разработка практических рекомендаций для локализации
advertisement

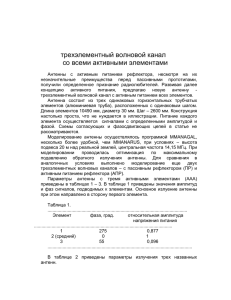
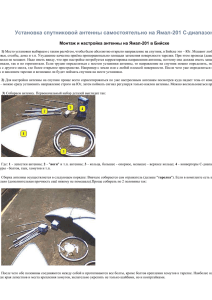
РАЗРАБОТКА ПРАКТИЧЕСКИХ РЕКОМЕНДАЦИЙ ДЛЯ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ СВЧ-ДИАПАЗОНА АМПЛИТУДНЫМ МЕТОДОМ В.А. Козьмин, В.А. Сладких ЗАО "ИРКОС", e-mail: info@ircos.ru Приведены результаты исследования влияния скорости вращения, ширины диаграммы направленности приемной измерительной антенны, скорости движения мобильной станции на точность определения координат источников радиоизлучения СВЧ-диапазона. DEVELOPMENT OF PRACTICAL RECOMMENDATIONS FOR SHF RADIO RADIATION SOURCES COORDINATES POSITIONING BY AMPLITUDE METHOD V.А. Kozmin, V.А. Sladkih The results of research of rotation speed and diagram directivity width of the reception measuring antenna, speed of moving radio monitoring station on accuracy of SHF radio radiation sources coordinates positioning are described. Постановка задачи В настоящее время всё большее развитие получают радиосистемы сверхвысокочастотного (СВЧ) диапазона частот, в том числе системы спутниковой радиосвязи и вещания, системы передачи данных, радиорелейные системы и т.д., что повышает необходимость контроля радиочастотного спектра в этом диапазоне. Важнейшим аспектом контроля радиочастотного спектра является пеленгование и определение местоположения источников радиоизлучения (ИРИ). Измерительные станции радиоконтроля обычно оснащаются измерительными одноканальными приемниками с поворотными антеннами. Диапазон рабочих частот достигает 18 ГГц и выше. Такая аппаратура может использоваться в качестве амплитудного пеленгатора, она относительно недорогая по сравнению с автоматическими радиопеленгаторами, имеющими в своем составе сложные широкодиапазонные антенные решетки и многоканальные приемники. Целью настоящей работы является выработка практических рекомендаций по выбору скорости движения измерительной станции, скорости вращения и ширины диаграммы направленности измерительной антенны, необходимой для достижения достаточной в большинстве практических случаев точности локализации ИРИ. Амплитудный метод локализации ИРИ для измерительной станции с вращающейся антенной Определение координат ИРИ осуществляется путём пространственно-временной обработки результатов измерения амплитуд принимаемых сигналов. Структурная схема оборудования для локализации источников радиоизлучения приведена на рис.1. Z n , n An ( xˆ , yˆ ) n Рисунок 1. Структурная схема оборудования для локализации ИРИ Поворотное устройство вращает установленную на мачте автомобиля направленную антенну, которая преобразует электромагнитное поле в электрический сигнал. Цифровое радиоприемное устройство (ЦРПУ) выделяет, преобразует и усиливает полученный от антенны сигнал. На выходе ЦРПУ формируются отсчеты амплитуды измеряемого сигнала An , которые поступают в обработчик данных – персональную ЭВМ (ПЭВМ). Туда же от поворотного устройства передаются данные о положении максимума ДН антенны ( n ). От спутникового навигационного приемника на вход ПЭВМ поступает информация о текущем местоположении станции (координаты в комплекс ном виде Z n Yn i X n ) и ее курсе ( n ). Амплитудный метод локализации ИРИ основан на учете зависимости напряженности поля сигнала от расстояния до него [3]. Район возможного нахождения ИРИ разбивается на ячейки с координатами центра в комплексном виде z( x, y ) y i x . Шаг квантования координат определяется требуемой точностью и быстродействием. Амплитудный метод предполагает расчет функции q( x, y ) с последующим определением ячейки с ее максимальным значением ( xˆ, yˆ ) arg max (q ( x, y ) ) ; (1) 2 N 1 An wn ( x, y ) , q( x, y ) N n10 N 1 An 2 wn2 ( x, y) n 0 (2) n 0 где N – размер выборки измерений, wn ( x, y ) – расчетное значение множителя ослабления сигнала в n-ой точке приема при предполагаемом расположении ИРИ в точке ( x, y) . Множитель ослабления будем считать определенным с точностью до зависимости напряженности поля от расстояния до него, например, в соответствии с квадратичным приближением Введенского [4]. С учетом поворота приемной измерительной антенны множитель ослабления равен wn ( x, y ) | Z n z( x, y) |2 D( n ( x, y) n n ) , (3) где n ( x, y ) – направление из n-ой точки приема на ячейку с координатами ( x, y ) . Математическая модель В качества инструмента исследований в настоящей работе использовался пакет программ для анализа алгоритмов локализации, рассмотренный в [5]. Созданная математическая модель имитировала движение измерительной станции и воспроизводила процесс локализации ИРИ. При этом модель позволяла задавать произвольные виды диаграмм направленности приемной антенны, угловую скорость вращения, трек и скорость движения станции. Для расчета амплитуды сигнала в точке приема использовалась следующая формула [6]: 4 H h 60 P Dn (4) , E n ( x, y ) 2 Rn где P – мощность излучателя, Вт; Dn – коэффициент усиления антенны передатчика в направлении n-ого приемного пункта, раз; H и h – высоты подвеса передающей и приемной антенн соответственно, м; – длина волны излучения, м; Rn – расстояние от излучателя с координатами ( x, y ) до n-ого пункта с координатами ( xn , yn ) , м. Полагалось, что высоты антенн, мощность излучения и частота сигнала являются постоянными величинами. Уровень, ширина и расположение главного и боковых лепестков передающих антенн, как правило, априорно неизвестны, поэтому строгий учет данных величин затруднителен. Поэтому было использовано упрощение, согласно которому диаграмма направленности передающей антенны принималась круговой, а напряженность поля определялась как C En ( x, y ) 2 , C const . (5) Rn Для учета флуктуаций амплитуды сигнала использовался логарифмически нормальный шум [7] с единичным значением дисперсии и уровнем, определяемым отношением сигнал/шум H: E (6) E 'n ( x, y ) En n , H где – случайная величина с логнормальным распределением. С учетом значения диаграммы направленности в направлении на ИРИ результирующая амплитуда принимаемого сигнала для формулы (2) определялась как (7) An E 'n ( x, y) D( n n n ) , где n – истинный азимут на ИРИ из n-ой ячейки пространства. Результаты моделирования На рис. 2 построены распределения нормированных величин q( x, y ) согласно рассмотренной выше математической модели в виде изолиний. Использовалась ненаправленная антенна и направленная антенна с шириной диаграммы направленности 10°. Показаны также соответствующие изменения уровней сигнала вдоль трека. Исходные данные для моделирования принимались следующими: протяженность маршрута движения станции, показанного на рис.2 в виде линии, соединяющей точку А и Б, была равна 800 м, скорость движения станции 30 км/ч, скорость вращения антенны 9 град/с, темп измерений уровня – 100 отсчетов в секунду, отношение сигнал/шум 2. Район вероятного местоположения ИРИ (рабочая зона) задавался в виде прямоугольника размером 1.5×1.6 км. На рис.2 символом ′o′ отмечены расчетные координаты ИРИ, символом ′*′ – истинные координаты. В качестве зоны неопределённости выбрана область между источником и ближайшей к нему изолинией со значением q( x, y ) 0.9 . Как видим, область неопределенности для узконаправленной антенны значительно меньше, чем для ненаправленной, и координаты ИРИ определены более точно. а) антенна с круговой диаграммой направленности б) антенна с шириной диаграммы направленности 10° Рисунок 2. Распределение нормированных величин q(x,y) в рабочей зоне в виде изолиний (слева) и изменение уровня принимаемого сигнала (справа) Преимущество использования направленных приемных антенн для локализации ИРИ объясняется тем, что в этом случае местоопределение осуществляется не только за счет измерения уровня принимаемого сигнала вдоль трека, как для ненаправленной антенны, но и за счет пеленгования источника в тех точках, где максимум диаграммы направленности приемной антенны совпадает с направлением на ИРИ. Рассмотренные выше результаты не учитывают влияния многолучевости, свойственное реальным условиям распространения радиоволн. В действительности принимаемое электромагнитное поле является результатом сложения нескольких лучей, обу- словленных отражением волны от местных предметов. В результате направление прихода радиоволны не соответствует направлению на источник радиоизлучения. Поэтому в дальнейшем в данной работе влияние многолучевости учитывалось с помощью простой модели, согласно которой при расчете амплитуды сигнала (7) направление прихо- да волны t задавалось следующим образом: 10% азимутов соответствовали истинному направлению на ИРИ, остальные распределялись по равномерному закону в диапазоне от 0 до 360 градусов. Исследования проводились для двух маршрутов движения автомобиля, изображенных на рис.3, Г-образного и S-образного, характерных для движения по кварталам городской застройки. Длина треков составляла 1 км, минимальное расстояние до ИРИ – 500 м. Местоположение ИРИ на рисунках отмечено треугольником. Рисунок 3. Расположение трека автомобиля, рабочей области и координаты ИРИ Остальные условия были следующими: скорость движения станции – 30 и 60 км/ч, темп измерений – 100 отсчетов в секунду, отношение сигнал/шум – 2. Ширина диаграммы направленности по уровню 3 дБ принималась равной 120°, 60°, 10°. Угловая скорость вращения антенны задавалась 6, 24 и 48 град/с. Район вероятного местоположения ИРИ (рабочая зона) задавался в виде прямоугольника размером 1.5×1.6 км. Для накопления статистики для каждого случая проводилось по 1000 экспериментов. В качестве критерия оценки точности локализации выступали значения средней линейной ошибки Δ (расстояние между истинными координатами ИРИ и расчетными) и значение среднеквадратического отклонения линейной ошибки. На рис.4 построены полученные зависимости линейной ошибки локализации ИРИ от угловой скорости вращения антенны для Г-образного трека. Для сравнения на том же рисунке показано значение ошибки локализации для антенны с круговой диаграммой направленности. Выводы Полученные результаты позволяют выбирать диаграммы направленности, скорости вращения антенн, скорости движения станции. Например, для обеспечения точности локализации порядка 80-130 м при длине маршрута 1 км и скорости движения около 30 км/ч целесообразно использовать антенны с шириной ДН не более 60°, при этом скорость вращения должна не менее 40 град/с. а) скорость движения – 30 км/ч б) скорость движения – 60 км/ч Рисунок 4. Зависимость линейной ошибки локализации ИРИ от угловой скорости вращения при разной ширине ДН антенны (1 – круговая ДН, 2 – ширина ДН 10°, 3 – ширина ДН 60°, 4 – ширина ДН 120°) для Г-образного трека Для S-образного трека результаты моделирования показаны на рис.5. а) скорость движения – 30 км/ч б) скорость движения – 60 км/ч Рисунок 5. Зависимость линейной ошибки локализации ИРИ от угловой скорости вращения при разной ширине ДН антенны (1 – круговая ДН, 2 – ширина ДН 10°, 3 – ширина ДН 60°, 4 – ширина ДН 120°) для S-образного трека С увеличением скорости вращения направленных антенн ошибки локализации приближаются к значениям ошибок, полученным для ненаправленной антенны. При этом использование антенны с более узкой диаграммой дает лучшие результаты. Увеличение скорости вращения при высоком темпе измерений эквивалентно использованию ненаправленной антенны, и местоопределение преимущественно происходит за счет общего изменения амплитуды сигнала по маршруту движения станции. Несмотря на выигрыш ненаправленной антенны в точности локализации, следует иметь в виду, что ненаправленная антенна в диапазоне СВЧ уступает в эффективности направленной антенне на 10-15 дБ, поэтому ее применение для обнаружения слабых сигналов может оказаться неэффективным. С уменьшением скорости движения станции ошибки локализации уменьшаются за счет увеличения накопленного объема измерений. При ограничении на скорость вращения антенны и скорость движения автомобиля точность локализации можно увеличить за счет повышения темпа измерений или удлинения маршрута движения станции. Список библиографических источников 1. Рембовский А.М., Ашихмин А.В., Козьмин В.А. Радиомониторинг: задачи, методы, средства/ Под редакцией А.М. Рембовского.– М: Горячая линия –Телеком. 2006. 2. Каталог ИРКОС. 2010. Технические средства радиомониторинга. М.: ЗАО ИРКОС, 75 с. 3. Козьмин В.А., Савельев А.М., Уфаев В.А., Чубов Е.А. Сравнение методов местоопределения источников радиоизлучения // Специальная техника. 2007. №1. С. 3038. 4. Долуханов М.П. Распространение радиоволн. Учебник для вузов. М., “Связь”, 1972. 5. Козьмин В.А., Сладких В.А., Мякинин И.С. Математическая модель для исследования алгоритмов пеленгования и локализации источников радиоизлучения мобильной станцией радиомониторинга // Антенны. 2009. №5 6. Уфаев В.А., Афанасьев В.И., Разиньков С.Н. Оценка координат источника радиоизлучения на основе измерений амплитуды электромагнитного поля // Радиотехника. 2003. №10. С.71-73. 7. Куликов А. Н., Лавренков Ю. В., Пономарев Г. А., Сильвинский С. В. Ослабление и рассеяние ультракоротких радиоволн в городах и пригородных зонах // Итоги науки и техники. Сер. Радиотехника. М.: ВИНТИ. 1991. Т. 42.