Методические указания №13 Переходные процессы
advertisement

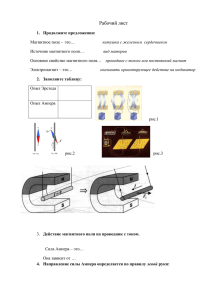
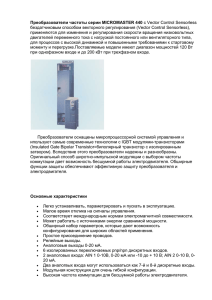
Министерство образования и науки РФ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Нижегородский государственный технический университет им. Р. Е. Алексеева Кафедра "Электрооборудование, электропривод и автоматика" ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ Методические указания к лабораторной работе №13 по дисциплине “Электрический привод” для студентов направления 13.03.02 всех форм обучения Нижний Новгород 2014 г ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАСЧЕТА + QF1 = 220 В - R1 Момент инерции исследуемого двигателя J=0,013 кгм2. Момент инерции нагрузочного генератора J=0,013 кгм2. Момент инерции соединительной муфты J=0,21 кгм2. HL1 КОНТРОЛЬНЫЕ ВОПРОСЫ LG1 R2 LM1 PA1 A SB1 "РТ" SB2 "Стоп" SB3 "ДТ" SB4 "Пуск" SB5 "ПВ" KL1 KL1.1 KL2 R3 KL3 PV1 BR1 mV TG KL1.2 KL3.1 M1 R4 PA2 M KL2.1 KL2.3 A PV2 KL1.3 V KL3.2 KL2.2 G1 G QF2 R5 Рисунок 7. Схема электрическая принципиальная лабораторной установки 1. Физический смысл электромеханической постоянной времени двигателя постоянного тока с независимым возбуждение, способы ее определения. 2. Классификация переходных процессов и основные допущения, принимаемые при рассмотрении переходных процессов в двигателе постоянного тока с независимым возбуждением. 3. Переходные процессы при электродинамическом торможении, торможении противовключением и реверсе с учетом активного и реактивного момента нагрузки. Уравнения и графики зависимостей = f(t) и I = f(t). 4. Переходные процессы при рекуперативном торможении для реактивного и активного статических моментов. Графики зависимостей = f(t) и I = f(t) для указанных вариантов рекуперативного торможения. 5. Определение времени торможения двигателя постоянного тока для различных способов торможения. 6. Влияние сопротивления тормозного резистора на протекание переходных процессов в различных режимах работы электродвигателя. 7. Элементы исследуемой установки, их характеристики, порядок проведения исследований. РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА 1. Основы автоматизированного электропривода: Учеб. пособие для вузов. М.: Энергия, 1974. 2. М. Г. Чиликин. Общий курс электропривода: Учебник для вузов. - М.: Энергия, 1971. 3. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода: Учебник для вузов. - М.: Энергоатомиздат, 1992. 15 14 КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ Знание переходных процессов в электроприводе позволяет правильно выбрать мощность электродвигателя, произвести расчет схем управления и подобрать для них электрические аппараты, уменьшить расход электроэнергии в пусковых и тормозных режимах. Переходным режимом электропривода называется его работа при переходе от одного установившегося состояния к другому. Например, переход электродвигателя от состояния покоя к вращению с заданной скоростью, от одной скорости вращения к другой, от одного направления вращения к другому, от одной величины нагрузочного момента к другой и т.п. Во время переходных режимов меняются ток, момент, скорость вращения вала электродвигателя, температура его частей и зависящие от нее параметры. Причинами возникновения переходных процессов являются : 1) возмущающие воздействия на электромеханическую систему привода: – механические (изменение нагрузочного момента); – электрические (изменение величины сетевого напряжения, питающего электропривод, из-за изменения нагрузки в смежных энергоприемниках); – тепловые (изменение параметров элементов электропривода из-за их нагревания); 2) управляющие воздействия: – изменение сигналов задания, определяющих скорость вращения электродвигателя, развиваемый им момент, направление движения, режим работы в ходе производственного процесса; – изменение параметров якорной цепи и цепи обмотки возбуждения электродвигателя, параметров питающей электродвигатель сети для обеспечения исполнительным механизмом требований технологического процесса. Во время переходных процессов изменяются составляющие всех видов энергий, запасенных в частях электропривода: кинетической - в механических звеньях, электромагнитной - в элементах электрических цепей, тепловой - во всех элементах электропривода. Благодаря существенной разнице в количественных соотношениях механической, электромагнитной и тепловой инерционностей в большинстве случаев эти процессы удается разделить и рассматривать независимо друг от друга: механические (электромеханические), электромагнитные и тепловые (электротепловые). Под механическими переходными процессами понимаются те процессы, в которых учитывается лишь механическая инерция привода и рабочего механизма (считается, что электромагнитная инерция пренебрежимо мала, а тепловая, наоборот, существенно больше механической). Под электромагнитными переходными процессами в электроприводе 3 понимаются такие процессы, в которых учитывается электромагнитная инерция, представляющая собой самоиндукцию и взаимоиндукцию обмоток, и механическая инерция. В этом случае имеет место сильная электромеханическая связь, объединяющая механическую и электрическую части электропривода в единое целое. Это характерно для электроприводов малоинерционных механизмов, электроприводов с синхронными электродвигателями, а так же для тех случаев, когда в переходных процессах участвуют элементы, обладающие большой электромагнитной инерцией, например, обмотки возбуждения машин постоянного тока. Под тепловыми переходными процессами понимаются те процессы, в которых учитывается самая большая инерционность - тепловая инерция электрических машин. При тепловых расчетах обычно пренебрегают механической и электромагнитной инерционностями. Так как в электроприводе при любом виде переходного процесса происходят изменения электрических величин (тока в обмотках, их сопротивлений, противо-ЭДС), то иногда механические и тепловые переходные процессы называют соответственно электромеханическими и электротепловыми. В данной работе рассматриваются механические переходные процессы в электродвигателе постоянного тока с независимым возбуждением при постоянном статическом моменте нагрузки на его валу без учета электромагнитных (индуктивность якорной цепи равна нулю) и тепловых (теплоемкость всех элементов равна бесконечности) переходных процессов. Поведение системы электродвигатель – исполнительный механизм в этом случае описывается системой уравнений (уравнением электрического равновесия и уравнением движения): U E M Mс IR J d dt , где (1) U – напряжение питающей электродвигатель сети (U = UH = const); E – противо- ЭДС электродвигателя; I – ток в якорной цепи электродвигателя; R – сопротивление якорной цепи электродвигателя; M – электромагнитный момент, развиваемый электродвигателем; MC – статический момент сопротивления (механический момент на валу ); J – суммарный момент инерции, приведенный к валу электродвигателя. 4 г) для режима реверса электродвигателя при сопротивлениях тормозных резисторов в цепи якоря RT1=30 Ом и RT2=20 Ом; д) для режима рекуперативного торможения при RД=0 и Rд =5 Ом. 3. Перенести полученные кривые = f(t) и I = f(t) в отчет. 4. По аналитическим формулам определить время торможения для указанных в п. 2 а,...,д случаев и сравнить его с экспериментальными данными. 5. По аналитическим формулам построить зависимости = f(t) и I = f(t) для режима торможения противовключением и реверса при RT1=20 Ом и для режима динамического торможения при RT1=30 Ом. Полученные зависимости I =f(t) Ф2< Ф1 Ф1 MT 0 MНАЧ=MУСТ IНАЧ IУСТ M I =f(t) 0 ем потока возбуждения двигателя довести его скорость вращения до 2000 об/мин и нажать кнопку SB1 "РТ". 5. Произвести теоретические расчеты и сравнить их с экспериментальными данными. ПАРАМЕТРЫ ЛАБОРАТОРНОЙ УСТАНОВКИ ПАСПОРТНЫЕ ДАННЫЕ ИССЛЕДУЕМОГО ДВИГАТЕЛЯ Тип РН, кВт UH, В IH, А RЯ, Ом nH, об/мин П22 1,0 220 5,9 4,17 1500 13 При реактивном статическом моменте режим рекуперации энергии в сеть можно получить, если у электродвигателя, работающего с ослабленным магнитным полем, резко увеличить ток в обмотке возбуждения до IBH. В этом случае скорость электродвигателя будет изменяться от 1 до 2 (рисунок 6). t Рисунок 6 сравнить с экспериментальными. УКАЗАНИЯ К ВЫПОЛНЕНИЮ РАБОТЫ 1. При выполнении работы используется электронный осциллограф, выполненный на базе персонального компьютера. Перед началом работы необходимо изучить инструкцию пользователя данным осциллографом. 2. Перед снятием характеристик = f(t) и I = f(t) необходимо определить масштабы тока, скорости и времени, используя показания соответствующих приборов на лабораторном стенде (см. рис 7). 3. При снятии характеристик в режиме электродинамического торможения, а также в режимах реверса и торможения противовключением предварительно необходимо включить исследуемый двигатель, довести его скорость вращения до значения скорости, соответствующей отсутствию добавочных резисторов в цепях якоря и обмотки возбуждения двигателя, установить требуемое сопротивление тормозного резистора, затем нажать соответствующую кнопку SB3 "ДТ" или SB5 "ПВ". 4. При снятии характеристик переходного процесса в режиме рекуперативного торможения необходимо предварительно включить двигатель, уменьшить сопротивление резистора в цепи якоря до нуля, а затем ослаблени- I нач Uн К Фн R нач ; I уст уст Uн 2. К Фн R уст ; нач 1; Практически начальный бросок тока будет несколько меньше, так как из-за инерционности в обмотке возбуждения нарастание потока до ФН не будет мгновенным и скорость вращения якоря за время его изменения успеет несколько уменьшится. Если якорь электродвигателя подключен к источнику с регулируемым напряжением (управляемому преобразователю), то перевод электродвигателя в режим рекуперативного торможения осуществляется уменьшением напряжения преобразователя. ПРОГРАММА РАБОТЫ 1. Ознакомиться с электрооборудованием установки (см. рисунок 7). 2. Снять кривые изменения угловой скорости и тока в якоре электродвигателя в функции времени: а) для пуска при добавочных резисторах в цепи якоря, обеспечивающих значения пускового тока 2IH, 3IH; б) для режима динамического торможения при сопротивлениях тормозных резисторов в цепи якоря, RT1=30 Ом и RT2=20 Ом; в) для режима торможения противовключением при сопротивлениях тормозных резисторов в цепи якоря RT1=30 Ом и RT2=20 Ом; 12 В свою очередь, E = KФ , а M = KФI и MС = KФIС = KФIУСТ, где К – конструктивная постоянная электродвигателя; Ф – магнитный поток, создаваемый обмоткой возбуждения; – скорость вращения вала электродвигателя. Подставив выражения для Е и М в систему уравнений (1) и разрешив ее относительно получим линейное неоднородное уравнение первого порядка d dt Tм Uн K Ф I R K Ф R K Ф Iс 0 уст , где IC – ток в якоре электродвигателя, определяемый величиной данного статического момента; Tм J R K Ф 2 - электромеханическая постоянная времени привода, - установившаяся скорость вращения вала электродвигателя, определяемая величиной приложенного статического момента. Решение данного уравнения имеет вид: УСТ (t ) уст C e t Tм . Постоянную интегрирования C определяем из начальных условий (т.е. t=0, = НАЧ), откуда С = НАЧ – УСТ. Окончательно, (t ) уст нач e уст t Tм . (2) Если из данного уравнения определить величину ускорения системы d dt При принятых допущениях уравнения (2), (3), (4) имеют универсальный характер, то есть остаются справедливыми для любого вида переходных процессов (пуск, торможение и т. д.). Значения начальных и установившихся величин определяются из механических характеристик электродвигателя, соответствующих данному конкретному режиму его работы. Переходные процессы носят апериодический характер и теоретически заканчиваются при t= . Согласно ГОСТ практически установившимся режимом работы электрической машины называется режим, при котором отклонение тока и напряжения якоря, а так же мощности от заданного значения не превышают 3%, поэтому можно считать, что переходные процессы заканчиваются за время t = (3 4)TM (точнее t = 3,5 TM). , то, подставив его в уравнение движения и разрешив это уравнение относительно тока в якоре электродвигателя, получим выражение, определяющее закон изменения тока якоря в функции времени: I ( t ) I уст I нач I уст e t Tм . (3) Если магнитный поток в электродвигателе остается неизменным, то выражение для тока якоря электродвигателя легко преобразуется в уравнение для электромагнитного момента: M ( t ) М уст М нач М уст e t Tм . (4) 5 ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ДВИГАТЕЛЬНОМ РЕЖИМЕ Переходный процесс пуска электродвигателя постоянного тока с независимым возбуждением происходит при подключении его якоря к питающей сети, при этом в обмотке возбуждения уже должен протекать номинальный ток IBH. Для ограничения тока в якоре допустимыми для данного электродвигателя значениями (IДОП) последовательно с ним включен добавочный резистор, поэтому общее сопротивление цепи R Rя Rд Uн , I доп где RЯ – сопротивление якорных обмоток электродвигателя, RД – сопротивление добавочного резистора. В данном случае начальные и установившиеся значения величин, входящих в уравнения переходных процессов, определяются как: нач 0, уст Uн K Ф Mc R ; I нач 2 K Ф Uн R I KЗ ; I уст Mc . K Ф Соответствующие зависимости = f(t) и I = f(t) приведены на рисунке 1 (кривые 1 и 1'). Здесь же показаны зависимости = f(t) и I = f(t) для пуска электродвигателя при MC = 0 (кривые 2 и 2'). При пуске без нагрузки уст Uн K Ф 0 и I уст 0. Включение добавочного резистора приводит к значительному возрастанию электромеханической постоянной времени, следовательно к затягиванию времени пуска. Для уменьшения времени пуска и сглаживания бросков тока в яко6 При наличии на валу электродвигателя активного статического момента режим противовключения можно получить, если, не изменяя полярности приложенного к якорю электродвигателя напряжения питающей сети, ввести в якорную цепь Rд, обеспечивающее при нулевой скорости момент электродвигателя меньший величины статического момента. Исходные данные для расчета переходных процессов: Uн R Mс ; 2 2 К Ф K Ф Uн К Ф I нач R Rд нач + B H RT H B Рисунок 4 I НАЧ =f(t) IC t 0 IУСТ I=f(t) IНАЧ Рисунок 5 уст нач ; Uн K Ф I уст Mс ( R Rд ) K 2Ф 2 ; Mс . К Ф Перевод электродвигателя в режим торможения противовключением изменением направления тока в обмотке возбуждения обычно не используется, так как большая электромагнитная постоянная времени этой цепи значительно уменьшает эффективность торможения: процесс торможения затягивается, то есть теряется основное достоинство этого режима. По сравнению с электродинамическим, торможение противовключением обеспечивает более быстрый останов электродвигателя, но сопровождается значительными потерями электроэнергии, потребляемой из сети. Основная область применения этого вида торможения: реверсивный электропривод и аварийное торможение механизма. РЕКУПЕРАТИВНОЕ ТОРМОЖЕНИЕ В рассмотренных ранее тормозных режимах электродвигатель работал как генератор, расходующий вырабатываемую электроэнергию на нагрев резисторов якорной цепи. Для передачи электроэнергии другим энергоприемникам необходимо чтобы противо-ЭДС якоря электродвигателя превышала величину напряжения в питающей сети. В этом случае электродвигатель будет работать в режиме генератора, включенного параллельно с сетью. Этот режим работы носит название режима рекуперативного торможения. Для электродвигателя постоянного тока с независимым возбуждением характерным признаком работы в режиме рекуперативного торможения явля- ется вращение его якоря со скоростью, превышающей скорость идеального холостого хода на данной механической характеристике. Режим рекуперации электрической энергии в сеть практически можно осуществить при пуске (реверсе) электродвигателя с активным статическим моментом на валу, совпадающим по знаку с моментом, развиваемым электродвигателем. Этот случай рассмотрен при изучении режима торможения противовключением. 11 ТОРМОЖЕНИЕ ПРОТИВОВКЛЮЧЕНИЕМ Если к якорю работающего электродвигателя приложить напряжение обратной полярности (отключить В и включить Н - рисунок 4) при неизменном направлении тока в обмотке возбуждения то момент двигателя изменит знак. Следовательно, двигатель перейдет в генераторный режим работы и будет тормозиться суммарным действием электромагнитного и статического моментов. Во время торможения двигатель продолжает вращаться в направлении, противоположном полярности напряжения на якоре, поэтому этот режим носит название режима торможения противовключением. Для ограничения тормозного тока в цепь якоря двигателя вводится внешний добавочный резистор. Значения величин, подставляемых в уравнения (2) - (4) определяются как (см. рисунок 5): Uн R ωнач Mс ; КФ K 2Ф 2 Uн R ω уст Mс ; КФ K 2Ф 2 Uн К Ф ωнач Iнач ; R Rт Mс I уст . КФ уравнения: t торм Tм (7) I нач I уст I кон I уст , Время торможения определяется из где I кон Uн R Rт – величина тока в якоре электродвигателя при скорости = 0. Полный расчет переходного процесса в данном случае соответствует режиму реверса электропривода с активным моментом нагрузки на валу электродвигателя. При реактивном статическом моменте расчет проводится в два этапа: до полной остановки электродвигателя пользуются исходными данными, определяемыми по уравнениям (7); далее следует учесть изменение знака статическо- го момента, то есть использовать исходные данные, соответствующие режиму пуска. 10 ре электродвигателя применяют многоступенчатый резисторный пуск. При многоступенчатом резисторном пуске двигателя задаются обычно определенными граничными колебаниями пускового тока или пускового момента. Переходный процесс пуска в 2 ступени изображен на рисунке 2. Переходный процесс рассчитывается отдельно для каждой ступени, I нач I1; I уст I c. (меняется ТМ). при этом для каждой из ступеней Расчет переходного процесса на искусственных электромеханических характеристиках ведется до получения текущего значения тока якоря электродвигателя, равного I2, на естественной характеристике – до значения IC. Расчет кривой изменения скорости вращения якоря электродвигателя ведут аналогично, значения НАЧ и УСТ берут соответствующими I1 и IC на данной электромеханической характеристике. I 0 С RЯ С =f(t) / 2 RЯ+RД2 I1 I=f(t) I2 I2 I1 I tП1 tП2 t=(3-4)TM t Рисунок 2 Время переходного процесса на отдельных ступенях пуска определяется потенцированием соответствующего уравнения переходного процесса: ti I I TMi ln 1 C I2 IC , УСТ 2 1 0 =f(t) С . стороны IКЗ d dt 1/ 2/ I=f(t) IC 0 получим С другой 0 tg t t 0 , следовательно, t = TM. Физически электроTM механическая постоянная Рисунок 1 времени ТМ - это время, в течение которого привод, обладающий моментом инерции J, разгоняется без нагрузки из неподвижного состояния до угловой скорости идеального холостого хода 0 при неизменном моменте, равном моменту короткого замыкания MK. Из уравнения движения для данных условий следует, что t J 0 Mк Tм . Для доказательства этого умножим и разделим полу- ченное ранее выражение для электромеханической постоянной времени на UH IC IC I tпп 2 RЯ+RД2+RД1 становленным из точки касания (см. рисунок 1). Действительно, тангенс угла наклона касательной к кривой определяет значение производной от уравнения этой кривой в точке касания. При t = 0 и (5) 7 где ТМi - электромеханическая постоянная времени на соответствующей ступени пуска. Время разгона на естественной характеристике t3==(3 4)ТМ3. Таким образом, время переходного процесса tПП определяется величиной TМ, которая имеет определенный геометрический и физический смысл. Геометрически TМ равна отрезку, отсекаемому на горизонтальной прямой, соответствующей уровню установившегося значения переменной (например, скорости), касательной к кривой переходного процесса и перпендикуляром, вос- Tм J R K Ф 2 Uн Uн J 0 J K Ф I КЗ 0 Mк . Так как R K Ф 2 ха- рактеризует изменение скорости вращения якоря электродвигателя при соответствующем изменении момента M, то также справедливо выражение Tм J M и, в общем случае, Tм J d dM . Если механическая характеристика исполнительного механизма также является линейной (Мс - линейная функция скорости), то Tм J , где С и C соответственно жесткости механических характеристик электродвигателя и исполнительного механизма. 8 d dt ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ТОРМОЗНЫХ РЕЖИМАХ ЭЛЕКТРОДИНАМИЧЕСКОЕ ТОРМОЖЕНИЕ Если обмотку якоря работающего электродвигателя отключить от сети и замкнуть на внешний резистор, а обмотку возбуждения оставить подключенной к сети, то двигатель переходит на работу в режиме генератора с независимым возбуждением. В результате момент, создаваемый двигателем, и статический момент нагрузки складываются и противодействуют движению привода, то есть идет процесс интенсивного торможения. Этот режим носит название электродинамического торможения. Начальные и установившиеся значения величин, подставляемых в уравнения для расчета переходных процессов, определяются по механическим характеристикам (см. рисунок 3): Uн IR ; Mс К Ф K 2Ф 2 К Ф нач I нач ; R Rд нач Mс I уст Mс . К Ф Время переходного процесса до полной остановки электродвигателя при электродинамическом торможении определяется из уравне- I НАЧ =f(t) 2 1 ния: IC t 0 IR K 2Ф 2 уст t торм = TM ln I уст I нач I уст , (6) Этому значению времени соответствуют нулевые значения скорости и тока. При дальС 2 IНАЧ нейшем расчете эти величины меняют знак, 1 приближаясь к установившимся значениям, что соответствует работе электропривода с Рисунок 3 активным статическим моментом. При торможении без нагрузки ток и скорость асимптотически приближаются к нулю (время торможения равно (3 4)TM). На рисунке 3 приведены зависимости тока и скорости вращения при торможении под нагрузкой (кривые 1) и при М0=0 (кривые 2). Таким образом, уравнения (2) – (4) определяют характер переходных процессов в электроприводе при наличии активного статического момента на валу электродвигателя, который не меняет знака при изменении направления движения. 9 I=f(t)