нейросетевой контроллер для управления скоростью
advertisement

4485
УДК 004.8:621.33
НЕЙРОСЕТЕВОЙ КОНТРОЛЛЕР
ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ
АСИНХРОННОГО ДВИГАТЕЛЯ
А.М. Сагдатуллин
Альметьевский государственный нефтяной институт
Россия, 423450, Альметьевск, Ленина ул., 2
E-mail: saturn-s5@mail.ru
Ключевые слова: система управления, искусственный интеллект, нейронные сети, нейроконтроллер, электродвигатель, насос, транспорт нефти.
Аннотация: В последние годы стремительно увеличивается интерес ученых к контроллерам, построенных на принципе нейронных сетей или имеющих их программную реализацию. Однако, большинство работ направлены на управление статическими объектами или объектами, параметры которых изменяются за значительное время в масштабе
технологического процесса. В данной статье предлагается продемонстрировать использование нейронных сетей для управления сложным объектом с динамической нагрузкой.
Усовершенствованная схема прямого управления (последовательного нейроконтроллера) с нейросетевым эмулятором на базе архитектуры многослойной нейронной сети,
обучаемой по алгоритму обратного распространения ошибки применяется как адаптационный алгоритм. Данный алгоритм используется для управления асинхронным электродвигателем, имеющим несколько выходов и входов, т.е., многомерным объектом. В качестве примера использования данной системы мы исследовали управление динамическим объектом – электроприводом насосной станции. Полученные результаты испытаний показали эффективность использования нейросетевых алгоритмов в контроллерах
для управления сложными объектами.
1. Введение
Классическая теория линейного оптимального управления в применении к многомерным объектам имеет множество ограничений, из-за сложности представления проектируемых задач. Данная теория также включает разработку математической модели
объекта управления, описывающую динамическую систему и применение аналитических подходов к интерпретации закона управления. Более того, математическая модель
может быть настолько сложна, что имеющиеся средства электронно-вычислительной
машины (ЭВМ) не будут способны удовлетворять требованиям по скорости вычисления в реальном времени технологического процесса. Также, система может изменяться
непрерывно с течением времени и иметь параметры, которые невозможно представить
в виде модели, но которые четко описываются в вербальной форме и знаниях экспертов. Вышеуказанные проблемы требуют переоценки существующих методов автоматизации производства и техник управления на основе классических алгоритмов. Мотивированные способностями высших биологических систем к обучению и управлению в
сложных условиях, ученые предложили применить искусственные нейронные сети
(ИНС) к области управления. Способности к парольным вычислениям, нелинейной организации и самообучению данных сетей явились ключевыми факторами для разработки интеллектуальных управляющих систем.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4486
Модель нейрона и реализуемость ее на ЭВМ впервые была предложена Маккаллоком и Питтсом в 1943 [1]. С 1988 года стали появляться работы, посвященные нейроконтролю и различным путям применения нейронных сетей к управлению объектами.
Некоторые работы были посвящены исследованию гибридных систем (нейронных сетей и существующих контроллеров и регуляторов) с возможностью подстройки параметров контроллеров. В то время как другие работы были нацелены на применение
нейронных сетей в качестве адаптационных механизмов, в которых выходные параметры адаптируются согласно задающим параметрам входов по прямому методу или методу обратной связи методу, или объединяющему и тот и другой методы.
Saerens M. и Soquet A. [2] представили возможность использования метода аппроксимации к оценке ошибки в сети обратного распространения, что позволяет нейронным
сетям адаптироваться в изучении объекта управления. Goldenthal W и Farrell J. представили алгоритм обучения, который позволяет успешно применять нейронные сети в задачах адаптации к динамическим системам. В данной работе обучение построено на
расширенном методе обратного распространения ошибки, включающем приближения,
подобные алгоритму градиентного спуска. Narendra KS, Parthasarathy K., Nguyen D,
Widrow B., Wu QH, Hogg BW и Irwin GW [3-5]разработали непрямые адаптивные методы контроля на основе нейронных сетей с целью одновременной идентификации объекта и управления им. Данные методы успешно применены в управлении дискретными
системами и требуют наличие двух ИНС: 1 – для идентификации объекта управления, 2
– для генерации сценария управления и адаптации. Большинство предыдущих работ на
управление линейными объектами. Однако, в масштабах производственных процессов
транспорта и подготовки нефти необходимо учитывать влияние многих параметров на
технологический процесс.
2. Нейроконтроллер
2.1. Постановка цели и задач
Искусственные нейронные сети представляют собой модель биологического нейрона человеческого мозга. Элементы ИНС сильно связаны между собой, параллельные
и перекрестные связи создают сети простых адаптивных элементов согласно их структурной иерархической организации, которые направлены на взаимодействие с объектами реального мира подобно действию человеческого мышления. Основной целью
тренировки нейронных сетей является выбор весовых коэффициентов (весов) данной
сети посредством такого ее обучения, чтобы было соответствие между необходимыми
сигналами входа/выхода.
Теория однослойной нейронной сети и алгоритм сходимости персептрона был
предложен в 1960 г. [6]. Сложности, с которыми встретились исследователи нейронных
сетей согласно [7] было то, что однослойные нейросети были очень ограничены и довольно просты, чтобы решать сложные задачи. Отсутствие подходящей процедуры
обучения ИНС в конечном счете привело к снижению интереса к нейронным сетям в
конце 1960-х. Однако произошло событие, которое помогло устранить эти сложности –
разработка алгоритма обратного распространения ошибки [6]. Входные сигналы xi, умножаются на весовые коэффициенты wi, которые также называются синаптическими
весами и суммируются в результирующий сигнал, смещенный на величину w0:
n
(1)
Si wi xi w0 , y f ( Si ) .
i 1
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4487
где x1, x2, ... , xn – входные сигналы; w1 , w2 ,... , wn – синаптические веса n-го нейрона; Si
– функция входных воздействий и порогового элемента w0; f функция активации; y –
выходной сигнал нейрона.
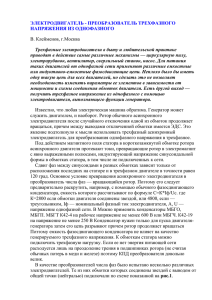
Функция (1) подается на вход активационной функции нейрона f (рис. 1).
Рис. 1. Модель нейрона.
На рис. 1 представлена сигмоидальная функция f.
f → (–∞, +∞) → (–1, +1) и f (0) = 0, т.е.
1
(2)
f ( x)
.
1 e x
Также, в связи с быстрым развитием полупроводниковых устройств и появлением
новых методов управления асинхронными электродвигателями (АД) – field oriented
control, методы feedback linearization и variable structure with sliding mode позволило
значительно расширить область применения таких приводов [8] за счет применения
нейронных сетей. В классической схеме векторного управления (d, q) q-оси потока
ротора стремятся к нулю, а d-оси амплитуды потока ротора становятся постоянным
значением. Следовательно, потоком и моментом АД возможно управлять независимо.
Параметрическая неопределенность асинхронного электродвигателя является
следствием изменения его температурного режима и динамической нагрузки.
Существующие адаптивные контроллеры могут быть пригодными в тех механизмах,
параметры которых либо остаются постоянными либо изменяются очень медленно [9,
10].
Целью данной работы является расширение функциональных возможностей
управления асинхронными электродвигателями с применением методов нейронных
сетей. К основным задачам относятся: разработка программного модуля системы
управления АД на основе нейронной сети, адаптация процессов управления к
изменяющимся параметрам нагрузки, т.е к динамической нагрузке, реализация всей
системы для управления в реальном масштабе времени быстродействующим
технологическим процессом.
2.2. Математическая модель АД
Решение задачи математического моделирования связано с выбором системы
координат, так как ток, потокосцепление и напряжение электродвигателя
представляется в виде вектора и данные параметры связаны с соответствующей
обмоткой (статора или ротора). Жестко связанной со статором является система
координат, ориентированная по осям (α, β), с ротором – по осям (d, q), по осям (u, ν)
является вращающейся относительно неподвижного статора со скоростью ωс.
Уравнение Кирхгофа для АД имеет вид [11-13]:
d
(3)
U1 I1 R1 1 jc1 :
dt
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4488
d 2
0 I2 R2
j (c ел ) 2 .
dt
где U1 – напряжение статора; I1, I2 – ток статора и ротора; R1, R2 – активное
электрическое сопротивление статора и ротора; – потокосцепление статора и
ротора; ел pn – угловая скорость электрическая; рп – число пар полюсов
двигателя; – угловая скорость двигателя.
Потокосцепления статора и ротора определяются следующими выражениями:
1 L1 I1 L12 I2 :
(5)
(6)
L I L I .
(4)
2
12 1
2 2
где L1, L2, L12 – индуктивность обмотки статора, ротора и их взаимоиндуктивность.
Векторы напряжения, токов и потокосцепления представляются суммой проекций
на оси (U, V),
I1 i1U ji1V ;
I1 i1U ji1V ; 1 1U j 1V ;
U U jU ; I i ji ; j .
1
1U
1V
2
2U
2V
2
2U
2V
Из уравнения (6) определяется выражения для тока ротора:
1
L
(7)
I2 2 12 I1.
L2
L2
После подстановки (7) в (4) получается:
1
L
d 2
0 2 12 I1 R2
j (c ел ) 2 .
L2
dt
L2
В операторной форме:
R
L
0 2 2 12 R2 I1 p 2 j (c ел ) 2 .
L2
L2
Рис. 2. Переменные в системе координат (U, V).
R2
.
L2
После чего, уравнение (4) примет вид:
(8)
0 ( p j (c ел )) 2 L2 I1.
Из (5) с учетом (6) и (7) находится выражение для потокосцепления статора
1
LL L 2
L
L
L
(9)
1 L1 I1 L12 2 12 I1 1 2 12 I1 12 2 I1 12 2 ,
L2
L2
L2
L2
L2
Параметр в (7) определяется:
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4489
2
( L1 L2 L12
)
.
L2
После подстановки (9) в (1) выражение для напряжения принимает вид:
L
L
d
U1 I1 R1 I1 12 2 jc I1 12 2 .
dt
L2
L2
или в операторной форме:
L
L
U1 I1 R1 p I1 p 12 2 jc I1 jc 12 2 :
L2
L2
L
U1 I1 ( R1 ( p jc )) 12 ( p jc ) 2 .
(10)
L2
После аналогичных замен для цепи ротора получается преобразованная система
уравнений, которая описывает процессы в асинхронном двигателе:
L
U1 I1 ( R1 ( p jc )) 12 ( p jc ) 2 ;
L2
(11)
0 ( p j ( )) L I .
где
c
ел
2
2
1
Уравнение 1 (11) в системе координат (U, V) имеет вид:
L
U1U jU1V (i1U ji1V )( R1 ( p jc )) 12 ( p jc )( 2U j 2V )
L2
или
U1U jU1V ( R1 p)i1U j ( R1 p)i1V jc i1U
c i1V
L12
L
L
L
p 2U j 12 c 2U 12 p 2V 12 c 2V
L2
L2
L2
L2
U1U jU1V ( R1 p )i1U j ( R1 p)i1V jc i1U
(12)
(13)
L12
L
L
L
p 2U j 12 c 2U 12 p 2V 12 c 2V
L2
L2
L2
L2
Проекции вектора напряжения (11) и (13) имеют следующее значения:
L
L
U1U ( R1 p)i1U c i1V 12 p 2U 12 c 2V
L2
L2
c i1V
L12
L
p 2U 12 p 2V
L2
L2
Аналогично для второго уравнения системы (11)
0 ( p j ( ))(
j ) L (i
ji
U1V ( R1 p)i1V c i1U
c
или
ел
2U
2V
12
2U
2V
)
0 ( p ) 2U j (c ел ) 2U j ( p ) 2V
(c ел ) 2V L12 i2U jL12 i2V )
Проекции вектора имеют следующее значение:
0 ( p ) 2U (c ел ) 2V L12 i2U
(14)
0 ( p ) 2V (c ел ) 2U L12 i2V
Переход к системе координат ( ) осуществляется при условиях U=, V=,
c=0:
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4490
(15)
(16)
p 2 L12 i1 ел 2 2
p 2 L12 i1 ел 2 2
i1
L12
1
p 2
U1
R1 p
L2
1
L12
p 2
U1
R1 p
L2
Выражение для момента асинхронного двигателя имеет вид:
3
M Pn L12 I m ( I1 I2 ) ,
2
где
I 2 i2U ji2V ;
Произведение токов равно:
1
1
L
L
I1 I2 I1 2 12 I1 I1 2 12 i1U 2 i1V 2
L2 L2
L2
L2
(17)
i1
1
1
L
L
I1 I2 I1 2 12 I1 I1 2 12 i1U 2 i1V 2
L2 L2
L2
L2
1
L
1
(i1U ji1V )( 2U j 2V ) 12 i1U 2 i1V 2 (i1U 2U 2V i1V )
L2
L2
L2
L
1
1
(i1U ji1V )( 2U j 2V ) 12 i1U 2 i1V 2 (i1U 2U 2V i1V )
L2
L2
L2
L
1
j (i1U 2V i1V 2U ) 12 i1U 2 i1V 2 ;
L2
L2
Поэтому выражение для момента в координатах (U-V) принимает вид:
3 L
M Pn 12 (i1V 1U i1U 1V )
2 L2
После перехода в координаты статора ( ) момент двигателя равняется:
3 L
(18)
M Pn 12 (i1 2 i1 2 )
2 L2
С учетом (18) механическая часть электродвигателя описывается известным уравнением динамики:
d
J1 1 M M C
(19)
dt
где J1 – момент инерции электродвигателя; Мс – статический момент.
Трехфазный асинхронный двигатель питается от сети симметричным синусоидальным напряжением (20):
U A U m sin 2 f1t
2
U B U m sin 2 f1t
3
2
U C U m sin 2 f1t
3
где Um – амплитуда питающего напряжения; f1 – частота питающего напряжения.
(20)
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4491
Преобразование координат от одной системы к другой происходит согласно следующим выражениям:
U A U B UC 0
3
U1 U A U C cos 60o U B cos 60o U A U C U B U A
2
3
U1 U B cos 30o U C cos 30o
U B U C
2
Также, возможно представление систем (15-17) в векторной форме для целей реализации векторного управления. В данном случае основные параметры будут опреде
ляться на основе соотношений проекции вектора 2 на оси ортогональной системы
координат d, q – 2 d 2 ; 2 q 0 , так как при этом совмещаются ось x вращающейся
координатной системы (x, y) с вектором потокосцепления ротора 2 .
2.3. Центробежный насос как объект управления
Основными параметрами насоса являются напор (Н) и подача (Q). В общем виде
насос как объект управления описывается диференциальным уравнением [14]:
(21)
m
H
Q s 2 (a a ф )Q2 s 2 0н
2 s 2 H ст ,
2
g
н
где m – масса води в насосе и трубопроводах; g –ускорение свободного падения; –
плотность жидкости.
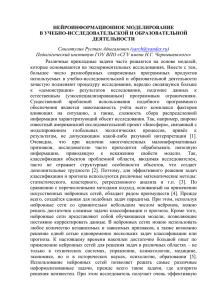
На рис. 3 насосный агрегат представлен как объект управления согласно (21).
Рис. 3. Функциональная схема насосного агрегата (АД – асинхронный двигатель; ЦН–
центробежный насос; Us – напряжение статора, В; fs – частота напряжения статора, Гц;
– механическая угловая скорость вращения ротора и рабочего колеса насоса, рад/с;
Mс – статический момент нагрузки на валу двигателя, Нм; Hнас – напор на выходе насоса, м; Hвх – напор на входе насоса, м; Q – производительность насоса, м3/с; Sг – гидравлическое сопротивление магистрали, с2/м5.
Как известно, нагрузка центробежных и осевых насосов, вентиляторов и других
механизмов вентиляторного типа называется вентиляторной нагрузкой. Статический
момент в подобных механизмах зависит от скорости вращения рабочего колеса во второй степени. Для вывода зависимости момента сопротивления на валу двигателя от его
скорости вращения необходимо иметь математические выражения характеристики насоса и характеристики трубопровода.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4492
Помимо изменений потока жидкости на насосной станции, параметры перекачиваемых нефтепродуктов (температура, напор и др.) в трубопроводе также подвергаются
изменениям из-за их изменений со стороны окружающей среды и других факторов.
Удельные потери напора насоса возрастают при увеличении вязкости эмульсии и
при высокой концентрации битумных нефтяных фаз в потоке жидкости. В связи с этим,
концентрацию перекачиваемой жидкости при работе центробежных насосов можно
представить как регулируемый параметр. Данный параметр в совокупности с необходимым расходом жидкости может влиять как на энергетические, так и на гидравлические характеристики насосного агрегата системы транспорта и подготовки нефти. Следовательно, мощность насоса N можно определить [15]:
D 12 3
(22)
N 0
Lv ,
8 0
где 1 , 0 – плотности перекачиваемой эмульсии и чистой жидкости (воды), кг/м3; L –
длина трубопровода, м; v – средняя скорость потока перекачиваемой эмульсии, м/c; η –
КПД.
Из (22) формула для регулирования частоты вращения насосного агрегата может
быть выражена в виде (23):
1
n1 no co ж
,
(23)
1 1
где no – номинальная частота вращения насоса, 1 – плотность перекачиваемой эмульсии, ж – заданная плотность вязкой нефти.
3. Нейросетевой контроллер скорости электродвигателя
3.1. Концепция управления
С целью решения задач распознавания или аппроксимации функций многослойные
сети прямого распространения подвергаются корректировке весовых коэффициентов.
Данная корректировка осуществляется на основе разработанных алгоритмов обучения
нейронных сетей, которые бывают трех видов [16-19]:
Обучение с учителем. Задается набор обучающих векторов – входных значений и
желаемых выходов нейронной сети. Весовые коэффициенты в процессе обучения
подбираются таким образом, чтобы по полученным входам получать выходы максимально близкие к заданным.
Обучение с оценкой. Изначально не задается желаемый вектор выходных сигналов,
однако по результатам работы нейронная сеть получает положительную или отрицательную оценку.
Обучение без учителя. Задается набор входных векторов, которые обрабатываются
на основе законов самоорганизации, что приводит нейронную сеть к состоянию,
при котором она способна решать поставленные задачи.
Схема нейронного управления с эмулятором и контроллером представлена на рисунке. В данном случае нейроконтроллер обучается на инверсной модели объекта
управления, а нейроэмулятор – на реальной модели объекта управления.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4493
Рис. 4. Схема нейронного управления с эмулятором и контроллером.
Нейроконтроллер обучается на основе нейроэмулятора, который обучается с помощью метода обратного распространения ошибки. Для обучения нейроэмулятора зададим многослойную сеть прямого распространения со случайно подобранными весовыми коэффициентами и обучающее множество, состоящее из пар вход сети – желаемый выход X , D , а также выходное значение сети Y.
Задача обучения заключается в подборе весовых коэффициентов для минимизации
некоторой целевой функции. Целевая функция – сумма квадратов ошибок сети на примерах из обучающего множества, а минимизация данного функционала – это решение
по методу наименьших квадратов.
E ( w) ( y (j N, p) d j , p ) 2
(24)
j, p
(N )
где y j , p реальный выход N-го выходного слоя сети для p-го нейрона на j-м обучающем примере, d j , p желаемый выход.
Для нахождения минимума и определения весовых коэффициентов, входящих в со(N )
став функции y j , p ( x) будем использовать метод наискорейшего спуска, при котором
на каждом шаге обучения будем изменять весовые коэффициенты согласно формуле:
E
(25)
wij( n )
wij( n )
(n )
где wij
весовой коэффициент, созывающий j-й нейрон n-го слоя и i-й нейрон (n–1)
слоя, – параметр скорости обучения.
Для этого, по полученным весовым коэффициентам сети необходимо определить
частные производные целевой функции E:
(n)
(n)
E
E dy j s j
(26)
wij( n ) y (jn ) ds (jn ) wij( n )
(n )
(n )
где y j – выход, s j – сума входов j-го нейрона n-го слоя. Зная функцию активации,
можно вычислить dy (jn ) / ds (jn ) . Для сигмоидальной функции будет равняться:
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4494
dy (jn )
(27)
ds
(n)
j
y (jn ) (1 y (jn ) ) .
(n )
(n )
Выход i-го нейрона (n-1)-го слоя s j / wij
s (jn )
(28)
yi( n 1) .
(n)
wij
можно представить:
(N )
Таким образом, продифференцировав (26) по y j с учетом (28) и (1) по весам
нейронов выходного слоя вычислим частные производные целевой функции:
dy (j N ) ( N 1)
E
(N )
(29)
.
( y j d j ) ( N ) yi
wij( N )
ds j
Введем замену в (29):
(n)
E dy j
(n)
(30)
j (n) (n) .
y j ds j
Значения нейронов в выходном слое на основе (30):
dy (jn )
(N )
(N )
(31)
j ( y j d j ) (n) .
ds j
Для определения y (jn ) весовых коэффициентов нейронов внутренних слоев запишем (26) в следующем виде:
E
E dyk( n 1) sk( n 1)
E dyk( n 1) ( n 1)
(32)
k y ( n1) ds ( n1) y ( n ) k y ( n1) ds ( n1) w jk .
y (jn )
k
k
j
k
k
Заметим, что в k( n 1)
k
ния
E dyk( n 1)
, что позволяет через (24) выражать значе
yk( n 1) dsk( n 1)
)
( n 1)
(n
слоя. Получить
j нейронов n-го слоя посредством нейронов (n+1)-го k
значения
)
(n
j для вех нейронов всех слоев можно через рекурсивную формулу для по-
следнего слоя
(j N ) :
(33)
(j n ) k( n 1) w(jkn 1) j .
ds
(34)
dy
k
j
Таким образом, формула (25) для коррекции весовых коэффициентов:
wij( n ) (j n ) yi( n 1) .
Таким образом, получим алгоритм обучения нейроэмулятора с помощью алгоритма
обратного распространения:
a) Присваивание произвольных начальных значений весовым коэффициентам нейросети и получение значений целевой функции при данных значениях.
b) На вход нейронной сети подается вектор обучающего множества, и затем вычисляются значения на выходе нейронной сети, которые формирую вектор памяти из
значений каждого нейрона.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4495
c) Вычисляется значение (31) (j N ) нейронов в выходном слое, а по рекурсивной
формуле (33) вычисляются значения
)
( n 1)
(n
посредством нейронов (n+1)-го k
j
слоя, а затем по (34) изменяются веса нейронной сети.
d) Корректировка весовых коэффициентов сети:
wij( n ) wij( n ) wij( n ) .
e) Далее, рассчитывается целевая функция (24) и, если она относительно мала, можно считать, что нейронная сеть успешно прошла процедуру обучения. В противном случае, переходим к выполнению шага b.
3.2. Нейросетевой регулятор скорости АД
Для систем векторного управления система уравнений 1 приводится к виду рис. 1.7
на основе схемы замещения асинхронного электродвигателя во вращающейся системе
координат d, q со скоростью эл1 , жестко связанной с ротором и ориентированной по
вектору его потокосцепления. Проекции векторов напряжений, токов и потокосцеплений статорной и роторной обмоток на оси координатной системы d, q являются постоянными величинами, которые в установившихся режимах работы двигателя будут численно постоянны по значениям.
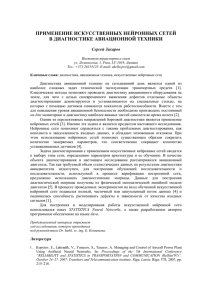
Структурная схема нейросетевого регулятора скорости асинхронного электродвигателя представлена на рис. 5.
Рис. 5. Структурная схема нейросетевого регулятора скорости АД
Нейросетевой регулятор скорости АД состоит из линеаризатора сигналов обратной
связи (ОС), поступающих с нейроконтроллера (НК), нейроэмулятора, в который загружаются обучающие множества данных, блока памяти, на основе которой происходит
процесс прогнозирования ошибки выходного сигнала нейронной сети объекта управления, асинхронного электродвигателя (АД), широтно-импульсного модулятора (ШИМ)
напряжения питания, поступающего с инвертора и наблюдателя потока (НП) электродвигателя.
Обучение нейронной сети в нейроэмуляторе осуществляется относительно уравнения скорости. В режиме обучения этот набор данных был использован для установления взаимосвязи весов сети. После того, как эти веса были определены, данные тестиXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4496
рования (отличаются от обучающих данных) подаются в сеть нейроэмулятора для
оценки скорости и проверки его обобщающей способности. Обучение происходит за
5000 эпох, а тестирование – 500 эпох. Результаты рис. 6-8, демонстрируют способность
обученной нейронной сети к регистрации и управлению скоростью АД. Модель нейронной сети нейроэмулятора обучался только при номинальных условиях скорости, поэтому при низких скоростях электродвигателя наблюдались колебания при работе
электродвигателя.
Рис. 6. Результаты моделирования
без нейроконтроллера.
Рис. 7. Результаты моделирования
с нейроконтроллером.
Рис. 8. Результаты моделирования предсказания и снижения ошибки скорости АД.
На рис. 6 и рис. 7, нагрузка изменяется от 0 до 80 Нм в момент времени 0,6 с и от
80 до 40 Нм в момент времени 0,8 с соответственно. Прогнозирование ошибки в нейросетевой модели приведена на рис. 8. В начальной стадии при адаптации модели наблюдаются некоторые колебания на выходе нейронной сети, что связано с новыми условиями эксплуатации, что также влияет на крутящий момент. Однако, нейроконтроллер
способен поддерживать ошибку на минимальных значениях и адаптировать систему
управления к новым условиям, что подтверждает надежность нейронной сети на основе
нейроэмулятора.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4497
4. Заключение
Таким образом, искусственные нейронные сети являются новым видом
математических моделей для управления динамическими объектами, так как построены
по принципу организации и функционирования биологических нервных клеток мозга,
что позволяет ИНС обучаться на примерах, обобщать и параллельно обрабатывать
поступающую информацию, дает возможность ассоциативности и гарантирует
высокую надежность системе управления.
В данной работе на основе модели нейроконтроллера с нейроэмулятором,
включающие многослойную нейронную сеть прямого распространения было
реализовано управление асинхронным электродвигателем насосного агрегата.
Нейронная сеть нейроэмулятора обучалась на основе алгоритма обратного
распространения ошибки, а сам нейроконтроллер работал в режиме предсказания и
уменьшения ошибки.
Данная модель показала хорошие показатели при управлении объектом в условиях
динамической нагрузки электродвигателя. Однако, наблюдалось увеличение ошибки в
зоне низких скоростей, что можно объяснить обучением на основе номинального
режима работы АД.
Ниже представлен листинг возвращения среднеквадратической ошибки в нейронную сеть с последующим сбросом ошибки до нуля в программной среде C++:
/// </summary>
/// <returns>The current error for the
/// neural network.</returns>
public double CalculateRMS()
{
double err = Math.Sqrt(this.globalError /
(this.setSize));
return err;
}
/// <summary>
/// Reset the error accumulation to zero.
/// </summary>
public void Reset()
{
this.globalError = 0;
this.setSize = 0;
}
Список литературы
1.
2.
3.
4.
5.
6.
7.
McCulloch W. S., Pitts W. A logical calculus of ideas immanent in nervous activity // Bulletin Mathematical
Biophysics. 1943. Vol. 5. P. 115-133.
Saerens M., Soquet A. Neural controller based on back-propagation algorithm // IEE Proc. F. 1991. Vol.
138, No. 1. P. 55-62.
Goldenthal W., Farrell J. Application of neural network to automatic control // Proc AIAA Conference on
Guidance Navigation and Control. 1990. P. 1108-1112.
Hunt K.J., Sbarbaro D., Zbikowski R., Gawthrop P.J. Neural networks for control systems – a survey //
Automatica. 1992. Vol. 28, No. 6. P. 1083-1112.
Narendra KS, Parthasarathy K. Identification and control of dynamical systems using neural networks //
IEEE Trans Neural Networks. 1990. Vol. 1, No. 1. P. 4-27.
Rumelhart D., Hinton G., Williams R. Learning internal representation by error propagation. Distributed
Parallel Processing. MIT Press, Cambridge, MA, 1986.
Minsky M., Papert S. Perceptrons. MIT Press, Cambridge, MA, 1969.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.
4498
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
Vas P. Vector Control of Ac Machines. Clarendon press, 1990.
Levin A.U., Narendra K.S. Control of Nonlinear Dynamical Systems Using Neural Networks: Controllability and Stabilization // IEEE Transactions on Neural Networks. Vol. 4, No. 2.
Narendra K. S., Parthasarathy K. Identification and Control of Dynamical Systems Using Neural Networks
// IEEE Transactions on Neural Networks. Vol. 1, No. 1.
Nguyen D., Widrow B. Neural networks for self-learning control systems // Int. J. Control. 1991. Vol. 54,
No. 6. P. 1439-1451.
Wu Q.H., Hogg B.W., Irwin G.W. A neural network regulator for turbogenerators // IEEE Trans. Neural
Networks. 1992. Vol. 3, No. 1. P. 95-100.
Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: учебное пособие для
вузов. Л.: Энергоиздат. Леиннгр. отд-ние, 1982. 392 с.
Лезнев Б.С. Энергосбережение и регулируемый привод в насосных установках. М.: ИК «Ягорба»Биоинформсервис, 1998.
Demyanov S. Mathematical simulation of viscous-plastic flow of paste pulps with variable parameters //
Materialy XLVIII Sesji Pionu Gorniczego. Krakow, 2007. P. 175.
Галушкин А.И. Основы нейроуправления // Нейрокомпьютер. 2002. № 9-10. С. 87-106.
Терехов В.А., Ефимов Д.В., Тюкин И.Ю. Нейросетевые системы управления. М.: Высшая школа,
2002. 183 с.
Пшихопов В.Х., Шанин Д.А., Медведев М.Ю. Построение нейросетевых регуляторов для синтеза
адаптивных систем управления // Информационно-измерительные и управляющие системы. 2008. №
3.
Омату С., Халид М., Юсоф Р. Нейроуправления и его приложения. М.: ИПРЖР, 2000. Серия «Нейрокомпьютеры и их применение». Книга 2. 2008.
David AW, Donald AS. Handbook of Intelligent Control. New York: Van Nostrand Reinhold, 1992.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г.