ПОСТРОЕНИЕ ОПТИМАЛЬНОЙ ТРАЕКТОРИИ ДЛЯ ОХРАНЫ АКВАТОРИИ
advertisement

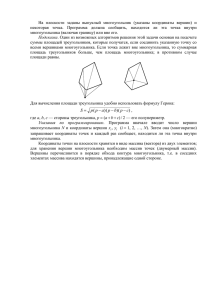
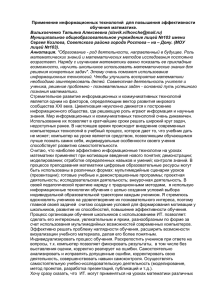
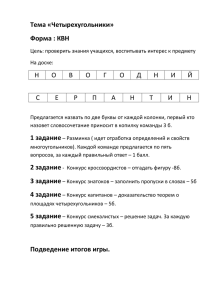
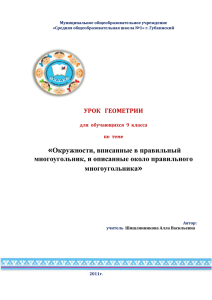
Научные сообщения Г.Ю. Белый, В.А. Родин ПОСТРОЕНИЕ ОПТИМАЛЬНОЙ ТРАЕКТОРИИ ДЛЯ ОХРАНЫ АКВАТОРИИ CONSTRUCTION OF THE OPTIMUM TRAJECTORY FOR THE WATER AREA PROTECTION Рассмотрена задача, имеющая важное прикладное значение для автоматизации охраны акваторий бухт и устьев рек северной территории России. Сначала в виде алгоритма, а потом и в виде блок-схемы представлена автоматизированная процедура построения оптимальной в определенном смысле кривой линии, по которой должно двигаться средство наблюдения внутри охраняемой акватории. This paper examines the problem that has a practical importance for the automation of the security protection of water areas of bays and estuaries of the northern territory of Russia. First, in the form of an algorithm, and then as a block-scheme an automated procedure for constructing an optimal (in certain sense) curve is introduced. Along this curve a security surveillance device should move within the protected water area. 1. Введение Оценка уязвимости портовых средств и портов Российского Севера показывает [1], что защищенность большинства этих объектов находится на приемлемом уровне, если рассматривать их со стороны суши. Однако со стороны акваторий наблюдается угрожающий недостаток систем охраны и безопасности. Надводная поверхность на небольших расстояниях на большинстве объектов просматривается достаточно хорошо силами охраны, что способствует обнаружению нарушителей. А на реализацию необходимых мер реагирования часто оказывается недостаточно времени. Что касается подводной части большинства акваторий (бухт, заливов, губ, проливов) и пространств вокруг буровых установок и мест хранения углеводородов, то ситуация с обеспечением безопасности еще хуже. Наблюдается значительный недостаток современных средств обнаружения и противодействия. Задача стационарного наблюдения осложняется тем, что в силу климатических и широтных явлений бухты заливов могут менять конфигурацию. Береговая линия и рельеф дна также меняются во времени. В этих условиях одним из средств охраны служит патрульный катер, оборудованный как надводными, так и подводными средствами наблюдения. С целью улучшения безопасности портовых средств, портов и стационарных буровых установок в Воронежском институте МВД разработана комплексная система подводного-надводного обнаружения злоумышленников [2], обеспечивающая: • полный контроль проливов, допускающих проникновение в арктические моря, где разворачивается полномасштабная деятельность нашей нефтегазовой отрасли, обнаружение чужих судов и подводных лодок как возможных средств доставки диверсантов — боевых пловцов, какой-либо другой, несовместимой с безопасностью, деятельности; • защита акваторий от средств доставки диверсантов: малых подводных лодок, боевых и быстроходных катеров, шлюпок из радиопрозрачных материалов и прочее, 255 Вестник Воронежского института МВД России №1 / 2015 которые, в свою очередь, могли быть доставлены в данный район более крупными и мореходными транспортными средствами — дальний рубеж. Технические возможности системы позволяют выносить дальний рубеж до 40 км в море (на акваторию); • защита объекта нефтегазовой отрасли от проникновения непосредственно через прилегающую акваторию диверсантов — боевых пловцов — ближний рубеж. В данном варианте предусматривается возможность управления гранатомётом и другими средствами задержания и уничтожения подводных диверсантов или воздействия, обеспечивающего срыв террористической атаки; • защита объекта от проникновения через прилегающую акваторию подводных пловцов посредством создания дальнего и ближнего рубежей, в виде интегрированной системы, включающей в себя указанные и другие средства освещения подводной обстановки и ЦУ, средства поражения, комплексно решающей задачу охраны объектов со стороны морской акватории в автоматизированном (полуавтоматизированном) режиме. В данной работе мы приводим вариант оптимальной траектории движения патрульного катера в зависимости от очертаний бухты. Предполагается отсутствие сильных течений. Траектория рассчитывается с помощью компьютерной программы с коррекцией оператора. Цель построения — экономия времени, средств (например, ГСМ), регламентация движения. В дальнейшем по данной траектории планируется движение автоматического средства наблюдения. 2. Описание целей, характеризующих критерий оптимальности Решение задачи начинается с изучения карты бухты, залива или дельты реки (объекта), являющейся охраняемой территорией. Наносим на береговую линию точки на одинаковом расстоянии друг от друга. Задача сводится к определению оптимальной траектории движения патрульного катера внутри многоугольника, который может быть необязательно выпуклым (рис. 1). После этой процедуры охраняемый (патрулируемый объект) можно представить многоугольником и решать задачу определения вида оптимальной траектории движения патрульного катера для многоугольника. Заметим, что при построении этого многоугольника нужно и можно учитывать расположение мелей, подводных препятствий и рельеф дна. Для патрулирования акватории применяется катер. Пусть целью является прослеживание с катера границ многоугольника, и наблюдение (локацию) одновременно можно вести как в сторону береговой линии, так и в противоположном направлении. Основное правило. Считается, что приоритетным, проверяемым в первую очередь, является береговая линия. В нашем случае - стороны многоугольника. Затем по мере удаления от берега приоритетность проверки площади акватории уменьшается. То есть в первую очередь проверяется береговая линия, затем прибрежная зона, потом более удаленная от берега полоса акватории и т.д. Это требование понятно, так как чем дальше обнаружен нарушитель, тем больше времени есть для его задержания. Поэтому оптимальной на первом этапе является линия движения, повторяющая контуры многоугольника и расположенная внутри на расстоянии R, далее процесс повторяется, а за исходную, береговую линию принимаем полученный вложенный многоугольник, расположенный на расстоянии 2 R . В итоге получаем рисунок с оптимальной траекторией (рис. 2). В случае, если залив в определенных местах сужается до размеров, сопоставимых с 2 R, разбиение каждой части акватории производится авто256 Научные сообщения номно (рис. 3). Патрульный катер оснащен средствами надводного слежения на расстоянии, не превосходящем R, а также подводного слежения на расстоянии, не превосходящем r. Надводные и подводные линии можно вычерчивать на отдельных картах. Побережье акватории разбивается точками M k с координатами xk , y k k 1,2,..., n . В дальнейшем береговая линия заменится на многоугольник с вершинами в точках M k . Разбиение производится настолько мелко, чтобы при контроле сторон многоугольника под контролем находилась и береговая линия. Производится так называемая векторизация акватории (рис. 2). 3. Описание алгоритма и математической модели построения траектории движения патрульного катера Распишем алгоритм построения по шагам. 1) Шаг 1. Описание сторон многоугольника. Воспользуемся формулой для отклонения, уравнение прямой перепишем в виде y yk y yk xk k 1 y k 0 . y x k 1 (1) xk 1 xk xk 1 xk В другом виде y ( x xk ) z k y k 1 z k . (2) y yk . z k tg k k 1 x k 1 x k Знак в формуле (2) выбирается так, чтобы при движении против часовой стрелки линия АБ проходила внутри многоугольника параллельно прямой (1). Задачей программирования для автоматизированного начертания оптимальной линии движения катера является выбор знака при последнем слагаемом так, чтобы линия движения катера была внутренней (лежала в акватории). Это можно сделать, прослеживая угол наклона прямой (1). Далее определяются точки пересечения соседних прямых и строится вписанный многоугольник. Знак выбирается с помощью определения центра тяжести выпуклого многоугольника. ri mi . (3) rc i mi Здесь i 2) Шаг 2. После определения центра тяжести вдоль береговой линии строится первая линия оптимального движения, затем снова определяется центр для меньшего многоугольника (вписанного) и строится второй вписанный многоугольник. И так далее до момента, когда расстояние между точками станет меньше радиуса видения надводного средства. 3) Шаг 3. Сужение многоугольников может привести к сокращению числа сторон. Эта задача решается путем определения точек пересечения соседних прямых и сравнением длин отрезков — сторон многоугольника. 4) Шаг 4. Для невыпуклых многоугольников проводится кластеризация множества точек-вершин и невыпуклый многоугольник разбивается на несколько выпуклых. 257 Вестник Воронежского института МВД России №1 / 2015 Проводится оптимальная маршрутизация в каждом из них, и путем объединения маршрутов создаётся один единый маршрут по всей акватории. Рис. 1. Определение оптимальной траектории движения Рис. 2. Акватория в виде выпуклого многоугольника 258 Научные сообщения Рис. 3. Две составные части двух выпуклых многоугольников Если акватория представляет собой явно не выпуклый многоугольник, то дополнительными линиями многоугольник акватории разбивается на части, представляющие собой выпуклые многоугольники. В них рисуется система оптимальных линий. Затем искусственные дополнительные линии убираются, и линии соответствующих траекторий соединяются по кратчайшему расстоянию (рис. 4, стрелка в обе стороны). Рис. 4. Разбиение невыпуклого многоугольника и соединение траекторий 259 Вестник Воронежского института МВД России №1 / 2015 1. Блок-схема по реализации алгоритма построения Задание точек многоугольника Есть вершина, у которой любая вершина многоугольника лежит ближе соседних вершин да нет Разбиение на несколько многоугольников Проход всех вершин многоугольника Вершина находится на расстоянии, меньшем, чем R от центра Инвертирование вершин многоугольника и соединение последней вершины старого многоугольника и первой вершины нового да нет да Вершина последняя нет Выбор ребра До любой другой вершины расстояние меньше 2R нет да Есть вершина не соседняя да Вычисление центра масс многоугольника Определение, с какой стороны центр нет Объединение вершин и создание нового ребра Определение линии параллельной текущей на расстоянии 2R Запись вершин нового многоугольника Завершение процедуры 260 Научные сообщения Для практической реализации алгоритма блок-схемы авторы использовали язык Java. Мы не приводим в этой статье листинг имеющейся у нас программы на языке Java [2,3], так как со временем пользователь может воспользоваться другой, более современной языковой оболочкой. Авторы могут предоставить программу по автоматизированному определению линии движения для любого конкретного картографического материала. Выводы. В зависимости от конфигурации и других свойств акватории получена в определённом смысле оптимальная линия движения патрульного катера по охране береговой линии и прилегающей акватории. Зная линию, экономящую время движения и ГСМ, её можно и нужно регламентировать и прослеживать нарушения по неоправданному отклонению от маршрута. Учитывая непостоянство береговой линии, изменчивость площади акватории и климатические условия, приоритетным на территории Северного морского пути остаётся дежурство на охранном катере. Для дальнейшего развития средств и способов охраны необходимо обеспечение оптимального движения автоматических спецсредств наблюдения и охраны акваторий бухт и устьев рек Северного морского пути. Работа выполнена при поддержке РФФИ (грант №14-01-001410). ЛИТЕРАТУРА 1. Методические рекомендации по организации несения службы сотрудниками подразделений вневедомственной охраны с применением комплекса инженернотехнических средств системы физической защиты (морской порт Дудинка). — Воронеж: Воронежский институт МВД России, 2013. — 308 с. 2. Кей Хортман, Гари Корнелл. Java2. — М.: Вильямс, 2012. 1 — 804 с.; 2 — 970 с. 3. Кетти Сьера, Берт Бейтс. Head First Java. — М.: Эксмо, 2012. — 707 с. REFERENCES 1. Metodicheskie rekomendatsii po organizatsii neseniya sluzhbyi sotrudnikami podrazdeleniy vnevedomstvennoy ohranyi s primeneniem kompleksa inzhenerno-tehnicheskih sredstv sistemyi fizicheskoy zaschityi (morskoy port Dudinka). — Voronezh: Voronezhskiy institut MVD Rossii, 2013. — 308 s. 2. Key Hortman, Gari Kornell. Java2. — M.: Vilyams, 2012. — 1 — 804 s.; 2 — 970 s. 3. Ketti Sera, Bert Beyts. Head First Java. — M.: Eksmo, 2012. — 707 s. 261 Вестник Воронежского института МВД России №1 / 2015 СВЕДЕНИЯ ОБ АВТОРАХ Белый Георгий Юрьевич. Бакалавр математики. Воронежский государственный университет. E-mail: man240893@mail.ru Россия, 394052, г. Воронеж, пл. Университетская, 1. Тел. 89204151446. Родин Владимир Александрович. Профессор кафедры высшей математики. Доктор физико-математических наук, профессор. Воронежский институт МВД России. E-mail: vm@vimvd.ru Россия, 394065, г. Воронеж, проспект Патриотов, 53. Тел. (473) 2005-211. Bely Georgy Yuryevich. Bachelor of mathematics. Voronezh State University. E-mail: man240893@mail.ru Work address: Russia, 394052, Voronezh, University Sq., Tel. 89204151446. Rodin Vladimir Alexandrovich. Full Professor of the chair of High mathematic. Doctor of Sciences (physics and mathematics), professor. Voronezh Institute of the Ministry of the Interior of Russia. E-mail: vm@vimvd.ru Work address: Russia, 394065, Voronezh, Prospect Patriotov, 53. Tel. (473) 2005-211. Ключевые слова: компьютерная графика; компьютерное моделирование; модели оптимизации; охрана акватории. Key words: computer graphics; computer modelling; protection of water area. УДК 519.876.5+624.01 ИЗДАНИЯ ВОРОНЕЖСКОГО ИНСТИТУТА МВД РОССИИ Щербакова И.В. Организация периметральных систем безопасности объектов: учебное пособие / И.В. Щербакова, С.А. Гречаный, С.В. Шишкин. — Воронеж: Воронежский институт МВД России, 2014. — 94 с. Рассматривается методика и порядок организации охраны объектов с использованием периметральных систем безопасности. Предназначено для курсантов радиотехнического факультета и слушателей факультета заочного обучения, а также может быть полезно слушателям факультетов профессионального обучения и дополнительного профессионального образования. 262