................... 30
7.1 Окружающий Фон ............................................................................................................................................ 30
7.2 Неоднозначная или Ошибочная Информация .............................................................................................. 30
7.3 Комбайнер ......................................................................................................................................................... 31
7.4 Конформный ..................................................................................................................................................... 31
7.5 Коэффициент контрастности .......................................................................................................................... 31
7.6 Желательное положение глаза ........................................................................................................................ 31
7.7 Поле обзора (FOV) ........................................................................................................................................... 31
7.8 Нежелательное мерцание ............................................................................................................................... 32
7.9. Сгенерированный Фон ................................................................................................................................. 32
7.10 Вычислитель HUD, Генератор символов HUD, или Процессор HUD ...................................................... 32
7.11 Панель управления HUD (HCP) ................................................................................................................... 32
7.12 Опорная точка обзора HUD ......................................................................................................................... 33
7.13 Зона видимости HUD ................................................................................................................................... 33
7.14 Система HUD ................................................................................................................................................ 33
7.15 Отраслевые (Промышленные) стандарты .................................................................................................. 33
7.16 Дрожание........................................................................................................................................................ 33
7.17 Ширина Линии .............................................................................................................................................. 33
7.18 Яркость .......................................................................................................................................................... 33
7.19 Минимальные технические требования...................................................................................................... 33
7.20 Неконформный ............................................................................................................................................. 33
7.21 Режимы работы ............................................................................................................................................. 34
7.22 Оптическая бесконечность .......................................................................................................................... 34
3
7.23 Ошибки параллакса ...................................................................................................................................... 34
7.23.1
Конвергенция ......................................................................................................................................... 34
7.23.2
Дивергенция .......................................................................................................................................... 34
7.23.3
Дипвергенция ......................................................................................................................................... 34
7.24 Фотопический ............................................................................................................................................... 34
7.25 Основной пилотажный индикатор .............................................................................................................. 34
7.26 Растровая разрешающая способность ........................................................................................................ 35
7.27 Избыточность ................................................................................................................................................ 35
7.28 Рефлексивный или голографический HUD................................................................................................. 35
7.29 Рефрактивный HUD...................................................................................................................................... 35
7.30 Работоспособность ...................................................................................................................................... 35
7.31 Отказоустойчивость .................................................................................................................................... 35
7.32 Коэффициент пропускания Комбайнера .................................................................................................... 35
ПРИЛОЖЕНИЕ А. ТИПЫ КОЛЛИМАТОРНЫХ ИНДИКАТОРОВ ............................................................... 36
4
1. НАЗНАЧЕНИЕ
Настоящие квалификационные требования определяют минимальные требования к
характеристикам бортовых бинокулярных коллиматорных индикаторов на лобовом стекле
(Head-Up Display) для воздушных судов с фиксированным крылом. Квалификационные
требования не распространяются на системы получения видео информации, очки, нашлемные
индикаторы, и символику, которая должна быть отображена на HUD. Настоящий документ
разработан на основе стандарта SAE AS8055 «Minimum Performance for Airborne Head Up
Display. По сравнению с документов
М SAE в текст КТ внесены следующие изменения:
- исключены некоторые требования общего характера. Исключенные требования указаны в
тексте курсивом;
- вместо некоторых документов Федеральной Авиационной Администрации США указаны
соответствующие аналоги, используемые в государствах- членах Минского соглашения.
2. СПРАВОЧНАЯ ИНФОРМАЦИЯ:
В разделе приведены документы, использованные группой SAE при разработке документа
AS 8055. На документы, перечисленные в 2.1, даются ссылки, чтобы лучше ориентироваться
в настоящих КТ. Документы, перечисленные в 2.2, приводятся исключительно в
информационных целях и не являются частью требований этого документа.
2.1 Применяемые Документы:
Следующие публикации являются частью этого документа до степени, определенной здесь.
Должен применяться последний выпуск публикаций SAE. В случае конфликта между
текстом этого документа и справочной информации, процитированной здесь, имеет
приоритет текст этого документа. Ничто в этом документе, однако, не заменяет
применимые законы и инструкции, если определенное освобождение не было получено.
2.1.1 Публикации SAE: Доступный от SAE, 400 Commonwealth Drive, Warrendale, Пенсильвания
15096-0001.
2.1.2 Регулирующие Публикации:
Документы "FAA AC-()" доступны от американского Министерства транспорта, Раздел
Использования и Хранения, М. 443.2, Вашингтон, округ Колумбия 20590.
Документы "FAR" могут быть куплены от Правительственной Типографии Вашингтон, округ
Колумбия 20402.
Документы "TSO" доступны от Aircraft Engineering Division (AIR-100), Aircraft Certification
Service, Federal Aviation Administration, 800 Авеню Независимости SW, Вашингтон, округ
Колумбия 20591.
Документы "JAR" могут быть куплены от Civil Aviation Authority, Служба печати и
публикаций, Greville House, 37 Gratton Road, Челтнема, Глостершира. GL50 2BN, Англия.
5
FAA AC 20-136
Защита электрических/электронных систем самолета
от косвенного воздействия молнии
FAA AC 25-11
Электронные Системы отображения информации для
Самолетов Транспортной Категории
FAA 25.1309-1A
Анализ Проектирования систем (ПРИМЕЧАНИЕ:
Вторая редакция (revision B) в процессе подготовки)
2.1.3
FAR 2X.562
Динамические Состояния при вынужденной посадке
FAR 2X.853
Требования к интерьеру кабины
FAR 25.869
Системы защиты от пожара
FAR 2X.1309
Оборудование, Системы, и Установка
23.1309; 25.1309; 27.1309; 29.1309
Публикации RTCA/EUROCAE: Доступный от RTCA, Inc, 1140 Авеню Штата Коннектикут,
Набор 1020, Вашингтон, округ Колумбия 20036.
RTCA DO-160D/EUROCAE ED-14D Внешние воздействующие факторы (ВВФ) и Тестовые
Процедуры для Бортового Оборудования
2.1.4 Публикации CIE (Международная Комиссия de PEclairage): Доступны вне США от Бюро
Сентраль Де Ла CIE; 52, Бульвар Malesherbes, 75008 Париж, Франция. И в США от
Национального комитета Соединенных Штатов CIE, Радиометрического Физического
Департамента, Национальное Бюро Стандартов, Вашингтон, округ Колумбия 20234.
2.1.5 Электронная Ассоциация Промышленности (EIA) Публикации: Доступны от Электронной
Ассоциации Промышленности, 2500 Бульваров Wilson, Arlington, VA 22201.
EIA - 503-A
Рекомендованная Практика для Измерения X-радиации от
телевизионных трубок Direct-View
2.2 Связанные Публикации:
Следующие публикации представлены только в информационных целях и не являются
необходимой частью этого SAE Аэросмического Технического Отчета.
2.2.1 Публикации SAE: Доступны от SAE, 400 Commonwealth Drive, Warrendale, Пенсильвания
15096-0001.
ARP1161 Освещение рабочего места экипажа - Коммерческая Авиация
ARP1782 Фотометрические и Колориметрические Процедуры Измерения для Direct View
Дисплеев с катодно-лучевой трубкой
ARP1874 Требования по разработке для Дисплеев с катодно-лучевой трубкой для Части 25
Транспортных Самолетов
ARP4032 Требования по эргономике в отношении применяемых цветов для Бортовых
Электронных Дисплеев
ARP4101 Общий базовый документ, Планировка кабины экипажа и ее оснащение
ARP4102 Общий базовый документ, Панели Кабины Экипажа, Органы Управления
и Дисплеи
ARP4102/7 Электронные Дисплеи
ARP4102/8 Кабина экипажа, Коллиматорные индикаторы
ARP4103 Освещение Кабины Экипажа и Графический Интерфейс
ARP4105 Условные обозначения и Сокращения для Использования в Кабине экипажа
ARP4155 Методология Разработки Интерфейса Человек-Машина для Систем
Интегрированного Отображения Информации
(ПРИМЕЧАНИЕ: Пересмотр A в процессе),
ARP4256 Проектные Требования для ЖК-Дисплеев для Части 25 Транспортная
Авиация
ARP4260 Фотометрические и Колориметрические Процедуры Измерения для
Бортовых Индикаторных панелей системы Direct View (Когда Одобрено)
ARP4654 Обзор Символики HUD
ARP4742 Характеристики Дисплея HUD, Используемого в Гражданской
Транспортной авиации (ПРОЕКТ)
AS8034 Минимальные требования к рабочим характеристикам Бортовых
Многофункциональных Электронных Дисплеев
6
ARP5287 Процедуры Оптических Измерений для Бортовых Коллиматорных
индикаторов
2.2.2 Регулирующие Публикации: документы "FAA AC-()" доступны от американского
Министерства транспорта, Департамента Использования и Хранения, М. 443.2, Вашингтон,
округ Колумбия 20590.
Документы "TAR" могут быть куплены от Правительственной Типографии Вашингтон,
округ Колумбия 20402.
Документы "TSO" доступны от Aircraft Engineering Division (AIR-100), Aircraft Certification
Service, Federal Aviation Administration, 800 Авеню Независимости SW, Вашингтон, округ
Колумбия 20591.
Документы "JAR" могут быть куплены от Civil Aviation Authority, Служб Печати и
Публикации, Greville House, 37 Gratton Road, Челтнема, Глостершира. GL50 2BN,
Англия.
FAA AC 20-57A
Системы Автоматической Посадки
FAA AC 23.1309-1B
Оборудование, Системы, и Инсталляции в Самолете части 23
FAA AC 20-11 OH
Индекс Инструкций о применении технических стандартов
FAA AC 23.1311-1
Инсталляция Электронных Систем Прибора Дисплея в
Самолетах части 23
FAA AC 25.773.1
Рекомендации к проектированию кабины пилота
FAA AC 29.773-1
Вид Кабины Пилота
FAAAC120-28C
Критерии для Одобрения Категории III Погодных
Минимумов для Взлета, Посадки и Руления
(ПРИМЕЧАНИЕ: Этот документ готовится к Пересмотру D и
может включить элементы 20-57A AC),
FAA AC 120-29
Критерии для Одобрения Категории I и Категории II
Минимумов Посадки для Операций FAR 121
(ПРИМЕЧАНИЕ: Этот документ готовится к Пересмотру A)
FAR Part 23
Стандарты Полётопригодности: Самолетов обычного типа,
Общего Назначения, Акробатических, и Местных воздушных
линий
FAR Part 25/JAR Part 25 Стандарты Полётопригодности: Категория Транспортные
Самолеты
FAR Part 27
Стандарты Полётопригодности: Категория Транспортные
Вертолеты
FAR Part 29
Стандарты Полётопригодности: Категория Транспортные
Вертолеты
FAR 25.581
Молниезащита
FAR 2X.773
Вид Кабины Летчика
23.773; 25.773; 27.773; 29.773
FAR2X.1301
Функции и Установка
23.1301; 25.1301; 27.1301; 29.1301
FAR2X.1303
Пилотажные и Навигационные Приборы
23.1303; 25.1303; 27.1303; 29.1303
FAR 23.1311
Системы электронной индикации
FAR 25.1316
Системы Молниезащиты
FAR 2X. 1321
Компоновка приборов и Видимость
23.1321; 25.1321; 27.1321; 29.1321
JAR-HUDS-901
Категория 3 Работа с Коллиматорным индикатором
JAR-HUDS-902
Категория 2 Работа с Коллиматорным индикатором
JAR-HUDS-903
Коллиматорные индикаторы
TSO-C113
7
Бортовые
Многофункциональные Электронные Дисплеи
2.2.3 Публикации RTCA/EUROCAE: Доступны от RTCA, Inc, 1140 Авеню Штата
Коннектикут, Набор 1020, Вашингтон, округ Колумбия 20036.
RTCA DO-178B/EUROCAE ED-12B Рекомендации по Разработке Программного
обеспечения в Бортовых системах и Сетрификации оборудования
2.2.4
CIE (Международной Комиссии de I'Eclairage) Публикации: Доступны вне США от
Бюро Сентраль Де Ла CIE; 52, Бульвар Malesherbes, 75008 Париже, Франция и в
США от Национального комитета Соединенных Штатов Международной Комиссии
De L'Eclairage, Радиометрического Физического Департамента, Национального Бюро
Стандартов, Вашингтон, округ Колумбия 20234.
Добавление № 2 к Публикации CIE № 15 Рекомендации на Однородные
Дифференциальные уравнения Цвета, Цветовые пространства - Психометрические
Цветовые Условия
2.2.5
Американские Правительственные Публикации: документы "MIL" можно заказать
по ФАКСУ: (215) 697-1462, оплата по кредитной карте. Квитанцию или денежный
перевод нужно отправить по почте на адрес: DODSSP, Building 4D - Обслуживание
Клиентов, 700 Авеню Robbins, Филадельфия, Пенсильвания, 19111-5094. Оплата
должна быть включена в заказ.
MIL-HDBK-87213 Руководство Вооруженных сил: Электрические/Оптические
Бортовые Дисплеи
MIL-STD-1787B Стандарт Вооруженных сил: Символика Дисплея Самолета
MIL-STD-1295A Стандарт Вооруженных сил: Критерии Эргономических Факторов
для Проектирования Вертолетной Кабины и Электрооптическая (Отмененная)
Символики Дисплея
MIL-STD-810 Стандарт Вооруженных сил: Экологические Испытательные Методы и
Рекомендации для Разработки
2.2.6
Другие Публикации:
Эргономические Факторы в Дизайне Коллиматорных индикаторов: "Книга HUD";
SOAR CSERIAC 92-2 мая 1992
2.3 Определения:
Определения, используемые в этом документе, как отмечалось, должны быть
приведены в Глоссарии Терминов, см. Раздел 7. Слово "должно" используется, чтобы
выразить необходимое требование. Должно выполняться полное соответствие
требованиям, без отклонений. Слово "следует" используется, чтобы выразить
рекомендацию. Отклонение от указанной рекомендации может потребовать
обоснования.
3 ОБЩИЕ ТРЕБОВАНИЯ
3.1 Используемые материалы должны быть надлежащего качества, которое
подтверждено опытом и/или тестами на соответствие использованию в
авиационной технике.
3.2 Производство должно соответствовать авиационным требованиям в части
изготовления электромеханических и электронных изделий.
3.3 Совместимость компонентов: если компоненты системы отображения в целом
подходят, но требуют дополнительной подгонки или согласования с другими
компонентами для нормальной работы, это следует указать таким образом,
чтобы убедительно показывалось соответствие требованиям этого документа.
8
3.4 Взаимозаменяемость: компоненты системы отображения, имеющее одинаковое
обозначение (P/N) должны быть полностью взаимозаменяемы.
3.5 Доступность органов управления.
Органы управления, которые не должны быть использоваться в полете, не должны
быть легко доступны пилотам..
Размещение органов управления, используемых в полете, должно быть таким, чтобы
они были хорошо видны, легко идентифицируемы и могли быть использованы
пилотом с его нормального рабочего положения. Размещение и/или тип органов
управления должны исключать их непреднамеренное использование.
3.6 Встроенный контроль.
Если оборудование содержит интегральные средства для выполнения предполетного
контроля и/или контроля во время полета при работе системы с другим оборудованием
самолета, такой контроль не должен негативно влиять на сопряженные системы.
Если во время полета необходимо выполнять контроль, который влияет на работу
сопряженного оборудования, должны быть предусмотрены соответствующие
средства оповещения пилота или другого члена экипажа о работе этого режима.
3.7 Эффект контроля
Использование предусмотренных режимов сервисного обслуживания не должно
приводить к состоянию, которое может помещать последующему использованию
Изделия.
3.8 Индикация отказов.
Должны быть обеспечены средства индикации отказа или неисправности для
соответствующего члена экипажа, за исключением случая, если отказ очевиден,
например, потеря изображения на дисплее.
3.8.1 Индикация потери питания. Должны обеспечиваться средства индикации,
указывающие, когда электропитание (напряжение и/или ток) не обеспечеивает
надлежащую работу оборудования.
3.8.2 Обеспечение выхода из строя без опасных последствий.
Никакой единичный отказ или сбой системы HUD не должен приводить к
возникновению опасных состояний в оборудовании, с которым связана система.
3.9 Индикация режимов работы:
Если система HUD имеет больше одного режима работы, каждый режим должен
быть идентифицирован системой HUD и быть доступен для обоих пилотов.
3.10 Идентификация (маркировка);
Следующая информация должна быть четко нанесена на шильдике оборудования
или приводиться в паспорте изделия
a. Название оборудования;
b. Децимальный номер, устанавливаемый изготовителем;
c. Серийный номер изделия
d. SAE AS8055 или эквивалентные требования, по которым сертифицировалось
оборудование;
e. Имя изготовителя или торговая марка;
9
f. Вес с точностью 0.05 кг (десятая часть фунта)
g. Категории ВВФ по DO-160D/ED-14D
3.11 Изображение (Дисплей).
Отображаемая информация должна функционально удовлетворять следующим
требованиям :
3.11.1 Различимость. Должны быть обеспечены меры для предотвращения
затемнения или неясности при отображении критической информации.
3.11.2 Критическая Информация. Должны обеспечиваться меры, для
информирования
пилота, в случае, если критическая информация, при
нормальной работе отображаемая на HUD, будет неверна. См. AC 25-11 параграф
4.a.
3.11.3 Индикация достижения предельных значений. Должны обеспечиваться
меры для
идентификации ситуации, когда отображаемая критическая
информация превышает свои функциональные пределы, установленные в
соответствии с функциями дисплея.
3.11.4 Читаемость шкал. Изображение шкал, градуировка, и оцифровка должны
отвечать требованиям по точности считывания информации и требованиям
динамического диапазона.
3.11.5 Неоднозначность информации. Должны обеспечиваться меры для
предотвращения неоднозначной индикации в пределах диапазона работы
оборудования.
3.12 Устойчивость к пыли и к влажности. Оптическая часть должна быть
спроектирована таким образом, чтобы не допускать загрязнения внутренней
поверхности линзы пылью или появления на ней конденсата во всех режимах
работы и в процессе испытаний, включая испытания на пониженную температуру
и туман морской, описанные в документе КТ-160D.
3.13 Защита системы от механических повреждений. В пределах ВВФ, описанных
в этом документе, система HUD должна быть спроектирована таким образом,
чтобы не причинить вреда экипажу при механических отказах (таких как,
например, взрыв ЭЛТ). Комбайнер должен быть спроектирован таким образом,
чтобы, когда он находится в походном положении, он не мог бы быть
непреднамеренно приведенным в рабочее положение.
3.14 Самозатухаемость. За исключением небольших частей конструкции
{например, застежек, колец, кнопок, изоляций, небольших электронных
компонентов), которые не могут способствовать значительному распространению
огня, все используемые материалы должны быть самозатухающими в соответствии
с требованиями АП-25 п.п.25.853, 25.869.
3.15 Дополнительный обогрев/охлаждение В случаях, когда требуется
дополнительный обогрев или охлаждение оборудования для того, чтобы
гарантировать соответствие данному стандарту, определить эти требования должен
производитель. Если потеря дополнительного обогрева или охлаждения в течение
штатного режима работы системы может привести к отображению вводящей в
заблуждение информации, должен быть реализован мониторинг системы обогрева
или охлаждения, и выдаваться сигнализация экипажу об отказе этих систем.
10
3.16 Встроенный подсвет: При наличии встроенного подсвета, все индексы в
пределах требуемой зоны просмотра должны быть легко различимы в условиях
нормального освещения кабины.
3.17 Система управления. Если HUD отображает директорную информацию, то не
должно происходить незатухающих колебаний, изменений пространственного
положения, приводящих к чрезмерной нагрузке на экипаж, в результате изменения
режима работы, напряжения питания, или любого другого внешнего возмущения,
которое может происходить в нормальном режиме работы,.
3.18 Визуальные помехи. HUD не должен иметь электронные приводы или
элементы конструкции, которые могут попадать в поле обзора, и мешать
восприятию внешней обстановки, приводя к опасным ситуациям.
4 МИНИМАЛЬНЫЕ ТРЕБОВАНИЯ К ИЗОБРАЖЕНИЮ ПРИ
СТАНДАРТНЫХ УСЛОВИЯХ
Производитель должен провести соответствующие тесты для подтверждения
соответствия этому стандарту. Применимые условия проведения тестов даны в DO160/ED-14D. Применимые процедуры измерения для HUD даны в ARP5287
“Оптические измерительные процедуры для авиационных индикаторов на лобовом
стекле”.
4.1 Функции оборудования
Информационное содержание и формат каждого режима работы HUD должен быть
разработан таким образом, чтобы отвечать функциональному назначению этого
режима. Не должно быть потребности в дополнительных механических устройствах
для работы в нештатных режимах или для обеспечения удовлетворительной работы.
4.2 Характеристики дисплея
Следующие требования применимы к HUD в его рабочей позиции и при любых
условиях освещения кабины с точки удаления зрачка наблюдателя (без учета ошибок
датчика изображения). Последующие подпараграфы не учитывают влияние ошибок и
шума, обусловленных датчиком изображения.
4.2.1 Углы обзора HUD. Существует 4 определенные характеристики поля обзора
(field-of-view FOV), которые должны быть определены разработчиком, для того,
чтобы полностью описать характеристики углового пространства, внутри которого
виртуальное изображение было бы видимым. Эти характеристики FOV:
Полное FOV, Мгновенное FOV (IFOV), Бинокулярное перекрывающееся FOV, Мгновенное монокулярное FOV. Эти параметры должны быть определены
производителем и должны соответствовать целевому назначению HUD.
Горизонтальное и вертикальное перемещения положения головы не должно
приводить к повышению нагрузки на пилота или вызывать дискомфорт.
11
4.2.2 Зона видимости HUD – Это объем, определяемый производителем, в пределах
которого сохраняются все оптические характеристики дисплея. Со всех точек зоны
видимости HUD должно быть видимым минимальное монокулярное FOV.
Минимальный размер зоны видимости HUD должно быть:
- по горизонтали: 76.2 мм (3 дюйма)
- по вертикали: 50.8 мм (2 дюйма)
- по глубине: 101.6 мм (4 дюйма).
Боковые и вертикальные размеры определяют необходимый диапазон перемещений
монокулярного инструмента с входной апертурой 6.35 мм (0.25 дюйма). Продольный
размер зоны видимости HUD представляет собой общее расстояние (ближе-дальше),
вдоль которого выполняются требования этого стандарта. Размер зоны видимости
должен быть максимально согласован с другими ограничениями кабины. Размер
зоны видимости может, в конечном счете, ограничить размещение символики в
некоторых режимах. По возможности, опорная точка обзора HUD должна совпадать
положением глаза в кабине. Как минимум, положение глаз должно попадать в зону
видимости HUD. Когда опорная точка обзора HUD не совпадает с положением глаз,
вышеупомянутый установленный минимальный размер зоны видимости, возможно,
будет недостаточным. Возможность потери бинокулярного поля видимости во время
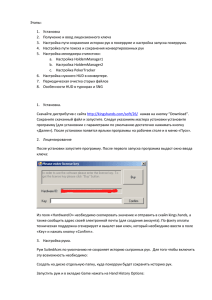
движения головы должна быть минимизирована. Рис.1 графически показывает, что
минимальная зона видимости HUD полностью содержится в пределах фактической
зоны видимости HUD.
12
Рисунок 1 – Минимальная зона видимости HUD
4.2.3 Точность позиционирования внешних символов или точность дисплея - это мера
соответствия, т.е. конформности изображения HUD по отношению к реальному
изображению, видимому через комбайнер и лобовое стекло из любой области зоны
видимости HUD. Точность Дисплея - это монокулярное измерение и для
фиксированной точки она численно равна угловой разнице между положением
реального объекта, наблюдаемого через комбайнер и лобовое стекло и положением
символа, проецируемого на HUD.
Общая погрешность отображения HUD (без учета ошибок датчика изображения и
искажений от лобового стекла) складывается из погрешности установки,
погрешности оцифровки, ошибок электронного усиления и смещения изображения,
оптических погрешностей, ошибок установки комбайнера, ошибок, обусловленных
проекционной системой, несоосностью и внешними факторами: (например,
температуры и вибрации), а также возможными допусками при изготовлении
компонентов системы. Оптические ошибки зависят как от положения головы, так и
от угла обзора и имеют три составляющих: нескомпенсированные ошибки
оптической системы, возникающие в результате аберрации , дисторсии изображения
и отклонений, допущенных при производстве изделия. Оптические ошибки
определяются статистическим способом замерами поля обзора HUD и его зоны
видимости.
Ошибки дисплея определяются отдельно для вертикальной и горизонтальной
плоскости. Общая ошибка должна характеризоваться как среднеквадратическое
значение этих двух компонент.
Все ошибки дисплея должны быть минимизированы в пределах области обзора в
зависимости от предполагаемого функционального назначения HUD.
Допустимые ошибки HUD, измеренные с предполагаемой точки наблюдения:
По линии визирования HUD - ≤ 17’11” (5.0 мрад);
≤ 10˚ диаметр ≤ 25’47” (7.5 мрад)(2 σ );
13
≤ 30˚ диаметр ≤ 34’23” (10 мрад)(2 σ );
> 30˚ диаметр ≤ 34’23”+kd[(FOV, град.)-30]
(10 мрад) +kr[(FOV, град.)-30] (2 σ );
kd=0’43” ошибки на градус поля обзора;
kr=0.2 мрад. ошибки на градус поля обзора.
Производитель HUD должен определить максимально допустимую ошибку
установки.
Точностные характеристики дисплея ни при каких ситуациях не должны приводить к
отображению информации, вводящей в заблуждение.
4.2.4 Выравнивание символов.
Символы, которые должны восприниматься относительно друг друга должны быть
выровнены вдоль одной оси, чтобы исключить ошибочную интерпретацию
информации. Независимые символы могут накладываться друг на друга, но это не
должно приводить к ошибочному восприятию информации.
4.2.5 Дрейф изображения.
Стабильность размера и положения изображения, формируемого системой, должна
быть обеспечивать выполнение требований п.4.2.3. Дрейф изображения не должен
приводить к ошибочному восприятию информации.
4.2.6 Ширина линий. С любой точки поля видимости HUD ширина линий символов (за
исключением специальных символов) должна быть не более 2 мрад, измеренная по
уровню интенсивности50% (замер должен выполняться при максимальной яркости
символа). Ширина линий символов должна быть не менее 0.5 мрад, по уровню
50%от интенсивности (замер должен выполняться при яркости символа 3.4 Кд/м2).
Ширина линий, отображаемых на дисплее должна быть соответствующего размера и
четкости, чтобы отображать требуемую информацию без визуальных эффектов
искажения или нечеткости изображения.
4.2.7 Дрожание изображения. Амплитуда дрожания дисплея должна быть менее 0.6 мрад.
по линии визирования HUD.
4.2.8 Мерцание изображения. Мерцание изображения не должно выходить за рамки
предусмотренных уровней при любых внешних воздействующих факторах
окружающей среды, в том числе при максимальном уровне внешней освещенности,
описанной в п.4.3.1. При наблюдении с любой точки внутри поля обзора HUD всей
области обзора. Частота обновления информации 60 Гц при использовании
люминофора Р-43 и 50 Гц для люминофора Р-53 должны обеспечивать допустимо
низкий уровень мерцания. При использовании других частот обновления и
люминофоров нужно доказать, что это не приводить к недопустимому мерцанию.
4.2.9 Качество символов. Линии, символы и буквы не должны иметь хвостов, закорючек,
наклона или промежутков, которые могут привести к неверной интерпретации
информации.
4.2.10 Ошибки, вызываемые бинокулярным параллаксом. HUD создает виртуальное
изображение на оптической бесконечности. Параллакс возникает, когда два глаза видят
одно и то же изображение на HUD. Поэтому, параллакс существует только в пределах
бинокулярного поля обзора (7.7). Если оптическая система не совершенна, будут
появляться незначительные угловые расхождения между тем, что видят оба глаза. Эти
14
расхождения известны как бинокулярные ошибки обусловленные параллаксом. Ошибки
параллакса определяются для расстояния между глазами в 63.5 мм (2,5 дюйма)
(расстояние между зрачками), которые обычно располагаются в горизонтальной
плоскости. Ошибки параллакса подразделяются на горизонтальные, ошибки,
возникающие в плоскости глаз, и вертикальные, которые располагаются в плоскости
перпендикулярной плоскости глаз. Определение этих ошибок расчетным путем считается
допустимым.
Ошибки, вызванные бинокулярным параллаксом, для фиксированной точки поля
обзора эквивалентны угловой разнице между двумя лучами, входящими в глаза,
разделенные расстоянием между зрачками. Для идеального проецируемого
виртуального изображения, угловые направления лучей одинаковы, и ошибка,
вызванная параллаксом, будет равна нулю. Т.к. оптические системы HUD не
совершенны, в них присутствуют остаточные некомпенсированные погрешности (см.
п. 4.2.3).
Горизонтальный параллакс в дальнейшем делится на: конвергентные ошибки, или
оптические ошибки, приводящие к тому, что приходиться сводить глаза вовнутрь
(т.е., объекты в пределах бесконечности), и дивергентные ошибки, приводящие к
повороту глаз в разные стороны. Вертикальные параллактические ошибки, или
дипвергенция, приводят к тому что глаза будут отклоняться по разному
относительно горизонтальной плоскости глаз. Т.о., конвергенция, дивергенция и
дипвергенция описывают, как два глаза ориентируются по отношению друг к другу,
для того, чтобы символы воспринимались слитно.
Как правило, глаза не могут с легкостью компенсировать дивергенцию или
дипвергенцию. По этой причине, эти ошибки должны быть максимально
минимизированы. Конвергенция ведет к тому, что кажущаяся глубина изображения
изменяется внутри поля обзора. Ошибки конвергенции могут легко визуально
компенсироваться, однако они приводят к снижению точности изображения.
Один из способов определения ошибки параллакса - необходимо разбить полное
поле обзора HUD на сетку, содержащую множество точек обзора (например, сетку
размером в 1о по вертикали на 2о по горизонтали). Далее выполняются замеры в
пределах зоны видимости HUD для каждой ячейки сетки, которой соответствует свое
положения головы. В результате получается большой массив значений с
измерениями. Ошибки параллакса для HUD могут выражаться как процентное
количество точек, для которых выполняются следующие требования.
Вычисленные ошибки параллакса должны отвечать следующим значениям 2 σ :
В пределах центральной части поля обзора диаметром 10 град, при наблюдении из
опорной точки наблюдения:
Конвергенция < 6’ 53” (2.0 мрад)
Дивергенция < 3’ 26” (1.0 мрад)
Дипвергенция < 3’ 26” (1.0 мрад)
В пределах всего поля обзора и при наблюдении в пределах зоны видимости HUD:
Конвергенция < 12’ 2” (3.5 мрад)
Дивергенция < 5’ 9” (1.5 мрад)
Дипвергенция < 6’ 53” (2.0 мрад)
Обратите внимание, что ошибка конвергенции 12’ 2” (3.5 мрад) соответствует
расстоянию до изображения примерно в 18 м (59 футов). Эти ошибки применимы к
15
HUD-ам, предназначенным для работы с неискажающими ветровыми стеклами.
Большие ошибки параллакса могут оказаться неприемлемыми при коррекции
искривлений ветрового стекла.
4.3 Фотометрические характеристики HUD
4.3.1 Яркость HUD. Должна быть обеспечена возможность использования индикатора
при всех возможных внешних условиях полета, как при солнечной засветке 34 000
кд/м2 (10 000 ft/L), так и при заходе ночью на слабоосвещенную ВПП (a black hole
approach).
4.3.2 Однородность яркости. Изменение яркости отображаемых символов, линий или
цифро-буквенной информации номинально от эквивалентного значения яркости
должно отвечать следующим требованиям:
При измерениях из центра зоны видимости HUD, изменение яркости символов
содержащихся в монокулярном мгновенном поле обзора должна быть менее чем ±
30%.
При измерениях в пределах 80% от зоны видимости HUD, изменение яркости
каждого символа должна варьироваться не более, чем на 30 %.
Эти требования применяются для любых настроек управляющих сигналов.
Рассчитываться изменение яркости должно по формуле
Отклонения однородности яркости (%) =
L max − L min
× 100
L max + L min
Где Lmax и Lmin – максимальное и минимальное, соответственно, значения яркости,
измеренное, как минимум в пяти точках, включая одну точку в центре изображения и
четыре точки, равноудаленные от центра.
4.3.3 Коэффициент контрастности изображения: Коэффициент контрастности HUD – это
коэффициент яркости видимого изображения по отношению к яркости внешней
среды.
Коэффициент контрастности HUD определяется следующим образом:
CR =
Ярк.изобр + Ярк.внеш
Ярк.внеш
Основываясь на этом определении, коэффициент контрастности равный единице
представляет собой отсутствие изображения на индикаторе.
Коэффициент контрастности HUD должен быть больше, чем 1.20, когда измеряется
напротив внешнего освещения яркостью 34 000 кд/м2, считая, что ветровое стекло
имеет 100% прозрачность. Измерение должно производиться в центре экрана с точки
обзора HUD. Ухудшение со временем параметров контрастности в 1.15 раза можно
считать допустимым. Требования к прозрачности комбайнера, п. 4.3.4, должны быть
автоматически достигнуты при расчете коэффициента контрастности.
4.3.4 Прозрачность комбайнера HUD. Световая пропускная способность комбайнера
HUD должна быть более 70% (в дневное время/фотопическая) под всеми углами
наблюдения HUD с опорной точки наблюдения. Прозрачность может быть измерена
при установке HUD напротив источника света D65 или вычислена с помощью
анализа/измерения. Прозрачность комбайнера не должна варьироваться более, чем
на 20 % на всем поле обзора при наблюдении с опорной точки HUD.
4.3.5 Смещение цветов. При использовании комбайнеров c селективным пропусканием
для улучшения фотометрических характеристик HUD, изменение цветов объектов
16
закабинного пространства не должно быть заметным и не должно вести к ошибочной
или двусмысленной интерпретации объектов реального мира.
4.3.6 Ручная и автоматическая регулировка яркости. Система HUD должна иметь как
ручную, так и автоматическую регулировку яркости. Когда осуществляется
регулировка яркости, соответствующая яркость отображаемых символов и
генерируемого изображения должна следовать управляющему воздействию в
плавной, комфортной для восприятия манере без резких изменений яркости. Не
должно быть ситуаций, при которых на минимальной яркости часть символов
становится невидимыми, в то время как остальные остаются читаемыми. Если HUD
имеет и ручное и автоматическое регулировани, переход из ручного режима в
автоматический и из автоматического в ручной не должен быть заметен.
Примечание: Автоматическая регулировка яркости настоятельно рекомендуется,
особенно для категорий посадки САТ II и CAT III, когда у пилота может не быть
времени для ручной регулировки яркости.
4.3.6.1 Ручная регулировка яркости. Должна быть реализована возможность ручной
регулировки яркости от минимального значения 1.7 кд/м2 (0.5 ft/L) до значения,
отвечающего требованиям п. 4.3.1.
4.3.6.2 Автоматическая регулировка яркости (если требуется). Когда пилотом
выбирается режим автоматической регулировки яркости, HUD должен быть
способен автоматически следовать изменениям внешнего освещения, при этом
предустановленный коэффициент контрастности должен оставаться примерно
одинаковым, как функция от внешнего освещения от 340 кд/м2 (100 ft/L) до
максимального значения яркости HUD в соответствии с п. 4.3.3. Яркость HUD
должна следовать внешнему освещению до тех пор, пока не будет достигнуто
максимально возможное значение. Если при этом внешняя яркость будет продолжать
увеличиваться, яркость HUD должна оставаться постоянной. Возможность
управления яркостью HUD может быть определена в процессе летных испытаний в
ночных условиях в диапазонах от темноты за стеклом и ночным заходом на посадку
на хорошо освещенную ВПП с видом на ярко освещенный город. ALSF II (или
эквивалентные) посадочные огни, огни зоны приземления, и огни центральной линии
с высокоинтенсивными посадочными огнями установленными с шагом 5. Ручная
регулировка яркости не должна негативно влиять на ошибки автоматической
регулировки.
4.3.7 Характеристики комбайнера. Насколько это практически возможно, оптические
характеристики и физические характеристики комбайнера должны обеспечивать
сохранение качества, не приводить к искажению изображения и не должны мешать
пилоту наблюдать за внешними ориентирами и другими ВС.
4.3.7.1
Оптические
искажения
изображения
закабинного
пространства
обусловленные комбайнером. Комбайнер HUD не должен вызывать угловых
смещений изображения объектов реального мира, наблюдаемых через комбайнер,
более чем 2.0 мрад (монокулярно).Это требование должно выполняться для всех
положений головы в пределах допустимой зоны видимости HUD. Максимально
допустимая
радиальная
погрешность
должна
быть
вычислена
как
среднеквадратическая ошибка на основе компонентов ошибки в азимутальной и
угломестных плоскостях. При просмотре через комбайнер HUD, ошибка (за счет
параллакса) в изображении реального мира, видимого пилотом должна быть менее
1.5 мрад.
17
4.3.7.2 Отражения. Вторичные отражения и блики: Комбайнер HUD не должен приводить
к каким либо нежелательным отражениям или бликам (от внешних или внутренних
источников), приводящим к ошибочному или неоднозначному восприятию объектов
реального мира или отображаемой информации.
4.3.7.3 Вторичные Изображения Дисплея. При просмотре через зону видимости HUD,
яркость любых других вторичных (паразитных) изображений должна быть меньше
2% от яркости основного изображения.
4.3.8 Цвет и однородность цвета. В случае, когда используются несколько цветов для
улучшения различимости, использование цвета не должно влиять на ошибочность
или неоднозначность интерпретации отображаемой информации. Разница в цвете
двух любых символов одного цвета, расположенных в любом месте полного поля
обзора HUD не должна быть достаточной для того, чтобы вызывать неоднозначную
или ошибочную идентификацию присвоенного цвета с любой позиции головы в
пределах поля обзора HUD.
4.3.9 Совмещение изображений (цветов). Когда элемент изображения состоит из
нескольких слоев (как, например, многопрожекторная ЭЛТ) центры линий
различных цветов должны совпадать. В любой точке изображения ошибка
совмещения должна быть в пределах среднего размера линии соответствующих
слоев в этой точке. Это требование относится ко всему полю зрения HUD, для всех
установок яркости.
Когда элемент изображения состоит из двух или более близко расположенных слоев
(например, в случае растровой генерации символов) основной цвет центров линий
должен совпадать. Это значение совпадения в любой точке должно быть в пределах
одной ширины линии дисплея когда рассматривается от указанной производителем
точки обзора HUD.
Ни в коем случае несовпадение цветов не должно приводить к ошибочному или
неоднозначному восприятию линий, символов, цифро-буквенной информации.
4.3.10 Разборчивость. Отображаемая информация должна иметь достаточную яркость,
контраст и/или цветовое различие чтобы обеспечить различимость:
- между символами, цифровыми и буквенными знаками, линиями и фоном
(внешняя обстановка, или сгенерированный)
- между одиночными символами, цифровыми и буквенными знаками, когда они
располагаются поверх фона внешней обстановки или сгенерированной.
- между сгенерированным фоном и реальной обстановкой;
- между сгенерированными фонами с использованием различных цветов.
Во всех случаях яркость, контрастность и/или различимость цветов между всеми
символами или всеми фонами должна быть достаточной для предупреждения
путаницы или неоднозначности содержания информации на любой отображаемой
информации.
4.4 Конструктивный блок:
Установка HUD должна быть выполнена таким образом, чтобы быть безопасной и не
приводить к травмам как во время штатных, так и во время экстренных операций.
Критерий, которому должен удовлетворять HUD, включает физические травмы
пилота во время турбулентности, жесткой посадки, столкновения с птицами,
экстренного торможения и при эвакуации.
18
4.4.1 Хранение комбайнера. Комбайнер HUD должен иметь возможность приводиться в
убранное состояние, когда он не используется.
4.4.2 Безопасность головы. Комбайнер должен быть сконструирован таким образом,
чтобы отвечать требованиям FAR 2X.562.
4.4.3 Положение выравнивания. HUD должен обеспечивать предупреждающую
сигнализацию для пилота, о том, что расположение комбайнера может привести к
опасному искажению видимой информации.
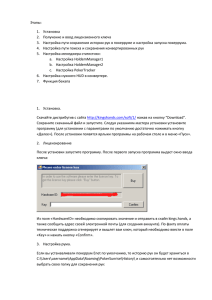
4.4.4 Зазор между головой пилота и комбайнером. Определяется, как кратчайшее
расстояние от головы пилота до ближайшей части HUD, расположенной точно над
головой пилота. Для целей данного документа, зазор определялся для головы
среднестатистического размера (95 процентов мужчин), представленной на рис. 2.
Производитель HUD должен определить, минимальное расстояние между
трехмерным контуром головы и ближайшей частью конструкции HUD, исключая
padding. Расстояние в 50 мм (2 дюйма) показано, как приемлемое.
Рисунок 2 Размеры головы 95% мужчин (в дюймах)
4.5 Характеристики растрового изображения (визуальное отображение
информации):
Т.к. HUD имеет возможность отображать растровые картинки, HUD должен отвечать
всем требованиям, связанным с этой областью в дополнение к другим требованиям
этого документа. Термин «растр» не подразумевает ограничение или лимитирование
в отношении технологии получения изображения, подходит любая технология,
обеспечивающая формирование полноэкранной картинки, содержащей изображение,
полученное от сенсорных датчиков или построенное на основе БД.
19
В случае, если HUD имеет возможность отображать видео от сенсорных датчиков,
или синтезированное трехмерное изображение, должно выполняться следующее:
4.5.1 Знако-графическая информация и растровое изображение. Растровое
изображение не должно отрицательно влиять на выдачу информации о полете, когда
эта информация должна быть отображена.
4.5.2 Разрешение растра. Требования к разрешению растрового изображения HUD
должны определяться разработчиком таким образом, чтобы соответствовать
угловому разрешению сенсорного датчика, оптической системе HUD и
предполагаемой функциональной нагрузке системы. Разрешение HUD и сенсорной
системы не должно ограничиваться возможностями изображения оптической или
электронной системой HUD. Разрешение растрового изображения должно
соответствовать установленным требованиям разработчика и требованиям в
соответствии предполагаемому функциональному использованию системы при
любых ВВФ (см. разд. 5).
4.5.3 Яркость растрового изображения. Должна быть адекватной для отображения
минимального количества градаций серого на фоне яркости реального мира,
типичного для той местности, в которой HUD и сенсорную систему предполагается
эксплуатировать. Производитель должен определить максимальную яркость фона, в
котором предполагается эксплуатация и минимальное количество градаций серого,
которые система должна отображать. Система должна иметь возможность
обеспечить выполнение требований по яркости растрового изображения во всех
ВВФ (см. разд. 5)
4.5.4 Диапазон контрастности растрового изображения. Значение контрастности
между последовательными градациями серого при отображении 6 градаций должно
быть 1.4 +0.4, - 0.2 при допустимых установках яркости и контрастности без учета
влияния внешнего фона.
4.5.5 Низкий уровень яркости растрового изображения. На темном внешнем фоне (с
яркостью менее 0.34 Кд/м2 (0.1 ft/L)), с символами и максимально белым видео,
настроенным на примерно 1.7 Кд/м2 (0.5 ft/L), минимум из шести градаций серого
должны быть видны и пустые области растра не должны быть видны.
4.5.6 Однородность яркости растрового изображения. Диапазон интенсивности между
любыми двумя точками в пределах 10 град. друг от друга или в пределах
монокулярного поля обзора не должно превышать ± 35 %, когда получен flat field
signal.
4.5.7 Дисторсия и линейность растрового изображения. Элементы картинки не должны
быть сдвинуты относительно их истинного расположения, т.к. это может
представлять угрозу того, что пилот будет введен в заблуждение.
4.5.8 Соответствие растровой картинки и внешнего вида. Растровое изображение от
сенсорных данных или синтезированное не должно ставить под угрозу
эффективность использования внешних визуальных ориентиров для решения
необходимых задач взлета, посадки, уклонения от препятствий, предупреждение
столкновений ВС, оценки пространственного положения по визуальным ориентирам.
Примечание: Это требование не подразумевает исключения использования изображения
для обеспечения улучшенного визуального ориентира совместимое с
описанными выше требованиями.
20
5 МИНИМАЛЬНЫЕ ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ В
УСЛОВИЯХ ВНЕШНИХ ВОЗДЕЙСТВУЮЩИХ
ФАКТОРОВ (ВВФ)
Чтобы продемонстрировать соответствие этим требованиям, изделие должно пройти
испытания (какие требуются) согласно процедурам проведения измерений на
определение технических характеристик под влиянием ВВФ установлены в RTCA
DO-160D (КТ-160). Испытания изделия, которые должны быть проведены после
воздействия тестовых ВВФ могут быть проведены и после воздействия нескольких
ВВФ. Порядок проведения испытаний должен соответствовать параграфу 3.2 раздела
3.0 DO-160D (КТ-160).
5.1 Требования:
Следующие требования должны выполняться для ВВФ, как требуется в
соответствующих параграфах. То, что изделие соответствует требованиям, может
быть продемонстрировано проведением испытаний, их анализа или их комбинации.
Например, точность расположения символов при воздействии температуры может
быть определена с помощью комбинации анализа испытаний, подтверждающих, что
оптика отвечает заданным требованиям при повышенной температуре, и измерений,
подтверждающих, что электроника отвечает требованиям по точности при
повышенной температуре.
5.1.1 Характеристики изображения: HUD должен отвечать требованиям следующих
параграфов:
a) 4.2.3 Точность положения символов (External)
b) 4.2.4 Точность расположения символов относительно друг друга
c) 4.2.5 Смещение изображения
d) 4.2.6 Толщина линий на изображении
e) 4.2.8 Дрожание изображения
f) 4.2.9 Качество символов
5.1.2 Яркость: Яркость изображения должна быть достаточной для обеспечения
требуемых функций.
5.1.3 Цвет: Там, где используются сложные цвета, любые изменения в цвете не должны
приводить к двусмысленному или ошибочному представлению информации.
5.1.4 Совмещение цветных изображений: Для цветных изображений, ошибочное
совмещение цветов не должно приводить к ошибочному или двусмысленному
представлению информации.
5.1.5 Механические операции: Все механические устройства должны работать
удовлетворительно.
5.2
Определение Условий.
Определение внешних воздействующих факторов (ВВФ), включая температурную
стабилизацию, управление, и категорию испытаний представлено в DO-160D/ED14D Раздел 2.0.
5.3
Условия Испытаний
21
Подключение оборудования, измерение температуры воздуха, допуски на условия
испытаний и требования к оборудованию для испытаний представлены в DO160D/ED-14D Раздел 3.0.
5.4
Испытания на воздействие температуры и высоты: (Раздел 4.0, DO-160D/ED14D)
5.4.1 Испытание на низкие температуры: Когда оборудование подвергнуто этому
испытанию, должны выполняться требования п. 5.1.
5.4.2 Испытание на повышенные температуры:
a.
Когда изделие подвергнуто повышенной рабочей температуре в течение
небольшого промежутка времени (кратковременное воздействие), оборудование
должно функционировать и электрически и механически.
b.
Когда оборудованием управляют в условиях высокой рабочей температуры,
требования 5.1 должны выполняться.
c.
Системы с принудительным воздушным охлаждением должны отвечать п. 5.1,
когда они подвергнуты испытанию в условиях имитации отказа системы
охлаждения.
5.4.3 Испытание на воздействие высоты: когда система индикации подвергнута этому
испытанию, требования п. 5.1 должны выполняться.
5.4.4 Испытание на воздействие пониженного давления (Когда Требуется): Когда система
индикации подвергнута этому испытанию, требования п. 5.1 должны выполняться.
5.4.4.1 Пониженное давление: При установке системы в соответствии с инструкциями
изготовителя оборудования, оборудование должно функционировать и не быть
повреждено после испытаний на воздействие пониженного давления в
соответствии с DO-160D/ED-14D, параграф 4.6.2.
5.4.4.2 Разгерметизация: прибор должен быть спроектирован таким образом, чтобы не
представлять опасности для самолета и команды, и/или оставаться
работоспособным в случае разгерметизации органических или неорганических
составов на больших высотах, DO-160D/ED-14D, параграф 4.6.5.4.5 Испытания на
воздействие повышенного давления (Когда Требуется): Когда оборудование будет
подвергнуто этому тесту, должны выполняться требования 5.1.
5.4.5 Испытание на повышенное давление (Когда требуется): Когда система индикации
подвергнута этому испытанию, требования п. 5.1 должны выполняться.
5.5 Испытание на изменение температуры (Секция 5.0, DO-160D/ED-14D).
Когда оборудование будет подвергнуто этому тесту, должны выполняться
требования 5.1.
5.6 Испытание на воздействие влажности (Секция 6.0, DO-160D/ED-14D)
Будучи подвергнутым этому испытанию, изделие должно удовлетворять следующим
требованиям:
5.6.1 В пределах 15 минут после того, как на оборудование должно быть подано
напряжение, изделие должно функционировать в режиме, который указывает, что
никакие существенные отказы компонентов или схемы не произошли.
5.6.2 В пределах 4 часов после того, как подано напряжение, должны выполняться
требования Секции 4.
5.7 Испытание на ударные нагрузки (Секция 7.0, DO-160D/ED-14D).
22
a. Будучи подвергнутым эксплуатационному тесту на удар, изделие должно
удовлетворять требованиям Секции 4.
b. Будучи подвергнутым тестированию на удар с точки зрения безопасности
разрушения, оборудование должно остаться в его месте установки и никакие части
оборудования, или части его установки не должны отвалиться.
5.8 Испытание на вибрацию (Секция 8.0, DO-160D/ED-14D).
a. Будучи подвергнутым этому испытанию, изделие не должно искажать размеры
изображения или изменять его визуальные особенности до такой степени, что оно
бы представляло вводящую в заблуждение или ошибочную информацию.
b. В конце процесса испытания на вибрацию должны выполняться требования
Секции 4.
5.9 Испытание на взрывобезопасность (Секция 9.0, DO-160D/ED-14D).
Во время этого теста оборудование не должно вызывать взрыв взрывчатой смеси в
пределах испытательной лаборатории.
5.10 Испытание на водонепроницаемость (Секция 10.0, DO-160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4.
5.11 Испытание на воздействие загрязняющих жидкостей (Секция 11.0, DO-160D/ED14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4.
5.12 Испытание на воздействие песка и пыли Секция 12.0, DO160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4. Внешние стеклянные поверхности могут быть укрыты во
время испытания на воздействие пыли и песка.
5.13 Испытание на грибоустойчивость (Секция 13.0, DO-160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4.
5.14 Испытание на воздействие солевого тумана (Секция 14.0, DO-160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4
5.15 Испытание на магнитное воздействие (Секция 15.0, DO-160D/ED-14D).
Когда оборудование будет подвергнуто этому испытанию, оно должно
соответствовать требованиям DO-160D/ED-14D для категории установок, для
которых оно предназначено.
5.16 Испытание на электропитание (Секция 16.0, DO-160D/ED-14D).
Как минимум, HUD должен соответствовать требованиям Секции 16.0 DO-160D/ED14D для прерываний входного напряжения. Следует отметить, однако, что
требования о том, чтобы сохранять работоспособность в условиях прерывания
входного напряжения, определенные в Секции 16, возможно, не достаточны для
некоторых применений HUD, в частности, во время критических фаз полета.
5.16.1 Работа оборудования при нормальном режиме электропитания: Когда
оборудование подвергнуто этому испытанию, требования Секции 4 должны быть
выполнены.
23
5.16.2 Работа оборудования при ненормальных режимах электропитания: Когда
оборудование подвергнуто этому испытанию, оно должно продолжить работать,
будучи включенным. Ухудшение работы устройства можно считать
удовлетворительным, если неоднозначная, ошибочная, или опасная информация
при условиях испытания не отображается и если оборудование возвратится к
нормальной работе, когда электропитание возобновиться в нормальном режиме.
5.17 Испытание на воздействие импульсов напряжения (Раздел 17.0, DO-160D/ED14D).
5.17.1 Категория испытания А: После проведения испытания по категории А, если это
применимо, оборудование должно отвечать требованиям Секции 4.
5.17.2 Категория испытания В:
a.
После окончания переходных процессов, должны выполняться требования
Секции 4.
b. Во время повторных переходных процессов изображение может исказиться на
короткий промежуток времени, однако, критическая информация должна быть
читаема и не вводить в заблуждение.
5.18 Испытание на восприимчивость к помехам звуковых частот, поступающих
через входы электропитания (Раздел 18.0, DO-160D/ED-14D).
Изображение не должно искажаться в размерах или в визуальных характеристиках
до такой степени, чтобы представлять неоднозначную или ошибочную информацию.
5.19 Испытание на восприимчивость к помехам индукции, воздействующим через
провода линий связи и корпуса оборудования (Раздел 19.0, DO-160D/ED-14D).
Изображение не должно искажаться в размерах или в визуальных характеристиках
до такой степени, чтобы представлять неоднозначную или ошибочную информацию.
5.20 Испытание на радиочастотную восприимчивость (Радиоизлучение и
проводимость) (Раздел 20.0, DO-160D/ED-14D).
Изображение не должно искажаться в размерах или в визуальных характеристиках
до такой степени, чтобы представлять неоднозначную или ошибочную информацию.
5.21 Испытание на излучение радиочастотной энергии (Раздел 21.0, DO-160D/ED14D).
Когда оборудование подвергнуто этому испытанию, оно должно соответствовать
требованиям для соответствующей категории, определенной изготовителем.
5.22 Испытание на восприимчивость к переходным процессам, вызванным
молнией (Раздел 22.0, DO-160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4 Испытания должны быть проведены, чтобы показать
соответствие оборудования требованиями, содержащимся в Разделе 22 DO-160 и AC
20-136. Категории испытаний должны выбираться из предложенных в разделе DO160D/ED-14D Раздела 22.0 и должны быть определены производителем
оборудования. Категории должны быть соразмерными с ожидаемыми на борту ВС,
на котором должно использоваться оборудование. Требования к выполнению
испытаний зависят от критичности отказа оборудования, определенных для
конкретного применения HUD (то есть, отказы, приводящие к опасным или
критичным режимам полета требуют большего количества исследований). Вообще,
нежелательные последствия воздействий допустимы во время испытаний в том
24
случае, если не происходит отображения неверной информации, или ухудшение
работы устройства не приводит к снижению безопасности работы. Ошибка
оборудования или потеря изображения допустимы, в случае, если режим нормальной
работы быстро восстанавливается после снятия воздействия.
5.23 Испытание на прямое воздействие молнии (когда требуется) (Раздел 23.0, DO160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4.
5.24 Испытание на воздействие обледенения (когда требуется) (Раздел 24.0, DO160D/ED-14D).
Нет определенных требований к HUD.
5.25 Испытание на воздействие электростатического разряда (HIRF) (Раздел 20.0,
DO-160D/ED-14D).
Будучи подвергнутым этому испытанию, изделие должно соответствовать
требованиям Секции 4. Требования к выполнению испытаний HIRF зависят от
критичности отказа оборудования, определенных для конкретного применения HUD
(см. AC 25-1309-1B). Нежелательные последствия воздействий допустимы во время
испытаний в том случае, если не происходит отображения неверной информации,
или ухудшение работы устройства не приводит к снижению безопасности работы.
Ошибка оборудования или потеря изображения допустимы, в случае, если режим
нормальной работы быстро восстанавливается после снятия воздействия. DO160D/ED-14D Раздел 20.0 используемая категория испытаний должна быть
определена производителем оборудования. Категории HIRF должны быть
соразмерными с ожидаемыми в течение времени, работы оборудования, и степени
защиты, обеспеченной в месте установки на ВС, где предполагается использовать
оборудование.
5.26 Воздействие Рентгеновского излучения.
Система индикации должна быть сконструирована таким образом, чтобы не
вызывать повреждений ВС и экипажа в следствии рентгеновского излучения.
Излучаемая энергия, измеренная на расстоянии 5 см (2 дюймов) от поверхности
блока в направлении оси обзора в худшем случае не должна превышать 0.1
миллирентген в час. Измерения должны проводиться в соответствии с
процедурами, определенными в EIA - 503-a. Анализ рентгеновского излучения может
быть представлен вместо испытания.
5.27 Воздействие ультрафиолетового излучения.
Излучение, испускаемое системами индикации и попадающее на поверхность кожи
или глаза, не должно превышать следующие значения:
a.
b.
при длине волны от 200 до 315 нм: 0.05 x 10 -6 Вт/cm2
при длине волны от 315 до 400 нм: 0.05 x 10 -3 Вт/cm2
Ультрафиолетовое излучение должно быть измерено с использованием
Радиометр, установленного настолько близко к блоку дисплея, насколько это
возможно. Анализ ультрафиолетового излучения может быть представлен
вместо испытания.
25
5.28 Запотевание (Только герметично запечатанные или просушенные блоки
дисплеев).
Дисплейный блок в режиме работы, должен быть подвергнут воздействию
повышенной рабочей температуры минимум на 30 мин. При нахождении блока в
условиях повышенной температуры, внешняя поверхность линзы должна быть
охлаждена до температуры не ниже 20 °C. На внутренней стороне линзы (с
покрытием или фильтром) не должно образоваться запотевания.
5.29 Воздействие тепловых ударов.
Дисплейный блок в режиме работы, должен быть подвергнут воздействию
максимальной рабочей температуры (5.2.2) и минимальной рабочей температуры
(5.2.1) без видимых повреждений или отказа в ходе испытания. Работающий блок
должен находиться в камере в условиях высокой температуры, пока температура
блока не стабилизируется. Когда это произойдет, модуль должен быть перемещен,
настолько быстро насколько возможно, но в не более, чем за 5 минут, в камеру с
температурой, соответствующей низкой рабочей температуре. Модуль должен
продолжать работать в этой низкой температуре, пока температура модуля не
стабилизируется, но время стабилизации не должно превышать 1 ч.
6. МЕТОДИКА ИСПЫТАНИЙ:
6.1
Условия испытаний:
В случае если не определено иначе соответствующим FAR-ом, испытания системы
отображения, необходимые для подтверждения соответствия этим AS, должны быть
определены разработчиком. Система в целом должна соответствовать требованиям
рекомендованной процедуры испытаний, обозначенной изготовителем, прежде, чем
это квалификационное испытание будет начато.
Если иначе не определено ниже, оборудование, удовлетворяющее требованиям этого
стандарта, должно быть проверено при условиях, определенных в Разделе 3 RTCA
DO-160D/EUROCAE ED-14D и/или в соответствующих разделах этого документа.
6.2
Внешние условия испытаний:
Когда испытания проводятся с атмосферным давлением или температурными
значениями, существенно отличающимися от определенных в DO-160D/ED-14D,
должны быть сделаны допущения на эти изменения.
6.3
Условия электропитания:
Если не определено иначе, все испытания должны проводиться при подаче
электропитания (подаваемое напряжение, частота, и т.д.) рекомендованного
изготовителем.
7.
7.1
ГЛОССАРИЙ ТЕРМИНОВ:
Окружающий Фон:
Фон изображения, не включающий сгенерированный фон.
7.2
Неоднозначная или Ошибочная Информация:
Информация, которая способствует пониманию в отличном от намеченного смысле.
26
7.3
Комбайнер:
Компонент системы индикации, располагающийся в передней области поля зрения
пилота, который обеспечивает совмещение символики и внешней обстановки в поле
зрения.
7.4
Конформный:
Конформной информацией считается та, которая накладывается на реальный объект,
и они отображаются совместно, в независимости от точки наблюдения.
7.5
Коэффициент контрастности: См. 4.3.3.
7.6
Желательное положение глаза:
Желательное положение глаза – это единственная позиция, определяемая
изготовителем корпуса ВС, которая обеспечивает оптимальную комбинацию
внешней видимости и рассматривания сгенерированной информации.
7.7
Поле обзора (FOV):
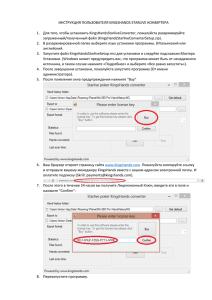
7.7.1 Полное поле обзора: объединение телесных углов, стягиваемых в каждом глазу
световым диаметром оптики HUD с точки наблюдения в пределах зоны видимости
HUD. Таким образом, полное FOV определяет максимальную угловую величину
изображения, которая может рассматриваться любым глазом, при любом
перемещении головы в пределах зоны видимости HUD. Определяется в градусах по
вертикали и по горизонтали. Полное FOV отображено на рис. 3.
7.7.2 Мгновенное FOV (IFOV): объединение двух телесных углов, стягиваемых в
каждом глазу световым диаметром оптики HUD, с какой-то одной точки обзора,
когда голова неподвижна, в пределах зоны видимости HUD. Таким образом,
мгновенный FOV состоит из того, что левый глаз видит плюс то, что правый глаз
видит, когда голова неподвижна в пределах зоны видимости HUD. Мгновенное FOV
представлено на рис. 3 как сумма монокулярного FOV левым глазом и правым
глазом.
7.7.3 Бинокулярное перекрывающееся FOV: пересечение двух телесных углов,
стягиваемых в каждом глазу световым диаметром оптики HUD, когда голова
неподвижна в пределах зоны видимости HUD. Определяет максимальную угловую
величину изображения HUD, которая может быть видна обоими глазами
одновременно. Таким образом, бинокулярное перекрывающееся FOV состоит из
области, видимой левым глазом, которая совмещается с областью, видимой правым
глазом, когда голова неподвижна в пределах зоны видимости HUD. Бинокулярное
перекрывающееся FOV представлено на рис. 3.
7.7.4 Монокулярное FOV: телесный угол, стягиваемых в каждом глазу световым
диаметром оптики HUD, с какой-то одной точки обзора, когда голова неподвижна.
Определяет угловой размер изображения HUD, видимого одним глазом, как
показано на рис. 3. Размер и форма монокулярного FOV зависят от позиции
наблюдателя в пределах зоны видимости HUD.
7.8
Нежелательное мерцание:
Нежелательное быстрое изменение яркости изображения во времени частично или
полностью.
27
7.9
Сгенерированный Фон:
Изображение сгенерированное самой системой, на которое может накладываться
символика.
7.10
Вычислитель HUD, Генератор Символов HUD, или Процессор HUD:
Вычислитель HUD решает задачи обеспечения взаимодействия, обработку
изображения и генерацию символов, обеспечивает подачу питания, и
взаимодействие с оптическим блоком. Компьютер HUD получает данные от
внешних датчиков и систем, генерирует символику в виде электронных сигналов, и
передает символы на дисплейный блок(и) для отображения пилотам.
7.11
Пульт управления HUD (HCP):
Пульт управления - дополнительный блок, обеспечивающий возможность вручную
выбирать режимы отображения информации и вводить справочные данные.
Осуществлять управление яркостью HUD можно также с помощью HCP, в случае,
если пилот может корректировать сигнал яркости HUD, не покидая зону видимости
HUD
7.12
Опорная точка обзора HUD:
Пространственное положение глаза наблюдателя относительно оптической оси,
определяется изготовителем. Опорная точка обзора HUD содержится в пределах
указанной зоны видимости HUD.
7.13
Зона видимости HUD:
См. 4.2.2.
7.14
Система HUD:
Система индикации, которая представляет символику о параметрах полета в поле
зрения пилотов. Символы должны быть представлены как виртуальное изображение,
коллимированное в оптическую бесконечности.
7.15
Отраслевые (Промышленные) стандарты:
Стандарт, который был принят в промышленности, который будет полезен для
разработки и приобретения оборудования.
7.16
Дрожание:
Нежелательное, быстрое движение изображения, заметное к человеческому глазу,
расположенному в опорной точке обзора HUD.
7.17
Ширина линии:
Ширина 50 % пикового значения яркости от распределения яркости по линии.
7.18
Яркость:
Сила света любой поверхности в заданном направлении, приходящаяся на участок
поверхности, на которую проецируется изображение, при наблюдении в этом
направлении.
28
7.19
Минимальные технические требования:
Стандарт, который определяет минимальные технические требования к
оборудованию в соответствии с условиями работы и ВВФ, в которых должно
функционировать изделие в течение полета (при выруливании, взлете, наборе
высоты, крейсерском полете, заходе на посадку, приземлении, и такси). Он также
определяет минимальные требования к оборудованию для обеспечения безопасности
полета.
7.20
Неконформный:
Термин описывает генерируемую на HUD информацию, которая не должна
приводиться в соответствие реальным объектам.
7.21
Режимы работы:
Выбираемый пилотом или автоматически набор в намеченный функций системы
индикации HUD.
7.22
Оптическая Бесконечность:
Когда речь идет о системе индикации HUD, под оптической бесконечностью
понимается состояние, когда расстояние от изображения до виртуального дисплея
таково, что горизонтальный параллакс для 95 % всех возможных углов просмотра и
главных позиций в пределах зоны видимости HUD менее, чем 12' 2" (3.5 mrad). Это
условие дает оптическое расстояние до изображения по крайней мере 18 м. (59
футов).
7.23
Ошибки Параллакса:
Оптические ошибки, свойственные бинокулярным оптическим системам HUD,
обусловленные некомпенсированными отклонениями зрачка. Ошибки параллакса
существуют только, когда два глаза рассматривают ту же самую информацию
относительно источника изображения HUD (например, точки области, содержащиеся
в пределах бинокулярного FOV). Ошибки параллакса как правило определяются для
глаз, расположенных относительно друг друга на расстоянии 63.5 мм (2.5 дюймов)
(расстояние между зрачками), которые лежат как правило в горизонтальной
плоскости. Ошибки параллакса подразделены на горизонтальные ошибки, т.е.
ошибки в плоскости глаз, и вертикальные ошибки, которые располагаются в
плоскости перпендикулярной плоскости глаз.
7.23.1 Конвергенция: горизонтальный компонент параллакса, который приводит к тому,
что глаза наблюдателя смотрят внутрь, иначе говоря, взгляд фокусируется на
конечном расстоянии до изображения.
7.23.2 Дивергенция: горизонтальный компонент параллакса, который приводит к тому,
что глаза наблюдателя смотрят наружу, или расходятся.
7.23.3 Дипвергенция: вертикальный компонент параллакса, который приводит к тому, что
глаза наблюдателя отклоняться дифференцированно из горизонтальной плоскости
глаз.
7.24
Фотопический:
Фотометрическое измерение, где спектральная чувствительность измерительного
прибора соответствует спектральной чувствительности человеческого глаза,
приспособленного к условиям дневного света.
29
7.25
Основной пилотажный индикатор:
Электронный дисплей, который обеспечивает по крайней мере основную
информацию «T» в соответствии с AC 25-11, параграф 7.a.
7.26
Растровая разрешающая способность:
Растровая разрешающая способность - мера угловых возможностей решения HUD.
Растровая разрешающая способность определяется независимо вдоль вертикальной и
горизонтальной оси дисплея. Как пример, HUD может обеспечивать 200 различимых
пар линий по вертикали (горизонтали) в пределах поля обзора дисплея 20 °. Это дает
10 различимых пар линий по вертикали (горизонтали) на градус дисплея HUD.
7.27
Избыточность:
Резервные методы выдачи и обработки данных, обеспечивающие
отказоустойчивость.
7.28
Рефлексивный или Голографический HUD: См. Приложение A.
7.29
Рефрактивный HUD: См. Приложение A.
7.30
Работоспособность:
Оборудование должно служить его намеченной функции и не должно превышать
установленные допуски.
7.31
Отказоустойчивость:
Оборудование не должно проявлять характеристики или повреждения, которые
препятствуют надлежащему функционированию и/или использованию.
7.32
Коэффициент пропускания комбайнера:
Процент света от внешнего источника, проходящего через комбайнер.
30
ПРИЛОЖЕНИЕ А
Типы коллиматорных индикаторов
А1 HUD-ы, рефрактивного типа (с преломляющей оптикой)
HUD с преломляющей оптикой используются на протяжении долгого времени и в
военной и в коммерческой авиации. HUD с преломляющей оптикой характеризуются
оптической системой, представленной на рис. A1.
В этой конструкции изображение катодно-лучевой трубки коллимируется
(фокусируется в оптической бесконечности) линзовым объективом оптической
системы. Коллимация достигается преломляющей оптикой. Линзовый объектив
действует как выходной зрачок после того, как изображение отражено комбайнером,
как показано на рис. A1. Изображение HUD, наблюдаемое пилотом формируется в
плоскости выходного зрачка. Похоже на просмотр в иллюминатор, при нахождении
наблюдателя на расстоянии в несколько футов. Только в рассматриваемом случае
полное изображение может быть увидено с определенной позиции головы. В HUD,
мгновенное поле обзора равно углу, который выходной зрачок стягивает в глазу
пилота. При перемещении головы вверх и вниз и из стороны в сторону, происходят
изменения стягиваемого угла и пилот может видеть другую часть поля обзора.
Предельные значения стягиваемого угла определяются как полное поле обзора и
зависят от оптической конструкции и размера катодно-лучевой трубки. См. рис. A2.
Рисунок А1 – Оптическая схема HUD рефрактивного типа
31
Рисунок А2 – Поле обзора HUD (на оптическую бесконечность)
Чтобы увеличить поле обзора в преломляющем HUD, или размер выходного зрачка,
апертура должна быть увеличена, или расстояние от глаза пилота до выходного
зрачка должно быть уменьшено. Вертикальное мгновенное поле обзора может быть
увеличено, с помощью добавления второй параллельной линзы комбайнера, но
вертикально смещенной выше первой, как показано на рис. A3.
Рисунок А3 – HUD со вторым комбайнером
Комбайнеры в преломляющих HUD cпроектированы таким образом, чтобы отразить
определенный процент от света, исходящего из катодно-лучевой трубки.
Специальные отражающие покрытия могут использоваться на комбайнере, чтобы
расширить коэффициент отражения. Отражающие покрытия могут быть или
нечувствительными к длине волны или чувствительными к длине волны, в
32
зависимости от характеристик пропускания и отражения, которые необходимо
получить у комбайнера. Если используются покрытия нечувствительные к длине
волны, сумма пропускания комбайнера и отражения комбайнера, меньше или равна
единице.
2А HUD-ы, дифрактивного типа (с отражающей оптикой):
"HUD дифрактивного типа" также упоминается как "Голографический HUD", или
"Отражающий HUD". В этом подходе к конструкции, функция коллимирования,
выполняется совместно линзовым объективом, как в HUD рефрактивного типа, с
комбайнером, выполненными в виде отдельного элемента - коллиматорного
комбайнера. Комбайнер обязательно имеет оптическую силу и часто искривлен.
Искривленная отражающая поверхность комбайнера совместно с оптическим блоком
обеспечивает коллимированное изображение в оптической бесконечности.
С помощью совместного выполнения функций объединения и коллимирования,
эффект иллюминатора больше не ограничивает поле обзора. Поле обзора в этом
случае в большей степени ограничено геометрией кабины и геометрическими
ограничениями, типа максимального размера комбайнера и зоны видимости HUD.
Комбайнер, используемый в отражающем HUDs, часто дополняется покрытием,
улучшающим отражение, типа голографического покрытия, чтобы отражать
промежуточное изображение катодно-лучевой трубки пилоту. Когда используются
покрытия, отражающие выборочные длины волн (напр. голограммы) сумма
пропускания комбайнера и отражение комбайнера, может быть больше единицы.
Рис. A5 иллюстрирует типичную оптическую конфигурацию HUD.
Одна существенная выгода отражающей оптики в том, что мгновенное поле обзора
является большим чем в преломляющем HUDs и приближается к полному полю
обзора системы. Получающееся преимущество состоит в том, что пилот больше не
должен перемещать голову, чтобы видеть полное поле обзора. Изображение остается
видимым, пока глаза пилота остаются в пределах поля обзора HUD или выходного
зрачка. Из этого следует, что большее поле обзора позволяет в большем диапазоне
двигать головой, не теряя мгновенное поле обзора. Типичное поле обзора HUD
дифрактивного типа представлено на рис. A4.
Рисунок А4 – Поле обзора HUD дифрактивного типа
33
Рисунок А5 – Оптическая схема HUD дифрактивного типа
34