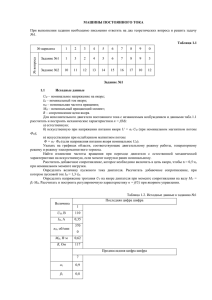
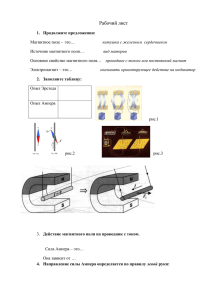
Исследование двигателя постоянного тока параллельного
advertisement

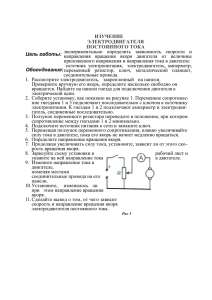
Московский государственный технический университет им. Н.Э. Баумана Л.В. Ролдугин, Ю.Н. Зорин Исследование двигателя постоянного тока параллельного возбуждения Методическое указания к лабораторной работе № 13 по курсу “Электротехника и электроника” Под редакцией А.Б. Красовского Издательство МГТУ 2001 2 Цель работы - осуществление пуска и изучение способов изменения направления вращения двигателя, технических данных, методов регулирования частоты вращения, основных свойств, а также характеристик двигателя. 1. Описание лабораторной установки Лабораторная установка, электрическая схема которой приведена на рис.1, содержит двигатель постоянного тока ДПТ, электромагнитный тормоз ЭТ, измеритель момента, три управляемых выпрямителя UD1 ... UD3, измерительные приборы, резисторы rп и rд , тахометр, коммутирующую аппаратуру: автоматические выключатели АВ5...АВ8, кнопки ПУСК и СТОП, контакторы К1...К3, реле времени РВ1 и РВ2, выключатели S1 и S20 , перемычку П3. Для пуска и выключения двигателя используются контакторы и реле времени (см. далее разд.3, п.3). Катушку контактора К1 включают и выключают кнопками ПУСК и СТОП. Электромагнитный тормоз ЭТ создает тормозной момент на валу двигателя. Значение момента можно изменять регулятором R1 управляемого выпрямителя UD1. Резисторы rп и rд ограничивают пусковой ток двигателя (см. далее разд.3, п.3). ∼ 380 В АВ5 UD1 R1 - АВ7 АВ6 UD2 R2 + ∼ 220 В - + АВ8 UD3 R3 - 0 ...220 В + СТОП ПУСК S1.1 S20.1 K1 K1.3 S1.2 Н⋅м К1.1 К1.2 П3 П ДИ K1.4 V2 А4 К2.1 rп К3 rд PB1 PB 1 K2 K2.2 PB2 PB 2 S20.2 K3 А5 Об/ мин ЭТ Ш1 Ш2 Я1 Я2 Я1 Я2 Ш1 Ш2 ДПТ Рис.1 Выключателем S1 предотвращается возможность пуска двигателя при включенном электромагнитном тормозе (см. далее разд.3, п.3). Выключателем S20 можно включить резистор rд в цепь якоря двигателя (см. далее разд.3, п.3). Перед пуском двигателя выключатели S1 и S20 необходимо ВКЛЮЧИТЬ, а после пуска выключатель S1 перевести в положение ВЫКЛЮЧЕНО. Регулятором R2 (выпрямителя UD2) можно изменять ток в цепи возбуждения двигателя. Напряжение на якоре двигателя регулируется с помощью выпрямителя UD3 (регулятор R3). 3 Измеритель момента, состоящий из индуктивного датчика ДИ, преобразователя П, измерительного прибора Н·м и механизма передачи изменения положения индуктора тормоза к ДИ, позволяет измерить момент, создаваемый тормозом (см. далее разд.3, п.8). На стенде установлен также цифровой тахометр, с помощью которого измеряется частота вращения двигателя. Большая часть электрической цепи лабораторной установки смонтирована. На рис.1 соответствующая ей часть схемы обведена штрихпунктирной линией. Для проведения эксперимента обмотку якоря и обмотку возбуждения двигателя соединяют с одноименными гнездами стенда, а также устанавливают перемычку П3. Для исключения аварийного режима работы стенда при пуске двигателя (после разрешения преподавателя) необходимо соблюдать представленную последовательность действий: 1) регулятор R1 повернуть до упора против часовой стрелки, чтобы напряжение на выходе выпрямителя UD1 после его включения было близко к нулю, включить АВ5; 2) включить АВ6 и с помощью регулятора R2 установить максимальный ток в обмотке возбуждения (пуск с недостаточным током возбуждения может привести к разносу двигателя); 3) включить выключателем АВ7 выпрямитель VDЗ и регулятором RЗ установить напряжение 220 В; 4) включить цепь управления выключателем АВ8. После этого можно осуществлять пуск двигателя нажатием на кнопку ПУСК. 2. Порядок выполнения работы 1. Изучить электрическую схему установки (см. рис.1), определить назначение всех ее элементов, найти их на лабораторном стенде (см. разд.1), записать технические данные исследуемого двигателя (см. паспорт на двигателе). 2. Изучить последовательность действий при пуске двигателя (см. разд.1), а также необходимые переключения в схеме для изменения направления вращения двигателя (см. далее разд.3, п.2). 3. Соединить обмотку якоря и обмотку возбуждения двигателя с одноименными гнездами стенда, установить перемычку П3. 4. Отчитаться перед преподавателем в выполнении пп.1,2,3, затем осуществить пуск двигателя при М = 0. 5. Провести опыт нагрузки для выяснения зависимостей частоты вращения двигателя n и тока якоря Iя, от момента на валу М, а также коэффициента полезного действия от мощности на валу Р2 при номинальных напряжении на зажимах якоря Uн и токе возбуждения Iвн. Результаты опыта занести в табл.1. Методические указания: а) установить номинальный ток возбуждения Iвн = 0,55 А и поддерживать его во время опыта постоянным; б) установить номинальное напряжение на зажимах якоря Iн = 220В; в) измерения провести при нагрузках (моментах), которые соответствуют следующим значениям тока якоря: I Я = I Н ; I Я = 0.75 I Н ; I Я = 0.5 I Н ; I Я = 0.25 I Н ; I Я = I ХХ . Здесь Iн - номинальный ток двигателя; Iхх - ток якоря при работе двигателя в режиме холостого хода (М = 0); г) после получения экспериментальных данных двигатель не выключать, момент установить равным нулю. Таблица 1 4 Измерено U = Uя, В Iв = Iвн А Iя, А Вычислено М, Н·м n, мин-1 I, А P1, кВт P2, кВт КПД 6. Провести второй опыт нагрузки (U = Uн, Iв = Iвн) для определения характера изменения зависимостей n(М) и IЯ(М) при включенном в цепь якоря добавочном резисторе rд. Результаты опыта занести в табл.2. Методические указания: а) включить в цепь якоря резистор rд выключателем К3, переведя его в положение ВЫКЛЮЧЕНО; б) ток возбуждения при проведении эксперимента поддерживать номинальным; в) измерения проводить при значениях тока якоря Iя, указанных в п.в) методических указаний к п.5. Таблица 2 U = Uя , В Iв = Iвн, А I я, А М, Н·м n, мин-1 7. Выполнить третий опыт нагрузки (Iв = Iвн, rд = 0) для определения характера изменения зависимостей n(М) и IЯ(М) при напряжении на зажимах якоря меньше номинального значения. Результаты опыта занести в табл.3. Методические указания: а) установить напряжение на якоре V = (130…150) В; б) выключить резистор rд (выключатель S20 перевести в положение ВКЛЮЧЕНО); в) ток возбуждения во время опыта поддерживать номинальным; г) измерения провести при значениях тока якоря Iя, указанных в п.в) методических указаний к п.5. Таблица 3 U, В Iв = Iвн, А I я, А М, Н·м n, мин-1 8. Провести четвертый опыт нагрузки (U = Uн, rд = 0 для определения характера изменения зависимостей n(М) и IЯ(М) при ослабленном магнитном потоке Ф. Результаты опыта занести в табл.4. Методические указания: 5 а) установить ток возбуждения примерно Iв = 0,4 А (не меньше) и поддерживать его постоянным; б) установить на зажимах якоря номинальное напряжение; в) измерения провести при тех же значениях тока якоря Iя, что и в предыдущих опытах (см. пп.5-7). После завершения эксперимента выключить двигатель (с помощью кнопки СТОП), а затем источник напряжения стенда. Результаты опытов (см. пп.5-8) показать преподавателю. Таблица 4 U = Uя, В I в, А I я, А М, Н·м n, мин-1 9. Вычислить по результатам табл.1 потребляемую мощность P 1 , мощность на валу P 2 , коэффициент полезного действия. Результаты занести в табл.1. 10. Построить по результатам табл.1-4 в общей системе координат механические характеристики n(М). 11. Построить по результатам табл.1-4 в общей системе координат зависимости IЯ(М). 3. Теоретические сведения * 1. Классификация двигателей по способу возбуждения Свойства двигателей постоянного тока существенно зависят от того, как изменяется их магнитный поток с изменением нагрузки на валу. Эта зависимость определяется схемой включения их обмоток возбуждения. Различают двигатели параллельного (шунтовые), последовательного (сериесные), смешанного (компаундные) возбуждений. В данной работе изучается двигатель параллельного возбуждения, который часто включают по схеме, представленной на рис.2. Как видно из рис.2, его обмотку возбуждения Ш1 - Ш2 включают в сеть постоянного напряжения параллельно обмотке якоря Я1 - Я2. Важной особенностью двигателя параллельного возбуждения является то, что его ток возбуждения не зависит от механической нагрузки двигателя: U IВ = . rВ Если не учитывать некоторого изменения магнитного потока Ф вследствие реакции якоря, то при Iв = соnst можно считать Ф= const. На практике, например в электроприводах прокатных станов, используют и другую схему включения двигателя параллельного возбуждения: обмотку возбуждения и обмотку якоря двигателя питают от разных источников постоянного напряжения. Это делают для того, чтобы иметь возможность независимо регулировать напряжение на зажимах якоря. При такой схеме включения двигателя ток возбуждения Iя также не зависит от момента на валу двигателя. Особенность включения двигателя на лабораторном стенде (см. рис.1) - источник напряжения цепи возбуждения является регулируемым. * Борисов Ю.М., Липатов Д.Н., Зорин Ю.Н. Электротехника. М., 1985. 6 + I U Iя E rя Я1 Iв Ш1 - Я2 Ш2 Рис.2 2. Устройство и принцип действия двигателей постоянного тока Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.3. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 8, на дополнительных - обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины. На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря. Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают. 1 10 9 8 2 n Ф 3 4 5 6 7 Рис.3 Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода. Кроме двигателей, имеющих два главных полюса, существуют машины 7 постоянного тока с четырьмя и бόльшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток. Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь: M = k M ⋅ Ф ⋅ I Я , (1) E = k e ⋅ Ф ⋅ n , (2) где КМ - коэффициент, зависящий от конструктивных параметров машины; Ф магнитный поток одного полюса; I Я - ток якоря. Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель, то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря: U − E U − k eФ n = , (3) IЯ = rЯ rЯ где rЯ - сопротивление якоря. Следствием уменьшения тока IЯ является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться. Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения. 3. Пуск двигателей Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда n = 0 и E = k eФ n = 0 , IЯ = U . rЯ Так как сопротивление rЯ невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря. Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения. В лабораторной установке (см. рис.1) пуск двигателя осуществляется автоматически в функции времени. Пусковой ток ограничивается резисторами rп и rд . На рис.1 показано исходное состояние контактов: выключателей - когда они выключены; кнопок - при отсутствии на них воздействия; контакторов и реле времени при отсутствии в их катушках тока. При воздействии на кнопку ПУСК (при включенных АВ5.. .АВ8, S1, S20) катушка контактора К1 оказывается включенной в сеть. Контактор срабатывает и его контакты замыкаются. Контактами К1.1 и К1.2 обмотка якоря подключается к источнику UD3, контактом К1.3 шунтируются кнопка ПУСК, контакты S1.1 и S20.1 выключателей S1 и S20. Поэтому воздействие на кнопку ПУСК можно прекратить, выключатель S1 перевести в положение ВЫКЛЮЧЕНО 8 (выключатель S20 переводят в положение ВЫКЛЮЧЕНО при получении резистивной механической характеристики). Так как после указанных переключений контакты К2.1 и К3 остаются разомкнутыми, в цепь якоря двигателя оказываются включенными резисторы rп и rд. Таким образом, пусковой ток якоря U . I ЯП = rЯ + rП + rД По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря IЯ. Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. В лабораторной установке это происходит следующим образом. При срабатывании контактора К1 катушка реле времени РВ1 также включена в сеть. Реле времени срабатывает и замыкает свой контакт, но с некоторой задержкой. Эта задержка необходима для того, чтобы частота вращения якоря достигла некоторого значения. После замыкания контакта РВ1 срабатывает контактор К2, который контактом К2.1 шунтирует резистор rп, а контактом К2.2 включает в сеть катушку реле времени РВ2. Таким образом, разгон двигателя продолжается только при включенном в цепь якоря резисторе rд. Спустя некоторое время после срабатывания реле времени РВ2 замыкается его контакт в цепи катушки контактора К3, который срабатывает (контакт S20.2 замкнут, так как выключатель S20 включен) и шунтирует резистор rд. Разгон двигателя продолжается. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным. 4. Технические данные двигателей В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи, мощность Pн, частота вращения nн, ток Iн, КПД. Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя. Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан: I Н = I ЯН + I ВН , где Iян — ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении. Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают I ЯН = I Н . Номинальная мощность Рн - это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн. Частота вращения nн, и КПД соответствуют работе двигателя с током Iн, напряжением Uн без дополнительных резисторов в цепях двигателя. 9 В общем случае мощность на валу P2, момент М и частота вращения n связаны соотношением: P2 = M ⋅n . 9550 Потребляемая двигателем из сети мощность Р1, величины P2, КПД, U, I связаны соотношениями: η= P2 , P1 P1 = UI , где I = I Я + I В . Очевидно, что эти соотношения справедливы также и для номинального режима работы двигателя. 5. Механические характеристики и регулирование частоты вращения Важнейшей характеристикой двигателя является механическая n(M). Она показывает, как зависит частота вращения двигателя от развиваемого момента. Если к обмоткам двигателя подведены номинальные напряжения и отсутствуют дополнительные резисторы в его цепях, то двигатель имеет механическую характеристику, называемую естественной. На естественной характеристике находится точка, соответствующая номинальным данным двигателя (Мн, Ря и т.д.). Если же напряжение на обмотке якоря меньше номинального, либо Iв < Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения. Преобразовав выражение (3) относительно частоты вращения, получим уравнение электромеханической характеристики n(I я ): U − I Я rЯ I r U n= = − Я Я . (7) k eФ k eФ k eФ После замены в уравнении (7) тока Iя согласно формуле (1), получим уравнение механической характеристики n(М): rЯ U −M . (8) n= k eФ ke k M Ф 2 При Ф = соnst, электромеханическая n(Iя) и механическая n(М) характеристики двигателя параллельного возбуждения представляют собой прямые линии. Так как за счет реакции якоря магнитный поток немного изменяется, то характеристики в действительности несколько отличаются от прямых. При работе вхолостую (М = 0) двигатель имеет частоту вращения холостого хода, определяемую первым членом уравнения (8). С увеличением нагрузки n уменьшается. Как следует из уравнения (8), это объясняется наличием сопротивления якоря rя. Поскольку rя не велико, частота вращения двигателя при увеличении момента изменяется мало, и двигатель имеет жесткую естественную механическую характеристику (рис.4, характеристика 1). Из уравнения (8) следует, что регулировать частоту вращения при заданной постоянной нагрузке (М = const) можно тремя способами: а) изменением сопротивления цепи якоря; 10 б) изменением магнитного потока двигателя; в) изменением напряжения на зажимах якоря. n n4 4 n1 n3 n2 1 3 2 0 M M1 Рис. 4 Для регулирования частоты вращения первым способом в цепь якоря. должно быть включено добавочное сопротивление rд. Тогда сопротивление в уравнении (8) необходимо заменить на rя + rд. Как следует из уравнения (8), частота вращения n связана с сопротивлением цепи якоря rя + rд при постоянной нагрузке (М = const) линейной зависимостью, т.е. при увеличении сопротивления частота вращения уменьшается. Разным сопротивлениям rд соответствуют различные искусственные механические характеристики, одна из которых приведена на рис.4 (характеристика 2). С помощью характеристики 2 при заданном моменте М1 можно получить частоту вращения n2. Изменение частоты вращения вторым способом осуществляется с помощью регулируемого источника напряжения UD2. Изменяя его напряжение регулятором R2, можно изменить ток возбуждения IВ и тем самым магнитный поток двигателя. Как видно из уравнения (8), при постоянной нагрузке (М = соnst) частота вращения находится в сложной зависимости от магнитного потока Ф. Анализ уравнения (8) показывает, что в некотором диапазоне изменения магнитного потока Ф уменьшение последнего приводит к увеличению частоты вращения. Именно этот диапазон изменения потока используют при регулировании частоты вращения. Каждому значению магнитного потока соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.4 (характеристика 4). С помощью характеристики 4 при моменте М1 можно получить частоту вращения n4. Чтобы регулировать частоту вращения изменением напряжения на зажимах якоря, необходимо иметь относительно мощный регулируемый источник напряжения. На лабораторном стенде напряжение на зажимах якоря изменяется с помощью регулятора R3 источника UDЗ (см. рис.1). Из уравнения (8) следует, что частота вращения при постоянном моменте на валу линейно зависит от напряжения: при уменьшении напряжения частота вращения снижается. Каждому значению напряжения соответствует искусственная механическая характеристика двигателя, одна из которых приведена на рис.4 (характеристика 3). С помощью характеристики 3 при заданном моменте М1 можно получить частоту вращения n3. 6. Зависимость тока якоря от момента на валу двигателя Поскольку у двигателя параллельного возбуждения I в = const и, в идеале, Ф = соnst, то согласно выражению (1), между током Iя и моментом М существует линейная зависимость (рис.5, прямая 1). Очевидно, что зависимость (1) справедлива при любом сопротивлении цепи якоря двигателя. Работе двигателя с различными сопротивлениями цепи якоря при одном и том же моменте, например М1 (см. рис.5), соответствует одно 11 и тоже значение тока якоря IЯ1. Меньшему значению тока возбуждения Iв (магнитного потока Ф) соответствует прямая 2 (см. рис.5). В этом случае при том же значении момента, например, М1 ток якоря имеет бόльшее значение (IЯ2). Из выражения (1) следует, что прямая 1 (см. рис.5) соответствует любым напряжениям на зажимах якоря двигателя. Таким образом, при работе двигателя с различными напряжениями на зажимах якоря одному и тому же моменту, например моменту М1 (см. рис.5), соответствует один и тот же ток якоря (IЯ1). Следует обратить внимание на то, что в реальных условиях при работе двигателей вхолостую (М = 0) в обмотке якоря существует небольшой ток холостого хода Ixx. Он обусловлен наличием сил трения и потерь в стали магнитопровода якоря двигателя. Iя 2 IЯ2 1 IЯ1 M 0 M1 Рис. 5 7. КПД двигателей постоянного тока Коэффициент полезного действия является важнейшим показателем двигателей постоянного тока. Чем он больше, тем меньше мощность Р и ток I, потребляемые двигателем из сети при одной и той же механической мощности. В общем виде зависимостьть η ( P2 ) такова: η= P2 P2 = , (9) P1 P2 + ΔPЯ + ΔPВ + ΔPC + ΔPмех где ΔPЯ = I Я2 rЯ - потери в обмотке якоря; ΔPВ = I В2 rВ - потери в обмотке возбуждения; ΔPC - потери в магнитопроводе якоря; ΔPмех - механические потери. Потери мощности ΔPВ не зависят, ΔPC и ΔPмех мало зависят от нагрузки двигателя. Таким образом, зависимость η ( P2 ) представляет собой весьма сложную характеристику, так как с изменением Р2 в выражении (9) изменяются и потери ΔPЯ . Параболическая зависимость ΔP от P2 и определяет характер изменения η от P2 . График зависимости η ( P2 ) рис.6 получают на основании расчетных или опытных данных. η P2 0 Pн Рис. 6 12 Двигатели рассчитываются таким образом, чтобы максимальное значение КПД было в области, близкой к номинальной мощности. Эксплуатация двигателей при малых нагрузках нежелательна вследствие малых значений rя. Значения КПД двигателей с различными способами возбуждения и мощностью от 1 до 100 кВт при номинальной нагрузке разные и составляют в среднем 0,8. 8. Электромагнитный тормоз и измеритель момента Электромагнитный тормоз состоит из стального якоря П-образного сечения, закрепленного на валу двигателя, и индуктора (электромагнита), расположенного на неподвижной оси внутри якоря. В якоре, вращающемся в магнитном поле электромагнита, индуцируется ЭДС и возникают вихревые токи, а также токи перемагничивания. Взаимодействие этих токов с магнитным полем электромагнита создает тормозной момент на валу двигателя. Меняя ток в катушке электромагнита, можно изменять тормозной момент. На электромагнит действует такой же по значению момент, под действием которого он поворачивается на соответствующий угол, преодолевая силу сопротивления пружины. При этом изменяется положение магнитопровода, а следовательно, и индуктивность ДИ (см. рис.1). Это приводит к изменению выходного напряжения преобразователя, измеряемого вольтметром, шкала которого отградуирована в ньютон-метрах. 9. Цифровой тахометр Состоит из датчика импульсов, преобразователя и индикатора. Датчик импульсов установлен вблизи вала двигателя, на котором закреплен диск с шестьюдесятью выступами. При вращении диска выступы входят в зазор датчика, изменяя параметры его входной цепи. В результате на выходе датчика появляются импульсы напряжения, число которых в единицу времени пропорционально частоте вращения вала. Количество импульсов подсчитывается электронным счетчиком, а затем эта информация обрабатывается преобразователем. Преобразованный сигнал поступает на индикатор. 4. Отчет по работе Отчет должен содержать электрическую схему и все материалы в соответствии с разд.2. При изображении графических зависимостей по осям координат необходимо нанести равномерные шкалы, нуль которых должен совпадать с началом координат. 13 КОНТРОЛЬНЫЕ ВОПРОСЫ 1. Каково устройство двигателя постоянного тока? 2. Каков принцип действия двигателя постоянного тока? 3. Почему пусковой ток двигателя I П в 10...30 раз больше номинального, а ток в режиме холостого хода I ХХ примерно в 20 раз меньше номинального? 4. Каково назначение резисторов rП и rД (см. рис.1)? 5. Какие переключения следует осуществить для изменения направления вращения двигателя? 6. Какие формулы использованы для вычисления величин, представленных в табл.1? 7. Какие методы регулирования частоты вращения двигателя параллельного возбуждения Вы знаете? 8. Как изменится частота вращения якоря при одной и той же нагрузке: а) если увеличить сопротивление в цепи якоря; б) если уменьшить ток обмотки возбуждения; в) если уменьшить напряжение на обмотке якоря? 9. Как изменится ток якоря при одном и том же моменте: а) если увеличить сопротивление в цепи якоря; б) если уменьшить ток обмотки возбуждения; в) если уменьшить напряжение на обмотке якоря? 10. Почему наклон естественной механической характеристики к оси абсцисс меньше, чем искусственной при I В < I ВН ? 11. Почему в режиме холостого хода (М =0) частота вращения двигателя при включенном в цепь якоря резисторе rд не равна частоте вращения при rд = 0? 12. Почему ток якоря не равен нулю в режиме холостого хода? 13. От чего зависит КПД двигателя постоянного тока? 14. От каких величин зависит характер изменения КПД двигателя в соответствии с полученным графиком η ( P2 ) ? 15. Вы получили опытным путем механическую характеристику 1 (рис.7). Какие переключения необходимо сделать в схеме (см. рис.1), чтобы получить характеристику 2? 16. Двигатель работает в режиме, соответствующем точке а характеристики 1 (рис.8). Какие действия необходимо выполнить, чтобы двигатель работал в режиме, соответствующем точке б характеристики 2? 17. Двигатель работает в режиме, соответствующем точке а характеристики 1 (рис.9). Какие действия необходимо выполнить, чтобы двигатель работал в режиме, соответствующем точке б характеристики 2? n n 1 а 0 б M 2 2 0 Рис. 7 1 M Рис. 8 14 n б а 0 2 1 M Рис. 9 ОГЛАВЛЕНИЕ Введение ……………………………………………………………………………………. 1. Описание лабораторной установки ………………………………………………... 2. Порядок выполнения работы ………………………………………………………. 3. Теоретические сведения …………………………………………………………….. 4. Отчет по работе ……………………………………………………………………. Контрольные вопросы …………………………………………………………………. 2 2 3 5 12 13