Методика выбора рациональных параметров фрезерного
advertisement

Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
Нижегородский государственный технический университет
им. Р.Е Алексеева
На правах рукописи
ВЕРШИНИН АЛЕКСАНДР ВЕНИАМИНОВИЧ
МЕТОДИКА ВЫБОРА РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ
ФРЕЗЕРНОГО РАБОЧЕГО ОРГАНА ПРЕДНАЗНАЧЕННОГО ДЛЯ
УДАЛЕНИЯ МЕРЗЛОГО ГРУНТА ИЗ-ПОД ТРУБОПРОВОДОВ
Специальность 05.05.04Дорожные, строительные и подъѐмно-транспортные машины
диссертации на соискание ученой степени
кандидата технических наук
Научный руководитель
д.т.н., профессор
Шапкин Виктор Александрович
Нижний Новгород
2015г
2
Содержание
Введение…………………………………………………………………………...4
ГЛАВА 1. ОБЗОР ЛИТЕРАТУРНОГО МАТЕРИАЛА И ПОСТАНОВКА
ЗАДАЧ ИССЛЕДОВАНИЯ………………………………………………………8
1.1. Анализ теорий, описывающих процессы механического взаимодействия
со средой рабочих органов дорожно-строительных машин…………………..8
1.2. История изучения вопроса в области резания мерзлых грунтов…..…..10
1.3. Физико-механические свойства мерзлых грунтов…………………......21
1.4. Обзор способов разработки мерзлых грунтов………………………......27
1.5. Обзор исследований, учитывающих влияние скорости на рабочие
процессы дорожно-строительных машин……………………………………...32
Выводы по главе 1…………………………………………………………….....40
ГЛАВА 2. ИССЛЕДОВАНИЕ ПРОЦЕССОВ ВЗАИМОДЕЙСТВИЯ
ДИСКОФРЕЗЕРНОГО РАБОЧЕГО ОРГАНА С МЁРЗЛЫМ ГРУНТОМ…..42
2.1. Особенности работы дискофрезерного рабочего органа при удалении
мѐрзлого грунта из-под трубопровода…………………………………………47
2.2. Моделирование величины усилия резания на единичном резце………...50
2.3. Моделирование разрушения грунта подкопочной машиной при
применении схемы ступенчатого забоя………………………………………..62
2.4. Моделирование геометрических параметров забоя……………………....63
2.5. Общие положения математической модели взаимодействия рабочего
органа дискофрезерной подкопочной машины с мѐрзлым грунтом………...69
2.6. Влияние неравномерности скорости резания мерзлого грунта
подкопочной машиной на энергоемкость его разрушения…………………...73
Выводы по главе 2………………………………………………………………..75
ГЛАВА 3. МЕТОДИКА ОПРЕДЕЛЕНИЯ РАЦИОНАЛЬНЫХ
ПАРАМЕТРОВ ФРЕЗЕРОВАНИЯ МЕРЗЛОГО ГРУНТА РАБОЧИМ
ОРГАНОМ ПОДКОПОЧНОЙ МАШИНЫ…………………………………….77
3.1. Общая методика выбора рациональных параметров……………………..77
3.2. Определение рационального положения рабочего органа в забое………78
3.3. Рациональные скорости резания…………………………………………...79
3.4. Определение рационального диаметра фрезы…………………………….83
3.5. Выбор рационального количества резцов на фрезе………………………88
Выводы по главе 3………………………………………………………………..94
ГЛАВА 4. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ВЗАИМОСВЯЗИ
ПАРАМЕТРОВ И РЕЖИМОВ РЕЗАНИЯ МЕРЗЛОГО ГРУНТА РАБОЧИМ
ОРГАНОМ ПОДКОПОЧНОЙ МАШИНЫ…………………………………….95
3
4.1. Цель экспериментального исследования………………………………….95
4.2. Объект экспериментального исследования…………………………….....96
4.3. Методика проведения испытаний………………………………………...103
4.3.1. Программа испытаний………………………………………………103
4.3.2. Место проведения испытаний……………………………………...104
4.3.3. Порядок проведения экспериментов……………………………….105
4.4. Методика планирования и обработка результатов экспериментов…….107
4.5. Результаты реализации расчѐта по планированию проведения
ортогонального композиционного плана Хартли……………………………114
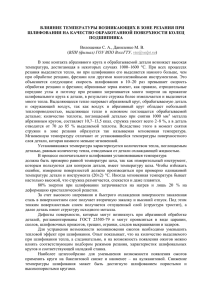
4.6. Оценка адекватности строгой математической модели взаимодействия
рабочего органа подкопочной машины с мерзлым грунтом………………...117
4.7. Методика определения сил сопротивления вращению рабочего органа
подкопочной машины………………………………………………………….124
4.8. Результаты экспериментального исследования…………………………127
Выводы по главе 4………………………………………………………………128
ЗАКЛЮЧЕНИЕ………………………………………………………………...130
РЕКОМЕНДАЦИИ ПО ВЫБОРУ РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ
ФРЕЗЕРНОГО РАБОЧЕГО ОРГАНА ПОДКОПОЧНОЙ МАШИНЫ……..132
БИБЛИОГРАФИЧЕСКИЙ СПИСОК…………………………………………133
Приложение. 1…………………………………………………………………..143
Приложение. 2…………………………………………………………………..148
Приложение. 3…………………………………………………………………..154
4
ВВЕДЕНИЕ
АКТУАЛЬНОСТЬ РАБОТЫ
На территории России, пролегает большое количество магистральных и
промышленных трубопроводов, общая длина которых составляет более 250
тысяч километров, а грузооборот более двух триллионов тонно- километров,
что составляет около трети грузооборота Российской Федерации.
Из общей длины трубопроводов около 50% трубопроводов было
построено в 1960-1980 годах. Учитывая, что нормативный срок службы
трубопровода в настоящее время находится в пределах от 20 до 30 лет,
следует ожидать возрастания объема предстоящих неотложных ремонтных
работ по поддержанию транспортной системы в работоспособном состоянии.
Так как большинство трубопроводов уложено в земляной толще, то следует
сделать вывод о том, что работы по техническому обслуживанию
трубопроводов будут сопровождаться большим количеством земляных
работ. То есть именно земляные работы будут являться определяющими при
оценке себестоимости ремонта участка трубопровода, так как их объѐм при
строительстве составляет более 1500 м3 на 100 метров трубопровода, а при
ремонте – более 3000 м3, так как необходимо не только вырыть траншею, но
и разработать грунт с боков и под трубопроводом, для обеспечения
установки на трубопровод ремонтного оборудования.
Впереди всего комплекса машин, предназначенного для ремонта
трубопровода, устанавливают подкопочную машину, которая удаляет грунт
из-под трубопровода. При этом тип грунтов и температура окружающей
среды оказывают существенное влияние на выбор времени года для
проведения ремонтных работ. Так, например, на слабонесущих грунтах в
летний период проведение каких-либо ремонтных работ невозможно без
предварительной подготовки местности для работы техники из-за того, что
машины теряют устойчивость. Следовательно, на таких грунтах
целесообразнее все работы проводить в зимний период, когда грунт
промерзнет. В зоне распространения сезонно-мерзлых или мерзлых грунтов
проведение работ связано с рядом трудностей: разработка замерзшего грунта,
по сравнению с незамерзшим, более трудоемка, малопроизводительна и
стоимость ее превышает стоимость разработки немерзлых грунтов в
несколько раз.
Поэтому исследование процессов взаимодействия рабочих органов
машин, предназначенных для удаления мерзлого грунта из-под
трубопровода,
а
также
изучение
физико-механических
свойств
разрабатываемого материала, с целью совершенствования конструкций
рассматриваемых машин, является актуальной научной задачей.
ЦЕЛЬ РАБОТЫ
Разработка методики выбора рациональных конструктивных
параметров и режимов работы рабочего органа машины, предназначенной
для удаления мерзлого грунта из-под трубопроводов.
5
МЕТОДЫ ИССЛЕДОВАНИЙ
В теоретической части работы применены методы математической
статистики, спектрального анализа, методы нелинейного программирования
и математического моделирования на ЭВМ. Экспериментальные
исследования проведены в натурных условиях на рабочих органах машины.
Кроме того, определялись физико-механические свойства типовых рабочих
сред. Результаты экспериментальных исследований обрабатывались с
помощью персонального компьютера. Теоретические исследования
производились при помощи стандартных пакетов программ для ПК, таких
как MathCAD 2000, MATLAB, EXCEL.
1.
2.
3.
НАУЧНАЯ НОВИЗНА
Разработана математическая модель взаимодействия рабочего органа
подкопочной машины, которая имеет ряд отличий от ранее применяемой
математической модели:
Фрезерование мерзлого грунта происходит ступенчатым забоем
резцами, установленные на разных диаметрах фрезы.
При данном способе резания возникает неучтѐнная в других моделях
колебания силы резания, обусловленной разницей в скоростях резания
различных резцов, а также вследствие применения резцов разной ширины,
величина которой может составлять до 100% общей силы данного способа
резания.
Предложена новая технология резания грунта, обеспечивающая
минимальную энергоѐмкость резания за счѐт применения различных схем
резания резцами, установленными на одной дисковой фрезе.
Предложена методика выбора рациональных конструктивных параметров
рабочего органа, отличающаяся тем, что в ней осуществляется проверка на
определение максимально-допустимой величины колебаний скорости
вращения фрез, обусловленных как различной шириной резцов, так и
установкой их на разных диаметрах.
ОБЪЕКТ ИССЛЕДОВАНИЯ
В качестве объекта исследования был выбран рабочий орган подкопочной
машины ПТ-НН1020П, выполненный в виде двух фрез, расположенных
симметрично относительно вертикальной оси машины и вращающихся во
взаимно противоположные направления.
ОСНОВНЫЕ ПОЛОЖЕНИЯ, ВЫНОСИМЫЕ НА ЗАЩИТУ
Методика выбора рациональных конструктивных параметров рабочего
органа машины, предназначенной для удаления грунта из-под
трубопроводов.
Математическая модель резания мерзлого грунта рабочим органом
подкопочной машины.
6
Результаты экспериментальных исследований,
обоснование выбора параметров рабочего органа.
направленных
на
ПРАКТИЧЕСКАЯ ЦЕННОСТЬ данной работы заключается в
реализации разработанной методики и программы при проектировании,
создании, модернизации и использовании машин фрезерного типа,
предназначенных для разрушения мерзлого грунта под трубопроводом.
РЕАЛИЗАЦИЯ РАБОТЫ
Результаты исследования внедрены в ООО «Промтех-НН» и
использованы при модернизации существующей подкопочной машины
ПТ-НН1020, а также при разработке перспективных проектноконструкторских решений для создания новых образцов подкопочных
машин; ООО «Машиностроительный инжиниринговый центр» при
разработке конструкций специальных машин.
Методики, алгоритмы и комплекс программ для ЭВМ используются в
учебном процессе на кафедре "Строительные и дорожные машины" НГТУ,
им. Р.Е. Алексеева, г. Н.Новгород, а также в научно-исследовательской
лаборатории специальных строительных и дорожных машин (НИЛ ССДМ
НГТУ, им. Р.Е. Алексеева, г.Н.Новгород).
АПРОБАЦИЯ РАБОТЫ
Отдельные результаты и основные положения докладывались на IV
Международной молодежной научно-технической конференции «Будущее
технической науки»- НГТУ.- Н.Новгород, 2005г., на III Межвузовской
научно-практической конференции преподавателей вузов, ученых,
специалистов, аспирантов, студентов Н. Новгород, ВГИПУ 2006, на II
Международной научно-практической конференции, посвящѐнная 35-летию
кафедры «Строительные и дорожные машины». Нижегородский
государственный технический университет им. Р.Е. Алексеева Н.Новгород,
2008г., на III Международной научно-практической конференции,
посвящѐнная 40-летию кафедры «Строительные и дорожные машины»,
Нижегородский государственный технический университет им. Р.Е.
Алексеева Н.Новгород, 2012г., на 79 Международной научно-практической
конференции, посвящѐнная 95-летию Нижегородского государственного
технического университета им. Р.Е. Алексеева «Безопасность транспортных
средств в эксплуатации» 2012г., на 12 Международной молодѐжной научнотехнической конференции - Н.Новгород: НГТУ им. Р.Е. Алексеева, 2013г., на
международной научно-технической конференции «ИНЕРСТОЙМЕХ-2015»г. Казань: КГАСУ, 2015г.
ПУБЛИКАЦИИ
По теме диссертации опубликованы 15 научных работ: 3 статьи в
журналах, входящих в Перечень российских рецензируемых журналов
рекомендованных ВАК РФ; 4 статьи – в журналах, не входящих в данный
7
перечень; 8 тезисов научных докладов. Объѐм принадлежащий автору
опубликованного материала составляет 2,2 п.л.
СТРУКТУРА И ОБЪЕМ РАБОТЫ
Диссертационная работа состоит из введения, четырех глав,
заключения, списка используемой литературы из 132 наименований и трех
приложений. Диссертация содержит 142 страниц основного машинописного
текста, включая 83 рисунка, 14 таблиц, 111 формул и приложения на 14
страницах.
8
ГЛАВА 1.
ОБЗОР ЛИТЕРАТУРНОГО МАТЕРИАЛА И ПОСТАНОВКА ЗАДАЧ
ИССЛЕДОВАНИЯ
1.1. Анализ теорий, описывающих процессы механического
взаимодействия со средой рабочих органов дорожно-строительных
машин
Существующие в настоящее время теории, в которых интерпретируются
процессы взаимодействия со средой рабочих органов и оборудования ДСМ,
можно условно поделить на две основные группы:
1) теории концептуальные, положения которых основаны на результатах
экспериментальных исследований, фактах эмпирического характера;
2) теории, базирующиеся на ряде положений статики сыпучих сред,
дополненных условием предельного равновесия.
К первой группе следует отнести работы отечественных ученых
В.П. Горячкина, Н.Т. Домбровского, А.Н. Зеленина, А.Д. Далина,
И.Д. Айзенштока [7, 41, 56 ,57, 58], а также зарубежных И. Ратье, Г. Кюна, Р.
Шилда[108, 131].
Ко второй - плеяду таких исследователей как Ю.А. Ветров,
К.А. Артемьев, В.И. Баловнев [10, 23-26].
Большое внимание процессам деформации грунта при резании и
копании уделяется в работах Д.И. Федорова [116], а также Н.Я. Хархуты
при исследовании уплотнения грунтов [121]. Математическое
моделирование процессов уплотнения грунтов основывается на
ключевых моментах теории пластичности. Грунты при этом
рассматриваются как упруго-вязко-пластические тем самым подчеркивается
наличие как обратимой, так и необратимой частей деформации, а также
влияние фактора времени и его производных- скорости приложения
нагрузки и скорости деформации [85] При теоретическом описании
процессов резания в основном принимаются допущения, базирующиеся на
экспериментальных данных, между тем имеют место попытки применять
для этих целей теории, относящиеся ко второй группе [85]. Также на основе
эксперимента установлено [5,33], что при резании глубоких щелей в зоне
упругих и пластических деформаций грунт подвергается сжатию.
Наиболее широкое распространение получила теоретическая проработка
процессов резания и копания землеройных машин. Здесь также можно
отметить два вышеописанных подхода. Остановимся подробнее на моделях
второй группы, основанных на положениях теории предельного состояния.
Существующая теория статики сыпучей среды [9,10] является
разновидностью теории пластичности. Для случая плоского напряженного
состояния, задача отыскания значений величин напряжений становится
статически определяемой и может быть самостоятельно решена без
рассмотрения деформируемости среды, если ввести условие предельного
9
состояния. В свою очередь это условие предполагает наличие двух основных
типов напряженного состояния рассматриваемой среды:
1) при котором небольшое изменение объѐмных или поверхностных сил
ещѐ не вызывает нарушения равновесия;
2) при которых некоторое, даже малое, изменение объѐмных и
поверхностных сил, приводит к потере равновесия и разрушению грунта.
Для составления моделей, описывающих процессы взаимодействия
органов ДСМ с грунтом, в качестве условия предельного состояния
принимают напряженные состояния второго типа. При этом процессы
взаимодействия рассматриваются с точки зрения тех положений теории
предельного равновесия, которые связаны с определением, главным образом,
пассивного давления грунта на подпорные стенки.
Задача о нахождении величины пассивного давления на подпорную
стенку, в зависимости от угла наклона последней к вертикали и угла
внешнего трения распадаются на три случая. Различают пологие подпорные
стенки, промежуточные и крутые. Связь между касательным и нормальным
напряжениями представляется в виде следующей зависимости: tg C ,
где - касательное напряжение на рассматриваемой площади; (-нормальное
напряжение; -угол внутреннего трения; С- сцепление грунта. Иначе говоря,
решается при трех различных граничных условиях замкнутая система
уравнений, являющегося замыканием системы уравнений, которое в
компонентах тензора напряжений можно записать в виде:
Х У 2C cos sin Х У
(1.1)
и двух дифференциальных уравнений равновесия:
d X d XY
g ;
dx
dy
(1.2)
d X
d XY
0,
(1.3)
dx
dx
где Х, У и ХУ - проекции нормального и касательного напряжений на
оси х и у, - массовая плотность грунта; g- ускорение свободного падения.
На примере землеройно-транспортных машин можно также показать,
что в зависимости от принятых исследователями расчетных схем процессов
взаимодействия рабочих органов с грунтом и соответствующих допущений
получены различные математические модели в виде формул и алгоритмов
для определения сопротивлений резанию и копанию.
Приведенные расчетные схемы и модели отражают различные
подходы их авторов к описанию процессов резания и копания. К
идеализации тех или иных особенностей этого процесса. Каждая из этих
моделей имеет область рационального применения.
Модели (выражение 1.2, 1.3, 1.4) носят полуэмпирический характер.
Объединяющим для моделей (выражение 1.5, 1.6, 1.7) является тот факт,
что все они построены в рамках теории предельного равновесия грунта,
10
именно тех еѐ положений, которые связаны с определением давления
грунта на подпорные стенки
Общим же для всех моделей является то, что области их
рационального
применения
ограничены
сравнительно
низкими
скоростями, значения которых, как показывает экспериментальная
проверка, не превышают 0,4 - 0,6 м/с. Для более высоких скоростей эти
модели оказываются непригодными, их погрешность составляет 50 - 70%.
Последнее обстоятельство становится очевидно по двум причинам: вопервых, при высоких скоростях значительно повышается роль
динамического фактора процесса, во-вторых, существенно меняются
физико-механические
параметры
рабочей
среды, она становится
сжимаемой, а деформации - необратимыми.
Глубоко
проанализированы
процессы
сжатия
грунта
при
взаимодействии с рабочими органами подъѐмно-транспортных машин
А. С. Слюсаревым [33]. Им разработана теория уплотнения сыпучего
материала в жесткой матрице, позволяющая для любого исследуемого
материала указать комплекс характеристик, однозначно определяющих
объѐмно-напряженное состояние материала в процессе его деформирования.
Детальный анализ процесса взаимодействия рабочего оборудования с
грунтом выполнен В. И. Баловневым [13]. Однако его методы расчета и
теоретические основы моделирования процессов резания и копания
основаны на уравнениях пассивного давления грунта на подпорные стенки.
То есть, основой теории, предложенной В. И. Баловневым, также базируются
на общих положениях механики грунтов, описывающих предельное
состояние сыпучей среды, иначе, - статике сыпучей среды.
Приведенный анализ показывает тенденцию развития теорий, посвященных интерпретации процессов взаимодействия со средой рабочих
органов строительных и дорожных машин, - от моделей, базирующихся на
эмпирических сведениях, к математическим моделям и алгоритмам,
основанным на статике сыпучей среды и, наконец, постепенный переход к
моделям, фрагментарно учитывающим динамические характеристики
исследуемых взаимодействий и сжимаемость среды. Логическим следствием
такой эволюции представляется возникновение теории, описывающих
динамическую картину взаимодействии со средой рабочих органов ДСМ.
Разработка на еѐ основе математических моделей, учитывающих движение и
сжимаемость среды, и адекватно отражающих физические характеристики
рассматриваемого процесса. Реализации указанных целей и посвящена
данная работа.
1.2. История изучения вопроса в области резания мерзлых грунтов
Впервые
экспериментальные
и
теоретические
исследования
разрушения мерзлых грунтов различными методами: резанием,
динамической (ударной) нагрузкой, вибрирующими режущими органами и
виброударным способом были выполнены в 1951-1955 гг., институтом
11
горного дела АН СССР совместно с Всесоюзным научно-исследовательским
институтом организации и механизации строительства (ВНИОМС), НИИ-200
Министерства
строительства
РСФСР.
Исследования
выполнялись
сотрудниками НГДАН Г.М. Веселовым, А.П. Степановым и аспирантами
В.И. Баловневым ( МАДИ ) и С.С. Музгиным ( ИГДАН ) под руководством и
непосредственном участии д.т.н. A.Н.Зеленина. Исследования проводились в
полевых и лабораторных условиях при температуре грунта от минус 0,5° до
минус 40°С и влажности от 6 до 60% [13,56].
Данными исследованиями было установлено, что механические
способы разрушения мерзлых грунтов ударной нагрузкой и резанием
являются наиболее прогрессивными, т.к. менее энергоемки и более надежны.
Так при сплошной разработке массива мерзлого грунта резанием
энергоемкость в среднем в 5 - 15 раз ниже, чем при прогреве грунта. При
разработке мерзлого грунта ударной нагрузкой (работа 1 удара
1000-3000 кгм) энергоемкость разрушения грунта в 15 раз ниже, чем при
резании и в 200 раз ниже, чем при отогреве грунта [13,56].
Исследованиями в области разработки мерзлых грунтов занимались и
занимаются многие другие советские ученые: Н.Г. Домбровский, М.И.
Гальперин, В.Д. Абезгауз, Ю.А. Ветров, А.Ф. Николаев, О.Д. Алимов. П.З.
Петухов, Д.И. Федоров и кандидаты технических наук М.И. Ровинский, В.П.
Баландин, А.А. Кисленко, Г.М. Веселов, А.И. Федулов, И.В. Родионов, Д.А.
Лозовой. М.А. Гурин, Б.Н. Киселев, Н.Г. Басов, И.А. Недорезов, Н.С.
Шкуренко и другие. Значительные работы проведены отдельными
специалистами, изобретателями и новаторами А.И. Сергеевым, С.Х.
Вартановым, А.М. Столяровым, A.М. Калягиным, П.О. Осиповым и другими.
В области исследований процессов разработки мерзлых грунтов и
создания машин для их разработки работал ряд научно-исследовательских
организаций, учебных институтов, промышленных предприятий и
строительных
организаций:
ВНИИЗеммаш,
ВНИИСтройдормаш
(В.П. Баландин- исследование и создание машин для разработки мерзлых
грунтов крупным сколом ударными нагрузками, М.И. Ровинскийисследование и создание рыхлителей мерзлых грунтов и скальных пород на
базе мощных тягачей), Горьковский политехнический институт
(А.Ф. Николаев, А.П. Куляшов, А.А. Назаровский, В.Ф. Кулепов- работы по
созданию и дальнейшему совершенствованию машин фрезерного типа для
проходки траншей и щелей в мерзлых грунтах, ВНИИЗеммаш, Киевский
инженерно-строительный институт (работы Ю.А. Ветрова и А.А. Кисленко).
Широких и направленных исследований в области разработки мерзлых
грунтов ведется далеко еще недостаточно. Это в значительной степени
объясняется теми трудностями, с которыми приходится встречаться при
проведении исследований в этой области, а именно: большой прочностью и
сопротивляемостью мерзлого грунта разработке, его абразивными
свойствами, необходимостью проведения трудоемких исследований в
12
тяжелых климатических и метеорологических условиях при очень низких
температурах, отсутствием возможности круглый год проводить
экспериментальные исследования в естественных полевых условиях.
Развитие машин для земляных работ в вечномерзлых грунтах шло по
пути использования опыта строительства в талых грунтах и применения
методов оттаивания грунта паром, солнечной радиацией, бурения горными
машинами.
Большой вклад в теорию резания и разрушения талых грунтов,
разработку методов расчета усилий и конструирования рабочих органов
машин для земляных работ (отвалов бульдозеров, ковшей экскаваторов и
скреперов и др.) внесли проф. Н. Г. Домбровский, А. Н. Зеленин,
Ю. А. Ветров, Д. И. Федоров, К. А. Артемьев, В. И. Баловнев и др.
Проф. Н. Г. Домбровский на основе целенаправленных исследований
различных грунтов получил широко применяемую в расчетах формулу для
определения сопротивлений грунта копанию и резанию через удельные
сопротивления (на единицу площади) копанию и резанию для ковшовых
рабочих органов.
Проф. А. Н. Зеленин обосновал пропорциональность сопротивлений
резанию работе внедрения в грунт, за эталон которой принял показания
динамического плотномера конструкции ДорНИИ. На основании обширного
экспериментального материала (для всех видов талых грунтов) получены
зависимости для определения сопротивления грунтов резанию в зависимости
от глубины и ширины, угла резания, наличия зубьев, степени блокирования и
затупления сначала элементарных профилей, затем периметров и наконец
рабочих органов типа ковша и отвала.
Метод расчета сопротивлений с учетом пространственности процесса
резания талых прочных грунтов разработал проф. Ю. А. Ветров. Он учел
особенности и трапециевидную форму одиночной прорези и комбинации
прорезей.
Зависимости, разработанные проф. Ю. А. Ветровым для отвалов
бульдозеров, скреперов и других машин, учитывают их затупление.
Проф. Д. И. Федоров обосновал закономерности изменения силы
резания талых грунтов различными рабочими органами и разработал
конструкции экскаваторных ковшей без зубьев (совкового типа, с козырьком,
полукруглого очертания).
Проф. К. А. Артемьев создал теорию расчета сопротивлений талых
грунтов резанию плоскими ножами и ножами с криволинейной режущей
кромкой, положенных в основу методики расчета скреперов.
Аналитический метод расчета сопротивлений талых грунтов резанию,
основанный на закономерностях статики сыпучей среды, разработал проф.
В. И. Баловнев.
Планомерное изучение свойств вечномерзлых грунтов как материала,
подлежащего разработке в строительных целях, началось с середины 70-х
годов XIX века.
13
Для вечномерзлых грунтов в поверхностных слоях, подвергающихся
разработке, характерным является твердомерзлое состояние, отличающееся
не сжимаемостью при действии нагрузок и хрупким разрушением.
Для сезонно-мерзлых грунтов в основном характерно пластичномерзлое состояние вследствие незначительных отрицательных температур и
большего количества незамерзшей влаги, поэтому они обладают
значительной сжимаемостью при действии нагрузок и вязкими свойствами.
На глубине до 30м, т. е. там, где осуществляются земляные работы,
влажность вечномерзлых грунтов, как правило, соответствует полной
влагоемкости или несколько превышает ее (ω ≥ ωп). При этом на глубине,
превышающей на 1-1,5м подошву сезонно-талого слоя грунта, отмечено
увеличенное льдонасыщение, а иногда и слой сегретационного льда
толщиной 20-50 см. Сезонно-талый слой в зимнее время года имеет влажность, как правило, соответствующую полной влагоемкости грунтов. В
отличие от вечномерзлых грунтов влажность талых грунтов соответствует их
естественной влагоемкости ω ≈ ωе < ωп.
Наиболее распространенные супесчано-суглинистые вечномерзлые
грунты имеют следующую влажность в условиях естественного залегания:
супеси 15—30%, суглинки 30—50%.
К основным принципам механики мерзлых грунтов проф.
Н. А. Цытович относит динамическое равновесие незамерзшей влаги и льда,
нестабильность свойств, релаксацию напряжений и ползучесть при
длительном воздействии нагрузок, а также миграцию влаги при промерзании.
Для процессов механической разработки вечномерзлых грунтов
существенны два принципа: равновесное состояние воды и льда и
нестабильность механических свойств, так как нагрузки, разрушающие
грунт, действуют практически мгновенно. В соответствии с принципом
равновесного состояния воды и льда при любой отрицательной температуре
в грунте содержится некоторое количество незамерзшей воды, оказывающей
существенное влияние на его прочностные показатели. Нестабильность
свойств вечномерзлых грунтов вызвана анизотропией свойств льда.
Проф. С. С. Вялов выделяет следующие внутренние структурные связи
в грунтах: первичное сцепление, определяемое силами межмолекулярного
притяжения, зависящими от химико-минералогического состава частиц
грунта и расстояния между ними; структурное сцепление, возникающее в
результате физико-химических процессов при формировании грунта;
сцепление вследствие цементации, сил смерзания между кристаллами льда и
минеральными частицами и их агрегатами.
Для талых грунтов характерно первичное и структурное сцепление, а
для мерзлых грунтов — сцепление вследствие цементации. Причем, чем
ниже температура, тем больше это сцепление.
Вечномерзлые песчаные (раздельнозернистые) грунты имеют
небольшие силы сцепления между частицами твердой фазы. При их
разрушении деформации сжатия значительны вследствие уплотнения грунта,
а прочность определяется главным образом силами трения, возникающими
14
между поверхностями соприкосновения частиц, и сопротивлением частиц
изменению их взаимного положения.
Вечномерзлые глинистые грунты имеют более мелкий фракционный
состав, чем песчаные. Разрушение этих грунтов начинается с разрыва
цементирующих связей, далее нарушаются силы молекулярного притяжения
между частицами твердой фазы при их взаимном перемещении и
уплотнении, что приводит к возникновению сил внутреннего трения.
Вечномерзлые глинистые грунты разрушаются как хрупкие или
пластичные среды, а прочность их определяется температурой, влажностью и
гранулометрическим составом.
Н. А. Цытович считает, что увеличение прочности мерзлых грунтов с
понижением температуры определяется изменением фазового состава воды:
чем ниже отрицательная температура, тем меньше в грунте незамерзшей
воды и больше его прочность. И. Н. Вотяков полагает, что, кроме фазового
состава воды, увеличение прочности мерзлого грунта определяется структурными преобразованиями частично гидратированного минерального скелета
грунта и льда-цемента при понижении температуры. При этом происходят
два процесса: рыхлые коагуляционные структуры, имеющие небольшую
прочность сцепления, переходят в более плотные кристаллизационноконденсационные структуры повышенной прочности внутриагрегатного и
межагрегатного сцепления; при понижении температуры вязкость льда
увеличивается, следовательно, возрастает прочность грунта. При этом в
сезонно-мерзлых грунтах естественной влажности (в талом состоянии),
имеющих относительно невысокие отрицательные температуры (до —10°С),
ограниченные областью основных фазовых переходов воды в лед,
преобладают внутренние структурные преобразования гидратированного
минерального скелета.
В вечномерзлых грунтах, имеющих полное влагонасыщение,
повышение прочности при относительно низких температурах (до —10°С)
объясняется в основном возрастанием вязкости льда.
При значительных отрицательных температурах (ниже —10°С), когда
фазовые переходы воды в лед в основном завершены и внутренние
структурные преобразования прекращены, образуются кристаллизационноконденсационные структурные связи.
Известны следующие виды воды в вечномерзлых грунтах: химически
связанная (входит в состав химических соединений), кристаллизационная
(входит в состав кристаллической решетки минералов), прочносвязанная
(соединена с поверхностью минеральных частиц и не входит в
кристаллическую решетку льда даже при очень низких температурах),
рыхлосвязанная (создает оболочку вокруг минеральных частиц с
прочносвязанной водой и постепенно переходит в лед при замерзании грунта
и его последующем охлаждении) и свободная вода, представленная
капиллярной и гравитационной (передвигается в грунте под действием силы
тяжести).
15
Последовательность замерзания воды различных видов в грунте при
охлаждении следующая: гравитационная вода замерзает при температуре
около 0°С, капиллярная и рыхлосвязанная вода замерзает при более низких
температурах (большая часть рыхлосвязанной воды замерзает при
температуре до —10°С), прочносвязанная вода замерзает при температуре
ниже —70°С. Таким образом, лед в грунте образован гравитационной,
капиллярной и рыхлосвязанной водой, создающей при замерзании
разветвленную кристаллическую решетку льда, прочно удерживающую
частицы твердой фазы, окруженные незамерзшей прочносвязанной и
частично незамерзшей рыхлосвязанной водой. При этом, чем ниже
температура грунта, тем большую толщину имеет кристаллическая решетка
льда и выше его прочность.
В области значительных фазовых превращений воды в лед при
замерзании грунта (песчаный грунт замерзает при температуре до —0,2°С,
глинистый и суглинистый — при температуре до —7°С, супеси — при
температуре до —3°С), т. е. при переходе 1% воды в лед при понижении
температуры на 1°С, прочность грунта зависит в основном от соотношения
незамерзшей воды и льда. Сезонно-мерзлые грунты, для которых характерно
пластично-мерзлое состояние, обладают незначительной прочностью.
В области незначительных фазовых превращений воды в лед
(от 0,1 до 1% при понижении температуры на 1°С) возрастание прочности
грунтов объясняется главным образом увеличением их льдонасыщенности, а
также увеличением прочности льда при понижении температуры.
Эти факторы объясняют повышенную прочность вечномерзлых
грунтов (имеющих преимущественно твердомерзлое состояние) по
сравнению с сезонно-мерзлыми грунтами.
В области практически замерзшего состояния грунта при температуре
минус 70°С и ниже (фазовые превращения воды в лед менее 0,1% при
понижении температуры на 1°С) прочностные свойства грунта определяются
прочностью льда.
С позиций механической разработки мерзлых грунтов их свойства
наиболее полно применительно к сезонно-мерзлым грунтам исследованы
проф. А. Н. Зелениным. С ростом отрицательной температуры всех типов
грунтов (пески, супеси, суглинки и глины) независимо от их влажности
сопротивления разрушению различным деформациям возрастают.
Резание – является весьма распространенным способом механической
разработки мерзлых грунтов. По принципу резания работают многие
землеройные машины (отрывка траншей, узких щелей): роторные и цепные
экскаваторы, фрезерные машины, рыхлители и т.д.
Наиболее важным вопросом при расчете и проектировании таких
машин является определение усилия резания. Оно необходимо для расчета
режущего органа на прочность и для определения потребной мощности
машины.
16
Во ВНИИстройдормаше проведены значительные исследования [13,56]
по определению прочности мерзлых грунтов при различных значениях
влажности и температуры.
Проведенные исследования позволили А.Н. Зеленину установить, что
сопротивление мерзлого грунта резанию зависит не только от состояния
грунта (температуры, влажности и гранулометрического состава) и сечения
срезаемой стружки (ширины и глубины резания), но и от их соотношения.
А.Н. Зеленин пришел к выводу, что удельное сопротивление грунта резанию
остается постоянным с изменением глубины резания и уменьшается при
одинаковом сечении стружки, с увеличением ее ширины.
Исходя из этого, он считает, что при одинаковом сечении стружки в
условиях блокированного резания выгоднее резать грунт тонкими и
широкими стружками [41, 43].
Установлено также, что значительное влияние на усилие резания
оказывают:
угол резания. Уменьшение угла резания с 90° до 30° дает снижение
усилия резания на 40 – 50 %;
условия резания (количество блокированных стенок).
Усилие резания при полублокированном резании на 25 %, а при
свободном на 45 – 50 % меньше, чем при блокированном резании.
А.Н. Зеленин, исследуя процесс резания грунтов, установил наличие
прямой линейной зависимости между сопротивлением грунта резанию
(усилием резания) Р и числом ударов С ударника ДорНИИ. Анализируя и
обобщая результаты своих исследований, он приводит простую
эмпирическую формулу для определения усилия резания мерзлого грунта
элементарным режущим профилем через С, минуя сложную зависимость от
температуры грунта, его влажности и гранулометрического состава
90 α
C h (1 0,55 S) 1
μ ,
150
(1.4)
где Р– усилие резания, кг; С– число ударов ударника ДорНИИ с
площадью штампа 1 см2; h– глубина резания, см; S– ширина режущего
профиля, см; α– угол резания, град; μ– коэффициент, учитывающий влияние
открытых
стенок;
при
блокированном
резании
μ=1,0;
при
полублокированном резании μ=0,7-0,75; при свободном резании μ =0,5-0,55;
∆– коэффициент, учитывающий затупление рабочего органа.
Данная формула учитывает не только влияние физического состояния
грунта на усилие резания (что учитывается числом С), но также влиянием
глубины, ширины, угла резания и наличия открытых стенок при резании
грунта. Формулу (1.4) А.Н. Зеленин рекомендует для определения усилия
резания грунта в любом его физическом состоянии элементарными
режущими профилями шириной от 1 до 10см.
В результате исследований А.Н. Зелениным разработана также шкала
сопротивляемости мерзлых грунтов резанию [56], которую широко
используют при исследованиях и расчетах резания. Шкала сопротивляемости
17
построена в зависимости от физического состояния грунта (температуры,
влажности и типа грунта) по двум показателям: по числу ударов С ударника
ДорНИИ, с наконечником F=1cм2 и углом заострения β=180° и по удельному
сопротивлению грунта резанию К, полученного для эталонного режущего
инструмента, имеющему ширину S=3см, угол заострения β=180° и угол
резания α=90°. Ширина режущего эталонного инструмента S=3см принята
вследствие того, что именно при этой ширине и α=90° величина удельного
сопротивления грунта резанию К численно равна величине С. Песок при
любой температуре и другие мерзлые грунты с температурой ниже минус не
подчиняются этой зависимости, поэтому для них дано сразу К.
А.Н. Зеленин указывает, что шкала сопротивляемости мерзлых грунтов
резанию не является абсолютно точной, а имеет целью получения численных
значений удельных сопротивлений резанию К и показаний ударника
ДорНИИ С, необходимых для инженерных расчетов.
Формула А.Н. Зеленина проста по структуре, в основном учитывает
влияние всех основных факторов на усилие резания, поэтому ей широко
пользуются при расчете землеройных машин для разработки мерзлых
грунтов резанием, хотя всей механики процесса резания грунта она еще не
учитывает, например, износ резца.
А.Н. Зеленин [56] предложил классифицировать трудность разработки
грунтов по числу С ударов плотномера ДорНИИ, что нашло отражение в
ГОСТ 30067-93 (приложение А).
Значительные исследования в области резания мерзлых грунтов были
проведены
докторами
технических
наук
Н.Г.
Домбровским,
М.И. Гальпериным и В.Д. Абезгаузом.
Анализируя и изучая работу резца, они пришли к выводу, что
определение усилия резания через удельное сопротивление резанию не
совсем точно. Резание мерзлого грунта, как правило, осуществляется резцами
с большими площадками затупления, что оказывает влияние на удельное
усилие резания, т.к. появляются дополнительные силы. Эти силы зависят от
износа резца, коэффициента сопротивляемости грунта внедрению, от
коэффициента трения между резцом и грунтом и других факторов. В этом
они убедились, проводя исследования по внедрению плоских штампов
различной геометрии и размеров в граничный слой породы.
Они рекомендуют определение силы сопротивления мерзлого грунта
резанию проводить через коэффициент критического напряжения, который
показывает, во сколько раз удельное сопротивление внедрению резца, в
заданных условиях, больше предела прочности грунта при одноосном
сжатии.
Они впервые предложили определять усилие резания не только для
острого резца, но и для затупленного с учетом силы трения на задней грани
резца. М.И. Гальперин и Б.Д. Абезгауз в работе [2] для определения усилия
резания приводят формулы
P1 Kp σ C b a ;
(1.5)
18
δ
P2 σ C b a Kp f Ks 1 ,
a
(1.6)
где Р1– усилие резания для острого резца, кг; Р2– усилие резания для
затупленного резца, кг; b– ширина резца, см; a– толщина стружки, см;
σС– прочность грунта при одноосном сжатии, кг/см2; Кр– коэффициент
критического сопротивления при резании (величина безразмерная). Он
учитывает условия и режимы резания. Его величина показывает, во сколько
раз удельное давление, при котором происходит разрушение грунта передней
гранью резца (или штампом), в заданных условиях, больше предела
прочности данного грунта на основное сжатие; f– коэффициент трения резца
о грунт; δ1– средняя ширина изношенной площадки на задней грани резца,
см; Кs– коэффициент сопротивления внедрения изношенной площадки
задней грани резца в грунт (величина безразмерная). Он учитывает
изменение удельного давления при внедрении резца для разных условий и
режимов работы. Его величина показывает во сколько раз удельное давление
при внедрении изношенной площадки резца в грунт больше предела
прочности на одноосное сжатие.
Коэффициенты Кр и Кs можно определить только опытным путем для
данных конкретных условий. Данных в литературе по их выбору для
мерзлых грунтов почти нет, если не считать очень ограниченных данных,
которые приводятся в работах [10], преимущественно для твердых горных
пород, что осложняет пользование данными формулами.
Аналогичные формулы для определения усилия резания мерзлого
грунта были предложены М.И. Гальпериным и Н.Г. Домбровским в работах
[35,51]. На основании исследований они пришли к выводу, что с точки
зрения наименьшей энергоемкости выгодно работать при больших сечениях
разрушаемого каждым резцом слоя грунта.
В
конструкции
режущего
органа
машины
рекомендуют
предусматривать такую расстановку резцов, чтобы большая часть грунта
разрушалась в условиях свободного или полусвободного резания. Скорость
резания при разработке мерзлых грунтов рекомендуют принимать 1м/с [2].
В Киевском инженерно-строительном институте к.т.н. А.А. Кисленко
под руководством д.т.н. Ю.А. Ветрова в период с 1957 по 1961 гг.
проводились исследования по резанию мерзлых грунтов, описанных в
работах [23,24].
Исследования проводились на динамометрической тележке в полевых
условиях с единичными ножами разной ширины, с разными углами резания,
радиусами затупления режущей кромки резца и площадки износа, при разной
глубине резания, на прямых и ступенчатых резцах.
Данные исследования позволили установить, что главными факторами,
влияющими на процесс резания, являются: ширина и глубина резания, угол
резания, притупление режущей кромки ножа, площадка износа на его задней
грани, а также пространственность взаимодействия режущего инструмента с
грунтом.
19
Пространственность процесса проявляется в разрушении грунта в
пределах трапециидальной прорези, имеющей ширину, значительно
превосходящей ширину ножа при блокированном резании (рисунок 1.1).
Разрушение грунта во время отделения стружки происходит в
результате развития в нем сложного напряженного состояния.
В разных частях прорези (зонах) разрушение идет разными путями:
преимущественно путем сжатия и сдвига лобовой гранью ножа, отрыва и
сдвига в боковых расширениях прорези и среза у боковых ребер ножа возле
режущей кромки. Отсюда в разных частях прорези и разные удельные
сопротивления резанию. В лобовой части больше, чем в боковых
расширениях прорези.
Рисунок 1.1 Схема блокированного резания мерзлого грунта и зоны действия
составляющих силы резания
Исходя из этого, для определения силы резания они предлагают
формулу:
Р = Рсв + Рбок +Рбок.ср + Ризн,
(1.7)
где Рсв, Рбок, Рбок.ср– соответственно силы сопротивления разрушения
грунта перед передней гранью резца, в боковых расширениях прорези и
срезанию по бокам резца; Ризн– дополнительная сила, проявляющаяся в
результате износа резца.
Для учета составляющих и угла резания вводятся коэффициенты,
определяемые опытным путем.
Для случая резания острым инструментом формула для определения
усилия резания (касательной составляющей силы резания) имеет вид
P mСВ b h 2 mБОК h 2 2 mБОК .СР h ,
(1.8)
где υ– коэффициент, характеризующий влияние угла резания; mСВ и mБОК–
коэффициенты, характеризующие удельное сопротивление грунта резанию в
средней части прорези и в ее боковых расширениях, кг/см2; b и h– ширина и
глубина
резания,
см;
mБОК.СР–
коэффициент,
характеризующий
сопротивление грунта срезу боковыми ребрами ножа у дна прорези,
отнесенное к единице глубины резания, кг/см.
Ранее эта формула была предложена Ю.А. Ветровым [23,24] для
определения усилия резания в немерзлых грунтах.
20
В процессе исследования были определены коэффициенты, входящие в
формулу, но они определены для конкретных частных условий проведенных
опытов. В литературе данных по их выбору нет, что и затрудняет
пользование данной формулой.
В процессе своих исследований они установили, что увеличение угла
резания с 30° до 50° увеличивает силу резания на 50%.
Проводя одновременный замер касательной и нормальной
составляющей силы резания, ими определен коэффициент трения между
мерзлым грунтом и ножом. Он составил f = 0,5.
Анализируя результаты своих исследований, они пришли к выводу,
что наименьшая энергоемкость наблюдается при соотношении h/b=1,8 – 2,2 и
что целесообразно резать мерзлый грунт толстой стружкой [122].
Краткий обзор основных исследований по резанию мерзлых грунтов
показал, что основными факторами, влияющими на сопротивление мерзлых
грунтов резанию, являются: физическое состояние грунта (температура,
влажность и гранулометрический состав), глубина и ширина резания, угол
резания, условия резания (блокированное, полусвободное и свободное) и
затупление резца.
Результаты данных исследований являются научной основой и
отправными данными для определения усилий резания при расчете и
проектировании машин для разработки мерзлых грунтов резанием.
Анализ проведенных исследований свидетельствует о том, что пока нет
единого мнения о закономерности изменения удельного сопротивления
грунта резанию в зависимости от параметров срезаемой стружки.
Из представленных формул наиболее удобной формулой для
определения усилия резания мерзлых грунтов можно считать формулу (1.1)
д.т.н. А.Н. Зеленина, т.к. пользоваться формулами других авторов
затруднительно из-за отсутствия данных по выбору входящих в них
коэффициентов. Но и формула А.Н. Зеленина так же имеет недостатки и не
учитывает ряд факторов, влияющих на процесс резания мерзлых грунтов,
вследствие чего нельзя считать ее абсолютно точной.
Формула А.Н. Зеленина базируется на зависимость между
сопротивлением грунта резанию (усилием резания) Р и числом ударов С
ударника ДорНИИ, хотя в настоящее время одним, из наиболее
распространенных и достоверных методов изучения зависимостей
сопротивления мерзлого грунта резанию, является комплекс исследований с
использованием ударника КИСИ. Сущность данного метода заключается в
получении эталонных сил резания мерзлого грунта резцами с
фиксированными параметрами. Неоспоримым преимуществом нового метода
является, то, что он, сочетая простоту конструкции и методики применения
последнего, позволяет получать не отвлеченный коэффициент прочности
грунта основания, а непосредственно эталонную силу резания. Удобство
данного способа получения математической модели заключается в том, что
переход от эталонных параметров к реальным будет заключаться лишь в
определении вида различных факторов на усилие резания.
21
На данный момент работами исследователей [68,69, 85 и д.р.] получена
математическая модель для резания льда фрезой, учитывающая зависимость
усилия резания не только от параметров срезаемой стружки, но и от ряда
других факторов:
Р
Р0
* h n 1 (b 1)(1 kt)(1 V ) 1 ( 40 o ) 2 * ,
1 kt0
(1.9)
где Р0– единичная сила резания льда, получаемая при резании льда
толщиной h=1cм, резцом шириной b=1cм, угле резания =40° и скоростью
резания V=1 м/с; t0 – модуль температуры льда на момент испытаний; n, k, ,
, – коэффициенты, характеризующие степень зависимости изменения силы
резания от изменения соответственно глубины резания, температуры
резания, ширины резца, скорости резания и угла забоя; h – глубина резания,
см; b– ширина резца, см; α– угол резания, град; k- зависимость прочностных
свойств льда от температуры, 1/град; - коэффициент блокированности реза
(см. таблицу 1.1).
Т.к. характер разрушения льда аналогичен разрушению мерзлого
грунта (данное утверждение экспериментально подтверждено в третьей главе
диссертации), то данная зависимость была взята за основу автором в
диссертации, но с учетом своей математической модели – для резания
мерзлого грунта.
1.3. Физико-механические свойства мерзлых грунтов
При расчете и проектировании машин для разработки мерзлых грунтов
необходимо знать некоторые физико-механические свойства мерзлых
грунтов.
Мерзлые грунты - это грунты, имеющие отрицательную или нулевую
температуру, в которых хотя бы часть содержащейся воды замерзла, т.е.
превратилась в лед [122].
Мерзлый грунт в общем случае рассматривают как 4-х фазную
систему, состоящую из твердых минеральных частиц, связующего вещества
(льда), воды и воздуха. Замерзание грунтов сопровождается целым рядом
физико-химических процессов, существенным образом сказывающихся на их
свойствах и структуре.
В процессе замерзания грунта вода, находящаяся в его порах, при
соответствующей температуре (первые кристаллы льда в грунтовой воде,
характеризующие начало замерзания, появляются при температуре минус
0,1°С, а полное замерзание грунта происходит при температуре минус
0,5-0,6°С) переходит из жидкого состояния в твердое, т.е. в лед, который
цементирует минеральные частицы грунта в один общий монолит, благодаря
чему прочность последнего увеличивается в десятки и даже сотни раз. Если
для не мерзлого грунта удельное сопротивление разанию К=2-3кГ/см2 , то
для мерзлого грунта, при температуре минус 10°С, величина К достигает
22
300 кГ/см2 [122]. Количество льда в мерзлом грунте зависит от влажности
грунта, величины отрицательной температуры и времени промерзания. Чем
больше эти величины, тем больше будет образовано льда в грунте, тем он
будет прочнее.
Грунты, имеющие небольшое количество влаги– сухие грунты,
замерзая, остаются рыхлыми и сыпучими, например, сухой песок.
Наряду со льдом в порах мерзлого грунта всегда остается то или иное
количество незамерзшей воды, что оказывает существенное влияние на
физико-механические свойства последнего, придавая ему свойства талых
грунтов (пластичность, электропроводность и др.).
Характер деформации мерзлых грунтов в большей степени зависит от
их физического состояния (гранулометрического состава, влажности и
температуры), а также от величины и скорости приложения нагрузки. В
зависимости oт сочетания этих факторов, деформация мерзлых грунтов
может быть хрупкой или пластичной.
Пластические деформации в мерзлых грунтах в наибольшей степени
проявляются при температуре грунта от минус 1,0°С до минус 7°С. С
понижением отрицательной температуры от минус 8°С до минус 25°С
мерзлый грунт приобретает свойства некоторой хрупкости.
Существенное влияние на свойства мерзлых грунтов оказывает
скорость возрастания нагрузки. Как показали опыты отдельных
исследователей [68,122], большие скорости возрастания нагрузки приводят к
повышению сопротивления мерзлого грунта сжатию. Сопротивление грунтов
сжатию является основным показателем физико–механических свойств
мерзлых грунтов.
На рисунках 1.2 и 1.3 приводятся данные по пределу прочности
мерзлых грунтов при одноосном сжатии, полученные различными авторами
[68,85,122] в зависимости от температуры и влажности грунта.
Из приведенных данных видно:
1. Сопротивление грунтов сжатию с понижением температуры растет для
всех видов грунта, достигая десятков и даже сотен кГ/см2 .
2. Песчаные грунты характеризуются значительно-большим пределом
прочности на сжатие, нежели глинистые грунты.
Большое влияние на прочность мерзлых грунтов, а следовательно и на
сопротивляемость их резанию, отколу и прочим деформациям оказывает не
только их температура, но так же и влажность грунта.
На рисунках 1.4, 1.5 и 1.6 приведены результаты исследований проф.
д.т.н. А.Н.Зеленина [56] по определению зависимости удельного
сопротивления мерзлого грунта резанию К от температуры грунта,
гранулометрического состава и влажности (исследования проводились при
блокированном резание стружки постоянного сечения шириной S=3 см,
глубиной h=1см и угле резания α=90°).
23
Рисунок 1.2 Зависимость предела прочности мерзлых грунтов при
одноосном сжатии от температуры и влажности
1 - песок (влажность ω=16-17%); 2 - супесь (ω =11-12%); 3 - супесь (ω =2126%); 4 - глина (ω =43-49%); 5 - пылеватая глина с органическим
веществом (ω =52-61%); 6 - тяжелые супеси (ω =22-23%).
На рисунке 1.4 видно, что с понижением температуры для всех 4-х
категорий грунта различной влажности, удельное сопротивление грунта
резанию К непрерывно нарастает, т.к. все большее количество воды
переходит в лед и грунт становится при этом более прочным. Наиболее
резкое увеличение прочности наблюдается в момент перехода грунта из
талого состояния в мерзлое (при температуре от минус 0,3° до минус 0,7°С ).
С увеличением влажности удельное сопротивление резанию К для всех
мерзлых грунтов возрастает, достигая наибольшей величины при влажности,
близкой к полному заполнению пор грунта льдом (рисунок 1.5 и 1.6).
При дальнейшем увеличении влажности, при избытке ее, при
переувлажнении грунта, удельное сопротивление резанию К снижается и
довольно плавно приближается к величине удельного сопротивления
резанию чистого льда при данной температуре (рисунок 1.6).
Гранулометрический состав грунта так же оказывает влияние на их
прочность, но значительно меньше, чем температура и влажность. Наиболее
трудно разрабатывать мерзлые супесчаные и суглинистые грунты.
Для расчета машин важно знать величины сопротивлений мерзлых
грунтов сдвигу и разрыву.
24
Рисунок 1.3 Зависимость сопротивления мерзлых грунтов одноосному
сжатию от температуры при разных влажностях
а - мерзлой глины; б - мерзлого песка; в - мерзлой пылеватой супеси.
Рисунок 1.4 Зависимость удельных сопротивлений резанию от
температуры в грунтах различного гранулометрического состава
1 - суглинок, ω =20,4%; 2 - супесь, ω =15,2%; 3 - глина, ω =31,2%;
4 - песок, ω =11,4%.
25
Рисунок 1.5 Зависимость удельных сопротивлений резанию от весовой
влажности супесчаного грунта различной температуры
Рисунок 1.6 Зависимость удельных сопротивлений резанию от весовой влажности суглинистого грунта
На рисунке 1.7 приведен график величины предела прочности мерзлых
грунтов и льда при сдвиге, в зависимости от температуры. Эти кривые
получены в лабораторных условиях М.Л. Шейковым [126].
С понижением температуры механическая прочность грунта
возрастает, а сопротивление мерзлого грунта разрыву в несколько раз
меньше, чем сжатию.
Таким образом, мерзлые грунты по-разному сопротивляются
различным видам деформации.
Из изложенного следует, что для разрушения мерзлых грунтов
необходимо применять такие способы разрушения, при которых доминируют
напряжения разрыва. Одним из таких способов является комбинация скола с
отрывом. Мерзлые грунты, наряду с большой механической прочностью,
обладают еще и значительными абразивными свойствами, что чрезвычайно
осложняет их разработку резанием. Абразивность мерзлых грунтов в
26
значительной степени определяет интенсивность износа режущего
инструмента, поэтому образивность следует рассматривать, как одно из
основных физико-механических свойств мерзлых грунтов.
Рисунок 1.7 Кривые предела
прочности при сдвиге, в
зависимости от
температуры:
1- лед;
2- супесь;
3- глина
Рисунок 1.8 Кривые предела
прочности на разрыв в
зависимости от
температуры:
1- глина, ω =20%;
2- песок, ω =20%;
3- глина, ω =10%;
4- песок, ω =10%
На рисунках 1.8 и 1.9 приведены данные о пределе прочности на
разрыв мерзлых грунтов и льда в зависимости от температуры. Рисунок 1.8данные Трупака М.Г. [111], рисунок 1.9- данные Пекарской Н.К., Ровинского
М.И. и др. [99].
Рисунок 1.9 Сопротивление разрыву мерзлых грунтов и льда
при различной температуре:
1- песок, ω=15%; 2- лед; 3- песок, ω=20%; 4- глина, ω=70%; 5- глина,
ω=48%.
27
На рисунке 1.10 приведены данные Гасенина И.А зависимости
эталонной силы резания от температуры в грунтах различного
гранулометрического состава:
Рисунок 1.10 Зависимость эталонной силы резания от температуры в
грунтах различного гранулометрического состава
1.4. Обзор способов разработки мерзлых грунтов
Применяемые в настоящее время способы разработки мерзлых грунтов
можно подразделить на следующие группы:
а) непосредственная разработка мерзлого грунта обычными землеройными
машинами;
б) разработка предварительно утепленного слоя грунта;
в) предварительное оттаивание мерзлого грунта;
г) разработка мерзлого грунта взрывным способом;
д) разработка мерзлого грунта механическими способами (специальными
машинами и механизмами, работающими на принципе резания, удара,
вибрации и пр.).
а)
Непосредственная
разработка
мерзлого
грунта
обычными
землеройными машинами:
Мощные одноковшовые строительные экскаваторы, бульдозеры,
некоторые роторные экскаваторы могут разрабатывать мерзлый грунт лишь
при небольшой глубине промерзания до 20-30см, что резко ограничивает их
применение. Все другие маломощные землеройные машины не могут
разрабатывать мерзлый грунт даже при ничтожных промерзаниях.
б) Разработка предварительно утепленного слоя грунта:
28
Для предохранения грунта от промерзания применяют различные
методы: покрывают поверхность грунта, с осени до начала морозов,
дешевыми местными изолирующими материалами (листьями и ветками
деревьев, травой, мхом, древесными опилками и пр.); с осени проводят
глубокую вспашку по предложению В.Ф. Утенкова [113], ведут
снегозадержание, проводят искусственное намораживание льда по
предложению Г.А. Нурок [92] и другие методы, которые могут создать
условия для работы обычных землеройных машин.
При больших объемах работ эти методы часто оказываются
экономически не выгодными или технически трудновыполнимыми. Они
имеют ограниченное применение, т.к. не могут быть использованы в зоне
вечной мерзлоты и при проведении оперативных народнохозяйственных
работ.
в) Предварительное оттаивание мерзлого грунта:
Предварительное оттаивание мерзлого грунта до температуры 2°- 3°С,
с целью разработки его обычными землеройными машинами, может
производиться с использованием электрической энергии, энергии пара, воды,
газа, жидкого топлива, термохимического прогрева, прогрева ТВЧ и т.д. Для
прогрева малых объемов грунта применяют огневые способы: сжигая дрова,
торф, угольную пыль и другие виды топлива. Все эти методы, несмотря на
относительное их удобство, неэффективны и экономически маловыгодны,
вследствие большого потребления энергии и больших затрат на различные
подготовительные операции.
На оттаивание 1м3 мерзлого грунта электропрогревом при глубине
промерзания 1м и температуре окружающего воздуха минус 15°-20°С
расходуется 25-30кВт.ч/м3 электроэнергии [33,56]. Кроме этого,
электропрогрев требует дополнительного утепления грунта (опилками),
создания электропроводности в грунте между электродами (мерзлый грунт
обладает низкой электропроводностью, поэтому на первой стадии прогрева
электропроводность
между
электродами
достигается
благодаря
утеплительному слою, для чего опилки смачивают раствором медного
купороса, соли и других химикатов). При электропрогреве необходимо
принимать особые меры для предохранения от поражения током.
На оттаивание 1м3 мерзлого грунта, также при глубине промерзания
1м и температуре окружающего воздуха минус 15°-20°С, расходуется
35-38 кВт.ч/м3 энергии пара [33,56], т.е. больше, чем электроэнергии на 30%.
Это объясняется тем, что часть тепла пара, теряется в атмосферу в системе
трубопроводов. К отрицательной стороне паропрогрева надо отнести
необходимость сверлить шпуры в мерзлом грунте для установки труб, что
само по себе сложно и дорого.
При паропрогреве возможно насыщение траншей и котлованов водой,
что приводит к нарушению структуры и снижению несущей способности
грунта.
Огневой способ прогрева еще более энергоемок, чем электро и
паропрогрев, т.к. в этом случае грунт прогревается только с поверхности, что
29
даже при условиях хорошей термоизоляции кожухов приводит к большим
потерям тепла в атмосферу. В этом случае средний расход энергии,
приведенный к киловатт-часам, составляет 60-65 кВт.ч/м3 [33,56]. Этот
способ часто используется для разработки небольших объемов мерзлого
грунта в черте города.
Необходимо отметить, что независимо от способа прогрева, процесс
оттаивания мерзлого грунта продолжается не менее 20 - 25 часов и даже
более суток, что не всегда, удобно для производства работ.
г) Разработка мерзлого грунта взрывным способом:
Взрывной способ является достаточно производительным и
эффективным при значительной глубине промерзания (не менее 1м) и
большом объеме земляных работ (не менее 1000м3), например, при ведении
вскрышных горных пород. В условиях строительства этот способ имеет
весьма ограниченное применение. К недостаткам рыхления мерзлого грунта
взрывным способом надо отнести:
при незначительной глубине промерзания этот способ мало
эффективен;
производство взрывных работ требует большой затраты труда на
бурение скважин-шпуров и большого расхода взрывчатых веществ:
аммонала, тола и др.;
быстрое вторичное смерзание взорванных кусков, что требует
дополнительных взрывов;
низкая производительность экскаваторов из-за простоев в ожидании
взрывов;
невозможность проведения взрывов в общестроительных условиях
(городские, населенных пунктах, вблизи зданий, воздушных и
подземных коммуникаций и т.д.);
малопригоден для рытья траншей.
д) Разработка мерзлого грунта механическими способами:
В настоящее время большое внимание уделяется способам
механического разрушения мерзлого грунта (резанием, ударными нагрузками
и виброударными рабочими органами). Они, как показывают теоретические и
экспериментальные исследования процесса разрушения мерзлого грунта и
практика эксплуатации машин, являются наиболее рентабельными и
прогрессивными, т.к. более надежны, удобны и менее энергоемки.
Даже при наиболее энергоемком из всех механических способов, а
именно- резании, для разрушения 1м3 мерзлого грунта, требуется затратить в
среднем 5-8кВт.ч/м3, а при разрушении отколом глыб ударными нагрузками
затрата энергии не превышает 0,75-1кВт.ч/м3 [33].
По данным А.Н. Зеленина [56] усредненная энергоемкость при резании
мерзлого грунта составляет 5,6–7,4 кВт.ч/м3, а при разрушении ударными
нагрузками не более 0,7кВт.ч/м3. В более поздней своей работе А.Н. Зеленин
[57] приводит среднюю энергоемкость при резании, равной 1–2кВт.ч/м3.
30
Механические способы рыхления мерзлого грунта достаточно
разнообразны и применяемые для этого машины могут быть
классифицированы по характеру разрабатываемого объекта на следующие
группы:
Машины для разработки котлованов и вскрышных работ.
Машины для разработки траншей.
Машины для бурения шпуров и скважин.
Применительно к разработке грунтов способы резания можно
разделить на два основных вида (рисунок 1.11): разрезанием и резание с
отделением стружки. Различают их по положению режущего клина
относительно направления движения и поверхности массива.
Рисунок 1.11 Основные виды резания грунта:
а, б – резание; в — резание с отделением стружки
У клина, режущего с отделением стружки, кромка движется в
грунтовом массиве, а грани при измерении в плоскости нормальной к
поверхности массива и совпадающей с направлением резания, образуют с
последним угол, больше π/2, но меньше π. В этом случае касательная к
траектории какой-либо точки режущей кромки не пересекает тело
инструмента.
У разрезающего клина кромка пересекает поверхность массива, а грани
его расположены так, что в пересечении с поверхностью массива одна из них
образует с направлением резания угол больше π/2, но меньше π, а вторая —
больше π, но меньше π/3 (углы отсчитываются в одном направлении).
Производственный опыт показал, что разработка грунтов резанием с
отделением стружки, по сравнению с другими способами механической
разработки, требует наименьших затрат энергии. Поэтому преобладающее
число типов землеройных машин устроено и действует именно по принципу
резания с отделением стружки (экскаваторы, скреперы, бульдозеры,
грейдеры и др.).
Таким образом, основным способом механической разработки грунтов
является резание с отделением стружки. Но в этом способе разработки
имеются также разновидности в зависимости от его геометрических условий.
Основными геометрическими условиями отделения грунтовой стружки,
определяющими разновидность способов механической разработки грунтов,
предлагается считать положение кромки режущего клина относительно на-
31
правления резания и поверхности массива, очертание режущей кромки,
очертание и количество рабочих поверхностей режущего клина, число
поверхностей так называемого бокового среза и так называемых
блокированных поверхностей среза.
В зависимости от положения режущей кромки относительно
направления резания различают прямоугольное или обычное, и косоугольное
резание с отделением стружки (рисунок 1.12, а, б). При этом резание может
осуществляться клином с прямолинейной, ломаной или криволинейной
режущей кромкой (рисунок 1.12, а—г) и с одной, двумя или несколькими
плоскими или криволинейными рабочими гранями (рисунок 1.12, а, д—и).
Существенное различие условий процесса резания заключается в числе
поверхностей среза и блокированных поверхностей (таблица 1.1).
Из таблицы видно, что разница в коэффициенте напрямую зависит от
поверхности угла свободного скола грунта. Причем в случае свободного
резания поверхности данного скола с обеих сторон резца стремятся к 0 и не
оказывают дополнительного сопротивления боковым режущим кромкам.
Рисунок 1.12 Разновидности резания с отделением стружки:
а— прямоугольное плоским клином; б— косоугольное плоским клином,
в— прямоугольное плоским клином с режущей кромкой, очерченной по
ломаной линии; г— то же, но по выпуклой кривой; д, е— двух- и
трехгранным клином; ж, з, к— косое резание криволинейным клином;
и— прямоугольное резание криволинейным клином.
С другой стороны, при щелевом резании с обеих сторон имеет место
максимальное сопротивление резанию, так как свободные сколы полностью
отсутствуют. При использовании резцов различной формы на одной фрезе,
ни одна представленная схема в чистом виде не работает, так как при таком
способе фрезерования резцы взаимодействуют не со свободной
поверхностью мерзлого грунта, а с поверхностью, имеющую сложные
геометрические параметры.
Чаще всего резцы на рабочих органах осуществляют резание мерзлого
грунта по промежуточным положениям, по так называемым переходным
схемам резания. Степень их отличия от стандартных схем может быть
оценена двумя параметрами: расстоянием от стенки забоя до боковой
поверхности резца ТР и глубиной резания h. Эмпирические зависимости
32
изменения силы резания от данных параметров приведены в таблице 1.1 и на
рисунке 1.13. Параметр Z является показателем степени переходности схемы
резания и равняется ТР/h.
Все названные разновидности резания применяются в производстве.
Однако наиболее простым и распространенным способом резания является
прямоугольное с отделением стружки клиновидным ножом с плоской
рабочей поверхностью (рисунок 1.12, а). Такой способ резания лежит в
основе конструкции резцов рабочих органов подкопочной машины,
исследуемой в данной диссертации.
Рисунок 1.13 Зависимость коэффициента блокировки от геометрических
параметров среза для переходных видов резания:
1– от полублокированного к блокированному; 2– от свободного к
полублокированному; 3– от щелевого к блокированному; 4- от
полублокированного в угле к полублокированному; 5– от блокированного в
угле к блокированному; 6– от щелевого к блокированному в угле; 7– от
свободного к блокированному.
1.5. Обзор исследований, учитывающих влияние скорости на рабочие
процессы дорожно-строительных машин
Приоритет в исследовании влияния скорости на процессы разрушения
грунта, среди отечественных исследователей принадлежит В. П. Горячкину
[41]. Он рассматривал это влияние в условиях полусвободного резания грунта.
33
Таблица 1.1- Схемы резания и коэффициенты блокированности резания
34
Продолжение таблицы 1.1
35
Установив, что при увеличении скорости резания плугом от
0,4 до 2,0 м/с сопротивление почвы резанию увеличивается на 12%, автор
считает, что необходимо учитывать влияние скорости резания в тех случаях,
когда отбрасываются в стороны значительные массы грунта.
А. Н. Зеленин [56,57] исследовал изменение усилий резания мерзлых
грунтов на повышенных скоростях. В процессе экспериментальных исследований, проводимых на специальном стенде, скорость резания изменялось в
интервале от 0,68 до 6,13м/с. Резание осуществлялось острыми резцами
шириной 10 и 20мм с углами резания 30°; 45°; 60°; 90° и задним углом 10".
Некоторые результаты экспериментов приведены на рисунке 1.14. Анализ
зависимостей показывает, что усилие резания возрастает с увеличением
скорости, но по закону близкому к линейному. Влияние скорости на усилие
резания более заметно проявляется с увеличением угла резания, температуры
грунта и глубины резания. Усилие резания возрастает в среднем на 5-8% на
каждую единицу увеличения скорости. Исследования А. Н. Зеленина
направлены главным образом на определение энергоѐмкости ударного
разрушения мѐрзлых грунтов различными рабочими органами. Вопросы
пространственного разрушения и физическая сущность протекающих при
этом процессов в работах А.Н. Зеленина не отражены.
Ю.А. Ветров [23 - 26], исследуя вопросы влияния скорости на
процесс резания грунтов, пришел к выводу, что рост сопротивления грунта
резанию, при увеличении скорости, обусловлен условиями механики
процесса, то есть затратами энергии на сообщение движения вырезанному
грунту и физическими причинами, проявляющимися в изменении свойств
грунта под воздействием рабочих органов, движущихся с большой скоростью.
Им была предложена формула:
Р КИН
S CP sin cos 2
sin
(1.10)
где Sс - средняя площадь поперечного среза; - плотность грунта; - угол
резания; - угол наклона площадки скольжения; - скорость движения
рабочего органа; PКИН- величина усилия на отбрасывание вырезанного
грунта.
Ю. А. Ветров высказал предположение, что различие между
разностью полной силы резания и силы отбрасывания при определѐнной
скорости, и силой резания при скорости близкой к нулю является
доказательством имеющих место физических изменений в грунте. Было
установлено, что как полная сила резания, так и еѐ часть, расходуемая на
отбрасывание вырезанного грунта близки к квадратичной функции от
скорости резания (рисунок 1.15).
Эксперименты, проводимые с маятниковой установкой на талой и
замерзшей глине, показали, что в пределах изменения скорости резания
от 2,0 до 12м/с сопротивление грунта резанию существенно возрастает,
достигая 5-6 кратного увеличения по сравнению с сопротивлением
резанию при скорости близкой к нулю.
36
Рисунок 1.14 Влияние скорости резания на сопротивление резанию
мерзлых грунтов; суглинок, влажность 20 %, температура t'= - 40 С:
1 - при h = 8,2 мм; 2 - при h = 20 мм; 3 - при h = 28 мм.
Эти закономерности подтвердились в серии опытов на пылеватом
суглинке в грунтовом канале ЦНИИС, влажность которого находилась
в пределах 15-18 %, а прочность равнялась 3-5 ударам ударника
ДОРНИИ.
Рисунок 1.15 Зависимость силы резания грунта от скорости резания по
Ю. А. Ветрову
Наличие физических факторов Ю. А. Ветров [26] объясняет не
мгновенным деформированием под нагрузкой. Это обусловливает
протекание процесса разрушения грунта с некоторой конечной скоростью.
При малой скорости резания скорость отделения элементов стружки от
массива больше скорости резания, поэтому нож встречает своей верхней
частью куски грунта, уже успевшие отделиться от массива. Если скорость
резания больше скорости разрушения грунта, то рабочему органу
приходиться продвигаться через не разрушившуюся среду, преодолевая
сопротивления большей величины, чем при малой скорости. Однако модели
37
грунта, адекватно описывающей подмеченные закономерности изменения
процесса резания при увеличении скорости, Ю. А. Ветров не предложил.
Ю.А. Ветров, В. Л. Сокович, и Я. И. Марчеванский в работе [23]
рассматривали вопросы взаимодействия с грунтом на высоких скоростях
разрезающего ножа кабелеукладчика. Исследования проводились в полевых
условиях на суглинистом грунте с верхним растительным слоем, глубина
прорези варьировалась от 40 до 80см при изменении скорости движения
машины в интервале 1-6м/с. Испытателями установлено, что сила
сопротивления грунта разрезанию существенно увеличивается с возрастанием скорости. Так с увеличением скорости с 1,25м/с до 6м/с усилие прорезания подрастало на 55 %.
Увеличение рабочих скоростей изменяет режим разрушения, при этом
зона разрушения превышает зону внедрения рабочего органа, увеличивается
мгновенная прочность среды, уменьшается величина относительной
объѐмной деформации грунта, а следовательно, и энергия разрушения.
Основной принцип (эффект) динамического (скоростного) разрушения
грунтов и горных пород: увеличение рабочей скорости приводит к
увеличению хрупкости грунтов, предела прочности среды, сопротивления
разрушению, снижению величины работы разрушения, а значит, и
энергоѐмкости процесса, и проявлению усталостной прочности среды.
А. Б. Филяков [119] проводил экспериментальные исследования по
определению зависимости сопротивлений внедрению рабочих органов в
среду от скорости их движения. По его мнению, при внедрении деформатора
(ножа) в изотропную среду на него со стороны среды будет действовать сила
сопротивления внедрению, возникающая на торце и силы трения,
действующие на боковых поверхностях ножа. Неравномерное движение
ножа А. Б. Филяков описывает дифференциальным уравнением:
mx N 2FTP G , где, m и G- масса и вес ножа; x - линейное ускорение ножа.
Процесс внедрения ножа исследовался при различных глубинах резания
(от 0 до 25см), масса ножа варьировалась от 40 до 100кг через 20кг.
Основные закономерности установленные Л. Б. Филяковым заключаются в
следующем:
1. На начальной стадии внедрения ножа имеет место линейный
характер зависимости сопротивления среды от роста скорости движения;
2. При внедрении ножа в более плотные слои материала происходят
сложные сдвиговые деформации материала, вызывающие более
значительное сопротивление передвижению ножа, скорость движения
уменьшается;
3. При достижении средой максимального значения сопротивления
скорость внедрения ножа становится постоянной при неизменной нагрузке,
то есть возникает явление, напоминающее текучесть;
4. При остановке ножа резко снижается нагрузка, снижение
сопровождается совершенно неупругим взаимодействием материала с
ножом.
38
В П Станевский [33] ввѐл понятие критической скорости, подразумевая
под этим скорость резания, соответствующую скорости разрушения грунта.
Основываясь на результатах исследовании среднемаксимальных сил резания:
S sin cos 2
P m P CP
,
sin
(1.11)
rдe m- коэффициент влияния скорости резания, равный 1+/КР.
Критическая скорость резания автором рекомендовалось брать из
соотношения:
КР РЕЗ
2С cos
sin
sin
sin
sin .
(1.12)
При КР коэффициент влияния cкopocти резания m будет больше,
чем 2, поэтому сила сопротивления резанию становится в два раза больше по
сравнению с очень медленным резанием.
В качестве параметра, характеризующего физико-механические
свойства грунта, В. П. Станевскнй предлагает также величину скорости
распространения пластических деформаций, связанную со скоростью
резания следующей зависимостью:
Д
sin
sin .
(1.13)
Тогда величина критической скорости будет выражаться через
скорости разрушения, деформации и резания, как:
КР
РЕЗ
Д
.
(1.14)
Характер процесса резания будет зависеть от соотношения скоростей
разрушений и деформирования. В. П. Станевский делает вывод [33], что при
ДКР происходит хрупкое разрушение грунта без остаточных деформаций,
предварительно сжатый клином грунт будет в виде сплошной ленты
отделяться от массива. В качестве модели грунта В.П. Станевским принята
модель однородной изотропной среды. В начале процесса резания, при
медленном внедрении в массив, нож создает в нем сложное напряженное
состояние, разрушение грунта происходит не только перед клином, но и по
сторонам (рисунок 1.16) с образованием боковых расширений прорези.
Предполагается, что во время резания грунта угол между линиями
скольжения и поверхностью массива, незначительно отклоняется от угла
скола . Под этим же углом наклонены и образующие конических
поверхностей к плоскости массива
39
Рисунок 1.16 Схема блокированного резания острым ножом
Передней частью ножа сжимается находящейся перед ним грунт и в
месте контакта развиваются пластические деформации. По мере увеличения
поверхности контакта ножа с грунтом возрастает касательные напряжения, и
при превышении соответствующих предельному состоянию, происходит
сдвиг поверхности скольжения, наибольшей величины пластические
деформации достигают на поверхности разрушения ST.
Анализ исследований В. П. Станевского показывает, что, несмотря на
значительный прогресс в попытке описать влияние скорости на процесс
резания грунта и интересные результаты, автор остается на позициях статики
сыпучей среды. Однако следует отметить, что характер разрушения мерзлого
грунта рабочим органом ближе всего подходит к математической модели
В.П. Станевского.
Вопросы влияния скорости резания на характер пространственного
разрушения грунта при вертикальном резании глубоко исследованы в
работах, проведенных под руководством В. Г. Белокрылова [13].
Экспериментальные исследования, проведенные на стенде СибАДИ, в
частности показали, что:
1. Разработка грунтов вертикальным резанием (сколом) может
являться одним из перспективных направлений в области землеройных
машин.
2. При увеличении скорости резания от 1 до 6м/с
пространственность процесса вертикального резания в глинистом грунте
уменьшается за счет увеличения угла развала прорези и уменьшения
глубины расширяющейся части прорези.
Дальнейшая работа по исследованию влияния скорости на процесс
вертикального резания грунта, как считают исследователи, должна быть
направлена на расширение диапазона скоростей с исследованием их влияние
не только на пространственность процесса, но и на возникающие при этом
сопротивления и энергоемкость разрушения грунта при вертикальном
резании [13].
Влияние скорости движения бульдозера на величину интенсивности
возрастания сопротивления копанию грунта исследовал А. М. Холодов [120].
Результаты теоретических исследований и экспериментальные данные,
40
полученные для различных грунтов полигона ХАДИ, показали уменьшение
интенсивности возрастания сопротивления копанию отвалом от агрегатной
скорости бульдозера.
Актуальность вопроса влияния скорости на технико-экономические
показатели рабочего процесса ДСМ нашла также свое отражение в работах
Г.Д. Романюка [33] при исследовании рабочего процесса роторного
траншейного экскаватора, Д. Делета (МНР) [33], А. И. Демиденко [68],
A. Е. Самойлова, [68] и Завьялова А.М. [68] при исследовании процесса
копания грунта скрепером и бульдозером [5], Т. Н. Стоговой [2] при
исследовании навесного оборудования бульдозерного типа, Л. М. Лукина
[35] при оптимизации черпания сыпучего материала фронтальным
погрузчиком.
Кроме рассмотренных автором, вопросы влияния скорости на процесс
разрушения грунта рассматривали в своих работах В. И. Баловнев [13], А.И.
Крившин [74], Н. Г. Домбровский [51], а также ряд зарубежных ученых
[131].
Таким образом, вопрос, связанный с учетом влияния скорости,
динамических
и
кинематических
характеристик,
на
процессы
взаимодействия со средой рабочих органов ДСМ, всегда, вследствие своей
важности, были в поле зрения исследователей. Тем большую актуальность
они приобретают в наше время, когда всѐ острее встаѐт проблема
эффективности [74] применения машин.
Выводы по главе1
В данной главе озвучена история изучения вопроса в области резания
мерзлых грунтов, а также представлен краткий обзор научных работ,
посвященных разрушению мерзлых грунтов, из которого следует, что на
данный момент нет единого мнения о закономерности изменения усилия
резания от конструктивных особенностей рабочего органа землеройной
машины. Использование формул разных авторов затруднительно из-за
отсутствия данных по выбору входящих в них коэффициентов. Вследствие
того, что формулы базируются на зависимость, полученную А.Н. Зелениным,
между сопротивлением грунта резанию (усилием резания) и числом ударов
ударника ДорНИИ, их результаты нельзя считать абсолютно точными. Т.к.
сам А.Н. Зеленин указывал на то, что шкала сопротивляемости мерзлых
грунтов резанию не является абсолютно точной, а имеет целью получения
численных значений удельных сопротивлений резанию и показаний
ударника ДорНИИ, необходимых для инженерных расчетов.
Представлены физико-механические свойства мерзлых грунтов,
полученные различными авторами для различного гранулометрического
состава в разных условиях: в зависимости от влажности и температуры
грунта.
41
Также представлены способы разработки мерзлых грунтов, из которых
наименее энергоемким является механических способ разработки мерзлого
грунта резанием и отрывом.
Приведенный в первой главе анализ
работ,
посвященных
исследованию физико-механических свойств мерзлых грунтов, а так же
процессов разработки мерзлых грунтов - позволил выделить круг вопросов,
подлежащих разрешению.
Установлено, что на основе теоретических и экспериментальных
исследований, разработана и широко применяется математическая модель
взаимодействия режущих элементов с разрушаемым опорным основанием,
разработанная отечественными учеными [2,5,13,23-26,41,68,74,85,122 и др.].
При этом вопрос изменения формы боковых граней разрабатываемого
грунта в зависимости от скорости резания не рассматривался ни одним
автором.
Исходя из вышесказанного, была поставлена цель исследования разработка методики выбора рациональных конструктивных параметров и
режимов работы рабочего органа машины, предназначенной для удаления
мерзлого грунта из-под магистральных трубопроводов с учѐтом изменения
усилия резания в зависимости от скорости резания и способа расстановки
резцов.
В соответствии с поставленной целью в настоящей работе решались
следующие задачи.
1. Разработать математическую модель разрушения мерзлого грунта
специальным рабочим органом подкопочной машины, отличительной
особенностью которой будет являться учѐт изменения формы боковых
граней забоя в зависимости от скорости резания.
2. Разработать методику выбора рациональных параметров рабочего
органа.
3. Получить зависимости между изменением конструктивных параметров
подкопочных машин и энергоѐмкости процесса резания.
4. Показать области рационального использования машин, обладающими
теми или иными конструктивными особенностями.
42
ГЛАВА 2.
ИССЛЕДОВАНИЕ ПРОЦЕССОВ ВЗАИМОДЕЙСТВИЯ
ДИСКОФРЕЗЕРНОГО РАБОЧЕГО ОРГАНА С МЁРЗЛЫМ ГРУНТОМ
При построении математической модели взаимодействия рабочего
органа подкопочной машины с мерзлым грунтом были сделаны следующие
допущения:
физико-механические свойства мерзлого грунта постоянные по всему
объѐму;
движение машины - прямолинейное и равномерное;
процесс резания рассматриваем только в плоскости, перпендикулярной
оси вращения рабочего органа.
учитывается только сила сопротивления фрезерованию мерзлого
грунта без учета силы сопротивления движению машины.
Дополнительные допущения будут оговорены в процессе изложения.
Разрушение мерзлого грунта рабочим органом осуществляется при
помощи двух относительно независимых движений роторов – вращательного
и поступательного. Схема разработки грунта рабочим органом (двумя
фрезами) подкопочной машиной, представлена на рисунке 2.1.
Разрушение мерзлого грунта рабочим органом подкопочной машины
имеет ряд отличий от ранее применяемой математической модели
разрушения мерзлого грунта одной концевой фрезой при разработке
траншей:
Рабочий орган подкопочной машины представляет собой две дисковые
фрезы, расположенные симметрично относительно вертикальной оси
машины, вращающиеся во взаимно противоположные направления.
Фрезерование мерзлого грунта происходит не в сплошном массиве, как
было в ранее применяемой математической модели, а разрушается
часть мерзлого грунта, расположенного под трубопроводом с
открытыми боковыми стенками.
Основным отличием предлагаемой математической модели является
учѐт изменения поверхности разрушения мѐрзлого грунта, а именно
боковых стенок забоя при прохождении следующего резца, а не только
за счѐт введения коэффициента блокированности резания, как это
имело место в моделях, применяемых ранее.
Согласно [132] динамику системы в общем виде описывает система
неоднородных дифференциальных уравнений второго порядка:
M mc V (t ) C mc V (t ) K mcV (t ) F Pm , H mc , G,V (t ),W (t ),V (t T ),W (t T );
M d W (t ) C d W (t ) K d W (t ) F Pm , H mc , G,V (t ),W (t ),V (t T ),W (t T ),
(2.1)
43
Рисунок 2.1 Схема разработки грунта рабочими органами
подкопочной машиной (встречное фрезерование)
где V(t) и W(t)— векторы динамических перемещений по степеням свободы
фрезы и разрабатываемого грунта соответственно; Mmc Cmc Kmc— матрицы
масс, демпфирования и жесткости, описывающие модель фрезы;
Md, Cd, Kd— матрицы масс, демпфирования и жесткости, описывающие
модель разрабатываемого грунта; F- вектор усилий резания, действующий на
фрезу и зависящий от параметров разрабатываемого материала (Pm),
маршрута, режима разработки и движения подачи (Hm), геометрии фрезы и
поверхности (G), а также динамических перемещений фрезы в текущий
момент времени (V(t), W(t)) и с заранее неизвестным отставанием по
времени (V(t-T), W(t-T)).
При совпадении неподвижной системы координат, с поверхностью
разрабатываемого материала уравнение примет вид:
M mc V (t ) Cmc V (t ) K mcV (t ) F Pm , H mc , G,V (t ),W (t ),V (t T ),W (t T ),
(2.2)
Для описания модели фрезы и ее положения относительно поверхности
мерзлого грунта введем следующие системы координат и углы наклона [132],
как показано на рисунке 2.2: xyz— система координат конечно-элементной
модели разрабатываемого грунта; x′′ y ′′ z ′′ и x′ y ′ z ′— соответственно
вращающаяся и невращающаяся система координат, связанная с фрезой,
причем оси z′ и z′′ совпадают с осью фрезы; η— угол между осью фрезы и
осью z ; ξ— угол между осью y и проекцией оси фрезы на плоскость xy ;
(t ) — угол поворота фрезы вокруг своей оси.
44
Рисунок 2.2 Системы координат для модели фрезы
Поскольку
процесс
пространственного
резания
необходимо
анализировать при общих условиях, будем рассматривать каждую режущую
кромку как набор точек, соединенных прямыми отрезками (рисунок 2.3, а). В
этом случае усилия для каждого отрезка режущей кромки вычисляем
независимо в соответствии с выбранной феноменологической моделью. При
таком подходе отсутствуют ограничения по сложности геометрии режущих
кромок и ориентации фрезы в пространстве.
Геометрию режущей кромки можно определить соотношениями:
z f1 (r );
st f 2 ( z, r ).
(2.3)
устанавливающими расположение всех точек, с помощью которых зададим
режущие кромки резцов в цилиндрической системе координат
(ось z′ совпадает с осью фрезы). Для дальнейшей работы с моделью фрезы
понадобится преобразовать координаты точек к системе координат x′ y ′ z ′.
Координата z′ остается без изменений, для вычисления координат x′ и y′
воспользуемся формулами:
xi" ri cos ist ;
yi" ri sin ist ,
(2.4)
45
Рисунок 2.3 Схема геометрической модели фрезы:
а- дискретизация режущей кромки; б, в- компоненты усилий резания,
действующих на элемент режущей кромки.
Для описания взаимодействия фрезы и разрабатываемой среды
необходимо привести координаты точек фрезы к системе координат, в
которой дана поверхность, с помощью соотношений:
x" x f
x
"
y T y y f
z
z" z
f
,
(2.5)
где x f , y f , z f T — вектор смещения фрезы относительно обрабатываемой
поверхности за счет движения подачи; T— матрица поворота, определяется
для введенных на рисунке 2.2 систем координат и углов соотношением:
46
C C S C C
T C C S C C
S C
S C C C S
S S C C C
C S
S S
S C
C
(2.6)
Здесь C cos , S sin . Согласно расчетной схеме динамической
модели, предполагается движение фрезы по двум степеням свободы в
плоскости, перпендикулярной оси фрезы. Это допустимо в случае, когда
отсутствует необходимость учитывать изгиб оси фрезы в геометрической
модели. Движение фрезы описывается первым дифференциальным
уравнением системы (2.1). Усилия резания в правой части уравнения должны
быть записаны в системе координат x′y′z′. Размерность системы зависит от
числа учитываемых собственных частот колебаний фрезы. В результате
интегрирования уравнений движения системы в каждый момент времени
T
получим вектор смещений фрезы по степеням свободы V xm/ y m/ . Для того
чтобы проинтегрировать уравнения движения (2.1), вычислим усилия
резания, действующие на режущие кромки фрезы в процессе разработки. При
этом следует опираться на значения толщины срезаемого слоя, определенные
для каждой точки на режущей кромке фрезы с помощью алгоритма
геометрического моделирования. Толщину срезаемого слоя для каждой
точки модели режущей кромки фрезы вычисляем в направлении средней
линии n между направлениями нормали n1 и n2 к двум отрезкам режущей
кромки, примыкающим к выбранной точке дискретизации (рисунок 2.3, б).
Элементарные усилия косоугольного резания, действующие на отрезок
режущей кромки, определим по толщине срезаемого слоя с помощью
различных феноменологических методик [132]. В рамках предлагаемого
алгоритма моделирования можно использовать как линейные, так и
нелинейные соотношения. Усилия, действующие на элементы режущей
кромки, преобразуем к общей системе координат фрезы x′y′z′, используя
следующее преобразование (индекс i 1 , i опущен для краткости):
dFx / C S1
dFy / S S1
dF / C
1
z
S
C
0
C C1 dFr
S C1 dFt ,
S1
dFa
(2.7)
где — текущий угол положения отрезка режущей кромки фрезы с учетом
вращения и геометрии режущей кромки, его определяем приближенным
соотношением:
ii1 t ist1 ist / 2.
(2.8)
Полные усилия, возникающие в зоне резания, найдем из суммирования
по всем отрезкам режущих кромок:
47
Fx / N N dFx /
f
p
F
y / dFy /
F / f 0 i 1 dF /
z
z
f
,
(2.9)
i 1,i
где N f — число режущих кромок фрезы; N p — число точек разбиения по
длине режущей кромки. Первые две компоненты вектора усилий,
определенного соотношением (2.9), используем при интегрировании
дифференциального
уравнения движения фрезы. Для интегрирования
уравнений движения разрабатываемой поверхности требуется определить
усилия, действующие со стороны фрезы на разрабатываемую поверхность в
системе координат поверхности, по формуле:
C
Fx
Fy S
F
0
z
C S
C C
S
S S Fx /
S C Fy /
C
Fz /
(2.10)
Алгоритм геометрического моделирования. При моделировании
многоосевого фрезерования значительную сложность представляет
определение усилий резания. Усилия резания главным образом зависят от
мгновенного значения толщины срезаемого слоя, и параметров
разрабатываемого материала. И поэтому ввиду затруднения, высокой
геометрической сложности аналитической формулировки зависимости
толщины срезаемого слоя от времени, в данном случае в литературе
рекомендуют
применять
численные
алгоритмы
геометрического
моделирования.
2.1. Особенности работы дискофрезерного рабочего органа при удалении
мѐрзлого грунта из-под трубопровода
Разрушение грунта дискофрезерным рабочим органом осуществляется
при помощи двух относительно независимых движений фрезы –
вращательного и поступательного. При этом возможны две схемы работы
подкопочной машины (рисунок 2.1):
а) – схема попутного (обратного) фрезерования, когда движение резца
в зоне резания начинается от края забоя и разрабатывается примерно до его
середины;
б) – схема встречного (прямого) фрезерования, когда движение резца
начинается от середины забоя.
Второй способ обладает некоторыми преимуществами перед первым, а
именно:
1. нагрузка на резце, связанная с увеличением толщины снимаемой
стружки, обусловлена движением машины вперѐд, нарастает
постепенно;
48
2. вертикальная составляющая реакции грунта направлена вперѐд, что
обеспечивает дополнительное прижатие рабочего органа к
разрабатываемой поверхности, что положительно влияет на динамику
движения машины;
3. вынос стружки осуществляется на дневную поверхность забоя,
значительно уменьшая количество частиц грунта в зоне забоя.
Следует отметить, что схема обратного фрезерования имеет
единственное преимущество – для обеспечения рабочего процесса требуется
меньшее значение тягового усилия. При этом следует помнить, что в этом
случае просто происходит перераспределение усилий с рабочего
оборудования на движитель и наоборот, а суммарный энергетический баланс
машины остаѐтся неизменным.
Основным отличием в работе дискофрезерного рабочего органа под
трубопроводами от работы на грунтах, описанных в работах [13,33], является
то, что только в этом случае рабочий орган осуществляет нарезание сквозных
щелей.
Поэтому схема работы, при данной технологии резания, является
полностью оригинальной (рисунок 2.1). Из рисунка видно, что расстояние LH
от боковой поверхности забоя до нижней точки траектории движения резца
будет больше толщины разрабатываемого грунта- Н. Данное обстоятельство
является причиной следующих особенностей:
1. угол К контакта фрезы зависит от расположения фрезы
относительно забоя;
2. при входе резца в забой подача на него не равна 0 и зависит от
геометрических параметров контакта фрезы, забоя и скорости
движения машины.
Расположение фрезы относительно мѐрзлого грунта характеризуется
углом между линией, соединяющей точку контакта фрезы с боковой
поверхности забоя с центром фрезы и вертикальной осью той же фрезы.
Минимальное значение данного угла определяется конструкцией
подкопочной машины и соответствует максимальному заглублению рабочего
органа в мѐрзлый грунт.
Связь данного угла с линейными параметрами рабочего органа может
быть выражена условием:
D 2 Lb
.
D
(2.11)
2 H D cos
.
D
(2.12)
arccos
Следующей важной характеристикой процесса фрезерования мерзлого
грунта дисковой фрезой является угол входа резцов в забой, для которого
верно соотношение:
arccos
И, наконец, последний угловой параметр – угол контакта фрезы с
забоем определяется из выражения:
49
К .
(2.13)
Зная угол контакта фрезы легко определить количество резцов,
находящихся в забое:
z
K Kn
,
P 2
(2.14)
x a b sin
,
y
a
b
cos
(2.15)
где Р – угол расстановки резцов, а n – число зубьев на фрезе. Так как число
резцов в забое обычно не равняется целому значению, то данный результат
означает, что максимальное количество резцов в забое соответствует
ближайшему большему целому числу, а минимальное число – ближайшему
меньшему целому числу. Кроме того, дробная часть показывает, сколько
времени (в процентном отношении) в забое находится максимальное число
резцов.
Особенности процесса резания, обусловленные кинематическими
параметрами, вытекают из характера траектории движения режущей кромки
резца, которая в результате сложения вращательного и поступательного
движений представляет собой циклоиду. Циклоида- линия, которую
описывает точка М, расположенная на расстоянии d от центра круга радиуса
a, катящегося без скольжения по прямой (рисунок 2.4). Если d=a, циклоида
называется обыкновенной, d>a- удлиненной циклоидой (трохоидой), d<aукороченной циклоидой. Согласно рисунка 2.4 характер траектории
движения кромки резца представляет собой удлиненную циклоиду или
трохоиду. Параметрическое уравнение трохоиды имеет вид:
Поэтому согласно рисунка 2.1 координаты любой точки траектории
кромки резца определяется системой уравнений:
)
VP ,
y R(1 cos i )
x R(sin i VП
(2.16)
Скорость резания у дисковых фрез значительно больше скорости
подачи, что даѐт основание принимать длину дуги контакта резца с забоем
равной длине дуги окружности. Ошибка при этом составляет 4% [33], что,
практически, исключает влияние на конечный результат расчѐтов
взаимодействия дискофрезерного рабочего органа с мѐрзлым грунтом. При
этом сами расчѐты становятся значительно проще.
Толщина стружки, снимаемой резцом, определяется траекторией
движения режущей кромки резца и представляет собой расстояние между
двумя поверхностями резания, образованными режущими кромками двух
соседних резцов, измеренное по нормали к поверхности резания. Для
50
определения еѐ величины наиболее приемлемым является уравнение,
предложенное Фишером [33] :
(2.17)
hi S Z sin i ,
где SZ – величина подачи на один резец.
Рисунок 2.4. Виды циклоид
где R – радиус фрезы по резцам, V – скорости, с индексом п – скорость
подачи, а с индексом р – резания, i – угловая координата положения кромки
резца на траектории.
2.2. Моделирование величины усилия резания на единичном резце
Процесс
резания
обычно
рассматривается
как
процесс
упругопластического деформирования материала. Причем упругие
деформации предшествуют пластическим, так как возникают у лезвия в
момент, предшествующий его вхождению в разрезаемый материал.
Количественное соотношение между этими видами деформаций
зависит от свойств материала и скорости нагружения. Для каждого материала
существует своя максимальная скорость течения пластической деформации
V0, которая может рассматриваться как мера пластичности. Можно
предположить, что при течении пластической деформации со скоростью
\/1 V0 тело будет разрушаться аналогично хрупким материалам.
При фрезеровании мерзлого грунта в режимах работы дисковых фрез
пластические деформации, как правило, не успевают происходить, и
разрушение носит хрупкий характер. В этих условиях предел упругости и
предел прочности мерзлого грунта близки друг к другу. На этом основании к
расчету сил резания можно подойти, используя теорию О. Мора. Он дал
общую формулировку условия, при котором начинается пластическая
51
деформация или хрупкое разрушение. По его теории- это состояние
наступает тогда, когда касательное напряжение в плоскостях сдвига
достигает предельной величины (зависящей от нормальных напряжении σ в
плоскости сдвига) или когда наибольшее напряжение растяжения достигает
предельного значения для данного материала.
Рисунок 2.5 Схема взаимодействия режущего элемента рабочего органа с
мерзлым грунтом
При перемещении клина в разрабатываемой среде (рисунок 2.5) на его
передней и задней поверхностях возникают нормальные силы и силы трения.
Для машин фрезерного типа силы, действующие на заднюю поверхность
резца, воспринимаются узлом его крепления. Силы же, действующие на
переднюю поверхность, производят отделение стружки, поэтому будут
интересовать лишь последние.
По теории Мора разрушение материала происходит по плоскости
скольжения АВ, (рисунок 2.5), для которой:
τ=Со±σ·tgρ [МПа],
(2.18)
где Со – сцепление или напряжение, отвечающее началу пластического
течения материала (будем считать его постоянным по плоскости
скольжения), МПа;
52
ρ – угол внутреннего трения материала;
σ – значение нормального напряжения на поверхности скольжения, МПа;
знак «+» для деформации сжатия;
знак «–» для деформации растяжения.
Теория разработки прочных грунтов и минералов отмечает, что сила
резания зависит не только от площади, угла и скорости резания, но и от
степени свободы боковых поверхностей среза. Данный параметр носит
название блокированность резания, о чем подробно было рассказано в п.1.4
первой главы.
Таким образом, согласно принятой математической модели, общая
сила резания мерзлого грунта одним резцом может быть определена из
следующего выражения [68, 69,74]:
n
h
m
Р РЭТ 1 b 0,01 (1 k (t 5) ) (1 V ) 1 ( 40o ) 2 , (2.19)
q
где: РЭТ– эталонная сила резания мерзлого грунта (Н), получаемая при
резании мерзлого грунта толщиной h=0,01 (м), резцом шириной b=0,01
(м), угле резания =40, скоростью резания V=1 (м/с), при температуре
мерзлого грунта -5°С.
t– модуль температуры мерзлого грунта на момент испытаний;
Коэффициенты n = 0.47, q=0,01 (м), =0.865 (1/м), m, =0.1 (c/м), и
=3,2*10-3(1/град2) характеризуют степень зависимости изменения
силы резания от изменения соответственно глубины резания, ширины
резца, температуры, скорости резания и угла забоя;
k– коэффициент, характеризующий зависимость прочностных
свойств мерзлого грунта от температуры (1/град);
- коэффициент блокированности резания (см. таблицу 1.1).
Объѐм разрушения в боковых частях прорези напрямую связан с
количеством блокированных поверхностей среза и наличием вблизи полосы
будущей прорези местных концентраторов напряжений в виде борозд,
ослабляющих связь с массивом отделяемой части. Указанные факторы,
влияющие на объѐм и характер разрушения по бокам разрабатываемого
участка, объединяются понятием «степень блокирования среза». Из
множества форм поперечного сечения прорези наиболее характерные по
степени блокирования срезания показаны в главе 1 настоящей работы.
Некоторые из приведѐнных схем в классификации других авторов имеют
различные наименования.
При рассмотрении выражений, описывающих условия резания,
обращает на себя внимание, что влияние блокированности резания
различными учѐными исследуются по-разному. Так А.Н. Зеленин [56]
учитывает степень блокированности среза введением сомножителя ,
Ю.А. Ветров [26] путѐм добавления к усилию свободного резания двух
слагаемых, характеризующих силы, необходимые для разрушения среды в
боковых расширениях прорези и для преодоления сопротивления срезу
53
боковыми рѐбрами ножа. При рассмотрении усилия резания автором было
предложено использовать выражение вида:
Р=Аhn,
(2.20)
где различным видам блокировки соответствуют различные значения
показатели степени.
Многочисленными исследователями [68,74,85] было установлено, что
сила резания по свободной схеме на 45-50% меньше силы блокированного
резания и на 25-30% - полублокированного. Считается, что каждая
блокированная сторона увеличивает суммарное сопротивление резания на
40%. Данные показатели объясняются тем, что в боковых частях прорези
удельное сопротивление значительно меньше, чем перед лобовой частью.
Полагая параметр n чисто геометрическим и считая свойства
разрабатываемого материала зависящими от его некоторого параметра В,
модель может быть представлена в виде:
(2.21)
P BA(n, b)h n
Для описания всех режимов резания с точки зрения геометрических
параметров степенной показатель n должен быть принят функцией
расстояния Т между соседними линиями резания и толщиной стружки h
(рисунок 2.6): n=n(T,h). Затем, по методу С.М. Белоцерковского [33]
выражение было приведено к следующему виду:
A
n
n
A n n
P Bh n (
h)
b A( T h) ln h An (2.22)
b
T
h
n T h
Для использования данного выражения в практических расчетах
необходимо знать вид функции n=n(T,h). На рисунке 2.6 представлено
семейство кривых, отражающих вид рассматриваемой функции в различных
режимах. Индексы при n обозначают виды резания: щ– щелевое;
бу– блокированное в угле; б– блокированное; пб– полублокированное;
с– свободное.
В различных работах в основу идеи установления зависимостей,
описывающих переход от блокированного к другим видам резания, был
заложен гиперболический характер уменьшения силы сопротивления
резанию профиля ножа при изменении его расстояния до открытой
поверхности. В результате анализа большого количества известных
экспериментальных данных по резанию различных видов материалов было
установлено существование безразмерной функции L(l) (рисунок 2.7), где
l– характерный геометрический параметр среза, представляющий собой либо
ширину b, либо глубину h.
С учѐтом вышеизложенного, силу резания можно представить
следующими уравнениями:
Для блокированного резания:
P1 100CL(b) L2 (h) .
(2.23а)
54
Рисунок 2.6 Графики зависимости параметра блокировки
от технологии резания (Романов)
Рисунок 2.7 Функция L(l) для мѐрзлых грунтов
55
Для полублокированной схемы резания:
L(b)
.
L(b) L(h )
(2.23б)
P3 100CL(h) L2 (b) .
(2.23в)
P2 P1
Для подрезания массива:
Для внедрения профиля в массив (для прокола):
P4 P1
L( b ) L( h )
.
L( h )
(2.23г)
Для определения усилий резания в переходных режимах были
предложены следующие расчѐтные зависимости:
P12 P1
L(b) L(h)th
b
h
L(b) L(h)
a
L(h) L(b)th
b
P32 P3
L(b) L(h)
b
L(b) L(h)th
h
P43 P4
L(b) L(h)
a
L(h) L(b)th
b
P41 P4
L(b) L(h)
(2.24)
Нетрудно убедиться, что при b=0- Р1-2=Р2, Р4-3=Р3; при a=0- Р3-2=Р2,
Р4-1=Р1. Следует отметить, что все эти выражения получены на основание
логических рассуждений, в таком виде, что с учѐтом установленной
зависимости, определяющей влияние открытых стенок на силу
сопротивления резанию, она преобразуется в формулу для определения
усилий при резании по блокированной схеме.
У крайних зубьев прорези (рисунок 2.6) совмещаются только с одной
стороны, поэтому при проведении расчѐта для них в выражении
необходимо отказаться от множителя 2 перед высотой стружки. При резании
взаимодействующими зубьями в траншее с плоским дном внешними
рѐбрами крайних зубьев необходимо преодолевать сопротивления боковому
срезу по всей глубине резания. Поэтому сила бокового среза с внешней
стороны крайнего зуба достигнет следующей величины:
Рбок.ср mбок.ср h3
1
.
1 k бок
(2.25)
По сравнению с силой бокового среза при обычном блокированном
резании увеличение силы сопротивления составит величину:
mбок h3
k бок
.
1 k бок
(2.26)
56
При резании взаимодействующими зубьями в траншее с гребѐнчатым
дном, по сравнению с условиями работы по предыдущей схеме
сопротивление резанию возрастает в результате увеличения объѐма
материала, отделяющегося между зубьями. Сила для преодоления
сопротивления материала разрушению в промежутках между зубьями
определится из уравнения:
Р3.бок 2а3h3
mбок
.
k ctg
2
бок
(2.27)
По сравнению с силой сопротивления разрабатываемого материала
разрушению при блокированном способе резания изменение может составить
2mбок h3 (
a3
h3 ) раз.
2
k бок
ctg
Дальнейшим
развитием
теорий,
взаимодействия
резца
с
разрабатываемым материалом, учитывающем характер нахождения резца в
забое, может считаться выражение, предложенное учѐными Киевского
инженерно-строительного института [68,69] :
Pp (1 k )k v ( mcb bh kmбок h 2 kmбок.св h об FсрV 2
sin cos
) , (2.28)
sin( )
где K - температурный коэффициент, Fср– площадь поперечного сечения
среза, V– скорость резания, - угол резания, - угол скола.
Разница в усилии фрезерования напрямую зависит от поверхности угла
свободного скола мѐрзлого грунта . Причѐм в случае свободного резания
поверхности данного скола с обеих сторон резца стремятся к 0 и не оказывают
дополнительного сопротивления боковым режущим кромкам. С другой
стороны, при щелевом резании с обеих сторон имеет место максимальное
сопротивление резанию, так как свободные сколы полностью отсутствуют. При
использовании резцов различной формы на одной фрезе, ни одна
представленная схема в чистом виде не работает, так как при таком способе
фрезерования резцы взаимодействуют не со свободной поверхностью ледового
покрова, а с поверхностью имеющей сложные геометрические параметры.
Коэффициент блокированности зависит от стесненности
прохождения резца в забое. Для основных видов резания, показанных в
таблице 1.1, там же приведены его значения.
Значения коэффициента блокированности реза в переходных видах
резания получены на основе отдельно экспериментов как функция =f(z), в
которой в качестве аргумента принят параметр z=T/h. Согласно
исследованиям [68] эта функция имеет вид:
=А+В e –kz .
(2.29)
*
В этой формуле значение А равно величине при ТТ , а параметр В
представляет разность между значениями соответствующими основными
видами резания. Т*- величина Т, при которой можно пренебречь влиянием
стенки.
57
В результате обработки результатов опытов автором работы [68] были
получены величины коэффициентов, входящих в зависимость (2.29) для всех
переходных видов резания. Значения коэффициентов приведены
в
таблице 2.1.
Таблица 2.1- Коэффициенты формулы (2.29) для переходных видов резания
мѐрзлых грунтов.
Вид переходного резания
1. От полублокированного к
блокированному (таблица 1.1)
2. От свободного к
полублокированному (таблица 1.1)
3. От
щелевого
к блокированному
(таблица 1.1)
4. От
полублокированного в угле к
полублокированному (таблица 1.1)
5. От блокированного в угле
к блокированному (таблица 1.1)
6. От щелевого к блокированному
(таблица 1.1)
7. От свободного к блокированному
(таблица 1.1)
Значение
А
1,0
Значение
В
0,25
Значение
k
0,5
0,75
0,25
0,59
1,9
0,9
1,8
1,2
0,45
1,56
1,2
0,2
1,44
1,5
0,5
1,05
1,0
0,5
1,2
Так как сравнивать энергоѐмкость процесса резания корректно только
в одинаковых условиях (при одинаковой производительности, скорости
резания и температуры), то следует сделать вывод о том, что при помощи
расстановки резцов суммарная сила резания может измениться на величину,
равную:
N
Z
1 (b
i
i 1
1) i
1 (b 1)
(2.30)
Или, для эталонного резца, шириной 1см, выполняемого блокируемое
резание данная зависимость примет вид:
N
Z 1 (bi 1) i
(2.31)
i 1
Так как показатель зависит от таких параметров как ширина
разработки грунта и толщина снимаемой стружки, однозначного решения
данного уравнения для всех случаев разработки грунтов найдено быть не
может. Возможно лишь нахождение частных минимумов для различных
условий работы. Так если скорость резания будет очень высока, то толщина
снимаемой стружки будет стремиться к 0, тогда уравнение 2.29 примет вид:
=А+В, тогда заменив один резец, выполняющий блокируемое резание
двумя, которые будут выполнять полублокированное резание, получим
58
зависимость изменения энергоѐмкости, показанный на рисунке 2.8.
Рисунок 2.8 Относительное изменение усилия резания мѐрзлого грунта при
переходе со схемы блокированного резания одним резцом к схеме
полублокированного резания двумя резцами:
1 – суммарная сила резания на рабочем органе; 2 и 3 -силы резания,
развиваемые единичными резцами
Полученные данные свидетельствуют, что в рассматриваемой схеме
резания величина силы резания от распределения ширины резания каждым
резцом не зависит. Зависимость энергоѐмкости от коэффициента изменения
усилия резания от ширины резца показана на рисунке 2.9.
Рисунок 2.9 Относительное изменение усилия резания мѐрзлого грунта от
коэффициента изменения усилия резания от ширины резца:
1- для схемы резания с удвоенным количеством резцов;
2- для схемы резания с утроенным количеством резцов;
3- для схемы резания с учетверѐнным количеством резцов
Таким образом, переход со схемы блокированного резания одним
резцом на схему с полублокированным резанием двумя резцами, при
скоростном фрезеровании грунта не является экономически целесообразным,
59
так как данная схема обладает определѐнными энергетическими
преимуществами, только если коэффициент изменения усилия резания на
данном грунте превышает величину, равную 0,99. Однако, при превышении
значений данного параметра показателя 1, количество резцов по ширине
забоя должно быть увеличено на столько, насколько позволяют их
прочностные параметры. При разработке грунта крупным сколом
энергоѐмкость процесса для большинства разрабатываемых массивов
уменьшается. Для мѐрзлых грунтов в графическом виде данная зависимость
показана на рисунках 2.10 и 2.11.
Рисунок 2.10 Относительное изменение усилия резания от толщины
снимаемой стружки:
1 – для резцов одинаковой ширины; 2 – для резцов разной ширины
Рисунок 2.11 Относительное изменение усилия резания от прочностных
свойств разрабатываемого грунта (от коэффициента изменения усилия
резания от ширины резца):
60
1- для относительной толщины снимаемой стружки равной 0
(скоростное резание);
2- для относительной толщины снимаемой стружки равной 0,5;
3- для относительной толщины снимаемой стружки равной 1,0;
4- для относительной толщины снимаемой стружки равной 2,0
Когда на фрезе чередовать узкие и широкие резцы сила сопротивления
широкому резцу подчиняется законам щелевого резания, а узкого–
переходного. В случае приближения ширины обоих типов резцов к одному
типоразмеру нагрузки на узких резцах приближаются к нагрузкам,
соответствующим щелевому резанию, а при значительных различиях– к
блокированному. На рисунке 2.12 показаны расчѐты изменения
энергоѐмкости разрушения мерзлого грунта фрезами с различными
способами установки резцов. Из рисунка 2.12 видно, что если применять
фрезы с узкими резцами по краям разрабатываемой прорези, а широкими
резцами разрабатывать середину забоя. То энергоѐмкость процесса
разрушения мерзлого грунта может быть снижена в 2-3 раза. При этом
ширина крайних резцов ограничивается только условиями устойчивости
резца. Для обеспечения указанного процесса необходимо, чтобы режущие
кромки разных резцов устанавливались на фрезе на разных диаметрах: узкие
боковые– на большим диаметре, а широкие средние на меньшем. При этом
разница в диаметрах должна соответствовать величине подачи фрезы, за
угол поворота, равному углу установки резцов.
В случае, когда величина подачи будет больше установленного
расстояния между режущими кромками центральный резец начнѐт
осуществлять не свободное резание, а переходное от свободного к
блокированному, а боковые резцы– от щелевого к блокированному в угле.
Когда же величина подачи будет меньше указанного расстояния,
эффективность фрезерования снизится за счѐт увеличения поверхностей
среза ледяного массива широкими центральными резцами.
Зависимость изменения энергоѐмкости процесса разрушения мерзлого
грунта, специальной фрезой от точности соблюдения величины подачи
показано на рисунке 2.13.
Из рисунка 2.13 видно, что скорость вращения фрезы для случая
установки резцов на одном диаметре не влияет на энергоѐмкость процесса
резания. При установке резцов по схеме № 3 (рисунок 2.12) расстояние
между диаметрами установки резцов должно соответствовать расстоянию,
проходимому технологическим средством на минимальной технологической
скорости, за время необходимое фрезе, для поворота на угол установки
зубьев. Для схемы установки зубьев № 4 (рисунок 2.12) определяющей
является максимальная технологическая скорость.
61
Рисунок 2.12 Изменение энергоѐмкости разрушения мерзлого грунта от
способа установки резцов:
1– фреза с последовательно установленными резцами одинаковой
ширины; 2– фреза, у которой первый резец осуществляет щелевое резание,
а второй– полублокированное в угле; 3– фреза с резцами, установленными
по схеме 2 с дополнительным центральным резцом, удаляющим целик
способом свободного резания; 4– фреза с центральным резцом,
производящим щелевое резание и двумя боковыми, режущими мѐрзлый
грунт способом полублокированным в угле
Рисунок 2.13 Зависимость изменения энергоѐмкости процесса разрушения
мерзлого грунта от изменения величины подачи на 1 зуб и вылета резца
(номера схем установки резцов соответствуют рисунку 2.12; в 4 схеме
использованы резцы одинаковой ширины)
62
2.3. Моделирование разрушения грунта подкопочной машиной при
применении схемы ступенчатого забоя
В настоящее время, наиболее распространѐнной схемой разрушения
мѐрзлого грунта является его разработка методом сплошного забоя, как это
показано на рисунке 2.14 а и б. При этом повышение эффективности резания
обеспечивается за счѐт формирования забоя с минимум боковых площадок
скола грунта, образующихся слева и справа от забоя при его фрезеровании.
Согласно рисунка 2.12 таким способом (рисунок 2.14 а и б) можно
повысить эффективность фрезерования на 20% вне зависимости от скорости
разработки грунта. Следующим развитием данной теории является схема,
предложенная И.А. Гасениным (рисунок 2.14 в) [33] , который предложил
оставлять часть грунта не разрабатываемой, чтобы данный объѐм разрушался
под действием сил тяжести, боковых составляющих резания и прочих
побочных сил резания.
а
б
в
Рисунок 2.14 Существующие методы разработки мѐрзлого грунта
а)- сплошным забоем одним резцом; б) сплошным забоем двумя и более
резцами; в) по схеме, предложенной И.А. Гасениным.; цифрами указана
последовательность разработки резцами забоя
В этом случае отрыв части перемычки от грунтового массива
происходит ступенчато. Угол поворота фрезы, при котором происходит
процесс врезания резца в грунт, находится в пределах от 4 до 10 градусов и
зависит от типа грунта.
Сопротивление мерзлого грунта разрыву в 5-7 раз меньше
сопротивления сжатию, вследствие чего, энергоемкость разрушения
перемычки грунта между фрезами за счет изгибающих усилий уменьшается
63
на данном участке в несколько раз, что дает общее повышение
эффективности разработки мерзлого грунта на 10-12%.
Однако, при синхронизации скоростей движения машины и при
применении резцов, расположенных на разных радиусах вращения фрезы
можно добиться снижения энергоѐмкости разрушения грунта в 2-3 раза
(рисунок 2.12). Для этого необходимо, что бы сначала резцами прорезались
две узкие боковые щели, а затем широким резцом удалялась средняя часть.
При этом удаление средней части будет происходить с меньшей скоростью и
с большей подачей в условиях свободного резания, как это показано на
рисунке 2.15.
Рисунок 2.15 Предлагаемая схема фрезерования грунта
Следует отметить, что предлагаемая схема может быть реализована
только в условиях строгой синхронизации скорости движения машины и
скорости вращения фрезы. При этом каждой скорости движения машины
должна соответствовать фреза со строго определѐнными геометрическими
параметрами. То есть предлагать такую конструкцию для обычных машин
для разработки льда и мѐрзлого грунта не целесообразно. При этом для
машин по ремонту и содержанию трубопроводов, где скорости движения
являются постоянными, такая схема резания грунта наоборот является
наиболее рациональной.
2.4. Моделирование геометрических параметров забоя
Режущие кромки резцов рабочих органов подкопочных машин, при
работе описывают сложную траекторию, являющуюся сочетанием
вращательного движения вокруг оси фрезы и поступательного движения со
скоростью подачи. Траектория каждого резца представляет собой
удлиненную циклоиду (трохоиду), параметрическое уравнение которой в
64
принятых координатах (рисунок 2.16) выражается в следующем виде:
X=R*(1-cos);
(2.32)
Y=r*+R*sin ,
(2.33)
где r- радиус производящего круга, катящегося без скольжения по прямой
АВ, R- расстояние от оси вращения фрезы до режущей кромки резца, или
радиус фрезы, - угол поворота производящего круга, отсчитываемый от
положения, в котором точка М совпадает с начальной точкой А.
Одним из характерных параметров удлиненной циклоиды является
отношение:
Rr
(2.34)
Через этот параметр уравнения 2.32, 2.33 можно представить в
следующем виде:
Х=R*(1- cos);
(2.35)
Y=R*(sin).
(2.36)
Из рисунка 2.16 видно, что сечение среза ЕА`M`B`FME в
горизонтальной плоскости представляет собой фигуру серповидной формы.
Толщина среза изменяется от нуля до максимума и от максимума снова до
нуля.
Силовые и энергетические параметры фрезерования в значительной
степени зависят от толщины среза, поэтому при определении этих
зависимостей очень важно знать истинную величину последней. Толщина
среза представляет собой кротчайшее расстояние от любой текущей точки
трохоиды до участка трохоиды, описанного резцом при предыдущем обороте
фрезы, то есть расстояние по нормали к предыдущему участку трохоиды.
После подстановки соответствующих значений
из уравнений
(2.35–2.36) и соответствующих преобразований получим уравнение нормали
к трохоиде:
Y=-((sin1/+cos)(R*sin(1+1/))1/+cos+R/ .
(2.37)
Для того чтобы вычислить истинную толщину среза по углу поворота
фрезы, необходимо, задаваясь углом ' из уравнений последующего участка
трохоиды определить координаты 1 и 1 точки M`:
1Rcos`;
(2.38)
1R`)sin`.
(2.39)
Затем, подставляя координаты точки M` в уравнение (2.37) нормали,
определить величину угла соответствующего точки M.
Подставляя значение угла в уравнение предыдущего участка
трохоиды можно определить координаты и точки М:
Rcos;
(2.40)
R sin.
(2.41)
Наконец, зная координаты точек М и М`, можно определить истинную
толщину среза как расстояние между двумя точками:
Sист=((Y1-Y)2+(X1-X)2)1/2.
(2.42)
Следует отметить, что режущий элемент вступает в забой не в т. А'
65
(рассматриваем последующий участок трохоиды), соответствующей углу
` =0, а несколько ранее в т. Е, когда угол < 0 (отрицателен), и выходит из
зоны резания не в т. В, когда '=1800, а несколько позже - в F, когда >180 .
Рисунок 2.16 Траектории движения резцов рабочего органа подкопочной
машины фрезерного типа, согласно предлагаемой схеме фрезерования
Точки Е и F носят название узловых точек трохоиды. Эти узловые
точки представляют собой вершины гребешков, не срезанных при
66
фрезеровании (рисунок 2.16, заштрихованные зоны АА`ЕА и ВВ`FВ).
Поэтому, для вычисления истинной толщины среза на всем диапазоне от
начала врезания резца до выхода его из забоя, необходимо сначала
определить положение узловых точек Е и F, то есть величины углов 1 и 2.
Из теории циклоиды известно, что точка Е лежит на пересечении трохоиды с
прямой у=r, а точка F на прямой у=2r. Решая уравнения прямых
совместно с уравнениями (2.28 и 2.29), получим значения углов 1 и 2:
sin ; 1; sin; 2 1 . Из рисунка 2.16 видно, что
за один оборот фрезы каждый резец снимает стружку переменной толщины и
участвует в процессе резания на длине дуги, превышающей 1800.
Исходя из вышесказанного, можно сделать вывод, о том, что для
вычисления истинной толщины среза можно пользоваться простой и
удобной, формулой (2.17), введя в нее поправочный коэффициент:
Sист=Кп*Sz*sin=(Sz*sin)/Кд.
(2.43)
Подсчеты показали, что величины Кд и Кп зависят лишь от и не
зависят в отдельности ни от R, ни от r. Это дает возможность использовать
величины коэффициентов Кд и Кп, подсчитанные при определенных
значениях , для различных фрезерных рабочих органов, работающих с
разнообразными подачами.
Если в каждом поперечном сечении фрезы установлено не один, а m
резцов, то трохоида получается m- заходной, и толщиной среза следует
считать кратчайшее расстояние от точки трохоиды, описываемой
последующим резцом до точки трохоиды, описанной предыдущим резцом
(по нормали к последней). При этом метод подсчета истинной толщины среза
остается тем же, только уравнение последующего участка трохоиды
(уравнение 2.38 и 2.39) примут вид:
1=R*(((`+2/m)/)+sin`);
(2.44)
1=R(1- cos`).
(2.45)
Согласно предлагаемой схеме фрезерования, траектория средних
широких резцов, также представляет собой удлиненную циклоиду
(трохоиду). Отличие заключается в том, что расстояние от оси вращения
фрезы до режущей кромки резца или радиус фрезы R1 меньше, чем радиус
фрезы R боковых резцов.
Так как скорость резания направлена по касательной к траектории
движения режущей кромки резца и по величине определяется
геометрической суммой окружной скорости вращения фрезы (по режущей
кромке резца) ωυ·R и скорости поступательного движения подкопочной
машины (скорости подачи) Vп.
На рисунке 2.17 представлена схема для определения скорости и углов
резания в зависимости от угла поворота фрезы υ.
По правилу параллелограмма скорость резания будет равна:
Vp
2
Vп
ωф2 R 2 2 ωф RVп cos ,
(2.46)
67
Эта формула показывает, что скорость резания при фрезеровании
является переменной величиной. При υ=0 скорость резания равна
π
арифметической сумме Vп и ωυ·R, при υ= она равна Vп2 ωф2 R 2 , а при
2
υ=π– арифметической разности Vп и ωυ·R.
Рисунок 2.17 Расчетная схема для определения угла и скорости
резания при фрезеровании мерзлого грунта, согласно предлагаемой схеме
фрезерования
Согласно предлагаемой схеме фрезерования, скорость резания средних
широких резцов будет равна:
Vp1
2
Vï
ωô2 R 2 2 ωô R Vï cos ,
1
1
(2.47)
где R1 - расстояние от оси вращения фрезы до режущей кромки среднего
широкого резца.
Из результатов расчетов можно сделать вывод, что скорость
поступательного перемещения машины составляет примерно 0,02 - 0,6 % от
68
величины окружной скорости вращения рабочих органов при различных
режимах работы подкопочной машины.
На основе полученных результатов построим график зависимости
скорости резания от угла поворота фрезы при максимальной скорости
поступательного перемещения машины (рисунок 2.18).
Углы резания, также изменяются в зависимости от υ. Из рисунка 2.17
следует, что кинематический угол резания равен:
= ст–υ+ψ [град],
(2.48)
Рисунок 2.18 Зависимость скорости резания от угла поворота фрезы:
1 - для радиуса фрезерования, равного 2,0м;
2- для радиуса фрезерования, равного 1,5м;
3 – для радиуса фрезерования, равного 1м
где ст– статический угол резания, т.е. угол между передней гранью резца и
касательной к окружности фрезы по режущим кромкам резцов (этот угол
часто называют углом при установке резца на корпус фрезы).
Из рисунка 2.17 видно, что угол ψ можно представить как:
R sin
,
(2.49)
tg
R cos r
Выразив ψ из (2.49) и подставим эти значения в уравнение (2.48). В
результате получим следующее выражение:
ñò arctg
R sin
S
R cos
2 π
,
(2.50)
На основе полученных результатов построим график зависимости
углов резания от угла поворота фрезы (рис. 2.19).
Из результатов расчета углов резания следует, что при различных
конструктивных параметрах фрезы и режимах работы подкопочной машины
изменение углов резания составляет от 0 до 0,5 %. Следовательно, за углы
резания можно принять статические углы резания.
69
Рисунок 2.19 Зависимость кинематического угла резания от угла поворота
фрезы υ при статическом угле СТ в 45°:
1 - для радиуса фрезерования, равного 2,0м;
2- для радиуса фрезерования, равного 1,5метра;
3 – для радиуса фрезерования, равного 1м
2.5. Общие положения математической модели взаимодействия рабочего
органа дискофрезерной подкопочной машины с мѐрзлым грунтом
Для
получения
математической
модели
взаимодействия
дискофрезерного рабочего органа (рисунок 2.20) с мерзлым грунтом были
приняты допущения, оговоренные в начале данной главы. За основу
формирования усилий на рабочем органе было принято выражение,
полученное И.А. Гасениным [33], описывающие процесс взаимодействия с
разрабатываемой поверхностью единичного резца при различных
технологиях резания. Кроме того, были учтены и дополнительные факторы,
связанные с конструктивными особенностями рабочего органа, такими как
направление вращения фрезы, еѐ диаметр, количество установленных на ней
резцов, установка резцов на разных диаметрах и так далее. Кроме того, при
разработке математической модели были учтены и природно-климатические
условия проведения работ, к каким относятся влажность, температура и
гранулометрический состав разрабатываемой поверхности и так далее. Таким
образом, было получено суммарное выражение для определения усилий,
воздействующих на рабочий орган подкопочной машины в процессе
фрезерования мѐрзлого грунта. Так как в итоговое выражение вошло более
чем 30 исходных параметров, то решение поставленной задачи было
возложено на ЭВМ. Для чего была разработана специальная программа в
среде Matlab, текст которой приведѐн в приложении 2.
70
Рисунок 2.20 Схема разработки грунта рабочими органами
подкопочной машиной (встречное фрезерование)
Полученное выражение позволяют определить силу резания на каждом
резце, находящемся в забое, в зависимости от его положения. Суммируя
данные показатели на всех резцах, можно получить параметры
энергоѐмкости разрушения мѐрзлого грунта подкопочной машиной:
n
n
i 1
i 1
М КР РРЕЗ (i ) R P1РЕЗ (i ) R1 ,
n
n
i 1
i 1
РГ РРЕЗ (i ) cos i P1РЕЗ (i ) cos i
N фр
VП
2
2
Pр ( )d
0
(2.51)
,
(2.52)
i
2
VP
M ( )d
D 0 KP
.
(2.53)
Полученные результаты, с использованием специальной программы в
среде Matlab, приведены на рисунках 2.21-2.23.
На рисунке 2.21 приведѐн график изменения крутящего момента за
один оборот фрезы диаметром 1,37метра с 18 зубьями одинаковой толщины.
При этом угол резания составлял 40 градусов, скорость резания– 3,27м/с,
скорость подачи– 1км/час, ширина прорези– 0,1метра, толщина мерзлого
грунта– 0,75метра, температура воздуха– минус 200С. Из рисунка видно, что
фреза в процессе работы будет подвергнута значительным динамическим
нагрузкам. Крутящий момент будет меняться от 5,5кНм до 8кНм. Разница
составит 68%. При этом точка А на рисунке соответствует началу
взаимодействия нового резца с мѐрзлым грунтом.
71
Рисунок 2.21 Изменение крутящего момента на фрезе в процессе
фрезерования мѐрзлого грунта
Величина крутящего момента на это время равная 6,4кНм
обеспечивается резанием грунта тремя резцами, находящимися в данный
момент в забое. Увеличение силы резания и, соответственно, крутящего
момента от дополнительного резца составит 1.2кНм, для условия резания
мѐрзлого грунта при температуре 00С. Увеличение нагрузки на фрезе в
данный момент времени иллюстрирует участок АБ на рисунке, когда
нагрузка возрастает практически мгновенно. Заглубление резца под
действием подачи машины приводит к линейному росту нагрузки на рабочем
органе, который иллюстрируется участок БВ на графике рисунок 2.21. В
точке В происходит выход из забоя одного из резцов, в результате чего в
забое остаѐтся только три резца, а нагрузка на фрезе падает пропорционально
силе резания верхнего слоя грунта. В нашем случае мгновенное уменьшение
нагрузки составит 2,5кНм, что проиллюстрировано участком ВГ на рисунке
2.21. В дальнейшем три резца срезая всѐ более толстую стружку, в результате
поворота фрезы, будут способствовать линейному увеличению нагрузки, о
чѐм свидетельствует участок ГА на рисунке 2.21. И, наконец в точке А
происходит внедрение в мѐрзлый грунт четвѐртого резца и весь процесс
повторяется.
На рисунках 2.22 и 2.23 приведены вспомогательные графики,
иллюстрирующие тот же процесс. На рисунке 2.22 показано изменение
горизонтальной силы, действующей на фрезу, а на рисунке 2.23 – усилие
подачи.
72
Рисунок 2.22 Характер изменения горизонтальной силы, действующей на
фрезу в направлении движения машины, в зависимости от еѐ угла поворота
Мощность на фрезерование может быть определена как произведение
крутящего момента на скорость вращения фрезы, а мощность на создание
тягового усилия – как произведение скорости движения на величину этой
силы:
Рисунок 2.23 Характер изменения усилия подачи, в зависимости от угла
поворота дисковой фрезы
Тогда для нашего расчѐтного случая данное выражение примет вид:
NФР=0,0405*10048+31506=0,407кВт+31,506кВт=31,913кВт.Мощность,
затрачиваемая на перемещение подкопочной машины с рабочим органом,
также зависит от параметров резания. Данный факт объясняется наличием
горизонтальной силы резания. Причѐм собственно на перемещение фрезы
составляет 20Вт и на преодоления сопротивления от вертикальной силы–
30-100Вт, что составляет 0,5% от суммарного сопротивления резания. Так
как данная величина находится далеко за границами погрешности измерений
73
при проведении эксперимента, с целью упрощения расчѐта еѐ учѐт
проводиться не будет. На рисунке 2.24 показана зависимость изменение
мощности фрезерования от толщины разрабатываемого слоя грунта.
Рисунок 2.24 Зависимость изменения мощности фрезерования от
толщины разрабатываемого слоя мерзлого грунта
Из рисунка 2.24 видно, что зависимость мощности фрезерования от
толщины забоя носит ярко выраженный линейный характер.
Предложенная структура математической модели может считаться
развитием идей профессора Ю.А. Ветрова [26] о разделении зоны резания на
отдельные части применительно к процессам резания мерзлого грунта.
Отличием модели, от структуры профессора Ю.А. Ветрова является
отсутствие члена, описывающего срез мерзлого грунта боковыми гранями
резца и учѐт зависимости усилия от угла резания сомножителем по
отношению ко всему остальному выражению.
2.6. Влияние неравномерности скорости резания мерзлого грунта
подкопочной машиной на энергоемкость его разрушения
Резание мѐрзлого грунта дискофрезерным рабочим органом имеет ряд
особенностей, обусловленных физико-механическими свойствами грунта,
кинематическими параметрами рабочего процесса и расположения рабочего
органа относительно разрабатываемой поверхности в процессе еѐ
разрушения.
При этом фрезы, в процессе работы подвергаются значительным
динамическим нагрузкам (рисунок 2.21-2.23).
Следует отметить, что важнейшим параметром, характеризующим
процесс фрезерования является величина затрат энергии на осуществление
74
данного процесса. Так как, энергозатраты, связанные с разрушением слоя
грунта, имеют две составляющие, то существует необходимость
параллельного расчѐта затрат мощности как на фрезерование мерзлого
грунта, так и на усилие подачи (выражение 2.53).
Из выражения 2.53 видно, что существующие методы расчѐта
мощности фрезерования слоя мѐрзлого грунта, основываются на том, что
скорость резания является постоянной величиной. В действительности
скорость резания направлена по касательной к траектории движения
режущей кромки резца и по величине определяется геометрической суммой
окружной скорости вращения фрезы (по режущей кромке резца) ωυ·R и
скорости поступательного движения подкопочной машины (скорости
подачи) Vп (рисунок 2.17).
Изменение скорости резания резца в забое будет напрямую зависеть от
взаимного расположения резца и забоя.
Продифференцировав уравнения (2.46) и (2.47) по углу поворота
фрезы, получим зависимость скорости изменения резания от угла поворота
фрезы:
2 ω RV sin
п
ф
2 V 2 ω 2 R 2 2 ω RV cos
п
п
ф
ф
dV
p
(2.54)
То есть уравнение 2.53 примет вид:
N фр
V
П
2
2
P ( )d
T
0
ωф RVп
D
2
0
sin M KP ( )
V ω R 2 2 ωф RVп cos
2
п
2
ф
d
(2.55)
Сравнительный анализ изменения мощности фрезерования показан на
рисунке 2.25 и 2.26.
Полученные результаты свидетельствуют о том, что вновь
предложенная зависимость позволяет уточнить мгновенную затрачиваемую
мощность при фрезеровании мѐрзлого грунта
на 40%, а среднюю
эффективную мощность фрезерования на 5%. Кроме того, данная
зависимость позволяет рационально расположить фрезу относительно забоя
для обеспечения меньших затрат на фрезерование, которые могут быть
снижены на 5-10%.
75
Рисунок 2.25 Изменение мощности фрезерования от угла поворота дисковой
фрезы:
1- ранее применяемая зависимость, 2 – разработанная зависимость
Рисунок 2.26 Относительное изменение расчѐтной мощности фрезерования
от угла поворота дисковой фрезы:
1- мгновенная, 2 – средняя за оборот
Выводы по главе 2
1. Разработана математическая модель взаимодействия рабочего органа
подкопочной машины, которая отличается способом установки резцов, в
76
2.
3.
4.
5.
виде, которая обеспечивает уменьшение энергоѐмкости разрушения
мѐрзлого грунта на величину до 20%. При этом режущие кромки резцов
должны устанавливаться на фрезе на разных диаметрах: узкие боковые–
на большим диаметре, а широкие средние на меньшим. При этом разница
в диаметрах должна соответствовать величине подачи фрезы, за угол
поворота, равному углу установки резцов.
Описаны и проанализированы основные факторы, влияющие на величину
нагрузок, как на единичном резце, так и на рабочем органе в целом,
получены зависимости суммарной силы резания от температуры грунта,
ширины резца, угла резания и величины подачи при разных вариантах
расстановки резцов на фрезе для разных типов грунтов. Из данных
зависимостей следует, что при увеличении ширины резцов, увеличении
подачи и при понижении температуры грунта суммарное усилие резания
увеличивается, а при углах резания 45-50 градусов (в зависимости от типа
грунта) суммарное усилие резания минимально.
Рассмотрены процессы изменения геометрических параметров резания
мѐрзлого грунта. Установлено, что в процессе скорость и угол резания
меняются на величину, не превышающую 0,5%, что находится в пределах
погрешности действительных значений скорости подкопочной машины и
установки резцов на фрезе, в связи с чем, в дальнейших исследованиях
изменение данных параметров в процессе фрезерования не учитывалось.
Установка двух, вращающихся навстречу друг другу фрез, установленных
на некотором расстоянии друг относительно друга, позволяет за счет
изгибающих усилий, возникающих от действия усилия резания, общее
повышение эффективности разработки мерзлого грунта на 10-12%. При
этом, чем шире крайний резец фрезы, обеспечивающей щелевое резание,
тем более толстая перегородка разрушается под его воздействием.
Вновь предложенные зависимости позволяют уточнить мгновенную
затрачиваемую мощность при фрезеровании мѐрзлого грунта на 40%, а
среднюю эффективную мощность фрезерования на 5%. Кроме того,
данная зависимость позволяет рационально расположить фрезу
относительно забоя для обеспечения меньших затрат на фрезерование,
которые могут быть снижены на 5-10%.
77
ГЛАВА 3.
МЕТОДИКА ОПРЕДЕЛЕНИЯ РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ
ФРЕЗЕРОВАНИЯ МЕРЗЛОГО ГРУНТА РАБОЧИМ ОРГАНОМ
ПОДКОПОЧНОЙ МАШИНЫ
3.1.
Общая методика выбора рациональных параметров
Следующим логичным шагом, который следует за разработкой
адекватной математической модели, является выбор таких конструктивных
параметров и режимов разрушения мерзлого грунта, которые обеспечивали
бы минимальное потребление энергии.
Методика выбора основана на определении сил, действующих на
рабочий орган подкопочной машины со стороны грунта и оценки влияния на
эти силы переменных данных, к которым относится: скорости машины и
конструктивные параметры рабочего органа.
Методика выбора рациональных конструктивных параметров рабочего
органа, представленная на рисунке 3.1 отличается от ранее разработанных
методик тем, что в ней осуществляется проверка на определение
максимально-допустимой величины колебаний скорости вращения фрез,
обусловленных как различной шириной резцов, так и установкой их на
разных диаметрах.
Наличие в забое разного количества резцов, и изменение параметра
энергоѐмкости резания в течение времени не позволяет для выбора
рациональных параметров применить стандартный приѐм, связанный с
дифференцированием исследуемого параметра и определения точки
экстремума его влияния на производительность, в связи с чем для решения
поставленной задачи применялись численные методы решения.
На основании вышеперечисленных расчетов и проверки на изменение
скорости вращения фрез, выбираются рациональные конструктивные
параметры рабочего органа и режимы разрушения мерзлого грунта, при
которых энергоемкость разрушения мерзлого грунта минимальная.
Необходимым условием обеспечения разрушения мерзлого грунта
рабочим органом является выполнение следующего условия:
FСЦ ≥ Pг ,
(3.1),
где FСЦ– сила сцепления захватов машины с трубопроводом,
Pг– усилие, необходимое для разрушения мерзлого грунта.
Рг включает в себя усилие, развиваемое гидроцилиндром для
продольного перемещения машины, с учетом силы трения при передвижении
машины по трубопроводу, и реакций со стороны грунта на рабочий орган.
Сила FСЦ определяется из расчета трубопровода на прочность.
Выполнение данного условия обеспечивает стабильность процесса
резания, предотвращая проскальзывание машины в местах захвата
трубопровода
78
Рисунок 3.1 Методика выбора рациональных конструктивных
параметров рабочего органа подкопочной машины
3.2. Определение рационального положения рабочего органа в забое
Одним из самых простых технологических решений, влияющих на
процесс разработки мѐрзлого грунта, является изменение положения
рабочего органа в разрабатываемой траншее. В случае, когда глубина
фрезерования максимальна для данного рабочего оборудования, его
расположение является единственно-возможным. Когда же толщина
разрабатываемого слоя грунта будет меньше максимальной толщины,
которую ещѐ способна прорезать дисковая фреза, появляется возможность
установить фрезу, либо максимально заглубив еѐ в забой, либо, наоборот,
максимально вынув еѐ из забоя (рисунок 3.2). Разница в параметрах резания
для этих и промежуточных случаев будет заключаться в разном направлении
действия сил резания. Таким образом, имеется возможность оценить
насколько велико влияние анизотропных свойств мѐрзлого грунта на весь
процесс фрезерования. Кроме того, направление действия силы резания
значительно влияет на величину усилия подачи.
Мерзлые грунты, как правило, характеризуются резко выраженной
анизотропией и неоднородностью распределения свойств, для оценки
которых используют обычно осредненные значения характеристик. В связи с
этим возникает необходимость расчленения неоднородного мерзлого массива
79
на объемы (слои, горизонты), в пределах которых распределение данного
свойства принимается однородным.
Результаты расчѐтов приведены на рисунке 3.3.
Проведѐнные исследования показали, что величина крутящего момента
довольно слабо зависит от места расположения рабочего органа. Только в
случае максимального поднятия рабочего органа его среднеинтегральная
величина увеличивалась на 10%. Таким образом, анизотропные свойства
грунта в данном случае сказывались на суммарной оценке взаимодействия
незначительно.
а
б
Рисунок 3.2 Схемы установки фрезы в забое:
а – минимальное погружение;
б – максимальное погружение
Гораздо больший интерес представляет изменение величины усилия
подачи, которая связана с силой резания косинусоидальным законом. Таким
образом, изменения в усилии подачи при разных способах установки
рабочего органа изменялись более чем в 20 раз (для толщины
разрабатываемого слоя грунта равной 0,5метра). Следует отметить, что чем
значительнее толщина забоя, тем незначительнее возможности изменения
положения рабочего органа, тем и незначительнее полученная разница в
расчѐтах. Так для толщины мерзлого грунта в 0,75метра изменение усилия
подачи не превысило 3 раз.
При этом, установка фрезы с максимальным заглублением в забой
отрицательно сказывается на конструктивной схеме двух фрез, между
которыми остаѐтся неразрабатываемый целик грунта, разрушаемый при
помощи изгибающих нагрузок. Поэтому в дальнейшем мы будем
рассматривать только схему с минимальным заглублением фрезы в забой.
3.3. Рациональные скорости резания
Скорость резания является одной из важнейших характеристик,
определяющих производительность, рассматриваемой техники. При этом,
как уже было сказано выше, определяющими процесс резания являются две
еѐ составляющие – скорость подачи и скорость вращения фрезы.
80
Особенностью определения рациональных скоростей резания является то,
что энергоѐмкость фрезерования в данном случае не может быть определена
с помощью только мощности.
Рисунок 3.3 Изменение мощности фрезерования
от положения рабочего органа
Это объясняется тем, что эти два параметра мощность и скорость подачи
напрямую связаны между собой. Поэтому, для определения рациональных
параметров
скорости
разработки
мерзлого
грунта,
необходимо
воспользоваться таким параметром как расход энергии на прорезание щели
определѐнной длины и ширины, данный параметр будет иметь размерность
кВт*с. Выбор рациональных условий резания при изменении остальных
параметров является возможным только с учѐтом постоянства скоростей
резания и подачи.
В качестве эталонного участка, для теоретических исследований,
направленных на определение рациональной скорости подачи рабочего
органа, примем длину траншеи равную 100м, тогда при скорости подачи
равной 1000м/час на прохождение 100метров потребуется 360 секунд, а при
скорости 100м/час – 3600секунд. Результаты расчѐта приведены на рисунке
3.4.
Из рисунка видно, что несмотря на уменьшение затрат мощности на
фрезерование (крутящий момент с уменьшением скорости подачи в 10 раз
снижается в 3.5 раза, а усилие подачи в 3 раза) общие энергозатраты
значительно увеличиваются. Критическими точками являются два значения
скорости. Первое – когда скорость движения машины равна 0. При этом,
несмотря на отсутствие сопротивления резанию положения, траншея никогда
не будет разработана, поэтому энергозатраты будут максимальны. И второе–
когда базовая машина обеспечивает максимально возможную скорость
81
движения (из условий возможности еѐ реализации движителем и
двигателем). В этом случае суммарные энергозатраты будут минимальны.
Таким образом, скорость подачи дисковой фрезы будем принимать
максимально возможной с учѐтом производительности всего комплекса
машин.
Результаты расчѐта изменения средней эффективной мощности
фрезерования мерзлого грунта, в зависимости от скорости резания
приведены на рисунке 3.5.
Рисунок 3.4 Изменение эффективности фрезерования мерзлого грунта в
зависимости от скорости подачи рабочего органа
Рисунок 3.5 Зависимость изменения средней эффективной мощности,
затрачиваемой на фрезерование мерзлого грунта от скорости резания
82
Из рисунка видно, что наиболее рациональным, с точки зрения
эффективности разрушения мѐрзлого грунта является
использование
силового резания, когда фрезерование происходит с использованием
значительных сил резания с большими подачами. Такой способ также носит
название разработки мерзлого грунта крупным сколом. Снижение же
энергоѐмкости процесса фрезерования объясняется склонностью мѐрзлого
грунта именно к хрупкому разрушению.
Однако, разрушать мерзлый грунт резцами, имеющими скорость
взаимодействия с разрабатываемой средой близкой к 0 сопряжено с
необходимостью развивать движителем значительное тяговое усилие,
зависимость которого от скорости резания показана на рисунке 3.6.
Рисунок 3.6 Изменение тягового усилия, развиваемого подкопочной
машиной, в зависимости от скорости резания мерзлого грунта
С уменьшением толщины забоя, разрабатываемого подкопочной
машиной, будет происходить и уменьшение силы резания, что позволит ещѐ
снизить энергоѐмкость разработки мерзлого грунта.
Отсутствие прямопропорциональной зависимости между скоростью
движения и толщиной разрабатываемого грунта объясняется двумя
факторами. Во-первых, отсутствием прямого соотношения между скоростью
резания и величиной необходимого тягового усилия. И, во-вторых,
изменением положения входа резца в забой в зависимости от соотношения
диаметра фрезы и толщины мѐрзлого грунта. Вопрос о выборе
рационального диаметра фрезы будет рассмотрен в дальнейшем. На данном
же этапе можно констатировать следующий факт: рациональными
скоростями резания являются такие, которые обеспечивают максимальную
скорость движения машины в сочетании с минимальными скоростями
вращения дисковой фрезы.
83
3.4. Определение рационального диаметра фрезы
Диаметр фрезы является одним из определяющих параметров при
формировании нагрузок при резании мѐрзлого грунта. От него зависит
величина крутящего момента, скорость вращения рабочего органа, величина
и направления нагрузок, действующих на резцы. При этом изменение
диаметра фрезы будет одновременно приводить как к процессам, позитивно
влияющим на снижение энергоѐмкости процесса фрезерования, так и к
негативным процессам. Поэтому задачами данного исследования является
установить какие из перечисленных процессах и при каких условиях
являются доминирующими.
Рассмотрим сначала позитивные процессы. С увеличением диаметра
фрезы, как это было показано в предыдущем пункте, улучшаются
геометрические характеристики входа резца в забой. В результате чего
появилась возможность снизить скорость вращения фрезы, характер
изменения которой показан на рисунке 3.7.
Таким образом, используя полученные зависимости между изменением
скорости резания и мощностью, затраченной на фрезерования, показанной на
рисунке 3.5 мы можем получить зависимость между энергоѐмкостью
процесса фрезерования и диаметром фрезы. Учитывая что затраты мощности
на фрезерование связаны со скоростью резания прямопропорциональной
зависимостью, то их характер будет аналогичен зависимости, показанной на
рисунке 3.5, только с изменѐнными коэффициентами.
Процесс повышения энергоѐмкости фрезерования, в случае увеличения
диаметра фрезы, связан с изменением ширины прорезаемой щели, между
шириной которой и затратами мощности существует взаимосвязь, показанная
на рисунке 3.8.
Отсутствие прямой пропорциональности у этой зависимости связано с
дополнительным ростом энергозатрат на разрушение боковых поверхностей
траншеи непосредственно режущей кромкой резца, путѐм скола. Так как
поверхность скола не имеет прямой зависимости от ширины траншеи, то и
суммарная зависимость будет иметь параболический вид.
Специфика работы дисковой фрезы состоит в том, что такой параметр
как ширина траншеи в задании на проектирование не нормируется. Толщина
резца определяется способностью рабочего органа не деформироваться под
действием возникающих нагрузок. Значительные геометрические размеры
фрезы и проводимые расчѐты позволяют сделать вывод о том, что у неѐ
имеется огромный запас прочности от изгибающих, крутящих и сжимающих
сил. Единственный возможный вариант выхода из строя диска фрезы
является потеря им устойчивости.
Уравнение проверки круглой пластины на устойчивость имеет вид
[108]:
84
2,55 * 10 5 ЕJ x
.
Р КР
2
D
(3.2)
Рисунок 3.7 Зависимости изменения минимально возможной скорости резания
мѐрзлого грунта от диаметра фрезы и толщины забоя
Рисунок 3.8 Взаимосвязь мощности, расходуемой на фрезерование мерзлого
грунта и ширины прорезаемой щели
Исходя из данного уравнения, можно вывести соотношение между
усилиями на фрезе, еѐ диаметром и толщиной. С учѐтом того, что
критическая сила для стали 45 без термической обработки равняется 11,8 кН,
модуль упругости равен 2,1*105мПа, а жѐсткость может быть определена из
85
выражения
Jx
D 3
12
, зависимость толщины диска от диаметра и
суммарной силы резания будет иметь следующий вид:
Pв2 РТ2
Р
.
0.000002
5000000 D
D
(3.3)
Так как величины вертикальных усилий зависят от скорости резания
мерзлого грунта, которая в свою очередь зависит от диаметра фрезы
(рисунок 3.7), то искомая зависимость примет вид, изображѐнный на рисунке
3.9.
Рисунок 3.9 Зависимость толщины диска фрезы от еѐ диаметра
Размеры подшипниковых узлов зависят от величины усилия резания и
от диаметра вала, который обычно находят из соотношения:
d валафрезы 3
М кр
0,1 кр
0,002583 М КР [96].
(3.4)
Так как величина крутящего момента является функцией от диаметра,
то возможно построение зависимости диаметра вала фрезы от еѐ диаметра.
Еѐ вид показан на рисунке 3.10.
Наличие на графике ступенек объясняется тем, что величина диаметра
вала является дискретной величиной, шаг изменения которой равняется 5мм.
С учѐтом вышеизложенного, а также, принимая во внимание геометрические
размеры подшипников, устанавливаемые на данные валы, с учѐтом нагрузки,
действующей на них со стороны рабочего органа, получим зависимость
ширины траншеи от диаметра фрезы, которая показана на рисунке 3.11.
86
Рисунок 3.10 Зависимость диаметров фрезы и еѐ вала
Следует отметить, что величина скорости резания также зависит и от
толщины прорезаемой щели. Поэтому поставленная задача не может быть
решена на основании нахождения функционального минимума при
исследовании зависимости только двух переменных, так как большинство
исследуемых параметров находятся между собой в постоянной явной и
неявной взаимосвязи, для определения оптимизированных параметров
необходимо определить безусловный минимум целевой функции.
Рисунок 3.11 Зависимость минимально возможной ширины прорезаемой
траншеи от диаметра фрезы
87
Для решения поставленной задачи был использован градиентный
метод оптимизации Девидсона-Флетчера-Пауэла [33,96]. Согласно этому
методу выбор начальной точки производится с учѐтом экспериментальных
данных об оптимальных конструктивных параметров фрезы. При этом мы
избежим неверных значений оптимизированных параметров, так как целевая
функция не является унимодальной. В случае спорных значений
оптимизируемых параметров можно выбрать несколько начальных точек и
провести исследование каждой из них.
Вслед за этим вычисляются составляющие вектора градиента, которые
дают направление поиска:
k
H i, j (
i( k )
j 1
F ( k )
)
xi
2
N N
F
H i , j
x j
i 1 j 1
1
i 1,2,...N ,
,
(3.5)
2
где k– номер итерации, а Hi,j– элементы симметричной положительно
определѐнной матрицы размерности NxN.
Принимая в качестве начальной матрицы единичную матрицу, будем
вести поиск вдоль линии наискорейшего спуска, в соответствии
с соотношением:
xi,нов xi,ст S i ,
i 1,2,...N ,
(3.6)
где S – шаг поиска.
Найдя одномерный оптимум, проверяем результат на сходимость и
если она достигнута, поиск прекращаем. В противном случае выбираем для
дальнейшего поиска новое направление, используя при этом прежнее
соотношение и новую матрицу Н:
H (k 1) H (k ) A(k ) B (k ) .
(k)
Элементы матриц A
по формулам:
(3.7)
и B , имеющих размерность NxN, вычисляются
(k)
t
A(k )
x ( k ) x ( k )
(x ( k ) ) t G ( k )
t
B (k )
,
t
H ( k ) G ( k ) G ( k ) H ( k )
G
(3.8)
(k )
G
(k ) t
H
(k )
,
(3.9)
индексом t обозначены транскопированные матрицы, x ( k ) и G ( k ) векторы столбцы разностей значений хi и градиентов в двух точках:
88
x ( k ) x ( k 1) x ( k ) ,
F ( k 1) F ( k )
(k )
G
.
x
x
(3.10)
(3.11)
После определения нового направления поиска, производится
одномерный поиск и продолжается итерационный процесс, подробное
описание которого дано в [33]. В качестве целевой функции для оптимизации
конструктивных параметров фрез нами было выбрано следующее уравнение:
Nфрmin
(3.12)
В качестве проектных параметров выступают: диаметр фрезы,
минимальная скорость резания, максимальное усилие подачи, развиваемое
базовой машиной, ширина прорезаемой щели.
В результате проведѐнного анализа были получены зависимости
рационального диаметра дисковой фрезы в зависимости от толщины
ледяного покрова, приведѐнные на рисунке 3.12.
Рисунок 3.12 Зависимость диаметра фрезы, обеспечивающего минимальную
мощность фрезерования, от толщины разрабатываемого слоя грунта
3.5. Выбор рационального количества резцов на фрезе
На рисунках 3.13–3.20 показано изменение энергетических
характеристик резания при изменении количества резцов на фрезе с 9 до 18 и
36 при применении различных технологических схем (рисунок 2.12 главы 2)
разработки мерзлого грунта.
89
Рисунок 3.13 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 9 резцов, расположенных в соответствии с
1ой схемой резания
Рисунок 3.14 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 18 резцов, расположенных в соответствии с
1ой схемой резания
90
Рисунок 3.15 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 36 резцов, расположенных в соответствии с
1ой схемой резания
Рисунок 3.16 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 9 резцов, расположенных в соответствии с
2ой схемой резания
91
Рисунок 3.17 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 18 резцов, расположенных в соответствии с
2ой схемой резания
Рисунок 3.18 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 36 резцов, расположенных в соответствии с
2ой схемой резания
92
Рисунок 3.19 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 9 резцов, расположенных в соответствии с
3ей схемой резания
Рисунок 3.20 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 18 резцов, расположенных в соответствии с
3ей схемой резания
93
Рисунок 3.21 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 36 резцов, расположенных в соответствии с
3ей схемой резания
Из рисунков видно, что при уменьшении общего количества резцов,
независимо от схемы резания, несмотря на увеличение силы резания на
одном резце, происходит снижение общего сопротивления резанию мерзлого
грунта дисковой фрезой. Снижение энергоѐмкости фрезерования мерзлого
грунта будет происходить до тех пор, пока в забое будет постоянно
находиться хотя бы один резец. В случае работы машины в условиях, когда в
забое резцы будут находиться непостоянно, будет происходить резкое
увеличение энергоѐмкости фрезерования, энергетические характеристики
которого проиллюстрированы рисунком 3.22.
Рисунок 3.22 Изменение крутящего момента на фрезе, в зависимости от еѐ
угла поворота, при наличии у неѐ 2 резцов, расположенных в соответствии с
1ой схемой резания
94
Из рисунка видно, что максимальная величина крутящего момента на
фрезе при этих условиях возрастает более чем в 10 раз.
Таким образом, для обеспечения минимальных затрат на фрезерование
грунта, количество резцов на фрезе должно быть минимальным, но
обеспечивающим постоянное нахождение одного резца в забое, независимо
от толщины разрабатываемого слоя грунта.
Так как рациональное количество резцов в забое будет равняться 1, то
процесс разрушения мерзлого грунта будет полностью адекватен
соответствующей математической модели, приведѐнной в главе 2.
Следовательно, наименьшими энергозатратами будет обладать схема
установки резцов № 3 в полном соответствии с выводами, приведѐнными во
второй главе данной работы.
Выводы по главе 3
1. Уточнена математическая модель взаимодействия дискофрезерного
рабочего органа с мѐрзлым грунтом, в области изменения нагрузок за
счѐт различных способов установки фрезы. Показано, что величина
крутящего момента довольно слабо зависит от места расположения
рабочего органа. Только в случае максимального поднятия рабочего
органа его среднеинтегральная величина увеличивалась на 10%. Таким
образом, анизотропные свойства грунта в данном случае сказывались на
суммарной оценке взаимодействия незначительно.
2. Описаны и проанализированы основные факторы, влияющие на величину
нагрузок на рабочем органе. Выявлены степень влияния каждого из них
на энергоѐмкость процесса фрезерования грунта. Кроме того, получены
наиболее вероятные диапазоны их изменения. Показано, что наибольшее
значение на процесс фрезерования оказывают влияние такие параметры
как толщина забоя и его температура. При этом изменение сил резания
носит прямопропорциональный характер.
3. В результате проведѐнных расчѐтно-теоретических
исследований
определены рациональные, с точки зрения минимизации энергозатрат на
фрезерование, таких параметров дисковой фрезы как еѐ диаметр,
количество и порядок установки резцов, скорости резания и подачи, а
также способ установки рабочего органа, относительно разрабатываемой
поверхности.
4. Показано,
что
применение
всего
комплекса
предложенных
усовершенствований позволит снизить мощность, затрачиваемую на
фрезерование на 15-20% при сохранении заданной производительности.
95
ГЛАВА 4.
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ВЗАИМОСВЯЗИ
ПАРАМЕТРОВ И РЕЖИМОВ РЕЗАНИЯ МЕРЗЛОГО ГРУНТА
РАБОЧИМ ОРГАНОМ ПОДКОПОЧНОЙ МАШИНЫ
4.1. Цель экспериментального исследования
В соответствии с задачами исследований, сформулированными на
основе обзора научных исследований, приведенных в первой главе,
экспериментальные работы были разбиты на 3 этапа:
Экспериментальная проверка механических характеристик мерзлого
грунта.
Экспериментальная проверка и уточнение математической модели,
параметров взаимодействия группы резцов рабочего органа в забое.
Экспериментальная проверка математической модели формирования
нагрузок на рабочем органе подкопочной машины.
В задачи первого этапа входило определение эталонных сил резания
для мерзлого грунта.
В задачи второго этапа входило определение численных значений
коэффициентов базовой математической модели резания мерзлого грунта,
группой резцов рабочего органа при разной компановочной схеме установки
и разных скоростях подачи и вращения рабочего органа.
Эксперименты третьего этапа решали следующие задачи: определение
механических характеристик силовой передачи, экспериментальная
проверка и уточнение математической модели формирования нагрузок на
рабочем органе подкопочной машины.
Экспериментальные
исследования
мерзлого
грунта
как
разрабатываемой среды заключалось в определении прочности при помощи
специального стенда, разработанного автором, а также на приводе рабочего
органа целиком.
С целью оптимизации количества экспериментальных исследований
была разработана схема проведения экспериментальных работ
(рисунок 4.1), основной идеей которого является получение максимально
точного массива исходных данных для проектирования специальной
подкопочной машины. К таким задачам относятся определение таких
параметров и величин их отклонений в реальных условиях эксплуатации как
сопротивляемость разрабатываемой среды резанию и сдвигу. Затем при
помощи методики проведения экспериментов, провести исследования
влияния изменения метеорологических и механических параметров на
условия разработки мерзлого грунта, но уже с минимальным количеством
опытов. Такой способ, по нашему мнению, даст максимальную
эффективность при проведении экспериментальных исследований.
96
Рисунок 4.1 Схема экспериментальных исследований
4.2.
Объект экспериментального исследования
Основной объѐм испытаний проводился на подкопочной машине
ПТ-НН П1020, общий вид которой показан на рис. 4.2.
Машина подкопочная автоматизированная предназначена для
разработки и удаления грунта из-под ремонтируемых трубопроводов,
предварительно вскрытых сверху и с боков ниже нижней образующей трубы
на глубину не менее одного метра. Принцип работы машин серии МПА
описан в приложении 1.
Машина изготавливается в климатическом исполнении У, категории
pазмещения I по ГОСТ 15150-89 для эксплуатации при температуре
окружающего воздуха от минус 25 С до плюс 40С.
На рисунке 4.3 представлен привод рабочего органа подкопочной
машины.
На рисунках 4.4, 4.5, 4.6 представлен рабочий орган подкопочной
машины в полевых условиях во время проведения испытаний.
97
Рисунок 4.2. Машина подкопочная автоматизированная ПТ – НН П1020
Рисунок 4.3 Привод одной из фрез рабочего органа:
1– редуктор; 2– ротор (фреза); 3– кронштейн; 4– электродвигатель привода
ротора.
98
Рисунок 4.4 Подкопочная машина ПТ-НН П1020
(фрезы выведены из забоя)
Рисунок 4.5 Подкопочная машина ПТ-НН П1020 - рабочее положение
Рисунок 4.6 Машина для подкопа трубопроводов типа МПТ
99
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ:
Диаметр подкапываемого трубопровода, мм
1020, 1220
Глубина подкопа, мм
550
Категория разрабатываемых грунтов
I-V
Пpоизводительность, пм /час, не менее:
в грунтах I категории
70
в грунтах IV категории
40
в грунтах V категории
не регламентируется
Диаметр роторов рабочих органов, мм
1585
Количество роторов, шт
2
Частота вращения роторов, об/ мин
100
Электpодвигатель привода ротора
количество, шт
2
тип
АИРХ 160М4 У2 1М 1081
ТУ 16-526.621-85
мощность, кВт
18,5
скорость вpащения, об/мин
1500
напpяжение питания
380 В; 50 Гц
Электpодвигатель привода насоса гидросистемы
тип
АИРХ 132 М4 У2 1М 1081
ТУ 16-526.621-85
мощность, кВт
11
скорость вpащения, об/мин
1500
напpяжение питания
380 В; 50 Гц
Привод передвижения машины и фиксация на трубопроводе
гидроцилиндрами
Рабочее давление в гидросистеме, Мпа (кг/см2 )
100,5 (1005)
Тип насоса
3102.56-04У1 ТУ 22-1.020-84-92
производительность, л / мин
53
скорость вpащения, об/мин
1000
Габаритные размеры, мм
длина
3475
ширина (без штанги с пультом управления)
3200
высота (без штанги с пультом управления)
2700
Масса, кг
4700
Заправочные ѐмкости
масляного бака гидросистемы, л
75
двух редукторов, л
12
Общая установочная мощность, кВт
48
Ротор представляет собой фрезу, изображенную на рисунке 4.7. Состоит
из корпуса 2, установленных на корпусе резцов 1 и лопаток 3. Лопатки 3
предназначены для отброса размельченного грунта в прямки.
100
Рисунок 4.7 Ротор
b
γ
Рисунок 4.8 Резец
Резец представляет собой (рисунок 4.8): кронштейн 1, и
твердосплавную пластину 2 (HRCэ 60…80).
С целью исследования влияния конструктивных параметров резца на
процесс фрезерования было изготовлено несколько комплектов резцов с
различными параметрами (рисунок 4.9).
101
ст
Рисунок 4.9 Параметры резца:
δ– задний угол; γ– угол заострения наконечника; αст– статический угол
резания.
На рисунке 4.10 представлен общий вид исследуемого резца во время
испытания.
Рисунок 4.10 Общий вид исследуемого резца
На рисунке 4.11 приведена конфигурация этих резцов и установка их на
роторе с указанием на выносных элементах величины угла резания δ:
а)- при постоянном значении угла заострения наконечника γ=30°
(таблица 4.1);
в)- при постоянном значении угла заострения наконечника γ=50°
(таблица 4.2);
102
Рисунок 4.11 Типы резцов с различными углами резания
а) - при угле заострения наконечника γ = 30°;
в) - при угле заострения наконечника γ = 50°.
Ширина резца b (рисунок 4.8) менялась в интервале от 10мм до 100мм
с шагом в 10мм.
Таблица 4.1
Выносной элемент
а1
а2
а3
а4
а5
а6
Угол резания, αСТ
35°
40°
45°
50°
55°
60°
Таблица 4.2
Выносной элемент
в1
в2
в3
в4
в5
в6
Угол резания, αСТ
60°
65°
70°
75°
80°
85°
103
4.3.
Методика проведения испытаний
Настоящая методика устанавливает программу и порядок проведения
испытаний по определению параметров взаимодействия рабочего органа
подкопочной машины с мерзлым грунтом.
4.3.1. Программа испытаний
Общий метод исследований состоял в определении величины силы
резания возникающей на рабочем органе подкопочной машины при
различных режимах резания грунта и разных конструктивных параметрах
рабочего органа. При взаимодействии рабочего органа с грунтом
фиксировалась нагрузка как на единичном резце (при использовании
специального стенда, рисунок 4.12), так и на приводе рабочего органа
целиком. Сравнительная оценка действительных и расчетных значений сил
резания, действующих на резцы рабочего органа подкопочной машины,
производилась на основе обработки сигналов, получаемых от приборов и
датчиков, установленных на машине и специально разработанном стенде
(рисунок 4.12, 4.14).
Рисунок 4.12 Стенд для проверки силы резания различными типами резцов
104
Программа испытаний предусматривает выполнение следующих
видов работ:
Подготовка рабочих органов подкопочной машины и специального
стенда;
Подготовка приборов и аппаратуры к испытаниям;
Проведение комплекса подготовительных работ на месте испытаний;
Проведение регистрации исследуемых процессов.
Требования к состоянию подкопочной машины и специального стенда:
Техническое состояние элементов рабочих органов перед регистрацией
исследуемых процессов должно соответствовать требованиям технического
задания на испытания.
Требования к состоянию аппаратуры и датчиков:
Аппаратура и датчики, используемые на испытаниях должны находиться
в состоянии, при котором предприятие изготовитель гарантирует их
нормальное функционирование.
Характеристики датчиков и аппаратуры должны обеспечивать
регистрацию исследуемых процессов без искажения.
Перед проведением регистрации исследуемых величин должны быть
получены тарировочные графики применяемых датчиков. При
необходимости должна быть снята частотная характеристика
измерительно-регистрирующего канала.
После окончания регистрации исследуемых величин должны быть
проверены тарировочные графики применяемых датчиков.
Комплекс подготовительных мер на месте проведения испытаний:
На месте проведения испытаний перед регистрацией исследуемых
процессов необходимо провести следующие виды работ:
Подготовить рабочие органы подкопочной машины и специального
стенда;
Установить приборы и датчики и настроить их;
Подключить питание к измерительной и регистрирующей аппаратуре
согласно полярности;
Произвести проверку соответствия движения датчика на экране
персонального компьютера изменению регистрируемого процесса.
Регистрации исследуемых процессов:
Проводилась с использованием комплекса измерительной аппаратуры
RIGOL, приборов и датчиков.
4.3.2. Место проведения испытаний
Экспериментальные исследования проводились начиная с ноября
2010 года по февраль 2015 в с. Б. Болдино Нижегородской области.
Среднемесячная дневная температура воздуха составила: за ноябрь
– 18,2 С; за декабрь – 27,1 С; за январь – 27,3 С; за февраль – 25,8 С.
105
Любая из серий испытаний проводилась в течение одного дня с тем,
чтобы физико-механические свойства мерзлого грунта, зависящие от его
температуры, не успевали значительно измениться.
В
месте
проведения
эксперимента
получены
следующие
характеристики грунта: суглинок, влажность 70%, глубина промерзания 5м,
температура грунта под трубопроводом на момент вскрытия - 5°С, плотность
1,86 т/м3.
4.3.3. Порядок проведения экспериментов
Важнейшим фактором, определяющим уровень нагрузок на рабочих
органах подкопочной машины, является прочность разрабатываемой среды.
В большинстве известных математических моделях, описывающих усилие
резания
единичным
резцом,
прочность разрабатываемой
среды
характеризуется коэффициентом удельного сопротивления резанию,
представляющего собой силу резания при определенных эталонных
условиях.
Автором настоящей работы в период с ноября 2010 года по февраль
2015 года был накоплен необходимый экспериментальный материал по
определение численных значений данного коэффициента, связанный с
применением специально разработанного стенда.
Эксперименты с помощью специально разработанного стенда
(рисунок 4.12) проводились на полигоне, который представлял собой ряд
траншей различной ширины, что необходимо для получения различных
значений глубины резания в период проведения опытов. Глубина траншеи
строго не регламентировалась.
Часть полученных экспериментальных данных (для суглинка 70%
влажности) приведена в таблице 4.3. На основе всего экспериментального
исследования был сделан ряд выводов, позволивших упростить задачу
представления численных значений эталонных сил резания в виде данных
таблицы. Было установлено, что в период проведения эксперимента
изменение величины эталонной силы резания не превышала 10% от
среднего значения данной силы по всем экспериментам. Следовательно,
прочностные качества мерзлого грунта можно охарактеризовать одним
значением.
Таблица 4.3
Значения эталонных сил резания (в Ньютонах) мерзлого грунта, полученных
для условий: ширина резания равна 0,01метра, глубина резания равна
0,01метр, температура 0°С, скорость резания 0м/с, угол резания 40 град.
период проведения испытаний
Место проведения
2013
2013
2013
2014
эксперимента
ноябрь
декабрь
январь
февраль
Нижегородская обл., р-н с.
54
57
55
55
Б. Болдино
106
Определение геометрических параметров забоя приведено на рисунке
4.13.
Рисунок 4.13 Определение геометрических параметров забоя
Эксперименты с помощью рабочего органа подкопочной машины
(рисунок 4.4, 4.5, 4.6) проводились на трассе прохождения трубопровода в
Большеболдинском районе Нижегородской области.
Приборы и датчики устанавливаемые на рабочем органе подкопочной
машины и специально разработанном стенде:
Для замера угловой скорости рабочего органа применялся прибор ЦД9903
с электромагнитным тахометрическим датчиком (устанавливается на валу
привода фрезы).
Для замера углового перемещения рабочего органа применялся прибор
ЦД9903
с оптоэлектронными датчиками (устанавливается на валу
привода фрезы).
Динамометр или датчик, регистрирующий величину силы приложенной к
рабочему органу необходимо установить между механизмом
вызывающим эту силу и исследуемым элементом рабочего органа. В
качестве динамометра можно применять динамометры сжатия типа
ДОС-1, либо универсальные динамометры типа ДОУ-1 (устанавливаются
в механизм продольного перемещения машины, для определения силы
тяги).
107
Расходомер (устанавливается на цилиндр продольного перемещения
машины) – предназначен для контроля величины производительности
гидронасоса.
При замере силы тока на электродвигателе привода рабочего органа
применялась измерительная аппаратура RIGOL.
При замере температуры исследуемого объекта применялся портативный
инфракрасный пирометр – ThermoPoint 3 Pro.
Места установки датчиков на подкопочной машине приведены на
рисунке 4.14.
Рисунок 4.14 Места установки датчиков
4.4. Методика планирования и обработка результатов экспериментов
Взаимодействие рабочих органов подкопочных машин зависит от
многих факторов, влияющих на величину и характер изменения усилий,
действующих на рабочие органы. Анализ априорной информации и
проведѐнные постановочные эксперименты выявили пять основных факторов
формирующих усилие резания на единичном резце в условиях
блокированного резания. Такое количество факторов заставляет отказаться
от классической схемы эксперимента для определения численных значений
базовой математической модели взаимодействия единичного резца с
мерзлым грунтом. Поэтому для решения данной задачи пришлось применить
методы и приѐмы теории планирования эксперимента.
Из различных статистических моделей, получаемых методами
планирования
эксперимента,
наибольший
практический
интерес
представляют регрессивные модели, выражаемые соотношением:
Y ( x) e f ( x) e f T ( x) e ,
0
где х=х1,х2,….х - вектор входных переменных (факторов);
=1,2,… - вектор неизвестных коэффициентов регрессии;
(4.1)
108
fT(x)=f0(x),f1(x),….f(x) - вектор базисных функций;
е – аддитивная помеха случайного характера.
Применение
аппарата
классического
регрессивного
анализа
предполагает выполнение следующих предпосылок:
1. Аддитивная помеха есть случайная величина с математическим
ожиданием mе=0 и постоянной дисперсией 2е, то есть интенсивность
шума не меняется при изменении различных исследуемых факторов.
Вопрос о соблюдении данного условия решается в результате анализа
всех свойств изучаемого объекта.
2. Значение помехи е в различных наблюдениях некореллированы, то есть:
11{е,еj}=0, ij. Для обеспечения данного требования используется
методика проведения эксперимента, при которой порядок реализация
опытов выбирается случайным образом.
3. Ошибка измерения факторов Х равна 0, то есть вклад, вносимый
случайными ошибками измерения факторов Х в дисперсию
воспроизводимости, должен быть пренебрежительно мал по сравнению
с другими неконтроллируемыми факторами, образующих аддитивные
помехи величиной е. Это предположение сначала просто постулируется,
так как проверить его возможно только после получения регрессивной
модели.
4. Векторы– столбцы базисных функций должны быть линейно
независимы, то есть
N
[af
q 0
j
( xq ) bf k ( xq )] 0
для любых ненулевых
констант а и b. Выполнение данного требования необходимого для
получения раздельных оценок всех коэффициентов регрессии ,
обеспечивается соответствующим выбором плана эксперимента.
5. Помеха е подчиняется нормальному закону распределения, с
параметрами, указанными в пункте 1 настоящих требований (me=0,
2e=const). Данное требование необходимо для корректного выполнения
всех статистических процедур в регрессивном анализе.
Полученные в результате решения регрессивной задачи, оценки
коэффициентов регрессии и предсказанные значения отклика тем
предпочтительней, чем меньшую величину принимают интегральные
характеристики точности. При выполнении основных предпосылок
регрессивного анализа эти характеристики зависят от вектора базисных
функций, значений факторов во всех опытах, а также метода обработки
данных. Если метод обработки задан и выбрана система базисных функций,
то сохраняется лишь зависимость от наблюдаемых во всех опытах значений
факторов. Поэтому основным предметом исследования теории планирования
эксперимента является активный эксперимент, при котором все входные
переменные являются управляемыми, и исследователь может предусмотреть
при какой комбинации факторов следует проводить каждый отдельный опыт.
Поэтому натурные эксперименты по проверки и уточнению
математической модели формирования нагрузок на рабочем органе
109
подкопочной машины, проводившиеся в рамках второго этапа исследований
проводились по классической схеме, так как часть входных параметров
данной модели являются неуправляемыми (температура грунта), а
управление другими такими как скорость вращения фрезы и движения
машины, обусловлена особенностями применения всего комплекса машин.
С целью упрощения экспериментального исследования с одной
стороны и обеспечения заданной точности получаемых результатов, было
предложено
видоизменить систему базисных функций и иметь
регрессионную модель в виде, отличным от выражения 4.1.
n
n1
n
n
Y / 0 i xi ij xi x j ii ( xi xi2 ) ,
i 1
i 1 j i 1
2
(4.2)
i 1
где Х i2 - математическое ожидание квадратичного числа, определяемое из
выражения:
(4.3)
Х i2 (2n p 2 2 ) / N ,
/
а 0– модифицированный свободный член математической модели, равный
0 ii xi2 .
Общий план проведения экспериментальных исследований приведѐн в
таблице 4.4.
Переход к центрированным переменным при квадратичных
коэффициентах обеспечивает ортогональность столбца матрицы F численных
значений базисных функций, соответствующего свободного члена уравнения
регрессии (базисная функция f1), и любого из столбцов централизованных
2
квадратов (базисная функция х2i=(x2i- xi )). Однако, при произвольном
значении звѐздного плеча , остаются неортогональными столбцы матрицы
F, отвечающие различным центрированным квадратичным переменным.
Поэтому числовые значения
необходимо выбрать из условия
оротоганальности этих столбцов по формуле [50]:
2 n p 2 (2 n p 2n 1) 2 n p 1 .
(4.4)
Таблица 4.4- Композиционный план Хартли при n=5 (область планирования
естественная)
g
х1
х2
х3
х4
х5
1
-1
-1
-1
-1
+1
2
+1
-1
-1
-1
-1
3
-1
+1
-1
-1
-1
4
+1
+1
-1
-1
+1
5
-1
-1
+1
-1
-1
6
+1
-1
+1
-1
+1
7
-1
+1
+1
-1
+1
8
+1
+1
+1
-1
-1
9
-1
-1
-1
+1
-1
10
+1
-1
-1
+1
+1
110
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
-1
+1
-1
+1
-1
+1
-
+
0
0
0
0
0
0
0
0
0
+1
+1
-1
-1
+1
+1
0
0
-
+
0
0
0
0
0
0
0
-1
-1
+1
+1
+1
+1
0
0
0
0
-
+
0
0
0
0
0
+1
+1
+1
+1
+1
+1
0
0
0
0
0
0
-
+
0
0
0
+1
-1
+1
-1
-1
+1
0
0
0
0
0
0
0
0
-
+
0
Таким образом, для ортогональности плана Хартли при n=5, ядре плана
вида ДФЭ25-1 и N=27 звѐздное число необходимо принять равным 1.547,
тогда математическое ожидание квадратичного члена будет равным 0.77.
Значения уровней факторов в плане эксперимента записаны в
нормализованном виде [50]:
X ib X i 0
1
X i
X X i0
xi 0 i 0
0 ,
X i
X X i0
xin iH
1
X i
xib
(4.5)
где Xib, Xi0, XiH– значения i-ого фактора на верхнем, базовом и нижнем
уровнях, Xi – интервал варьирования фактора Xi, а xib, xi0, xiH– значения
i-ого фактора в нормализованном виде.
Для перехода к натуральным значениям величин необходимо
воспользоваться выражением:
.
Х i xi X i X i 0 .
(4.6)
При
выборе диапазона изменения факторов учитываются
конструктивные особенности подкопочных машин и условий их
эксплуатации. Результаты операции нормализации факторов приведены в
таблице 4.5
111
Таблица 4.5
Наименование
Факторов
Обозначе
Уровни варьирования
Интервал
ние
-1.547 -1
0
1 1.547 варьирования
факторов
Ширина резания, мм
х1
21
35 60 85
99
25
Глубина резания, мм
х2
5
10 20 30
35
10
Угол резания, град
х3
25
30 40 50
55
10
Модуль температуры
х4
5
10 20 30
35
10
0
грунта, С
Скорость резания, м/с
х5
1,45
2
3
4
4,55
1
Для оценки дисперсии воспроизводимости 2е было применено
равномерности опытов с числом повторяемости измерений равным 2. В связи
с этим, в формулах, оценивающих коэффициенты регрессии, в качестве
экспериментального значения функции отклика фигурирует еѐ среднее
значение. Для практической реализации план эксперимента был разбит на
серии опытов, в которых остаѐтся постоянным фактор х 4– модуль
температуры мерзлого грунта. При этом, с целью выполнения второй
предпосылки регрессионного анализа о некоррелированности значений
помехи е в различных наблюдениях, внутри каждой серии организовывалось
рандомизация с использованием таблицы равномерно распределѐнных
случайных чисел [50].
Полученные данные обрабатывались в соответствии с общей схемой
регрессионного анализа, включающей в себя следующие основные этапы:
1. Проверка воспроизводимости эксперимента. Фактически, это
проверка первой предпосылки регрессионного анализа о постоянстве
дисперсии шума. Производится она с помощью критерия Кохрена
поскольку число параллельных опытов во всех точках плана одинаково
и равно 2. Статистика данного критерия имеет вид:
S KO
2
S max
S
q 1
где Sq2
,
N
(4.7)
2
q
m
1
2
( yql yq ) 2 - оценка дисперсии воспроизводимости, S max–
m 1 l 1
наибольшая из оценок дисперсии воспроизводимости. Уровень
значимости при этом принимаем равным q=0.05, число степеней
свободы числителя =m-1=1 и знаменателя =N=27. В том случае,
когда SKO меньше табличного значения коэффициента Кохрена,
рассчитанного для соответствующих степеней свободы, считается, что
е2 =const.
2. Оценка дисперсии шума определяется путѐм усреднения Sq2 по
выражению:
112
N
S
q 1
S e2
2
q
.
N
(4.8)
3. Вычислением оценок коэффициентов регрессии производится
методом наименьших квадратов. Для модифицированной модели (4.2)
формулы оценки коэффициентов регрессии будут иметь следующий
вид:
N
/
0
N
Yq
q 1
i
;
N
N
ij
q 1
2 n p
x
q 1
iq q
20.786
,
~x Y
q 1
iq
2 4
i, j 1,2...n; ij
,
16
N
2
q
( ~xiq2 ) 2
xY
N
2
ii
2 2
x Y
iq ij q
q 1
N
~x Y
q 1
N
2
q 1
n p
N
xiq xijYq
iq
N
xiqYq
~x Y
2
q
q 1
q
iq
11.45
,
i 1,2...n
(4.9)
q 1
N
0 0/ ii ( xi2 ) 0/
i 1
2n p 2 2
N
N
N
i 1
i 1
ii 0/ 0.77 ii
3.1Оценка дисперсий оценок коэффициентов регрессии.
Для стационарных центрально-композиционных планов и
модели, представленной выражением 4.2, формулы оценивания имеют
вид:
Se2
S2
e;
0
mN 54
2
Se
Se2
,
m(2n p 2 2 ) 41.572
S 2 /
S 2
i
S 2
ij
S 2
ii
S 20
i 1,2...n;
Se2
Se2
,
i, j 1,2...n; ij
m2n p 32
Se2
S e2
,
i 1,2...n;
m2 4 22,9
(4.10)
Se2 n(2n p 2 2 ) 2
2
1
0.148Se ,
mN
2 4 N
При этом все оценки коэффициентов некоррелированы.
Проверка значимости коэффициентов регрессии проводится при
помощи критерия Стьюдента путѐм вычисления статистики t j i S и
сравнения вычисленного значения с табличным критическим значением
t27,0025, где 27- число степеней свободы нашего эксперимента, а 0,0025уровень значимости критерия делѐнный пополам. Если tjt27,0.0025 то
соответствующий коэффициент регрессии считается незначительным и в
дальнейших расчѐтах участия не принимает.
i
113
Так
как
план
эксперимента
удовлетворяет
критерию
ортогональности, то полученные оценки коэффициентов регрессии
некоррелированы. В связи с этим отпадает необходимость пересчѐта
коэффициентов, если один из них отбрасывается в результате проверки
его значимости.
4. Расчѐт предсказанных по уравнению регрессии значений
отклика в точках спектра плана и анализ точности
предсказания будем производить по уравнению регрессии,
содержащему
лишь
переменные
со
значимыми
коэффициентами:
d*
Yˆ j f j ( x) ,
(4.11)
j 1
где j– индексы, соответствующие значимым коэффициентам регрессии, а
d*- общее число таких коэффициентов в регрессивной модели. Для
оценки точности предсказания воспользуемся вычислением выборочной
дисперсии S2, интегрально оценивающей степень рассеяния Yˆq
относительно Yq :
N
S
2
(Yˆ
q 1
q
Yq ) 2
N d*
*
N
d
1
2
(
Y
N
j2 ).
q
*
N d q1
j
(4.12)
5. Проверка адекватности уравнения регрессии осуществлялась
путѐм сопоставления выборочной дисперсии S2 и оценки
дисперсии шума Se2 с помощью критерия Фишера. При этом
используется следующая статистика:
F
mS 2
,
S e2
(4.13)
численные значения которых сравниваются с табличными значения
коэффициента Фишера F1,27,0.0025, где m – разница между общим
количеством коэффициентов регрессии и их значимыми величинами.
В случае, когда расчетное значение статистики меньше табличного
критерия модель считается адекватной и наоборот.
6. Проверка работоспособности регрессионной модели.
Модель может считаться работоспособной (пригодной к
практическому использованию для целей предсказания), если у этой
модели коэффициент детерминации R20.75, что обеспечивает
уменьшение ошибки предсказания, по крайней мере в два раза, когда для
предсказания используется регрессионная модель вместо примитивного
N
предсказания по среднему значения отклика Y
Y
q 1
q
N
без учѐта
влияния факторов на отклик. Из учѐта всего вышесказанного модель
может считаться работоспособной при выполнении следующего
условия:
114
R2 1
m( N d * ) S 2 N (m 1) Se2
N
m (Yq Y ) N (m 1) S
2
q 1
0.75 .
(4.14)
2
e
4.5. Результаты реализации расчѐта по планированию проведения
ортогонального композиционного плана Хартли.
Как было сказано выше, для определения зависимости усилия резания
грунта единичным резцом, в зависимости от основных пяти факторов
(ширина резания, угол резания, глубина резания, скорость резания и модуль
температуры грунта) согласно плана Хартли было проведено 27 опытов. С
целью уменьшения вероятности промахов замеры в каждом опыте
проводились трижды. Результат получался как среднеарифметическое
значение результатов трѐх экспериментов. При этом контролировалась
разница результатов, полученных в результате одного цикла испытаний,
которая не должна была превышать 10%. Полученные в результате 27 циклов
опытов, максимальные, минимальные и средние значения режущей силы, а
также значения оценок дисперсии воспроизводимости опыта приведены в
таблице 4.6.
Таблица 4.6- Результаты реализации матрицы планирования ортогонального
композиционного плана Хартли
№
Yg1,H
Yg2,H
Y g ,H
S g2 ,H2
опыта
1
603
557
580
1058
2
1217
1135
1176
3362
3
866
800
833
2178
4
2228
2372
2300
10368
5
517
477
497
800
6
1428
1318
1373
6050
7
933
1011
972
3042
8
1894
2050
1972
12168
9
904
836
870
2312
10
2306
2498
2402
18432
11
1632
1768
1700
9248
12
3588
3312
3450
38088
13
975
1055
1015
3200
14
1977
2141
2059
13448
15
1515
1399
1457
6728
16
3886
4166
4026
39200
17
498
460
479
722
18
2051
2221
2136
14450
19
709
655
682
1458
115
20
21
22
23
24
25
26
27
1633
2160
2170
803
1916
1105
1524
1255
1769
2340
2328
743
1770
1199
1404
1361
1701
2250
2249
773
1843
1152
1464
1308
42719
9248
16200
12482
1800
10658
4418
7200
5618
25393
Тогда,
согласно
выражения
4.7
произведѐм
проверку
воспроизводимости результатов эксперимента. Полученный результат,
равный 0,1544 меньше табличного значения для данных условий проведения
опыта, равного 0,3182. Таким образом, можно сделать вывод о том, что
результаты эксперимента являются полностью воспроизводимыми.
Дисперсия шума, находимая из выражения 4.8 будет равна 9405Н2. Значения
коэффициентов регрессии, полученных при помощи системы уравнений 4.9,
оценок дисперсии оценок коэффициентов регрессии, полученных при
помощи системы уравнений 4.10, а также значения коэффициентов
Стьюдента и оценка значимости каждого коэффициента уравнения регрессии
приведены в таблице 4.7.
Таблица 4.7- Значения коэффициентов уравнения регрессии
Коэффициент регрессии
Оценка
Коэффициент
Оценка
дисперсии
Стьюдента
значимости
обозначение
значение
1582
174
120
Значимый
’0
645
226
42,9
Значимый
1
400
226
26,61
Значимый
2
2,81
226
0,19
Незначимый
3
430
226
28,60
Значимый
4
122
226
8,12
Значимый
5
171
294
9,97
Значимый
12
9
294
0,52
Незначимый
13
185
294
10,79
Значимый
14
52
294
3,03
Значимый
15
14
294
0,82
Незначимый
23
115
294
6,71
Значимый
24
36
294
2,10
Значимый
25
13
294
0,76
Незначимый
34
47
294
2,74
Значимый
35
38
294
2,22
Значимый
45
3,3
411
0,16
Незначимый
11
-45
411
-2,22
Значимый
22
116
33
44
55
0
397
3,55
3,55
1303
411
411
411
1392
19,58
0,175
0,175
34,92
Значимый
Незначимый
Незначимый
Значимый
Оценка значимости давалась путѐм сравнения полученного значения
коэффициента Стьюдента со стандартным значением данного коэффициента,
разработанного для комплекса исследований из 27 опытов, равного 2,05 [50].
Таким образом, число значимых коэффициентов разработанной модели будет
равняться 14.
Таким образом, искомая регрессионная модель примет вид:
Y=1303+645x1+400x2+430x4+122x5+171x1x2+185x1x4+52x1x5+115x2x4+36x2x5+
+47x3x5+38x4x5-45x22+397x32,
(4.15)
где значения х приведены в таблице 4.5.
Величина выборочной дисперсии, определяемой из выражения 4.12,
составит 8218, коэффициент Фишера, полученный при помощи уравнения
4.13 и коэффициент детерминации, полученный из уравнения 4.14,
получились равными соответственно 1.75 и 0,981. Модель считается
адекватной в том случае, когда коэффициент Фишера будет меньше
критического табличного значения для конкретных условий проведения
эксперимента, в нашем случае равной 2,13. Работоспособность модели,
наоборот, подтверждается в том случае, когда полученный результат будет
превышать значение равное 0,75. В данном случае выполняются оба условия,
что говорит о том, что полученное эмпирическое выражение 4.15
работоспособно и адекватно.
Таким образом, было получено уравнение, позволяющее рассчитывать
значения режущей силы единичного резца в условиях блокированного
резания при изменении 5 параметров. Данное выражение позволяет быстро и
довольно точно спрогнозировать любое изменение параметров резания
грунта в различных условиях эксплуатации. Однако, в связи с тем, что в
данном выражении реальные процессы, происходящие при взаимодействии
рабочего органа с грунтом, заменены на искусственные математические
выражения, с подобранными с различной точностью экспериментальными
коэффициентами,
осуществить
математическую
оптимизацию
взаимодействия резцов с разрабатываемым основанием невозможно. Кроме
того, все эмпирические выражения имеют строго определѐнные границы
применимости, внутри которых погрешность теоретических значений по
отношению к экспериментальным часто бывает различна, в зависимости от
степени адекватности предложенной модели. Поэтому для выбора
рациональных параметров рабочего органа требуется применение новых
усовершенствованных моделей, описывающих реальные физические
процессы. Определѐнный прорыв в данном направлении связан со
значительным развитием вычислительной техники, позволивший решать
задачи ещѐ 10 лет назад считавшиеся не выполнимыми. Однако,
117
относительная новизна данного подхода не позволила накопить достаточное
количество экспериментальных данных, позволяющих оценить адекватность
того или иного решения поставленной задачи, в связи с чем большинство
физически строгих моделей имеют проверенные решения только для очень
ограниченного количества условий. Поэтому, в дальнейшем, мы будем
использовать полученное эмпирическое выражение для проверки строгих
математических моделей, что позволит при заданной точности расчѐтов
значительно
снизить
количество
проводимых
экспериментальных
исследований.
4.6. Оценка адекватности строгой
математической модели
взаимодействия рабочего органа подкопочной машины с мерзлым
грунтом.
В результате
экспериментальных исследований взаимодействия
рабочего органа подкопочной машины с мерзлым грунтом с использованием
соответствующих
приборов
был
получен
статистический
ряд
многофакторных измерений. На основе полученных результатов было
получено эмпирическое выражение. Одновременно, на основе теоретических
предпосылок были предложены математические модели взаимодействия с
разрабатываемым мерзлым грунтом, как единичного резца, так и рабочего
органа в целом (глава 2). Так как выражение 4.15 является работоспособным
и адекватно описывает процессы взаимодействия одиночного резца с
разрабатываемым грунтом, то в дальнейшем было принято решение
производить проверку вновь полученных математических моделей,
сравнивая их показания с результатами расчѐта по выражению 4.15, которые
будем считать тождественными опытным данным.
Достоверность эксперимента проводилась по критерию Кохрена [50].
Критерий Кохрена предполагает оценку результатов экспериментов на
воспроизводимость. Суть такой проверки сводится к следующему. Имеется
несколько параллельных результатов расчѐта некоторого параметра. Для
каждой серии вычисляется среднеарифметическое значение X результатов
измерений:
n
X
i 1
Xi
,
n
(4.16)
где n- число измерений в одной серии, принимаемое обычно равным
3...4. Далее для каждой серии вычисляем дисперсию:
n
Dj
i 1
( X i X )2
.
(n 1)
(4.17)
Чтобы оценить воспроизводимость, рассчитывают критерий Кохрена:
K кэ
max D j
m
D
j 1
j
,
(4.18)
118
где
max
Dj-
наибольшее
параллельных серий;
m
D
j 1
j
значение
дисперсий
из
- сумма дисперсий m серий.
рассматриваемых
Рекомендуется
принимать2<m< 4. Опыт считается воспроизводимым при :
Ккэ < Ккт ,
(4.19)
где Ккт- табличное значение критерия Кохрена
[50], принимаемое в
зависимости от доверительной вероятности Рд , числа степеней свободы q :
q = n-1
(4.20)
и числа серий опытов. Рекомендуется принимать значение доверительной
вероятности Рд = 0,95.
После установления достоверности результатов экспериментальных
исследований на воспроизводимость необходимо перейти к оценке
адекватности математической модели. Оценка адекватности модели объекту
исследования
производится
во всех случаях на стадии анализа
экспериментально-теоретических исследований.
Суть такой проверки состоит в сопоставлении полученной или
предполагаемой теоретической функции с результатами измерений или
расчѐтов.
Пусть известен отклик реальной системы или, как в нашем случае
значения эмпирического уравнения Уэ при параметрах i и неизвестной изза сложности и малой изученности протекающих в объекте процессов
функции Уэi=(i). Модель представляет собой
аппроксимационную
зависимость Утi=f(i), i=1...N, где i и N, соответственно, номер и число
опытов на модели и реальной системе. Тогда установление адекватности- это
определение ошибки аппроксимации опытных или расчѐтных данных.
Проверку адекватности модели реальному объекту исследований или
проверенному эмпирическому выражению можно проводить различными
способами. Однако вследствие того, что экспериментальные исследования,
связанные с мерзлым грунтом весьма трудоемки, нестабильны и дороги, их
число всегда ограничено.
По этой причине целесообразно для оценки адекватности использовать
критерий Фишера, который как раз рассчитан на минимально возможное
число опытов.
Для оценки адекватности модели по критерию Фишера необходимо
рассчитать экспериментальное значение критерия- Кфэ и сравнить его с
теоретическим Кфт,
принимаемым при требуемой доверительной
вероятности Рд. Если выполняется условие:
Кфэ < Кфт,
(4.21)
то модель адекватна. При этом надо помнить, что оценка адекватности
модели должна проводиться для нескольких компонент модели. Если
отсутствует адекватность хотя бы по одной из компонент, то считается, что
модель в целом неадекватна.
Для
каждой
из
компонент
экспериментальный
критерий
рассчитывается по формуле:
119
Кфэ = Dcp / D,
(4.22)
где D=Dj- дисперсия отклика реальной системы, которая определяется по
формуле (4.17) или:
(YÝi YÝ ) 2
,
D
( N 1)
i 1
n
(4.23)
а Dср- средняя дисперсия всего эксперимента и рассчитывается по
зависимости:
N2
DCP
i 1
(YTi YЭ ) 2
.
( N 2 1)
(4.24)
В выражениях (4.23) и (4.24) Утi- теоретическое значение функций для
каждого измерения; Уэi- экспериментальные значения функций или
результаты расчѐта по проверенной эмпирической формуле; Уэ- среднее
арифметическое значение
экспериментальных функций; N1- число
экспериментальных опытов; N2 - число теоретических опытов. Отметим, что
поскольку Кф всегда должен быть больше 1 , то в числителе в формуле (4.23)
берѐтся большая из оценок дисперсий. Чаще всего выполняется неравенство:
DcpD .
(4.25)
Обычно доверительная вероятность принимается Рд=0.95 и при
конкретных значениях степеней свободы:
q=n-1
q=n(m-1)
n = N1= N2
(4.26)
(при данном способе проверки адекватности стремятся к N1=N2) по таблицам
для критерия Фишера [50] выбирается критическое значение Кфт.
Для проверки адекватности модели взаимодействия
режущего
элемента рабочего органа с мерзлым грунтом реальному объекту
целесообразно выбрать ключевые звенья, которые наиболее характерно
отражают как сам процесс, так и модель. Не менее важно, чтобы выбранные
компоненты модели для проверки имели надѐжное экспериментальное
подтверждение.
Таким параметром может быть единичная сила резания, так как этот
параметр является не только неизвестным в системе уравнений
формирования нагрузок на рабочем органе, но и ключевым звеном всей
модели прогноза энергозатрат на фрезерование мерзлого грунта
в
конкретных условиях эксплуатации. Основными же параметрами рабочего
органа будут являться диаметр, количество резцов, их ширина, угол резания,
скорость резания, глубина резания. Кроме того, величина нагрузки на
рабочем органе будет также определяться температурой мерзлого грунта и
толщиной разработки.
Таким образом, для оценки адекватности модели влияния основных
параметров рабочего органа на процесс разрабатывания мерзлого грунта,
выберем следующие параметры:
величину единичной силы резания,
определяемой при помощи специально разработанного стенда (рисунок 4.12),
120
диаметр рабочего органа, угол резания, скорость резания, количество
установленных резцов на рабочем органе, их ширину, а так же величину
подачи фрезы. В таблицах 4.8...4.12 приведены расчѐтные данные по
проверке воспроизводимости экспериментального материала по критерию
Кохрена и адекватности модели по критерию Фишера для указанных
величин. Как видно из таблиц 4.8...4.12 для всех серий экспериментов
выполняются условия (4.19 и 4.21), что свидетельствует об адекватности
модели взаимодействия дисковой фрезы с мерзлым грунтом.
Таблица 4.8- Проверка опытных данных проводилась по критерию Кохрена и
адекватности модели по критерию Фишера для изменения силы резания в
зависимости от ширины резца в условиях блокированного резания, при угле
резания равным 300, диаметре фрезы 1.1м., величине подачи на один резец
равной 0,002м., скорости резания 0,02м/с, толщине разрабатываемого слоя
грунта одной фрезой 0,5м и температуре воздуха –100С. ширина резца в
метрах, величина силы резания в ньютонах, единичная сила резания
составляет 55 ньютонов, доверительная вероятность РД=0,95
m
1
2
3
4
n
b
P
b
P
b
P
b
P
Э
0.009
Т
0,01 0.2
Э
0.01
Т
0.012
Т
Э
Т
0.001 0.65 0,001 0,000
7
0.0035 0.004 0.15 0,014 0.015
0.0075 0.008 0.25 0,009 0.01
0.01 0.012 0.35 0,007 0.007
5
0,0055
0,008
1
0.25
2
3
4
0.35 0.0075 0.00 0.3 0.009 0.008 0.5
7
0.45 0.005 0.00
0.4 0.007 0.006 0.3
5
0.55 0.0025 0.00
0.5 0.004 0.004 0.2
3
0,006
0,0075
0,000008
0,000007
0,000016
0,00006
0,5
3
0,68
0,0000005
0,000003
0,0000015
0,08
0,45
0,1
3
12
8,7
УЭ
D1
D1
ККЭ
q
ККТ
DСР
КФЭ
q1
q2
КФТ
0.6
Э
0.001
0,000029
0,0000008
0,02666
Примечание: Э - экспериментальные, а Т - теоретические данные.
Таблица 4.9- Проверка опытных данных проводилась по критерию Кохрена и
адекватности модели по критерию Фишера для изменения силы резания в
зависимости от скорости резания, при угле резания равным 30 0, диаметре
121
фрезы 1.1м., величине подачи на один резец равной 0,002м., ширине резца
0,01м, толщине грунта, разрабатываемого одной фрезой 0,5м и температуре
воздуха –100С. ширина резца в метрах, величина силы резания в ньютонах,
единичная сила резания составляет 55 ньютонов, доверительная вероятность
РД=0,95
m
n
1
V
P
1
0.15
Э
105
2
3
4
0.35
0.45
0.75
140
145
165
УЭ
D1
2
V
Т
100
142
146
160
P
V
0.2
Э
130
Т
130
0.3
0.4
0.5
145
145
145
140
145
150
139
623
D1
ККЭ
q
ККТ
DСР
КФЭ
q1
q2
КФТ
3
4
P
V
0.1
Э
55
Т
50
0.5
0.3
0.2
145
145
130
150
140
130
142
30
P
0.55
Э
150
Т
152
0.15
0.25
0.35
105
135
145
100
137
142
120
1859
139
443
25
0.014
14
0.031
2955
0.63
3
0,68
18
0.03
16
0.53
3
12
8,7
Примечание: Э - экспериментальные, а Т - теоретические данные.
Таблица 4.10- Проверка опытных данных проводилась по критерию Кохрена
и адекватности модели по критерию Фишера для изменения силы резания в
зависимости от величины подачи на один резец, при угле резания равным
300, диаметре фрезы 1.1м., скорости резания равной 0,02м/с, ширине резца
0,01м, толщине грунта, разрабатываемого одной фрезой 0,5м и температуре
воздуха –100С. ширина резца в метрах, величина силы резания в ньютонах,
единичная сила резания составляет 55 ньютонов, доверительная вероятность
РД=0,95
m
n
1
1
h
25
2
P
Э
125
h
Т
130
30
3
P
Э
120
P
h
Т
120
10
4
Э
200
h
Т
200
45
P
Э
50
Т
55
122
2
3
4
45
30
10
УЭ
D1
60
125
190
55
120
200
25
20
15
125
2816
D1
ККЭ
q
ККТ
DСР
КФЭ
q1
q2
КФТ
135
145
175
130
150
170
40
30
20
145
541
95
125
150
100
120
150
30
15
7
115
175
245
120
170
240
142
1975
146
6879
17
0.008
33
0.004
12211
0,56
3
0,68
58
0.02
25
0.046
3
12
8,7
Примечание: Э - экспериментальные, а Т - теоретические данные.
Таблица 4.11- Проверка опытных данных проводилась по критерию Кохрена
и адекватности модели по критерию Фишера для изменения силы резания в
зависимости от толщины грунта, разрабатываемого одной фрезой, при угле
резания равным 300, диаметре фрезы 1.1м., скорости резания равной 0,02м/с,
ширине резца 0,01м, величины подачи на один резец равной 0,02м и
температуре воздуха –100С. ширина резца в метрах, величина силы резания в
ньютонах, единичная сила резания составляет 55 ньютонов, доверительная
вероятность РД=0,95
m
n
1
Н
1
25
2
3
4
45
30
10
0,02
0,03
0,02
D1
ККЭ
q
ККТ
Н
P
Э
0,07
УЭ
D1
2
0,033
0,000572
Т
0,05
0,01
0,04
0,03
3
Н
P
30
Э
0,03
Т
0,04
25
20
15
0,07
0,05
0,03
0,05
0,045
0,04
4
Н
P
10
Э
0,02
Т
0,01
40
30
20
0,02
0,03
0,05
0,02
0,04
0,045
0,045
0,000366
0,03
0,0002
0,0012356
0,46
3
0,68
P
45
Э
0,02
Т
0,01
30
15
7
0,03
0,03
0,01
0,04
0,04
0,02
0,0225
0,000097
123
DСР
0,0002333
0,0002083
0,000075
КФЭ
0.4
0.57
0.375
q1
3
q2
12
КФТ
8,7
Примечание: Э - экспериментальные, а Т - теоретические данные.
0,000133
1,37
Таблица 4.12- Проверка опытных данных проводилась по критерию Кохрена
и адекватности модели по критерию Фишера для изменения силы резания в
зависимости от температуры поверхности льда, при угле резания равным 30 0,
диаметре фрезы 1.1м., скорости резания равной 0,02м/с, ширине резца 0,01м,
величины подачи на один резец равной 0,02м и толщине грунта,
разрабатываемого одной фрезой, равной 0,5 метра. ширина резца в метрах,
величина силы резания в ньютонах, единичная сила резания составляет 55
ньютонов, доверительная вероятность РД=0,95
m
n
1
Т
2
Р
1
Э
Т
0.20 0,07 0,05
2
3
4
0.30 0,20 0,15
0.40 0,25 0,20
0.50 0,25 0,20
УЭ
D1
0,195
0,0072333
D1
ККЭ
q
ККТ
DСР
КФЭ
q1
q2
КФТ
0,002633
0.364
Т
0.1
5
0.3
5
0.5
5
0.6
5
3
Р
Т
Р
Э
0,03
Т
0,02
Э
0.15 0,02
0,15
0,15
0,03
0,17
0,17
0,01
0.20 0,07
0.30 0,15
0.55 0,15
0,09
0,0048
4
0,1
0,0041
Т
Р
Т
Э
0,0 0.60 0,0
2 0.40 0,2
2
0,0
5 0.20 0,0
5
0,1
5 0.15 0,0
7
0,1
5
1
0,09
0,028566
0,435
3
0,68
0,000433
0,000133
0.09
0.0325
3
12
8,7
Примечание: Э - экспериментальные, а Т - теоретические данные
Т
0,01
0,20
0,05
0,02
0,012433
0,001
0.087
124
4.7. Методика определения сил сопротивления вращению рабочего
органа подкопочной машины
Наиболее простым способом найти усилие, действующее на рабочий
орган, имеющий электрический привод, является определение произведения
напряжения на электромоторе на потребляемую силу тока. Данная работа
была выполнена с использованием комплекса измерительной аппаратуры
RIGOL. В общем виде результаты работы могут быть проиллюстрированы
полученными зависимостями, показанными на рисунке 4.15. С учѐтом того,
что мощность на фрезерование мерзлого грунта представляет собой
произведение крутящего момента на частоту вращения рабочего органа,
накладывая на полученные результаты по мощности такую величину, как
скорость вращения рабочего органа (определяемую при помощи
индуктивного датчика скорости, применяемого в автомобильной
промышленности), можем получить реальное значение крутящего момента, а
зная расстояние от режущей кромки резца до оси вращения фрезы и силу
резания.
Полученные данные показывают, что изменением напряжения при
вращении электромотора можно пренебречь, а амплитуда колебания тока,
оставаясь постоянной, изменяет время своего воздействия, тем самым,
увеличивая потребляемую электромотором мощность.
Усилие резания на одном резце можно определить из уравнения 2.19
главы 2.
Также следует отметить, что величина силы резания грунта не является
постоянной величиной и зависит от суммарного усилия резания каждого из
резцов. В общем виде эта зависимость представлена на рисунке 2.22 главы 2.
а
б
Рисунок 4.15 Графические зависимости изменения мощности вращения
фрезерного рабочего органа подкопочной машины:
а – при свободном вращении б – при фрезеровании грунта;
1 – изменение силы тока; 2 – изменение напряжения
Тогда уравнение замедления вращения рабочего органа под действием
переменной силы резания примет вид:
125
Pl
i
i 1
J
2
a
P P
i 1
m
i
i 1
i
1
m
Рp
m
2
(1 d ) ,
(4.27)
1
где Рi– сила резания на i– ом резце, Рp– составляющая силы резания без учѐта
скорости, l– расстояние от резца до оси вращения фрезы, – частота
вращения фрезы, - линейная скорость резания, а m - масса рабочего органа.
Решая данное уравнение, получим:
Р
Р
( )
a
(1 ( 2 1 )) 2 1 p t p t ( 2 1 ) ( 2 1 )
m
t
m
m
Рp
Рp
t
m
(4.28)
Рp
(1 t )
m
С учѐтом того, что период изменения усилия на рабочем органе
зависит от скорости вращения фрезы и количества установленных резцов,
уравнение (4.28) примет вид:
Рp m
Рp
n
1
,
2 n(1 )
Рp
n (1 ) 1
(4.29)
где n– количество установленных на фрезе резцов. Решение данного
уравнения показано на рисунке 4.16.
Полученные данные свидетельствуют о том, что частота воздействия
силы резания и еѐ амплитуда оказывает существенное изменение в усилии
резания. Особенно резко возрастает усилие резание, и соответственно
момент сопротивления вращению, в случае если в забое не остаѐтся ни
одного резца. Следует отметить, что разница в максимальных и
минимальных скоростях вращения фрезы определяется параметрами рабочих
характеристик двигателя (мотор-редуктора). Для наиболее распространѐнных
типов привода, а именно асинхронных двигателях колебания скорости
вращения
фрезы
могут
достигать
величины,
равной
nPO 0,15
nНОМ
0,15 nНОМ РО [109],
i
рисунок 4.17, где nНОМ– номинальные
обороты электродвигателя, а i– передаточное отношение редуктора.
То есть пределы колебаний могут достигать 15%, что
(согласно уравнению 4.29) даѐт увеличение силы сопротивления резанию, а
значит и моменту сопротивления на валу рабочего органа более чем в 2 раза.
В результате чего процесс резания может быть нарушен, так как стандартное
отношение номинального и максимального крутящих моментов асинхронных
двигателей не превышает 2.
Аппроксимируя зависимость между номинальным и максимальным
моментом прямой линией, получим уравнение колебаний вращения рабочего
органа приводимым в действие асинхронным двигателем:
М p
M
Откуда:
13,333
1
n1
n1
13,3333
n (1 ) 1
(1 )n
126
1
n1
1
13,333 Δn
(4.30)
Тогда относительное колебание крутящего момента и усилия резания
может быть определено как:
Рp
Рp
М p
M
n1
13,333
.
Δn
1
(4.31)
Рисунок 4.16 Изменение усилия резания (крутящего момента на фрезе) в
зависимости от относительного изменения скорости вращения фрезы:
1- базовое количество резцов; 2 – уменьшенное в 2 раза количество
резцов; 3 - удвоенное количество резцов
Рисунок 4.17 Стандартная зависимость изменения мощности на валу
асинхронного электродвигателя от величины скольжения [109]
Полученные данные позволяют на этапе проектирования определить
как величину относительного колебания крутящего момента и силы
сопротивления вращения рабочего органа подкопочной машины, так и при
127
заданном значении
М p
M
относительного изменения крутящего момента для
конкретного двигателя определить минимально возможное количество
резцов в забое.
4.8. Результаты экспериментального исследования
В результате экспериментального исследования
были получены зависимости эталонной силы резания от температуры в
грунтах различного гранулометрического состава, представленные на
рисунке 4.18.
Полученные экспериментальные данные были
сравнены с теоретическими данными, полученными при использовании
условия прочности Кулона - Мора для хрупкого разрушения, что позволило
сделать вывод о том, что процесс фрезерование мѐрзлого грунта носит
хрупкий характер и аналогичен процессу фрезерования льда. Данное
заключение позволило использовать формулу для определения нагрузки на
единичном резце разработанную в работах Гасенина.
Рисунок 4.18 Экспериментально полученные зависимости эталонной силы
резания от температуры в грунтах различного гранулометрического состава
1 – суглинок ω=20,4%;
2 – супесь ω=15,2%;
3 – глина ω=31,2%;
4 – песок ω=11,4%
Так же были получены зависимости мощности фрезерования для
суглинка 70% влажности от температуры грунта, угла резания, ширины
резца, подачи, изображенные на рисунке 4.19.
128
м
мм
0,02
0,05
0,08
0,01
0,02
0,03
0,04
0,05
Рисунок 4.19 Зависимости мощности фрезерования
Выводы по главе 4
1 Сформулированы цель и задача экспериментального исследования,
разработан план многофакторного эксперимента. Проведена серия
экспериментов, состоящая из 27 циклов, для определения эталонных сил
резания и сдвига. На их основе получены уравнения регрессии,
позволяющее все остальные теоретические разработки сравнивать не с
дорогостоящими экспериментами, а непосредственно с ним.
2 Получены зависимости эталонной силы резания от температуры в грунтах
различного гранулометрического состава при использовании специально
разработанного стенда. Сравнение полученных экспериментальных
данных с теоретическими, полученными при использовании условия
прочности Кулона - Мора для хрупкого разрушения (глава 2), позволило
сделать вывод о том, что процесс фрезерование мѐрзлого грунта носит
хрупкий характер и аналогичен процессу фрезерования льда.
129
3 Проведено экспериментальное исследование процесса резания мерзлого
грунта как единичным резцом, так и рабочим органом в целом. Получены
зависимости мощности фрезерования для суглинка 70% влажности от
температуры грунта, угла резания, ширины резца, подачи. Из данных
зависимостей следует, что при увеличении ширины резцов (и,
следовательно, уменьшение их количества на фрезе), понижении
температуры грунта, а также увеличении подачи – увеличивается
мощность, необходимая на фрезерование мерзлого грунта, а при угле в 45
градусов для суглинка 70% влажности, мощность минимальна.
4 Полученные данные с использованием комплекса измерительной
аппаратуры RIGOL позволяют на этапе проектирования определить как
величину относительного колебания крутящего момента и силы
сопротивления вращения рабочего органа подкопочной машины, так и при
заданном значении
М p
M
(относительного изменения крутящего момента)
для конкретного двигателя определить минимально возможное количество
резцов в забое.
5 Проведена
проверка достоверности экспериментальных данных,
полученных при испытаниях натурных образцов фрез на величину
изменения силы резания и на производительность, на воспроизводимость
по критерию Кохрена и на адекватность математической модели по
критерию Фишера.
В ходе проверки установлена достоверность
результатов по обоим критериям, а относительная погрешность, в
зависимости от исследуемых параметров составила от 12 до 17%.
130
ЗАКЛЮЧЕНИЕ
1. Разработана методика выбора рациональных конструктивных параметров
и режимов работы рабочего органа машины, предназначенной для
удаления мерзлого грунта из-под трубопроводов, позволяющая уменьшить
энергоѐмкость разрушения мѐрзлого грунта на 20%. Отличительной
особенностью,
которой
является
проверка
на
динамическую
нагруженность фрезы, вследствие установки на неѐ резцов разной ширины,
установленных на разных диаметрах.
2. Разработана математическая модель разрушения мерзлого грунта под
трубопроводом, отличительной особенностью, которой является наличие
двух фрез, вращающихся во взаимно противоположных направлениях, с
резцами, расположенными на разных диаметрах.
3. Сформулирована и решена задача совершенствования эксплуатационных
показателей машины для удаления мерзлого грунта из-под трубопровода.
Установлено, что наиболее рациональным путем снижения энергоемкости
разрушения мерзлого грунта является переход от чистого резания к
резанию резцами, установленными на разном диаметре фрезы, режущими
грунт в разных условиях с разной скоростью. При этом сначала должны
прорезаться две узкие боковые щели, а потом резаться грунт, находящийся
в центре.
4. В результате проведенных расчетно-теоретических
исследований
определены рациональные, с точки зрения минимизации энергозатрат на
фрезерование, таких параметров рабочего органа подкопочной машины
как ширина резца, их количество, угол резания, скорости резания и
подачи.
5. Показаны области наиболее эффективного использования рабочего органа
машины, обладающего теми или иными конструктивными особенностями,
численные значения которых представлены в разделе рекомендации
6. Проведена
проверка достоверности экспериментальных данных,
полученных при испытаниях натурных образцов фрез на величину
изменения силы резания и на производительность, на воспроизводимость
по критерию Кохрена и на адекватность математической модели по
критерию Фишера.
В ходе проверки установлена достоверность
результатов по обоим критериям, а относительная погрешность, в
зависимости от исследуемых параметров составила 12-17%.
7. Результаты исследования внедрены в ООО «Промтех-НН» и
использованы при модернизации существующей подкопочной машины
ПТ-НН1020, а также при разработке перспективных проектноконструкторских решений для создания новых образцов подкопочных
машин; ООО «Машиностроительный инжиниринговый центр» при
разработке конструкций специальных машин.
Методики, алгоритмы и комплекс программ для ЭВМ используются в
учебном процессе на кафедре "Строительные и дорожные машины"
НГТУ, им. Р.Е. Алексеева, г. Н.Новгород, а также в научно-
131
исследовательской лаборатории специальных строительных и дорожных
машин (НИЛ ССДМ НГТУ, им. Р.Е. Алексеева, г.Н.Новгород).
132
РЕКОМЕНДАЦИИ ПО ВЫБОРУ РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ
ФРЕЗЕРНОГО РАБОЧЕГО ОРГАНА ПОДКОПОЧНОЙ МАШИНЫ
1. Для уменьшения суммарного усилия резания следует принимать ширину
боковых резцов равной 20 мм, а центрального – 50 мм. Общее количество
резцов на фрезе - 7 групп по 3 резца = 21 штука.
2. Угол резания должен составлять 45-50 град., в зависимости от типа
грунта: для суглинка =70% и глины =70% угол равен 50°; для песка
=17-20% угол равен 45°.
3. Скорость подачи должна быть максимальной, верхний предел которой
регламентируется условием прочности трубопровода:
RГР ≤ 3234 Н
4. Рациональные технологические режимы работы подкопочной машины для
грунтов различного типа: суглинка 70% влажности величина подачи
составит 20 мм/об, поступательная скорость машины - 28 мм/сек; для
глины
70% влажности величина подачи составит 25 мм/об,
поступательная скорость машины - 34 мм/сек; для песка 17-20%
влажности величина подачи составит 37 мм/об, поступательная скорость
машины - 50 мм/сек.
133
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1
Абдрахманов А.Ж. Повышение эффективности технологии замены
дефектного участка магистрального трубопровода : автореферат дис.
кандидата технических наук : 25.00.19– Уфа: Ин-т. проблем трансп.
Энергоресурсов, 2004. – 147с.
2
Абезгауз В.Д., Гальперин М.И.– Разработка мѐрзлых грунтов при
механизированном рытье траншей.- Готоптехиздат, Москва, 1962г.
3
Азметов Х.Л., Гумеров А.Г., Гумеров Р.С., Журавлев Г.В.,
Матлашов И.А. Ремонт магистральных трубопроводов в зимних
условиях// Новые технологии и материалы для строительства и
ремонта трубопроводов: Тез. докл. сем. Европейской комиссии
(Тюмень, 4-5 ноября 2003г.).- Тюмень, 2003.
4
Азметав Х.А., Кульгильдин С.Г. Современные способы капитального
ремонта магистральных нефтепроводов// Трубопроводный транспорт
нефти.-1997.
5
Абезгауз В.Д., Гальперин М.И.– Вопросы разработки и применения
машин для резания мѐрзлого грунта.- «Строительные и дорожные
машины», № 10, 1961г.
6
Абезгауз В.Д.– Энергоѐмкость процесса резания мѐрзлых грунтов при
проходке траншей.- «Строительство трубопроводов», № 8, 1958г.
7
Айзеншток И.Я.- О физической теории резания грунтов.- «Горный
журнал», 1949г, № 5.
8
Алексеева Т.В. и др.– Машины
Машиностроение, Москва, 1964г.
9
Амарян Л.С. – Свойства слабых грунтов и методы их изучения.- М.:
Недра, 1992г, 219с.
10
Артемьев К.А.– Теория резания грунтов землеройными машинами.Учебное пособие. Омск. ОмПИ, 1989г, 80с.
11
Артюшкин А.В., Богачѐв Д.В., Молев Ю.И. Прижимные движители
рабочего оборудования машин для ремонта трубопроводов.– М.:
Журнал «Строительные и дорожные машины», 2012.– № 8.– С. 22-25.
12
Артюшкин А.В. Очистная машина для ремонта и содержания
трубопроводов. Рекомендации по выбору типа движителя/
А.В. Артюшкин, В.С. Макаров, Ю.И. Молев, В.А. Шапкин//
Современные проблемы науки и образования: электронное научнотехническое издание.– 2013.– № 6.
для
землеройных
работ.-
134
13
Бабков В.Ф.– Основы грунтоведения и механики грунтов.- М.: В.Ш.,
1976 г, 328с.
14
Беккер М.Г- Введение в теорию
Машиностроение, 1973г, 520с., ил.
15
Бендант Дж., Пирсол А.- Измерение и анализ случайных процессов.
М.: Мир, 1974г.-208с., ил.
16
Берновский Ю.Н., Захарчук Б.З., Ровинский и др.– Машины для
разработки мерзлых грунтов.- М.: Машиностроение, 1973г.
17
Бородавкин П.П.– Механика грунтов в трубопроводном строительстве.- Недра, 1986г, 224с.
18
Булычѐв В.Г.– Механика дисперсных грунтов.- М.: Стройиздат, 1974г.
19
Вартанов С.Х.– Навесной траншеекопатель НТК-1.– «Строительные и
дорожные машины», № 4, 1966г.
20
Вартанов С.Х.– Создание машин и механизмов для разработки
мѐрзлых грунтов.– Труды IV Совещания-семинара по обмену опытом
строительства в суровых климатических условиях, Воркута, 1966г.
21
Веденяпин Г.В.- Общая методика экспериментального исследования и
обработки опытных данных.- М.: Колос, 1967г. -211с.,ил.
22
Вентцель Е.С.- Теория вероятностей.- М.: Наука, 1969г. -576с., ил.
23
Ветров Ю.А.- Прибор для определения сопротивления грунтов
резанию.- Сб. «Земляные работы». М., ВИНИТИ, 1957г.
24
Ветров Ю.А., Кисленко А.А.– Сопротивление резанию мѐрзлого
глинистого грунта.- «Строительные и дорожные машины», № 10,
1961г.
25
Ветров Ю.А., Дионисьев А.И.- Сопротивление горных пород резанию.Труды ВУГИ, Углетехиздат, Москва, 1951г.
26
Ветров Ю.А.– Сопротивление
университет, 1962г.
27
Вознесенский Е.А.– Динамическая неустойчивость грунтов.- М.:
Эдиториал УРСС, 1999г, 263с.
28
Волохов В.Я., Зайцев А.К. Оборудовать для ремонта магистральных
трубопроводов// Сооружение и ремонт газонефтепроводов и
местность-машина.-
грунтов
резанию.-
М.:
Киевский
135
газонефтехранилищ: Сб. научн, тр. -Уфа: Изд-во УГНТУ, 2002.
29
Войтковский К.Ф. Механические свойства льда. – М.: изд-во АН
СССР, 1960. – 283с
30
Вучков И., Бояджиева Л., Солаков Е. Прикладной линейный
регрессионный анализ. М.: Финансы и статистика, 1987. 239с.
31
Вялов С.С.// Реология мерзлых грунтов/ Под редакцией В.Н.
Разбегина.-М.: Стройиздат, 2000.-464с.
32
Газиев Э.Г.– Механика скальных пород в строительстве.- М.:
Стройиздат, 1977г.
33
Гасенин И.А. Выбор рациональных конструктивных параметров
рабочего органа машины для подкопа трубопровода в мерзлом грунте:
Дис. на соиск. ученой степ. канд. техн. наук:05.05.04/ НГТУ; Науч.
рук. А.П.Куляшов.- Защищена 30.06.04.-Н.Новгород:,2004.-192 с.:ил.Библиогр.: с. 125-131.- Прил.: с.132-192
34
Гальперин М.И.– Механические способы разрушения мѐрзлых
грунтов.- Л.Д.Н.Т.П., серия– строительная промышленность,
Ленинград, 1961г.
35
Гальперин М.И., Абезгаус В.Д.– Машины для резания камня.- Машгиз,
1964г.
36
Герсеванов Н.М., Польшин Д.Е.– Теоретические основы механики
грунтов и их практическое применение.- М.: Стройиздат, 1948г.
37
Гладов Г.И., Петренко А.М. Специальные транспортные средства:
Проектирование и конструкция: Учеб. для вузов/ под. ред.
Г.И. Гладкова.– М.: ИКЦ «Академкнига», 2004.– 320с.
38
Гольдштейн М.Н.– Механические свойства грунтов– 2-е изд-е,
переработ., М.: Стройиздат, 1973г.
39
Горелик Я.Б., Колунин В.С., Решетников А.К.- Криосфера Земли.1999г. Т.3. №1. С.69-77.
40
Гончаров К.О., Макаров В.С., Беляков В.В. Влияние экскавационнобульдозерных эффектов, возникающих при криволинейном движении
колеса на сопротивление качению // Наука и образование: электронное
научно-техническое издание.– 2010.– № 6.– С. 3.
41
Горячкин В.П.- Собрание сочинений.- Т I-IV, М., Сельхозиздат, 19391948 гг.
42
ГОСТ 8.10.7. Государственная система обеспечения единства
измерений. Прямые измерения с многократными наблюдениями.
Методы обработки результатов наблюдений. Основные положения.
136
43
Гриншпун Л.В.– Земляные работы.- М.: Стройиздат, 1992г, 351с.
44
Гумеров А.Г., Зайнуллин Р.С., Ямалеев К.М., Росляков А.В.- Старение
труб нефтепроводов.- М.: Недра, 1995.
45
Губанюк И.И. Повышение надежности и безопасности объектов
линейной части магистральных газопроводов: ГП. 06. 2004.
46
Денис Дж., Шнабель Р.- Численные методы безусловной оптимизации
и решения нелинейных уравнений.– М.: Мир, 1988г.– 440с.
47
Дерягин Б.В., Чураев Н.В. - Смачивающие пленки.- М., 1984.
48
Дженкинс Г., Ваттс Д,- Спектральный анализ и его приложения.- т.1,2
-М.: Мир, 1972г. -320с.,ил.
49
Джонсон Н., Лион Ф.- Статистика и планирование эксперимента в
технике и науке. Методы планирования эксперимента.- М.: Мир,
1981г, 520с., ил.
50
Джонсон Н., Лион Ф. Статистика и планирование эксперимента в
технике и науке: Методы обработки данных.-М.: Мир, 1980.-610с.,ил.
51
Домбровский Н.Г., Гальперин М.И.– Основные вопросы разрушения
твѐрдых и мѐрзлых грунтов.- Сборник «Вопросы механизации
открытых и горных земляных работ». Госстройиздат, 1961г.
52
Епифанов В.П. Кузьменко В.П.- Механика разрушения снега.– Изв.
АН СССР. Механика твѐрдого тела. 1986г. №4 С. 190-197.
53
Журнал – Трубопроводный транспорт нефти.– 1998– 2004 гг.
54
Зарубин В.С. Математическое моделирование в технике: Учеб./ Под
ред. В.С.Зарубина, А.П.Крищенко.-2-е изд., стер.- М.: Изд-во. МГТУ
им.Н.Э.Баумана, 2003.- 496 с.
55
Захарчук Б.З. и др.– Бульдозеры и рыхлители.- М.: Маш-е., 1987г,
235с.
56
Зеленин А.Н.- Физические основы теории резания грунтов.- М, АН
СССР, 1950г.
57
Зеленин А.Н.– Резание грунтов.- М, АН СССР, 1959г.
58
Зеленин А.Н.– Состояние и перспективы развития машин для
разработки мѐрзлых грунтов.- «Строительные и дорожные машины»,
№10, 1961г.
59
Зеленин А.Н.– Разрушение мѐрзлых грунтов резанием, ударом и
вибрацией. - ЦИНТИАМ ЦБТИ, Москва, 1962г.
137
60
Зеленин А.Н., Ровинский М.И. и др.– Исследование работы навесного
рыхлителя мѐрзлых грунтов.- «Тяжѐлое машиностроение», № 10,
1962г.
61
Зеленин А.Н.– Основы разрушения грунтов
способами. - М., «Машиностроение», 1968г.
62
механическими
Иванов А.А., Москвичев А.А. Проектирование нестандартного
автоматического оборудования: Контрольные задания для курсового
проектирования и метод. указ. по выполнению работы для
студ.спец.210200 и 210300 всех форм обучения/ НГТУ,
Каф."Автоматизация машиностроения"; Сост.: А.А. Иванов,
А.А.Москвичев; Науч. ред. О.В.Кретинин.-Н.Новгород: НГТУ,2005.89 с.
63
Исаева Л.К. Оценка эколого-экономического ущерба от загрязнения
окружающей среды нефтепродуктами при пожарах и авариях/ Исаева
Л.К.// Транспорт и хранение нефтепродуктов.-1998.
64
Калягин А.М., Жучков А.И., Романюк Г.Д.– Работа роторных
траншейных экскаваторов при разработке мѐрзлых грунтов.–
«Строительные и дорожные машины», № 10, 1961г.
65
Ким Б.Г. Строительные машины. Учебное пособие.- Владимир, ВГТУ
2004г.
66
Кисленко А.А.– Экспериментальные исследования процесса резания
мѐрзлых грунтов.- «Строительные и дорожные машины», № 12, 1963г.
67
Кисленко А.А.– Исследования процесса резания мѐрзлых грунтов.Диссертация на соискание учѐной степени к.т.н. КИСИ, 1964г.
68
Кулепов, В.Ф. Определение нагрузок на рабочие органы ледорезных
машин на основе численной реализации математической модели / В.Ф.
Кулепов, А.Л. Малыгин, В.В. Романов //Труды НГТУ– Т.45.Н.Новгород. 2004. С.105-109.
69
Кулепов, В.Ф. Определение нагрузок на диско-фрезерный рабочий
орган ледорезной машины / В.Ф. Кулепов, А.Л. Малыгин, В.В.
Романов
//Транспортно-технологические
машины.
Материалы
Всероссийской научно-тех. конф. Сб. ст.- Н.Новгород, НГТУ, 2004.С.79-82.
70
Климовский Л.П.– Строительные работы
Справочник. Киев.:Урожай, 1990 г, 166с.
71
Кравцов Э.А.– Интенсификация рабочих процессов землеройных
машин.- Учебное пособие. М.: МАДИ, 1988г, 90с.
в
зимний
период.-
138
72
Красников А.Ф. Разработка методики оценки эксплуатационной
надежности локальных участков трубопровода после ремонта :
автореферат дис. кандидата технических наук : 25.00.19– Тюмень:
Тюмен. гос. нефтегаз. ун-т, 2005.– 161с.
73
Кудрявцев В.Н. и Кирдяшев Ю.Н.–
Справочник. Ленинград. «Маш-е»., 1977г.
74
Кузнецов Б.В, Куляшов А.П., Шапкин В.А., Молев Ю.И.– Лед, снег.
Методы разработки.- Н.Новгород, ННПК, 2003г.-392с.
75
Кутергин В.Н. – Закономерности изменения свойств глинистых
грунтов при вибрации. – Наука, 1989 г, 141с.
76
Планетарные
передачи.-
Лепешкин А.В. и др. Гидравлика и гидропневмопривод: Учебник.Ч.2:
Гидравлические машины и гидропневмопривод/ Лепешкин А.В.,
Михайлин А.А., Шейпак А.А.; Моск. индустриальный ун-т, Ин-т
дистанционного образования; Под ред. А.А. Шейпака.- М.: Изд-во.
МГИУ, 2003.-352 с.
77
Лозовой Д.А., Запускалов В.А, Веденеев С.А.– Фрезерная машина для
разработки мѐрзлых грунтов.- «Строительные и дорожные машины»,
№ 2, 1967г.
78
Львов П.Н.– Износостойкость деталей строительных и дорожных
машин.– Машгиз, Москва, 1962г.
79
Матлашов И.А. Разработка метода капитального ремонта
трубопроводов большого диаметра в условиях отрицательных
температур : автореферат дис. кандидата технических наук : 25.00.19–
Уфа: Ин-т проблем трансп. Энергоресурсов, 2004.– 127с.
80
Мартюченко И.Г., Кузяев А.И.– Механизация разработки мерзлых
грунтов.- учебное пособие, Сарат гос. Техн. Ун-т, Саратов, 1993г.
81
Маэно Н. Наука о льде.- М., 1988г.
82
Минаев В.И. Машины для строительства
трубопроводов.– М: Недра, 1985.- 440 с.
83
Моисеенко В.Г.– Прогнозирование рабочих нагрузок в особых
условиях.- Киев. В.Ш., 1987г.
84
Монтгомери Д.К. Планирование эксперимента и анализ данных.- Л.:
Судостроение, 1980.- 381с.
85
Назаровский А. А.- Исследование процессов фрезерования льда
концевой фрезой со встроенным шнековым транспортером.Кандидатская диссертация. Н. Новгород, 1972.
магистральных
139
86
Николаев А. Ф.– Исследование отрывки траншей фрезерным способом
для прокладки бронированных кабелей в разных грунтах, включая
промѐрзшие.- Диссертация на соискание учѐной степени к.т.н., ГПИ,
1953г.
87
Николаев А. Ф.- Исследования и комплекс машин для разработки
мерзлых грунтов, льда и снега.- Обобщающий доклад о совокупности
работ, представленных на соискание ученой степени доктора
технических наук, ГПИ, 1967г, с.7.
88
Николаев А.Ф., Федин И.В., Назаровский А.А.– Фрезерный траншее
копатель ФТК-ГПИ-47.- «На стройках России», № 10, 1965г.
89
Николаев А.Ф., Федин И.В., Поль Л.Р.– Новая машина для разработки
мѐрзлых грунтов.- «Строительные и дорожные машины», № 10, 1964г.
90
Новицкий С.М.– Электроподогрев грунта при напряжении 1300 вт.–
«Строительная промышленность», № 9-10, 1946г.
91
Новицкий П.В., Зограф И.А. Оценка погрешностей результатов
измерений.-Л.: Энергоатомиздат. Ленингр. отд., 1985.-248 с.
92
Нурок Г.А.– Утепление зимних забоев для экскаваторных и
гидромеханизированных работ.- «Строительная промышленность»,
№9, 1948г
93
Пекарская Н.К., Ровинский М.И. и др.– Исследование параметров
прочности мѐрзлых грунтов, определяющих процесс их разрушения
землеройными машинами.- Труды IV Совещания– семинара по обмену
опытом строительства в суровых климатических условиях, Воркута,
1966г.
94
Пищинер В.Б.- Совершенствование инструмента для резания мѐрзлых
грунтов.- Томск. Издат-во Томского университета, 1991г, 210с.
95
Полтавцев И.С.– Канавокопатели фрезерные.– Машгиз, Москва,
1954г.
96
Пуртов А.Р.– Выбор конструктивных параметров рабочего органа, для
удаления снежных накатов и льда с бетонных покрытий.- Н.Новгород.
2002г.
97
Растегаев И.К.– Машины для вечномерзлых грунтов.- Учеб. Пособие
для вузов по специальности «Строительные и дорожные машины и
оборудование».– М.: Машиностроение, 1986г.
98
Рекомендации по определению физико-механических свойств мѐрзлых
грунтов геофизическими методами.- М.: Стройиздат, 1989г, 55с.
140
99
Ровинский М.И., Баландин В.П.– Экспериментальные исследования
рабочих органов экскаваторов.- Труды ВНИИ Стройдормаш, выпуск
XXIII, 1958г.
100 Родин И.И., Соколов Л.К.– Основы проектирования многоковшовых
экскаваторов непрерывного действия.- Учебное пособие. Красноярск,
1987г, 226с.
101 Румянцев В.А. и др.– Цепные траншейные экскаваторы.- Машгиз,
1963г.
102 Селеневич А.С.– Машины для разработки мѐрзлых грунтов на ВДНХ
СССР.– «Строительные и дорожные машины», № 2, 1963г.
103 Сергеев А.И.– Разработка
строительства», № 1, 1956г.
мѐрзлых
грунтов.–
«Механизация
104 Сергеев А.И.– Машины для разработки мѐрзлых
«Строительные и дорожные машины», № 10, 1961г.
грунтов.–
105 Смородинов М.И.– Износостойкие инструменты для строительных
машин.– Машгиз, Москва, 1963г.
106 Смородинов
М.И.,
Фѐдоров
А.Н–
Некоторые
вопросы
конструирования машин для резания мѐрзлого грунта и задачи
исследований.– «Строительные и дорожные машины», №» 4, 1962г.
107 Спиваковский А.О., Зеленин А.Н.– Основные проблемы резания
грунтов.- Известия АН СССР, № 7, 1949г.
108 Строительство трубопроводов на слабых грунтах. / Р. М. Султанов, Б.
В. Кузнецов, Ю. В. Щербаков, А. П. Куляшов, В. А. Шапкин - Нижний
Новгород, НПК, 2002. - 390 с.
109 Справочник по электрическим машинам: В 2 т. / пол общ. ред. И. П.
Копылова и Б. К. Клокова. Т. 1.– М.: Энергоатомиздат, 1988.– 456 с.:
ил.
110 Суриков В.В.– Роторные экскаваторы для с/х мелиораций.- М.:
Агропромиздат, 1987г, 342.
111 Трупак Н.Г. Замораживание грунтов в подземном строительстве- М.:
Недра, 1974.— 280 с.
112 Турчак П.И. Основы численных методов. М.: Наука, 1987. 320с.
113 Утенков В.Ф.– Подготовка грунтов к экскавации в зимнее время. «Строительная промышленность», №9, 1950г.
141
114 Федин И.В.- Исследование процесса отрывки траншей в мерзлых
грунтах машинами фрезерного типа с концевой и дисковой фрезами.Кандидатская диссертация. Н. Новгород, 1969.
115 Федин И.В.– Фрезерование мѐрзлого грунта концевой фрезой.– Труды
ГПИ, том XXIII, выпуск 8, 1967г.
116 Фѐдоров Д.И.– Рабочие органы землеройных машин.- М.: Маш-е,
1990г, 358с.
117 Федорович Д.И.– Рабочие органы землеройных машин.- 2-е изд.,
переработ. и доп.– М.: Маш-е, 1989г, 386с.
118 Федулов А.И.– К вопросу о резании мѐрзлых грунтов.– «Механизация
строительства», № 5, 1953г.
119 Филяков А.Б.- Взаимодействие рабочих органов перегрузочных машин
с насыпными грузами : монография / А. Б. Филяков ; Астрах. гос. техн.
ун-т.- Астрахань : АГТУ, 2004. - 175 с.
120 Холодов А.М.– Проектирование машин для земляных работ.- Харьков.
В.Ш., 1986г, 270с.
121 Хархута Н. Я.- Машины для уплотнения грунтов. Теория, расчет и
конструкции.Состояние: Хорошее. Штампы. Потертость.- Машгиз,
1953г., 164с.
122 Цытович Н.А.– Механика мѐрзлых грунтов.- М.: Изд-во МГУ, 1978г.
123 Чеченков М.С.– Разработка прочных грунтов.- Л.: Стройиздат, 1987г,
231с.
124
Чумаченко Ю.Т. и др. Материаловедение для автомехаников: Учеб.
пособие / Чумаченко Ю.Т., Чумаченко Г.В., Герасименко А.И.-3-е изд.
доп. и перераб.- Ростов н/Д: Феникс, 2004.-480 с.
125 Швецов Г.И.– Инженерная геология, механика грунтов, основания и
фундаменты.- М.: В.Ш., 1987г, 295с.
126 Шейков М.Л. Сопротивление сдвигу мерзлых грунтов. Лабораторное
исследование механических свойств мерзлых грунтов.- Москва.,
Сборник № I. 1936.
127 Шимко П.Д. и Власов М.П. Статистика./Серия «Учебники и учебные
пособия».- Ростовн/Д: Феникс 2003.-488с.
128
Штойер Р. Многокритериальная оптимизация. Теория, вычисления и
приложения: Пер. с англ.- М.: Радио и связь, 1992.– 504с.
142
Щемелев А.М. и др. Строительные машины и средства малой
механизации: Учеб. пособие/ Щемелев А.М., Партнов С.Б.,
Белоусов Л.И.- Минск: Дизайн ПРО,2002.-272 с.
130 The Lake Baikal Neutrino Project /Belolaptikov I.A. et al.// Proc. 3 rd Int.
Workshop on Neutrino Telescopes.- Venice, 1991.
131 Ehrlich, J.R., Water performance of amphibious vehicles. Part 2. Propulsion
and maneuverability/ J.R. Ehrlich, J.O. Kamm, G. Worden.–Journal of
Terramechanics,1970, Vol. 7, №3-4, P.69-99.
132 I n s p e r g e r T., S t e p a n G. Stability of the milling process// Periodical
Polytechnic-Mechanical Engineering.– 2000.– Vol. 44/1.– P. 47–57.
129
143
ПРИЛОЖЕНИЕ. 1
КРАТКОЕ ОПИСАНИЕ, ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И
ПРИНЦИП РАБОТЫ ИСПЫТУЕМЫХ МАШИН СЕРИИ МПА
144
КРАТКОЕ ОПИСАНИЕ, ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ И
ПРИНЦИП РАБОТЫ ИСПЫТУЕМЫХ МАШИН СЕРИИ МПА.
Основной объѐм испытаний проводился на созданной в 2007 году
машина подкопочная ПТ-НН-1020П, общий вид которой показан на рисунок
П.3.1. Кроме того, в работе были использованы данные, полученные в
результате испытаний машин для ремонта и содержания трубопроводов в
разное время изготовленных и испытанных в ООО «НПК ПРОМТЕХ-НН».
Технические характеристики которых приведены в таблице П3.1.
Рисунок П.3.1. Машина подкопочная ПТ-НН-П
Таблица П3.1
Основные технические характеристики подкопочных машин
Марка
ПТ-НН
530П
ПТ-НН
820П
ПТ-НН
1020П
ПТ-НН
1420П
Диаметр трубопровода, мм
530
720; 820
1020;
1220
1420
Глубина подкопа под трубой, мм,
не менее
650
650
600
600
Категория разрабатываемых
грунтов
I-V
I-V
I-V
I-V
Производительность в грунтах I
категории, пог.м/час
90
90
70
70
Установленная мощность
оборудования, кВт
41
41
50
55
Масса, кг
3500
3500
4700
6500
145
Габаритные размеры:
длина, мм
3000
3000
3475
3660
ширина (без пульта управления,
со сведенными роторами), мм
2420
2420
3200
3390
высота, мм
2450
2630
2700
2990
Машины для подкопа трубопроводов типа МПА предназначены для
разработки и удаления грунта из-под трубопроводов диаметрами 720, 820,
1020 и 1220мм, предварительно вскрытых сверху и с боков.
Машина, изображенная на рисунке П.3.2., оборудована шагающим
типом движителя, содержит тележку 1, элементы подвижной опоры на
трубопровод 3, полозки 4, режуще-отвальный орган в виде двух роторов 4 с
ножами, приводами их вращения и монтажно-установочного разведения (не
обозначен).
В задней части тележки 1 смежно друг с другом установлены два
толкающих привода ее поочередной шаговой подачи по трубопроводу 2 с
передним 5 и задним 6 его захватами своими приводами сжатия (не
обозначены). Данная система и представляет шагающий движитель (рисунок
П.3.3.)
Захваты 5 и 6, закрепленные на штангах 7, 8 квадратного сечения,
установленных в направляющих шахтах 9, 10 задней части тележки и
шарнирно связанных со штоками гидроцилиндров 11, 12, закрепленных на
этой тележке.
Штоковые полости гидроцилиндров 11, 12 гидравлически соединены
между собой, а поршневые- через блок управления- с гидронасосом (не
показаны).
Машину используют следующим образом. В начале производят работы
по предварительному вскрытию трубопровода 2 сверху (бульдозером) и с
боков- ковшовыми экскаваторами, причем последние вырывают боковые
траншеи с глубиной, превышающей задаваемую величину подкопа
непосредственно под трубопроводом 2- эти превышения образуют так
называемые приямки по бокам от него ( размер "d" на рисунке П.3.2.а).
На очищенный участок трубопровода 2 устанавливают на полозки 3
тележку 1 с разведенными для этого роторами 4 (посредством шарниров и
специального привода, не показанных на чертеже). После чего с помощью
блока управления сводят роторы 4 в исходное рабочее положение (рисунок
П.3.2.в), включают привод зажима заднего захвата 6, привод вращения
роторов 4 и подают рабочее давление в поршневую полость гидроцилиндра
11.
При этом сила давления на поршень этого цилиндра 11 через опорную
тягу 8 передается на захват 6, зажатый на трубопровод 2, а сила, давящая на
дно гидроцилиндра, закрепленного в тележке 1, обеспечивает ее подачу
146
вперед на величину рабочего хода "S" (рисунок П.3.2.а). Во время этого хода
роторы 4 разрушают грунт под трубопроводом 2 (зона "b" на рисунке
П.3.2.а), отваливая его в приямки (зоны "а" на рисунке П.3.2.а). При этом
туда же удаляются (в том числе с помощью щита 13 - на передней части
тележки 1) объемы грунта с верхней и боковых (зона "с" и "е" на рисунке
П.3.2.а,б) частей трубопровода 2.
а)
б)
в)
Рисунок П.3.2. Машина для подкопа трубопроводов серии МПА
а – вид сбоку; б – вид сверху; в – вид сзади
147
Рисунок П.3.3. Тяговые тележки
Одновременно с ходом "S" тележки 1 вперед передний захват 5 за счет
подачи рабочей жидкости в штоковую полость гидроцилиндра 12,
вытесняемую из штоковой полости гидроцилиндра 11, также переместится
вперед на величину "S" относительно тележки и на "2S" относительно
трубопровода 2 (рисунок П.3.2.а) в положение, смежное с задней частью
тележки 1.
Для подачи тележки 1 на следующий ход (шаг) "S" с помощью блока
управления осуществляют разжатие трубопровода 2 задним захватом 6,
зажатие его передним 5 и подачу давления в поршневую полость
гидроцилиндра 12, который и осуществляет дальнейшее перемещение
тележки 1 вперед, а обратное перетекание рабочей жидкости между
штоковыми полостями гидроцилиндров 11 и 12 обеспечит перемещение
заднего захвата 6 вперед на расстояние "S" в положение, смежное с передним
захватом 5, от трубопровода 2, поскольку он будет всегда уравновешен
компенсирующим моментом от зажима трубопровода 2 одним из захватов.
Таким образом, все элементы машины приходят в исходное
положение, изображенное на рисунке П.3.2.а; цикл закончен, а дальнейшее
движение тележки 1 осуществляется его повторением в автоматическом
режиме.
148
ПРИЛОЖЕНИЕ. 2
ТЕКСТ ПРОГРАММЫ В СРЕДЕ MATLAB
149
ТЕКСТ ПРОГРАММЫ В СРЕДЕ MATLAB
ПРЕДНАЗНАЧЕННОЙ ДЛЯ ВЫЧИСЛЕНИЯ МЕХАНИЧЕСКИХ
ПАРАМЕТРОВ ВЗАИМОДЕЙСТВИЯ ФРЕЗЕРНОГО РАБОЧЕГО ОРГАНА
С РАЗРАБАТЫВАЕМЫМ МЕРЗЛЫМ ГРУНТОМ
%
% В состав программы входят:
% 1. управляющая программа (файл shfreza.m)
% 2. ф-ция yadro(Lv,H,b1,b2,Vp) (файл yadro.m)
% 3. ф-ция Puzsh1(Sz,fi,H,gamma) (файл puzsh1.m)
% 4. ф-ция graf(x,fun,dpzn,titl,xlbl,ylbl,color,yngrid) (файл graf.m)
%
% Запуск программы на выполнение:
% В командной строке окна системы Matlab ввести
%
shfreza
% и нажать Enter
%
% Получение справочной информации:
% В командной строке окна системы Matlab ввести
%
help имя M-файла (например, help shfreza или help puz2)
% и нажать Enter
%--------------------------------------------------------------------%shfreza.m - файл сценария (управляющая программа)
%
%
Входные параметры:
%D
- диаметр фрезы = 1.00м
%Lv
- расст-е от верха фрезы до дневн. пов-сти грунта = 0.985-0.97м
%H
- толщина разрабатываемого грунта
= 0.001-0.010м
%t
- температура пов-сти грунта = 5град С
%b1
- ширина резца
= 0.5-3мм
%alfa - угол резания
= 90град
%B
- ширина фрезы
= 2000мм
%Pe
- эталонная сила резания
= 56н
%z
- число ножей на фрезе
= 20-500
%Vp
- скорость подачи
= 100-1000м/ч
%Vre - скорость резания
= 0.5-13.0м/с
%
%
Выходные параметры:
%Mkr
- крутящий момент
f(teta = 0-360град.)
%Pv
- вертикальная сила f(teta = 0-360град.)
%Pp
- усилие подачи
f(teta = 0-360град.)
%Mkrsr - ср. значение крутящего момента
%Pvsr - ср. значение вертикальной силы
%Ppsr - ср. значение усилия подачи
%Mkrmax- max значение крутящего момента
%Mkrmin- min значение крутящего момента
%Ppmax - max значение усилия подачи
%Ppmin - min значение усилия подачи
%E
- энергоемкость
%KDMkr - коэф. динамичности по крутящему моменту
%KDPp - коэф. динамичности по усилию подачи
%
Используемые ф-ции:
%yadro(Lv,H,b1,b2,Vp)
%graf(x,fun,dpzn,titl,xlbl,ylbl,color,yngrid)
% const
global D Pe t alfa B Vre z n schema
D = 1.00; Pe = 56; t = 5; alfa = 90; B = 2000; Vre = 3.27; z = 75;
n = 0;
150
Lv = 0.985; % 0.985-0.97м
H = 0.005;% 0.001-0.01м
b1 = 0.5;
% 0.5-3мм
Vp = 1000; % 100-1000м/ч
Углы:
% beta, gamma, fi - в радианах
% beta0, gamma0, fi0 - в градусах
% teta, n
- в градусах
gamma=acos( (D-2*Lv)/D ); gamma0 = gamma*180/pi;
Sz=Vp*pi*D/(36*Vre*z);
if H >= D*(1+cos(gamma))/2
beta=0;
else
beta=acos( (2*H-D*cos(gamma))/D );
end
beta0 = beta*180/pi;
fi=beta; fi0 = fi*180/pi;
Buz = B;
Bsh = B;
end
teta = 0; priznak = 0;
% Начало цикла по teta (угол поворота фрезы)
while teta <= 360
% Блок-схема -- соединители 2, 4
if priznak == 0
Pi =
Mkri
Pvi
Ppi
fi =
Puzsh1(Sz,fi,H,gamma);
end
= Pi*D/2;
= Pi * ( sin(fi)-0.3*cos(fi) );
= Pi * ( cos(fi)+0.3*sin(fi) );
fi + 2*pi/z;
fi0 = fi0 + 360/z;
%Начало 1-го цикла while gamma0 <= (180-fi0)
while gamma0 <= (180-fi0)
Pii = Puzsh1(Sz,fi,H,gamma);
end
Mkrii = Pii*D/2;
Pvii = Pii * ( sin(fi)-0.3*cos(fi) );
Ppii = Pii * ( cos(fi)+0.3*sin(fi) );
Mkri = Mkri + Mkrii;
Pvi = Pvi + Pvii;
Ppi = Ppi + Ppii;
fi = fi + 2*pi/z;
fi0 = fi0 + 360/z;
if gamma0 > (180-fi0), break;
end
Pii = Puzsh1(Sz,fi,H,gamma);
end
Mkrii = Pii*D/2;
Pvii = Pii * ( sin(fi)-0.3*cos(fi) );
Ppii = Pii * ( cos(fi)+0.3*sin(fi) );
Mkri = Mkri + Mkrii;
Pvi = Pvi + Pvii;
Ppi = Ppi + Ppii;
fi = fi + 2*pi/z;
fi0 = fi0 + 360/z;
end
%Конец 1-го цикла while gamma0 <= (180-fi0)
end %Конец if priznak == 0
if priznak == 1
Pi = Puzsh1(Sz,fi,H,gamma);
Mkri = Pi*D/2;
end
151
Pvi = Pi * ( sin(fi)-0.3*cos(fi) );
Ppi = Pi * ( cos(fi)+0.3*sin(fi) );
fi = fi + 2*pi/z;
fi0 = fi0 + 360/z;
%Начало 2-го цикла while gamma0 <= (180-fi0)
while gamma0 <= (180-fi0)
Pii = Puzsh1(Sz,fi,H,gamma);
Mkrii = Pii*D/2;
end
Pvii = Pii * ( sin(fi)-0.3*cos(fi) );
Ppii = Pii * ( cos(fi)+0.3*sin(fi) );
Mkri = Mkri + Mkrii;
Pvi = Pvi + Pvii;
Ppi = Ppi + Ppii;
fi = fi + 2*pi/z;
fi0 = fi0 + 360/z;
if gamma0 > (180-fi0), break;
end
Pii = Puzsh1(Sz,fi,H,gamma);
end
Mkrii = Pii*D/2;
Pvii = Pii * ( sin(fi)-0.3*cos(fi) );
Ppii = Pii * ( cos(fi)+0.3*sin(fi) );
Mkri = Mkri + Mkrii;
Pvi = Pvi + Pvii;
Ppi = Ppi + Ppii;
fi = fi + 2*pi/z;
fi0 = fi0 + 360/z;
end
%Конец 2-го цикла while gamma0 <= (180-fi0)
end % Конец if priznak == 1
% Блок-схема -- соединитель 3
Mkr(teta+1) = Mkri;
Pv(teta+1) = Pvi;
Pp(teta+1) = Ppi;
teta = teta + 1;
if teta > 360, break;
end
n = n + 1;
if n < round(360/z)
fi0 = beta0 + n;
end
if n >= round(720/z)
n = 0; fi0 = beta0 + n;
end
if (n >= round(360/z)) & (n
fi0 = beta0 + n - 360/z;
end
fi = fi0*pi/180;
priznak = 0;
fi = fi0*pi/180;
priznak = 0;
< round(720/z))
fi = fi0*pi/180;
priznak = 1;
end
% Конец цикла по tet
Mkr=zeros(1,361);
Pv=zeros(1,361);
Pp=zeros(1,361);
Teta = 0:360;
[Mkr,Pv,Pp] = yadro(Lv,H,b1,b2,Vp);
Mkrsr = trapz(Teta,Mkr)/360;
Pvsr = trapz(Teta,Pv) /360;
Ppsr = trapz(Teta,Pp) /360;
E = Ppsr/(B*H) + ( 2*Mkrsr/(D*B*H) ) * ( Vre*3600/Vp );
Mkrmax = max(Mkr);
Mkrmin = min(Mkr);
KDMkr = 2*(Mkrmax-Mkrmin)/(Mkrmax+Mkrmin);
Ppmax = max(Pp);
Ppmin = min(Pp);
KDPp
= 2*(Ppmax-Ppmin)/(Ppmax+Ppmin);
Pvmax = max(Pv);
Pvmin = min(Pv);
fprintf('
Схема %g\n',schema);
152
fprintf('Mkrmax = %e\nMkrmin = %e\n',Mkrmax,Mkrmin);
fprintf('Ppmax = %e\nPpmin = %e\n',Ppmax,Ppmin);
fprintf('Pvmax = %e\nPvmin = %e\n',Pvmax,Pvmin);
fprintf('Mkrsr = %e\nPpsr
= %e\nPvsr
= %e\n',Mkrsr,Ppsr,Pvsr);
fprintf('E
= %e\n',E);
fprintf('KDMkr = %e\nKDPp
= %e\n',KDMkr,KDPp);
dpzn = [0 360];
xlbl = 'угол поворота фрезы, град.';
ylbl = 'крутящий момент, н x м';
graf(Teta,Mkr,dpzn,titl,xlbl,ylbl,'r',1); %print -djpeg90 d:\alex\mlab\gr
pause(5);
ylbl = 'вертикальная сила, н';
graf(Teta,Pv,dpzn,titl,xlbl,ylbl,'m',1); %print -djpeg90 d:\alex\mlab\gr
pause(5);
ylbl = 'усилие подачи, н';
graf(Teta,Pp,dpzn,titl,xlbl,ylbl,'b',1); %print -djpeg90 d:\alex\mlab\gr
function y = graf(x,fun,dpzn,titl,xlbl,ylbl,color,yngrid)
% Ф-ция graf - файл graf.m
% Вывод графика ф-ции y=fun(x)
% Вызов ф-ции:
%
graf(x,fun,titl,xlbl,ylbl,color,yngrid)
% Входные параметры:
%
x
- значения аргумента (вектор)
%
fun
- значения ф-ции (вектор)
%
dpzn
- диапазон аргумента при выводе графика
%
(вектор -- [нач_значение кон_значение])
%
titl
- заголовок графика
%
xlbl
- название оси Ox
%
ylbl
- название оси Oy
%
color - цвет графика
%
yngrid - 0 (сетка не выводится), не 0 (сетка выводится)
% Выходные параметры:
%
y = 1
scrsz=get(0,'ScreenSize');
figure('Position',[2*scrsz(3)/5-10,scrsz(4)/3-10,...
3*scrsz(3)/5,3*scrsz(4)/5]);
plot(x,fun,color)
xlim(dpzn);
if yngrid ~= 0, grid; end
title(titl)
xlabel(xlbl)
ylabel(ylbl)
zoom
y=1;
function y = Puzsh1(Sz,fi,H,gamma)
% Ф-ция Puzsh1 - файл puzsh1.m
% Схема 1: Вычисление силы резания на ноже
% Вызов ф-ции:
%
Puzsh1(Sz,fi,H,gamma)
% Входные параметры:
%
Sz
%
fi
%
H
- толщина разрабатываемого слоя грунта = 1.0-1.2м
%
gamma % Выходные параметры:
%
y - сила резания на ноже
global D Pe t alfa B Vre
%D
- диаметр фрезы
= 1.00м
%Pe
- эталонная сила резания
= 56н
153
%t
- температура пов-сти грунта = 5град С
%alfa - угол резания
= 90град
%B
- ширина фрезы
= 2м
%Vre - скорость резания
= 3.27м/с
a0 = Pe * (Sz*sin(fi))^0.47;
b0 = 1 + 0.865 * (B-1);
c0 = 1 + 0.06*t * ( 1 - D * ( cos(gamma)+cos(fi) )/(2*H) );
d0 = 1 + 0.1*Vre;
e0 = ( 1 + 3.2*0.001*(alfa-40)*(alfa-40) ) * 1.9;
y = a0 * b0 * c0 * d0 * e0;
154
ПРИЛОЖЕНИЕ. 3
АКТЫ ВНЕДРЕНИЯ РЕЗУЛЬТАТОВ РАБОТЫ
155
156