У МОТОРНОЕ ПОЛЕ И ЗОНЫ ВИДИМОСТИ ЧЕЛОВЕКА
advertisement

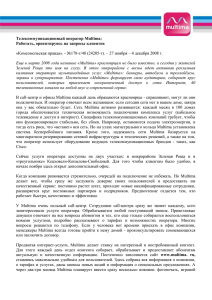
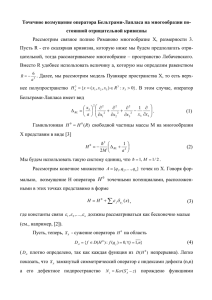
В.М. Рачек, М.Н. Вьюшина, А.Е. Кривенко Московский государственный горный университет МОТОРНОЕ ПОЛЕ И ЗОНЫ ВИДИМОСТИ ЧЕЛОВЕКА В СИСТЕМЕ ОПЕРАТОР - ГОРНАЯ МАШИНА У чет эргономических требований при проектировании оборудования определяет комфортность условий работы оператора, что непосредственным образом сказывается на его физическом и психологическом утомлении, скорости и точности отработки действий по управлению оборудованием. Все это в конечном счете направлено на создание безопасных условий труда, повышение производительности и мотивацию к работе. Рис. 1. Зоны досягаемости оператора крепи при работе в позе "сидя на пятках' 1 - оптимальная зона досягаемости; 2 - максимальная зона досягаемости При подготовке к моделированию в математической модели использовались чертежи комплекса КМ-138: монтажный, сборки крепи, перекрытия, основания, стоек, а также описание пульта управления крепью. При эксплуатации комплексов оборудования для подземной добычи угля в числе эргономических показателей важное место занимают параметры рабочего пространства, опреде103 ляющие моторное и зрительное поля оператора. В качестве примера нами приводится анализ моторного поля оператора механизированной крепи очистного комплекса КМ-138 с использованием математической модели компьютерного фантома [1]. Рабочее пространство по горизонтали ограничено стойками крепи. В математической модели они рассматриваются как набор цилиндрических поверхностей. Ширина рабочего простран-ства, в котором может располагаться оператор без учета подвижности рук, равна расстоянию между рядами стоек. Положение оператора в рабочем пространстве определяется его антропометрическими параметрами [2,3]. Длина руки мужчины колеблется от 0.71 до 0.84 м. При захвате органа управления она сокращается до 0.583-0.713 м соответственно. Для управления крепью оператор должен находиться не далее 0.55-0.7 м от пульта управления в зависимости от размеров тела. Высота рабочего пространства оператора крепи (рис. 1) определяется мощностью пласта за вычетом толщины перекрытия и основания и величины подштыбовок. В расчете принят пологий пласт мощностью 1.73 м. В выбранных условиях высота рабочего пространства составила 1.29 м. При такой высоте можно работать в позах "стоя на четвереньках", "стоя на колене с присаживанием на пятку", "сидя на корточках", "сидя на пятках" [ 3]. При работе в позах "стоя на колене", "сидя на пятках" и "сидя на корточках" (т.е. с вертикальным корпусом) размеры и форма оптимальной зоны досягаемости аналогичны позе "стоя". Максимальную зону досягаемости несколько ограничивают вынесенные вперед ноги оператора. Поэтому в нижней области максимальной зоны досягаемости обычно не располагают органов управления и средств индикации, т.к. они будут ограничивать свободу движения оператора и не застрахованы от непреднамеренного включения или случайной поломки. Для позы "стоя на четвереньках" оптимальная зона досягаемости аналогична позе "стоя согнувшись", но в данном случае оптимальная и максимальная зоны моторного поля оператора ограничены снизу опорной поверхностью, т.е. основанием крепи. Проекция зоны на сагиттальную плоскость (т.е. плоскость симметрии тела человека) определяется следующим образом [3]: 1. Ближняя нижняя точка - плечо параллельно корпусу, локоть прижат к телу, предплечье перпендикулярно корпусу. 2. Ближняя верхняя точка - предплечье поднято вверх на 45° 3. Дальняя нижняя точка - рука выпрямлена и кисть находится на линии продолжения предплечья в положении 1. 4. Дальняя верхняя точка - рука выпрямлена и составляет с туловищем угол 135°. При работе стоя на четвереньках, одна рука чаще левая, играет роль опорной. Границы зон моторного поля оператора были определены путем расчета кинематических цепей математической модели [1]. Результаты расчета показали, что пульт управления расположен выше оптимальных зон досягаемости для любой из возможных рабочих поз и только в положении "стоя на колене" нижняя часть пульта (примерно 100 мм от нижнего края) находятся в оптимальной зоне. остальная часть пульта управления попадает в максимальную зону досягаемости. На рис. 1 показан пример расположения зон моторного поля оператора с длиной руки 0.76 м при работе в позе "сидя на пятках". Наиболее эффективный контроль за приборами и органами управления достигается при их размещении в оптимальной зоне видимости и досягаемости. С использованием компьютерного фантома оператора на основании математи104 ческого моделирования [1] была произведена оценка зон видимости оператора механизированной крепи очистного комплекса. Имеющаяся модель рабочего пространства была дополнена информацией о расположении пульта управления и средств индикации на рабочем месте. В зависимости от их расположения выделялись зоны рабочего пространства, в которых оператор должен четко различать объекты. Одной из таких зон является верхняя часть пульта управления крепью. Основные параметры рабочего пространства: высота, ширина, протяженность, формы ограничивающих поверхностей - остаются такими же как при определении зон моторного поля. Рис. 2. Нормальная зона видимости оператора крепи при работе в позе "сидя на пятках " ная линия зрения направлена вниз и оператор вынужден держать голову поднятой для достижения нормального обзора рабочего пространства. При этом статически напряжены мышцы затылка и быстро наступает утомление. В данном случае анализ рабочего пространства выполнен по условиям нормальной видимости. Зона нормальной видимости ограничивается конической поверхностью, образующая которой вращается в верхней полуплоскости под углом 30° к нормальной линии зрения. В нижней полуплоскости угол плавно увеличивается до 40°. В математической модели зоны видимости считаются продолжением кинематической цепи головы [1]. Зрительное поле можно рассматривать как конус с направляющей сложной формы. Различают зоны четкой, нормальной и, ближе к границам, плохой видимости и зоны нормального различения цветов [3]. Для удобства при конструировании принято считать, что зоны видимости ограничены коническими поверхностями. В качестве оси зоны видимости используется нормальная линия взгляда, идущая от переносицы перпендикулярно линии, соединяющей центры зрачков вниз под углом 15° к горизонтальной плоскости. При работе с вертикальным корпусом такое направление соответствует минимальному напряжению мышц затылка. Если работа выполняется в положении стоя на четвереньках, то нормаль105 СПИСОК ЛИТЕРАТУРЫ Результаты расчета показали, что пульт управления целиком располагается в пределах зоны нормальной видимости. Для обзора всей рабочей зоны оператор вынужден поворачивать голову на угол до 25° от сагиттальной плоскости. Удержание головы в этом положении вызывает статическое напряжение мышц шеи и затылка, что следует считать неудовлетворительным. На рис. 2. показаны границы нормальной видимости при работе оператора с пультом управления. 1. Выошина М.Н., Жура В.П., Кривенко А.Е. Математическая модель человека в системе "оператор - горная машина". Горный информационно-аналитический бюллетень. № 4, 1996,-с. 91-93. 2. Антропометрический атлас. Методические рекомендации. М.: ВНИИТ, 1977. 3. Инженерная психология в применении к проектированию оборудования. П./р. Ломова Б.Ф., Петрова В.И. М.: Машиностроение, 1971. © В.М.Рачек, М.Н.Вьюшина, А.Е.Кривенко 106