Ж.Ж.Ермекбаева Использование однопараметрических
advertisement

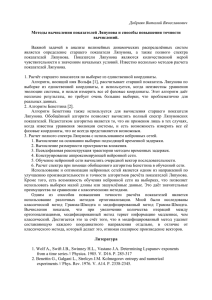
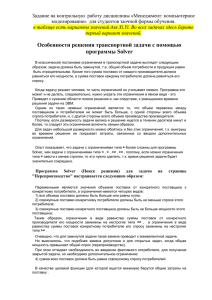
Л.Н. Гумилев атындағы ЕҰУ Хабаршы - Вестник ЕНУ им.Л.Н. Гумилева, 2010, №4 Ж.Ж.Ермекбаева Использование однопараметрических структурно-устойчивых отображений для управления системой хищник-жертва ( Евразийский Национальный университет им. Л.Н. Гумилева, г. Астана ) В работе предложен компенсаторный эффект как управляющий механизм численностью популяции. На примере модели хищник-жертва показана эффективность компенсаторного механизма для стабилизации численности популяции на заданном уровне. Управляющий фактор представлен в виде функции структурно-устойчивого отображения – x3 +k1 x – катастрофа складки. Рассмотрены фазовые портреты и динамика популяции. Построена адаптивная система управления для системы хищник-жертва с насыщением с нелинейным законом управления. В настоящее время проблематично полностью исключить вредное воздействие технологических выбросов на экосистемы, но тогда встает вопрос, нельзя ли применить дополнительное воздействие на экосистему, которое существенно уменьшает вредное воздействие, чтобы сохранить численность популяции. Такое воздействие мы назвали компенсаторным эффектом. Предлагаемый в работе компенсаторный механизм позволит предотвратить появление так называемых неожиданных очагов массового размножения, обоснованно и с максимальным эффектом применять методы и средства защиты, регулирования численности популяций. Система хищник-жертва на примере фитофаг-энтомофаг характеризует парные взаимодействия двух компонент со схожими быстрыми характерными временами. Это позволяет проводить больше лабораторных экспериментов по практическому нахождению компенсаторного эффекта. В данной работе предложена теоретическая возможность нахождение регулирующих компенсаторных воздействия на взаимодействия хищников и жертв. При анализе динамики численности необходимо дать описание общей картины взаимодействия популяций. Это может быть достигнуто при исследовании фазовых портретов на плоскости (x, z), где выявляются характерные точки системы и кривые, разграничивающие различные области и зоны, отражающие качественные варианты динамики популяции. На плоскости (x, z) где x - плотность популяции хищника, а z - плотность популяции жертвы, представляется возможным проанализировать взаимодействие популяции с их естественными врагами. Основная модель имеет вид: dx z = px(1 − βx − ) dt 1 + x2 dz γx2 = cz(−α − z + ), (1) dt 1 + x2 где x(t), z(t) – численности соответственно жертв и хищников в системе в момент времени t; α, β, γ, p, c = const ≥ 0,px- скорость роста популяции жертв; pβx2 - скорость гибели жертв, вызванная действием внутрипопуляционных саморегуляторных механизмов; pxz - скорость уничтожения жертв хищниками при достаточном малом значении x; 1+x2 αcz - скорость естественной смертности хищников; cz 2 - скорость смертности популяции хищников, вызванная действием внутрипопуляционной конкуренции; cγzx2 - скорость прироста хищников. 1+x2 Поведение динамических режимов, поведение главных изоклин на фазовой плоскости изображены на рис. (1) Исследованы качественные свойства системы при заданных параметрах: p = 1, α = 0.39, β = 0.1, γ = 15.538, c = 1 – система имеет следующие стационарные решения: 1 r α (x1 , z1 ) = (0, 0), (x2 , z2 ) = , 0 , (x3 , z3 ) = , 0 , (x4 , z4 ) = (0, 1), β (γ − α) (x5 , z5 ) = (0.32, 1.068), (x6 , z6 ) = (5.9, 14.7), (x7 , z7 ) = (7.15, 14.85). 376 Ж.Ж. Ермекбаева Обозначим их (1-7). При проведении подробного анализа в системе хищник-жертва обнаружены очень интересные закономерности, которые можно наблюдать в любых сложных системах. Структура фазовых траектории исследуемой системы (1) показывает сложное поведение через триггерные режимы, в природе (на примере фитофаг-энтомофаг) они описывают различные вспышки такие как: реверсивные, перманетные, фиксированные и собственно вспышка. Поведение главных изоклин системы (1) и фазовый портрет при коэффициентах p = 1, α = 0.39, β = 0.1, γ = 15.538, c = 1 Попытки регулирования численности вредителей с помощью химикатов приводят к временному улучшению ситуации, или не приносят никакого эффекта. Это связано с тем, что популяции (насекомые) против которых проводится обработка, быстрее адаптируются к ним. Хищники (энтомофаги) напротив, имея интенсивные метаболизм более чувствительны к химикатам, и испытывают на себе пагубное воздействие химической обработки. В результате вредоносность вредителей может возрастать за счет снижения численности хищников. Все это вынуждает искать новые эффективные средства защиты. Человечеству уже известны методы борьбы с инфекциями в виде вакцинации, т.е. усилении иммунитета организма, выработке антител против тех или иных инвазий. По сути, мы имеем дело с компенсирующим воздействием, когда борьба идет не прямо против инвазий, а на усиление реакции организма, на их вредное воздействие. Задача управления биологическими системами имеет два взаимосвязанных аспекта. Первый состоит в изучении динамики систем при постоянных значениях параметров управления. Здесь рассматривают исследование устойчивых стационарных состояний систем, анализ процесса потери устойчивости и рождения автоколебаний, исследование случая крайней неустойчивости - хаотических структур, изучение параметрических границ всех перечисленных режимов. Второй аспект задачи управления состоит в изучении реакции биологических систем на изменения управляющих параметров в процессе ее изменения. Здесь решаются вопросы управляемости биологических систем и проблема разрешимости задач оптимального управления. В данной статье предлагается попытка практического применения выше указанных задач. Николис и Пригожин в своих работах по самоорганизации изучают термодинамику и устойчивость эволюционных процессов, включая анализ пребиотического образования полимера и эволюционную обратную связь, а также обсуждается организация в сообществах насекомых и разделение труда. В работах Арнольда В.И. исследовались математические модели влияния структурно-устойчивого отображения на экологическую модель. В данной работе предлагается решить данную проблему с использованием прикладных результатов теории катастроф, в частности, исследовать динамические свойства системы управ377 Л.Н. Гумилев атындағы ЕҰУ Хабаршы - Вестник ЕНУ им.Л.Н. Гумилева, 2010, №4 ления в классе однопараметрических структурно-устойчивых отображений (катастрофа складки). Под структурной устойчивостью следует понимать независимость качественного поведения сообщества от незначительных вариаций параметров, определяющих динамику этого сообщества. Рассмотрим модель динамики сообщества для оценки механизма управления с применением D-фактора: dxk = xk fk (x1 , . . . , xn ) − πk Dxk , dt где xk (t) – численность k-ой популяции в момент времени t, fk – интенсивность размножения k-ой популяции, N – общее число видов в экосистеме, D – регулирующий фактор, πk – показатель чувствительности k-ой популяции к воздействию фактора D [1],[2]. В исследуемой модели фактор чувствительности возьмем равным единице. В данной работе для управления сложными процессами предлагается два подхода. Первый подход -D-фактор, представленный в виде нелинейной функции, в виде структурно-устойчивого отображения (катастрофа складки). Второй подход - построение имитационной модели управления сложными процессами в экосистемах, с помощью адаптивной системы управления, которая в условиях недетерминированной внешней среды и изменяющихся параметров объекта способна поддерживать и стабилизировать видовое разнообразие и численность на прогнозируемом уровне. Рассмотрим первый подход. Представим управляющийD- фактор в виде функции структурно-устойчивого отображения – x3 + k1 x – катастрофа складки [4]. Свойство теории катастроф - гистерезис проявляется в том, что система обладает четко выраженной замедленной реакцией на некое воздействие, причем эта реакция идет по одному пути, когда воздействие возрастает, и по другому пути, когда оно убывает. Применение складки можно привести следующим образом, если в результате эпидемии численность фитофагов существенно уменьшается и параллельно уменьшается численность энтомофагов, то заболевание постепенно возвращается к эндемическому уровню или как переход, от начала момента вспышки до момента завершения вспышки. Идея состоит в том, что в популяционной среде при воздействии на параметры управления экологической системы влияние D-фактора от желаемого или заданного значения изменяются по закону заданному в форме структурно устойчивых отображений. Динамику численности двух взаимодействующих популяций с применением - фактора можно описать при помощи следующей модели. dx z = px(1 − βx − ) − (x3 + k1 x) dt 1 + x2 dz γx2 = cz(−α − z + ) − (z 3 + k2 z) dt 1 + x2 (2) x3 + k1 x, z 3 + k2 z – управляющие факторы, интегрированные параметры после химикобиологического воздействия. После применения отрицательной обратной связи −x3 популяции через критический момент выходит на устойчивый стационарный уровень. Влияние k Џ является бифуркационной точкой, которое зависит от параметра p. Исследуем основные свойства системы (2) имеет следующие стационарные точки: s 1p 1 cα + k2 p2 β 2 + 4p − 4k1 − pβ, 0 , (x3 , z3 ) = ,0 , (x1 , z1 ) = (0, 0), (x2 , z2 ) = 2 2 cα − cγ + k2 k1 (x4 , z4 ) = 0, 1 − , (x5 , z5 ) = (0.382, 0.820). p 378 Ж.Ж. Ермекбаева Характер фазовых портретов показывает устойчивый узел, т.е. стабильное сосуществование двух популяций не на нулевом уровне и элиминацию различных вспышек, поведение является более предсказуемым и управляемым (см. рис.2). Фазовый портрет системы (2) при параметрах x0 = 0.1; z0 = 0.1; p = 1; c = 1; α = 0.39; β = 0.1; γ = 15.538; k1 = 0.1; k2 = 0.1 Исследуем устойчивость стационарных состояний на основе метода функций Ляпунова[?],[?],[?]. Для этого приводим некоторый формализм позволяющий представить уравнение (2)в отклонениях относительно стационарных состояний. Пусть состояния системы (2) определяется набором в виде вектор столбцаx с компонентами (x1 , x2 , . . . , xn ). Для этого заменим переменные для жертвы x = x1 и для хищника z = x2 . Тогда x: dx = F (XS + x) − F (XS ). dt Данное уравнение необходимо разложить в ряд Тейлора, т.е. правую часть вблизи стационарного состояния. В нашем случае имеет вид полинома по X. Через переменные A заменим коэффициенты полинома: h h p(x2 − 1) i h px i px1 (1 − x21 ) i 1 1 A0 = F (XS ); A1 = p − 2βpx1 − ; A = ; A = 3 2 2 X 2 2 X ; 2 2 X 1 + x S S S (1 + x1 ) (1 + x1 ) 1 A4 = i 4x21 4x21 i 2h px1 − βp ; A = − 3 − ; 5 2 3 (1 + x21 )2 XS XS 1 + x21 1 + x21 (1 + x21 ) h px x 8x1 8x31 i 1 2 1 − A6 = + . 2 XS 1 + x21 (1 + x21 )2 (1 + x21 ) h px x 1 2 3− Через переменные B заменим коэффициенты полинома: B0 = F2 (XS ); B1 = h 2cγx x i h cγx2 i 1 2 1 ; B2 = − 2cx2 − αc ; 2 2 2 1 + x X XS S (1 + x1 ) 1 h cγx (2x2 − 1) i h 2cγx i 2 1 1 ; B4 = ; 3 2 2 2 X S (1 + x1 ) (1 + x1 ) XS h 2cγx x 3x2 − 1 i 1 h 2cγ 4x21 i 1 2 1 B5 = 1− ; B6 = −1 . 2 3 2 2 2 3 (1 + x21 ) 1 + x1 1 + x XS XS (1 + x1 ) 1 B3 = Таким образом, получаем систему в отклонениях от стационарных состояний с законом управления u(t) = −x3 − k1 x1 . F1 (XS + x) = A0 + A1 x1 + A2 x2 + A3 x1 x2 + A4 x21 + A5 x21 x2 + A6 x31 + u1 379 Л.Н. Гумилев атындағы ЕҰУ Хабаршы - Вестник ЕНУ им.Л.Н. Гумилева, 2010, №4 F2 (XS + x) = B0 + B1 x1 + B2 x2 + B3 x21 + B4 x1 x2 + B5 x21 x2 + B6 x31 + u2 (3) В качестве инструмента исследования устойчивости системы (3) используем некоторые специальные функции V (x1 , x2 ), называемые функциями Ляпунова. Как известно, если существует положительно-определенная функция Ляпунова V (x), такая что ее полная производная по времени V 0 (x) = −W (x) вдоль решения дифференциального уравнения состояния системы (3) будет отрицательно-определенной функцией, то состояние равновесия системы асимптотически устойчиво. Построим функцию Ляпунова таким образом, чтобы ее градиент был вектором gradV = − dx , dt (4) противоположным вектору скорости системы (3). Тогда полная производная по времени от функции Ляпунова с учетом уравнения движения (4) будет равна: W (x1 , x2 , . . . , xn ) = dV dx = −gradV . dt dt Таким образом, полная производная по времени от функции Ляпунова W (x1 , x2 , . . . , xn ) ≤ 0. Для устойчивости системы (3) достаточно, чтобы сама функция Ляпунова была знакоположительной. При указанных условиях построения функции Ляпунова и использованные теоремы Морса из теории катастроф [7],[8] гарантирует существование гладкой замены переменных, такой что функция Ляпунова локально может быть представлена квадратичной 2 формой Pn V 2 V = i=1 λi yi , где λi -собственные значения матрицы устойчивости Vij , ||Vij || = ∂x∂i ∂x - гесj сиан функции Ляпунова, вычисленный для состояния равновесия. Так как функция Ляпунова зависит от параметров системы и управления, то гессиан и его собственные значения также зависят от этих параметров. Потребовав выполнение условий λi > 0 можно определить область устойчивости системы. Построим функцию Ляпунова таким образом, чтобы ее градиент был вектором, противоположным вектору скорости системы gradV = dx dt . Выделим компоненты функции Ляпунова. Тогда ∂V1 (x) ∂V1 (x) = −A0 − A1 x1 − A4 x21 − A6 x31 + k1 x1 + x31 ; = −A2 x2 − A3 x1 x2 − A5 x21 x2 ∂x1 ∂x2 Вторая компонента ∂V2 (x) = −B0 − B1 x1 − B3 x21 − B6 x31 ; ∂x2 ∂V2 (x) = −B2 x2 − B4 x1 x2 − B5 x21 x2 + k2 x2 + x32 . ∂x2 Тогда полная производная функции Ляпунова будет иметь вид: h i3 ∂V (x) dx dV = = − A0 + A1 x1 + A2 x1 x2 + A4 x21 + A5 x21 x2 + A6 x21 x2 − k1 x1 − x31 − dt ∂x dt h i3 − B0 + B1 x1 + B2 x2 + B3 x21 + B4 x1 x2 + B5 x21 x2 + B6 x31 − k2 x2 − x32 (5) Потенциальная функция имеет следующий вид: V (x) = −A0 x1 − − A4 x31 A6 x41 A2 x22 A3 x1 x22 A5 x21 x22 k1 x21 x4 A1 x21 − − − − − + + 1 − B0 x1 − 2 3 4 2 2 2 2 4 B1 x21 B3 x31 B6 x41 B2 x22 B4 x1 x22 B5 x21 x22 k2 x22 x4 − − − − − + + 2 2 3 4 2 2 2 2 4 (6) По виду потенциальной функции (6) явно не видна ее положительная определенность. Поэтому можно воспользоваться леммой Морса из теории катастроф. Функция (6) удовлетворяет условиям леммы. Находми гессиан (матрицу устойчивости). ∂ 2 V1 (x) ∂ 2 V1 (x) = k1 + 3x21 − A1 − 2A4 x1 − 3A6 x21 ; = 0; ∂x1 ∂x1 ∂x1 ∂x2 380 Ж.Ж. Ермекбаева ∂ 2 V1 (x) ∂ 2 V1 (x) = −A3 x2 − 2A5 x1 x2 ; = −A2 − A3 x1 − A5 x21 . ∂x2 ∂x1 ∂x2 ∂x2 И для второй компоненты функции Ляпунова ∂ 2 V2 (x) ∂ 2 V2 (x) = −B1 − 2B3 x1 − 3B6 x21 ; = −B4 x2 − 2B5 x1 x2 ; ∂x1 ∂x1 ∂x2 ∂x1 ∂ 2 V2 (x) = k2 − B2 − B4 x1 − B5 x21 + 3x22 ; ∂x2 ∂x2 Функция Ляпунова по лемме Морса представляется в виде квадратичной формы: V (x) = (A1 + 2A4 x + 3A6 x2 − k1 − 3x2 + B1 + 2B3 x + 3B6 x2 )x2 + +(A2 + A3 x + A5 x2 + B2 + B4 x + B5 x2 − k2 − 3z 2 )z 2 (7) Положительная определенность функции Ляпунова, приведенной к каноническому виду (7), определяется условиями: (A1 + 2A4 x + 3A6 x2 − k1 − 3x2 + B1 + 2B3 x + 3B6 x2 ) > 0 (A2 + A3 x + A5 x2 + B2 + B4 x + B5 x2 − k2 − 3z 2 ) > 0 (8) Таким образом, при выполнении определенных условий по центральной теореме Морса функция Ляпунова и ее полная производная могут быть локально приведены к канонической форме диагонального вида путем гладкой замены переменных. Коэффициенты канонических форм (8) определяют область робастной устойчивости системы управления. Сделаем некоторые допущения: перепишем выражение для A1 в другом виде, как p − A1 . Если предположить, ∼ ∼ что x1 = x1 и x2 = x2 , то после объединения схожих компонентов из системы получим XS XS выражения для k1 и k2 V (x) = px2 + (k1 + 3x21 − A1 − 2A4 x1 − 3A6 x21 − B1 − 2B3 x1 − 3A6 x21 )x21 + +(k2 + 3x22 − B2 − B4 x1 − B5 x21 − A2 − A3 x1 − A5 x21 )x22 (9) Пренебрегая другими значениями функции, т.е. обнуляя, мы получим выражения для управляющих параметров: k1 = p − (A1 + B1 ) + 3(A0 + B6 − 1) + 2x1 (A4 + B3 ; ) k2 = 2x1 A3 + B4 + 3x21 (A5 + B5 ) + (A2 + B2 ) − 3x22 ; k1 , k2 > 0 (10) Достаточным условием положительной определенности кандидата на функцию Ляпунова для системы (9), является условие: p > 0, p ≤ k1 . В качестве второго подхода управления сложными процессами популяционных моделей рассмотрим имитационное моделирование экологической системы. Суть имитационного моделирования заключается в исследовании сложной математической модели с помощью вычислительных экспериментов и обработки результатов этих экспериментов. Благодаря возможности проигрывать различные “сценарии” поведения и управления имитационная модель может быть успешно использована для выбора оптимальной стратегии эксплуатации природой или оптимального способа создания искусственной экосистемы. При создании имитационной модели можно позволить себе более высокую степень подробности при выборе переменных и параметров модели. С помощью программного комплекса Matlab R2006a, Simulink смоделированы адаптивные системы управления для системы хищник-жертва с линейным законом управления, и в качестве механизма адаптации используются условия из (10). 381 Л.Н. Гумилев атындағы ЕҰУ Хабаршы - Вестник ЕНУ им.Л.Н. Гумилева, 2010, №4 С помощью обратной связи модель хищник-жертва адаптируется, приспосабливается, перенастраивается к условиям D-фактора. Адаптивной считают систему, которая может приспосабливаться к изменениям внутренних и внешних условий [9]. Такие системы управления сохраняют работоспособность при непредвиденных изменениях свойств модели популяции, D-фактора (законов управления) или окружающей среды путем смены алгоритма своего функционирования, программы поведения или поиска оптимальных состояний. Для адаптивной системы управления для модели механизмы адаптации строятся с помощью A0 , . . . , A6 ; B0 , . . . , B5 и управляющих параметров k1 , k2 из (10). Структурную схему системы управления можно представить следующим образом, представленную на рис.3. Система управления С помощью программного комплекса Matlab R2006a, Simulink смоделированы адаптивные системы управления (см. рис.3). Существуют адаптивные системы управления с эталонной моделью. В таких моделях основное целевое условие – это обеспечение сходимости к нулю ошибки слежения e(t) = x(t) − xm (t) → 0 при t → 0. Где x(t)- настраиваемая модель (исходная модель популяции со сложным поведением), xm (t) - эталонная модель (желательное стабильное поведение популяций). Задача состоит в нахождении таких параметров управления, при котором сложное поведение можно свести к прогнозируемому. С применением этого подхода предлагаем возможность применения подхода управлением сложным поведением популяционной модели с помощью имитационного моделирования. Смоделированная адаптивная система управления дает показательные результаты управляемости и адаптивности. Таким образом, компенсаторный эффект в построенной нами адаптивной системе управления в системе хищник-жертва позволяет сохранять численность популяций на заданном уровне. Выводы В работе предложен компенсаторный механизм управления в виде однопараметрического структурно-устойчивого отображения - катастрофа складки x3 + k1 x, - которое показало, что появляется возможность стабилизации численности популяций на заданном уровне. Данный механизм позволяет, манипулируя коэффициентами, рассмотреть воздействие как на одну популяцию (возможно антропогенное воздействие), так и на обе (нейтрализация вредного воздействия). Доказана устойчивость системы хищник-жертва с управлением (8) методом функции Ляпунова. Показана теоретическая возможность существования управляющего механизма компенсаторного воздействия, что позволит целенаправленно вести поиск нейтрализующих реагентов экспериментально для управления численностью популяций в экосистемах. Данное направление дает потенциальную возможность совместного исследования теоретического подхода с натурными экспериментами. В рамках общей модели хищник-жертва открывается возможность количественной оценки взаимодействия популяций, которая может быть использована 382 Ж.Ж. Ермекбаева для прогнозирования динамики численности и управления вспышками массовых размноженийэпидемий. В конкретной экологической обстановке это соответствует степени реальной вредоносности вида и определяет целесообразность проведения защитных мероприятий. СПИСОК ЛИТЕРАТУРЫ 1. Омаров А.Н., Недорезов Л.В., Абросов Н.С. Метод сравнения устойчивости видового разнообразия проточных систем. Красноярск: Препринт є80Б, 1988.-C. 32. 2. Omarov A.N. The kinetic approach to a problem of variety and stability ecosystem. International Conference M34 "Mathematical Modeling of Ecologycal Systems.- Dairk-Press, 2003.- p. 35 3. Бейсенби М.А. Модели, методы анализа и синтеза предельно устойчивых систем управления. Автореф. дис. док. Алматы.1998.- C. 46. 4. Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Качественная теория динамических систем второго порядка. Москва: Наука, 1966.- C. 568. 5. Баутин Н. Н., Леонтович Е. А. Методы и приемы качественного исследования динамических систем на плоскости. Москва: Наука, 1976.- C.488. 6. Ляпунов А.М. Общая задача об устойчивости движения. Москва.: Изд-во АН СССР, 1948.C.473 7. Арнольд В.И. Теория катастроф. Москва: Наука, 1990.-C.128 8. Постон Т., Стюарт И., Теория катастроф и ее приложения. Москва: Мир, 1980.- 600с. 9. Фрадков А.Л. Адаптивное управление в сложных системах. Москва: Наука, 1990.- 296с. Ермекбаева Ж.Ж. Жемтiк-жыртқыш жүйесiн басқару үшiн бiр параметрлiк құрылымдық-орнықты бейнелеу сыныбын қолдану Бұл жұмыста популяцияның көлемiн басқару механизмi ретiнде компенсаторлық тәсiл қарастырлған. Басқару заңы бiр параметрлiк құрылымдық-орнықты бейнелеу сыныбында x3 + k1 x(бүгiлiс күйреуi үлгiсiнде) берiлген. Жүйенiң фазалық бейнелерi мен популяцияның динамикасы келтiрiлген. Жемтiк-жыртқыш жүйесi үшiн адаптивтi басқару жүйесi құрастырылған. Yermekbayeva J.J. Use of single parameter structurally stable maps for the predator-prey system regulation A “compensator effect” as the population regulation mechanism is presented. On the basis of predator-prey model the efficiency of the compensator mechanism as regards the stabilization of the population at a fixed level is shown. The operating factor is given in the form of structurally stable map – x3 + k1 x – fold catastrophe. Phase portraits and dynamics of the population are considered. An adaptive management system for nonlinear predator-prey system with saturation is constructed. Поступила в редакцию 12.04.10 Рекомендована к печати 25.05.10 383