И.А. Готюр, В.Ю. Жуков, Ю.В. Кулешов, С.В. Чернышев, Г.Г. Щукин
advertisement

МЕТЕОРОЛОГИЯ
И.А. Готюр, В.Ю. Жуков, Ю.В. Кулешов, С.В. Чернышев, Г.Г. Щукин
ДОППЛЕРОВСКИЙ РАДИОЛОКАЦИОННЫЙ МЕТОД
ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОЛЯ ВЕТРА
И НЕКОТОРЫЕ РЕЗУЛЬТАТЫ
I.A. Gotyur, V.Y. Zhukov U.V. Kuleshov, S.V. Chernyshev, G.G. Schukin
DOPPLER RADAR METHOD OF DETERMINING THE
CHARACTERISTICS OFTHE WIND FIELD AND SOME RESULTS
Приводится математическая формулировка задачи определения поля скорости ветра по результатам допплеровских измерений, производимых метеорологическим радиолокатором, а также способ её решения. Анализируются результаты
реализации способа определения ветра в малогабаритном допплеровском метеорологическом радиолокаторе.
Ключевые слова: радарная метеорология, опасные явления погоды, сдвиг
ветра, ДМРЛ, МРЛ.
The mathematical formulation of the problem of determining the wind velocity
field on the results of Doppler measurements made weather radar, as well as a way to
solve it is presented. The results of the implementation method for determining the
wind in a small Doppler weather radars is analyzed.
Key words: radar meteorology, severe weather, wind shear, DMRL, MRL.
1. Введение
В настоящее время в рамках единой государственной политики по обеспечению гидрометеорологической безопасности страны совершенствуется метеорологическая радиолокационная сеть. Морально и технически устаревшие
МРЛ-5, используемые в настоящее время на сети радиолокационных станций,
планируется заменить на допплеровские метеорологические радиолокаторы
(ДМРЛ) нового поколения. Такие радиолокаторы разработаны и проходят испытания на ОАО «НПО «ЛЭМЗ» и ОАО «Завод «Энергия». Особенностью данных радиолокаторов является возможность измерения допплеровской частоты
отражённого от гидрометеоров радиолокационного сигнала. Рассчитанная на
основе данных измерений радиальная составляющая скорости гидрометеоров
называется допплеровской скоростью.
С помощью допплеровских радиолокаторов возможно получать дополнительную радиолокационную информацию, а именно [1, 2]:
– идентификация областей атмосферы с критическими значениями ветра;
– обнаружение областей со значительными сдвигами ветра;
– определение мезоциклонов, являющихся предшественниками смерчей;
– обнаружение фронтов порывистости и линий шквалов;
– определение областей со значительными нисходящими потоками и т.д.
Поскольку ДМРЛ обеспечивает расчёт поля допплеровских скоростей ветра, которые представляют собой проекции вектора скорости ветра на ось диа66
УЧЕНЫЕ ЗАПИСКИ № 21
граммы направленности антенны, то можно говорить о частичной диагностике
поля скорости ветра. Также отметим, что в ДМРЛ, как и в обычном метеорологическом радиолокаторе, для диагностики поля ветра могут использоваться
трассеры, выявляемые на последовательности полей изображения радиолокационной отражаемости на основе использования корреляционно-экстремальных
алгоритмов. Однако допплеровские скорости ветра неоднозначны при их использовании для диагностики поля ветра. В свою очередь, способ диагностики поля
скоростей ветра по трассерам обладает существенными погрешностями, что обусловлено эффектами трансформации трассеров во времени, значительным осреднением по пространству, а также низкой детализацией получаемого поля ветра.
Предлагается использовать результаты расчёта допплеровских скоростей
ветра для оперативного определения поля ветра с достаточно высоким разрешением – порядка нескольких километров. Высокие оперативность и детализация диагностики поля ветра весьма важны в ряде прикладных задач, например,
при обеспечении посадки воздушных судов в неблагоприятных метеорологических условиях.
2. Постановка задачи
Допплеровский радиолокатор осуществляет измерения радиальных скоростей гидрометеоров в некоторой области (D ) . На рис. 1 представлены проекции
(K ) радиальной скорости, которые и измеряются радиолокатором. Для упроr
i
щения иллюстрации принципа действия предлагаемого способа считается, что
ДМРЛ находится в одной горизонтальной плоскости с гидрометеорами. Значе-
r
r
r
ния K i зависят от фактического вектора W скорости ветра. Если вектор W
r
будет другим, то будут другими и векторы K i в различных точках области (D ) .
y
W
x 2 , y3
α2
W
K2
x1 , y1
α3
K1
D
V
Рис. 1. Иллюстрация к постановке зада-
~r
чи определения W = U~,V~
r
по значениям K i в точках с координатами xi , yi
W
αi
xi , yi
Ki
0
ДМРЛ
U
x
67
МЕТЕОРОЛОГИЯ
~r
~ ~
Задача заключается в получении оценки скорости ветра ⎛⎜W = U ,V ⎞⎟ по
⎝
⎠
~
известным (измеренным допплеровским радиолокатором) оценкам K i – значеr
ний радиальных скоростей K i в точках с координатами xi , yi . Число измерений считается равным n (i ∈ 1, 2, ..., n ) .
3. Способ решения задачи
Для решении данной задачи используем допущение: в достаточно малой
(порядка нескольких километров) области (D ) атмосферы вектор скорости вет-
r
ра W считаем постоянным. Данное допущение правомерно в большей части облачной атмосферы, вне центральных областей интенсивных мощно-кучевых
облаков.
В рамках приведенной постановки (плоский горизонтальный случай) – за-
~r
r
дача может быть решена при наличии двух измерений K i . Однако оценки K i
r
r
r
~r
скорости K i рассчитываются с некоторой погрешностью ∆ i = K i − K i , кото-
~r
~ ~
рая, как правило, отлична от нуля. Поэтому W = U , V
будет рассчитываться
с некоторой ошибкой. Для того чтобы ее минимизировать, необходимо использовать более двух измерений K i .
Рассмотрим функцию, связывающую проекции U , V
r
вектора W со зна-
чением K i . Она имеет вид
f (U ,V , i ) = K i = U 2 + V 2 cos α i ,
(1)
r
r
где K i – модуль вектора; α i – угол между векторами W и K i . Если систему
координат расположить так, чтобы ДМРЛ располагался в начале координат, то
Uxi + Vyi
cos α i =
U + V 2 xi2 + yi2
2
~ ~
Для нахождения оценок U , V
.
(2)
используем метод наименьших квадратов
[3], для чего минимизируем функцию
(
)
n
~2
L = ∑ f (U , V , i ) − K ,
i =1
то есть
68
(3)
УЧЕНЫЕ ЗАПИСКИ № 21
~ ~
U ,V =
=
arg
{
~ ~
U ,V ∈ U ,V
arg
{
~ ~
U ,V ∈ U ,V
Д
}
min
Д
}
min L (U , V ) =
∑(
n
)
~ 2
f (U , V , i ) − K .
(4)
i =1
Для минимизации функции (3) необходимо взять от неё производные по
U и V , а полученные выражения приравнять нулю. В результате получается
следующая система уравнений:
⎧ n ⎡ x 2U + x y V ~
⎤
xi
⎪∑ ⎢ i 2 i 2 i − K i
⎥ = 0;
⎪⎪ i =1 ⎢⎣ xi + yi
xi2 + yi2 ⎥⎦
⎨
⎤
yi
⎪ n ⎡ yi2V + xi yiU ~
K
⎢
−
⎥ = 0.
∑
i
2
2
⎪
xi2 + yi2 ⎥⎦
⎪⎩ i =1 ⎢⎣ xi + yi
(5)
Система (5) может быть преобразована к виду
n
⎧⎡ n
⎡ n xi yi ⎤
xi2 ⎤
~
+
=
V
Ki
U
⎪ ⎢∑ 2
∑
∑
⎥
⎢
⎥
2
2
2
i =1
⎣ i =1 xi + yi ⎦
⎪⎣ i =1 xi + yi ⎦
⎨ n
n
⎡n
yi2 ⎤
xi yi ⎤
~
⎪⎡
+
=
V
Ki
U
∑
∑
∑
⎢
⎢
2
2⎥
2
2⎥
⎪⎣ i =1 xi + yi ⎦
i =1
⎣ i =1 xi + yi ⎦
⎩
В векторном виде система (6) может быть записана так:
A[2, 2 ]V 2 = L 2 ,
xi
x + yi2
.
yi
2
i
(6)
xi2 + yi2
(7)
где
A[2, 2 ]
⎡⎡ n
xi2 ⎤
⎢ ⎢∑ 2
⎥
x + yi2 ⎦
= ⎢ ⎣ i =n1 i
⎢⎡
xi yi ⎤
⎢ ⎢∑ 2
2⎥
⎢⎣ ⎣ i =1 xi + yi ⎦
⎡ n xi yi ⎤ ⎤
⎢∑ 2
2 ⎥⎥
⎣ i =1 xi + yi ⎦ ⎥ ,
⎡n
yi2 ⎤ ⎥
⎢∑ 2
2 ⎥⎥
⎣ i =1 xi + yi ⎦ ⎥⎦
⎡U ⎤
V2 =⎢ ⎥,
⎣V ⎦
L2
⎡n ~
⎢∑ K i
i =1
=⎢ n
⎢ ~
⎢∑ K i
⎣⎢ i =1
⎤
⎥
xi2 + yi2 ⎥
.
⎥
yi
⎥
xi2 + yi2 ⎦⎥
(8)
(9)
xi
(10)
69
МЕТЕОРОЛОГИЯ
~ ~
Из выражения (7) следует, что параметры U , V
следующим образом:
могут быть получены
~
⎡U ⎤
−1
⎢ ~ ⎥ = A[2, 2 ] L 2 .
⎣V ⎦
(11)
Выражение (11) представляет собой решение задачи нахождения составляющих скорости ветра, сформулированной выше, на основе использования
метода наименьших квадратов.
По своей сути задача определения поля ветра является обратной математической задачей. При решении таких задач хорошим тоном является нахождение
ответов на следующие вопросы: «Единственно ли получаемое решение?», «Является ли постановка задачи корректной в математическом смысле?», «Каково
качество решения?». С учётом ограничений на объём статьи, приведём некоторые выкладки, обеспечивающие получение теоретических оценок качества диагностики ветра предлагаемым способом.
Из постановки задачи понятно, что чем дальше область (D ) от ДМРЛ или
чем меньше размеры области (D ) или меньше число используемых измерений
допплеровских скоростей в точках области (D ) , тем должно быть хуже качество идентификации скорости ветра. Формализовано к этим выводам можно придти из следующих рассуждений. Будем следовать за практикой теоретического
оценивания качества определения координат в спутниковых радионавигационных системах ГЛОНАСС и GPS, где показателем качества является величина,
называемая геометрическим фактором [4]. Данная величина учитывает пространственное расположение друг относительно друга навигационных аппаратов и приёмника радионавигационных сигналов. По своей физической сути
геометрический фактор равен среднему квадратическому отклонению суммарной ошибки определения координат при условии, что средние квадратические
ошибки входных параметров радионавигационных измерений (псевдодальностей до навигационных КА) равны единице, ошибки являются центрированными и некоррелированными. Введём понятие геометрический фактор для оценивания качества определения ветра.
∧
Из (11) следует, что зональная проекция U скорости ветра является слу-
⎛
⎝
∧
⎞
⎠
∧
чайной функцией U ⎜ K i ⎟ случайных величин K i :
∧
∧
n ∧ ⎡ m x
n
n
m0,1 yi ⎤
Ki xi
Ki yi
⎛∧⎞
0, 0 i
⎥,
U =U⎜ Ki ⎟ = m0,0 ∑
+m0,1∑
=∑Ki ⎢
+
2
2
2
2
2
2
2
2
⎝ ⎠
i=1
i=1
xi + yi
xi + yi i=1 ⎢⎣ xi + yi
xi + yi ⎥⎦
∧
70
(12)
УЧЕНЫЕ ЗАПИСКИ № 21
где
∧
– символ случайной величины; mk ,s – элементы матрицы
⎡m0, 0
M [2 , 2 ] = ⎢
⎣ m1, 0
m0,1 ⎤
−1
≡ A[2, 2 ] ,
⎥
m1,1 ⎦
(13)
обратной к матрице A[2, 2 ] . Найдём математическое ожидание и среднее квадра∧
тическое отклонение случайной величины U в условиях допущений:
∧
∧
∧
M [K i ] = 0 ; D [K i ] = 1 ; σ [Ki ] = 1 для i = 1(1) n , (14)
где M [ ] , D[ ] , σ[ ] – операторы получения математического ожидания, дисперсии и среднего квадратического отклонения (СКО). Тогда
⎡n ∧⎡ m x
m0,1 yi ⎤ ⎤
⎡∧⎤
0, 0 i
⎢
⎢
⎥⎥ =
+
M ⎢U ⎥ = M ∑ K i
2
2 ⎥
⎢ i =1 ⎢ x 2 + y 2
⎣ ⎦
xi + yi ⎥⎦ ⎦
i
⎣ i
⎣
,
⎤
⎤
n ⎡⎡
∧
m0, 0 xi
m0,1 yi
⎥ M ⎡Ki ⎤⎥ = 0
= ∑ ⎢⎢
+
⎢ ⎥
2
2
2
2
i =1 ⎢ ⎢ x + y
xi + yi ⎥⎦ ⎣ ⎦ ⎥⎦
i
⎣⎣ i
2
⎤
⎡n ∧⎡ m x
⎤
⎤⎤ n ⎡⎡ m x
∧
m
y
m
y
0,0 i
0,1 i
0,0 i
0,1 i
⎡
⎤
⎡ ⎤ ⎢
⎢
⎥ D Ki ⎥ =
⎥⎥ = ∑ ⎢
D⎢U⎥ = D ∑Ki ⎢
+
+
⎢ ⎥
2
2
2
2
2
2
2
2
⎢
⎣ ⎦ ⎢ i=1 ⎢ xi + yi
xi + yi ⎥⎦⎥⎦ i=1 ⎢⎢⎣ xi + yi
xi + yi ⎥⎦ ⎣ ⎦⎥⎥
⎣
⎣
⎣
⎦
(15)
∧
2
n ⎡ m x
m0,1yi ⎤ n ⎡(m0,0xi + m0,1yi )⎤
0,0 i
⎥ = ∑⎢
= ∑⎢
+
⎥.
2
2
2
2
2
2
+
x
y
⎥
⎢
i=1
i=1 ⎣
x
y
x
y
+
+
i
i
⎦
i
i
i ⎦
⎣ i
2
(16)
∧
Аналогично для V :
∧
∧
⎡ (m1, 0 xi + m1,1 yi )⎤
M [V ] = 0 ; D [V ] = ∑ ⎢
;
σ
[
V
]
=
D
[
V
].
⎥
2
2
xi + y i
i =1 ⎣
⎢
⎦⎥
∧
∧
n
2
(17)
Назовём геометрическим фактором (определения ветра на основе измеренных допплеровских скоростей) G (n, x, y ) СКО модуля скорости ветра при выполнении условий (15)
⎡∧⎤
⎡∧⎤
G (n, x, y ) = D ⎢U ⎥ + D ⎢V ⎥ .
⎣ ⎦
⎣ ⎦
(18)
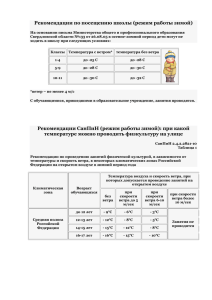
На рис. 2 представлен график поля геометрического фактора и графики изменения СКО проекций определяемой скорости ветра от числа измерений. Ин71
МЕТЕОРОЛОГИЯ
терпретируются рисунки следующим образом. Так, например, при расположении области (D ) на удалении 30 км по горизонтали от ДМРЛ геометрический
фактор равен, приблизительно, 4,5 – то есть при СКО измерений допплеровских
скоростей 1 м/с, СКО ошибок определения ветра будет равно приблизительно 7
м/с. При увеличении числа используемых измерений K i СКО ошибок определения проекций вектора скорости ветра уменьшаются.
а
б
Рис. 2. Поле значений геометрического фактора, по осям километры.
а – область (D) – восемь точек, равномерно распределенных по горизонтальной поверхности ок∧
∧
ружности диаметром 6 км, б – зависимость σ [V ], σ [U ] от числа используемых измерений Ki
В данном пункте представлен принципиальный подход к решению задачи
расчёта ветра с использованием допплеровских измерений скорости ветра, производимых ДМРЛ. Детали технологии оперативного определения поля ветра
связаны с определением оптимальных параметров реализующей способ методики, например: сколько использовать значений K i ; как учитывать трёхмерность задачи; для какого размера области (D ) атмосферы вектор скорости ветра
r
W можно считать постоянным; как решать обратную задачу математически
корректно.
4. Анализ результатов реализации предлагаемого способа
в новом ДМРЛ и некоторые проблемные вопросы
Разработанная на основе предлагаемого способа определения поля ветра
методика реализована в ДМРЛ, разработанном на ОАО «Завод «Энергия» [5].
В качестве иллюстрации на рис. 3, 4 представлены рассчитанные описанным
способом поля скорости ветра на высоте 0,5 и 2 км по результатам допплеровских измерений в 14:30 (UT) 24 марта 2011 г. Область (D ) имела размеры 4×4 км.
72
УЧЕНЫЕ ЗАПИСКИ № 21
В соответствии с результатами аэрологического зондирования атмосферы за
16:00 (UT) ветер высоте 0,5 км – 13 м/с 295°, на высоте 2 км 16 м/с 280°.
Рис. 3. Рассчитанное по результатам допплеровских измерений поле ветра на высоте 0,5 км,
цветом показаны значения допплеровских скоростей гидрометеоров
Рис. 4. Рассчитанное по результатам допплеровских измерений поле ветра на высоте 2 км,
цветом показаны значения допплеровских скоростей гидрометеоров
На рис. 5 представлена иллюстрация расчёта осреднённых по большему
району (20×20 км) значений мгновенных скоростей. Как следует из приведённых иллюстраций, общая ориентация мгновенных значений векторов скорости
ветра совпадает со средним потоком воздуха на рассматриваемых высотах, определённым по результатам аэрологического зондирования. В то же время
мгновенные значения векторов скорости ветра отражают общую циркуляцию
ветра в кучево-дождевых облаках: так, например, наблюдаются по краям облака
затоки внутрь облака.
73
МЕТЕОРОЛОГИЯ
Рис. 5. Осреднённые по району 20×20 км мгновенные значения векторов скорости ветра
на высоте 2 км
5. Выводы и перспективы развития предлагаемого способа
Анализ результатов испытаний в 2010 г. способа диагностики поля ветра на
основе допплеровских измерений ДМРЛ позволяет сделать вывод о том, что
описанный способ работоспособен.
В то же время существует ряд научных и практических проблем, которые
необходимо преодолеть для широкого внедрения описанного способа на практике. Отметим некоторые из них.
Первая – это проблема интерпретации получаемых значений векторов скорости ветра. Так, рассчитываемые с использованием ДМРЛ поля ветра из-за
диагностики мгновенных значений не будут гладкими и малоградиентными, так
как в облаках, а именно с ними связано наличие отражаемости в атмосфере,
проявляется существенная локальная (связанная с каждым из облаков) циркуляция. Поэтому на первых этапах использования данного тематического продукта
ДМРЛ метеорологам будет сложно его интерпретировать в рамках традиционной
схемы интерпретации полей ветра, которые являются осреднёнными и гладкими,
что обусловлено либо способом проведения аэрологических измерений, либо использованием геострофических или градиентных соотношений на основе полей
давления или геопотенциальных высот изобарических поверхностей.
74
УЧЕНЫЕ ЗАПИСКИ № 21
Вторая – это проблема определения оптимальных значений параметров методик диагностики ветра данным способом. Данная проблема обусловлена тем,
что в основе диагностики поля ветра лежит решение некорректной обратной
математической задачи.
Разрешение указанных проблем, а также способов решения многих других
задач, например, определения пределов применимости данного метода и разработки практических приложений дальнейшего использования результатов диагностики поля ветра может составлять предмет дальнейших научных исследований и технических разработок. Например, определение вертикальных скоростей
гидрометеоров, сдвигов скорости ветра, степени турбулентности в атмосфере.
В заключение хочется отметить то, что применение способа оперативной
диагностики поля ветра высокого разрешения на основе измерений, производимым допплеровским метеорологическим радиолокатором, открывает широкие
возможности как в практической, так и в научно-исследовательских областях
гидрометеорологии. Исследовательское направление связано с появлением возможностей изучения циркуляции воздуха в областях мезо-масштаба (облака,
регионы). Другим аспектом исследований может быть обоснование повышения
требований к чувствительности приёмников ДМРЛ для увеличения областей
возможной диагностики поля ветра и использования ДМРЛ как профилировщиков ветра.
Практическое направление связано с возможностью оперативной (быстрой), с требуемой периодичностью, высоким пространственным разрешением и
в нужных областях атмосферы диагностики поля ветра и связанных с ним явлений и процессов в атмосфере. Оперативные данные о циркуляции воздуха могут
в ближайшем будущем использоваться для насыщения региональных гидродинамических прогностических моделей атмосферы с целью повышения качества
разрабатываемых с их использованием прогнозов.
Литература
1. Довиак Р., Зрнич Д. Допплеровские радиолокаторы и метеорологические наблюдения. – Л.:
Гидрометеоиздат, 1988. – 512 с.
2. Метеорологические автоматизированные радиолокационные сети. Институт радарной метеорологии. – СПб.: Гидрометеоиздат, 2002. – 331 с.
3. Забелин Е.С., Уланова, В.Н. Методы корреляционного и регрессионного анализа в агрометеорологии. – Л.: Гидрометеоиздат, 1990.
4. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 3-е, перераб. – М.: Радиофизика, 2005. – 688 с.
5. Гончаров И.В., Девяткин А.М., Жуков В.Ю., Иванец М.О., Кулешов Ю.В., Чернышев С.В., Щукин Г.Г. Малогабаритный допплеровский метеорологический радиолокатор // XXII Всеросс.
научная конф. «Распространение радиоволн», 23–26 мая 2011 г.
75