5.1. поние силы
advertisement

5. Динамика материальной точки
5.1. Понятие силы
Прежде чем приступить к изложению основных законов динамики материальной точки
целесообразно уточнить некоторые важные для дальнейшего рассмотрения понятия и
определения.
Понятие силы. В соответствие с классическим определением, кочующим из учебника в
учебник, сила является мерой механического взаимодействия тел, определяющая
интенсивность и направление такого взаимодействия.
Ели при действии силы на тело происходит изменение его механического состояния,
например, тело, начинает двигаться или изменяет параметры своего движения, то говорят о
динамическом проявлении силы. Но такое наблюдается не всегда. Большой камень,
расположенный на песке массой 500 кг один даже очень тренированный человек не сможет
переместить, как ни старайся. Это статическое проявление силы. А вот если лёгкий камень
бросить под углом к горизонту, то будет наблюдаться изменение первоначального направления
полёта за счёт гравитационного взаимодействия массы камня с массой Земли. Это уже
динамическое проявление сил.
Фундаментальная значимость понятия силы в механике обусловлена тем обстоятельством,
что силы можно количественно измерять, чаще всего простыми и доступными методами
сравнения. Опытным путём было установлено, что статическое и динамическое действие силы
зависит от трёх её параметров: модуля, направления и точки приложения.
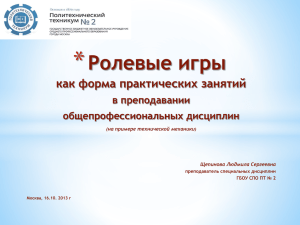
Графически сила изображается в виде направленного
отрезка (вектора) направление которого совпадает с
линией действия силы АВ (рис. 5.1), длина отрезка
соответствует величине (модулю) силы в выбранном
масштабе. Начало вектора силы, как правило, совпадает с
точкой приложения М.
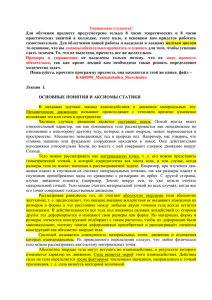
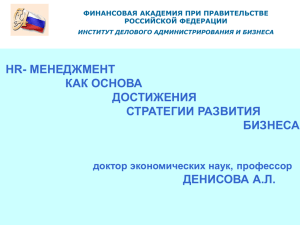
Если на тело действует не одна, а несколько сил, то
говорят о системе сил. На рис. 5.2 изображена система
{
r r r r
}
четырёх сил F1 , F2 , F3 , F4 , линии действия которых
пересекаются в одной точке. Система сходящихся сил
является
наиболее
простой
для
определения
эквивалентного действия, которое оценивается на основе
трёх аксиом.
Аксиома 1. Абсолютно твёрдое свободное тело
находится в равновесии под действием двух сил только в
том случае, если эти силы равны по модулю и имеют
противоположное направление по общей линии действия.
Аксиома 2. Действие данной системы сил не
изменится если к ней прибавить или отнять систему сил
эквивалентную нулю.
Вторая аксиома имеет два важных следствия.
Следствие 1. Не изменяя параметров действующей
силы, точку её приложения можно переносить вдоль
линии действия силы в пределах данного тела.
Следствие 2. Равнодействующая и уравновешивающая
силы равны по модулю и направлены в противоположные
стороны по общей линии действия.
Аксиома
3.
Равнодействующая
двух
сил,
приложенных к телу в одной и той же точке, равна длине
диагонали параллелограмма, построенного на векторах
91
Рис. 5.1. Обозначение силы
Рис. 5.2. Система сходящихся сил
сил и направлена вдоль диагонали.
Используя приведенные выше аксиомы, которые были известны ещё во времена Архимеда,
можно достаточно просто находить равнодействующую нескольких сил. Наиболее простым для
анализа является система сходящихся сил, т.е. системы сил, линии действия которых
пересекаются в одной точке (рис. 5.2).
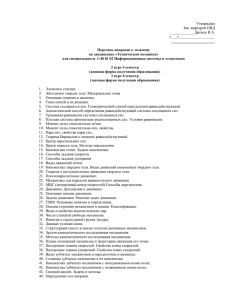
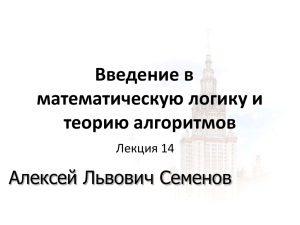
Покажем методику геометрического нахождения равнодействующей на примере системы,
{
r r
}
состоящей из трёх сил F1 , F2 , F3 . Используя следствие 1 аксиомы 2, перенесём по линиям
действия силы таким образом, чтобы начало их векторов совпадало с точкой О. Затем построим
r
параллелограмм на векторах сил F1 , F2 и построим его диагональ, которая будет являть собой
r
r
r
r
r
сумму F1 + F2 . Далее построим второй параллелограмм на векторах F1 + F2 и F3 , диагональ
r
этого параллелограмма будет являться равнодействующей R анализируемой системы трёх
сходящихся сил.
Рис. 5.3. Определение равнодействующей силы
Численное значение равнодействующей силы определяется по следующей схеме с
использованием уравнения (2.4)
(
)
r r
r r
F1 + F2 = F* = F12 + F22 + 2F1F2 cos F1 ; F2 ,
r
r r
R = F32 + F*2 + 2F3F* cos F3 ; F* .
(
92
)
(5.1)
(5.2)