Разработка модели течения жидкости при бурении скважин с
advertisement

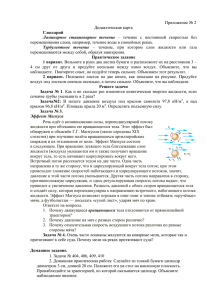
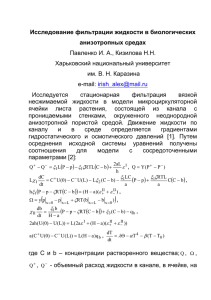
МИНОБРНАУКИ РОССИИ Санкт-Петербургский политехнический университет Петра Великого Институт прикладной математики и механики Кафедра теоретической механики Работа допущена к защите Зав. кафедрой, д.ф.-м.н., проф. __________ А. М. Кривцов "__"___________________ ДИССЕРТАЦИЯ на соискание академической степени МАГИСТРА Тема: Разработка модели течения жидкости при бурении скважин с управляемым давлением Направление: 010800 – Механика и математическое моделирование Выполнил студент гр. 63604/1 Ершов Д.С. Руководитель к.ф-м.н. Ле-Захаров А. А. Консультант по вопросам охраны труда: заместитель заведующего кафедрой БЖД по учебной работе Монашков В. В. Санкт-Петербург 2015 Оглавление I. Введение .....................................................................................................................................3 1.1. Метод бурения с управляемым давлением ..................................................................3 II. Основная часть .......................................................................................................................5 2.1. Постановка задачи ............................................................................................................5 2.2. Математическая модель ..................................................................................................6 2.2.1. Течение жидкости в одномерном трубопроводе.......................................................6 2.2.2. Поглощение и приток ..................................................................................................9 2.2.3. Работа клапана ............................................................................................................11 2.2.4. Компенсация давления в случае поглощения и притока .......................................13 2.2.5. Временная корректировка .........................................................................................15 2.3. Экспериментальный стенд ...........................................................................................17 2.3.1. Разработка стенда .......................................................................................................17 2.3.2. Контроль параметрических данных и управление .................................................20 2.4. Программа управления давлением .............................................................................21 2.4.1. Алгоритм описания экспериментального стенда с применением математической модели ...................................................................................................................................21 2.4.2. Давление и скорость ..................................................................................................24 2.4.3. Измерение пропускной способности клапана и нахождение коэффициента пропорциональности ............................................................................................................25 2.4.4. Алгоритм управления давлением и программная реализация ..............................26 2.4.5. Экспериментальное моделирование поглощения и притока .................................27 2.5. Тестирование программы управлением давления ..................................................28 III. Заключение ..........................................................................................................................30 IV. Список литературы ............................................................................................................31 Приложение 1. Безопасность жизнедеятельности при разработке стенда, содержащего систему с электрифицированными узлами управления и рабочего места оператора ЭВМ ...............................................................................................................33 2 I. Введение 1.1. Метод бурения с управляемым давлением Процесс бурения скважин – это сложный многоэтапный процесс, занимающий важнейшее место в технологической цепочке строительства скважин. Наиболее перспективной технологией для бурения интервалов с узким окном бурения, разницей градиентов порового/пластового давлений и давления гидроразрыва является бурение с управляемым давлением, либо MPD (Managed Pressure Drilling). MPD представляет собой настраиваемый процесс, позволяющий осуществлять точный контроль давления в затрубном пространстве по всей длине скважины [4]. Данный подход позволяет снизить риски при бурении, повысить его эффективность, а также бурить ранее не подлежащие разбуриванию скважины. Среди основных преимуществ бурения под контролем давления можно назвать улучшение параметров процесса бурения за счет применения замкнутого контура, а также контроль основных параметров системы, таких как противодавление, плотность флюида, реологические свойства флюида, уровень флюида в затрубном пространстве, потери циркуляционного давления на трение в затрубном пространстве. Управляемый клапан Буровой насос Буровая колонна Насос обратного давления Затрубное пространство Рисунок 1. Схема бурильной установки, , расходы на буровом насосе, на насосе обратного давления, на управляемом клапане. 3 Также MPD позволяет быстрее принимать корректирующие меры при появлении поглощений и вбросов за счет контроля давления. Схематичное представление технологии MPD изображено на рис. 1. В процессе бурения, буровой раствор подается под давлением в бурильную колонну и попадает через промывочные отверстия долота в забой скважины. После этого буровой раствор вместе со шламом поднимается по затрубному пространству на поверхность, где осуществляется контроль давления в требуемом диапазоне. Давление в системе играет определяющее значение и имеет строгие границы. С одной стороны, оно должно превышать поровое давление, чтобы избежать нежелательного притока из окружающих формирований скважины. С другой стороны, давление должно быть ниже давления, при котором произойдет разрушение скважины [4]. Для контроля давления в затрубном пространстве используется управляемый клапан (“choke”), который устанавливается в замкнутом контуре на узле вывода бурового раствора из затрубного пространства вместе с насосом обратного давления. Это позволяет практически мгновенно менять профиль давления, при этом, не меняя плотность бурового раствора. Стандартная система MPD включает в себя роторный устьевой герметизатор, замкнутый трубопровод, штуцерный манифольд (в составе которого находится управляемый клапан и кориолисов расходомер), а также систему автоматического управления [2]. Анализ статей по тематике бурения с управляемым давлением показывает, что в большинстве случаев, исследования ведутся в крупных нефтесервисных компаниях, таких как Weatherford, Schlumberger, Halliburton. В связи с этим, особенности модели описания течения, а также алгоритмы управления и другая информация являются засекреченными и статьи содержат только общую информацию и общие результаты исследований – [4], [15], [16]. Эти статьи рекламируют готовые к использованию установки для бурения с контролем давления. Основной акцент сосредоточен на программируемых логических контроллерах, а также пользовательских интерфейсах с удобным и безопасным управлением. Также существует ряд статей, которые дают более детальное описание метода MPD и описывают ряд преимуществ – [3], [6], [8]. Однако, на ряду с рекламными статьями, данные работы не дают информации о существующих недостатках и проблемах метода. Больший интерес представляют статьи более узкой направленности, например, посвященные разработке сложных математических моделей течения бурового раствора в скважине. В работе [9] для описания динамики жидкости в затрубном пространстве предложено описывать течение жидкости системой уравнений в частных производных и использовать метод конечных объемов. Такой подход позволяет получить точное аналитическое значение для давлений в системе, и, как результат, разработать более 4 чувствительный контроллер. Отдельная группа статей посвящена алгоритму управления клапаном. В статьях [1], [2], [11] предложены и реализованы схемы получения, обработки информации, сценарии работы логического контроллера в зависимости от полученной информации, приведены результаты сходимости схем, а также варианты регуляторов для управления клапаном. На основе анализа статей был сделан вывод об основных проблемах метода MPD. Во-первых, существует неопределенность состояний системы на некоторых участках, из-за этого становится невозможным измерить параметры системы и корректно воздействовать на нее. Во-вторых, не смотря на разработку сложных математических моделей, при помощи которых можно оценивать давление в забое скважины, реальная скорость получения данных о давлении в забое является очень низкой. В-третьих, серьезной проблемой MPD является нестабильность системы при появлении двухфазной среды (появление воздуха в затрубном пространстве). Одним из нерешенных вопросов MPD можно отметить высокую стоимость и большую площадь исследовательских и учебных стендов метода бурения с контролем давления [10]. Данная работа посвящена изучению течения жидкости при бурении методом с управляемым давлением. В основной части работы будет разработана математическая модель описания течения жидкости в замкнутом трубопроводе, а также описаны случаи притока и поглощения жидкости в системе. Будет построен экспериментальный стенд с заданными техническими характеристиками и введены поправки и допущения в рамках данного исследования. Далее будет сделан подбор и подключение контрольноизмерительной аппаратуры установки и разработаны алгоритмы получения информации о состоянии системы. На завершающем этапе исследования необходимо провести анализ математической модели и экспериментальных данных, а также же реализовать программу управляемого клапана для случаев притока или поглощения жидкости. II. Основная часть 2.1. Постановка задачи В ходе изучения статей по теме MPD, было нетрудно найти существенное количество примеров разработки и создания тестовых установок, моделирующих процесс бурения с управляемым давлением. Данные установки могут быть использованы в исследовательских целях, а также в целях обучения персонала. Однако в этих случаях в качестве основных элементов цепочки MPD используется то же оборудование, что и на местах бурения, в том числе манифольды и датчики. В связи с этим, подобные установки 5 занимают большую площадь (20-30 кв.м.), являются ресурсозатратными и стоимость таких установок может составлять несколько миллионов долларов, в тоже время модификация установки для расширения области исследований требует целого ряда согласований и является дорогостоящей. Постановка задачи данной работы сводится к разработке математической модели, описывающей течение жидкости в замкнутом трубопроводе. Требуется разработать математическое описание случаев притока, либо поглощения жидкости. В результате необходимо написать алгоритмы и создать программу контроля давления в системе. Для решения задачи необходимо разработать установку, моделирующую процесс течения бурового раствора, а также обладающую следующими свойствами: компактность, мобильность, экономичность. Создание такого стенда сделает возможным проведение безопасных недорогих исследований технологии MPD в лабораторных условиях. Преимуществом проекта является собственная математическая модель, а также модифицируемый стенд, что позволит расширять круг решаемых задач по мере необходимости. Более того, одной из отличительных черт стенда является моделирование райзера из прозрачного материала. 2.2. Математическая модель 2.2.1. Течение жидкости в одномерном трубопроводе Для реализации управления давлением в системе важно понимать, какое давление должно быть на каждом участке цепи в теории. Программируемый логический контроллер MPD производит корректировку давления в затрубном пространстве, в том числе на основе сравнения данных с датчиков с аналитическими значениями. Поэтому в первую очередь необходимо построить математическую модель течения жидкости. Учитывая качественный характер исследования на данном этапе изучения бурения с управляемым давлением, для описания гидравлики мы можем принять в использование уравнения низших порядков, сделав акцент на подробное описание течения и потерь для каждого участка цепи уравнениями гидравлики. Для моделирования бурового раствора (реальная плотность 900- 1500 ) будет использоваться вода с плотностью и кинематической вязкостью при температуре 20о: м с . 6 Для описания движения жидкости будет использоваться закон сохранения энергии для потока идеальной несжимаемой жидкости (1), а также уравнение непрерывности потока (2) [5]: V 2 p gh const 2 V1S1 V2 S 2 (1) (2) В уравнении (1): V- Скорость потока, p – давление, S – площадь рассматриваемого сечения, h – высота, на которой рассматривается данный элемент жидкости, g- ускорение свободного падения, – плотность жидкости. В уравнении (2): V1 и V2 – скорости в различных сечениях 1 и 2, S1 и S2 – площади различных сечений 1 и 2. В таком виде данные уравнения для реальной жидкости будет применять некорректно из-за наличия сил внутреннего трения, из-за которых на различных участках трубопровода будут происходить потери давления. Поэтому для учета таких потерь, зная вязкость воды и свойства шероховатости труб, мы будем рассчитывать сопротивления. Рассчитав сопротивление последовательно для каждого участка, можно сделать вывод о давлении в любой точке системы. Значение входного давления, которое берется за основу для последующего расчета системы, будет получено с датчика давления, установленного на входной трубе. Скорость потока на каждом участке цепи будем определять при помощи показаний с датчика расхода жидкости, установленного также в начале цепи, используя расход Q [ ], по формуле (3). V 4Q d2 , d - диаметр трубы (3) Рассмотрим случай, когда происходит потеря давления по длине трубопровода. Если сечение трубы неизменно, то скорость потока также одинакова и кинетическая энергия потока остается неизменной. Идет потеря статического давления. Формула для расчета потери давления по длине будет пропорциональна квадрату скорости потока [12]: L p V 2 d 2 В формуле (4): скорость потока, - формула Дарси- Вейсбаха (4) – потеря давления, L – длина участка, d – диаметр трубы, V- - коэффициент гидравлического трения. 7 Re Vd , где - кинематическая вязкость жидкости (5) Данный коэффициент можно определить из формул, которые зависят от числа Рейнольдса (5) и коэффициента шероховатости труб представлены в таблице 1 [8]. . Формулы для вычисления Следует обратить внимание, что скорость потока в установке будет отличаться в зависимости от участка, соответственно, с изменением числа Рейнольдса может произойти смена режима движения жидкости (например, с турбулентного на ламинарный), что также должно быть учтено в модели. Коэффициент шероховатости в задаче принят м и соответствует коэффициенту шероховатости полипропиленовых труб. Таблица 1. Определение коэффициента гидравлического трения Помимо потерь давления по длине также нужно учесть потери давления на местных сопротивлениях, такие как смена направления течения, расширение или сужение течения. Местными потерями давления называют затраты удельной механической энергии, обусловленные работой сил трения и вихреобразованием на преодоление потоком жидкости местного сопротивления. На поддержание вихрей в определенной зоне затрачивается энергия потока. Для описания потери давления на местных сопротивлениях будет использоваться формула предложенная Вейсбахом (6)[12]: 8 p V 2 , - коэффициент сопротивления (6) 2 В уравнении (6): ∆p – потеря давления, V- скорость потока, ρ- плотности жидкости. Коэффициент зависит от вида местного сопротивления. В экспериментальном стенде присутствуют самые распространенные местные сопротивления, для которых известны формулы вычисления потери давления: внезапное сужение (7), внезапное расширение (8), смена направления течения (9)[12]. (1 S 2 S1 ) , S1/S2 – площади соответственно до/после сужения (7) 2 (1 S 1 S ) 2 , S1/S2 – площади соответственно до/после расширения (8) 2 (0.31 0.16(d / R)3.5 ) 90 , R – радиус скругления угла поворота, - угол поворота Формула (9) справедлива только в случае, если d 2R 5d , (9) это условие выполняется в нашем случае. Таким образом, мы определили гидравлическую стационарную модель потока жидкости в одномерном трубопроводе. 2.2.2. Поглощение и приток Рассмотрим схему на рисунке 2. В случае, когда площадь сечения отверстия поглощения S0 = 0, скорости потоков в стволе скважины и на выходе из райзера совпадают V1S1=V2S2. Это обусловлено законом сохранения массы и подтверждается аналитической моделью. Когда в системе появляется поглощение (S0 ≠ 0), в забое появляется потеря давления на отверстии, которая характеризуется площадью сечения и скоростью проходящего через нее потока. Используя закон сохранения массы, можно записать скорость поглощения через известные скорости V1 и V2. 9 V0 S0 V1 S1 V2 S 2 V0 - скорость поглощения V1 S1 V2 S 2 S0 (10) 2 V2 S 2 V1S1 1 3 Поглощение: Рисунок 2. Моделирование поглощения жидкости Таким образом, зная разность динамического давления (определяется по датчикам расхода), можно определить потери давления в забое и скомпенсировать их. Перед тем, как перейти к описанию компенсации давления в забое при поглощении, необходимо дать качественную оценку скоростям V1 и V2. Рассмотрим рис.2. Очевидно, что скорость в сечении 2 по сравнению со скоростью в сечении 1 снизится при появлении V0. Для оценки скорости V1 запишем уравнение Бернулли для сечений 1 и 3 до появления поглощения и после: V012 p01 p03 2 V03 2 V12 p01 p03 2 2 - до появления поглощения (11) - после появления поглощения При появлении поглощения появляется динамическая составляющая в правой части уравнения Бернулли, учитывая, что статическое давление в левой части не меняется, должна возрастать V1. 10 Чтобы удержать давление в забое на одном уровне, даже при появлении поглощения, необходимо восполнять потерянное количество жидкости в затрубном Qотто Q1 Q2 пространстве. Согласно закону сохранения массы - именно такое количество жидкости необходимо подавать в забой, пока не будет устранено поглощение. Теперь рассмотрим противоположный случай (рис.3). В случае притока жидкости закон сохранения будет выглядеть следующим образом: V2 S2 Vo So V1S1 (12) Из формулы соотношения скоростей видно, что будет происходить увеличение скорости выходного потока, динамическое давление в забое возрастет. Для анализа компенсации возникшей разности давлений можно воспользоваться соотношением (12). По аналогии со случаем поглощения, пропорциональный регулятор будет изменять положение заслонки дросселя управляемого клапана. 2 V2 S 2 V1S1 1 Приток: Рисунок 3. Моделирование притока жидкости 2.2.3. Работа клапана Управляемый клапан – важнейший элемент при бурении с управляемым давлением. Логический контроллер, получая информацию о состоянии скважины , и, сравнивая ее с теоретическим давлением из математической модели , принимает решение о том, нужно ли увеличивать или уменьшать давление в затрубном пространстве. Исходя из этого решения, происходит либо поворот на открытие клапана, либо наоборот. 11 В данной работе будет вестись оценка скорости на выходе из райзера, соответственно и (скорость до появления изменения количества жидкости и после). В случае, когда в системе нет притока/поглощения, эти скорости равны. В случае, когда в системе будет происходить изменение количества жидкости, данные показатели будут меняться. В зависимости от характера изменения скоростей, будет происходить изменение положения заслонки клапана. Введем безразмерный коэффициент регулятора: k (vвых0 vвых1 ) (13) В формуле (13): k [c/м] – это коэффициент усиления пропорциональной составляющей, - выходной безразмерный сигнал регулятора. В нашем случае - это угол поворота шагового двигателя. Если =0 – клапан полностью открыт, если =3100 – полностью закрыт. Диапазон [0:3100] был определен в результате калибровки управляемого клапана. Рисунок 4. Моделирование управляемого клапана с использованием шарового крана и шагового двигателя. Единственная сложность данного решения связана с подбором коэффициента k. Также стоит обратить внимание на то, что пропорциональный регулятор не сможет дать абсолютно точное значение для корректировки и требуемое давление будет получено с определенной погрешностью. Для управляемого клапана в логическом контроллере прописано два сценария на открытие и закрытие. 12 2.2.4. Компенсация давления в случае поглощения и притока Компенсация давления при поглощении производится двумя одновременными процедурами: поворот заслонки управляемого клапана и подача жидкости в забой с заданной скоростью при помощи насоса обратного давления, а компенсация давления при притоке происходит только за счет управляемого клапана. Рассмотрим порядок работы насоса обратного давления при появлении поглощения (рис.5). Насос обратного давления Vback V2, S2 V1S1 1 Рисунок 5. Схема работы насоса обратного давления. Было получено, что при появлении поглощения жидкости, для сохранения давления необходимо сообщить забою дополнительную скорость потока, равную скорости на поглощении. Скорость поглощения приведена в (10). Скорость потока насоса обратного давления, при условии, что рабочие сечения труб за затрубным пространством совпадают: Vback (V2 Vо Sо ) S2 (14) Подставляя в (14) формулу (10), получаем: Vback 2V2 V1 S1 S2 (15) Используя формулу (15), зная входной и выходные потоки, можно прецизионно компенсировать поглощение, возникающее в забое. В этом случае происходит компенсация динамическим давлением. Теперь рассмотрим принцип действия управляемого клапана (рис.6). 13 2д 2 V2, S2 Vд, Sд Дроссельная заслонка Рисунок 6. Схема для описания управляемого клапана Рассмотрим закон сохранения для сечений 2 и 2д. В случае, когда нет поглощения, V2S2=VдSд. Отсюда выразим скорость в сечении 2: V2 Vд Sд S2 (16) Когда появляется поглощение, скорость в сечении 2 падает (было показано ранее). Но, чтобы давление в забое сохранялось, необходимо поддерживать скорость на постоянном уровне, то есть скорость в сечении 2 и 2д должна быть постоянной. Получается, что контролировать скорость V2 можно, изменяя рабочее сечение трубы. S2 – постоянная, таким образом, меняется Sд. Контроль осуществляется за счет увеличения статического давления. Чем больше потери скорости, тем меньше необходимо сделать площадь сечения на клапане (осуществить поворот на закрытие дроссельной заслонки), чем больше увеличение скорости, тем больше необходимо сделать площадь сечения на клапане (осуществить поворот на открытие дроссельной заслонки) этот вывод можно сделать из анализа соотношения (16). В пункте 2.2.3. был приведен общий вид регулятора для управления клапаном. Теперь, измерив пропускную способность клапана (KV-хара теристи у) в зависимости от степени открытия, и, измеряя значения скорости на выходе из райзера, можно будет подобрать коэффициент пропорциональности, таким образом регулировать давление в забое при помощи управляемого клапана. Стоит отметить, что при существенных потерях на поглощении, управляемого клапана будет недостаточно и необходимо будет задействовать насос обратного давления. 14 2.2.5. Временная корректировка В работе описание корректировки давления ведется с использованием уравнений для стационарного потока жидкости. Следует понимать, что в реальном случае невозможно моментально изменить состояние системы. Скорость и давление будут меняться с определенной задержкой. Назовем эту задержку временем корректировки tкорр. Рассмотрим случай, когда происходит поглощение жидкости (рис.7). В этом случае скорость поглощения будет определяться из уравнения (10). С другой стороны, при появлении поглощения, давление в райзере будет падать. Можно записать: Vо So S riser p' g (17) Pзабой Поглощение V0 S0 ∆p Рисунок 7. Потеря давления при поглощении в забое. В уравнении (17) Sriser – площадь сечения райзера, p′ – скорость изменения давления в райзере. Данное соотношение можно записать только при условии, что полное давление в системе намного больше, чем изменение давления на поглощении: p 1 p забой (18) Для получения времени корректировки введем допущение, что скорость истечения жидкости при поглощении определяется по формуле Торричелли: Vо 2 pзабой (19) 15 Подставляя (19) в (17), получаем: p p' S riser 2 g S0 Получаем дифференциальное уравнение (20): p '2 ( S0 2 ) 2 gp S riser (20) Нахождение константы в данном уравнении происходит из начального условия p (0) pзабой Решение дифференциального уравнения можно записать следующим образом: p 0.25(t 2 4 pзабой t 4 pзабой ) (21) S0 2 S riser g Воспользуемся неравенством (18) и помножим его на p p забой t t t : p забой p' В результате получаем время корректировки: t S riser pзабой S0 g 2 (22) Необходимость во введении и оценке данного параметра заключается в необходимости отслеживать время реакции системы на изменение давлений и принятие решений. Если совокупное время получения информации с датчиков, работы алгоритма и задержки управляющих сигналов будет больше чем , то программа будет работать некорректно и получить сходимость будет сложнее. 16 2.3. Экспериментальный стенд 2.3.1. Разработка стенда Исходя постановки задачи (п.2.1.), было принято решение разрабатывать установку, имеющую следующие технические параметры: Площадь установки 2-4 м2 Максимальная высота 2.5 м Высота прозрачной трубы, моделирующей райзер, не менее 2 м Герметичность системы трубопровода, рабочее давление 1бар Максимальное давление 1.5 бара Наличие узлов для установки измерительного оборудования и управляемого клапана, а также узла подвода/отвода жидкости (воздуха) для моделирования рабочего процесса. Схема установки представлена на рис.8. В качестве основного материала конструирования трубопровода был выбран полипропилен. Полипропиленовая труба d=13мм Акриловая прозрачная труба d=144 мм Выходящий поток Входящий поток B E Рисунок 8. Схема экспериментальной установки. 17 Для создания прозрачного райзера было использовано акриловое стекло. Для данных материалов известны точные значения шероховатости, это упростит вычисления гидравлической модели. Рабочий диаметр трубопровода 13 миллиметров, рабочий диаметр райзера 144 мм. Фактическая площадь установки составляет 2 м2, высота райзера 2000 мм, общая длина трубопровода составляет около 10 метров. Все фитинги и переходники подобраны таким образом, что рабочий диаметр практически не меняется по длине, кроме тех мест, где это предполагается. Все изгибы трубопровода выполнены под углом 90о и выполнены из уголков с одинаковыми характеристиками (радиус скругления). Для моделирования бурового раствора в данной установке предлагается использовать воду из водопроводной сети. На рис.8. представлены основные узлы установки оборудования: В – расходомеры С – аналоговые датчики давления , D – управляемый клапан, Е – узел подвода/отвода жидкости или воздуха в системе. Отдельно необходимо указать на особенности, отличающие данную установку от классических установок MPD, а также особенности конструкции. Первым качественным отличием является рабочее давление в системе, которое может составлять до 0.8 атмосфер (в реальности давление может составлять 200 бар). Изначально планировалось организовать циркуляцию воды в установке при помощи погружного, либо проточного насоса, установив его в начало трубопроводной сети, как это представлено на рис.1. Рисунок 9. Демонстрационный стенд MPD: CAD-модель слева, фотография установки справа. 18 В связи с этим, на CAD- модели (рис.9) можно увидеть емкость для жидкости (бочку), которая моделирует резервуар с буровым раствором. Пройдя цикл, вода снова оказывается в резервуаре, количество жидкости в системе в этом случае не меняется (в стационарном режиме). Однако, в ходе экспериментальных измерений, было принято решение на время отказаться от использования погружного насоса из-за недостаточного давления в системе ( максимальное давление имеющегося погружного насоса – 0.3 бар). Для работы с датчиками в цепи трубопровода и разработки алгоритма было принято решение напрямую подавать на вход воду из сети водоснабжения (герметично), отвод воды осуществлять в сливы сети водоснабжения. Преимущество данного подхода заключается в постоянном «обновлении» жидкости в цикле, а также в повышенном давлении в сети водоснабжения, которое составляет до 2 бар. Необходимо отметить, что установку в любой момент можно сделать полностью независимой от водопроводной сети, вернувшись к варианту с погружным насосом и резервуаром. Второй особенностью являются отличия контрольных узлов: датчиков давления, расходомера. В теории нам необходимо знать давление на входе, выходе, а главное- в забое скважины. Именно в этих узлах установлены датчики давления в нашей системе. На практике [10] полезно контролировать давление по всему затрубному пространству, для этого возможна установка практически любого количества датчиков по мере необходимости. Расход жидкости в разрабатываемой установке будет измеряться при помощи 2 счетчиков воды, работающих по тахометрическому принципу, в рамках этой работы точности показаний таких счетчиков будет достаточно, однако в реальных манифольдах MPD используется массовый расходомер. Последним, но не маловажным отличием установки является отсутствие насоса обратного давления перед управляемым клапаном. Данное устройство, в случае падения давления в затрубном пространстве используется для компенсации потерь давления и работает совместно с управляемым клапаном. Подводя итог, можно сказать, что на собранной установке можно проводить измерения на низких давлениях, вести работу по разработке алгоритма управления клапаном, проводить приток/поглощение контрольные жидкости. измерения Впоследствии давления, концепция а также стенда моделировать предусматривает замену/добавление перечисленного выше недостающего оборудования. Перед тем, как перейти к описанию установки при помощи математической модели, осталось дать описание электрической схемы и контроллера, с помощью которых будет осуществляться обмен данными со стендом. 19 2.3.2. Контроль параметрических данных и управление Ранее уже говорилось о том, что в системе будут использованы цифровые и аналоговые датчики, которые будут отправлять данные на обработку. В системе установлены аналоговые датчики давления с диапазоном измерения от 0 до 25 бар (рис.10а) и питающим напряжением 12В, импульсные счетчики воды (рис.10б), которые передают импульс при протекании 1 и 10 л жидкости, а на шаровом кране установлен и закреплен с помощью эластичной муфты шаговый двигатель FL56STH76-2808A (рис.10в) с питающим напряжением 24В. а) б) в) Рисунок 10. а – датчик давления, б- счетчик воды, в – шаговый двигатель. Для управления этими элементами было принято решение использовать микроконтроллер на базе микропроцессора ATmega328. Микроконтроллер позволяет произвести одновременное подключение всех элементов, а главное, производить быстрый прием и обработку сигнала и отправлять ее в COM-порт. На рис. 11 представлена схема, по которой будет реализовано управление в системе: D – шаговый двигатель, С – датчики давления, B- счетчик воды. B Выход Программа COM порт Вход Рисунок 11. Схема подключения датчиков и контроллера. B- датчики расхода, C- датчики давления, D- управляемый клапан. 20 Также на схеме указано взаимодействие контроллера с программой, реализованной в интерпретаторе Python. Описание взаимодействия будет описано позже. 2.4. Программа управления давлением 2.4.1. Применение модели течения жидкости к описанию экспериментального стенда Необходимо проанализировать аналитическую модель течения жидкости на примере собранного экспериментального стенда, построив зависимость падения давления по длине трубопровода, а также оценить скорости и виды потоков на участках. Рассмотрим случай, когда входное давление составляет 1.5 бара. При этом расход жидкости примем 0.0002 . В реальном случае данные показания будут считываться с датчиков, установленных в начале цикла, сейчас они задаются программно. Перейдем к анализу алгоритма, пошагово вычисляющего давление и скорость на каждом участке. Значения давления и скорости потока на входе трубопровода становятся известны с датчиков. Далее, используя формулы (1) и (2) идет расчет давления и скорости для следующего участка. В зависимости от типа нового участка рассчитывается сопротивление по формуле (4), либо (6). В результате, скорость и давление на каждом участке установки можно рассчитать по (23). pi pi 1 pi (23) vi vi 1 vi В (23): i- текущий участок, (i-1)- предыдущий участок. Давление и скорость во всей системе вычисляются при помощи основного цикла, количество проходов которого определяется количеством узлов в установке (n). На рис. 12 приведена схема установки с нумерацией узлов. В зависимости от типа местного сопротивления текущего узла происходит выполнение соответствующей функции на вычисление потери давления, либо скорости. Схема алгоритма вычисления представлена на рис. 13. Таким образом, на выходе из цикла мы получаем значения давлений и скорости в любой точке трубопровода экспериментального стенда. 21 Рисунок 12. Схема установки с нумерацией и описанием узлов. Начальные условия: Контроллер p[0], V[0] A[n], p[0],v[0] i=[1:n] p[n], v[n] если (i=n) A[i], p[i],v[i] (i<n) Потери по A[i]=2 длине A[i]=1 If A[i] = 3 Местные потери Сужение/ расширение p[i]= p[i-1]V[i]=V[i-1]- Рисунок 13. Схема алгоритма вычисления аналитических значений давления и скорости. Вывод результатов описания течения жидкости в экспериментальном стенде при помощи математической модели в статическом случае представлен на рис. 14. Данные графики показывают изменения значений полного давления в местах перепада высоты, а 22 также видны потери давления на сопротивлениях. Резкое изменение скорости происходит в момент резкого расширения трубы и смены направления течения. Именно этот узел (на рис.12 №14) моделирует выход бурового раствора из буровой колонны и переход в затрубное пространство. Также был проанализирован режим протекания жидкости. Рисунок 14. Распределение давление и скорости по длине трубопровода. В системе преимущественно наблюдается турбулентное течение, кроме области расширения (райзер), там скорость потока существенно падает и там течение является ламинарным (Рис.15). Рисунок 15. Ламинарное течение в райзере. 23 2.4.2. Давление и скорость В бурении с управляемым давлением, зная входное давление и расход, давление перед управляемым клапаном, а также потери давления по длине затрубного пространства, можно оценивать давление в забое скважины, опираясь на математическую модель. Однако в ходе подготовительных работ был сделан вывод, что перепад рабочего давления отслеживать при помощи датчиков давления невозможно даже на качественном уровне. Это вызвано с одной стороны малозаметным изменением значения давления (несколько сотен Паскаль), с другой стороны низкой чувствительностью аналоговых датчиков давления (рис.16). В связи с этим, было принято решение оценивать только динамическое давление в системе при помощи 2 датчиков расхода воды. Как было показано в аналитической модели, скорость по длине трубопровода в статическом случае остается неизменной. Но при появлении притока, либо поглощения, происходит изменение скоростей. Необходимо получить и сравнить входную и выходную скорости потока для случаев поглощения количества жидкости в забое и для случаев притока жидкости. На основе полученных значений станет возможным произвести настройку конечного логического контроллера и подобрать коэффициент для пропорционального регулятора для управления клапаном. В экспериментальном стенде предусмотрен узел для притока/поглощения жидкости в системе (обозначен буквой «Е» на рис.8). Он расположен в основании райзера и служит для моделирования процесса, при котором в скважине происходит резкое изменение давления, фактически моделируя приток Давление, бар мелкозалегающих вод, либо поглощение бурового раствора в забое. P в забое Входное P P перед клапаном Время, с Рисунок 16. Показания датчиков давления в гидростатическом случае 24 2.4.3. Измерение пропускной способности клапана и нахождение коэффициента пропорциональности 0,00025 Начальное положение заслонки 0,0002 Q, м3/с 0,00015 0,0001 Q Аппроксимация 0,00005 0 0 10 20 30 40 50 60 70 80 90 100 -0,00005 Степень закрытия заслонки, % Рисунок 17. Пропускная способность клапана. В ходе работы было проведено экспериментальное исследование пропускной способности управляемого клапана в зависимости от степени его закрытия. Шаг изменения положения дроссельной заслонки составляет 0.1. График получившейся зависимости представлен на рис. 17. Из получившегося результата можно найти полиномиальную зависимость изменения положения дроссельной заслонки управляемого клапана от изменения скорости потока жидкости. Тогда формулу (13) можно переписать как (24). k1 (V22 V12 ) k2 (V2 V1 ) В формуле (24): (24) V2 и V1 [ /с] - скорости выходного потока после и до появления притока/поглощения, k1 [c2/ 2] = -881.95 и k2 [c/ ] = 132.37 – коэффициенты регулятора. - безразмерный коэффициент, сигнал поворота на требуемый угол. Начальное положение дроссельной заслонки играет важную роль, так как возникает необходимость корректировать давление как в большую, так и в меньшую стороны. Из анализа графика на рис. 17 было решено принять 65% степень закрытия клапана за исходное положение. Данное решение принято из возможности увеличивать или уменьшать расход в 2 раза по необходимости. 25 2.4.4. Алгоритм управления давлением и программная реализация Выбирая платформу для реализации математической модели, алгоритма получения данных с датчиков, а также алгоритма управления давлением с последующей графической визуализацией результатов и построения сравнительных графиков, было принято решение работать с интерпретатором Python. Из основных преимуществ Питона можно выделить: хорошая скорость обработки, возможность решать сложнейшие задачи благодаря большому количеству специализированных библиотек, удобочитаемость кода и удобство в изучении. Также интерпретатор позволяет работать с COM-портом (в нашем случае микроконтроллера ATmega328, принимающего информацию с датчиков) и весьма удобно обрабатывать данные. Код возможно будет использовать при создании программируемого логического контроллера (PLC) и пользовательского интерфейса (HMI). Алгоритм реализованной в Python программы управления давлением в забое представлен на рис. 18. В начале программы происходит считывание с контроллера информации о начальном давлении и скорости в системе. Эта информация используется для расчета аналитических значений скорости и давления Vаналит и pаналит , а также для определения режима течения жидкости. В то же время в основной цикл программы поступает информация с контроллера об актуальных скорости и давлении Vi и pi. В случае, если происходит изменение скорости, либо аналитическое давление расходится с фактическим, происходит вычисление коэффициента поворота дроссельной заслонки и сигнал поступает на контроллер. В этом случае программа обновляет начальные условия. Начало программы p0, V0 Получение p0, V0 Математическая модель: Режим течения Vаналит и pаналит k1 (V[i21] V[i2] ) k 2 (V[i 1] V[i ] ) да Контроллер Получение актуальной информации c контроллера Vi и pi abs(Vi – V(i-1))≠0 нет abs(pi – pаналит) ≠0 Рисунок 18. Алгоритм программы корректировки давления. 26 2.4.5. Экспериментальное моделирование поглощения и притока Перед тем, как проводить тестирование программы, необходимо убедиться, что математическое описание процессов притока и поглощения дает качественное совпадение с экспериментом. Рассмотрим получившееся распределение скоростей при моделировании поглощения (рис. 19). 1,4 1,2 V, м/с 1 0,8 V1 0,6 V2 0,4 0,2 0 0 200 400 600 800 1000 Время, сек Рисунок 19. Экспериментальное моделирование поглощения жидкости в забое. V1 – скорость выходного потока, V2- скорость входного потока. На рис.19 видно, что при появлении поглощения во временную отметку 300 секунд, идет существенное падение скорости выходного потока, при этом скорость входного потока увеличивается. Усиление поглощения происходит на отметке 600 секунд, это можно наблюдать из соответствующего изменения скоростей. На отметке 800 секунд происходит ликвидация поглощения, скорости восстанавливаются. Из графика видно, что изменение скоростей соответствует теории в п.2.2.2. Тот же эксперимент повторим для случая притока жидкости в забой (рис. 20). 27 1,4 1,2 1 V, м/с V1 0,8 V2 0,6 0,4 0,2 0 0 100 200 300 400 500 600 700 800 900 Время, сек Рисунок 20. Экспериментальное моделирование притока жидкости в забой. V1 – скорость входного потока, V2- скорость выходного потока. Из графика на рис.20 можно наблюдать, что приток появляется на временной отметке 300 секунд. До этого момента скорости равны. Усиление притока происходит на отметке 500 секунд. После ликвидации притока (650 секунд) скорости входного и выходного потоков восстанавливаются. Во время притока жидкости можно наблюдать существенный рост скорости выходного потока, что также соответствует уравнениям в п.2.2.2. 2.5. Тестирование программы управлением давления Для проверки работы разработанной программы и правильности подобранных коэффициентов повторим экспериментальные случаи притока и поглощения жидкости из 2.3.2., только в этот раз с включенной программой корректировки давления. Результаты эксперимента в случае поглощения жидкости представлены на рис.21. Поглощение жидкости проявляется на временной отметке 240 секунд. 28 1,2 1 V, м/с 0,8 0,6 V1 0,4 V2 0,2 0 0 100 200 300 400 -0,2 500 600 700 800 900 1000 Время, сек Рисунок 21. Компенсация поглощения управляемым клапаном. V1 – скорость входного потока, V2- скорость выходного потока. Работа программы начинается на следующем шаге (временная отметка 300 секунд). Из графика видно, что постепенно клапан закрывается, производя компенсацию за счет роста статического давления. Дроссельная заслонка полностью перекрывает течение выходного потока на временной отметке 660 секунд. В случае поглощения жидкости далее компенсация должна происходить за счет насоса обратного давления (п.2.2.4.), при этом выходной поток изменяет свое направление и должен иметь скорость, которую можно определить из формулы (10). Наиболее интересен случай притока жидкости, в котором компенсация давления происходит исключительно за счет управляемого клапана и можно наблюдать сходимость. Результаты работы программы в результате появления притока на рис. 22. На временной отметке 300 секунд появляется резкий приток жидкости в системе. Программа при этом производит грубую компенсацию за 90 секунд. Далее на промежутке от 400 до 700 секунд происходят скачки скорости потока, вызванные попытками программы точнее скомпенсировать давление, однако, для получения более точного результата необходимо настраивать систему, подбирая новые коэффициенты. Анализируя график на рис.22, можно сказать, что программа функционирует исправно. 29 1 0,99 0,98 0,97 V м/с 0,96 0,95 V1 0,94 V2 0,93 0,92 0,91 0,9 0 100 200 300 400 500 600 700 800 900 Время, сек Рисунок 22. Компенсация притока управляемым клапаном. V1 – скорость входного потока, V2- скорость выходного потока. III. Заключение В данной работе была разработана гидравлическая модель одномерного трубопровода для описания течения бурового раствора в скважине, которую можно применять в программируемом логическом контроллере для анализа и контроля давления. Был разработан экспериментально-демонстрационный стенд MPD, а также построена KVхарактеристика управляемого клапана, найден коэффициент пропорциональности для контроля давления управляемым клапаном. Были получены уравнения для описания скоростей в случае изменения количества жидкости в системе и проведена оценка времени снятия показаний для точной корректировки давления. Была продемонстрирована устойчивость при корректировке давления в случае притока. В заключение был создан стенд для демонстрации течения жидкости при бурении под контролем давления, а также реализован алгоритм корректировки давления в случае изменения количества жидкости. 30 IV. Список литературы 1. Glenn-Ole Ole, K. ; Aamo, M. «Nonlinear Model Based Control of unstable wells» / Modeling, Identification and Control, Vol. 28, No.3, 2007/ С. 69-79. 2. Donald G. Reitsma, Yawan Couturier “New choke controller for Managed Pressure Drilling”/ Proceedings of the 2012 IFAC Workshop on Automatic Control in Offshore Oil and Gas Production/ С. 223-230. 3. John McCaskill, Joe Kinder, Bob Goodwin, Power Chokes «Managing wellbore pressure while drilling» / IADC Drilling Contractor, March/April 2006/ С. 40-42. 4. Станислав Куликов, Андрей Бахтин, Гурбан Велиев, Алексей Чумаченко «Особенности и преимущества безопасного бурения» / weatherford.ru 5. Jonh J. Bloomer «Practical fluid mechanics for engineering application» / CRC Press, Sep 21, 1999/ С. 150-154. 6. Philip Frink «Managed Pressure Drilling - what's in a name» / IADC Drilling Contractor, March/April 2006/ С. 36-39. 7. Don M. Hannegan «Managed Pressure Drilling» / SPE 2006 -2007 Distinguished Lecturer Series/ 36 С. 8. Альтшуль А. Д. «Примеры расчетов по гидравлике» / Стройиздат, 1977/ 273 С. 9. Ingar Skyberg Landet «Modeling and control for Managed Pressure Drilling from floaters» / Norwegian University of Science and Technology, Department of Engineering Cybernetics, June 2011/ 114 С. 10. Maren Mæland «Managed Pressure Drilling» / Norwegian University of Science and Technology, Department of Petroleum Engineering and Applied Geophysics, June 2013 / 108 С. 11. Jarle Eilerås «Fault tolerant control for automated Managed Pressure Drilling» / Norwegian University of Science and Technology Department of Engineering Cybernetics, June 2012/ 67 С. 12. «Теоретические основы гидравлики» / Grundfos.com / 60 С. 13. «Python Documentation» / docs.python.org 14. «Arduino Documentation» / arduino.cc/en/Reference 15. Dave Elliot, Julio Montilva, Paul Francis «Managed Pressure Drilling Erases the lines» / Oilfield Review, Spring 2011 / С. 14- 23. 31 16. «GeoBalance Optimized Pressure Drilling Services» / Halliburton.com, Januray 2009 / С. 14-20. 32 Приложение 1. Безопасность жизнедеятельности при разработке стенда, содержащего систему с электрифицированными узлами управления и рабочего места оператора ЭВМ Рассмотрим воздействующие на человека опасные и вредные производственные факторы в соответствии с классификацией, приведенной в ГОСТ 12.0.003-74 /1 БЖД/. Вопервых, физические опасные и вредные производственные факторы. Движущееся оборудование, подвижные части: опасность травмирования исключена. На установке запрещено располагать какие-либо вещи, для рабочего инструмента имеется специальное место. Повышенная запыленность и загазованность воздуха рабочей зоны: экспериментальный модуль не содержит источников образования пыли и газа. Вытяжная вентиляция лаборатории не допускает превышения предельно допустимой концентрации вредных веществ в соответствии с ГОСТ 12.1.005-88 / 2 БЖД/. Повышенная или пониженная температура поверхностей оборудования, материалов: модуль управления – стационарная лабораторная установка, состоящая из монтажной панели, блоков питания, контроллера и кабелей соединения. Устройств, образующих холод, нет. Устройства, вырабатывающие тепло имеют радиаторы (процессор в системном блоке, радиаторы блоков питания, лампа освещения и т.д.). Меры защиты от поражения электрическим током. Важное значение для предотвращения электротравматизма имеет правильная организация обслуживания действующих электроустановок, проведение ремонтных, монтажных и профилактических работ. Во время работы оператору запрещается: переключать разъемы интерфейсных кабелей периферийных устройств при включенном питании загромождать верхние панели устройств посторонними предметами; производить частые переключения питания; допускать попадание влаги на поверхность электрические приборы. Требования к рабочему месту при выполнении работ сидя нормируются ГОСТ 12.2.032–78: При организации рабочего места следует обеспечить взаимное расположение всех его элементов в соответствии с эргономическими требованиями, с учетом характера выполняемого оператором исследования, комплексности технических средств, форм организации труда и наиболее оптимального для данного исследования рабочего положения. 33 Угол поворота монитора регулируется для лучшего обзора выводимых данных. При этом экран должен находиться от глаз пользователя на оптимальном расстоянии 600700 мм, но не ближе 500 мм с учетом размеров алфавитно-цифровых знаков и символов. Система управления стендом информирует оператора о ходе испытания путем вывода информации на экран монитора. Протокол испытаний с необходимыми выходными данными распечатывается на принтере. Рекомендуется предусмотреть место для хранения распечатанных протоколов и систематизации снятых данных. Размещение на рабочей поверхности используемого оборудования, производится с учетом его количественных, конструктивных особенностей (размер ВДТ и ПЭВМ, клавиатуры, и др.) и характера выполняемой работы. Рабочий стул (кресло) должен быть подъемно–поворотным и регулируемым по высоте и углам наклона сидения и спинки, а также расстоянию спинки от переднего края сиденья, при этом регулировка каждого параметра должна быть независимой, легко осуществляемой и иметь надежную фиксацию. Большинство испытательных операций будет проходить в автоматическом режиме под управлением компьютера, что позволит разгрузить оператора. Результаты испытаний фиксируются автоматически, оператор может их распечатать в виде протокола испытаний. В программе предусмотрены блокировки на случай неверных действий оператора или выхода гидрооборудования из строя. При возникновении внештатных ситуаций гидрооборудование будет отключено. Во время начального ввода данных, необходимых для проведения испытания, на экран выводятся подсказки, касающиеся наиболее важных параметров. 34