Алгоритмы идентификации и компенсации информационных
advertisement

На правах рукописи
ЖИДКОВА НАТАЛЬЯ ВАЛЕРЬЕВНА
АЛГОРИТМЫ ИДЕНТИФИКАЦИИ И КОМПЕНСАЦИИ
ИНФОРМАЦИОННЫХ НАРУШЕНИЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ
05.13.01 – Системный анализ, управление и обработка информации
(по техническим наукам)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Н. Новгород – 2007 г.
Работа выполнена в Арзамасском Политехническом Институте (филиале)
Нижегородского Государственного Технического Университета.
Научный руководитель:
Доктор физико-математических наук,
профессор Пакшин П.В.
Официальные оппоненты:
Доктор технических наук, профессор
Федосенко Ю.С.
Кандидат технических наук, доцент
Волков Н.В.
Ведущая организация:
ОАО АНПП «ТЕМП–АВИА» г. Арзамас
Защита состоится « 29 » марта 2007 г. в 1500 часов на заседании диссертационного совета Д 212.165.05 Нижегородского Государственного Технического
Университета по адресу: 603600, Нижний Новгород, ул. Минина, 24, НГТУ, корпус 1 , аудитория 1258 .
С диссертацией можно ознакомиться в научно-технической библиотеке Нижегородского Государственного Технического Университета.
Автореферат разослан « 12 » февраля 2007 г.
Ученый секретарь
диссертационного совета
к.т.н., Иванов А.П.
2
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность. На различных этапах развития науки и техники задачи обнаружения и компенсации информационных нарушений в информационных измерительных системах (ИИС) решались многими авторами. В современных условиях
многие важные вопросы в этой области остаются нерешенными, в частности, это
касается алгоритмов обнаружения, идентификации и компенсации постепенных
отказов первичных измерителей на основе принципов адаптации. В то же время
развитие микропроцессорной вычислительной техники позволяет реализовать новые, достаточно сложные и эффективные алгоритмы в реальном масштабе времени.
Цель работы. Основная цель диссертации состоит в повышении информационной надежности ИИС на основе алгоритмов обнаружения и устранения информационных нарушений в изменяющейся помеховой обстановке.
Использование принципов самоорганизации, оптимизации, принятия решений с целью устранения возникающих информационных нарушений на основе
системного подхода объединяющего возможности аппаратных и алгоритмических
средств позволяет получить повышение точности и надежности ИИС.
Системный подход использует измерительную информацию для целей
идентификации и управления состоянием ИИС, во-первых, в реальном времени и,
во-вторых, записанных данных после выполнения задачи объектом для уточнения
и более детального исследования состояния ИИС. Системный подход обеспечивает двухконтурный цикл идентификации и компенсации информационных нарушений ИИС.
Для достижения поставленной цели в диссертационной работе решались
задачи:
- исследование моделей характерных информационных нарушений ИИС;
- разработка эффективных алгоритмов идентификации и компенсации постепенных информационных нарушений ИИС;
- разработка принципов построения цикла идентификации и компенсации
информационных нарушений ИИС с использованием оптимизации вероятности
ошибочных решений при обнаружении информационных нарушений;
- проведение экспериментальных исследований и практическое подтверждение полученных разработок.
Научная новизна. Научная новизна диссертационной работы заключается в
следующем:
1. Предложен новый алгоритм обработки информации для контроля информационных нарушений ИИС, отличающийся возможностью обнаружения, идентификации и компенсации постепенных нарушений при минимуме ошибочных
решений;
2. Разработаны новые принципы построения алгоритмов оптимизации достоверности контроля при обоснованном минимуме вероятностей ошибок контроля, отличающиеся тем, что рассчитываются многофакторные таблицы вероятностей ошибочных решений;
3. Предложено применение двухконтурного цикла идентификации и компенсации информационных нарушений ИИС, отличающееся системным подходом
на основе циклического алгоритма: обработка в реальном времени - постобработка - обработка в реальном времени.
3
Практическая ценность. Практическая ценность диссертационной работы
подтверждена внедрением предложенных алгоритмов для блока определения ориентации в интегрированной навигационной системе и в системе управления испытательной температурной установки.
Также результаты работы могут быть использованы для измерительных информационных систем, в которых актуальным является высокодостоверное обнаружение и гарантированная компенсация постепенных отказов измерительных
преобразователей ИИС. Методика экспериментальных исследований эффективности алгоритмов ИИС на основе пакета Matlab Simulink полезна для инженерного
применения при проектировании ИИС.
На защиту выносится, полученный лично автором, алгоритм идентификации и адаптивной настройки ИИС, компенсирующий постепенные информационные нарушения.
Внедрение работы. Основные результаты диссертационной работы внедрены:
- ОАО АНПП «ТЕМП - АВИА» в составе специального программного обеспечения вычислителя блока определения ориентации комплекса наземной отработки интегрированной навигационной системы;
- предприятием ООО «ЭЛЬСТЕР Газэлектроника» в программное обеспечение ИИС контура управления технологическим процессом испытательной температурной установки;
- в учебный процесс в Арзамасском политехническом институте филиале
НГТУ на кафедре "Прикладная математика" по дисциплине "Теория навигационных систем" специальности 010501.65 "Прикладная математика и информатика".
Апробация работы. Основные положения и результаты диссертации опубликованы в статье журнала “Радиотехника” №6 2004, межвузовских сборниках
“Прогрессивные технологии в машино- и приборостроении” Н.Новгород в 19992004гг.; доложены автором и обсуждены на 12 и 13-й Международных конференциях “Saint Peterburg International conference on integrated navigation systems”,
Санкт-Петербург, ЦНИИ «Электроприбор», май 2005, 2006 гг., 7-й конференции
«Навигация и управление движением», Санкт-Петербург, ЦНИИ «Электроприбор», март 2005г.; 7-й ВНТК “Информационные технологии в промышленности и
учебном процессе - 2004», Москва-Арзамас, сентябрь 2004г.; 10-й нижегородской
сессии молодых ученых «Технические науки», Дзержинск, март 2005г, а также в
ряде Всероссийских НТК, проводимых в НГТУ.
Структура и объем работы. Диссертация состоит из введения, пяти глав,
выводов, списка литературы и приложения. Работа изложена на 148 страницах
машинописного текста, содержит 40 рисунков и 110 наименований литературных
источников.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность темы, определяется цель, и формулируются задачи исследования, указываются научная новизна и практическая
ценность результатов, представляются вопросы, выносимые на защиту.
В первой главе проводится обзор и анализ современных алгоритмов отказоустойчивого получения и обработки измерений в ИИС, в том числе навигационных ИИС.
Вопросы идентификации и компенсации информационных нарушений в
измерительных информационных системах тесно связаны с теорией самооргани-
4
зующегося управления, развитой Саридисом Дж. и в исследованиях русских ученых - Цыпкина Я.З., Фельдбаума А.А.
Развитие методов идентификации параметров стохастических систем в
реальном времени проведено группой ученых военно-воздушной инженерной академии им. Н.Е.Жуковского, Раменского приборостроительного конструкторского бюро: Чернодаровым А.В., Платоновым А.Ю., Будкиным
В.Л., Голиковым В.П. и др.
Исследования, проводимые в Санкт-Петербурге Дмитриевым С.П.,
Колесовым Н.В., Осиповым А.В., Степановым О.А., Кошаевым Д.А., Амосовым О.С. позволяют сформулировать локальные требования к точности
оценок и достоверности контроля.
При построении отказоустойчивых алгоритмов ИИС используется многофакторный эксперимент, используемый для преодоления трудностей
представления статистического материала в аппроксимирущих алгоритмах.
В области отказоустойчивого получения информации в измерительных
системах в настоящее время наблюдается проведение интенсивных исследований
и, как следствие появление большого количества новых работ по этой тематике.
На основе проведенного анализа современного состояния отказоустойчивых алгоритмов ИИС важным представляется то, что существующие алгоритмы
не достаточно полно учитывают оптимизацию достоверности обнаружения информационных нарушений в условиях изменяющейся помеховой обстановки. Как
следствие, нет достаточно эффективных алгоритмов, поддерживающих двухконтурный цикл идентификации и компенсации информационных нарушений ИИС.
Во второй главе дана теоретическая постановка задачи разработки алгоритмов контроля, диагностики и управления состоянием ИИС в условиях
изменяющейся помеховой обстановки.
Основным исследовательским инструментом при проектировании алгоритмов и математического обеспечения контроля и устранения информационных
нарушений в ИИС является моделирование на компьютерах, а математическими
методами - динамические модели нарушений в исследуемых системах, оптимальная фильтрация, вероятностные показатели качества, методы многофакторного
анализа, робастные методы.
Комплексная работа сложной динамической системы (ДС) с контролем, диагностикой и устранением информационных нарушений предполагает организацию двухконтурного цикла алгоритма в режиме реального времени
и на основании пост данных, полученных в результате очередного цикла
эксплуатации системы или испытаний.
Для синтеза устойчивых к отказам алгоритмов получения и обработки
информации в ИИС, а также для оптимизации точности оценивания физических параметров ДС при возникновении отказов, составлены математические модели, адекватно отражающие эти отказы.
В основу положена матричная модель e(t) информационных нарушений, которая является аддитивной составляющей уравнения состояния ДС.
X& (t ) = FX (t ) + ei (t ) + Gw(t ), i = 0, N .
При этом расширенный вектор состояния, X~ = ( X T , e T )T имеет уравнение
динамики
~
~
X& (t ) = F i X (t ) + G i w(t ), i = 0, N .
5
В алгоритмах применяются Марковские модели погрешностей e(t) это оправдано их частым использованием на практике в задачах обработки
информации и подтверждено исследованиями ИИС, рассматриваемых в диссертации.
Описание погрешностей бесплатформенной инерциально-спутриковой
навигационной системы (ИНС), рассматриваемой в прикладной задаче, базируется на модели погрешности построения экваториального и географического трехгранников, погрешности построения и выработки основных навигационных параметров и погрешностей датчиков первичной информации.
Алгоритм самоорганизующегося процесса настройки с параметрической адаптацией используется для уменьшения априорных неопределенностей вектора параметров, посредством последовательных наблюдений входных и выходных сигналов и их статистической обработке. В самоорганизующемся процессе настройки достигается оптимальное сочетание процессов наблюдения и управления. При этом оптимизируется вероятность, характеризующая
достоверность контроля и параметры алгоритма контроля.
Отличительной особенностью предлагаемых алгоритмов самонастройки является самоорганизация в реальном времени, что позволяет исключить
допущения в моделях законов распределения используемых процессов, допущения о видах нарушений и др. допущения, свойственные теоретическим
моделям или моделям, применяемым в компьютерных испытаниях.
В сложных измерительных системах, где вероятность возникновения
информационных нарушений достаточно высока (как показывают статистические наблюдения на уровне 10-3 ), ошибки контроля и диагностики требуется
обеспечить на малом уровне практически равном апостериорной вероятности возникновения нарушений (≈ 10-5).
Апостериорные вероятности ошибок контроля 1-го и 2-го рода
P( H 0' / B' ) P( B' )
P( H 0 / B) P( B)
α c = P( B' / H 0' ) =
, βc = P( B / H 0 ) =
, (1)
P( H 0 / B) P( B) + P( H 0 / B' ) P( B' )
P( H 0' / B' ) P( B' ) + P( H 0' / B) P( B)
где H0, H'0 - гипотезы об отсутствии и наличии отказа; B, B' - события наличия и
отсутствия отказа в системе; P(H0 /B), P(H0 /B'), P(H'0 /B), P(H'0 /B'), - условные априорные вероятности; P(B), P(B') - безусловные априорные вероятности. Отказ
измерительной системы наступает при возникновении хотя бы одного элементарного информационного нарушения. Полнота контроля, в этом случае, имеет вид
n
W = 1 − P U A j P(B) ,
j
=
m
+
1
(2)
где {Aj}, j = 1,…, m - множество контролируемых информационных нарушений,
{Aj}, j = m + 1,…, n - множество неконтролируемых нарушений.
Самоорганизующаяся ИИС оптимизируется по гарантированному по вероятности показателю качества. Используется функционал вероятности
Рβс(и) = P{Ф(и,ω)≤βс}
(3)
Рβс(и) - вероятность события, состоящего в том, что случайная величина Ф(u,ω) не
превышает заданного значения βс (βс. - вероятность необнаруженного отказа). Эта
вероятность функционально зависит от стратегии управления и процессом компенсации. На основе функционала вероятности получен функционал квантили
Фα (u) = min{ βc : Pβ (u) ≥ αc },
(4)
где αс - заданная вероятность (вероятность ошибки контроля первого рода).
Функционал квантили обозначает минимальный уровень βс не превышаеc
c
6
мый случайным значением Ф(и,ω) с вероятностью Рβс(и) ≥ αс, т.е. это гарантированное по вероятности значение функционала Ф(и,ω).
В третьей главе разработаны алгоритмы самоорганизующегося процесса
обнаружения, идентификации и компенсации информационных нарушений в общем случае для измерительной системы оценивания параметров состояния динамической системы и в прикладной задаче - ИИС технологического процесса.
Функциональная надежность ИИС зависит от адекватности математических
моделей ошибок первичных измерителей реальным измерительным процессам.
Нарушение такой адекватности в традиционных алгоритмах приводит к расходимости, используемого для оценивания фильтра Калмана и нарушению работоспособности ИИС.
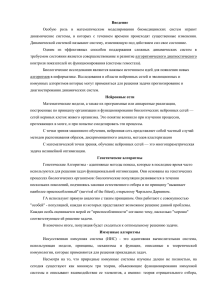
Решение задачи обнаружения, идентификации и компенсации информационных нарушений основано на двухконтурном цикле идентификации и компенсации информационных нарушений ИИС во времени. Предлагаемая структура обеспечения такого подхода при решении общей задачи оценивания, идентификации и
управления состоянием ИИС представлена на рисунке 1.
Измерения
Модель
идеального
движения
объекта
Модель
ошибок
Контроль,
идентификация,
оптимальное
оценивание
Регистрация
Уточнение
моделей
ошибок
Обработка данных в реальном времени
Расширение
базового
вектора
состояния
Корреляционная
постобработка
оценок
Идентификация
моделей
ошибок
Постобработка зарегистрированных данных
Рисунок 1. - Функционирование ИИС при идентификации и компенсации.
Изменение конфигурации исходной системы ИИС производится только после решения задачи обнаружения. Настройка ИИС заключается в изменении комплекса параметров: динамических моделей нарушений, алгоритмов фильтрации и
настраиваемых параметров алгоритма контроля.
Для разработки алгоритмов устройства контроля важным вопросом является
обеспечение оптимальной достоверности контроля информационных нарушений
ДС на основе минимума вероятности необнаруженных нарушений при ограничении на вероятность ложных решений о наличии таких нарушений. От этого зависит эффективность применения контроля и его целесообразность.
В общей постановке задачи идентификации отказов при Марковской модели
состояний объекта наблюдения и ошибок первичных измерителей динамическая
система описывается уравнением состояния
X(k +1) = F{X(k), V(k), γ[k,υ1(m1), υ2(m2),… υN (mN)]},
(5)
где вектор γ зависит от N изменяющихся параметров, величина изменения i-го параметра υi и время его появления mi ( i = 1, N ) являются случайными величинами.
В уравнение наблюдений ДС также входят изменяющиеся параметры, т.е.
Y(k) = h {X(k), N(k), γ[k, υ1(m1), υ2(m2),…, υN (mN)]}.
(6)
Пусть в каждый момент времени может измениться не более чем один из
параметров, а частота возникновения этих изменений настолько низка, что в распоряжении наблюдателя имеется достаточно времени для принятия решения.
При этих предположениях необходимо диагностировать изменившийся параметр, произвести оценку величины нарушения параметра υi, произвести ком-
7
пенсацию и оценить расширенный вектор состояния системы X(k).
В общем случае рассматриваемая задача относится к классу задач совместного оценивания нестационарных параметров и состояний ДС.
1 Общий алгоритм идентификации и компенсации информационных нарушений.
Предлагаемый алгоритм обнаружения, идентификации и компенсации постепенных информационных нарушений в ИИС разработан на основе принципов
самоорганизующегося процесса идентификации и управления с параметрической адаптацией. Основным отличием предлагаемого алгоритма от существующих является введение самонастройки параметров устройства контроля и параметров моделей нарушений в составе общего вектора состояния ИИС, при условии обеспечения оптимальной достоверности контроля.
Научная новизна предлагаемого алгоритма состоит в эффективном обнаружении постепенных отказов ИИС при на основе обеспечении оптимальной достоверности контроля.
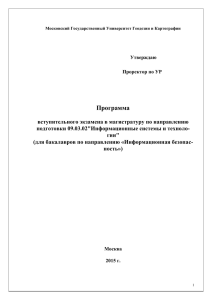
Блок оценивания
На рисунке 2 представлена
X^(k)
u(k)
структурная
схема контроля, самоX'(k +1/k +1) = FX'(k/k) + Gu(k)
организующегося управления и
E(k+1/k)
C
X"(k +1/k +1) = FX"(k/k) + KE(k +1/k)
оценивания, реализующая разраy(k)
ботанный алгоритм. Приняты следующие обозначения: u(k) - заданное детерминированное воздейстВычисление
вие; y(k) - вектор измерений; Е′(k+1/k)
Настраиваемый
y(k) E(k+1/k)
матриц
компаратор
- обновляющий процесс; X′(k/k),
Блок
коэффициентов
X′′(k/k) - детерминированная и стоидентификации
Блок настройки
хастическая составляющие вектора
нарушений
параметров
состояния объекта наблюдения;
D2/D1
b
q
X^(k) - вектор оценок; F, G, K, C матрицы коэффициентов; D1, D2 Блок контроля
дисперсии шумов измерения конРисунок 2. - Структурная схема контроля,
управления и оценивания.
тролируемого канала в текущем и
предыдущем цикле контроля; b -масштабирующий коэффициент допуска контроля; q - вероятность отсутствия информационного нарушения.
Схема содержит два основных блока: 1) блок оценивания, 2) блок контроля.
В блоке идентификации нарушений используется аппроксимация зависимостей параметров алгоритма контроля от вероятностей ошибочных решений αc и
βc. Эти зависимости получены на этапе экспериментальных исследований ИИС в
условиях изменяющейся помеховой обстановки путем многофакторного эксперимента. Применение методики многофакторного эксперимента позволило получить
апроксиммирующие зависимости с заданной точностью. Выходные параметры
блока идентификации нарушений: D2 /D1 (дисперсии шума в текущем состоянии к
дисперсии шума предыдущего состояния), b и q, определяются оптимальным образом - с гарантированным уровнем значимости.
Идентифицированные параметры используются для изменения алгоритма
работы настраиваемых компараторов (один из контуров контроля с компаратором
показан в левой части схемы). Настраиваемые компараторы в свою очередь
управляют блоками, осуществляющими компенсацию нарушений.
На схеме показана связь от блока идентификации нарушений на вычисли+
+
+
+
8
тельный блок. Она предназначена для выработки управляющего сигнала начала
компенсации и для передачи значений идентифицированных параметров измерительных шумов и медленных составляющих ошибок используемых моделей для
вычисления матриц коэффициентов фильтра (соответствующих идентифицированному состоянию).
2
2
По результатам идентификации настраиваются параметры: c = σ 2 σ1 , b, q и
коэффициенты матриц оценивающего устройства. Оперативный блок контроля,
представленный в левой части схемы реализует сравнение обновляющего процесса E = Y − CXˆ , поступающего с блока оценивания с вычисленным пороговым
значением
Eпор ( j ) =
σ12 ( j )
σ 22( j )
q(1 / j ) ⋅ ε
2 ln 2
⋅ b( j ) ,
σ1( j ) (1 − ε)[1 − q(1 / j ) ]
(7)
где q(1/j) - вероятность отсутствия информационного нарушения на j-м цикле контроля реального времени; ε - доверительная вероятность при допусковом контроле
процесса; b(j) - масштабирующий коэффициент допуска контроля; D1( j ) = σ12( j ) ,
D2( j ) = σ 22( j ) - дисперсии шумов измерения контролируемого канала в текущем и
предыдущем цикле контроля.
Управление параметром b (масштабирующим коэффициентом порога контроля) основано на использовании аппроксимирущих таблиц вероятностей ошибок контроля (αc + βc = f (σ 22 σ12 , b, q ) ).
Экспериментальным
путем
определяются
критические
значения
2
2
cкр = σ 2 σ1 , ниже которых нецелесообразно выполнять управление параметрами
(неразличимые шумы): с < cкр - нет эффективности или отрицательная эффективность, c > cкр - есть эффективность от управления параметрами.
2 Идентификация и компенсация информационных нарушений в реальном
времени.
Алгоритм основан на вероятностных байесовких оценках состояний, с применением калмановской фильтрации. При компенсации информационных нарушений используется оценивание и коррекция параметров марковских моделей в
реальном времени. Применительно к ИИС состояния отражают реальную помеховую обстановку и их идентификация обеспечивает устранение параметрической
неопределенности.
В качестве критерия оптимальности используется функция ρ(β), которая
связана с оценкой x̂ i вектора ошибок ИИС хi в i-й момент времени соотношением
xˆi = arg min
xi
if
∑ ρ(βi )
i =i0 +1
(8)
где ρ(β) = – ln f (β); f(β) - функция плотности вероятности; βi = vi/αi - нормированная невязка; vi - невязка между реальным yi, и прогнозируемым yˆ i = C i xˆ i значениями наблюдений; Ct - вектор состава измерений; αi - нормирующий коэффициент.
При динамике движения x(k)–Fx(k–1)–Gu(k–1)=0 решением задачи (8) является
алгоритм робастного оценивания, реализуемый на основе аппроксимационных зависимостей. Для идентификации информационных нарушений необходимо знать
условную плотность вероятности f(X(k)/Yk). Эта плотность вероятности вычисляется по формуле Байеса для законов распределения
9
f ( X (k ) / Y ) =
k
f (Y(k ) / X ( k ) ) f ( X (k ) / Y k −1 )
(9)
k −1
f (Y( k ) / Y )
Плотность распределения оценок экстраполяции f(X(k)/Y k–1) при отсутствии
информационных нарушений аппроксимирована гауссовской плотностью. При
нарушении гауссовости невязок появляется несоответствие априорно принятых
параметров оценивающего фильтра реальному измерительному процессу.
Для определения отклонений параметров vj и βj от их реальных значений
используется адаптивный алгоритм распознавания гипотез на основе вычисления
гауссовских функций плотности вероятности.
Вероятность q(1/k) вычисляется по формуле Байеса:
q(1 / k ) =
f (Y( k ) / Y k −1 , γ = 1) q(1 / k −1)
k −1
,
(10)
∑ f (Y( k ) / Y
, γ = i ) q( i / k −1)
где q(1/k), (1 – q(1/k)) - вероятности соответственно наличия и отсутствия информационного нарушения на k-1 шаге.
В этом случае полагаем, что γ(k) неизвестная, но постоянная на интервале
наблюдения величина. Априорная информация о величине γ(k) задана ее распределением. Оптимальная оценка вектора состояния вычисляется в соответствии с соотношениями фильтра Калмана, апостериорная вероятность отсутствия информационного нарушения системы определяется по рекуррентной формуле (10).
Начальное условие для параметра γ(k) при полной априорной неопределенности соответствует распределению параметра q(1\k-1) = q с равномерной плотностью на интервале 0,1. Математические преобразования дают конечное рекуррентное выражение для q(1/k):
w
q(1 / k −1) f (1k )
q(1 / k ) = w
w
.
(11)
q(1 / k −1) f (1k ) + [1 − q(1 / k −1) ] f (ik )
В реальном алгоритме (11) непрерывная плотность реализуется рядом дискретных точек. Алгоритм обнаружения с использованием вычисленной вероятности q(1/k) удобно представить в виде последовательно выполняемых этапов.
1. При k = 1 начальное значение q(1/ k –1) определяются исходным q;
2. Вычисляется q(1/ k) по формуле (11);
3. Сравнивая E(k / k -1) с пороговым значение Eпор(k), определяется, что
- при E(k / k -1) < Eпор(k) сбоя или внезапного отказа нет,
- при E(k / k -1) > Eпор(k) сбой или внезапный отказ присутствует;
4. Если k < N, то ожидание следующего дискретного шага k = k +1 (прерывания от таймера) и переход к циклу 2;
если k ≥ N, то окончание цикла контроля реального времени и выдача q(1/ k).
Полученное значение вероятности отсутствия информационного нарушения
q(1/ k) используется далее в алгоритме реального времени для формирования порога контроля компаратора. Компаратор вырабатывает логический сигнал “0” или
“1” в зависимости от результата сравнения отклонения контролируемого параметра с порогом.
Причем нахождение в допуске контролируемого параметра классифицируется как отсутствие ошибки данного параметра, а выход за допуск ее наличие. Таким образом, принимается решение о наличии информационных нарушений.
10
При реализации моделей ошибок ИИС в реальном времени принято приближенное описание случайных дрейфов и смещений в виде марковского гауссовского процесса первого порядка
& = −α∆ω + ξσ 2a
∆ω
(15)
с экспоненциальной корреляционной функцией
R (t ) = σ 2 e − α | t | ,
(16)
2
где α = 1 / τ ; τ - время корреляции; R(0) = σ - дисперсия ошибки; ξ ∈ N (0,1) .
В соотношениях (15), (16) величина α является параметром, подлежащим
идентификации. Задача в этом случае может быть сведена к определению значения α, минимизирующего квадратичную функцию
N
∑ ( Rˆ j − σ 2 e − ατ
αˆ = arg min
α
j
)2 ,
(17)
j =1
где Rj - корреляционная функция, определяемая по экспериментальным данным:
τj =jΔ tj; ∆ti = ti − ti −1 . Экспериментальные данные оценок ошибок ДПИ x̂ i для определения R̂ j могут быть получены путем совместной обработки информации
ИИС с внешним измерителем, например, спутниковой навигационной системой.
Решением задачи (17) является алгоритм идентификации параметров α, σ2 в
реальном времени. Корреляционная функция вычисляется по рекуррентным формулам. Такой алгоритм позволяет выполнить идентификацию в режиме реального
времени и адаптивно-робастную настройку оценивающего фильтра при отклонении параметров ИИС от базовой модели ошибок.
3 Идентификация и компенсация информационных нарушений на основе
постданных.
Изменение технического состояния ДПИ в процессе эксплуатации ИИС
влияет как на параметры, так и на структуру моделей ошибок. Поэтому возникает
необходимость уточнения моделей не только в режиме реального времени, но и
по данным, полученным в результате движения объекта (динамической системы).
Для этого предлагается использовать технологию структурно-параметрической
идентификации моделей. Такая технология основана на согласовании базовых
моделей ошибок ДПИ с результатами корреляционной обработки оценок в режиме реального времени. Предусматривается расширение моделей ошибок чувствительных элементов, адекватное виду корреляционных функций при выполнении
постобработки данных, полученных в режиме реального времени. Проведенные
исследования, а также полученные экспериментальные данные и анализ результатов аналогичных исследований для частных прикладных задач показали, что такая
аппроксимация может быть выполнена, с помощью комбинации трансцендентных
функций, в частности, с помощью экспоненциально-косинусной функции, которой
соответствует более сложная модель ошибок - второго порядка.
При постобработке данных решаются следующие задачи:
- расширение базового вектора ошибок первичных измерителей ИИС путем
включения в него дополнительных элементов, характеризующих параметрические
дефекты и конструктивные особенности датчиков;
- уточнение расширенного вектора ошибок ИИС путем адаптивно-робастной
обработки зарегистрированных оценок в «обратном» времени;
- идентификация параметров моделей ДПИ, используемых для контроля в режиме реального времени, по оценкам расширенного вектора ошибок.
11
В этом случае функция робастного правдоподобия аналогична (8)
4 Экспериментальные исследования эффективности алгоритма идентификации и компенсации информационных нарушений
Разработанный алгоритм реализован в системе управления технологическим
процессом испытательной температурной установки предприятия
ООО
“ЭЛЬСТЕР Газэлектроника”. При этом:
- сформирована структура оценивающего фильтра, в котором обеспечивается идентификация и настройка параметров при изменении помеховой обстановки;
- разработаны процедуры идентификации, позволяющие настраивать параметры моделей ошибок ДПИ в режиме реального времени;
- разработана технология структурной идентификации, позволяющая уточнять порядок моделей ошибок ДПИ в зависимости от их технического состояния.
Основная часть алгоритма, идентифицирующая информационные нарушения и проводящая диагностику (классификацию нарушения в соответствии с таблицей идентификации), реализуется блоком Controller, который осуществляет алгоритм решения обратной задачи аппроксимации, используя результаты многофакторного эксперимента, проведенного на этапе компьютерного моделирования
и оценивания вероятностей ошибочных решений
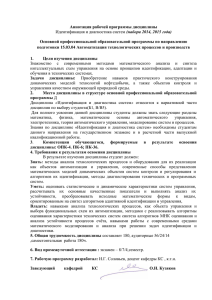
Моделировались характерные информационные нарушения типа скачкообразного изменения интенсивности измерительных шумов ДПИ.
T, C
Оценивание производилось с по60
мощью настраиваемого фильтра Кал50
мана. Результаты моделирования пред40
t, c
лагаемого алгоритма отказоустойчивого
0
100
200
300
400
500
600
700
800
900
а)
оценивания
и контроля в сравнении с
T, C
типовыми для измерительной части
60
системы управления технологическим
50
процессом представлены на рисунках 3,
40
t, c
4. На рисунке 3 представлены графики
0
100
200
300
400
500
600
700
800
900
б)
оценок температуры при информациT, C
онном нарушении типа изменения шу60
мов измерения от интенсивности 0,2 до
50
100.
На рисунке 4 графики обозначе40
t, c
0
100
200
300
400
500
600
700
800
900
ны для: 1 - при оценивании процесса
в)
предлагаемым алгоритмом; 2 - фильтРисунок 3. - Оценки температуры фильтра- ром Казаринова; 3 - обобщенным
ми: а) - с помощью ОФК; б) - с помощью отказоустойчивого фильтра Казаринова; в) - на фильтром Калмана. Экспериментальные данные подтверждают наличие обоснове предлагаемого алгоритма.
ластей параметров устройства контроD, ( C)
15
ля, дающих максимальную достовер3
ность контроля. Установлена зависи10
2
мость суммы вероятностей ошибок
1
5
контроля от порога контроля при расt, c сматриваемых информационных нару0
100
200
300
400
500
600
700
800
900
шениях. Получены оптимальные значеРисунок 4. - Дисперсия ошибок оценивания.
ния порога контроля Eпор.
Произведен сравнительный анализ эффективности предложенного варианта
ИИС с устройством идентификации и компенсации информационных нарушений
и вариантов: 1) обобщенного фильтра Калмана, 2) оказоустойчивого фильтра Ка0
0
0
0
2
12
заринова. Исследование эффективности проведено для различных вариантов
2
2
показателя c = σ 2 σ1 , где D1 = σ12 , D2 = σ 22 .
Результаты подтверждают улучшение эффективности фильтрации в среднем
на 17% по сравнению с обобщенным фильтром Калмана и на 5% по сравнению с
отказоустойчивым фильтром Казаринова.
При экспериментальном исследовании алгоритма идентификации и компенсации информационных нарушений в системе управления технологическим процессом испытательной температурной установки предприятия ООО «ЭЛЬСТЕР
Газэлектроника»
- получены конкретные математические модели обработки информации алгоритма контроля, и на их основе отработаны алгоритмы совместной обработки
информации подсистем измерительного контролирующего комплекса;
- проведена оценка и оптимизация достоверности контроля и диагностики
информационных нарушений подсистемы идентификации и в соответствии с этим
построен алгоритм компенсации.
Эффективность принятых к использованию результатов доказана повышением точности и в целом информационной надежности выдачи контролируемых
параметров и управления технологическим процессом.
5 Математическое обеспечение оптимизации параметров схемы контроля.
В разработанном алгоритме контроля пороговое значение обновляющего
процесса Eпор(k) определяется при оптимизации методом статистических испытаний Монте-Карло. Сумма вероятностей ошибок контроля 1-го и 2-го рода при
этом определяется теоретическим соотношением
Eпор
∞
Eпор
α c + β c = (1 − q(1 / k ) ) ∫ f1 (e) de + ∫ f1 (e)de + q(1 / k ) ∫ f 2 (e)de ,
(19)
− Eпор
Eпор
−∞
где q(1/k), - вероятность отсутствия информационного нарушения на k-шаге.
При неизвестных плотностях вероятности f1(e) и f2(e) минимизация суммы
(αc + βc) сводится к построению условных аппроксимирующих зависимостей от
параметров влияющих на пороговое значение Eпор.
2
2
Для расчета и построения аппроксимирующих таблиц для c = σ 2 σ1 , b и q,
соответствующих минимуму суммы (αc + βc) разработан алгоритм и программа,
предназначенные для широкого класса линейных объектов наблюдения (различной размерности матриц коэффициентов).
В четвертой главе разработан алгоритм контроля, диагностики и компенсации информационных нарушений, возникающих в интегрированной навигационной системе (ИНС) в условиях изменяющейся помеховой обстановки и алгоритм расчета и оптимизации параметров схемы контроля. Модели информационных нарушений соответствуют Марковским моделям, рассмотренным в главах 2 и
3, для навигационной системы.
Для решения задачи обнаружения и компенсации информационных нарушений необходимо:
- установить событие информационного нарушения в ИНС;
- выполнить диагностику места возникновения нарушения;
- произвести оценку и установить величину изменившихся параметров моделей ошибок;
- осуществить компенсацию возникших информационных нарушений
управлением параметрами ИНС.
13
В комплексе наземной отработки при исследовании ИНС в динамике - оборудование размещается на автомобиле, который перемещается по заданному
маршруту. Измеренные данные параметров движения объекта, полученные ИНС в
результате работы комплекса наземной отработки, записаны в файлы. Количество
данных соответствует периоду времени 0 - 1692 с., т.е. по 16920 значений каждого
параметра.
Исследование эффективности оценивания проводилось путем компьютерного моделирования с помощью инженерного пакета MatLab. Путем статистической
обработки составлены модели ошибок. Они представлены в виде сумм флюктуационных и медленно меняющихся составляющих.
Вспомогательные измерения формируются в виде (φ – φс) = –Δφс + Δφ, (λ –
λс) = = –Δλс + Δλ. Вводя векторы х = ((хI)T,(хII)Т)Т, w = ((wI)T,(wII)T)T, так что хI =
(Δφс, Δλс)T, хII = (δφ, δλ, δV, δK)T сформулирована задачу фильтрации шестимерного вектора х, описываемого с помощью уравнений x& = F ( x, w) по двухмерным
измерениям y = Hx + v.
Искомые координаты определяются с помощью оценок ∆ ϕˆ с , ∆ λ̂ с по формулам: ϕˆ = ϕ с − ∆ϕˆ с , λ̂ = λ с − ∆ λ̂ с .
Оценивание 6 компонент вектора состояния производится с помощью трех
уравнений - двух скалярных и одного матричного. Вычисление весовой матрицы
фильтра Калмана K выполняется в соответствии с традиционным уравнением
Риккати для средних значений переменных K, V, ϕ. При переходе на другой режим навигационного движения производится перерасчет весовой матрицы.
Вычисление ∆ϕˆ c , ∆λˆ c производится в соответствии с уравнениями
cos K ˆ V sin K ˆ
δV −
δK + k11 (∆ϕ − ∆ϕˆ c − δϕˆ ) +
Rз
Rз
+ k12 (∆λ − ∆λˆ c − δλˆ ) + k13 (∆V − δVˆ ) + k14 (∆K − δKˆ )
(20)
sin K ˆ V cos K ˆ
& − V sin K
∆λˆ c =
∆ϕˆ c +
δV +
δK + k21(∆ϕ − ∆ϕˆ c − δϕˆ ) +
Rзcosϕ
Rзcosϕ
Rзcosϕ
.
+ k (∆λ − ∆λˆ − δλˆ ) + k (∆V − δVˆ ) + k (∆K − δKˆ )
(21)
∆ϕˆ& c =
22
c
23
24
Детерминированную часть соотношений вычисляют функциональные блоки. Обратную связь в фильтре k11(∆ϕ − ∆ϕˆ c − δϕˆ ) + k12 (∆λ − ∆λˆ c − δλˆ ) , k 21 ( ∆ϕ − ∆ϕˆ c −
− δϕˆ ) + k22 ( ∆λ − ∆λˆ c − δλˆ ) вычисляют блоки обновляющих процессов ∆ϕ − ∆ ϕˆ c −
− δϕˆ , ∆λ − ∆λˆ c − δλˆ и функциональные блоки (подробная схема вычислений приведена в диссертации). Входными переменными алгоритма контроля являются
измерения (для канала широты – φm , для канала долготы – λm). Этот блок идентифицирует значения дисперсий шумов (отдельно для широты и долготы).
При использовании разработанного алгоритма на основании данных, предоставленных ОАО АНПП «ТЕМП – АВИА», проведены экспериментальные исследования посредством компьютерного моделирования и дан анализ эффективности предложенных решений в сравнении с традиционно-применяемыми.
Экспериментальное исследование эффекта фильтрации проводилось на основе численных оценок дисперсии ошибок. Результаты дисперсий ошибок оценивания при заданных дисперсиях ошибок измерения Deφ.изм = 2,99·10-8 рад2 и Deλ.изм
= 2,1·10-7 рад2 составляют:
для предлагаемого устройства оценивания - Deφ= 2,67·10-12 рад2, Deλ = 5,9·10-9 рад2.
14
− для фильтра Казаринова Deφ= 7,45·10-12 рад2, Deλ =
14
7,5·10-9 рад2;
12
1
− для обобщенного фильтра
10
2
Калмана – Deφ = 9,7·10-11 рад2,
8
Deλ = 1,52·10-7 рад2.
6
3
Эффект
применения
4
предлагаемого
алгоритма
кон2
t, c троля и адаптивного оценива0
200
400
600
800
1000
ния состоит в улучшении инD • 10 , рад
формационной точности:
16
− для φ по сравнению с отка14
зоустойчивым фильтром Каза12
1
ринова в 1,67 раза и обобщен10
ным фильтром Калмана в 6,027
8
3
2
раза;
6
− для λ по сравнению с отка4
2
зоустойчивым фильтром Казаt, c ринова в 1,127 раза и обоб0
200
400
600
800
1000
щенным фильтром Калмана в
Рисунок 8. - Дисперсия оценивания φ, λ: 1 - обобщен5,076 раза.
ным фильтром Калмана; 2 - отказоустойчивым
Полученные, при модефильтром Казаринова; 3 - предлагаемым алгоритDeϕ • 10-12, рад2
16
eλ
-9
2
мом.
лировании экспериментальные данные досто(α + β )
0,03
верности контроля подтверждают наличие облас2
тей параметров, дающих максимальную досто0,02
10
5
верность контроля. На рисунке 5 показаны зависимости суммы вероятностей ошибок контроля от
0,01
порога контроля при рассматриваемых информаb
0
ционных нарушениях для начальных значений D1
0,1
0,2
0,3
Рисунок 5. - Зависимость
= 1,5 · 10-6 рад2. Оптимальные значения порога
вероятности ошибок контроля.
контроля Eпор представлены пунктирной линией.
c
c
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
1. Проведен анализ моделей характерных информационных нарушений ИИС.
2. Разработан алгоритм идентификации и адаптивной настройки ИИС, компенсирующий постепенные информационные нарушения при минимуме ошибочных
решений.
3. Реализован двухконтурный цикл идентификации и компенсации, отличающийся
системным подходом на основе циклического алгоритма: обработка в реальном
времени - постобработка - обработка в реальном времени.
4. Разработаны принципы построения и математическая реализация алгоритмов
расчета, оптимизации достоверности контроля и диагностики информационных
нарушений ИИС.
5. Предложена новая структура системы контроля, диагностики и устранения информационных нарушений для блока определения ориентации в интегрированной навигационной системе и в системе управления испытательной температурной установки.
6. Представлены результаты экспериментальных исследований, которые доказали
эффективность предложенного алгоритма, что подтверждено актами внедрения
на предприятиях.
15
ОСНОВНЫЕ РАБОТЫ ПО ТЕМЕ ДИССЕРТАЦИИ
[1] Волкова (Жидкова) Н.В. Исследование датчиков первичной информации методом статистических испытаний Монте-Карло. – Сборник материалов Всероссийской молодежной НТК «Приборостроение в аэрокосмической технике». –
Арзамас, 1999. с.24 - 28.
[2] Жидкова Н.В. Обзор исследований, связанных с моделированием состояния и
обеспечением безотказной работы динамических систем. – Сборник статей по
материалам ВНТК. Технологии в машино- и приборостроении. – Н. Новгород,
2003. с. 465 - 469.
[3] Жидкова Н.В. Синтез оптимальной динамической системы по неявному функционалу качества. – Материалы 2-й региональной молодежной НТК «Будущее
технической науки Нижегородского региона». – НГТУ, Н. Новгород, 2003.
[4] Жидкова Н.В., Волков В.Л. Достоверность контроля состояний нелинейной
адаптивной измерительной системы. – Прогрессивные технологии в машино- и
приборостроении «ПТ-2004». – Материалы ВНТК Н.Новгород – Арзамас, 2004.
[5] Жидкова Н.В., Волков В.Л. Нелинейная адаптивная измерительная система с
заданной достоверностью контроля состояний. – Сборник материалов седьмой
научно-технической конференции «Информационные технологии в промышленности и учебном процессе». – М.: ООО Риасофт ЛТД, 2004. с.23 - 24.
[6] Жидкова Н.В., Волков В.Л. Алгоритм адаптивной фильтрации измерительной
системы с марковской моделью состояний. – Тесисы докладов ВНТК «Информационные системы и технологии ИСТ-2004». – НГТУ, Н.Новгород, 2004.
[7] Жидкова Н.В. Взаимосвязь точности оценок и полноты контроля состояний
марковской адаптивной измерительной системы. – Тесисы докладов III Молодежной НТК «Будущее технической науки». – НГТУ, Н.Новгород, 2004. с. 94 95.
[8] Жидкова Н.В. Математическое обеспечение для проектирования и исследования динамических систем. – Радиотехника, №6, 2004.
[9] Жидкова Н.В. Моделирование нелинейной адаптивной измерительной системы
в Matlab Simulink. – Сборник материалов седьмой научно-технической конференции «Информационные технологии в промышленности и учебном процессе». – М.: ООО Риасофт ЛТД, 2004. с. 24 - 28.
[10] Жидкова Н.В., Волков В.Л. Идентификация и компенсация отказов измерительной системы. – Гироскопия и навигация, № 4, 2005.
[11] Zhidkova N.V., Volkov V.L. The algorithm of self-organizing process for identification and compensation of measuring system failures. – 12th Saint Petersburg
international conference on integrated navigation systems. – SPB.: Elektropribor,
2005. p. 126 - 127.
[12] Zhidkova N.V., Volkov V.L. The robust algorithm of identifications and compensation of information refusals of a navigation system. - 13th Saint Petersburg international conference on integrated navigation systems. – SPB.: Elektropribor, 2006. p.
131 - 135.
Подписано в печать 01.02.2007 г. Формат 60×84/16
Усл. печ. листов 1. Бумага офсетная.
Печать офсетная.
Гарнитура Times New Roman.
Заказ № 711. Тираж 100 экз.
Отпечатано в ОАО «Арзамасская типография»
607220 г. Арзамас Нижегородской области, ул. Пландина, 8
16