ОБОБЩЕННЫЕ МОДЕЛИ (А
advertisement

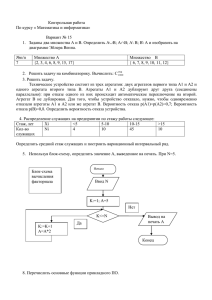
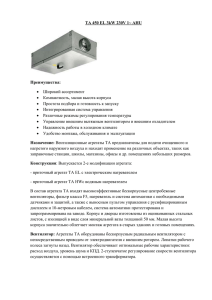
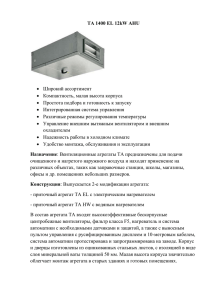
ОБОБЩЕННЫЕ МОДЕЛИ (А-СИСТЕМЫ) Рассмотренные выше математические схемы (конечные автоматы, динамические системы, системы массового обслуживания и т.д.) широко применяются для формального описания элементов при моделировании и исследовании сложных систем. Однако, необходимо отметить, что таким образом могут быть решены далеко не все проблемы, возникающие в теории сложных систем и системотехнике. В самом деле, единое математическое описание получают только те системы, элементы которых в результате формализации либо все оказываются конечными автоматами, либо все - системами массового обслуживания, либо все - динамическими системами и т.д. Другими словами, приходим к весьма узким классам сложных систем. Наиболее существенным с теоретической и практической точек зрения является случай, когда элементы системы описываются разнородными математическими схемами. Из-за отсутствия единого формального описания элементов трудно рассчитывать на создание общих методов исследования системы в целом, а также единого подхода к классификации сложных систем, изучению общих свойств важнейших классов систем, их анализу и синтезу. Введение унифицированной абстрактной схемы, позволяющей единообразно описывать все элементы системы (дискретные, непрерывные, детерминированные, стохастические), имеет существенное значение. Унифицированной абстрактной схеме нужно придать достаточно общий вид, с тем, чтобы она охватывала разнообразные типы реальных систем. Очевидно, что она, по крайней мере, должна содержать перечисленные выше математические схемы как частные случаи. Для этого необходимо, чтобы унифицированная схема имела динамический характер, описывала обмен сигналами с внешней средой и учитывала действие случайных факторов. Наиболее известным общим подходом к формальному описанию процессов функционирования систем является подход, предложенный Н.П. Бусленко - базируется на понятии агрегативной системы (Aggregate system - англ.), представляющей собой формальную схему общего вида, которую будем называть А-системой. При агрегативном описании сложный объект (система) разбивается на конечное число частей (подсистем), сохраняя при этом связи, обеспечивающие их взаимодействие. Если некоторые из полученных подсистем оказываются в свою очередь еще достаточно сложными, то процесс их разбиения продолжается до тех пор, пока не образуются подсистемы, которые в условиях рассматриваемой задачи моделирования могут считаться удобными для математического описания. В результате такой декомпозиции сложная система представляется в виде многоуровневой конструкции из взаимосвязанных элементов, объединенных в подсистемы различных уровней. В качестве элемента А-системы выступает агрегат, а связь между агрегатами внутри системы и с внешней средой осуществляется с помощью оператора сопряжения. Очевидно, что агрегат сам может рассматриваться как А-система, т.е. может разбиваться на элементы (агрегаты) следующего уровня. Любой агрегат характеризуется следующими множествами: моментов времени T, входных X и выходных Y сигналов, состояний Z в каждый момент времени. Каждый элемент А-системы, будучи в общем случае агрегатом, необязательно должен обладать полным комплексом свойств агрегата; он может быть и более простым объектом, представляющим собой частный случай агрегата. Другими словами, среди элементов А-системы не могут содержатся объекты более общего характера, чем агрегат. В качестве примера одна из возможных схем А-системы приводится на рисунке (1). Прямоугольники, помеченные буквами А1, А2 и т.д. обозначают агрегаты А-системы. Рисунок 1. Функционирование А-системы связано с переработкой информации. На рис.(1) передача информации показана стрелками. Вся информация, циркулирующая в А-системе, делится на: - внешнюю (поступающую извне от объектов, не являющихся элементами данной системы); - внутреннюю (вырабатываемую агрегатами самой системы). Обмен информацией между А-системой и внешней средой происходит через агрегаты, называемые полюсами системы. Так, имеются входные полюсы, представляющие собой агрегаты, для которых входная информация, поступающая в виде (x)-сообщений, является полностью или частично внешней информацией. На рис. (1) входными полюсами являются агрегаты А1 и А4. Все (x)-сообщения, поступающие к агрегату А1, представляют собой внешнюю информацию. Для агрегата А4 соответствующие (x)-сообщения оказываются лишь частично внешней информацией. Некоторая часть (x)-сообщений поступает к агрегату А4 от агрегата А5 и является внутренней информацией А-системы. Наряду с входными полюсами рассматриваются и управляющие полюсы. Управляющими полюсами А-системы называются агрегаты, для которых (g)-сообщение, поступающие по особым входным каналам, представляет собой полностью или частично внешнюю информацию. На рис.1 управляющими полюсами являются агрегаты А1, А3 и А6. Все (g)-сообщения, поступающие к агрегатам А1 и А3 являются внешней информацией. Соответствующее (g)сообщение, поступающие к агрегату А6, частично оказываются внешней информацией и частично внутренней, поступающей от агрегата А2. Заметим, что агрегат А1 является одновременно входным и управляющим полюсом системы, а агрегат А6 - только управляющим полюсом. Выходным полюсом А-системы называется агрегат, выходная информация которого, выдаваемая в виде (y)-сообщений, оказывается полностью или частично выходной информацией А-системы (поступает во внешнюю среду к объектам, не являющимся элементами данной А-системы). Выходными полюсами А-системы (рис.1) являются агрегаты А3 и А7. Все (y)-сообщения, выдаваемые агрегатом А7, являются выходной информацией А-системы. Выходные (y)-сообщения агрегата А3 лишь частично являются выходной информацией А-системы, некоторые из них поступают к агрегату А7. Агрегат А3 является одновременно выходным и управляющим полюсом А-системы, а агрегат А7 - только выходным полюсом. Агрегаты, не являющиеся полюсами, называются внутренними агрегатами (например А2 и А5). Входная и управляющая информация внутренних агрегатов А-системы, т.е. соответствующие (x)сообщения и (g)-сообщения, вырабатывается исключительно внутри самой системы и состоит из выходной информации, или (y)-сообщений других агрегатов А-системы. Аналогично выходная информация внутренних агрегатов, выдаваемая ими в виде (y)-сообщений, поступает в качестве входной или управляющей информации к другим агрегатам А-системы. Частично это справедливо и для полюсов. На рис.(1) выходная информация агрегата А1 является входной информацией для агрегатов А2 и А5 и управляющей информацией для агрегата А2. Аналогично выходная информация агрегата А2 является входной для агрегата А3 и управляющей для агрегата А6. В частном случае А-система может не содержать внутренних агрегатов и состоять только из полюсов. Могут быть также случаи, когда в А-системе отсутствуют входные или управляющие полюсы. Такая А-система воспринимает соответственно только управляющую или только входную информацию. Наконец, А-система может состоять лишь из одного агрегата. Этот агрегат одновременно может быть входным, управляющим и выходным полюсом А-системы. Передача информации в А-системах происходит мгновенно, т.е. момент выдачи информации какимнибудь агрегатом является также моментом поступления входной или управляющей информации в некоторый агрегат системы. Такое предположение не является ограничением при использовании Асистемы для описания процессов функционирования реальных сложных систем. В самом деле, если в реальной системе передача информации между ее элементами происходит с задержкой во времени, то соответствующая линия передачи информации представляется как самостоятельный агрегат, осуществляющий задержку. Тогда в формализованной схеме системы передачи информации между элементами будет уже происходить мгновенно. Обобщая вышесказанное, дадим следующее определение А-системе: любая совокупность агрегатов называется агрегативной системой, если передача информации между агрегатами происходит мгновенно и без искажений. Свойства А-системы определяются не только свойствами составляющих агрегатов, но также ее структурой. Рассмотрение структуры начнем с определения соотношений взаимодействия между агрегатами. Два агрегата B и С называются непосредственно связанными, если между ними осуществляется прямая передача информации, т.е. выходная информация агрегата В является входной или управляющей для агрегата С, или наоборот. Помимо непосредственно связанных агрегатов рассмотрим просто связанные агрегаты. Агрегаты B и С называются связанными, если существует такая совокупность агрегатов В, D1, D2,...,Ds, C, что каждые два соседних агрегата В, D1; D1, D2;...; Ds,C непосредственно связаны. Легко видеть, что непосредственно связанные агрегаты являются связанными, но не наоборот. Рассмотрим некоторые виды связи между агрегатами. Будем говорить, что агрегат С непосредственно следует за агрегатом В, если некоторая часть выходной информации агрегата В является частью входной информации агрегата С. Очевидно, что данный агрегат, если даже он является полюсом А-системы, может непосредственно следовать за несколькими агрегатами А-системы. На рис. (1) агрегат А1 непосредственно предшествует А2 и А5; А5 непосредственно следует за А1 и А4 и в то же время непосредственно предшествует агрегатам А4 и А6; и т.д. Помимо соотношений непосредственного следования, характерных для непосредственно связанных агрегатов, рассмотрим аналогичные соотношения для связанных агрегатов. Будем говорить, что агрегат С следует за агрегатом В, если существует такая совокупность агрегатов В, D1, D2,...,Ds, C, каждый из которых непосредственно следует за предыдущим. В А-системе рис. (1) агрегат А3 следует за агрегатом А1; агрегат А4 предшествует А6 и т.д. Аналогично будем говорить, что агрегат В непосредственно управляет агрегатом С (агрегат С непосредственно подчинен В), если некоторая часть управляющей информации агрегата С представляет собой часть выходной информации агрегата В. Данный агрегат может непосредственно управлять несколькими агрегатами или непосредственно подчинен нескольким агрегатам А-системы. На рис. (1) агрегат А1 непосредственно управляет агрегатом А2, а агрегат А6 непосредственно подчинен агрегату А2. Агрегат В управляет агрегатом С, если существует такая совокупность агрегатов В, D1, D2,...,Ds, C, что каждый из них непосредственно управляет последующим агрегатом. На рис. (1) А6 подчинен агрегату А1. Данный агрегат может управлять несколькими агрегатами или быть подчинен нескольким агрегатам А-системы. Очевидно, что любая подсистема А-системы представляет собой также А-систему. А-система называется комплексом, если любой ее агрегат связан хотя бы с одним агрегатом этой А-систем. В общем случае А-система не является комплексом. Комплексом могут оказаться некоторые ее подсистемы. Если условиться, что А-система, состоящая из одного агрегата, является комплексом, тогда любая А-система представляется в виде совокупности комплексов. Два комплекса называются несвязанными, если любые пары, составленные из агрегатов, принадлежащих различным комплексам, представляют собой несвязанные агрегаты. По аналогии с агрегатом можно установить соотношение следования и подчиненности (непосредственного следования и непосредственной подчиненности) для комплексов. Например, будем говорить, что комплекс С следует за комплексом В, если некоторая часть выходной информации от выходных полюсов комплекса В в качестве входной информации поступает ко входным полюсам комплекса С. Комплекс С подчинен комплексу В, если некоторая часть выходной информации комплекса В представляет собой часть управляющей информации, поступающей к управляющим полюсам комплекса С. Исходя из указанной терминологии можно выделить некоторые важные типы структуры Асистем. А-система называется m-фазной, если она состоит из m-комплексов, каждый из которых (за исключением первого, являющегося входным полюсом) непосредственно следует за одним и только за одним комплексом А-системы, вплоть до последнего, представляющего собой выходной полюс. Легко видеть, что многофазная А-система является комплексом. На рис. (2) представлен пример многофазной А-системы. Здесь агрегаты А1, А2, А3 и А4 представляют собой комплекс Ф1 (первая фаза), агрегат А5 является комплексом Ф2 (вторая фаза) и агрегаты А6, А7 и А8 составляют комплекс Ф3 (третья фаза). Рисунок 2. А-система называется n-канальной, если она состоит из n несвязанных друг с другом комплексов. Очевидно, что многоканальная А-система имеет входные и выходные полюсы в каждом из составляющих ее n-комплексов, а обмен информацией между отдельными комплексами отсутствует. На рис (3) представлен пример многоканальной А-системы. В комплексе К1 (первый канал) входным полюсом является агрегат А1, в комплексе К2 (второй канал) - агрегат А8, в комплексе К3 (третий канал) - агрегат А10. Выходными полюсами соответственно являются агрегаты А7, А9 и А15. Многоканальная А-система не является комплексом. А-система называется иерархической (с одним уровнем управления), если она состоит из некоторого количества комплексов, подчиненных одному (управляющему) комплексу. Если при этом управляющий комплекс не подчинен ни одному из подчиненных ему комплексов, то А-система называется строго иерархической. Очевидно, что иерархическая А-система представляет собой комплекс. Рисунок 3. Пусть теперь А-система состоит из нескольких иерархических А-систем, подчиненных одному управляющему комплексу. Такая А-система называется иерархической с двумя уровнями управления. Вновь образованный уровень управления считается высшим. Аналогично могут быть образованы иерархические А-системы с произвольным числом уровней управления. Рассмотренные типы А-систем являются простейшими конструкциями, состоящими из агрегатов. Тем не менее они охватывают значительную часть важных в практическом отношении реальных сложных систем. Отметим, что разбиение системы на агрегаты не является единственным. Возможны различные варианты агрегатного представления А-системы, в том числе возможны варианты, когда совокупность элементов системы, представленная в одном из вариантов в качестве агрегата, в других вариантах описывается двумя, тремя и т.д. агрегатами. Отсюда можно сделать вывод, что объединение двух, трех и т.д. агрегатов А-системы само является агрегатом. Необходимо иметь в виду, что при объединении нескольких агрегатов в один суммарный существенную роль играют связи между агрегатами. Характер этих связей оказывает значительное влияние на тип и свойства суммарного агрегата.