1 Лекция № 9. РАБОЧИЕ ПЕРЕМЕЩЕНИЯ ЗЕМСНАРЯДОВ
advertisement

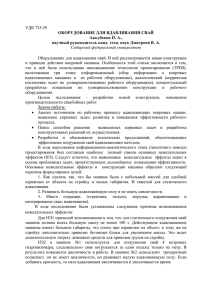
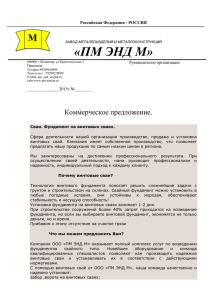
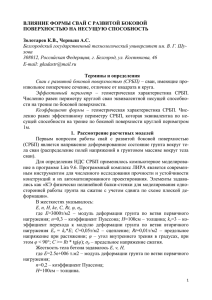
Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 1 Лекция № 9. РАБОЧИЕ ПЕРЕМЕЩЕНИЯ ЗЕМСНАРЯДОВ. ТРОСОВОЕ И СВАЙНОЕ ОБОРУДОВАНИЕ Землесосный снаряд, как и любая другая горная машина, должен передвигаться по мере разработки забоя для обеспечения постоянного контакта грунтозаборного устройства с забоем. Такие перемещения принято называть рабочими. Цель настоящей лекции – дать основные сведения о способах рабочих перемещений земснарядов, об оборудовании для их реализации и основах его расчета. В результате изучения материала этой лекции студенты должны знать: способы рабочих перемещений земснарядов, конструкцию рабочего оборудования для осуществления рабочих перемещений, основы расчета оборудования; уметь: производить выбор рационального способа рабочих перемещений, выполнять расчет свайного и якорного оборудования земснаряда. Общие сведения Рабочие перемещения земснаряда (папильонирование) – передвижения земснаряда по мере разработки забоя. Назначение этих перемещений обеспечение постоянного контакта грунтозаборного устройства с забоем. Рабочие тросы называют папильонажными тросами, а рабочие лебедки — папильонажными лебедками. В зависимости от условий работы землесосного снаряда, характера грунтов и назначения выемки к способам рабочих перемещений предъявляются различные требования. На добычных и дноуглубительных работах рабочие перемещения должны обеспечивать максимальную отработку выемочного участка, точное выполнение заданного профиля с минимальными переборами и недоборами. Средства рабочих перемещений в этом случае должны обеспечивать возможность быстрого отхода снаряда в сторону с судового хода. Если забой разрабатывается для возведения намывного сооружения, то чистота отработки профиля, очевидно, не будет иметь принципиального значения. Для строительных землесосных снарядов обычно отпадает требование обеспечения быстрого ухода из прорези. Общие требования к средствам и способам рабочих перемещений: • Средства рабочих перемещений должны с достаточной точностью обеспечивать перемещение грунтозаборного устройства по заданным траекториям с заданной регулируемой скоростью. • Усилия, развиваемые средствами рабочих перемещений, должны быть достаточны не только для преодоления реактивных сил, возникающих в процессе разработки грунта, но и для преодоления всех других внешних нагрузок на корпус снаряда (ветер, течение, влияние плавучего пульповода и т. п.). Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 2 Колебания суммарной величины сил сопротивления рабочим перемещениям не должны влиять на заданную скорость этих перемещений. • Средства для рабочих перемещений должны по возможности исключать необходимость холостых перемещений, т. е. движения грунтозаборного устройства по выработанным участкам забоя. Также должны быть сведены к минимуму простои, связанные с перекладкой якорей, перезарядкой свай и тому подобными операциями. Способы рабочих перемещений Тросовый способ рабочих перемещений На рис. 1 показана принципиальная схема тросового способа рабочих перемещений. В этом случае на снаряде устанавливается шесть папильонажных лебедок и соответственно завозится шесть якорей. Манипуляция этими лебедками позволяет перемещать землесосный снаряд вдоль и поперек прорези. Рис. 1 - Схема тросового способа Периодически, по мере продвижения рабочих перемещений снаряда вперед, производится перекладка тех или иных якорей. Перекладка становых якорей производится тогда, когда длина ݈ଵ сделается меньше некоторого критического значения, при котором якорь теряет свою удерживающую способность. Боковые якоря перекладываются, когда угол ߙ достигает некоторого предельного значения. В отдельных случаях число рабочих тросов, удается уменьшить и работать на пяти или даже четырех тросах. Тросовый способ рабочих перемещений широко применяется при Рис. 2 - Траншейное (а) и веерное (б) добычных и папильонирование: 1 — бровки прорезей; 2 — оси дноуглубительных траншейных ходов работах. На строительных работах и на добыче нерудных материалов применяются траншейная и веерная схемы рабочих перемещений. При траншейной схеме рабочих перемещений грунтозаборное устройство двигается вдоль разрабатываемой прорези (рис. 2,а). После продвижения снаряда на определенную длину вперед он возвращается назад в Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 3 исходное положение, перемещается в сторону, проходит следующую параллельную траншею и т. д. до разработки прорези на полную ширину. При траншейной схеме продвижение снаряда вдоль прорези осуществляется при помощи становой лебедки. Остальные лебедки в количестве от трех до пяти служат для удержания снаряда на оси траншеи, для отвода его назад и для перевода на соседнюю, очередную траншею. Достоинства траншейного способа папильонирования: простота. Недостатки траншейного способа папильонирования: • применим только для работ на легких грунтах, которые могут разрабатываться посредством свободного всасывания, • значительные переборы при выполнении профильных выемок. При веерной схеме рабочих перемещений (рис. 2, б) с помощью передних боковых тросов снаряд поворачивается на заданный угол вокруг неподвижной кормы. По мере разработки грунта землесосный снаряд передним становым тросом передвигается вперед. Достоинства веерной схемы рабочих перемещений: • хорошее покрытие разрабатываемой площади, • достаточно точное соблюдение заданных отметок разработки. Недостатки веерной схемы рабочих перемещений: • относительная сложность управления. Управление землесосным снарядом, работающим с тросовой системой рабочих перемещений, состоит в строго согласованном маневрировании шестью лебедками, что требует длительного обучения и большого практического навыка. Свайно-тросовый способ рабочих перемещении При свайно-тросовом способе рабочих перемещений землесосного снаряда грунтозаборное устройство (рис. 3) при помощи одного из двух рабочих тросов перемещается по дуге окружности, центром которой является одна из кормовых свай, конец которой заглублен в дно выработки. Такая система рабочих перемещений, как правило, применяется на землесосных снарядах, предназначенных для строительных или горных работ. Свайно-тросовые системы рабочих перемещений требуют закладки только двух якорей. Соответственно уменьшается количество рабочих лебедок и упрощается управление землесосным снарядом. Грунтозаборное устройство при этой системе рабочих перемещений описывает совершенно определенные траектории, что особенно необходимо при разработке связных грунтов. Простейший вид свайно-тросовой системы рабочих перемещений показан на рис. 3,а. Повороты снаряда производятся вокруг одной из свай, подвешенных в кормовой части снаряда в направляющих обоймах, причем обоймы, охватывающие сваи, неподвижно прикреплены к корпусу землесосного снаряда. При помощи лебедок сваи могут подниматься и опускаться. Свайное папильонирование заключается в поочередном поворачивании снаряда вокруг одной из свай. Пусть свая Б поднята, а свая А опущена и под влиянием собственной массы концом вошла на некоторую глубину в грунт, образовав Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 4 неподвижную ось вращения. Выбирая трос 1, можно заставить землесосный снаряд поворачиваться вокруг сваи А. Фреза при этом опишет дугу I и снаряд займет положение, изображенное на рисунке пунктиром. Если сваю Б опустить, а сваю А, наоборот, поднять и выбирать трос лебедкой 2, то снаряд, поворачиваясь вокруг оси Б, займет новое положение и фреза опишет дугу II. При повторении таких операций фреза опишет дуги III, IV, V и т. д. Снаряд, как бы шагая на сваях, передвигается вперед, разрабатывая прорезь заданной ширины. Недостатком свайного хода с неподвижными направляющими обоймами является неполное соответствие характера траектории грунтозаборного устройства процессу разработки грунта. На рис. 3, а видно, что по некоторым участкам грунтозаборное устройство проходит дважды (двойная штриховка), в то время как некоторые пропускаются совсем (не заштрихованы). Величина дважды заштрихованных и Рис. 3 - Системы свайно-тросовых рабочих белых участков перемещений: а - сваи в неподвижных обоймах; б - зависит от размеров направляющие одной из свай закреплены в снаряда и расстояния принудительно перемещаемой тележке, рабочий ход на между сваями, напорной свае; в - то же, рабочий ход на прикольной поэтому правильный свае; г - направляющие обоймы в роторе выбор этого расстояния имеет большое практическое значение. Схемы рабочих перемещений с использованием напорного свайного хода показаны на рис. 3. В схеме рис. 3, в напорная свая перемещается вдоль продольной оси снаряда. На схеме сплошными линиями показано первоначальное положение снаряда у правой бровки. Поворачиваясь вокруг сваи 1 по направлению стрелки, фреза разработает грунт на площади ленты I и снаряд займет положение (у левой бровки). Затем при помощи специального напорного механизма снаряд, отталкиваясь от сваи, продвинется вперед на ширину одной ленты и совершит рабочий ход в обратном направлении; фреза при этом Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 5 разработает грунт на полосе II и т. д. Каждая последующая лента хорошо прилегает к предыдущей. Такие ходы могут повторяться до тех пор, пока не будет использована вся возможность передвижения каретки, которая обычно рассчитывается на три — пять ходов, затем снаряд останавливается в среднем положении и сбрасывается прикольная свая. Рабочая свая поднимается, перегоняется в исходное положение и вновь опускается на грунт. Тогда, подняв прикольную сваю, можно продолжать папильонирование. Вторая половина четвертой полосы незначительно перекрывает третью полосу, так как вращение будет происходить вокруг нового центра. Частичное перекрытие получится по тем же причинам на левой половине при пятом ходе. Достоинства системы свайно-тросовых перемещений с напорным свайным ходом: хорошее покрытие разрабатываемой площади. Недостатки системы свайно-тросовых перемещений с напорным свайным ходом: остановки папильонирования, неизбежные во время возвращения рабочей сваи в исходное положение. Свайно-бестросовый способ рабочих перемещений На рис. 4 показана схема бестросового папильонирования с напорной сваей в прорези, параллельной диаметральной плоскости (ДП) корпуса снаряда. Такой способ рабочих перемещений применен на землесосном снаряде для узких прорезей. Рабочие перемещения грунтозаборного устройства 1 осуществляются поворотами его вокруг оси 2 при помощи лебедок 3 и троса 4. Прикольные 5 и напорная 6 сваи при этом опущены 3 грунт. Подача снаряда вперед отталкиванием от Рис. 4 Схема бестросового осуществляется папильонирования с напорной сваей напорной сваи. После хода напорной тележки и опускания свай 5 она возвращается в исходное положение. Нагрузки на земснаряд и оперативные лебедки Расчетная схема нагрузок на земснаряд при определении характеристик лебедок зависит от способа рабочих перемещений земснаряда. При траншейном и папильонажном (без применения свай) способах работы земснаряда она одинакова (рис. 5, а). Схема нагрузок на свайно-якорный земснаряд (рис. 5, б) имеет свои особенности, поскольку рабочее перемещение его не плоскопараллельное, а вращательное. Оно осуществляется при помощи боковых лебедок вокруг заколотой в грунт сваи. Внешние нагрузки на земснаряд, преодолеваемые оперативными лебедками, слагаются из сопротивления воды передвижению корпуса земснаряда Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 6 (Рк или Мк), отвозной шаланды (Рш), рамы грунтозаборного устройства (Рр или Мр) и плавучего грунтопровода (Ргр). Лебедки преодолевают также силу действия ветра на земснаряд, отвозную шаланду и плавучий грунтопровод Рв, гидродинамические инерционные силы Ри и моменты Ми, вызванные изменением скорости передвижения земснаряда; инерционные силы Ри, вызванные изменением количества движения водогрунтовой смеси в плавучем грунтопроводе. Весьма значительные нагрузки передаются на лебедки от работающего механического разрыхлителя или от черпакового устройства Ргд и Рг N. Рис. 5 - Схемы нагрузок на лебедки якорного и свайно-якорного земснарядов Перечисленные нагрузки принято определять в проекциях на оси координат, связанные с направлением передвижения земснаряда, или в виде момента внешних сил сопротивления вращению земснаряда вокруг заколотой в грунт сваи. Результирующую внешнюю нагрузку на оперативные лебедки якорных земснарядов ܴ = ටܴ௫ଶ + ܴ௬ଶ и ее составляющие ܴ௫ и ܴ௬ выбирают в зависимости от принятого способа рабочих перемещений. Нагрузку на лебедки при повышенных скоростях вспомогательных передвижений для всех типов земснарядов рассчитывают, как и для рабочих режимов, но при значениях усилий резания грунта, равных нулю. Сопротивление воды передвижению земснарядов, рабочие перемещения которых являются плоскопараллельными, может быть найдено по формулам: Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). ܲку = с ఘв ଶ ఘв ܶݒܮ௬ଶ ݇м = с ఘв ଶ ఘв ܶ݇ܮм ൫ݒт ߙ݊݅ݏ+ ݒп ൯ ଶ ଶ 7 (1) ܲк௫ = сೣ ܶݒܤ௫ଶ ݇м = сೣ ܶ݇ܤм ൫ݒт ߙ݊݅ݏ+ ݒст ൯ (2) ଶ ଶ где ܲку , ܲк௫ составляющие силы сопротивления воды плоскопараллельному передвижению земснаряда по осям у и х; с , сೣ — коэффициенты сопротивления подводной поверхности борта и носового транца земснаряда при отрывном обтекании; L, В, Т — длина, ширина и осадка корпуса земснаряда; ߩв — плотность воды; км = 1,05…1,1 — коэффициент, учитывающий увеличение сопротивления при работе земснаряда на мелководье; ݒ௬ , ݒ௫ — скорости движения земснаряда относительно воды; ݒт — скорость течения; ݒп — скорость бокового перемещения; ݒст — скорость движения земснаряда по траншее; а — угол между диаметральной плоскостью земснаряда и направлением вектора скорости течения. Для многочерпаковых земснарядов необходимо определить по формуле (2) дополнительное сопротивление воды передвижению пришвартованной шаланды. Для свайно-якорных земснарядов, рабочие перемещения которых осуществляются путем вращения вокруг заколотой в грунт сваи, скорость потока воды по длине корпуса изменяется по значению и направлению. Составляющая этой скорости, нормальная к борту земснаряда в рассматриваемой точке А (см. рис. 5, б) гле ωк — угловая скорость вращения земснаряда вокруг сваи; х — расстояние от сваи до рассматриваемой точки корпуса. Сила воздействия потока воды на борт земснаряда (распределенная нагрузка) Создаваемый ею гидродинамический момент (3) Изложенный метод расчета нагрузок на корпус земснаряда может быть использован и для выбора сопротивления передвижению погруженной в воду Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 8 рамы грунтозаборного устройства. Сопротивление передвижению рамы Рр папильонажных земснарядов может быть определено по формуле (1), в которую вместо Т и В следует подставить соответственно высоту hр и длину lр погруженной в воду части рамы. Для рамы коробчатого сечения коэффициент сопротивления следует принять с =2. Гидродинамический момент, действующий на раму свайно-якорного земснаряда, может быть определен по формуле (3) при соответствующих пределах интегрирования х1 и х2. Инерционные нагрузки на земснаряд возникают при всяком изменении скорости рабочих перемещений. Скорость перемещений земснаряда изменяют для поддержания устойчивого грунтозабора с высокой концентрацией гидросмеси. Она изменяется также вследствие изменения угла заложения канатов боковых лебедок по мере подтягивания снаряда к якорю. Для якорных земснарядов инерционная нагрузка kv - коэффициент присоединенных масс жидкости, определяемый в зависимости от размерений земснаряда с учетом массы жидкости внутри рамы и в прорези корпуса земснаряда; V — водоизмещение земснаряда и шаланды; где — линейное ускорение центра масс земснаряда. При изменении скорости вращения земснаряда вокруг сваи действует момент гидродинамических инерционных сил где — угловое ускорение вращения земснаряда вокруг сваи; kj = 0,10,3 — коэффициент присоединенного момента инерции масс жидкости при Т/В = 0,074-0,15; Jк — момент инерции массы земснаряда и воды, находящейся в прорези корпуса земснаряда, относительно оси заколотой в грунт сваи —момент инерции масс рамы и присоединенных масс жидкости, находящейся между боковыми стенками рамы. Здесь тр — масса рамы и присоединенной жидкости; l0 — расстояние от сваи до оси подвеса рамы; lр — длина рамы. Нагрузка на гибкий плавучий грунтопровод слагается из силы воздействия воды и ветра, а также инерционных сил, обусловленных движением гидросмеси по изогнутому грунтопроводу. Гидродинамическая нагрузка на гибкий плавучий грунтопровод зависит от его длины, формы в плане, размеров и формы понтонов и скорости течения. Наблюдения показывают, что центры шаровых соединений грунтопровода располагаются по кривой, близкой к параболе. В связи с этим проекции силы Ргр Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 9 натяжения грунтопровода в точке его присоединения к земснаряду (см. рис. 143, а) могут быть найдены по формулам где Bгр, Hгр — длина и ширина проекций головной части грунтопровода (рис. 5, а и б); qгр — погонная нагрузка на грунтопровод: где сгр — коэффициент сопротивления формы грунтопровода; Тп — осадка понтонов; vт — скорость течения. Ветровую нагрузку рассчитывают в предположении, что направление ветра противоположно направлению рабочего перемещения земснаряда. Ветровую нагрузку на земснаряд определяют по формуле где рд — давление ветра, принимаемое в зависимости от расчетной силы ветра по шкале Бофорта для судна данного разряда по классификации Правил Регистра; fв — площадь поверхности, воспринимающая ветровую нагрузку. При расчете ветровой нагрузки на плавучий грунтопровод площадь поверхности, воспринимающей ветровую нагрузку, вычисляют как произведение высоты надводной части грунтопровода на длину его проекции, нормальную принятому направлению ветра. Расчет скорости рабочих перемещений земснарядов Скорость рабочих перемещений земснаряда рассчитывают по формуле ܳгр ݒп = ݂ где ܳгр — расчетная производительность земснаряда по грунту, м3/ч; f — площадь поперечного сечения разрабатываемой траншеи или папильонажной ленты, м2. Расчет тягового усилия оперативных лебедок При любом положении земснаряда на прорези внешние силы, действующие на снаряд, уравновешиваются силами натяжения оперативных канатов. Из условия равновесия в соответствии со схемой сил (рис. 5 а) натяжения канатов становой Тст и боковых Тп лебедок могут быть определены по формулам: где R — результирующая внешняя нагрузка на земснаряд; α — угол между становым канатом и осью прорези; β — угол заложения каната боковой лебедки — угол между папильонажным канатом и нормалью к оси прорези; γ — угол Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 10 между направлением результирующей внешней нагрузки R и осью прорези. Максимальное натяжение носового каната наблюдается при условии γ = β, а бокового при γ = 90°-α, когда сила R действует по нормали к боковому канату. При этом натяжение станового и боковых канатов может достигать значения Расчет мощности двигателя оперативной лебедки Необходимая мощность привода лебедок определяется по результатам расчета тягового усилия при соответствующих скоростях рабочих и вспомогательных передвижений земснаряда. Максимальная мощность приводного двигателя оперативной лебедки ܶ௫ ݒк ܰ௫ = ߟ Свайные аппараты Свайные аппараты различают в зависимости от способа подъема и опускания свай, а также крепления их к корпусу земснаряда. Опускать (закалывать сваи) в грунт можно по-разному: свободным падением под действием силы тяжести (рис. 6, а и б); стравливанием каната с барабана лебедки при постоянной скорости (рис. 6,в и 7) или с принудительным погружением свай в грунт под действием натяжения каната (рис. 6, г). Рис. 6 - Способы подъема и погружения свай Конструктивно наиболее простым является так называемый «шагающий свайный аппарат» с неподвижными направляющими обоймами (рис. 7). Он состоит из двух свай 1, вертикально подвешенных на канатах 3 в неподвижных направляющих обоймах. Нижние обоймы 5 укреплены на транце кормы земснаряда, верхние 4 — на ферме (копре) 2. При работе земснаряда сваи попеременно закалываются в грунт. Подъем свай осуществляется с помощью лебедок или гидроцилиндров. Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 11 Рис. 7 - Свайный аппарат со сваями в неподвижных направляющих Рассмотренная схема подъема свай является наиболее простой, однако требует установки высокой фермы (копра) для крепления подъемного блока. Поэтому ее применяют лишь на малых снарядах, оборудованных сваями небольшой длины. При расположении подъемного блока под водой (рис. 6, в) необходимая высота фермы уменьшается, однако при этом усложняется обслуживание блока и устройство становится менее надежным. В приведенных схемах вследствие тормозящего действия стравливаемого с лебедки каната снижается скорость падения и глубина заколки сваи. Поэтому сваи приходится дополнительно утяжелять, например, заливом пустотелой трубы сваи бетоном. На земснарядах, работающих в гидротехническом строительстве, сваи чаше всего поднимают при помощи фрикционных захватов (рис. 6, а). Этот способ надежен в работе и не требует высоких ферм. Фрикционный захват удерживает сваю на канате в любом заданном положении. При наматывании каната на лебедку свая поднимается. При сматывании каната свая, удерживаемая захватом, опускается вначале со скоростью каната. Когда захват сядет на нижнюю направляющую обойму сваи, канат ослабнет. Колодки захвата разомкнутся и свая получит возможность падать с более высокой скоростью под действием силы тяжести. Этим достигается более глубокое погружение сваи в грунт. В свайных устройствах (см. рис. 6, г) заглубление сваи в грунт происходит принудительно за счет силы тяжести и натяжения каната. Такая конструкция позволяет существенно снизить массу сваи и весовую нагрузку на корпус земснаряда. Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 12 Весьма простая конструкция захвата свай тросовой «удавкой» (рис. 6,б) и подъем их при помощи гидроцилиндров предусмотрены на ряде земснарядов голландской постройки. У свайного аппарата напорного хода одна из свай имеет возможность перемещаться относительно корпуса. При переходе земснаряда на очередную папильонажную ленту свая остается в грунте, а земснаряд за счет работы механизма напорного хода отталкивается от нее вперед, перемещая грунтоприемник на очередную папильонажную ленту. Перемещение тележки может осуществляться винтовой парой, канатной лебедкой, цепной передачей или гидроцилиндром. Расчет основных характеристик свайного аппарата Исходным параметром при расчете характеристик свайного аппарата является горизонтальная сила Рс, воспринимаемая сваей. В положении бокового якоря (рис. 8), принятом за расчетное, при определении тяги боковых лебедок свая будет воспринимать, помимо усилия от натяжения каната Тп, всю внешнюю нагрузку R, действующую на земснаряд и присоединенный к нему плавучий грунтопровод. В соответствии со схемой сил По значению силы Rс вычисляют массу и диаметр сваи из условия обеспечения ее неподвижности в грунте. У крупных земснарядов, разрабатывающих грунт на большой глубине, сваи имеют длину до 30 м и массу более 50 т. Громоздким, сложным, дорогим и чрезвычайно мощным при этом оказывается свайный аппарат. Кроме того, значительная масса свайного аппарата, сосредоточенная в корме корпуса снаряда, утяжеляет конструкцию корпуса, снижает его остойчивость и прочность. Масса сваи должна быть минимально необходимой для удержания кормы земснаряда на месте. Длину пера наконечника рекомендуется принимать lн= 1,67dс, где dс - диаметр сваи. Минимальный диаметр сваи: ݀ = 0,17 యඥܴ Рис. 8 - Схема нагрузок на сваю Толщину стенки сваи определяют из условия прочности. Сваю рассчитывают на изгиб, как консольную балку, закрепленную (защемленную) в двух направляющих обоймах. Расчетным принимают сечение сваи по центру нижней направляющей обоймы при максимальной глубине разработки грунта. Сваи крупных земснарядов выполняют с разной толщиной стенки по принципу Лекции по "Основам конструирования машин для подводной добычи ПИ" для ГМ (28 лекционных часов). 13 бруса равного сопротивления изгибу. Так, на крупных американских земснарядах при наружном диаметре 1200 мм толщина стенки изменяется от 62 мм вверху до 37,5 мм внизу, у наконечника. Длина сваи lс зависит от заданной глубины Н0 разработки грунта, являющейся одной из характеристик земснаряда, необходимой глубины погружения наконечника сваи в грунт и расстояния между направляющими обоймами. Сваи для малых и средних земснарядов изготавливают из стальных безшовных труб; для крупных — из отдельных свальцованных листов большой толщины, сваренных встык. Наконечник сваи часто выполни- ют в виде массивной стальной отливки с оперением, что увеличивает удерживающую способность и одновременно облегчает условия погружения сваи в грунт. Определение усилия подъема сваи Усилие Тпс, необходимое для подъема сваи, слагается из силы тяжести сваи Р1 с учетом уменьшения ее в воде, усилия Р2, необходимого для вытаскивания сваи из грунта, и силы трения Р3 сваи в направляющих. Усилие Р1 определяют по формуле Усилие Р2 является суммой силы трения Ртр сваи о грунт и силы присасывания Рпр к грунту. Сила Ртр может быть найдена по формуле при условии х =lн. где aн — периметр поперечного сечения наконечника сваи; ρг, ρв — соответственно плотность мокрого грунта и воды; µ, ρ — соответственно угол внешнего и внутреннего трения грунта. Сила присасывания Рпр, обусловленная разряжением под сваей, заколотой в грунт, действует лишь в момент ее отрыва. Она зависит от пористости грунта и площади присасываемой поверхности наконечника сваи Рпр = fнра, где ра — атмосферное давление. Сила трения сваи в направляющих обоймах где fтр — коэффициент трения между сваей и обоймой; l1— расстояние от наконечника сваи до нижней направляющей обоймы; l2 — расстояние между направляющими обоймами свай. Cилы Р2 и Р3 действуют только в первый момент подъема свай. Как только свая будет оторвана от грунта, сила Р2 исчезнет совсем, а сила Р3 — начнет быстро убывать. Усилие подъема сваи Тп.с = Р1 + Р2 + Р3 является расчетной силой тяги механизма подъема сваи.