SYNTHESIS OF NEUROEMULATORS FOR TECHNOLOGICAL CONTROL OBJECTS USING ANALYTICAL PLATFORM DEDUCTOR
advertisement

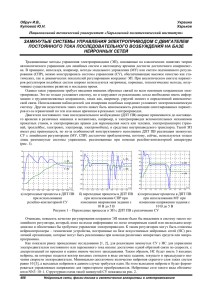
Journal of scientific research publications № 3(7) / 2014 УДК 681.51 SYNTHESIS OF NEUROEMULATORS FOR TECHNOLOGICAL CONTROL OBJECTS USING ANALYTICAL PLATFORM DEDUCTOR Mikhaylov Alexey Sergeevich, postgraduate student, Kostroma State Technological University, amt@kstu.edu.ru Nekhoroshkina Mariya Sergeevna, assistant, Department of information technologies, Kostroma State Technological University, vt@kstu.edu.ru Abstract. In article synthesis of neuroemulator based on experimental data for DC motor with separate excitation is examined. Description of laboratory-scale plant for benchmark data obtaining and solution algorithm are presented. Precision of obtained model is evaluated. The development environment is analytical platform Deductor. Keywords: neuroemulator, multi-layer perceptron, Resilient Propagation algorithm, DC motor, identification. СИНТЕЗ НЕЙРОЭМУЛЯТОРОВ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ УПРАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ АНАЛИТИЧЕСКОЙ ПЛАТФОРМЫ DEDUCTOR Михайлов Алексей Сергеевич, аспирант, Костромской государственный технологический университет, amt@kstu.edu.ru Нехорошкина Мария Сергеевна, ассистент кафедры информационных технологий, Костромской государственный технологический университет, vt@kstu.edu.ru Аннотация. В статье рассматривается синтез нейроэмулятора по эксперимен- тальным данным для двигателя постоянного тока независимого возбуждения. Приводится описание лабораторной установки для получения исходных данных и алгоритм решения задачи. Оценивается точность полученной модели. В качестве среды разработки используется аналитическая платформа Deductor. Ключевые слова: нейроэмулятор, многослойный персептрон, алгоритм Resilient Propagation, двигатель постоянного тока, идентификация. Одним из перспективных направлений в проектировании систем автоматического управления (САУ) является использование в их структуре элементов искусственного интеллекта, в частности искусственных нейронных сетей (ИНС), применяемых в качестве нейрорегуляторов и нейроэмуляторов технологических объектов управления (ТОУ). Анализ некоторых публикаций по данной тематике проводится в работе [1]. 5 Научно-исследовательские публикации № 3(7) / 2014 При синтезе элементов САУ на основе ИНС большинство авторов использует пакет MATLAB и его расширение Neural Network Toolbox. В настоящей статье в отличие от предлагаемых методик рассматривается синтез нейроэмулятора ТОУ с использованием аналитической платформы Deductor. Выбор данного программного обеспечения особенно интересен тем, что оно является свободным для образовательных целей и широко используется при анализе различных экономических процессов, чему посвящен целый ряд изданий, например, [2]. При этом примеры использования Deductor для решения задач технического характера отсутствуют, хотя объективных причин для этого нет. Пусть в качестве ТОУ выбран двигатель постоянного тока независимого возбуждения (ДПТ НВ). В работе [3] описана структура лабораторной установки, позволяющей получить исходные данные для синтеза нейроэмулятора ТОУ «двигатель – рабочая машина». Функциональная схема установки приведена на рис. 1. Рис. 1. Функциональная схема лабораторной установки Механическая часть лабораторной установки представляет собой ДПТ НВ и нагрузочную машину (НМ), соединенные между собой через муфту (М). В качестве НМ используется асинхронный электродвигатель мощностью 50 Вт. Мощность ДПТ НВ – 90 Вт. На общем валу также располагается датчик скорости (ДС). Ток якоря ДПТ НВ контролируется датчиком тока (ДТ). Аналоговые сигналы с ДС и ДТ поступают на вход аналогово-цифрового преобразователя (АЦП). Цифровой сигнал с выхода АЦП поступает в ЭВМ. 6 Journal of scientific research publications № 3(7) / 2014 В качестве исходных данных для синтеза нейроэмулятора рассматриваются результаты серии натурных экспериментов, в ходе которых на обмотку якоря ДПТ НВ подавалось напряжение Uя, а после входа ДПТ НВ в установившийся режим производилось отключение обмотки якоря от сети. Значения Uя были выбраны равными 70, 80, 100, 120, 150 и 180 В. В каждом эксперименте регистрировалась угловая скорость ДПТ НВ ω и ток якоря Iя. Шаг квантования был выбран равным 0,001 с. Таким образом, были получены кривые переходных процессов по скорости и току якоря, а также кривые выбега для каждого значения Uя. Во всех экспериментах напряжение на обмотке возбуждения Uв соответствовало номинальному, а подключение НМ к сети питания не проводилось. НМ создавала на валу ДПТ НВ некоторый минимальный статический момент нагрузки Мн. На рис. 2 приведена графическая интерпретация результатов серии натурных экспериментов для угловой скорости ω и тока якоря Iя после их импорта в Deductor (здесь и далее значения по оси ординат нормализованы, отрицательная полуось времени показана условно). Из рис. 2 видно, что сигнал по каналу Iя сильно зашумлен и нуждается в сглаживании. Сглаживание сигналов по каналам ω и Iя проводилось далее инструментальными средствами Deductor. Рис. 2. Исходные кривые ω*(t) (1) и Iя*(t) (2) Алгоритм разработки нейроэмулятора, также предложенный в работе [3], в виде блок-схемы представлен на рис. 3. 7 Научно-исследовательские публикации № 3(7) / 2014 Рис. 3. Блок-схема алгоритма синтеза нейроэмулятора При синтезе нейроэмулятора кривые переходных процессов по скорости и току якоря, а также кривые выбега для значений Uя равных 70, 100, 120 и 180 В составили обучающее множество; кривые переходных процессов, а также кривая выбега для значения Uя = 80 В – тестовое множество. Наилучшие результаты были получены при использовании ИНС типа «многослойный персептрон» с 9 нейронами во входном слое, 19 нейронами в скрытом слое и 2 нейронами в выходном слое. Функция активации – гиперболический тангенс, алгоритм обучения – RPROP с шагом спуска 0,01 и с шагом подъема 1,2. Для прогнозирования значений ω и Iя на (k+1)-м шаге квантования нейроэмулятором учитываются значения этих величин на k-м, (k-1)м, (k-2)-м и (k-3)-м шагах квантования. Полученный результат в части количества нейронов в скрытом слое соответствует теореме Колмогорова-Арнольда, а точнее ее приложению к теории ИНС (так называемой теореме ХехтНильсена). 8 Journal of scientific research publications № 3(7) / 2014 На рис. 4 приведены результаты идентификации ТОУ на тестовом множестве, а на рис. 5 – графики приведенной погрешности. Рис. 4. Результаты идентификации ТОУ по каналу ω (1 – исходные данные, 2 – данные нейроэмулятора) и по каналу Iя (3 – исходные данные, 4 – данные нейроэмулятора) Рис. 5. Графики приведенной погрешности: по каналу ω (1) и по каналу Iя (2) В результате проделанной работы автор сделал следующие выводы. Проведен синтез нейроэмулятора по экспериментальным данным для ДПТ НВ, продемонстрирована возможность применения аналитической платформы Deductor для решения задач идентификации ТОУ. Наилучший результат получен при использовании в качестве нейроэмулятора ИНС с 9 нейронами во входном слое, 19 нейронами в скрытом слое и 2 нейронами в выходном слое. 9 Научно-исследовательские публикации № 3(7) / 2014 Максимальная приведенная погрешность синтезированного нейроэмулятора на тестовом множестве по каналу ω составляет 10,44%, а по каналу Iя – (-9,49%). Для повышения точности идентификации необходимо на этапе формирования исходных данных для обучения ИНС выбрать шаг квантования таким образом, чтобы не имела места потеря информации. Библиографический указатель: 1. Михайлов А.С. Староверов Б.А. Проблемы и перспективы использования искусственных нейронных сетей для идентификации и диагностики технических объектов / А.С. Михайлов, Б.А. Староверов // Вестник ИГЭУ, 2013. – № 3. – С. 64-68. 2. Паклин Н.Б. Бизнес-аналитика: от данных к знаниям: учебное пособие / Н.Б. Паклин, В.И. Орешков. – 2-е изд. – СПб: Питер, 2013. - 704 с. 3. Михайлов А.С. Алгоритм синтеза нейроидентификатора для системы «электродвигатель – рабочая машина» / А.С. Михайлов // Сб. тез. второй Всер. интернет‐конф. «Грани науки 2013». – Казань: СМУиС, 2013. - С. 974-975 [Электронный ресурс] Режим доступа: http://grani2.kznscience.ru/data/documents/Tezisy_ GraniNauki-2013.pdf. Статья поступила в редакцию 16.01.2014 10