УДК № 551.501.8 Кононов Михаил Александрович
advertisement

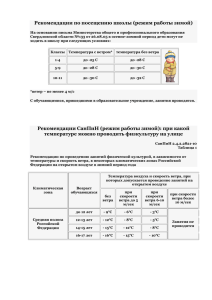
На правах рукописи УДК № 551.501.8 Кононов Михаил Александрович МАЛОГАБАРИТНАЯ ДОПЛЕРОВСКАЯ РЛС, ОБЕСПЕЧИВАЮЩАЯ ВЕТРОВОЕ ЗОНДИРОВАНИЕ ПОГРАНИЧНОГО СЛОЯ АТМОСФЕРЫ Специальность 05.12.14 – Радиолокация и радионавигация АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Москва – 2010 год Работа выполнена на кафедре физики ГОУ ВПО «Московский государственный университет приборостроения и информатики» (МГУПИ). Научный руководитель: доктор физико-математических наук, профессор Стерлядкин В.В. Официальные оппоненты: доктор технических наук, профессор Троицкий В.И. кандидат физико-математических наук, Коломиец С.Ф. Ведущая организация: Нижегородский радиофизический институт (НИРФИ) Защита состоится « 17 » июня 2010г. в 1600 на заседании диссертационного совета Д 223.011.02 при Московском государственном техническом университете гражданской авиации (МГТУ ГА) по адресу: ГСП-3, 125993, г. Москва, А-493, Кронштадский бульвар д. 20. С диссертацией можно ознакомиться в НТБ Московского государственного технического университета гражданской авиации (МГТУ ГА). Отзывы на автореферат диссертации в двух экземплярах, заверенных печатью, просим направлять по вышеуказанному адресу ученому секретарю диссертационного совета. Автореферат разослан « 12 » мая 2010года Ученый секретарь диссертационного совета кандидат технических наук, / Колядов Д.В. 2 I. ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы. Оперативная регистрация ветра в атмосфере является важной задачей метеорологии. Данные о высотном профиле ветра, интенсивности турбулентности, а также регистрация опасных метеоусловий жизненно необходимы для авиации, метеопрогнозов, при предупреждении опасных явлений, например, ураганов, торнадо, штормов и т.д. Традиционно для измерения ветра в атмосфере используют: контактные приборы – анемометры, устанавливаемые на специальные метеорологические вышки или высотные строения; средства радиозондирования; профайлеры – радиолокаторы метрового и других диапазонов длин волн; оптические локаторы – лидары; акустические локаторы – содары и радиоакустические системы. Каждое из указанных средств имеет свои ограничения. Так, например, применение анемометров серьезно ограничивается при обледенении, сильных ветрах или при штиле, а зона измерений анемометров ограничивается высотой вышки, на которой они установлены. Измерение параметров ветра с применением радиозондов требует немалых подготовительных работ, а полный цикл одного измерения протекает в течение несколько часов. При этом в сложных погодных условиях при сильном ветре проблемой является сам процесс выпуска шара в полет. Применение акустических средств ветрового зондирования атмосферы обычно ограничено высотами до 700…900м и затруднено в осадках и при высоком уровне естественных шумов. В условиях тумана и в осадках невозможно применение оптических средств ветрового зондирования. Существующие ветровые радиолокаторы – профайлеры, работающие в дециметровом и метровом диапазоне длин волн, практически не имеют ограничений по погодным условиям, однако они обладают большими размерами, а нижняя граница измерений начинается от 500…900м, что является существенным недостатком в их применении. Для измерения ветра применяются также радиолокаторы с излучением дециметрового и сантиметрового диапазона длин волн, которые обладают меньшими размерами, чем профайлеры, но и у них размер антенн составляет несколько метров. По этой причине их трудно отнести к малогабаритным системам. 3 Таким образом, существующие методы и средства ветрового зондирования либо не являются малогабаритными, либо не позволяют проводить оперативные измерения ветра в широком диапазоне метеоусловий. Следовательно, задача разработки и создания оперативных малогабаритных средств ветрового зондирования атмосферы, работающих в широком диапазоне метеоусловий, является АКТУАЛЬНОЙ. Цель настоящей работы состоит в проведение комплекса теоретических и экспериментальных работ, направленных на создание малогабаритного радиолокационного измерительного комплекса, обеспечивающего дистанционное оперативное измерение ветра в пограничном слое атмосферы в широком диапазоне метеоусловий. Для достижения поставленной цели необходимо было решить следующие задачи: 1. Провести анализ методов и средств измерения параметров ветра в атмо- сфере, существующих на настоящий момент. На основании анализа выделить наиболее перспективное направление, развитие которого позволило бы достигнуть выполнения требования применения измерительной системы в практически любых погодных условиях. 2. На основе анализа различных метеоситуаций и рассеивающих свойств ме- теообъектов сформировать требования, которые предъявляются к параметрам измерительной ветровой системы. В частности, для дистанционных измерительных средств такими параметрами являются рабочая длина волны, энергетический потенциал, требования к антенной системе и другие. Обосновать методику оценки степени всепогодности метеорологической РЛС. 3. Разработать и обосновать методику проведения измерений, алгоритмы сбора, обработки и анализа полученных данных. Особое внимание следовало уделить методике измерения при условии слабых отраженных сигналов, например, в условиях “ясного неба”. 4. Провести экспериментальную проверку предложенных решений, как в ла- бораторных, так и в натурных условиях. 4 Методы исследования. Для решения поставленных задач использовались: классические радиофизические методы определения радиолокационной отражаемости η различных метеорологических образований (аэрозолей, кристаллов, капель, флуктуаций показателя преломления); методы спектрального анализа; методы математического моделирования; методы математической статистики и теории случайных процессов, а также разработанные в МГУПИ методы доплеровской томографии. Научная новизна работы. В процессе проведения исследований получены новые научные результаты как теоретического, так и практического характера: 1. Обоснован энергетический потенциал 8мм РЛС, обеспечивающий измере- ние ветра в пограничном слое атмосферы в различных метеорологических ситуациях. Разработана методика оценки степени всепогодности ветровых измерений для метеорологических РЛС. 2. Разработаны методика измерений и новый алгоритм математического обеспечения, предназначенный для обработки слабых отраженных сигналов в условиях неустойчивого режима регистрации. Методика и алгоритм включают операции сбора радиолокационных сигналов, первичной обработки данных и процедур извлечения метеорологической информации. Методика и алгоритм получили подтверждение, как при компьютерном имитационном моделировании, так и в натурных измерениях. 3. Создано и отработано в натурных условиях специализированное матема- тическое обеспечение, реализующее разработанный алгоритм. Практическая значимость работы заключается: 1. В создании алгоритма радиолокационного восстановления ветра в режиме слабых метеорологических сигналов, который может быть применен для импульсных и непрерывных РЛС различных типов. В методике оценки степени всепогодности ветровых измерений для метеорологических РЛС. 2. В создании рабочего макета 8-ми миллиметровой малогабаритной станции ветрового зондирования атмосферы, обеспечивающей высокую оперативность и возможность работы в круглосуточном и автоматическом режиме. Данный макет РЛС является базовым для серийного производства. 5 Реализация результатов работы. Результаты расчета и обоснования энергетического потенциала и облика 8-ми миллиметровой импульсной РЛС использовались 3-м ЦНИИ МО, г. Москва и ЦКБА, г. Тула при создании макета 8-ми миллиметровой малогабаритной станции ветрового зондирования атмосферы в рамках выполнения НИР “Механизм-РВО” и ОКР “Механизм-М”. Разработанная методика измерений ветра, а также алгоритмы обработки радиолокационных сигналов нашли применение при выполнении ОКР “Механизм” в ЦКБА, г. Тула; 3-м ЦНИИ МО, г. Москва и ФГУП “Радиозавод”, г. Москва. Результаты работы докладывались и обсуждались на всероссийских и международных конференциях: 1. Конференция ERAD (Delft, Nederland, 2002) 2. XXI, XXIII Всероссийских симпозиумах “Радиолокационное исследование природных сред” (г. Санкт-Петербург, 2003, 2007); 3. XV-XVIII Международных научно-технических семинарах “Современные технологии в задачах управления, автоматики и обработки информации” (г. Алушта, Украина, 2006-2009); 4. Научной конференции Московского Государственного Университета При- боростроения и Информатики (г. Москва, 2008); 5. XI Международная научно-практическая конференция “Фундаментальные и прикладные проблемы приборостроения, информатики и экономики” (г. Сочи, 2008) 6. IV Всероссийская научная школа и конференция “Радиофизические мето- ды в дистанционном зондировании сред” (г. Муром, 2009) Результаты работы неоднократно докладывались и обсуждались на научных семинарах МГУПИ на кафедрах “Физика”, “Точные приборы и измерительные системы”, “Информационные оптико-электронные системы”. Публикации. Основные результаты работы опубликованы в шестнадцати статьях, трех тезисах докладов на научных конференциях и семинарах, изложены в трех научно-технических отчетах по научно-исследовательским и опытноконструкторским работам [1-10]. 6 На защиту выносятся: 1. Теоретически обоснованные требования к энергетическому потенциалу метеорологической РЛС, которые обеспечивают регистрацию ветра в нижнем слое атмосферы (до 1000м) в 96% метеоситуаций. 2. Методика проведения измерений ветра, включая измерения в условиях слабых радиолокационных сигналов. 3. Алгоритм, отражающий операции регистрации радиолокационных сигналов, первичной обработки, квадратурной обработки, отбраковки ошибок, получения профиля ветра, в том числе и в условиях слабых сигналов. II. СОДЕРЖАНИЕ ДИССЕРТАЦИИ Структура и объем диссертации. Диссертация состоит из введения, пяти глав, заключения, списка литературы, содержащего 83 наименований. Работа изложена на 178 страницах, включает 6 таблиц и 64 иллюстрации. Содержание работы. Во введении отражена актуальность работы. Осуществляется постановка задач и приводится характеристика работы. В первой главе представлен обзор методов и средств измерения параметров ветра в атмосфере. Анализ отражает достоинства и недостатки, присущие различным методам и группам измерителей ветра. В классификации выделены две группы – контактные и бесконтактные методы и средства измерения ветра. Первая группа представлена зондовыми средствами и анемометрами с различными принципами действия. Вторая группа отражает применение волн различной природы для измерения параметров ветра. Выделяются акустические, оптические, радиоакустические, акустооптические и радиолокационные методы и средства измерения параметров ветра. На основе анализа достоинств и недостатков всего многообразия средств измерения ветра как наиболее перспективные отмечены радиолокационные средства. Обосновано решение об использовании радиолокационного метода измерений, а в основу создаваемого измерительного комплекса заложен импульсно-когерентный радиолокатор (ИКР). Во вводной части второй главы настоящей работы проводится классификация метеообразований, которые формируют радиоэхо. Отмечено, что при нали7 чии осадков отражателями являются капли или снежинки, в облаках и туманах рассеяние происходит на неоднородностях концентрации или на наиболее крупных фракциях частиц аэрозоля. В условиях ясного неба радиолокационное отражение происходит от флуктуаций плотности показателя преломления воздуха. В разделе 2.1 отмечено, что большинство метеообразований представляют собой объемную множественную цель, которую удобно характеризовать не эквивалентным поперечником рассеяния (ЭПР), а величиной η – удельной радиолокационной отражаемостью – суммарной ЭПР рассеивателей, располагающихся в единице объема. В данном разделе рассмотрены радиолокационные отражающие свойства метеообъекта, который в метеорологии принято называть “ясным небом”. Для описания флуктуаций показателя преломления воздуха использована теория В.И. Татарского. В этой теории неоднородности показателя преломления связаны с турбулентным перемешиванием различных слоев воздуха. Для описания интенсивности турбулентности вводится параметр Cn2 [м–2/3]. В случае однородной изотропной турбулентности связь между удельной радиолокационной отражаемостью η и Cn2 описывается соотношением: 2 η1 = 0.38 ⋅ C n ⋅ λ − 1 3 , [м ], , -1 (1) где λ – длина волны, на которой ведется зондирование, Cn2 – параметр, характеризующий интенсивность турбулентности. Из данного выражения следует, что зависимость η1(λ) незначительно растет с уменьшением длины волны λ. В разделе также приводятся экспериментальные данные по величинам Cn2, полученные на различных высотах в различные времена года и суток. Для слабой турбулентности значения Cn2 имеют значения от 10–17[м–2/3], а интенсивная турбулентность характеризуется значениями Cn2 до 10–12[м–2/3]. Соответствующие значения удельной радиолокационной отражаемости η меняются от 2⋅10–17 до 2⋅10–12 [м–1]. В разделе 2.2 приводятся значения удельной радиолокационной отражаемости осадков, облаков и аэрозолей. В большинстве случаев размеры частиц в таких метеообъектах много меньше длины волны λ, поэтому рассеяние носит дипольный характер и описывается механизмом Рэлея (рэлеевское рассеяние). В этом случае 8 ЭПР отдельной частицы σ~D6/λ4, где D – характерный размер отражателя (диаметр капли). Отмечено, что в предположении однократного рассеяния удельная величина радиолокационной отражаемости складывается некогерентно и может быть представлена как сумма отражаемостей всех рассеивателей в единице объема. По этой причине удельная радиолокационная отражаемость осадков и аэрозолей быстро растет с уменьшением длины волны λ, как λ−4. Отсюда следует, что для регистрации облаков и осадков привлекательным является использование коротковолнового диапазона длин волн (мм и см). Проведенный анализ показывает, что облака всех типов в см и мм диапазонах длин волн дают сигналы, превышающие уровни отражений от турбулентности, поскольку η для аэрозолей резко возрастает с уменьшением λ. В данном разделе делается вывод о целесообразности использования максимально коротких длин волн, в частности был выбран миллиметровый диапазон длин волн. Вопросы “прозрачности” атмосферы рассматриваются в разделе 2.3. Приводятся графики поглощения стандартной атмосферы для различных длин волн, из которых следует вывод о привлекательности использования 8мм диапазона длин волн. Дополнительным аргументом является уровень технологического освоения данного диапазона, а также возможность создания малогабаритных антенн, обладающих узкой диаграммой направленности с малым уровнем “боковых лепестков”, что особо важно при регистрации слабых отраженных сигналов. Расчет метеорологического потенциала радиолокатора, обеспечивающего надежное измерение ветра в нижнем 1000м слое атмосферы, проведен в разделе 2.4. В разделе приводится основное уравнение метеорологической радиолокации. Проводится оценка мощности минимально обнаружимого сигнала Pmin с учетом шумовой температуры системы Ts, ширины полосы анализа ∆f и некогерентного накопления спектров, приведенного ко времени измерения 1 секунда. Учет всех факторов, влияющих на мощность шумов, позволил оценить уровень минимально обнаружимого сигнала величиной Pmin=4⋅10−20Вт. В предположении, что рассеиватели полностью заполняют зондируемый объем, пренебрегая ослаблением по трассе, при удельной отражаемости ηmin= 9 =6⋅10–17[м–1] и дальности L=1000м для регистрации отраженного сигнала на уровне Pmin необходимо обеспечить метеорологический потенциал П=0.67⋅103[Вт⋅м3]. На основе уравнения радиометеорологии были оценены параметры радиолокатора, обеспечивающие требуемый потенциал: средняя излучаемая мощность Pt около 25Вт, длительность импульса τимп=0.5мкс, пространственная протяженность импульса h=75м, площадь антенны РЛС должна составлять 6.5м2, что соответствует диаметру антенны 2.9м. Реальные размеры антенны при проектировании малогабаритной РЛС ограничены диаметром 1м. Следовательно, потенциал, реализуемый РЛС, будет почти в 10 раз меньше, чем необходимо для регистрации сигнала в любых погодных условиях. Реализуемый потенциал соответствует регистрации удельной радиолокационной отражаемости на уровне η=6⋅10−16[м–1] , что для случая турбулентности соответствует Cn2=3⋅10−16[м–2/3]. На рисунке 1 представлены данные о среднемесячных отражающих свойствах безоблачной атмосферы на разных высотах, полученные в течение многолетних измерений [Sekelsky S.M., ... RCS-IOR millimeter-wave radar calibration and data intercomparison. Proc. of 5ARM science team meeting, San Diego, California, 1995]. Рисунок 1 – Сезонное изменение величины Cn2 по месяцам на различных высотах: ◯ – 160м; × – 480м; ☐ – 950м; △ – 1450м Из рисунка 1 видно, что уровень обнаружения, соответствующий значению Cn2=3⋅10−16[м–2/3], не обеспечивает получение сигнала в зимние месяцы, т.е. для проектируемой РЛС получаем “слепой” период с ноября по февраль. Однако даже 10 в этот период не все так плохо, так как далеко не все дни являются полностью безоблачными, а любая облачность будет регистрироваться нашим радиолокатором. Регистрация ветра контактным анемометром в нижнем 5 метровом слое атмосферы и в слое облачности позволяет с хорошей точностью восстановить весь профиль параметров ветра на основе статистических априорных данных. Это замечание тем более справедливо, поскольку относится к метеоситуациям со слабой турбулентностью и слабым ветром (самая стабильная ситуация). Следовательно, только зимние дни с безоблачной атмосферой и слабым ветром будут понастоящему являться “слепыми” для проектируемого ИКР. По данным ТСХА (Тимирязевская сельскохозяйственная академия) для Москвы и центральной европейской части России на указанный “слепой” период приходится 14 ясных дней, т.е. 4 % всей длительности года. Остальной же период (96%) можно считать пригодным для эксплуатации системы за счет присутствия облаков, осадков и аэрозольных образований в нижней приземной атмосфере. Т.е. система измерения ветра на базе РЛС, обладающей указанными в настоящей работе параметрами, должна обеспечивать регистрацию сигналов в 96% метеоситуаций в году. В последнем разделе главы предложена функциональная схема ИКР. Для реализации потенциала и высотного разрешения 30м требуется зондирование атмосферы импульсами длительностью τимп=0.5мкс с частотой повторения fповт=25кГц. В работе предлагается квадратурная схема регистрации знака скорости, которая частично реализуется аппаратно, а частично программно при обработке сигналов. В конце главы на основе анализа физических принципов формирования радиолокационного сигнала, отраженного от различных метеообразований, обоснованы основные параметры метеорологической РЛС ветрового зондирования, обеспечивающей надежное измерение ветра до высот 1000м в широком диапазоне метеоусловий (96% всех случаев): - длина волны зондирующего излучения λ=8мм; - метеорологический потенциал радиолокатора П=0.67⋅103[Вт⋅м3]; - диаметр антенны – 1м; - длительность импульса τимп=0.5мкс; частота повторения импульсов fповт=25кГц; 11 - средняя излучаемая мощность Pt=25Вт; диаметр антенны D=1м; - квадратурная система определения знака скорости движения рассеивателей; - уровень “боковых лепестков” –30дБ на излучение и –60дБ на излучение/прием; - частота дискретизации АЦП 2.5МГц на каждый канал; - динамический диапазон АЦП ≈ 70дБ. Третья глава настоящей диссертации отражает методику измерений ветра, алгоритмы обработки полученных данных и процедуру восстановления высотного профиля ветра. Во вводной части третьей главы рассмотрен принцип измерения ветра с применением импульсно-когерентного радиолокатора (ИКР). Отмечено, что отражатели, увлекаемые ветром, формируют радиоэхо, которое принимается той же антенной с некоторой задержкой τзад относительно момента излучения импульса. Измерение и оцифровка таких сигналов по мере распространения импульса, накопление серии импульсов в течение нескольких секунд позволяет получить матрицу данных, содержащую всю информацию о профиле ветра вдоль луча. Для каждой дальности по первым моментам доплеровских спектров можно определить профиль проекций скорости рассеивателей на направление зондирования. Совместная обработка данных, полученных с нескольких направлений зондирования, позволяет восстановить высотные профили скорости ветра V(H) и направления ветра α(H) с высоким пространственным разрешением. В разделе 3.1 подробно обсуждены различные модели формирования радиоэхо. Предполагается, что радиоэхо формируется от большого числа рассеивателей, которые расположены в пространстве случайным образом. С другой стороны рассеивателей не слишком много, так что при формировании сигнала достаточно рассматривать однократное рассеивание на частицах. Метод “круговых диаграмм” и моделирование прямой задачи описаны в разделе 3.2. Метод опирается на методику VAD (velocity azimuth display), предложенную Атласом Д., в которой проводится непрерывное круговое азимутальное сканирование пространства. Основой предложенной методики является проведение азимутального “разреза” пространства, при фиксированном угле места β и пе- 12 ременном азимуте зондирования α, который изменяется по кругу с некоторым шагом ∆α. Предполагается, что поле ветра можно считать слоисто-однородным и стационарным в течение всего времени измерений. При усреднении поля ветра на площади в несколько км2 средний масштаб вертикальных движений составляет не более несколько см/сек. Однако орография земной поверхности влияет на поле ветра в приземном слое и вызывает нарушение его слоистости. Поэтому при измерении ветра необходимо проводить осреднение данных не только во времени, но и в пространстве. Такую возможность предлагает метод “круговых диаграмм”. При рассмотрении метода “круговых диаграмм” использовалось соотношение, связывающее проекции скорости движения рассеивателей на направление зондирования с вектором ветра, а также со скоростью гравитационного падения рассеивателей и направлением луча: V(Vв, αв, α, β,Vг, ∆V)=Vв⋅cos(α−αв)⋅cosβ+Vг⋅sinβ+∆V , (2) где Vв – модуль скорость ветра; αв – направление ветра; H – высота зондирования; α – азимут зондирования; β – местный угол зондирования; Vг – модуль скорости гравитационного падения рассеивателей; ∆V – слагаемое, учитывающее пульсации ветра, турбулентность и т.д. На основе выражения (2) проводилось моделирование прямой задачи – получение круговых диаграмм при различных параметрах ветра, скорости гравитационного падения и турбулентности. В разделе 3.3 предложена и обоснована методика проведения измерений ветра по 12 направлениям с шагом по азимуту ∆α=30°. Ограничения по количеству направлений зондирования, с одной стороны, обусловлены ограниченным временем полного цикла измерения, а, с другой стороны, требованием к надежности и точности регистрации ветра. Местный угол зондирования β выбирается из следующих факторов. С уменьшением β уменьшается вклад вертикальных движений, что повышает точность измерения скорости ветра. С другой стороны, при этом снижается высота зондирования. Оценки показали, что оптимальным диапазоном углов β является β=25°…30°. 13 В разделе 3.4 диссертации рассмотрен алгоритм регистрации данных, процедура записи и обработки радиолокационных данных. Отмечено, что быстродействующий АЦП должен регистрировать “мгновенную” фазу сигнала для 50-ти различных дальностей, отстоящих друг от друга на расстоянии ∆R=c/(2⋅fАЦП). При частоте АЦП fАЦП=1.25МГц ∆R составляет 120м дальности или, при β=30°, ∆H=60м по высоте. Полная дальность зондирования составляет 6000м, а частота повторения импульсов fповт=25кГц. Регистрация последовательности импульсов на каждой дальности позволяет сформировать доплеровский сигнал в виде двумерной матрицы (высота×время). Описаны процедуры получения спектров с помощью быстрого преобразования Фурье (БПФ), методика цифрового поворота фазы одного из каналов на π/2, процедуры сглаживания, накопления и нормировки сигналов по мощности и спектральная нормировка по шумам. На рисунке 2 представлены результаты обработки спектров для одного из каналов. а) б) в) Рисунок 2 –Результаты спектральной обработки данных натурных измерений а) исходный спектр; б) сглаженный и усредненный спектр; в) результат нормировки по шумам Из рисунка 2в видно, что спектральная нормировка по шумам позволяет регистрировать доплеровскую частоту как глобальный экстремум спектра мощности. Степень превышения максимума над шумами учитывается в виде коэффициента 14 достоверности результата измерения. В результате обработки всех данных матрицы получается высотный профиль проекции скоростей Vξ(Hi), где ξ=1…12, i=1…50, для каждого из 12 направлений зондирования. На следующем этапе для каждой i-ой высоты (i=1…50) формируется невязка: [ ] Η (Vв , α в ) = ∑ Vξ − Vв ⋅ cos (α ξ − α в ) ⋅ cos (β ) + Vг ⋅ sin (β ) ⋅ Dv ξ N 2 ξ =1 (3) где N – число направлений зондирования (при полном обороте N=12); Vв, αв – искомые параметры ветра, соответствующие минимуму невязки; αξ, Vξ – азимут зондирования и соответствующая проекция скорости ветра; Dvξ – показатель достоверности измерения на данном направлении зондирования; Vг – скорость гравитационного падения, определяемая на основе анализа спектров, полученных при зондировании в противоположные направлениях. Минимизация невязки по параметрам Vв и αв методом “градиентного спуска” позволяет получить значения модуля скорости ветра Vв и его азимут αв для каждой высоты Hi. Так восстанавливается высотный профиль ветра в виде функций Vв(H) и αв(H). В разделе 3.5 проводилось математическое моделирование устойчивости решения обратной задачи минимизации невязки в различных условиях: при ограниченном количестве направлений зондирования, при различных уровнях ошибки измерений, обусловленных турбулентностью и другими факторами. Моделирование показало устойчивость решений даже для невязки, сформированной из трех направлений зондирования, и турбулентности на уровне ∆V=2м/с. При этом среднеквадратическое отклонение восстановленных параметров ветра от модельных составило: по скорости σV=0.4м/с, а по азимуту σα=6°. В разделе 3.6 проведена оценка погрешностей радиолокационных измерений параметров ветра методом “круговых диаграмм”. Учтены нестабильность параметров аппаратуры, поля отражателей и самого поля ветра, турбулентность, погрешности позиционирования радиолокатора, ошибки оцифровки данных и их обработки. С учетом всех факторов получено, что погрешность измерения высоты составляет величину порядка ∆H=23м, погрешность измерения модуля скорости ветра ∆V=1.8м/с, погрешность измерения азимутального направления ветра не 15 хуже ∆α=17.2°. Показано, что проведенные оценки погрешностей являются оценками сверху, которые обеспечиваются при получении достоверных измерений всего по двум направлением зондирования. В случае обеспечения шести достоверных измерений из двенадцати, оценки погрешностей снижаются до величин: ∆H=9.5м, ∆V=0.74м/с и ∆α=7.0°. При полном наборе из двенадцати достоверных измерений погрешности снижаются до величин: ∆H=6.7м, ∆V=0.5м/с и ∆α=4.9°. В конце главы 3 кратко изложены основные результаты и выводы по методике измерений, алгоритму обработки данных и погрешностям измерений. В четвертой главе настоящей работы отражены результаты лабораторной апробации разработанных методик и алгоритмов. В период 2001-2002гг. на базе ЦАО (г. Долгопрудный) был проведен анализ возможностей серийно выпускаемого импульсного когерентного радиолокатора 1РЛ133 и проведена его модернизация с целью использования для регулярных ветровых измерений. Техническая модернизация отражена в разделе 4.1. Модернизация включала создание и калибровку измерительного канала дальности. Дополнительно был создан интерфейс сопряжения радиолокатора с ПЭВМ, в который вошли фильтры, АЦП и программное обеспечение. Проведенная модернизация позволила использовать макет ветровой РЛС для экспериментальных измерений поля ветра в осадках любого рода и различной интенсивности. В разделе 4.2 описана последовательность настройки оборудования и рассмотрены все этапы отработки методики измерения и алгоритмов обработки и восстановления высотного профиля. Алгоритмы реализованы в специальном программном обеспечении, рабочие экраны которого описаны в разделе 4.3 данной главы. Интерфейсы программного обеспечения макета отражены на рисунках 3 и 4. Программное обеспечение позволяло в реальном времени записывать в оперативную память доплеровские данные и данные о дальности, а экранный интерфейс (см. рисунок 3) контролировал форму сигнала и текущий спектр на выбранной дальности. Кроме того, программа позволяла обрабатывать накопленные файлы данных в любой последовательности после завершения измерений. Окончательный вид данных представлен на рисунке 4 в виде высотных профилей модуля скорости ветра V(H) и направления ветра α(H). Дополнительно для визуального кон16 троля на выбранной высоте прописывался азимутальный разрез и восстановленный вектор скорости. Особенности алгоритмов таковы, что их легко использовать в системах, работающих на любой другой длине волны. Таким образом, в главе 4 отражены результаты проверки принципов доплеровских измерений скорости ветра, методик измерений и алгоритмов на базе специального макета, созданном на базе ИКР 1РЛ133. На созданном макете в течение двух лет были отработаны как методика проведения измерений методом “круговых диаграмм”, так и основные приемы, и алгоритм обработки измерительных данных, описанные в главе 3. Рисунок 3 – Интерфейс настроек и подключения файлов данных Данный этап работы обеспечил получение неоценимого опыта ветровых измерений с помощью импульсных РЛС. Позволил отработать методику, которая использовалась нами при проектировании и создании высокопотенциальной ветровой РЛС, предназначенной для работы в широком диапазоне метеоусловий. 17 Рисунок 4 – Интерфейс результатов измерений Пятая глава настоящей диссертации отражает результаты натурных испытаний макета 8мм импульсно-когерентного радиолокатора, созданного в рамках НИОКР “Механизм” совместно с ЦКБА (г. Тула). При реализации данного макета были максимально учтены требования к аппаратной и программной частям измерительного комплекса, отраженные в главах 2 и 3, соответственно. Натурные сравнительные испытания проводились на полигоне ФГУП “Метеоприбор” в г. Обнинск. При этом проводилось сравнение результатов радиолокационных измерений с данными анемометров, расположенных на разных ярусах высотной вышки. В рамках данного эксперимента была поставлена задача – осуществить испытания созданного макета 8мм ветровой ИКС и определить погрешность радиолокационного измерения ветра при различных условиях. Сравнения проводились для разных ярусов метеовышки в диапазоне высот до 300м (определяется высотой вышки). При проведении данного эксперимента в натурных условиях были проверены как методика измерений, так и математическое обеспечение, описанные в главе 3 настоящей диссертации. На рисунке 5 представлены результаты сравнения измеренных значений скорости и направления ветра, полученные с помощью 18 вышки и ИКС в течение 8 сентября 2004г на отдельно взятых высотах (позициях анемометров на метеовышке). Рисунок 5 – Результаты сравнительных испытаний макета ИКР и 300м метеовышки в г. Обнинск в 2004г. Сравнение результатов (см. рисунок 5) показало, что среднеквадратическое отклонение результатов определения модуля скорости разными средствами составило 0.973м/с, а направления ветра, соответственно, 2°. Полученные различия находятся в пределах погрешности сравниваемых методов, что подтверждает надежность и точность измерения ветра в атмосфере радиолокационными средствами. По результатам всех натурных экспериментов были сделаны выводы, главным из которых является то, что доказана возможность создания малогабаритной высокопотенциальной системы измерения ветра в нижнем слое атмосферы. Экспериментально подтверждены как правильность выбора длины волны радиолокатора, так и расчеты его энергетического потенциала, подтверждены методика измерений и обработки измерительной информации. III. В заключении диссертации приводятся основные результаты работы и выводы 1) В результате анализа существующих методов и средств измерения параметров ветра в атмосфере в качестве основы малогабаритного измерителя ветра был обоснован выбор импульсно-когерентной РЛС миллиметрового диапазона длин волн. 2) На основе анализа различных метеоситуаций и рассевающих свойств метеообъектов обоснована длина волны РЛС, энергетический потенциал метеоло19 катора, требования к антенной системе и другие требования к облику импульсной РЛС, обеспечивающей измерение ветра в пограничном слое атмосферы практически в любых погодных условиях (более 90% возможных метеоситуаций). 3) Разработана и обоснована методика проведения измерений ветра с помощью импульсных РЛС, в том числе в условиях слабых сигналов и неустойчивой регистрации отраженных сигналов. Разработан новый алгоритм математического обеспечения РЛС всепогодного ветрового зондирования атмосферы, отработанный как в режиме компьютерного моделирования, так и в натурных условиях, создано математическое обеспечение, реализующее разработанный алгоритм. 4) Создан макет 18мм импульсно-когерентного радиолокатора, на котором были экспериментально отработаны как методика проведения измерений методом “круговых диаграмм”, так и основные приемы, и алгоритмы обработки принятых сигналов. Опыт двухлетней эксплуатации макета в натурных условиях лег в основу предложений МГУПИ при разработке технического задания и создания макета всепогодной малогабаритной доплеровской 8мм РЛС. 5) На макете 8мм РЛС, созданном в ЦКБА, г. Тула, проведены совместные натурные измерения и получены экспериментальные данные, которые подтвердили возможность проведения ветровых измерений в широком диапазоне метеоусловий. Экспериментально подтверждена эффективность разработанных методик измерений и обработки измерительной информации. 6) Показано, что повышение потенциала станции, например, за счет увеличение размеров антенны до 3м, а также уменьшение мертвой зоны, позволят повысить информационные возможности комплекса и довести обеспеченность измерений до 98% метеослучаев. Таким образом, достигается цель данной диссертационной работы – обос- нование и создание малогабаритной системы ветрового зондирования атмосферы работающей в широком диапазоне метеоусловий. 20 IV. ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ 1) Кононов М.А. Алгоритм и методика измерения ветра в пограничном слое атмосферы импульсно-когерентной РЛС. / Научный вестник МГТУ ГА №117 / серия “Радиофизика и радиотехника”. – М.: МГТУ ГА. 2007г. 2) Кононов М.А., Стерлядкин В.В. Расчет потенциала и оценка возможностей ветровой метеорологической РЛС мм диапазона длин волн. / Научный вестник МГТУ ГА №158 / серия “Радиофизика и радиотехника”. – М.: МГТУ ГА. 2010г. 3) Кононов М.А., Петухов Д.Б., Стерлядкин В.В. Выделение тонкой структуры отраженного радиолокационного сигнала, пригодного распознавания движущихся объектов. / Научный вестник МГТУ ГА №158 / серия “Радиофизика и радиотехника”. – М.: МГТУ ГА. 2010г. 4) Kononov M.A., Sterlyadkin V.V., Lobanov D.V. Testing of the Doppler tomography methods by radar sounding of wind fields. / ERAD 2002, Delft, Nederland, 2002г. 5) Кононов М.А., Лобанов Д.В., Стерлядкин В.В., Чистовский К.Г. Моделирование метода доплеровской томографии на основе данных импульснокогерентной РЛС. / Труды XX и XXI Всероссийских симпозиумов “Радиолокационное исследование природных сред”, выпуск 3. – СПб.: ВКА им. Можайского, 2003г. 6) Кононов М.А., Прудывус А.В., Стерлядкин В.В. О возможности создания малогабаритного всепогодного измерителя ветра. / Труды XXV Всероссийского симпозиума “Радиолокационное исследование природных сред”. – СПб.: 2007г. 7) Кононов М.А., Стерлядкин В.В. Разработка алгоритма работы и математического обеспечения малогабаритной ветровой РЛС. / Труды XXV Всероссийского симпозиума “Радиолокационное исследование природных сред”. – СПб.: 2007г. 8) Кононов М.А., Стерлядкин В.В. Оценка эффективности расчетного метеорологического потенциала ветровой доплеровской РЛС / Труды IV Всероссийская научная школа и конференция “Радиофизические методы в дистанционном зондировании сред”, электронный сборник (на CD-ROM). – Муром: МИ ВлГУ, 2009г. 21 9) Евлашкин Р.А., Кононов М.А., Стерлядкин В.В., Чистовский К.Г., Цопов А.А. Разработка математического обеспечения для РЛС ветрового зондирования атмосферы. / Труды XV Международного научно-технического семинара “Современные технологии в задачах управления, автоматики и обработки информации”, тез. доклада, Алушта: 2006г. 10)Кононов М.А., Самохина М.В., Стерлядкин В.В. Оценка эффективности расчетного потенциала ветровой доплеровской РЛС. / Труды XVIII Международного научно-технического семинара “Современные технологии в задачах управления, автоматики и обработки информации”, тез. доклада, Алушта: 2009г. Соискатель: / Кононов М.А. 22 Кононов Михаил Александрович Малогабаритная доплеровская РЛС, обеспечивающая ветровое зондирование пограничного слоя атмосферы Подписано в печать 5 мая 2010 формат 60×84 усл. печ. л. 1.0 Тираж 100 экз. Заказ № 7 Мини-типография “Копировальный Ризо-центр” 141300, Московская область, г. Сергиев-Посад, ул. Вознесенская, д.55 23