Санкт-Петербургский государственный университет ТЕОРИИ
advertisement

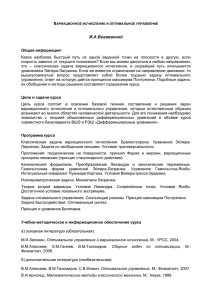
Факультет ПМ-ПУ СПбГУ Санкт-Петербургский государственный университет Факультет прикладной математики – процессов управления д. ф.-м.н., профессор Веремей Е.И. курс лекций по ТЕОРИИ УПРАВЛЕНИЯ Часть 1. Вариационные методы теории оптимального управления Санкт-Петербург 2006 1 Факультет ПМ-ПУ СПбГУ Введение 1. Общее представление о теории управления Теория управления – это раздел прикладной математики, базирующийся, в первую очередь, на теории обыкновенных дифференциальных уравнений и ориентированный на решение так называемых обратных задач динамики. Что такое прямые и обратные задачи динамики легко показать на примере системы обыкновенных дифференциальных уравнений (ОДУ), представленной в нормальной форме Коши. Вначале рассмотрим систему xɺ = f (t , x) , (1) где t ∈ [0, T ] – независимая вещественная переменная (время), x ∈ E – n вектор n -мерного вещественного евклидова пространства, xɺ = dx(t ) – dt первая производная от функции x(t ) . Будем считать, что правая часть системы (1) определена на множестве [0, T ] × E и удовлетворяет там условиям существования и единственности решения задачи Коши. n Прямой задачей динамики называют задачу о поиске частного решения x(t ) системы (1), удовлетворяющего некоторым граничным условиям, например – начальным условиям x(0) = x 0 . Иными словами, уравнения (1) связывают заранее неизвестные функции x(t ) и их производные xɺ (t ) , причём эти функции могут быть однозначно определены в результате решения прямой задачи динамики. Теперь, наряду с (1), введём в рассмотрение иную систему обыкновенных дифференциальных уравнений xɺ = f (t , x, u) , (2) где обозначения t и x имеют прежний смысл. Будем трактовать их как основные переменные системы (2). Наряду с ними в эту систему введены дополнительные переменные, которые в каждый фиксированный момент m времени представляются m -мерным вещественным вектором u ∈ E . В 2 Факультет ПМ-ПУ СПбГУ общем случае их можно задать как некоторые функции от основных переменных u = u(t , x) . (3) Пусть выбор функций u = u(t , x) ограничен принадлежностью некоторому определённому множеству U . Будем считать, что для любой функции u(t , x) ∈ U правая часть системы (2) определена на множестве [0, T ] × E n и удовлетворяет там условиям существования и единственности решения задачи Коши. Заметим, что пока функции (3) не заданы конкретно, система (2) не полностью определена, следовательно – не имеет определённого решения x(t ) , удовлетворяющего начальным условиям x(0) = x 0 . Но тогда выбор векторной функции u = u(t , x) позволяет влиять на поведение решения системы (2). Действительно, пусть мы взяли некоторую конкретную функцию u = u* (t , x) ∈ U . Подставим эту функцию в правую часть системы (2) и введём обозначение f * (t , x) = f (t , x, u* (t , x)) . Решая при этом задачу Коши для системы ОДУ xɺ = f * (t , x) , x(0) = x 0 , (4) на отрезке t ∈ [0, T ] , найдём конкретное решение x (t ) , соответствую* * щее выбранной функции u . Изменив выбор, при тех же начальных условиях x(0) = x 0 получим другое решение. Это обстоятельство позволяет трактовать переменные u как управления, т.е. как рычаги воздействия на динамику с целью достижения желаемых результатов. Понятие «желаемого результата» предполагает математическую формализацию, которую пока определим, как требование принадлежности решения задачи Коши некоторому множеству X функций x(t ) , удовлетворяющих заданным начальным условиям x(0) = x 0 и системе (2) на отрезке t ∈ [0, T ] . Изложенное выше позволяет ввести определение для обратной задачи: 3 Факультет ПМ-ПУ СПбГУ Обратной задачей динамики называют задачу о поиске такого * * управления u = u (t , x) ∈ U , чтобы соответствующее ему решение x (t ) задачи Коши для системы (4) на отрезке t ∈ [0, T ] имело желаемый характер, т.е. x (t ) ∈ X . * Теперь посмотрим на обратные задачи динамики не с формализованной математической, а с содержательной стороны. На рис. 1 схематически изображен морской катер (вид сверху), управляемый по курсу с помощью отклонения вертикального руля. x1 δ φ x Рис. 1. Пример управляемого объекта. Если повернуть руль на угол δ = δ , то катер будет разворачиваться по курсу, изменение которого в функции времени представляется зависи* мостью ϕ = ϕ (t ) (рис. 2). Такую функцию можно построить по точкам, наблюдая движение при ходовых испытаниях. Это прямая задача динамики в содержательной постановке. * 100 90 S 80 ϕ* (t ) yaw grad 70 60 50 40 30 20 10 0 0 10 20 30 40 50 t sec 60 70 80 90 100 Рис. 2. Изменение курса в функции времени. 4 Факультет ПМ-ПУ СПбГУ Обратная задача динамики для этого примера состоит в таком выборе функции δ = δ (t , ϕ) , чтобы график соответствующей функции * ϕ* (t ) , определяющей закон разворота по курсу, не выходил за границы указанного на рис. 2 «коридора» S . В рассматриваемом примере угол δ поворота рулей относительно нейтрального положения исполняет роль управления. Если функция δ = δ (t , ϕ) найдена, то в процессе движения она реализуется системой автоматического управления катером в виде электрических сигналов, подаваемых на гидравлический привод руля. * На рис. 3 приведена обобщённая структурная схема системы автоматического управления, которая носит универсальный характер для широкого класса конкретных реализаций. Внешняя среда Объект управления δ Исполнительный привод u x Измерительная система y ЦЕНТРАЛЬНЫЙ БЛОК Рис. 3. Обобщённая структура систем управления. На схеме выделены следующие элементы: • объект управления – это та часть внешней среды, которая представляет какой-либо интерес и на которую должно воздействовать управление с целью достижения желаемого результата; • измерительная система – совокупность элементов и способов, которые обеспечивают получение и выдачу информации о состоянии объекта; • исполнительный привод – совокупность элементов и способов непосредственной передачи управляющего воздействия на объект; 5 Факультет ПМ-ПУ СПбГУ • центральный блок управления – главный элемент системы, обеспечивающий формирование управляющего сигнала (управления). Естественно, что прикладные математики, специализирующиеся в области систем управления, не рассматривают реальные элементы приведенной схемы – они изучают только математические модели этих элементов. В частности, математической моделью объекта управления чаще всего являются системы обыкновенных дифференциальных уравнений вида (2). При этом содержательная задача о выборе управления, обеспечивающего желаемый характер поведения объекта, получает формализованное математическое представление в виде соответствующей обратной задачи динамики. Эти задачи и составляют основу теории управления. 2. Вопросы оптимизации в теории управления Решение обратных задач динамики, рассматриваемых в теории управления, если оно существует, в большинстве случаев бывает неединственным. Это значит, что существует определённая свобода выбора среди множества управлений, обеспечивающих желаемый характер поведения объекта. Заметим, что подобные обстоятельства очень часто встречаются в жизненных ситуациях, когда к желаемой цели ведут многие пути. При этом возникает естественное стремление выявить, какой из путей будет лучшим. Однако в жизни не всегда удаётся чётко определить тот критерий, по которому можно сравнивать между собой различные варианты, выбирая среди них наилучший. В теории управления этот вопрос должен решаться на строгом формализованном уровне. Это значит, что кроме чётко сформулированной цели управления должны быть указаны некоторые числовые характеристики, которые позволяют сравнивать между собой различные варианты выбора управляющих воздействий из допустимых множеств. В качестве таких характеристик в практических приложениях теории управления используются различные показатели: точность и экономичность управления, надёжность и технологичность изготовления систем, сроки достижения целей и многие другие. Естественно, что в каждой конкретной задаче теории управления должны рассматриваться вполне конкретные показатели для сравнения, позволяющие ставить вопрос о выборе наилучшего варианта по отношению к данному показателю. 6 Факультет ПМ-ПУ СПбГУ Рассмотрим пример с двумя вариантами выбора управляющего воздействия как функции времени. Пример 1. Пусть по рельсам движется тележка (рис. 4) с единичной массой без трения под действием силы u (t ) , ограниченной по модулю: u (t ) ≤ 1 . Положение тележки в каждый момент времени будем характеризовать её смещением x по отношению к начальной точке O . Будем считать, что положение и скорость тележки в начальный момент времени t = 0 имеют нулевые значения: x0 = x(0) = 0 , xɺ0 = xɺ (0) = 0 . u(t) M O x 2π x Рис. 4. Тележка, движущаяся под воздействием управляющей силы u (t ) . Зададимся целью перевести тележку с помощью силы u (t ) из начальной точки O в конечную точку M с координатой xm = 2π , погасив при этом её скорость до нулевого значения. Для формализованного рассмотрения вопроса введём в рассмотрение математическую модель движения тележки (или математическую модель объекта управления). В качестве такой модели примем дифференциальное уравнение второго порядка ɺxɺ = u (t ) , (4) записанное в соответствии со вторым законом Ньютона. Формализованная цель управления – это перевод переменных состояния модели (4) (смещения x и скорости xɺ ) из начального положения x0 = 0 , xɺ0 = 0 в конечное положение xm = 2π , xɺ m = 0 с учётом ограничения u (t ) ≤ 1 . При этом время перехода заранее не задаётся. Рассмотрим два варианта выбора управляющей силы, как функции времени, и покажем, что они оба обеспечивают достижение поставленной цели управления. 7 Факультет ПМ-ПУ СПбГУ Вариант 1. Пусть управление задаётся формулами (рис. 5) sin t , если t ≤ 2π; u (t ) = u1 (t ) = 0, если t > 2π. (5) Заметим, что ограничение u (t ) ≤ 1 для управления (5) выполняется. При указанном выборе управления на отрезке t ∈ [0, T1 ] , где T1 = 2π , математическая модель движения принимает вид ɺxɺ = sin t , откуда следует xɺ (t ) = ∫ sin tdt = − cos t + c1 . Учитывая начальное условие по скорости, имеем 0 = − cos 0 + c1 ⇒ c1 = 1 . Таким образом, скорость тележки на отрезке t ∈ [0, T1 ] изменяется в соответствии с формулой xɺ (t ) = xɺ1 (t ) = 1 − cos t. Тогда x(t ) = ∫ (1 − cos t )dt = t − sin t + c2 , причём из начального условия по смещению получим 0 = 0 − sin 0 + c2 , откуда c2 = 0 , т.е. на данном отрезке времени смещение изменяется по закону x(t ) = x1 (t ) = t − sin t . Подставляя в полученные формулы t = T1 = 2π , имеем xɺ1 (T1 ) = 0 и x1 (T1 ) = 2π , причём ни в какой другой точке на отрезке t ∈ [0, T1 ] эти равенства одновременно не выполняются. Для моментов времени t > T1 имеем u1 (t ) ≡ 0 , xɺ1 (t ) ≡ 0 , x1 (t ) ≡ 2π . В итоге можно сделать вывод о том, что в данном варианте управление (5) переводит тележку из заданного начального положения в заданное конечное положение, причём делает это за время T = T1 = 2π ≈ 6.28 . 8 Факультет ПМ-ПУ СПбГУ Вариант 2. Зададим управление в виде (рис. 5) 1, если t ≤ τ; u (t ) = u 2 (t ) = − 1, если t > τ; 0, если t > T . 2 (6) Для этого варианта ограничение u (t ) ≤ 1 так же выполняется. Моменты времени τ и T2 пока считаем фиксированными параметрами. Последовательно рассмотрим уравнения движения на отрезках t ∈ [0, τ] и t ∈ [τ, T2 ] . а) При условии t ∈ [0, τ] математическая модель имеет вид ɺxɺ = 1, откуда следует xɺ (t ) = ∫ dt = t + c11 . В соответствии с начальным условием, имеем 0 = t + c11 ⇒ c11 = 0 , следовательно, скорость тележки на отрезке t ∈ [0, τ] представима формулой xɺ (t ) = xɺ 21 (t ) = t. В этом случае 1 x(t ) = ∫ tdt = t 2 + c21 , 2 причём из начального условия по смещению получим 0 = 0 + c21 , откуда c21 = 0 , т.е. на данном отрезке времени смещение изменяется по закону 1 x(t ) = x21 (t ) = t 2 . 2 В соответствии с полученными формулами, в момент времени t = τ тележка будет находиться в положении 1 xɺ 21 (τ) = τ , x21 (τ) = τ 2 . 2 (7) 9 Факультет ПМ-ПУ СПбГУ б) При условии t ∈ [ τ, T2 ] уравнения движения принимают вид ɺxɺ = −1 , откуда следует xɺ (t ) = ∫ dt = −t + c12 . По формулам (7) имеем τ = − τ + c12 ⇒ c12 = 2τ , т.е. если t ∈ [ τ, T2 ] то скорость тележки изменяется по закону xɺ (t ) = xɺ 22 (t ) = −t + 2τ. Тогда для смещения имеем 1 x(t ) = ∫ ( − t + 2τ )dt = − t 2 + 2τt + c22 , 2 причём из формулы (7) получим 1 2 1 τ = − τ 2 + 2τ 2 + c22 , 2 2 откуда c22 = − τ , т.е. в этом случае смещение изменяется по закону 2 1 x(t ) = x22 (t ) = − t 2 + 2τt − τ 2 . 2 Теперь найдём такие значения параметров τ и T2 , чтобы в момент t = T2 тележка оказалась в положении xɺ 22 (T2 ) = 0 , x22 (T2 ) = 2π . Это можно сделать, решая совместно уравнения − T2 + 2τ = 0, 1 − T22 + 2τT2 − τ 2 = 2π. 2 (8) Первое из них даёт равенство T2 = 2τ , а после его подстановки во второе имеем − 1 2 4τ + 2τ2τ − τ 2 = 2π ⇒ τ 2 = 2π , т.е. система (8), состоящая 2 из двух нелинейных уравнений с двумя неизвестными имеет единственное решение τ = 2π , T2 = 2 2π . 10 Факультет ПМ-ПУ СПбГУ a) Control sygnals u(t) 1 u1(t) 0.5 0 u2(t) -0.5 -1 0 1 2 3 4 5 6 7 5 6 7 5 6 7 b) First derivatives dx(t)/dt 3 xɺ 2 (t ) 2 xɺ1 (t ) 1 0 0 1 2 3 4 c) Displacements x(t) 6 x2 (t ) 4 x1 (t ) 2 0 0 1 2 3 4 Рис. 5. Графики функций u (t ) , xɺ (t ) и x(t ) для примера 1. После нахождения параметров τ и T2 можно в окончательном виде представить для второго варианта законы изменения управляющей силы, скорости и смещения тележки: 1, если t ≤ 2π; u (t ) = u 2 (t ) = − 1, если t > 2π; 0, если t > 2 2π; (9) 11 Факультет ПМ-ПУ СПбГУ t , если t ≤ 2π; xɺ (t ) = xɺ 2 (t ) = − t + 2 2π , если t > 2π; 0, если t > 2 2π; 1 t 2 , если t ≤ 2π ; 2 1 x(t ) = x2 (t ) = − t 2 + 2 2πt − 2π, если t > 2π; 2 2π, если t > 2 2π. В итоге можно сделать вывод о том, что управление (9) переводит тележку из заданного начального положения в заданное конечное положение, причём делает это за время T = T2 = 2 2π ≈ 5.01. Обратим внимание на то, что с помощью управления вида (6) нельзя попасть в желаемое конечное положение быстрее и медленнее, поскольку система (8) имеет единственное решение. Для сравнения на рис. 5 представлены графики изменения динамических переменных u , xɺ , x во времени для обоих рассмотренных выше вариантов выбора управлений. Сравнивая эти варианты, приходим к выводу о том, что второе управление (9) переводит тележку в желаемое конечное положение быстрее, чем первое управление (5): T2 = 5.01 < T1 = 6.28 . Возникает естественный вопрос о том, существует ли некоторое третье управление, удовлетворяющее тому же ограничению u (t ) ≤ 1 , которое обеспечивает ещё более быстрый переход? Такой вопрос является типичным для теории оптимального управления. Для данной частной задачи, которую называют задачей об оптимальном быстродействии, он отрицательный, т.е. в смысле минимума времени перехода управление (9) при ограничении u (t ) ≤ 1 является наилучшим (оптимальным). 12 Факультет ПМ-ПУ СПбГУ 3. Оптимальное управления и классическое вариационное исчисление Рассматривая пример о движении тележки, мы отметили, что задачи теории оптимального управления – это задачи о поиске таких функций (одной или нескольких независимых переменных), которые обеспечивают экстремальные значения тех или иных числовых характеристик качества управляемых процессов. Можно сказать, что задачи такого типа – это определённое обобщение задач о поиске минимумов и максимумов в математическом анализе. Однако в анализе результатом решения оказываются n -мерные вещественные векторы (в частном случае – числа), а в оптимальном управлении – функции. Естественно, что для нахождения наилучших в определённом смысле функций необходимо иметь специализированный математический аппарат. Исторически первой математической наукой, определившей появление и систематическое развитие такого аппарата, является классическое вариационное исчисление. Задачи о поиске наилучших функций были известны ещё древнегреческим математикам. В качестве примера обычно приводится задача Дидоны о поиске плоской кривой заданной длины, ограничивающей максимальную плоскость. Однако возникновение вариационного исчисления как математической науки принято относить к XVII веку. В 1696 году появилась заметка Иоганна Бернулли в научном журнале «Acta eruditorum», которая называлась «Новая задача, к решению которой приглашаются математики». Начиналась статья так: «Остроумнейших математиков всего мира приветствую я, Иоганн Бернулли! Людей высокого ума нельзя ничем более привлечь к работе, как указав им трудную и вместе с тем полезную задачу, решением которой можно и славу приобрести и оставить по себе вечный памятник…». Имелась в виду знаменитая задача о брахистохроне (βραχιστοζ – кратчайший, χρονοζ – время). Её существо состояло в поиске формы жёлоба, по которому в вертикальной плоскости скатывается шарик. Форма должна представляться гладкой кривой, причём такой, которая обеспечивает минимальное время движения из заданной начальной точки в заданную конечную точку. Далее мы рассмотрим постановку этой задачи в деталях. Решение задачи о брахистохроне было получено практически одновременно четырьмя знаменитыми учёными того времени: самим Иоганном Бернулли, его братом Якобом, Готфридом Лейбницем и Исааком 13 Факультет ПМ-ПУ СПбГУ Ньютоном. Все предложенные варианты опирались на аппроксимации искомой кривой ломаными прямыми линиями. После опубликования этих результатов стали появляться многие работы, посвящённые исследованиям подобного типа с различными методами поиска функций (или кривых), доставляющих экстремум числовым характеристикам интегрального типа (функционалам). В связи с этим, И. Бернулли поставил перед своим учеником Леонардом Эйлером проблему о построении некоторого единого подхода к решению подобных задач. Второй вехой в истории вариационного исчисления стала знаменитая работа Л. Эйлера 1744 года «Метод нахождения кривых линий, обладающих свойствами максимума или минимума». По существу, в этой работе были заложены теоретические основы новой науки. Л. Эйлер без строгого доказательства вывел дифференциальное уравнение второго порядка, которому должны были с необходимостью удовлетворять искомые кривые. Третий момент связан с именем Жозефа Лагранжа, который в 1759 году опубликовал первую работу, где были отражены новые идеи по развитию методов поиска экстремумов. Лагранж ввёл понятие вариации функционала, обобщающее понятие первого дифференциала в математическом анализе. Он достаточно строго для своего времени вывел дифференциальное уравнение, полученное ранее, и присвоил ему имя Эйлера. Именно после публикации Лагранжем результатов своих исследований Л. Эйлер предложил назвать новый раздел математики «вариационным исчислением». В 1788 году вышел в свет крупный труд Ж. Лагранжа «Аналитическая механика». Здесь впервые была поставлена и систематически исследована задача об условном экстремуме в случае, когда искомые функции должны удовлетворять уравнениям конечных или дифференциальных связей. Именно это направление служит основой для теории оптимального управления, где в качестве связей выступают математические модели объектов управления. Далее в XVIII и XIX веках вариационное исчисление развивалось усилиями таких выдающихся математиков, как Михаил Васильевич Остроградский, Карл Гаусс, Симеон Пуассон, Адриен Лежандр, Карл Якоби, Давид Гильберт и другие. С позиций теории оптимального управления исключительно значима роль Карла Вейерштрасса, который ввёл понятие вариации специального вида, которое в некоторой модификации было применено для разработки ряда современных методов оптимизации. Идеи и методы вариационного исчисления получили существенное развитие в XX веке. Здесь, прежде всего, следует отметить работы, свя14 Факультет ПМ-ПУ СПбГУ занные с обобщённым взглядом на задачи вариационного исчисления с позиций функционального анализа. Это определяется тем, что по существу вопросы вариационного исчисления могут рассматриваться как частный случай дифференциального исчисления в абстрактных метрических пространствах. Существенную роль в становлении современного взгляда на задачи о поиске экстремума сыграли исследования Мориса Фреше и Рене Гато, результаты которых были опубликованы в начале XX века. Особую значимость для данного курса имеют работы, связанные с развитием идей классического вариационного исчисления в приложении к задачам теории оптимального управления. По существу, они представляют собой обобщение методов, предложенных Ж. Лагранжем для решения задач на условный экстремум, а также необходимых условий сильного экстремума, полученных К. Вейерштрассом. Сюда можно отнести знаменитые работы академика АН СССР Льва Семёновича Понтрягина и его учеников, наиболее значимый результат которых известен под названием «принцип максимума» (1953 г.), а также труды американского математика Ричарда Беллмана, являющегося основоположником теории динамического программирования (1957 г.). Видное место в теории оптимального управления занимают результаты, полученные в работах (1957–2000 гг.) создателя факультета ПМ-ПУ СПбГУ, выдающегося математика и механика современности, чл.-корр. РАН Владимира Ивановича Зубова. В этих работах детально представлена связь классических вариационных методов и подходов, базирующихся на идеях А. М. Ляпунова. На основе этой связи В.И. Зубов получил новые формы необходимых и достаточных условий экстремума в задачах оптимального управления. Он является основоположником теории оптимального демпфирования переходных процессов, которая нашла обширное поле для теоретических исследований и практических применений. 15 Факультет ПМ-ПУ СПбГУ 4. Рекомендуемая литература а) Основная литература по вариационному исчислению 1. Эльсгольц Л. Э. Дифференциальные уравнения и вариационное исчисление. – М., Наука, 1969. 2. Гельфанд И. М., Фомин С. В. Вариационное исчисление. – М., Физматгиз, 1961. 3. Краснов Л. М., Макаренко Г. И., Киселёв А. И. Вариационное исчисление. – М., Наука, 1973. 4. Цлаф Л. Я. Вариационное исчисление и интегральные уравнения. – М., Наука, 1966. 5. Ракин Л. В. Введение в вариационное исчисление. – СПб., Изд-во СПбГУ, 2000. б) Основная литература по теории управления 1. Зубов В. И. Лекции по теории управления. – М., Наука, 1975. 2. Зубов В. И. Динамика управляемых систем. – М., Наука, 1982. 3. Алексеев В. М., Тихомиров В.М., Фомин С.В. Оптимальное управление. – М., Наука, 1979. 4. Моисеев Н.Н. Элементы теории оптимальных систем. – М., Наука, 1975. в) Дополнительная литература 1. Гюнтер Н. М. Курс вариационного исчисления. – Л.–М., Гостехиздат, 1941. 2. Демьянов В. Ф. Условия экстремума и вариационное исчисление. – М., Высш. шк., 2005. 3. Петров Ю. П. Вариационные методы теории оптимального управления. – Л., Энергия, 1977. 16