НЕЛИНЕЙНАЯ ДИНАМИКА МНОГОРЕЖИМНЫХ ФОРМАЦИЙ 1
advertisement

1946
УДК 519.7
НЕЛИНЕЙНАЯ ДИНАМИКА
МНОГОРЕЖИМНЫХ ФОРМАЦИЙ
С.Н. Васильев
Институт проблем управления им. В.А. Трапезникова РАН
Россия, 117997, Москва, ул. Профсоюзная, 65
E-mail: snv@ipu.ru
Р.И. Козлов
Институт динамики систем и теории управления СО РАН
Россия, 664033, Иркутск, ул. Лермонтова, 134
E-mail: kozlov@icc.ru
С.А. Ульянов
Институт динамики систем и теории управления СО РАН
Россия, 664033, Иркутск, ул. Лермонтова, 134
E-mail: sau@icc.ru
Ключевые слова: многорежимные формации, нелинейная динамика, устойчивость миссии, вектор-функции Ляпунова
Аннотация: Предложена общая математическая модель движения формаций с децентрализованным многорежимным управлением. Для типовых режимов движения
даны определения желаемой динамики в виде свойств диссипативности и практической устойчивости, которые в отличие от известных постановок задач устойчивости
формаций учитывают неполноту измерения параметров собственного и взаимного
движения объектов, погрешности, ограниченность управления, неопределенности
объектов и внешние возмущения. Для многорежимного движения введено новое понятие устойчивости миссии. Приводятся основанные на вектор-функциях Ляпунова
достаточные условия названных динамических свойств и краткие сведения о технологии численного анализа и синтеза управления нелинейных систем в условиях
неопределенности с помощью сублинейных ВФЛ. Показано ее применение к расчету децентрализованного управления группировкой движущихся объектов в задаче
сканирования плоской области.
1.
Введение
Интерес к управлению формациями, т.е. группировками движущихся объектов
(агентов), вызван широким спектром приложений, в т.ч. обследование либо мониторинг различных физических сред (часто труднодоступных или опасных для человека), транспортировка крупногабаритных грузов, поисковые и спасательные миссии.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1947
Выделяют три основных подхода к управлению формациями [1]: на основе принципа «лидер-ведомый», с использованием виртуальных структур и поведенческий
подход. Наиболее естественным является первый подход. При этом мы будем предполагать, что на множестве агентов задан набор упорядоченных пар (дуг «лидерведомый») различных агентов (т.е. без кратных и симметричных дуг и петель), причем так, что ни один агент не может быть ведомым в паре с агентом, для которого
он опосредованно (по транзитивности) являлся лидером (т.е. граф не содержит замкнутых маршрутов), и один из агентов, не будучи ведомым ни в одной паре, есть
лидер всей формации и задает ее движение в целом, а остальные объекты, управляя параметрами своего движения, стремятся поддерживать желаемое положение
относительно своих лидеров.
Важной проблемой управления формациями является обеспечение их устойчивости при навигационных и других ошибках измерительных устройств, ограничений на
ресурсы управления и разного рода возмущений. В большинстве известных постановок задач устойчивости формаций (см., например, [2–6]) предполагается линейность
модели и/или измеримость для каждого агента всех переменных его собственного
движения и, что особенно существенно, переменных движения относительно лидеров. Поэтому актуальными являются задачи устойчивости формаций, по возможности, полно учитывающие реальные условия функционирования.
При выполнении сложной миссии, например, с маневрами, предполагающими перестроение, выбытие некоторых агентов или присоединение новых, структура формации может изменяться и система управления необходимо становится многорежимной. При смене режима могут изменяться и регулятор, и характеристики объекта
управления. Зачастую желаемая динамика формации в различных режимах может
определяться свойствами, так или иначе, имеющими смысл устойчивости (асимптотической и практической устойчивости, диссипативности). Разнообразие требуемых
свойств продиктовано как изменением требований к динамике формации в процессе
движения, так и сутью задач, которые решает группа на отдельно взятых участках, будь то образование формации, следование по предписанной или формируемой
в процессе движения траектории или восстановление формации после программных
маневров.
Доминирующим аппаратом исследования устойчивости систем с переключениями режимов является метод функций Ляпунова, но пока чаще всего режимов с
линейным описанием (см., например, обзор [7]). Известные результаты для нелинейных моделей (см., например, [8]) требуют развития до уровня конструктивных процедур построения функций типа Ляпунова и количественных оценок (КО) областей
наличия требуемых свойств, особенно важных для согласования режимов.
Настоящая работа направлена на развитие строгих конструктивных способов
исследования устойчивости и управления движением многорежимных формаций в
условиях неполноты информации, ограничений на ресурсы управления, погрешностей измерителей, исполнительных органов и других элементов системы управления
агентов, возможных структурных изменений, а также разного рода возмущений. Даются общая математическая модель формации с многорежимным децентрализованным управлением и определения ее желаемого поведения в отдельных типичных режимах, а также ее движения в целом. Приводятся основанные на вектор-функциях
Ляпунова (ВФЛ) [9–11] достаточные условия исследуемых свойств и сведения об их
применении.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1948
2.
Формализация желаемой динамики формаций
Пусть движение формации описывается следующей системой
(1)
ẋσ0 = f0σ (t, xσ0 , uσ0 (t, xσ0 ), pσ0 (t, xσ0 )) ≡ F0σ (t, xσ0 , uσ0 , pσ0 ), uσ0 ∈ U0σ , pσ0 ∈ P0σ ,
σ
σ
σ
ẋσi = fiσ (t, xσi , sσJi , uσi , pσi ) ≡ Fiσ (t, xσi , x∗σ
i , pi ), i = 1, N , t ∈ T ⊆ [0, ∞).
Здесь индекс 0 соответствует лидеру формации, N σ — количество агентов в режиσ
ме σ, не считая лидера формации, xσi ∈ Xiσ ⊆ Rni — вектор состояния
QN σ σ i-го объекта,
σ
σ
σ
σ
x ≡ col xi — полный вектор состояния системы, x ∈ X = i=0 Xi ; σ ∈ Σ — инi
Q σ
σ
∗σ
≡
Xj , Jiσ —
декс текущего режима функционирования; x∗σ
i ≡ colσ xj ∈ Xi
j∈Ji
множество номеров лидеров для i-го агента
(J0σ
= ∅); для i =
1, N σ
j∈Jiσ
sσJi
≡ colσ sσj ,
j∈Ji
sσi = sσi (xσi ) — переменные i-го агента, характеризующие его собственное движение
(координаты, углы, скорости и др.); uσi = uσi (t, zσi , riσ , pσui ) — управление i-го агента;
zσi = zσi (xσi ) — вектор измерения состояния i-го агента; riσ (sσi , sσJi ) — совокупность измеряемых переменных, определяющих взаимное относительное движение i-го агента
σ
— погрешности, нестабильность,
как ведомого и его лидеров; pσui = pσui (t, zσi , riσ ) ∈ Pui
неопределенности измерителей, исполнительных органов и других элементов систеσ
мы управления i-го агента; pσi = pσi (t, xσi , x∗σ
i ) ∈ Pi — неопределенности самого i-го
агента, внешние и иные возмущения; U0σ — множество управлений лидера формации, задающее его допустимые маневры, являющиеся одной из причин нарушения
желаемой конфигурации, P0σ — множество возмущений лидера формации.
При сделанных предположениях о структуре формаций после подходящей нумерации объектов будет Jiσ ⊆ {0, i − 1} (в частности, когда Jiσ одноэлементны, граф
отношения «лидер-ведомый» имеет структуру дерева).
Как основные можно выделить следующие режимы: «сбор» группы; некоторый
стационарный рабочий режим; перестроение, восстановление или образование новой
конфигурации. В каждом режиме желаемое поведение группы формализуется как
свойство диссипативности [12], либо практической устойчивости со своими, вообще
разными, показателями этих свойств. Например, от стабилизирующего управления
в зависимости от режима может требоваться: 1) минимизировать ошибки стабилизации группы (рабочий режим); 2) при заданных требованиях к точности максимизировать область притяжения (образование формации); 3) за данный промежуток
времени уменьшить конечные отклонения от желаемой конфигурации (промах) до
требуемых значений (восстановление формации) и др. При смене режимов должна обеспечиваться их согласованность, т.е. возможность качественного выполнения
следующего режима.
d0 σ
Для каждого режима σ введем оценочные функции ρσ0 (t0 , x0σ ) ∈ R̄+
, ρσc (t, xσ ) ∈
d
σ
f
dc σ
R̄+
и ρσf (t, xσ ) ∈ R̄+ как «меры» отклонения группы от желаемой конфигурации в
начальный, текущий и финальные моменты времени соответственно. Смысл и вид
этихσ функций может быть различным в разных режимах. Полагая P σ = U0σ × P0σ ×
Q
N
σ
σ
i=1 (Pi ×Pui ), определим желаемое поведение формации на рабочих режимах в виде
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1949
динамического свойства (ρσ0 , ρσc , ρσf )-диссипативности (Dσ ):
df σ
(2)
d0 σ
dc σ
Dσ = ∃δ σ ∈ R+
∃β σ ∈ R+ ∃εσ ∈ R+
∃τ σ > 0 ∀t0 ∈ T 0σ
∀x0σ ∈ X 0σ : ρσ0 (t0 , x0σ ) 6 δ σ ∀pσ ∈ P σ ∀xσ (·, t0 , x0σ , pσ )
∀t ∈ Tt0 ρσc (t, xσ (t)) 6 εσ & ∀tf > t0 + τ σ ρσf (tf , xσ (tf )) 6 β σ ,
т.e. существует строго положительный вектор δ σ , такой что, если начальные отклонения формации по функции ρσ0 не превосходят δ σ , то во все время движения текущие
фазовые состояния по функции ρσc не превосходят координат вектора εσ и по функции
ρσf стремятся в «трубку точности», определяемую вектором β σ , и далее не выходят
из нее.
k
k
≡ {y ∈ Rk : y > 0}, R+ ≡ {y ∈ Rk : y > 0}, где Rk упорядочено
Здесь R+
покоординатным отношением частичного порядка; T = [0, +∞), T 0σ – множество начальных моментов времени, Tt0 ≡ [t0 , +∞). В приложениях, особенно при проверке
согласованности режимов в многорежимной миссии, важно удовлетворять оценки
вида δ σ δ̄ σ , β σ β̄ σ , εσ ε̄σ , τ σ 6 τ̄ σ , где — смешанное покоординатное отk
ношение частичного порядка в R+
(строгое по одним координатам и нестрогое по
df σ
d0 σ
dc σ
σ
σ
другим). Векторы β̄ ∈ R̄+ , ε̄ ∈ R̄+
, δ̄ σ ∈ R̄+
(некоторые компоненты их могут быть и бесконечными) задают количественные требования к оценкам точности,
текущие фазовые ограничения и требования к размерам области диссипативности
Dσ (t0 ) (множества начальных состояний x0 ∈ X 0σ для данного t0 ∈ T 0σ , при которых выполняется вторая часть заключительного утверждения свойства Dσ ). Число
τ̄ σ определяет допустимое время переходных процессов с ρσ0 (t0 , x0σ ) 6 δ σ .
Данное определение свойства Dσ охватывает и вариант понятия диссипативности, в котором заключительное утверждение заменено на
h
i
σ
σ
σ
σ
σ
σ
(3)
∀t ∈ Tt0 ρc (t, x (t, ...)) 6 ε & lim ρf (t, x (t, ...)) 6 β
t→∞
(с отбрасыванием квантора ∃τ σ ), причем предельное соотношение в (3) может быть
равномерным по t0 , x0σ . При β σ < β̄ σ оба варианта эквивалентны.
Свойство практической устойчивости, требуемое для начальных и переходных режимов («сбор», перестроение, восстановление формации или реконфигурация), выполняющихся на конечном отрезке времени T σ = [tσ0 , tσf ], определяется как
df σ
(4)
d0 σ
dc σ
PS σ = ∃δ σ ∈ R+
: δ σ δ̄ σ ∃β σ ∈ R+ : β σ β̄ σ ∃εσ ∈ R+
: εσ ε̄σ
∀tσ0 ∈ T 0σ ∀x0σ ∈ X 0σ : ρσ0 (tσ0 , x0σ ) 6 δ σ ∀pσ ∈ P σ ∀xσ (·, tσ0 , x0σ , pσ )
∀t ∈ T σ ρσc (t, xσ (t, ...)) 6 εσ & ρσf (tσf , xσ (tσf , ...)) 6 β σ ,
т.е. равномерно относительно начального момента времени tσ0 , если при t = tσ0 отклонения формации по функции ρσ0 ограничены сверху вектором δ σ δ̄ σ , то в конечный
момент времени tσf они по функции ρσf ограничены вектором β σ β̄ σ и во все время
движения T σ текущие фазовые состояния по функции ρσc не превосходят вектора
εσ ε̄σ .
Определим теперь свойство, формализующее желаемое поведение формации при
выполнении всей многорежимной миссии. Пусть в момент переключения режима
векторы состояния xς , xσ в новом и старом режимах ς, σ связаны соотношением
(5)
xς = wςσ (xσ ) ∈ X 0ς
∀xσ ∈ X σ .
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1950
Будем называть миссией M конечную или бесконечную последовательность
{σj } (j = 0, J, J 6 ∞) режимов σj ∈ Σ, для каждого из которых движение описываσ
σ
ется системой (1) и момент окончания tf j является начальным t0 j+1 для следующего.
σ
При этом считается t0 j+1 ∈ T 0σ+1 . Если желаемым для режима σj является свойσ
σ
ство PS σj , его продолжительность ϑσj полагается заданной (ϑσj = tf j − t0 j ); если же
таким свойством является диссипативность Dσj , то продолжительность ϑσj режима
может быть сколь угодно большой (в том числе бесконечной, когда j = J < ∞),
и во всяком случае предполагается достаточной для того, чтобы система достигала
требуемой точности β σj из заключительного утверждения (2), т.е. ϑσj > τ σj .
Обозначим Pσ то из свойств Dσ или PS σ , которое требуется в режиме σ. Естественно считать миссию M успешной (устойчивой), если для каждого ее режима
σj имеет место нужное свойство Pσj и переключения таковы, что при переходе на
следующий (j + 1)-й режим система оказывается для него в начальном состоянии,
допустимом требованиями свойства Pσj+1 . В соответствии с (5) и формулами свойств
Dσ , PS σ для этого достаточно в заключительные утверждения из (2),(4) добавить
σ
σ
σ
& (ρ0 j+1 (t0 j+1 , wσj+1 σj (xσj (tf j , ...))) 6 δ σj+1 ).
j+1
Получаемые после такого добавления формулы будем обозначать Pσj .
Свойство устойчивости миссии определяется следующим образом:
( 1
J
2
Pσ0 & Pσ1 & . . . & PσJ−1 & PσJ при J < ∞;
MS =
j+1
∞
&j=0 Pσj при J = ∞.
3.
Исследование динамики формаций методом
ВФЛ
В качестве инструмента проверки наличия желаемых свойств и вычисления КО
динамических показателей, характеризующих эти свойства, далее дается развитие
метода ВФЛ [9–13] в направлении учета структурных связей агентов, что позволяет
редуцировать задачу построения ВФЛ для мультиагентной формации к подзадачам
построения локальных ВФЛ для отдельных агентов.
Введем некоторые обозначения, опуская для краткости индекс режима σ. Пусть
g(t, y) — квазимонотонно неубывающая [9, 10, 14], полунепрерывная сверху по y, изk
меримая по t и интегрально ограниченная в компактах функция Tc ×R+ → Rk такая,
ki
что g(t, y) = col gi (t, yi , yi∗ ), где Tc = T или Tc = [0, tf − t0 ], y = col yi , yi ∈ R+ , k =
i=0,N
i=0,N
P
ki , yi∗ ≡ col yj ; g(t, 0) > 0. Согласно результатам из [10, 14] система ẏ = g(t, y) при
i
j∈Ji
любых начальных данных из области определения имеет нелокально продолжимые
вправо абсолютно непрерывные обобщенные решения в смысле В.Матросова (ОIIрешения), среди которых существует верхнее решение, мажорирующее все решения
с одинаковыми начальными данными. Для непрерывной по y функции g эти решения
переходят в решения Каратеодори.
n
o
k
0
τ
τ
τ
Обозначим: g (y) ≡ lim
sup g(t, y ), Ω ≡ y ∈ R+ : g (y) = 0 , τ ∈ T = [0, ∞);
y0 →y t>τ
n
o
k
g ∞ (y) ≡ lim g τ (y), Ω∞ ≡ y ∈ R+ : g ∞ (y) = 0 ; Eiτ (z) ≡ {yi > zi : giτ (yi , z∗i ) < 0},
τ →∞
Ei∞ (z) ≡ {yi > zi : gi∞ (yi , z∗i ) < 0}; Ki (z) ≡ {yi > zi : ∀λ ∈ (0, 1] ϕi (λ, yi , zi ) ∈ Ei0 (z)}.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1951
k
Здесь z = col zi ∈ R+ , ϕi (λ, yi , zi ) — непрерывная, неубывающая по λ ∈ [0, 1]
i=0,N
функция такая, что ϕi (0, yi , zi ) = zi , ϕi (1, yi , zi ) = yi .
С использованием результатов из [14] получается следующая
Теорема 1 (о (ρ0 , ρc , ρf )-диссипативности). Пусть для всех i = 0, N существуют непрерывные, локально липшицевые по xi , x∗i вектор-функции vi (t, xi , x∗i ) : T ×
ki
Xi × Xi∗ → R+ , удовлетворяющие условиям
0
0
0
1) vi (t0 , x0i , x∗0
i ) 6 ai (ρ0 (t0 , x )) ∀t0 ∈ T0 , ∀x ∈ X ;
2) ρc (t, x) 6 bc (v(t, x)), ρf (t, x) 6 bf (v(t, x)) ∀t ∈ T, ∀x ∈ X, где ai , bc , bf неубывающие неотрицательные функции, lim ai (r) = 0; v(t, x) ≡ col vi (t, xi , x∗i );
3)
vi0 (t, x, p)
≡ lim
∆t→0+
r→0
1
(v (t+∆t, xi +∆tFi (t, x, pi ), x∗i +∆t col
∆t i
j∈J
i=0,N
Fj (t, x, pj ))−vi (t, xi , x∗i )) 6
i
gi (t − t0 , v(t, x))
∀t0 ∈ T0 , ∀t, x, p ∈ Tt0 × X × P ;
4) существует точка z ∈ Ω0 такая, что ∀i = 0, N множества Ki (z) не пусты,
для чего в случае, когда функции gi0 (yi , z∗i ) субдифференцируемы по yi в точке zi (в
частности, выпуклы), достаточно, чтобы позитивные матрицы Gi (z) с элемента0
0
ми giµν = (gi0µ ) (zi , eν ), µ, ν = 1, ki , где (gi0µ ) (zi , eνi ) – производная µ-той компоненты
gi0µ в точке zi по направлению координатного орта eνi в Rki , были гурвицевыми.
Тогда система (1) (замкнутая управлениями агентов) обладает свойством диссипативности D.
В отличие от теоремы из [12], в теореме 1, учитывающей структуру связей, локальные ВФЛ vi (t, xi , x∗i ) могут строиться последовательно и проверка основного
условия 4), обеспечивающего диссипативность системы сравнения (СС) ẏ = g(t, y),
после отыскания точки z, как минимального решения системы g 0 (y) = 0, может осуществляться независимо для каждой ki -мерной подсистемы ẏi = gi (t, yi , z∗i ). Это существенно сокращает вычислительную сложность построения ВФЛ и КО и, главное,
упрощает работу исследователя.
Теорема 2 (об оценках в свойстве диссипативности). В условиях теоремы 1
в качестве оценки β «предельных состояний» по функции ρf (оценки предельной
точности в заключительном утверждении вида (3)) можно принять вектор β =
bf (η), где η ∈ Ω∞ , η = col ηi 6 z, ηi = inf Ki∞ (η), Ki∞ (η) — связные множества
i=0,N
Ei∞ (η),
содержащие Ki (z) (такая точка η при условии 4) всегда существует).
В качестве внутренней оценки области диссипативности D(t0 ) по функции ρ0
d0
можно взять «параллелепипед» Πδ (t0 ) ≡ {x0 ∈ X 0 : ρ0 (t0 , x0 ) 6 δ}, где δ ∈ R+
– любой вектор такой, что при некотором y0 > a(δ) ≡ col ai (δ) для верхнего
в
i=0,N
решения y ∗ (t) уравнения
ẏ = g 0 (y) с y ∗ (0) = y0 в какой-то момент времени t∗ > 0
Q
N
будет y ∗ (t∗ ) ∈ K(z) ≡ i=0 Ki (z) (в частности, y0 ∈ K(z)).
Для всех процессов с ρ0 (t0 , x0 ) 6 δ на всем промежутке Tt0 оценкой по ρc служит вектор ε = bc ( max∗ y ∗ (t)), а более точно – функция ε∗ (t − t0 ) = bc (ŷ(t)), где
t∈[0,t ]
ŷ(t) – верхнее решение СС ẏ = g(t, y) c ŷ(0) = y0 ; время достижения заданной
точности β ∗ > β (времени τ ∗ , для которого ρf (t, x(t, ...)) 6 β ∗ при t > t0 + τ ∗ ) не
превышает значения τ ∗ > t∗ такого, что bf (ŷ(τ ∗ )) 6 β ∗ .
Возможность эффективного построения КО показателей, определяющих диссипативность, позволяет применить теорему и для вариантов свойства D с заданными
требованиями на оценки точности, области диссипативности, времени переходных
процессов и на текущие фазовые ограничения.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1952
Теорема 3 (о (ρ0 , ρc , ρf )-практической устойчивости). Пусть существуют векторфункции vi (t, xi , x∗i ), удовлетворяющие условиям 1) - 3) теоремы 1 (при Tc = [0, tf −
t0 ]), а также условию
4) bc (max ŷ(t)) = ε ε̄, bf (ŷ(tf −t0 )) = β β̄, где ŷ(t) – верхнее решение системы
t∈Tc
d0
.
ẏ = g(t, y) с начальным условием ŷ(0) = a(δ), δ δ̄ – некоторый вектор из R+
Тогда система (1) обладает свойством PS.
Теорема 4 (об устойчивости миссии). Пусть множество Σ различных режимов, входящих в миссию M, конечно, для каждого режима σ ∈ Σ в зависимости
от требуемого свойства (Dσ или PS σ ) выполнены условия теорем 1 или 3 с ВФЛ
v σ (t, xσ ) и оценками допустимых начальных состояний δ σ , а также следующие:
5) ρσ0 (tσ0 , x0σ ) 6 bσ0 (v σ (tσ0 , x0σ )) ∀tσ0 ∈ T0σ , ∀x0σ ∈ X 0σ ;
6) v ς (tς0 , wςσ (xσ )) 6 dςσ (v σ (tς0 , xσ )) ∀tς0 ∈ T0ς , ∀xσ ∈ X σ , если режим σ может
в миссии M переключиться на ς ∈ Σ; bσ0 , dςσ — неубывающие функции (wςσ —
функция (5) изменения состояния при переключении);
7) bς0 (dςσ (vfσ )) 6 δ ς , где vfσ = ŷ σ (τ ∗σ ), когда свойством системы (1) в режиме σ
является Dσ , и vfσ = ŷ σ (tσf − tσ0 ), когда это – свойство PS σ ; ŷ σ (t) – верхнее решение
СС, определенное в последних условиях теорем 2, 3 (применительно к режиму σ).
Тогда миссия M устойчива (обладает свойством MS).
Теоремы расширяют теоретическое обоснование технологии строгого анализа и
синтеза нелинейных робастных систем стабилизации с помощью сублинейных ВФЛ
[9,15], реализованную в нескольких версиях пакетов программ, последняя из которых
– пакет «ВФЛ-РЕДУКТОР» [16]. Технология предполагает представление модели
системы в одной из типовых форм, например, достаточно широкий класс нелинейных
многосвязных систем с неопределенностями, динамика которых (вместе с наблюдателями состояния, возмущениями и динамикой элементов системы) описывается (при
непрерывном управлении) дифференциальными уравнениями вида:
(6)
ẋi = (Ai + ∆Ai (...))xi + (Bi + ∆Bi (...))ui + Hi Φi (t, xi , x̄i , ui , pi ),
(7)
ui = ϕi (σi , ...) ∈ Rmi , σi = Ci ψi (ηi , ...) ∈ Rmi , ηi = Di xi ∈ Rli , xi ∈ Rni .
Здесь (...) ≡ (t, xi , pi ), ∆Ai (·), ∆Bi (·), Φi (·) — функции, задающие неопределенности и нелинейности объекта, внешние и другие возмущения, а также связи между
подсистемами, для которых предполагаются заданными лишь ограничения: ∀pi ∈ Pi
|∆Ai (·)| 6 A0i , |∆Bi (·)| 6 Bi0 , |Φi (·)| 6 Φ0i + Qi (|θi |) ∈ Rpi , θi = Θi xi + Θ̄i x̄i ∈ Rqi ,
Qi — неубывающая, полунепрерывная сверху вектор-функция, Qi (0) = 0 (неравенства между матрицами (векторами), модули понимаются как поэлементные); Ai , Bi ,
Hi , Ci , Di , A0i , Bi0 , Θi , Θ̄i , Φ0i — постоянные матрицы и векторы соответствующих
размерностей; i = 1, N .
Функции ϕi (σi , ...), ψi (ηi , ...) задают характеристики исполнительных органов и
измерителей с учетом их погрешностей, неопределенности, нестабильности, нелинейностей, ограниченности сигналов (и других факторов) и считаются функциями
класса SN (ξ0 , ξ, Kξ , Kξ0 ) [9,15], содержащего многие типовые нелинейности, нелинейности стандартного или расширенного секторов теории абсолютной устойчивости и
определяемого соотношениями вида
(8)
min Kξ (ξ − ξ0 ) − Kξ0 |ξ|; Kξ ξ 6 ϕ(ξ, ...) 6 max Kξ (ξ + ξ0 ) + Kξ0 |ξ|; −Kξ ξ .
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1953
Параметры класса Kξ , Kξ0 задают соответственно номинальные значения и допустимые неопределенности, нестабильность элементов матрицы коэффициентов усиления, ξ0 определяет допустимые погрешности, зоны нечувствительности, квантование
по уровню, вектор ξ характеризует ограниченность (насыщение) управления или рабочего диапазона измерителей.
Основными являются задачи исследования наиболее важных с прикладной точки
зрения динамических свойств диссипативности, асимптотической, экспоненциальной
и практической устойчивости, анализ которых включает (как главную цель) вычисление всех основных количественных оценок (КО), характеризующих эти свойства:
– точности долговременной стабилизации (в свойстве D) или точности попадания
в целевое состояние (в свойстве PS) по «мере» ρf (оценки вектора β);
– возможных фазовых состояний или области достижимости по «мере» ρc для
процессов из заданного начального множества Πδ (оценки вектора ε или функции
ε(t));
– времени регулирования до заданной точности β для процессов из множества
Πδ ;
– области диссипативности D, притяжения A или других допустимых (с точки
зрения последующего выполнения какого-то свойства или оценки, например, оценки
«промаха») областей начальных состояний в виде наибольших «параллелепипедов»
Πδ с заданными направлениями векторов δ;
– показателей экспоненциального затухания процессов.
«Меры» начальных, текущих и финальных состояний удобно задавать в виде
(9)
ρ0 (x0 ) = |R0 x0 |, ρc (x) = |Rc x|, ρf (x) = |Rf x|,
где R0 , Rc , Rf – матрицы соответствующих размерностей, R0 имеет полный ранг.
Используемые для исследования ВФЛ строятся как сублинейные функции
(10)
vi (xi ) = |Si (x)|∨ ≡ col ||Sij x||j , 1 6 ki 6 ni , i = 1, N ,
j=1,ki
где Si – в общем случае комплексная
(ni ×ni )-матрица ранга ni 6 ni , Sij – ее горизонP
тальные (nij × ni )-блоки,
nij = ni , j = 1, ki , || · ||j – некоторая норма в nij -мерном
j
пространстве; в частности, Si – неособенная (ni × ni )-матрица, преобразующая матрицу Li = Ai + Bi Kiσi Ci Kiηi Di «номинальной» линеаризованной системы (6)-(7) к
почти диагональному или другому каноническому виду, ∨ — операция агрегирования (по типу нормы) «близких» по модулю строк [9, 15].
Система сравнения, отвечающая ВФЛ (10), находится в явной форме и имеет
вид
ẏi = Pi yi + Gi qi (yi , ȳi ) + Ri ≡ gi (yi , ȳi ) ∈ Rki , i = 1, N ,
где Pi — позитивная матрица, Gi , Ri — неотрицательные матрица и вектор, qi (yi , ȳi ))
— неубывающая, субдифференцируемая по yi функция, qi (0, 0) = 0. Явные (линейные) выражения выводятся также для функций ai , bc , bf , связывающих значения
«мер» (9) со значениями ВФЛ. В результате получаются эффективные процедуры
анализа нужных свойств СС и построения КО.
Важным качеством предлагаемой технологии является возможность синтеза систем с требуемой динамикой. Задачи синтеза формулируются как задачи выбора
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1954
параметров в алгоритмах управления (в том числе обратной связи в динамических
регуляторах и наблюдателях), оптимизирующих оценку основного для рассматриваемого режима показателя при заданных ограничениях на некоторые из остальных
оценок. По самой постановке полученные системы оказываются робастными.
Так, для рабочих режимов в качестве основной, оптимизируемой оценки естественно принимать оценку точности стабилизации. В свою очередь, для режимов
образования или восстановления формации имеет смысл задача синтеза параметров
управления по критерию минимума времени регулирования до заданной точности
из заданного множества начальных состояний или задача нахождения параметров,
обеспечивающих максимальный размер области допустимых начальных отклонений
при заданных требованиях к точности конечного состояния.
Главное отличие и достоинство разработанной технологии это, с одной стороны
строгость результатов, гарантированный характер получаемых суждений и оценок, а
с другой - конструктивность, возможность довести исследование «до числа». Именно
в отношении точности числовых результатов аппарат ВФЛ оказывается предпочтительным по сравнению с другими строгими качественными методами. Важно, что
рассматриваемые задачи формулируются непосредственно в терминах инженерных
требований к системе (прямых показателей динамического качества), результаты
также получаются в этой форме.
4.
Приложение к задаче сканирования плоской
области
Покажем применение описанной технологии для анализа и синтеза системы
управления группировкой автономных роботов в задаче обследования или съемки
плоской области путем ее многократного сканирования встречными курсами («тудаобратно») при требовании обеспечения с заданной точностью конфигурации группы
во время рабочих ходов. В рассматриваемой задаче выделяются следующие участки движения группы: рабочие участки сканирования, участки перестроения и восстановления формации. В предположении, что навигационной системой, приемлемой для отслеживания расчетного движения, обладает только лидер группировки, а
остальные ее члены могут измерять лишь взаимное положение (дистанцию и угол пеленга) относительно лидера или друг друга, управление для последних на участках
восстановления конфигурации и сканирования будем строить по принципу «лидерведомый», а на участках перестроения — как программное.
В качестве математической модели группы на программных участках примем
(11)
ẋi = vi cos ϕi ,
ẏi = vi sin ϕi ,
mi v̇i = ui + ri + pi , Ji ω̇i =
uϕi
ϕ̇i = ωi ,
+
riϕ
+
pϕi ;
i = 0, N ,
i = 1, N ,
где xi , yi — координаты центра масс oi i-го объекта в некоторой неподвижной декартовой системе координат (индекс i = 0 соответствует лидеру группы), vi – скорость
(абсолютная) центра масс i-го объекта, ϕi — угол между направлением вектора скорости и осью x (курс i-го объекта), ωi — угловая скорость; mi — масса, Ji — момент инерции i-го объекта; ui , uϕi — линейное и угловое управления (тяга и момент);
ri = ri (vi , . . .), riϕ = riϕ (ωi , vi , . . .) — силы сопротивления движению; pi (. . .), pϕi (. . .) —
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1955
силы и моменты, рассматриваемые как возмущения (многоточием обозначена совокупность переменных, включая t, от которых могут зависеть названные величины).
Для описания динамики группы на участках, где управление строится по принципу «лидер-ведомый», будем использовать модель, получаемую из (11) добавлением
к ней кинематических соотношений
ṡi = vji cos(ϕji − ϕi + δi ) − vi cos δi ,
(12)
si δ̇i = si ωi + vi sin δi − vji sin(ϕji − ϕi + δi ),
i = 1, N ,
определяющих движение ведомых относительно своих лидеров. Здесь δi — угол между вектором скорости и направлением на лидера (пеленг), si — расстояние между
центрами масс объекта и его лидера (дистанция), ji — номер лидера для i-го объекта
(для каждого ведомого возможен только один лидер). Здесь и далее индекс режима
движения группы не указывается, подразумевая, что с точностью до перестановки
индексов объектов модель формации в каждом из режимов одинакова.
Безотносительно изучаемого режима будем считать, что каждый ведомый объект может измерять лишь некоторые параметры собственного движения vi , ϕi , ωi , а
также параметры относительного движения своих лидеров si , δi . Таким образом,
управление каждого объекта группировки является полностью автономным и не
предполагает какого либо обмена информацией между объектами (например, для
скрытности).
Режимы стабилизации. В режимах сканирования (рабочих) и предшествующих
им режимах образования («сбора») или восстановления группы, предполагающих
стабилизацию формации, управление берется в виде
ui = uis + uic ,
uϕi = uϕis + uϕic
где uic , uϕic — компенсирующие слагаемые управления, формируемые с целью преодоления сопротивления и парирования возмущений на основе известной части определяющих их зависимостей; uis , uis — составляющие управления, создаваемые именно с
целью стабилизации формации. Предполагается, что, исходя из измерительных возможностей, стабилизирующее управление формируется по принципу обратной связи
как ПД-регулятор с использованием наблюдателей первого порядка для получения
оценок относительных скоростей.
Примем в качестве исходной «невозмущенной» конфигурации группы формацию, движущуюся с постоянной скоростью v ∗ , с заданными дистанциями si = s∗i и
углами пеленга δi = δi∗ . Выбором системы отсчета можно считать, что в невозмущенной формации ϕi = 0 и ωi = 0.
Тогда в качестве «меры» начальных отклонений естественно взять вектор
ρ0 = col((|v00 − v ∗ |, |ϕ00 |, |ω00 |)T ,
col (|si0 − s∗i |, |vi0 − v ∗ |, |ϕi0 |, |ωi0 |, |δi0 − δi∗ |)T ) ∈ R5N +3 .
i=1,N
Оценочной функцией финальных состояний, очевидно, служит вектор
ρf (x) = col (|Msi |, |Mδ i |)T ,
i=1,N
M si
≡ si − s∗i , Mδ i ≡ δi − δi∗ ;
текущие состояния естественно оценивать вектор-функцией
ρc (x) = col (|ϕi − ϕi−1 |, |Msi |, |Mδ i |, |vi − v ∗ |, |ωi |) .
i=1,N
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1956
В итоге, для рабочего режима получается задача исследования свойства диссипативности, состоящая в оценке допустимой области начальных состояний по функции
ρ0 , оценке предельной области, т. е. точности стабилизации формации по вектору ρf ,
либо достижимости требуемой точности при заданном уровне допустимых возмущений и неопределенностей, либо синтеза параметров (в частности, коэффициентов
обратной связи), обеспечивающих нужные или наилучшие оценки.
Анализ свойства практической устойчивости, характерного для режима сборавосстановления, состоит в оценке области достижимости по вектору ρc в любой момент времени или области конечных состояний («промаха») по вектору ρf для процессов из начального множества с заданной оценкой по ρ0 , оценке времени регулирования до заданной точности, либо синтезе параметров управления, обеспечивающих,
например, из заданного начального множества достижение за заданный промежуток
времени конечного состояния с наилучшей гарантированной точностью по ρf .
При решении перечисленных задач уравнения движения (11)-(12) приводятся
к виду (6)-(7) путем их линеаризации в окрестности невозмущенного движения c
оцениванием в разложениях в ряд членов выше первого порядка малости.
Программный режим. Управление в режиме перестроения возьмем в виде
ui = uip + uis + uic , uϕi = uϕip + uϕis + uϕic ,
где uip , uϕip — программные составляющие управления, реализующие некоторый заданный маневр (программное движение); uis , uϕis — стабилизирующие слагаемые
управления, призванные отслеживать программные движения; uic , uϕic — компенсирующие составляющие, вводимые с той же целью, что и для рабочего режима.
Программное движение (перестроение) в рассматриваемой задаче сканирования
разобьем на три этапа: гашение скорости с ее расчетного значения v ∗ в рабочем
режиме до скорости во время разворота, основной этап – движение с разворотом
объекта на угол ±π и, наконец, этап восстановления скорости снова до рабочего
значения v ∗ к моменту переключения на режим восстановления конфигурации.
Программное управление для основного этапа выбирается таким образом, чтобы
при выполнении разворота линейная скорость объекта была постоянна, а угловая
скорость изменялась по треугольному закону.
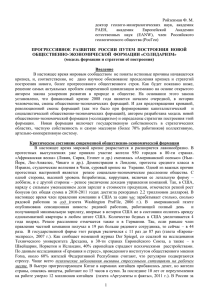
600
îáëàñòü ñêàíèðîâàíèÿ
500
ðàáî÷èå ó÷àñòêè
ó÷àñòêè ïåðåñòðîåíèÿ
400
300
200
100
0
−100
−200
−200
−100
0
100
200
300
400
500
Рис. 1. Траектории движения роботов при сканировании плоской области
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1957
Средствами пакета «ВФЛ-РЕДУКТОР» для рассматриваемой задачи сканирования синтезирована многорежимная система управления группировкой из 3-х малых автономных подводных роботов (масса ' 150 кг, момент инерции ' 130 кг · м2 ),
учитывающая неопределенности масс и моментов инерции роботов, погрешности их
исполнительных устройств и измерителей, ограничения на управления. Результаты
численного моделирования системы представлены на рис. 1. Многочисленные эксперименты показали приемлемое качество синтезированной системы.
5.
Заключение
В заключение отметим, что развиваемая в работе технология исследования многорежимных формаций позволяет в комплексе учитывать многие факторы неопределенности и возмущений, присущие реальным приложениям. Это оказывается особенно востребованным при управлении глубоководными автономными роботами, обладающими сравнительно большой инерционностью и функционирующими в условиях
малоизвестной среды, дефицита средств высокоточной навигации и различного рода
возмущений.
Вместе с тем, в представленном исследовании предполагалось, что миссия имеет
предопределенную последовательность переключения режимов, поэтому естественным выглядит расширение понятие миссии для охвата случаев, когда порядок выполняемых режимов может непредвиденным образом изменяться (например, с целью
обхода препятствий) и когда переходы между режимами являются недетерминированными. В последнем случае становятся актуальными проблемы разработки верхнего (командного) уровня управления, ответственного за интеллектуальное планирование многорежимной миссии, и совмещения верхнего и нижнего уровней управления.
Наиболее подходящим инструментом анализа многоуровневых систем является метод редукции [11,12], позволяющий в развитие метода ВФЛ подойти к исследованию
различных уровней с единых позиций. Планируется дальнейшее развитие предложенной технологии исследования многорежимных формаций с учетом такой многоуровневости управления.
Работа выполнена при частичной поддержке РФФИ в рамках проектов 14-0700740мол_а и 13-08-00948, а также Программы № 17 Президиума РАН.
Список литературы
1.
2.
3.
4.
5.
6.
Chen Y.Q., Wang Z.M. Formation control: a review and a new consideration // Proceedings of
the IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, Canada,
2005. Edmonton: IEEE Press, 2005. P. 3181-3186.
Tanner H.G., Pappas G.J., Kumar V. Leader-to-formation stability // IEEE Transactions on
Robotics and Automation. 2004. Vol. 20. No. 3. P. 443-455.
Liu S.C., Tan D.A., Liu G.J. Robust leader-follower formation control of mobile robots, based on
a second order kinematics model // Acta Automatica Sinica. 2007. Vol. 33, No. 9. P. 947-955.
Dunbar W.B., Caveney D.S. Distributed Receding Horizon Control of Vehicle Platoons: Stability
and String Stability // IEEE Transactions on Automatic Control. 2012. Vol. 57, No 3. P. 620–633.
Belabbas M.A. On Global Stability of Planar Formations // IEEE Transactions on Automatic
Control. 2013. Vol. 58, No. 8. P. 2148–2153.
Yang A., Naeem W., Irwin G.W., Li K. Stability Analysis and Implementation of a Decentralized
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1958
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
Formation Control Strategy for Unmanned Vehicles // IEEE Transactions on Control Systems
Technology. 2013.
Lin H., Antsaklis P.J. Stability and stabilizability of switched linear systems: a survey of recent
results // IEEE Transactions on Automatic Control. 2009. Vol. 54, No. 2. P. 308-322.
Васильев С.Н., Косов А.А. Анализ динамики гибридных систем с помощью общих функций
Ляпунова и множественных гомоморфизмов // Автоматика и телемеханика. 2011. № 6. C. 2747
Метод векторных функций Ляпунова в теории устойчивости / Под ред.: А.А. Воронов,
В.М. Матросов. М.: Наука, 1987. 312 с.
Матросов В.М. Метод векторных функций Ляпунова: анализ динамических свойств нелинейных систем. М.: Физматлит, 2001. 384 с.
Васильев С.Н. Метод редукции и качественный анализ динамических систем, I-II// Изв.
РАН. Cер. Теория и системы управления. 2006. № 1. С. 21-29; № 2. С. 5-17.
Васильев С.Н., Козлов Р.И., Ульянов С.А. Анализ координатных и других преобразований
моделей динамических систем методом редукции // Тр. Ин-та математики и механики УрО
РАН. Екатеринбург: ИММ УрО РАН, 2009. Т. 15, № 3. С. 38-56.
Kozlov R.I. VLF-method of nonlinear dynamic investigations in designing of systems for
stabililization of spacecrafts // Proceedings of the First International Conference on Nonlinear
Problems in Aviation & Aerospace ICNPAA-96. Daytona, USA, 1997. Daytona Beach: EmbryRiddle Aeronautical University Press, 1997. P. 319-324.
Козлов Р.И. Теория систем сравнения в методе векторных функций Ляпунова. Новосибирск:
Наука, 2001. 137 с.
Матросов В.М., Козлов Р.И., Матросова Н.И. Теория устойчивости многокомпонентных нелинейных систем. М.: Физматлит, 2007. 184 с.
Козлов Р.И., Ульянов С.А., Хмельнов А.Е. Программный модуль для качественного исследования непрерывных динамических систем ВФЛ-РЕДУКТОР-Н. Свидетельство об официальной регистрации программы для ЭВМ № 2007613832 от 07.09.2007.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г