УДК 618.718.4 А.В. Коваленко, аспирант ОЦЕНКА
advertisement

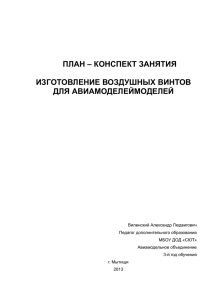
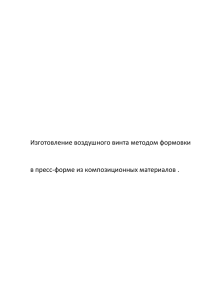
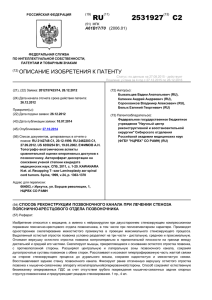
МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 181 УДК 618.718.4 А.В. Коваленко, аспирант Севастопольский национальный технический университет, Лаборатория биомеханики ул. Университетская 33, г. Севастополь, Украина, 99053 E-mail: Sevbiolab@gmail.com ОЦЕНКА НАПРЯЖЁННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ НЕСУЩИХ ЭЛЕМЕНТОВ ТРАНСПЕДИКУЛЯРНЫХ СИСТЕМ При лечении травм и заболеваний позвоночника часто используется транспедикулярная фиксация. Транспедикулярные системы формируются из элементов, которые образуют конструкцию рамного типа, крепящуюся винтами к телам позвонков. Выполнено моделирование работы педикулярного винта и произведена оценка его деформаций с учетом взаимодействия с телами позвонков. Ключевые слова: имплантат, позвоночник, технология, транспедикулярный шуруп. Восстановление спинальных структур и межтеловая стабилизация представляют особый интерес в современной вертебрологии вследствие малой травматичности. Новые технологические методы современной межтеловой стабилизации появились сравнительно недавно и все еще требуют дальнейшего развития с целью обеспечения качества жизни пациентов. Существует множество различных инструментальных систем фиксации позвоночника, среди которых важное место занимают, так называемые, транспедикулярные стержневые системы, особенностью которых является способ крепления винтами. В таких случаях система фиксации крепится к позвонкам наиболее прочно и способна противодействовать значительным внешним нагрузкам [2]. В качестве иллюстрации на рисунке 1 представлены рентгенограммы пациента с инструментальной фиксацией системой «Мост» в двух уровнях. Рисунок 1 – Рентгенограммы больного Н. с инструментальной фиксацией системой «Мост» в двух уровнях (канд. мед. наук А. Брехов, КГМУ им. С.И. Георгиевского) Макет транспедикулярной системы и винты, используемые для ее крепления, даны на рисунке 2 [4]. а) б) в) Рисунок 2 – Изображение элементов транспедикулярной системы: а) макет транспедикулярной системы XIATM STRYKER; б) моноаксиальный винт XIA; в) полиаксиальный винт XIA Простейшая схема замкнутой силовой цепи транспедикулярной системы может быть представлена следующим образом: позвонок-1 – педикулярный винт-1 – балка – педикулярный винт-2 – позвонок-2 – Вісник СевНТУ: зб. наук. пр. Вип. 120/2011. Серія Механіка, енергетика, екологія. — Севастополь, 2011. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 182 межпозвонковый диск (имплантат) – позвонок-1. При этом балка воспринимает около 20 % нагрузки, действующей со стороны тела пациента на позвоночный сегмент, кейдж – около 80 % (рисунок 3) [3]. Позвонок имеет сложную структуру, включающую достаточно твердый наружный (кортикальный) слой и сравнительно мягкий внутренний (спонгиозный) слой. В упрощенной модели их можно считать материалами, характеризующимися разными модулями Юнга и коэффициентами Пуассона. Рисунок 3 – Взаимодействие элементов транспедикулярной системы с позвоночным сегментом Педикулярный винт фиксируется в теле позвонка, взаимодействуя как с наружным, так и с внутренним слоями. Таким образом, его можно представить в виде стержня переменного поперечного сечения на упругом основании, причём основание характеризуется различными коэффициентами подложки. Коэффициенты подложки упругого основания изменяются ступенчато при переходе от одного слоя тела позвонка к другому. Кроме этого, предполагается, что позвонок жестко защемлен (условно неподвижен), а нагрузка к винту передается от балки, будучи равномерно распределенной по длине локального участка на конце винта. В соответствии с описанной выше физической моделью будем считать, что педикулярный винт переменного сечения покоится на упругом основании. С достаточной для данной задачи точностью можно пренебречь депланацией сечений в процессе деформации и трением между винтом и основанием. Реакцию основания следует считать двухсторонней или, имеющей возможность принимать разные знаки. В таком случае дифференциальное уравнение изгиба балки следующее: EJ (x ) d 4 v(x ) = p (x ) − q (x ) , dx 4 (1) где v(x ) – прогиб балки; x – координата сечения, связанная с осью балки; p(x ) – внешняя нагрузка, приложенная к балке; q (x ) – реакция упругого основания; J ( x ) – осевой момент инерции поперечного сечения балки; E – модуль юнга материала балки. Дифференциальное уравнение (1) содержит две неизвестных функции v(x ) и q (x ) . Для их определения к уравнению (1) присоединим дополнительное условие, выражающее зависимость между нагрузкой, приложенной к основанию и его осадкой, а также контактное условие о плотном прилегании балки к основанию. Как показано в [1], дифференциальное уравнение равновесия однослойного основания с двумя коэффициентами подложки k и t , определяющими работу упругого основания на сжатие и сдвиг, имеет вид: − 2t d 2v(x ) dx 2 + kv(x ) = g (x )ψ (0) , (2) где k= Eo δ* 1 − ν o2 h ∫ 0 ψ ' ( y )2 dy ; h t= Eo δ* ψ( y )2 dy , 4(1 + ν o ) ∫0 (3) δ* – условная ширина балки; h – условная толщина упругого основания; Eo , ν o – модуль Юнга и коэффициент Пуассона материала основания, соответственно; ось y перпендикулярна оси x и направлена в сторону упругого основания от оси винта. Для удобства функцию поперечного распределения перемещений ψ ( y ) можно выбрать так, чтобы ψ (0) = 1 . При этом обобщенное перемещение v(x ) будет представлять собой осадку поверхности упругого основания, а уравнение (1) примет вид: Вісник СевНТУ: зб. наук. пр. Вип. 120/2011. Серія: Механіка, енергетика, екологія. — Севастополь, 2011. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ − 2t 183 d 2v ( x ) dx 2 + kv(x ) = g (x ) , (4) где g (x ) = q(x ) – нагрузка на основание. Вследствие того, что прогиб винта совпадает с осадкой поверхности упругого основания, уравнения (1) и (4) могут быть рассмотрены совместно: d 4v(x ) = p( x ) − q(x ) EJ (x ) dx 4 . 2 − 2t d v(x ) + kv(x ) = q( x ) dx 2 (5) Исключая из системы (5) функцию q (x ) , получим основное дифференциальное уравнение задачи, выражающее зависимость между нагрузкой, действующей на винт, и его прогибом: EJ (x ) d 4v (x ) dx 4 − 2t d 2v (x ) dx 2 + kv(x ) = p ( x ) . (6) Функцию поперечного распределения перемещений ψ( y ) в (3) можно в первом приближении считать линейной и принять в виде ψ( y ) = t= h− y , тогда h E0 δ* ; 12(1 + ν 0 ) k= E 0 δ* ( h 1 − ν 02 ). (7) Так как винт представляется в виде усеченного конуса, то условия его сопряжения с основанием будут отличаться от аналогичных условий, свойственных призматической балке. Учитывая, что диаметр винта мало изменяется по длине, а также то, что усилие передаваемое винтом основанию неравномерно распределяется по поверхности, примем приближенно δ* = 0,5d . Оценим изгибные деформации винтов. Точное решение уравнения (6) получить не удается. Более того, учет изменения по длине диаметра винта приводит к значительному усложнению решаемой задачи без существенного повышения точности решения. Поскольку изменение диаметра винта по длине сравнительно невелико, примем среднее значение его диаметра равным 6 мм. Распределенную на локальном участке нагрузку p (x) приведем к началу входа винта в тело позвонка, заменив ее статически эквивалентной системой, в виде главного вектора R и главного момента M . Уравнение (6) запишем в виде d 4v(x ) dx 4 − 2β 2 d 2v(x ) dx 2 + α 4 v( x ) = 0 , (8) πd 4 t k ; J= ; α=4 . 32 4 EJ EJ Так как коэффициенты α и β зависят от свойств наружного и внутреннего слоев позвонка, то уравнение (8) решено в два этапа, на каждом из которых винт представлен как полубесконечная балка, нагруженная на одном конце (вход в тело позвонка) сосредоточенной силой Fext и изгибающим моментом M ext и свободной на другом конце. Такой подход оправдан, так как деформации винта быстро затухают и уже на достаточно малом расстоянии от входа в тело позвонка практически равны нулю. Решения уравнения (8): где: β = v1,2 ( x) = C1,5 e − β2 − −α 4 +β4 x + C 2, 6 e β 2 − −α 4 +β 4 x + C3,7 e − β 2 + − α 4 +β 4 x + C 4 ,8 e β 2 + −α 4 +β 4 x , (9) где C1 , C 2 ,..., C8 – постоянные, определяемые из граничных условий, а α и β – ступенчатые функции вида α = α1[1 − H (x − a )] + α 2 H (x − a ) , β = β1[1 − H ( x − a )] + β2 H ( x − a ) , αi = 4 ki ti E 0i δ* E 0i δ* = , βi = , ki = , t , i = 1,2 ; i EJ 4 EJ 12(1 + ν 0i ) h 1 − ν 02i ( ) H (x ) – обобщенная функция Хевисайда; a – толщина кортикального слоя позвонка. Вісник СевНТУ: зб. наук. пр. Вип. 120/2011. Серія Механіка, енергетика, екологія. — Севастополь, 2011. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 184 Численные значения параметров принятые при решении задачи: – модуль Юнга кортикальной кости: E01 = 1,6 ⋅109 Pa ; – модуль Юнга спонгиозной кости: E02 = 0,9 ⋅109 Pa ; – модуль Юнга материала винта: E = 1,6 ⋅1011 Pa ; – коэффициент Пуассона кортикальной и спонгиозной кости: ν 01 = ν 02 = 0,3 . Параметры h и a приняты равными: h = 0,03m ; a = 0,018m . Граничные условия: 1) x = 0 : EJ d 2 v1 ( x) =M ; dx 2 dv ( x) =0; 4) x = ∞ : 1 dx 2) x = 0 : EJ d 3 v1 ( x) =R; dx 3 5) x = a : v1 ( x) = v2 ( x) ; 3) x = ∞ : v1 ( x) = 0 ; 6) x = a : dv1 ( x) dv2 ( x) = ; dx dx dv2 ( x) =0. dx Окончательно решение уравнения (8) имеет вид: 7) x = ∞ : v2 ( x) = 0 ; 8) x = ∞ : v( x) = v1 ( x)[1 − H ( x − a )] + v( x ) 2 H ( x − a ) . (10) Результаты решения уравнения (10) показывают, что деформации педикулярного винта при действии номинальных нагрузок на позвоночный сегмент относительно малы. Однако напряжения на его поверхности достигают больших величин (в диапазоне от 40 до 70 МПа). Так как винт представляет собой короткий стержень, то существенными являются не только нормальные, но и касательные напряжения. Достаточно большими оказываются и силы давления винта на тело позвонка, что в практических случаях при действии знакопеременных нагрузок может приводить к разрушению тела позвонка. В реальной хирургической практике такие случаи имеют место, особенно при работе винтов в позвонках с патологически измененной структурой. Наибольшая нагрузка со стороны винта воспринимается кортикальным слоем позвонка и существенно увеличивается вместе с увеличением внешнего момента, приложенного к винту. По этому, с точки зрения минимизации возникающих напряжений, наилучшим является расположение головки винта как можно ближе к телу позвонка. Эта задача решена методом конечных элементов в среде CosmosDesignStar. При этом были использованы 3D-модели позвоночного сегмента, фиксированного транспедикулярной системой, представленные на рисунке 4. Нижний позвонок сегмента считался условно неподвижным, а вертикальная нагрузка прикладывалась к верхнему позвонку сегмента. Таким образом, нагружение педикулярного винта осуществлялось со стороны штанги с учетом упругих свойств а) б) Рисунок 4 – Модель позвоночного сегмента, фиксированного межпозвоночного диска, деформирующегося транспедикулярной системой: под нагрузкой. а) 3D модель; б) конечно-элементная модель При проведении исследований материалы считались однородными и изотропными. Физико-механические характеристики материалов, используемых в расчетах, приведены в таблице 1. Таблица 1 – Механические свойства спинальных структур Модуль упругости, Па Коэффициент Пуассона Модуль сдвига, Н/м2 Предел прочности при растяжении, Па Предел прочности при сжатии, Па Кортикальная костная ткань 16 · 109 0.3 5.77 · 109 1 · 108 1.47 · 108 Спонгиозная костная ткань 10 · 109 0.3 3.84 · 108 4 · 106 7 · 106 Межпозвонковый диск 50 · 106 0.4-0.45 19.23 · 106 10 · 106 16 · 106 Вісник СевНТУ: зб. наук. пр. Вип. 120/2011. Серія: Механіка, енергетика, екологія. — Севастополь, 2011. МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ 185 Картины распределения напряжений по поверхностям элементов транспедикулярной системы изображены на рисунке 5. Анализ напряженно-деформированного состояния педикулярного винта позволяет отметить, что максимальные напряжения на его поверхности при действии номинальных нагрузок величиной 1000 – 3000 Н, приложенных к верхнему позвонку, достигают 40...73 МПа. Таким образом, результаты моделирования работы винта двумя различными методами оказываются достаточно близкими, что свидетельствует об адекватности модели. а) б) Рисунок 5 – Иллюстрации распределения напряжений в элементах транспедикулярной системы: а) напряжения в форме Мизеса на поверхности элементов транспедикулярной системы; б) максимальные главные напряжения В то же время следует отметить, что в первом случае (аналитическое моделирование) область наибольших напряжений в винте смещена на небольшую величину в направлении к телу позвонка, а во втором случае (конечно-элементное моделирование) – расположена в переходной зоне винта, в которой диаметр винта изменяется ступенчато. Можно предполагать, что это различие обусловлено концентрацией напряжений в переходной зоне, эффект которой в первом случае не был учтен по объективным причинам. Опыт использования транспедикулярных систем различных конструкций свидетельствует о том, что педикулярные винты разрушаются именно в области близкой к их входу в тела позвонков. Как правило, это усталостные разрушения, обусловленные, недостатками конструкции, низким качеством изготовления, нерациональной установкой винтов, нагрузками, возникающими в процессе жизнедеятельности пациента, превышающими нормативные [3]. Решение поставленной задачи, состоящей в оценке напряженно-деформированного состояния педикулярного винта под действием внешних нагрузок, двумя различными методами позволило получить близкие результаты, позволяющие объяснить причины разрушений винтов и нарушения функциональных свойств транспедикулярных систем в целом. Эти методы могут использоваться для анализа напряженно-деформированного состояния различных конструкций винтов, оценивать влияние новых конструктивных элементов на характер деформаций при создании усовершенствованных конструкций транспедикулярных систем. В лаборатории биомеханики Севастопольского национального технического университета была разработана технология и конструкция новой динамической транспедикулярной системы для лечения заболеваний и травм позвоночника, защищённая патентом Украины на изобретение № 93337 от 25 января 2011 г. Система позволяет обеспечить полное функциональное восстановление оперированного участка позвоночника и может быть установлена на любое необходимое количество уровней. Наличие четырёх степеней подвижности в элементах модулей системы позволяет снизить напряжения, как в элементах самой системы, так и спинальных структурах, что даёт возможность избежать повторных оперативных Рисунок 6 – Внешний вид модулей вмешательств и в конечном итоге существенно повысить динамической транспедикулярной качество жизни пациентов. Элементы модулей разработанной системы в сборе системы изображены на рисунке 6. Вісник СевНТУ: зб. наук. пр. Вип. 120/2011. Серія Механіка, енергетика, екологія. — Севастополь, 2011. 186 МЕХАНІКА, ЕНЕРГЕТИКА, ЕКОЛОГІЯ Динамическая анатомически адаптирующаяся транспедикулярная система предназначена для решения задач обеспечения требуемых параметров подвижности стабилизированного отдела позвоночника с приспособлением системы к росту позвоночника и возможности установки системы на требуемое количество уровней с обеспечением подвижности каждого из них (рисунок 7). Разработанная конструкция динамической транспедикулярной системы позволяет обеспечить требуемые параметры подвижности стабилизированного отдела позвоночника и восстановить естественную архитектонику позвоночника с адаптацией к его изменяющимся свойствам. Возможность установленной динамической транспедикулярной системы адаптироваться к изменению размеров стабилизированных позвоночных сегментов, обусловленных, например, ростом позвоночника у пациентов детского и юношеского возраста. Рисунок 7 – Схема степеней подвижности элементов динамической транспедикулярной По мнению ведущих специалистов в Украине системы ежегодно выполняется около 2500 стабилизирующих операций, что составляет менее 30 % от необходимого количества оперативных вмешательств. Таким образом, социально значимой задачей является создание отечественных стабилизирующих систем, в том числе и динамических, позволяющих снизить риск повторных оперативных вмешательств и тем самым обеспечить качество жизни пациентов [5]. Конструкция нашей динамической транспедикулярной системы продолжает совершенствоваться и дорабатываться с целью её постановки в серийное производство. Библиографический список использованной литературы 1. Власов В.З. Балки, плиты и оболочки на упругом основании / В.З. Власов, Н.Н. Леонтьев. — М.: Гос. изд-во физ.-мат. лит., 1980. — 491 с. 2. Радченко В.А. Практикум по стабилизации грудного и поясничного отделов позвоночника /В.А. Радченко, Н.А. Корж. — Харьков: Прапор, 2004. — 157 с. 3. Малоинвазивные технологии в лечении дегенеративных заболеваний позвоночника – 2007: тезисы докладов 5-ого международного симпозиума, Харьков, 25.05.2007 г. — Харьков, 2007. — 138 с. 4. Каталог медицинского оборудования и изделий медицинского назначения компании Stryker [Электронный ресурс]. — Электрон. текстовые данные (3 307 kbytes). — Режим доступа: http://www.osteoline.ru/index.php?part_name=catalog Четверг, 7 Мая 2009 10:07:47. 5. Тезисы докладов XIV-ого съезда «Ортопедов и травматологов Украины», Одесса, 21– 23 сентября 2006 г. — Одесса, 2006. — 141 с. Поступила в редакцию 6.06.2011 г. Коваленко О.В. Оцінка напружено-деформованого стану несучих елементів транспедикулярних систем При лікуванні травм і захворювань хребта часто використовується транспедикулярна фіксація. Транспедикулярні системи формуються із елементів, які утворюють конструкцію рамного типу, що кріпиться гвинтами до тіл хребців. Виконано моделювання роботи педикулярного гвинта і зроблена оцінка його деформацій з урахуванням взаємодії з тілами хребців. Ключові слова: імплантат, хребет, технологія, транспедикулярній шуруп, напружено деформований стан. Kovalenko A.V. Assessment of the stress-strain state of supporting elements of transpedicular systems When treating injuries and diseases of the spine, transpedicular fixation is often used. The transpedicular system is formed from the elements, which form the frame-type structure and are attached with screws to the vertebral bodies. The modeling of the transpedicular screw and the estimation of its deformations taking into account interaction with bodies of the vertebrae is conducted. Keywords: implant, spine, technology, transpedicular screw, mode of deformation state. Вісник СевНТУ: зб. наук. пр. Вип. 120/2011. Серія: Механіка, енергетика, екологія. — Севастополь, 2011.