Механізм штучного колінного суглоба трансфеморального
advertisement

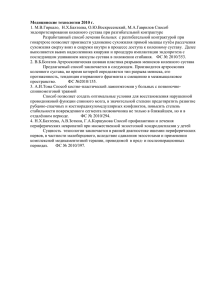
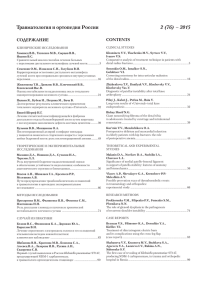
МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 383 УДК 617.58-77 Е.А. Чепенюк, аспирант; А.М. Поляков, канд. техн. наук, доцент Севастопольский национальный технический университет Университетская, 33, г. Севастополь, Украина, 99053 E-mail: apolyakov.mail@gmail.com МЕХАНИЗМ ИСКУССТВЕННОГО ПОЛИЦЕНТРИЧЕСКОГО КОЛЕННОГО СУСТАВА ТРАНСФЕМОРАЛЬНОГО ПРОТЕЗА С ПЕРЕМЕННОЙ ГЕОМЕТРИЕЙ Приведено обоснование конструкции полицентрического механизма искусственного коленного сустава трансфеморального протеза, обеспечивающего различные уровни стабильности в период опорной фазы ходьбы инвалида Ключевые слова: трансфеморальный протез, искусственный коленный сустав, центроида, полицентрический механизм. Современные трансфеморальные протезы в зависимости от конструкций искусственных коленных суставов подразделяют на два класса: одноосевые и полицентрические [1]. Полицентрические, представлявшие собой шарнирные механизмы (четырехзвенные, пятизвенные, шестизвенные и т.д.), имеют более сложную структуру по сравнению с одноосевыми, но отличаются от них некоторыми преимуществами [2]. Чаще всего в практике протезирования используют полицентрические механизмы с четырехзвенной структурой, которые, как показано в [3], могут быть разделены на три вида: гиперстабильные (hyper-stable), стабильные (stable) и с произвольной стабильностью (voluntarily stable). Уровень стабильности сустава определяется по расположению мгновенного центра вращения (ICR) голенного (shin) компонента протеза при движении относительно бедренного (femoral) компонента по отношению к, так называемой, зоне произвольного управления (zone of voluntary control) [3] (рисунок 1). Физически развитые инвалиды, а также те, у которых после ампутации осталась большая часть мускулатуры (т.е. при ампутации бедра ближе к колену), способны к более активному образу жизни. Для них наиболее подходящими являются коленные суставы с произвольной стабильностью, и, наоборот, для пожилых инвалидов, а также для инвалидов с ампутацией ближе к тазобедренному суставу, более комфортные условия обеспечивают стабильные или гиперстабильные коленные суставы [3]. Можно показать, что уровень стабильности трансфеморального протеза с полицентрическим механизмом коленного сустава определяется формой центроиды в относительном движении голенного компонента относительно бедренного в Рисунок 1 – Схемы трансфеморальных протезов опорной фазе ходьбы [2]. Это позволяет с различным уровнем стабильности использовать центроиды определенной формы для синтеза механизмов с требуемой стабильностью при обеспечении параметрических и функциональных ограничений, учитываемых в виде дополнительных условий синтеза. Метод решения таких задач достаточно подробно изложен в [4]. Целью данной работы является обоснование конструкции четырехзвенного полицентрического механизма искусственного коленного сустава с переменной геометрией, позволяющей обеспечивать переменный уровень стабильности трансфеморального протеза. Исследована кинематическая схема шарнирного четырехзвенника (рисунок 2) как геометрическая модель искусственного полицентрического коленного сустава. Вісник СевНТУ: зб. наук. пр. Вип. 137/2013. Серія: Механіка, енергетика, екологія. — Севастополь, 2013. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 384 Обычно, при описании двуногой ходьбы задаются дорожной системой координат Oxz , связанной с неподвижным основанием (землей) и локомоторной – O* x* z* , связанной с подвижным относительно основания центром тазобедренного сустава O* . Предположим, что такие системы координат заданы. В дополнение к ним зададим подвижную систему координат A~ x * ~z * , связанную с шарниром A , которая движется вместе с бедренным компонентом протеза, но ее оси остаются параллельными соответствующим осям дорожной и локомоторной систем координат. Кроме этого с шарниром A свяжем неподвижную относительно бедренного компонента систему координат Aςη , вращающуюся вместе с ним относительно центра тазобедренного сустава. Ось Aς направим вдоль звена AD , а ось Aη – перпендикулярно ей, так, чтобы Aςη была правой ортогональной декартовой Рисунок 2 – Геометрическая модель искусственного системой координат. полицентрического коленного сустава Движение звеньев шарнирного четырехзвенника ABCD будем изучать в системе Aςη , но, при необходимости, координаты, скорости и ускорения характерных точек его звеньев (в том числе и ICR ) могут быть вычислены и в других системах координат, описанных выше. Условимся, что углы поворота звеньев отсчитываются от положительного направления оси Aη и считаются положительными, если они направлены против хода часовой стрелки. Векторное уравнение геометрических связей четырехзвенника AB − AD − DC − CD = 0 представим в виде системы двух нелинейных уравнений l1 sin ϕ1 + l0 − l2 sin ϕ 2 − l3 sin ϕ3 = 0, l1 cos ϕ1 − l2 cos ϕ 2 − l3 cos ϕ3 = 0. (1) Если ввести обозначения A = −2l0l3 sin ϕ3 + l02 + l12 + l32 − l22 , B = −2l1l3 cos ϕ3 , C = −2l1 (l3 sin ϕ3 − l0 ) , − AB − C B 2 + C 2 − A2 − AC + B B 2 + C 2 − A2 , , после чего sin ϕ 2 и cos ϕ = 1 B2 + C 2 B2 + C 2 cos ϕ2 , как функции ϕ3 , определяются из линейных (относительно них) уравнений системы (1) [5]. π Из рисунка 2 следует, что ϕ3 = + β − α + θ S − θ F , где θ F , θ S – углы поворота бедренного и 2 голенного компонентов протеза, соответственно. Таким образом, ϕ1 и ϕ2 являются функциями двух то из (1) получим: sin ϕ1 = переменных θ F и θ S . Центроиды в относительном движении голенного и бедренного компонентов протеза определяются не только кинематическими параметрами механизма коленного сустава, но и особенностями конфигурационного пространства протезированной конечности в целом. После вычислений тригонометрических функций углов ϕ1 и ϕ2 найдены координаты точек A(ξ A , η A ) , B(ξ B ,η B ) , C (ξC , ηC ) и D(ξ D , η D ) в системе Aςη . cos ψ − sin ψ 3 , где ψ = π − α − θ F (рисунок 2). Тогда Матрица поворота R = sin ψ cos ψ 2 * ~ ξ xi = R i , η * ~ i zi ξi – вектор-столбцы координат произвольной точки i в системах координат A~ x * ~z * и Aςη , η i x * , ~z * получим из условия пересечения двух прямых, проходящих соответственно. Координаты ICR ~ ~ x* где ~i* , z i ( ICR ICR ) через точки A, B и C , D , соответственно. Вісник СевНТУ: зб. наук. пр. Вип. 137/2013. Серія: Механіка, енергетика, екологія. — Севастополь, 2013. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 385 Необходимо отметить, что величины кинематических параметров механизма, если его рассматривать как подсистему биомеханической системы – протезированной конечности, оказывают существенное влияние на формы центроид. В качестве примера на рисунке 3 показаны центроиды в движении голенного компонента относительно условно неподвижного бедренного при различных значениях параметра α , характеризующего один из возможных конструктивных вариантов изготовления искусственного коленного сустава. Рисунок 3 – Центроиды в движении голенного компонента протеза относительно бедренного при различных значениях параметра α: θ F = 0 рад ; θ S ∈ − 5π , 5π рад ; значения фиксированных 18 18 кинематических параметров: l0 = 1.0 ед. , l1 = 2.55 ед. , l2 = 2.25 ед. , l3 = 2.25 ед. , β = π рад 2 Рисунок 4 – Центроиды в движении голенного компонента протеза относительно бедренного при различных значениях параметра l3 : θ F = 0 рад ; θ S ∈ − 2π , π рад ; значения фиксированных 9 6 кинематических параметров: l0 = 1.0 ед. , l1 = 2.55 ед. , l2 = 2.25 ед. , α = π рад , β = 4π рад 2 9 Очевидно, что аналогичным образом можно изменять формы центроид путем изменения угла β или других кинематических параметров. Например, предположим, что в конструкции искусственного коленного сустава предусмотрена возможность изменения длины опорного элемента AB голенного компонента при условии постоянства остальных кинематических параметров. Как показано на рисунке 4, это позволяет получать механизмы с Вісник СевНТУ: зб. наук. пр. Вип. 137/2013. Серія: Механіка, енергетика, екологія. — Севастополь, 2013. 386 МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ центроидами, существенно отличающимися по форме при относительно небольших изменениях длины элемента AB . Учитывая, что бедренный компонент протеза в процессе ходьбы инвалида поворачивается относительно тазобедренного сустава, рассмотрим центроиды механизма искусственного коленного сустава в локомоторной системе координат O* x* z* , пренебрегая вертикальными перемещениями центра тазобедренного сустава O* . С этой целью воспользуемся типичными законами изменения углов θ F и θ S , наблюдаемыми в процессе нормальной ходьбы здорового человека [6], которые в графической форме представлены на рисунке 5. Рисунок 5 – Графики изменения углов поворота бедра θ F и голени θ S в течение цикла нормальной ходьбы При синтезе и оценке функциональных характеристик искусственных коленных суставов центроиды в локомоторной системе координат являются наиболее информативными. Они позволяют исследовать расположение ICR по отношению к направлению вектора силы опорной реакции (GRF) в процессе опорной фазы ходьбы. Примем длину бедренного компонента протеза lO* A = l F = 7.0 ед. и построим центроиды в движении голенного компонента протеза относительно бедренного в локомоторной системе координат O* x* z* при различных значениях кинематических параметров полицентрического механизма коленного сустава. Значения углов θ F и θ S зададим при этом в 14 точках опорной фазы (через каждые 5 % цикла ходьбы). Эти центроиды показаны на рисунке 6. Рисунок 6 – Центроиды в движении голенного компонента протеза относительно бедренного в локомоторной системе координат O* x* z* : l0 = 1.0 ед. , l1 = 2.55 ед. , l2 = 2.25 ед. Следует отметить, что относительно небольшие изменения значений кинематических параметров механизма искусственного коленного сустава приводят к существенному изменению форм центроид в относительном движении голенного и бедренного компонентов трансфеморального протеза. Таким образом, можно обоснованно предполагать, что путем оптимизационного кинематического синтеза Вісник СевНТУ: зб. наук. пр. Вип. 137/2013. Серія: Механіка, енергетика, екологія. — Севастополь, 2013. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 387 механизма могут быть определены переменные значения кинематических параметров, позволяющие получать искусственные коленные суставы с различным уровнем стабильности. Разработка искусственных коленных суставов с переменной геометрией и их реализация в виде отдельных конструктивных модулей, позволит существенно увеличить функциональные возможности трансфеморальных протезов в целом. Путем соответствующей настройки кинематических параметров, такой коленный сустав может обеспечивать различные уровни стабильности протеза и использоваться различными группами инвалидов. Кроме этого, инвалиды одной группы будут иметь возможность использовать один конструктивный модуль коленного сустава для обеспечения жизнедеятельности с разным уровнем активности. На основе результатов, полученных в этой работе, будет выполнен синтез кинематических параметров четырехзвенного механизма коленного сустава, способного при соответствующей настройке дискретно обеспечивать три описанных выше уровня стабильности трансфеморального протеза. Библиографический список использованной литературы 1. Michael J.W. Modern Prosthetic Knee Mechanisms / J.W. Michael // Clinical Orthopaedics & Related Research. — 1999. — Vol. 361, № 4. — P. 39–47. 2. Greene M.P. Four-bar-linkage knee analysis / M.P. Green // Prosthetics and Orthotics International. — 1983. — Vol. 34. — P. 15–24. 3. Radcliffe C.W. Four-bar linkage prosthetic knee mechanisms: kinematics, alignment and prescription criteria / C.W. Radcliffe // Prosthetics and Orthotics International. — 1994. — Vol. 18, № 3. — P. 159–173. 4. Чепенюк Е.А. Многокритериальная кинематическая оптимизация четырехзвенного механизма протеза коленного сустава / Е.А. Чепенюк, А.М. Поляков // Вестник СевНТУ. Сер. Механика, энергетика, экология: сб. науч. трудов. — 2012. — Вып. 133. — С. 204–213. 5. Поляков А.М. Альтернативное доказательство теоремы Грасгофа на основе анализа кинематических передаточных функций механизма / А.М. Поляков // Вестник СевНТУ. Сер. Механика, энергетика, экология: сб. науч. трудов. — 2011. — Вып. 119. — С. 5–17. 6. Pasparakis D. Normal Walking Principles, Basic Concepts, Terminology 3-Dimensional Clinical Gait Analysis / D. Pasparakis, N. Darras // EEXOT. — 2009. — Vol. 60, № 4. — P. 183–194. Поступила в редакцию 3.06.2013 г. Чепенюк О.О., Поляков О.М. Механізм штучного колінного суглоба трансфеморального протеза із змінною геометрією Наведено обґрунтування конструкції поліцентричного механізму штучного колінного суглоба трансфеморального протеза, що забезпечує різні рівні стабільності в період опорної фази ходи інваліда. Ключові слова: трансфеморальний протез, штучний колінний суглоб, центроїда, поліцентричний механізм. Chepeniuk O.O, Poliakov O.M. An artificial knee mechanism for transfemoral prosthesis with variable geometry A design of an artificial polycentric knee mechanism for transfemoral prosthesis, which provides different stability levels during amputee walking in stance phase is given. Keywords: transfemoral prosthesis, artificial knee joint, centroid, polycentric mechanism. Вісник СевНТУ: зб. наук. пр. Вип. 137/2013. Серія: Механіка, енергетика, екологія. — Севастополь, 2013.