НАДЕЖНОСТЬ и ДИАГНОСТИКА
advertisement

В.М. Гуменюк
НАДЕЖНОСТЬ
и
ДИАГНОСТИКА
ЭЛЕКТРОТЕХНИЧЕСКИХ
СИСТЕМ
В.М. Гуменюк
НАДЕЖНОСТЬ
И ДИАГНОСТИКА
ЭЛЕКТРОТЕХНИЧЕСКИХ
СИСТЕМ
Рекомендовано Министерством
общего и профессионального
образования Российской
Федерации в качестве учебного
пособия для студентов высших
технических учебных заведений
Владивосток
2010
Г 945
УДК 621.311.019.3
Гуменюк В.М. Надежность и диагностика электротехнических
систем: Учеб. пособие для вузов. — Владивосток: Изд-во Дальневост.
гос. техн. ун-та, 2010. - 218с. : ил.
ISBN 5-7596-0051-6
В учебном пособии дано систематизированное изложение основ теории надежности и
технической диагностики. Раскрыты основные понятия, определения и критерии,
используемые при исследовании, проектировании и эксплуатации электротехнических
систем, методы расчета надежности и организации диагностирования. Рассмотрены
принципы планирования и обработки результатов испытаний на надежность. Особое
внимание уделено вопросам контроля работоспособности, поиска дефектов и
обеспечения эксплуатационной надежности электротехнических систем. Впервые
приведены результаты исследований по организации диагностирования изоляции
судового электрооборудования.
Учебное пособие предназначено для студентов вузов, обучающихся по направлению
5513 — «Электротехника, электромеханика и электротехнология» и специальности
1809 — «Электрооборудование и автоматика судов». Оно может быть полезно
специалистам в области проектирования, монтажа, ремонта и эксплуатации
электрооборудования и электротехнических систем.
Издано по решению Редакционно-издательского совета ДВГТУ.
Научный редактор — Заслуженный энергетик РФ, действ. чл.
Академии транспорта, д-р техн. наук, проф. Г.Е.Кувшинов.
Рецензенты: кафедра «Электрооборудование судов» Дальневост. гос.
морск. акад. (зав. каф. чл.-кор. Академии транспорта, д-р техн. наук,
проф. В.Ф.Веревкин), действ. чл. Академии электротехнических наук,
д-р техн. наук, проф. Н.В.Киншт
ISBN 5-7596-0051-6
© Изд-во ДВГТУ, 2010
© В.М. Гуменюк, 2010
Оглавление
Оглавление
ВВЕДЕНИЕ ............................................................................................... 7
Глава 1. ...................................................................................................... 9
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ
НАДЕЖНОСТИ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ...................... 9
§ 1.1. Система и ее элементы ............................................................... 9
§ 1.2. Состояния и события перехода ............................................... 10
§ 1.3. Надежность и эффективность ................................................ 13
Глава 2. .................................................................................................... 16
ОБЩИЕ СВЕДЕНИЯ О ВЕРОЯТНОСТНЫХ ПРОЦЕССАХ ........... 16
§ 2.1. Случайные события и их потоки ............................................. 16
§ 2.2. Случайные величины ............................................................... 18
§ 2.3. Характеристики положения случайной величины ................. 22
§ 2.4. Законы распределения случайных величин ............................ 23
§ 2.5. Понятие и характеристики случайных процессов.................. 28
§ 2.6. Марковские случайные процессы ........................................... 31
Глава 3. .................................................................................................... 34
ПОКАЗАТЕЛИ НАДЕЖНОСТИ .......................................................... 34
§ 3.1. Показатели безотказности невосстанавливаемых объектов .. 35
§ 3.2. Показатели безотказности восстанавливаемых объектов ..... 39
§ 3.3. Показатели долговечности и сохраняемости.......................... 41
§ 3.4. Показатели ремонтопригодности и контролепригодности ... 42
§ 3.5. Комплексные показатели надежности .................................... 45
Глава 4. .................................................................................................... 47
ОСНОВЫ РАСЧЕТА НАДЕЖНОСТИ ............................................... 47
§ 4.1. Общие положения ................................................................... 47
§ 4.2. Расчет показателей безотказности при основном
соединении элементов без резервирования и восстановления ...... 49
§ 4.3. Методы оценки показателей ремонтопригодности
нерезервированных объектов ........................................................... 55
Глава 5. .................................................................................................... 58
РАСЧЕТ НАДЕЖНОСТИ С УЧЕТОМ РЕЗЕРВИРОВАНИЯ .......... 58
§ 5.1. Понятие и виды резервирования .......................................... 58
§ 5.2. Постоянное структурное резервирование без восстановления
............................................................................................................. 61
§ 5.3. Включение резерва замещением ............................................. 64
§ 5.4. Скользящее резервирование .................................................... 66
§ 5.5. Комбинированный резерв ....................................................... 69
§ 5.6. Структурное резервирование с восстановлением .................. 72
§ 5.7. Расчет надежности с использованием методов теории
графов .................................................................................................. 79
§ 5.8. Принципы расчета структурно-сложных систем ................... 81
Глава 6. .................................................................................................... 85
ИСПЫТАНИЯ НА НАДЕЖНОСТЬ .................................................... 85
§ 6.1. Значение и виды испытаний на надежность ........................... 85
§ 6.2 Определение вида закона распределения ................................ 89
§ 6.3. Точечные оценки показателей надежности по результатам
определительных испытаний ............................................................. 91
§ 6.4. Интервальные оценки показателей надежности при
нормальном законе распределения отказов ...................................... 95
§ 6.5. Интервальные оценки при экспоненциальном распределении
........................................................................................................... 102
§ 6.6. Контрольные испытания на надежность ............................... 104
Глава 7. .................................................................................................. 108
ПРИНЦИПЫ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ .............. 108
§ 7.1. Основные положения ............................................................. 108
§ 7.2. Методология технической диагностики ............................... 112
§ 7.3. Тестовые сигналы ................................................................... 114
Глава 8. .................................................................................................. 118
КОНТРОЛЬ РАБОТОСПОСОБНОСТИ ............................................. 118
§ 8.1. Условия работоспособности .................................................. 118
§ 8.2. Методы контроля работоспособности объектов непрерывного
действия ............................................................................................ 121
§ 8.3. Особенности контроля работоспособности объектов
дискретного действия ...................................................................... 123
Глава 9. .................................................................................................. 126
ПОИСК ДЕФЕКТОВ ............................................................................ 126
§ 9.1. Основные методы и критерии ............................................ 126
§ 9.2. Принципы реализации комбинационных методов поиска
дефектов ............................................................................................ 129
§ 9.3. Метод последовательных групповых проверок на базе
информационного алгоритма ......................................................... 131
§ 9.4. Методы последовательных групповых проверок на базе
экономических и информационно-экономических алгоритмов 135
§ 9.5. Расчет значений вероятностей возможных состояний объекта
........................................................................................................... 137
4
§ 9.6. Особенности поиска дефектов в объектах дискретного
действия ............................................................................................ 139
Глава 10. ................................................................................................ 140
ПРОГНОЗИРОВАНИЕ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ............... 140
§ 10.1. Основные понятия о техническом прогнозировании...... 140
§ 10.2. Детерминированное прогнозирование ............................... 142
§ 10.3. Вероятностное прогнозирование......................................... 148
Глава 11. ................................................................................................ 151
ПРИНЦИПЫ РАЗРАБОТКИ ДИАГНОСТИЧЕСКОГО
ОБЕСПЕЧЕНИЯ ................................................................................... 151
§ 11.1. Содержание диагностического обеспечения .................... 151
§ 11.2. Непрерывные аналитические модели ............................... 154
§ 11.3. Дискретные диагностические модели ................................. 158
§ 11.4. Выбор диагностических параметров ................................. 163
§ 11.5. Оценка значимости диагностических параметров ............. 167
Глава 12. ................................................................................................ 171
ЭФФЕКТИВНОСТЬ СИСТЕМ ДИАГНОСТИРОВАНИЯ ................. 171
§ 12.1. Понятие и показатели эффективности диагностирования 171
§ 12.2. Определение вероятности правильной оценки состояния
объекта .............................................................................................. 173
§ 12.3. Принципы учета влияния показателей системы
диагностирования на показатели надежности объекта .............. 177
Глава 13. ................................................................................................ 181
ЭКСПЛУАТАЦИОННАЯ НАДЕЖНОСТЬ
ЭЛЕКТРОТЕХНИЧЕСКИХ СИСТЕМ ............................................... 181
§ 13.1. Общие положения по обслуживанию и ремонту
электротехнических систем ............................................................ 181
§ 13.2. Показатели эффективности технического обслуживания 184
§ 13.3. Планирование технического обслуживания и расчет ЗИП
........................................................................................................... 186
§ 13.4. Организация технического обслуживания судового
электрооборудования ....................................................................... 187
Глава 14. ................................................................................................ 189
ДИАГНОСТИРОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ИЗОЛЯЦИИ ............ 189
§ 14.1. Особенности диагностирования электрической изоляции
........................................................................................................... 189
§ 14.2. Методы оценки состояния электрической изоляции ...... 192
§ 14.3. Абсорбционный метод диагностирования изоляции ...... 196
§ 14.4. Сравнительный анализ эффективности диагностических
параметров изоляции ...................................................................... 202
5
ПРИЛОЖЕНИЕ 1 ................................................................................. 206
СПРАВОЧНЫЕ ТАБЛИЦЫ ............................................................ 206
ПРИЛОЖЕНИЕ 2 ................................................................................. 210
ПРИМЕР РАЗРАБОТКИ ПРОГРАММЫ ПОИСКА ДЕФЕКТОВ
МЕТОДОМ ПОСЛЕДОВАТЕЛЬНО-ГРУППОВЫХ ПРОВЕРОК НА
БАЗЕ ИНФОРМАЦИОННОГО АЛГОРИТМА .............................. 210
СПИСОК ЛИТЕРАТУРЫ .................................................................... 216
6
ВВЕДЕНИЕ
Важнейшей задачей развития экономики является постоянное
повышение качества выпускаемой продукции и эффективности ее
использования. Качество продукции технического назначения и
эффективность ее использования во многом определяются уровнем ее
надежности, т.е. способностью выполнять заданные функции в
расчетных
условиях
эксплуатации
в
течение
достаточно
продолжительного периода времени.
Требуемый уровень надежности закладывается на стадии
проектирования и обеспечивается в процессе изготовления, монтажа
и технического обслуживания. До недавнего времени эта задача
решалась в основном путем введения завышенных коэффициентов
запаса с целью облегчения режимов работы отдельных элементов и
узлов, а также их постоянным резервированием.
Создание сложных технических устройств и комплексов,
особенно в составе подвижных объектов, таких как самолеты, суда,
ракеты и т.п., выдвинуло на первый план требование существенного
уменьшения их габаритов и массы при одновременном повышении
уровня показателей надежности, что диктовалось не только
экономическими ограничениями, но и необходимостью обеспечения
максимальной безопасности эксплуатации.
Для комплексного решения возникших при этом проблем
потребовалась разработка основ нового научного направления —
теории надежности. Предмет ее исследований — изучение причин и
закономерностей отказов объектов, разработка способов комплексной
оценки надежности, методы анализа и расчета надежности элементов
и систем, их испытаний и организации обслуживания.
Наука о надежности развивается в тесном взаимодействии с
другими научными дисциплинами, такими как теория вероятностей,
математическая статистика, теория вероятностных процессов,
техническая
диагностика,
теория
информации,
технология
производства и др. Эти дисциплины не только служат основой для
методического совершенствования теории надежности, но и
обеспечивают дополнительные возможности повышения уровня
надежности и эффективности использования технических объектов.
7
К числу таких дисциплин в первую очередь следует отнести
техническую диагностику, предметом которой является исследование
технических состояний объектов, установление причин и видов
отказов, разработка методов и принципов построения систем
технического
диагностирования.
Использование
положений
технической диагностики обеспечивает существенное повышение
эксплуатационной надежности технических систем.
Основные направления в развитии теории надежности и
технической диагностики заключаются в совершенствовании
математических методов анализа и расчетов, в развитии методов
испытаний, сбора и обработки статистических данных о надежности
объектов различного назначения, в разработке новых методов и
способов
повышения
надежности
продукции
технического
назначения.
Основополагающими работами в области теории надежности
стали труды А.И.Берга, Н.Г.Бруевича, А.М.Половко. Математические
основы теории надежности получили свое развитие в трудах
Б.В.Гнеденко, Ю.К.Беляева, А.Д.Соловьева. Физические основы
теории надежности разработаны Б.С.Сотсковым. Большой вклад в
развитие технической диагностики внесли П.П.Пархоменко,
А.В.Мозга-левский, Н.В.Киншт, В.П. Чипулис. Из зарубежных
ученых, способствовавших развитию теории надежности и
технической диагностики, следует прежде всего назвать Д.Неймана,
А.Пирса, К.Барлоу, Е.Моека.
К настоящему времени в Москве, Санкт-Петербурге,
Новосибирске и Владивостоке сформированы научные школы,
разрабатывающие различные направления теории и практики
надежности и технической диагностики.
Автор выражает глубокую благодарность научному редактору
доктору техн. наук, проф. Г.Е.Кувшинову, рецензентам доктору техн.
наук, проф. Н.В.Киншту и доктору техн. наук, проф. В.Ф.Веревкину
за ценные замечания и рекомендации, позволившие улучшить книгу,
а также всем специалистам, участвовавшим в обсуждении рукописи.
Замечания и пожелания по книге просьба направлять по адресу:
690600, Владивосток, ул. Пушкинская, 10, издательство ДВГТУ.
8
Глава 1.
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ
НАДЕЖНОСТИ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
§ 1.1. Система и ее элементы
Одним из основных понятий в теории надежности и
технической диагностике является понятие системы. Термин
«система» имеет широкий диапазон значений и в общем случае
определяет ограниченное множество элементов, понятий, норм,
условий с отношениями и связями между ними, образующих
некоторую целостность.
В технике под системой понимается совокупность объектов,
предназначенных для выполнения заданных функций в результате
совместных действий. Объекты, образующие систему, представляют
собой элементы системы.
Разбивка системы на элементы производится в зависимости от
уровня исследования таким образом, чтобы каждый элемент
выполнял определенные частные функции и имел самостоятельные
характеристики надежности, информативности или состояния,
используемые при расчетах. Элементы системы, представляющие
собой технические устройства, их блоки, узлы, детали, при
рассмотрении
конкретных
задач
могут
обозначаться
как
функциональные элементы или структурные единицы. Элементы,
которые невозможно или нецелесообразно разбивать на составные
части, называются первичными. Характеристики их надежности,
установленные
по
результатам
испытаний
или
опытной
эксплуатации, приводятся в справочной литературе и нормативнотехнической документации.
В состав системы в качестве ее элементов могут входить и
нетехнические средства, такие, например, как программное и
информационное обеспечение, человек-оператор и т.п. Системы
различаются по составу и степени сложности в зависимости от вида и
количества составляющих элементов, характера связей между ними и
числа возможных перестроений структуры. Системы, имеющие в
своем составе электрические и электромеханические элементы и
устройства, называются электротехническими.
Применительно к конкретным условиям и уровню решаемых
задач исследования и расчеты могут проводится для всей системы в
9
целом, для ее частей (подсистем) или для элементов, которые при
необходимости могут рассматриваться как отдельные системы,
состоящие из элементов более низкого уровня, в том числе и
первичных. В соответствии с этим часто используется более общее
понятие — объект исследования, или просто объект, под которым
понимается предмет проводимого исследования. Это может быть и
система, и ее часть, и элемент или любое другое техническое
устройство.
Системы и их элементы (в общем случае — объекты
исследования)
подразделяются
на
восстанавливаемые,
т.е.
ремонтируемые без вывода из эксплуатации, и невосстанавливаемые.
В качестве восстановительной операции может производиться замена
отдельных частей или всего объекта в целом.
Решение многих задач надежности и технической диагностики
связано с анализом процессов изменения свойств объекта. Обычно,
особенно на стадии проектирования, необходимые для этого
исследования проводят на базе диагностической модели. Под
диагностической моделью объекта или процесса понимается его
формальное описание с помощью табличных, математических,
графических или иных представлений, позволяющее в определенных
пределах имитировать изменение свойств и характеристик
надежности реального объекта.
§ 1.2. Состояния и события перехода
Под состоянием, или техническим состоянием объекта
понимается совокупность его свойств, характеризуемых признаками,
установленными технической (конструкторской и нормативнотехнической) документацией для определенных условий и режимов
использования объекта.
В число таких признаков могут входить как числовые и иные
характеристики, определяющие свойства объекта, подверженные
изменению в процессе эксплуатации, хранения, транспортирования
или ремонта, так и характеристики, определяющие свойства объекта,
изменение которых в расчетных условиях использования невозможны
(или возможны в незначительных пределах). В качестве примера
последних, присущих техническим объектам, можно привести такие
признаки, как массогабаритные показатели, марки материала, типы
10
комплектующих изделий, параметры первичных элементов, способы
установки и крепления и т.п.
Ограничительные значения признаков, характеризующих все
названные свойства объекта или пределы их допустимых при
нормальной эксплуатации изменений, приводятся в технической
документации на объект, составляющие его изделия или классы
соответствующих изделий и носят название технических требований.
Технические требования обычно приводят в таких документах, как
чертежи, схемы, спецификации, программы испытаний, инструкции
по обслуживанию, технические условия на поставку, стандарты и др.
Иногда для характеристики состояния объекта вместо термина
«признак» используют термин «показатель». Однако он имеет более
ограниченное применение и фактически представляет собой признак,
выраженный в числовом или функциональном виде.
Свойства объекта после его изготовления непрерывно
изменяются под действием различного рода факторов, таких,
например, как воздействия внешней среды, внутренние воздействия,
определяемые
характером
и
режимом
функционирования,
деградационные процессы старения и изнашивания и т.п.
Степень влияния основных факторов на изменение свойств
объекта устанавливают на стадиях его проектирования и испытания
опытных образцов. При этом определяют минимальное необходимое
количество признаков, контроль которых обеспечивает достоверную
оценку наиболее характерных возможных изменений свойств
объекта. Такие признаки называются диагностическими признаками,
или диагностическими параметрами. Они приводятся в технической
документации на объект и используются для контроля его состояния.
Совокупности
различных
технических
состояний,
удовлетворяющих
или
не удовлетворяющих определенным
требованиям, образуют виды состояний. Применительно к задачам
надежности и технической диагностики рассматривают следующие
виды состояний:
1) исправное состояние (исправность) — состояние объекта,
при котором он удовлетворяет всем техническим требованиям;
2) неисправное состояние (неисправность) — состояние
объекта, при котором он не удовлетворяет хотя бы одному
техническому требованию;
3) работоспособное состояние — состояние объекта, при
котором он удовлетворяет всем техническим требованиям,
характеризующим его способность выполнять заданные функции;
11
4) неработоспособное состояние — состояние объекта, при
котором он не удовлетворяет хотя бы одному техническому
требованию из числа характеризующих его способность выполнять
заданные функции;
5) предельное состояние — состояние объекта, при котором
дальнейшее его использование по назначению недопустимо или
нецелесообразно, либо восстановление его работоспособного
состояния невозможно или нецелесообразно. Признаки предельного
состояния,
характеризуемые
значениями
установленных
диагностических параметров и показателей надежности, приводятся в
технической документации на объект;
6) состояние правильного функционирования — состояние
объекта, при котором он выполняет предписанный алгоритм
функционирования
при
соответствии
всех
параметров,
контролируемых
визуально
или
штатными
приборами
и
устройствами, техническим требованиям.
С изменением свойств объекта его состояние может изменяться
в пределах одного вида или происходит переход в состояние другого
вида. События перехода объекта из исправного в неисправное, но
работоспособное состояние называется повреждением. Событие
перехода объекта в неработоспособное состояние называется
отказом.
Отказы можно классифицировать по различным признакам.
Рассмотрим наиболее часто используемые при диагностировании и
исследовании надежности виды отказов.
Внезапный отказ — отказ, которому не предшествуют
наблюдаемые направленные изменения одного или нескольких
диагностических параметров.
Постепенный отказ — отказ, которому предшествуют
постепенные наблюдаемые изменения одного или нескольких
диагностических
параметров,
т.е.
имеет
место
процесс
контролируемого изменения степени работоспособности объекта.
Явный отказ — отказ, характеризующийся выходом объекта из
состояния правильного функционирования.
Скрытый отказ — отказ, выявляемый лишь при проведении
технического обслуживания объекта или специальными средствами и
методами диагностирования.
Частичный отказ — переход в неработоспособное состояние
одного или нескольких элементов, не приводящий к общему отказу
объекта.
12
Сбой
—
самоустраняющийся
отказ,
приводящий
к
кратковременному нарушению работоспособности.
Важной задачей является не только установление факта отказа,
но и определение причин и способов его устранения.
Причинами отказа могут быть естественные процессы старения
и изнашивания материала и узлов элементов объекта, отклонения
условий эксплуатации, хранения, транспортирования от расчетных,
нарушения правил эксплуатации, ошибки проектирования и
конструирования, нарушение технологии изготовления и монтажа,
дефекты в исходных материалах и комплектующих изделиях и т.п.
Причинами самоустраняющихся отказов могут быть помехи,
дефекты программного обеспечения, кратковременные значительные
изменения эксплуатационных условий и режимов.
Непосредственным следствием этих вышеперечисленных
причин является возникновение дефектов, некоторые из которых и
приводят к нарушению работоспособности объекта.
Дефектом считается каждое отдельное несоответствие объекта,
его элементов, комплектующих изделий или материалов требованиям
технической документации.
Примеры некоторых характерных дефектов: механическое
разрушение детали или узла, выход размера детали за пределы
допуска, неправильная сборка или установка, применение первичного
элемента с параметрами, отличными от указанных в конструкторской
документации, обрыв в электрической цепи, нарушение целостности
электрической изоляции, царапина на защитном или декоративном
покрытии и т.п.
Событие перевода отказавшего объекта в работоспособное
состояние путем устранения дефекта без вывода объекта из
эксплуатации называется восстановлением. Устранение дефекта при
этом может производиться посредством ремонта или замены
дефектных элементов.
§ 1.3. Надежность и эффективность
Понятие надежности определяет свойство объекта сохранять во
времени работоспособное состояние в заданных режимах и условиях
эксплуатации, хранения, транспортирования. Надежность — понятие
сложное,
включающее
в
себя
характеристики
некоторой
совокупности более простых (частных) свойств, определяющих
13
пригодность объекта к нормальной эксплуатации. Эти частные
свойства называют также сторонами надежности, или ее составными
частями. К их числу относятся такие свойства, как безотказность,
долговечность,
сохраняемость,
ремонтопригодность,
контролепригодность.
В свою очередь, надежность является одной из составляющих
частей
более
широкого
понятия —
эффективности.
Под
эффективностью в данном случае понимается обобщенное свойство
объекта, характеризующее его приспособленность к выполнению
поставленных задач с учетом пригодности к эксплуатации как в
расчетных, так и в экстремальных условиях, качества выполнения
заданного алгоритма действий, затрат на изготовление и
эксплуатацию, характера воздействия на окружающую среду, степени
безопасности эксплуатации и др.
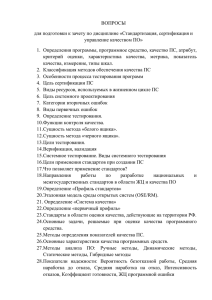
На рис.1.1 приведена примерная структурная схема связей
составляющих частей эффективности и надежности технического
объекта.
Живучесть определяет свойство объекта сохранять состояние
работоспособности или правильного функционирования при
неблагоприятных воздействиях, не соответствующих расчетным
условиям нормальной эксплуатации.
Качество
функционирования
характеризует
уровень
выполнения объектом части или всех функций в соответствии с
заданным алгоритмом. Показатели обеспечиваемого качества
функционирования приводятся в технической документации и могут
входить в число диагностических параметров, обеспечивающих
контроль таких, например, свойств, как быстродействие, точность,
помехоустойчивость, пропускная способность и т.п.
Безотказность — свойство объекта непрерывно сохранять
работоспособность в течение некоторого времени или некоторой
наработки.
При
этом
под
наработкой
понимается
как
продолжительность работы, измеряемая в единицах времени, так и
объем выполненной работы или произведенных действий
(километраж пробега, число рабочих циклов, оборотов, запусков и
т.п.).
14
Эффективность объекта
Эффективность
функциональноцелевая
Ж ивучесть
Эффективность
монтажноэксплуатационная
К ачество
функционирования
Экономичность
Н адежность
Безотказность
Безопасность
К омпактность
Сохраняемость
Долговечность
К онтролепригодность
Ремонтопригодность
Рис.1.1. Структура понятия эффективности технического объекта
Долговечность
—
свойство
объекта
сохранять
работоспособность до наступления предельного состояния в
расчетных условиях использования при установленной системе
технического обслуживания и ремонта.
Объект может перейти в предельное состояние, оставаясь
работоспособным, если его дальнейшее применение по назначению
станет недопустимым по требованиям безопасности, экономичности,
эффективности и пр. или нецелесообразным с учетом возможности
проведения восстановительного ремонта. В то же время объект,
перешедший в неработоспособное состояние, может не достигнуть
предельного состояния, если восстановление его работоспособности
целесообразно и возможно.
Сохраняемость — свойство объекта непрерывно сохранять
работоспособность в течение всего времени хранения и (или)
транспортирования, а также при перерывах в использовании. Для
некоторых видов объектов сохраняемость включает требование
сохранения установленного запаса работоспособности или же
15
сохранения в заданных пределах показателей безотказности и
долговечности.
Ремонтопригодность — свойство объекта, характеризующее
его приспособленность к поддержанию и восстановлению
работоспособного или исправного состояния путем технического
обслуживания и ремонта. Иногда термин «ремонтопригодность»
трактуется в более широком смысле, включающем в себя и
приспособленность объекта к контролю технического состояния и
обнаружению причин отказов. При дальнейшем изложении материала
этот термин будет использоваться лишь в соответствии с
вышеприведенным определением.
Частным
видом
ремонтопригодности
является
восстанавливаемость,
характеризующая
приспособленность
объекта к восстановлению работоспособности без вывода его из
эксплуатации.
Контролепригодность — свойство объекта, характеризующее
его приспособленность к диагностированию, т.е. контролю
технического
состояния,
определению
работоспособности,
выявлению причин отказа, определению места и вида дефекта,
вызвавшего отказ, прогнозированию изменения состояния и
показателей надежности. При оценке уровня контролепригодности
используются диагностические показатели, технические требования к
средствам диагностирования и конструктивному исполнению
объекта.
Глава 2.
ОБЩИЕ СВЕДЕНИЯ О ВЕРОЯТНОСТНЫХ ПРОЦЕССАХ
§ 2.1. Случайные события и их потоки
Под событием в теории вероятности понимается всякий факт,
который в результате опыта (наблюдений) может произойти или не
произойти.
События
характеризуются
степенью
возможности
их
появления — вероятностью события. Максимальная вероятность
присуща любому достоверному событию, т.е. такому событию,
которое в результате опыта непременно должно произойти.
Минимальная вероятность присуща любому невозможному событию,
которое в данном опыте не может произойти. Эти экстремальные
16
значения вероятностей оценивают соответственно числами 1 и 0. Все
другие события — возможные, но не достоверные — будут
характеризоваться вероятностями, числовые значения которых
находятся в этом диапазоне. Такие события называются случайными.
Характерным признаком случайного события является то, что
оно принадлежит к категории массовых явлений, т.е. существует
возможность его оценки по результатам неоднократного повторения
опыта в заданных условиях.
Примерами случайных событий, которые рассматриваются в
теории надежности, являются:
1) событие, заключающееся в том, что на некотором интервале
времени от 0 до t объект не теряет свою работоспособность;
2) событие, заключающееся в том, что на некотором интервале
времени от 0 до t объект переходит в неработоспособное состояние
(происходит его отказ);
3) событие, заключающееся в том, что работоспособный к
моменту времени t объект перейдет за малый промежуток времени t
в неработоспособное состояние и т.п.
Случайные события, происходящие одно за другим в некоторой
последовательности, образуют поток случайных событий. При этом
события могут быть однородными или различными. В качестве
примера потоков однородных событий можно привести потоки
отказов и потоки восстановлений восстанавливаемого объекта. Такой
поток можно представить в виде последовательности точек t1 , t 2 ,...,
t k ,... на числовой оси времени, соответствующих моментам
появления событий (рис.2.1).
Рис.2.1. Графическое представление потока
однородных случайных событий
Потоки событий различаются в зависимости от вида и характера
проявления их свойств. Рассмотрим некоторые потоки, обладающие
наиболее простыми свойствами.
Стационарный поток — поток, в котором вероятность
попадания того или иного числа событий на некоторый участок
времени (рис. 2.1) зависит только от длины этого участка и не
17
зависит от того, где именно на оси времени он расположен. Для
стационарного потока плотность потока событий — среднее число
событий в единицу времени — величина постоянная во времени.
Поток без последействия — поток событий, в котором для
любых неперекрывающихся участков времени число событий,
попадающих на один из них, не зависит от числа событий,
попадающих на другой. Отсутствие последействия в потоке означает
также, что будущее развитие процесса появления событий не зависит
от того, как этот процесс протекал в прошлом.
Ординарный поток — поток событий, в котором вероятность
попадания на элементарный участок времени t двух или более
событий пренебрежимо мала по сравнению с вероятностью
попадания одного события. Практически это означает, что в любой
момент времени возможно лишь одно событие.
Если поток событий обладает всеми тремя рассмотренными
свойствами (стационарностью, ординарностью и отсутствием
последействия), он называется простейшим, или стационарным
пуассоновским потоком. Для него вероятность появления n числа
событий на некотором интервале времени
a n a
Pn ( )
e , (n=0,1,2...),
n!
(2.1)
где а — среднее число событий на интервале .
Выражение (2.1) носит название закона распределения
Пуассона.
Практика
исследования
потоков
отказов,
потоков
восстановлений,
а
также
большинства
других
потоков,
рассматриваемых при исследовании надежности, свидетельствует о
возможности их представления как простейших.
§ 2.2. Случайные величины
Случайной величиной называется величина, которая в
результате опыта может принять то или иное значение, неизвестное
заранее. В зависимости от вида возможных реализаций случайные
величины подразделяются на дискретные и непрерывные.
18
Дискретная случайная величина может принимать значения
только из некоторого дискретного множества, например, число
отказов изделий из наблюдаемой выборки за установленный
промежуток времени.
Непрерывная случайная величина может принимать любые
значения на некотором конечном или бесконечном отрезке,
например, температура обмотки электрической машины, время
работы объекта до момента наступления отказа и т.п.
Случайные величины обозначают заглавными буквами конца
латинского алфавита (X,Y,Z,...), а их возможные значения —
соответствующими малыми буквами (x,y,z,...).
Полное представление о случайной величине дает закон
распределения случайной величины, устанавливающий соотношение
между возможными ее значениями и их вероятностями.
Закон распределения может быть задан в различной форме. Так,
например, простейшими формами его задания являются табличная и
графическая, но они применимы для описания лишь дискретных
случайных величин.
Универсальной
характеристикой,
описывающей
закон
распределения, является функция распределения случайной
величины, выражающая вероятность того, что величина X может
принимать значения меньше некоторого установленного (x) :
F(x) = P(X < x).
(2.2)
Выражение (2.2) представляет собой интегральную форму
закона распределения.
При решении некоторых задач надежности и технической
диагностики необходимо рассчитывать вероятность попадания
случайной величины на участок в диапазоне значений от до , т.е.
P(<X<).
Выразим эту вероятность через функцию распределения
величины X. Для этого рассмотрим три события:
событие А, состоящее в том, что Х < ;
событие В, состоящее в том, что Х < ;
событие С, состоящее в том, что < Х < .
Событие А включает в себя события В и С, т.е. А=В+С. События
В и С несовместные, так как они не могут появляться вместе. Для
этого случая применима теорема сложения вероятностей, которая
19
формулируется
следующим
образом.
Вероятность
несовместных событий равна сумме их вероятностей.
суммы
Следовательно, можно записать
P(Х < ) = P(Х < ) + P( < Х < ),
или
F() = F() + P( < Х < ),
откуда
P( < Х < ) = F() - F(),
(2.3)
т.е. вероятность попадания случайной величины на заданный участок
равна приращению функции ее распределения на этом участке.
Рассмотрим в общем случае вместо участка ( ,) участок
(х, х+х). Тогда в соответствии с формулой (2.3)
P(x<X<x+x) = F(x+x) - F(x).
Выразим величину средней вероятности на этом участке и
вычислим ее предел при х0. В результате получим производную
от функции распределения случайной величины Х :
F( x x ) F( x )
F ( x ) .
x
x 0
lim
(2.4)
Введем обозначение
F ( x ) f ( x ) .
(2.5)
Функция f ( x ) — производная функции распределения —
характеризует как бы плотность, с которой распределяются значения
случайной величины. Эта функция называется плотностью
распределения, или плотностью вероятности случайной
величины.
Она
существует
лишь
для
непрерывной
дифференцируемой функции F(x), т.е. лишь для непрерывных
случайных величин, и представляет собой дифференциальную форму
закона распределения.
20
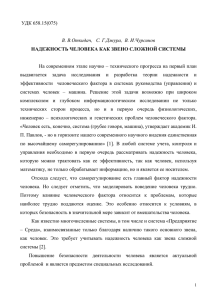
Функцию
f(x)
можно
выразить
графически
распределения, например, как показано на рис. 2.2.
кривой
Рис.2.2. Кривая распределения непрерывной случайной величины
Вероятность попадания величины Х на некоторый участок (,)
P ( X ) f ( x )dx ,
(2.6)
т.е. равна площади под кривой распределения, опирающейся на этот
участок, как показано на рис.2.2. Величина f(x)dx называется
элементом вероятности. Геометрически он представляет собой
площадь элементарного прямоугольника, опирающегося на отрезок
dx.
Зададимся
обратной
задачей
—
выразим
функцию
распределения через плотность распределения. По определению
F(x) = P(X < x) = P(- < X < x),
откуда по формуле (2.6) имеем
F( x )
x
f ( x )dx .
(2.7)
Геометрически F(x) представляет собой площадь под кривой
распределения, лежащую левее текущей координаты х.
21
§ 2.3. Характеристики положения случайной величины
Функция распределения и плотность распределения полностью
описывают случайную величину с вероятностной точки зрения.
Однако при решении ряда практических задач нет необходимости в
такой полной характеристике. Зачастую достаточно бывает указать
только отдельные числовые параметры, характеризующие некоторые
существенные признаки распределения случайной величины. Такие
параметры называются числовыми характеристиками случайной
величины.
Наиболее
часто
используемыми
из
них
являются
характеристики, определяющие положение случайной величины на
числовой оси: математическое ожидание, дисперсия, среднее
квадратическое отклонение.
Математическое
ожидание
( Mx )
определяет
центр
распределения случайной величины, вокруг которого группируются
все ее возможные значения.
Для дискретной случайной величины
n
M x xi pi ,
(2.8)
i 1
где n — число возможных значений случайной величины; p i —
вероятность i-го значения случайной величины (xi).
Для непрерывной случайной величины
Mx
xf ( x )dx .
(2.9)
Дисперсия ( Dx ) характеризует рассеяние значений случайной
величины около ее математического ожидания.
Для дискретной величины
n
Dx ( xi M x )2 pi ,
(2.10)
i 1
для непрерывной —
Dx
x2
( x M x )2 f ( x )dx .
22
(2.11)
Среднее квадратическое
случайной величины Х
x Dx .
отклонение,
или
стандарт
(2.12)
На практике числовые характеристики случайных величин часто
определяют по результатам эксперимента в виде статистических
оценок:
M̂ x X
1 n
xi ;
n i 1
(2.13)
D̂ x s x2
1 n
( x i X )2 ,
n 1 i 1
(2.14)
где n — число наблюдений; X — среднее арифметическое
результатов наблюдений.
§ 2.4. Законы распределения случайных величин
Вид характеристик случайной величины F(x) и f(x) определяет
характер ее распределения. В теории вероятности известно большое
число видов таких распределений. Они называются законами
распределения и имеют собственные названия.
В теории надежности наиболее широкое распространение
получили следующие из них: биноминальный (биноминальное
распределение) и Пуассона — для дискретных случайных величин
(событий), экспоненциальный (экспоненциальное распределение),
Гаусса (нормальный закон, или нормальное распределение), Вейбулла
и гамма-распределение — для непрерывных случайных величин.
Биноминальное распределение представляет собой
распределение вероятностей появления n числа событий в m
независимых опытах, в каждом из которых вероятность появления
рассматриваемого события постоянна и равна p.
Pmn C mn p n ( 1 p )m n ,
23
(2.15)
где C mn — число сочетаний из m по n.
Cmn
m!
.
n! ( m n )!
Математическое ожидание и дисперсия числа событий
M n mp; D n M n ( 1 p ) mp( 1 p ) .
Биноминальному распределению подчиняется, например, число
бракованных изделий из большой партии продукции.
Закон Пуассона описывает распределение вероятностей числа
событий n, происходящих на некоторых одинаковых интервалах
времени при условии, что поток рассматриваемых событий является
простейшим. В соответствии с выражением (2.1) он может быть
представлен как
( )n
Pn ( )
e ,
n!
(2.16)
где — интенсивность появления случайного события (среднее
число событий в единицу времени); — среднее число событий за
время .
Математическое ожидание и дисперсия событий на интервале
времени
M n , ; Dn , .
Закон Пуассона обычно применяют для определения
вероятности отказов сложных восстанавливаемых объектов, в состав
которых входит большое число высоконадежных элементов. В этих
случаях, поток отказов объекта представляет собой сумму большого
числа потоков редких отказов отдельных элементов. При этом на
рассматриваемом интервале времени отказы объекта, вызываемые
отказом любого из элементов, происходят относительно часто, но их
вероятность весьма мала.
24
Экспоненциальное
распределение
применяют
при
исследовании времени наработки до отказа невосстанавливаемых
объектов и для определения времени между последовательными
отказами в восстанавливаемых объектах. Таким образом, в качестве
случайной величины здесь выступает время наработки до отказа или
между отказами — T.
Характеристики
распределения,
соответствующие
экспоненциальному закону:
F ( t ) 1 e t ;
(2.17)
f ( t ) e t .
(2.18)
Характеристики положения случайной величины T:
M t tf ( t )dt te t dt
0
Dt ( t M t )2 f ( t )dt
0
1
2
1
.
;
(2.19)
(2.20)
Отличительным признаком экспоненциального распределения
является постоянство интенсивности отказов , что наблюдается при
работе объекта в интервале времени, когда период приработки
закончился, а процесс старения и изнашивания еще не проявляется в
явном виде.
Условие =const также выполняется при наблюдении за
сложными восстанавливаемыми объектами, у которых отказы
вызываются отказами любого из большого числа составляющих
элементов, что характерно для простейшего потока отказов.
Этими обстоятельствами, а также возможностью существенного
упрощения расчетов в пределах допустимых погрешностей
объясняется широкое применение экспоненциального закона в
инженерной практике.
Нормальный
закон
распределения
наиболее
часто
применяется на практике. Его используют обычно, когда случайная
величина зависит от большого числа случайных факторов,
25
однородных по своему влиянию, причем влияние каждого из них по
сравнению со всей их совокупностью незначительно. Этим законом
хорошо описываются результаты независимых измерений физических
величин, когда в качестве случайной величины выступает
измеряемый параметр. Нормальному закону подчиняется также
распределение такой случайной величины, как время наработки
объекта до отказа, особенно в период, когда начинают существенно
проявляться явления изнашивания и старения.
В общем случае характеристики распределения случайной
величины Х имеют вид:
f(x)
F( x )
1
x
x
f ( x )dx
1
x
( x M x )2
;
exp
2
2
2 x
( x M x )2
dx .
exp
2
2
2 x
(2.21)
x
(2.22)
Если в качестве случайной величины рассматривается время,
например, продолжительность безотказной работы объекта, то
используется усеченный нормальный закон
t
F ( t ) f ( t )dt
0
1
t
( t M t )2
dt .
exp
2
2 0
2
t
t
(2.23)
При этом следует иметь в виду, что выражение (2.23)
справедливо лишь при условии M t 2 t , что имеет место для
большинства элементов в составе электротехнических систем.
Для удобства вычисления формула (2.22) приводится к виду
F ( x ) 0,5 ( u ),
(2.24)
где выражение
( u )
u2
1 u
exp 2 du
2 0
носит название нормальной функции распределения,
нормированной функции Лапласа. Ее значения для аргумента
26
(2.25)
или
u
x Mx
(2.26)
x
приводятся в справочной литературе. Аналогично преобразуется и
выражение (2.23 ).
Графики, характеризующие экспоненциальное и нормальное
распределения, приведены на рис.2.3.
Рис.2.3. Графическое представление законов распределения:
а — экспоненциального; б — нормального
Гамма-распределение (-распределение) случайной величины
используется для характеристики времени возникновения отказов
сложных электротехнических систем на начальной стадии
эксплуатации, т.е. в период их приработки, а также при исследовании
надежности объектов с резервированными элементами. При этом
рассматриваются события отказа объекта после k отказов элементов,
подчиняющихся экспоненциальному закону распределения с
интенсивностью 0 .
Характеристики гамма-распределения:
( 0 t )k 1
f ( t ) 0
exp( 0 t ) ;
(k )
F( t )
k0
t
t
(k )
0
27
k 1
exp( 0t )dt ,
(2.27)
(2.28)
где 0 и k — параметры гамма-распределения; ( k ) ( k 1 )! —
гамма-функция.
Распределение Вейбулла — распределение промежуточное
между нормальным и экспоненциальным. Оно удобно для подбора
наиболее подходящего выражения по результатам эксперимента.
Наблюдается при отказах некоторых механических узлов, например,
шарикоподшипников; при отказах электрической изоляции,
инициируемых постепенным накоплением дефектов; при отказах
некоторых электрических элементов в период приработки и в
режимах ускоренных испытаний на надежность, т.е. когда имеют
место механические и электрические перегрузки.
Вид функции распределения по этому закону:
F ( t ) 1 exp( 0t a ) .
(2.29)
Плотность распределения —
f ( t ) 0at a 1 exp( 0t a ),
(2.30)
где 0 , a — параметры закона распределения.
§ 2.5. Понятие и характеристики случайных процессов
Если случайная величина изменяется в процессе опыта в связи с
изменением некоторых факторов, то ее можно характеризовать
случайной функцией, т.е. такой функцией, которая в результате
опыта принимает тот или иной вид, неизвестный заранее.
Конкретный вид, принимаемый случайной функцией при проведении
опыта, называется ее реализацией.
Случайная функция, аргументом которой является время,
называется случайным, или вероятностным процессом.
Понятие «поток событий» и «процесс» взаимосвязаны.
Например, процесс изменения состояния объекта вызывается
потоками отказов и восстановлений. Более того, в некоторых
литературных источниках эти понятия рассматриваются как
идентичные.
28
Рассмотрим некоторый случайный процесс (случайную
функцию) X ( t ) . Предположим, что в результате проведения n
независимых опытов получено n ее реализаций (рис.2.5). Обозначим
их соответственно номеру опыта как x1( t ), x2 ( t ),..., xn ( t ). Каждая из этих
реализаций является обычной (неслучайной) функцией времени.
Зафиксируем некоторое значение аргумента, например, t t j .
При этом получим n численных значений x1 ( t j ), x 2 ( t j ),..., x n ( t j )
случайной величины X ( t j ) в момент времени t j .
Используя m подобных сечений по оси t, можно с некоторым
приближением
заменить
рассмотрение
случайной
функции
рассмотрением
системы
m
случайных
величин:
X ( t1 ), X ( t2 ),..., X ( tm ). По мере увеличения числа таких сечений
подобная замена дает все большую точность. В пределе при
бесконечно большом числе сечений можно получить полностью
адекватное описание случайной функции. Таким образом, понятие
случайной функции можно рассматривать как обобщенное понятие
системы случайных величин. Следовательно, к случайной функции
применимо такое понятие, как закон распределения. Однако его
выражение в виде функции бесконечного множества аргументов
практически невозможно.
При решении задач надежности и диагностики используют
вероятностные характеристики, аналогичные рассмотренным законам
распределения случайных величин, но для определенных временных
сечений. Эти характеристики в общем случае зависят от места
сечения, т.е. от значения t, и выражаются как F ( x , t ) . Функция такого
вида называется одномерной функцией распределения случайной
функции X(t) и выражает одномерный закон распределения.
29
Рис.2.4. Пример реализации случайного процесса
Обычно рассматривают отдельные свойства случайных
функций, для описания которых используют простейшие
характеристики, аналогичные числовым характеристикам случайных
величин, такие как математическое ожидание, дисперсия и
среднеквадратическое отклонение, рассчитываемые для различных
моментов времени.
В отличие от числовых характеристик случайных величин,
представляющих
собой
определенные
числовые
значения,
характеристики случайных функций в общем случае представляют
собой не числа, а функции времени, причем неслучайные.
Математическим ожиданием случайной функции X(t)
называется неслучайная функция M x ( t ) , которая при каждом
значении аргумента t равна математическому ожиданию случайной
величины в соответствующем сечении случайной функции. Она
представляет собой некоторую среднюю функцию, около которой
варьируются все возможные реализации случайного процесса.
Дисперсией случайной функции X(t) называется неслучайная
функция Dx ( t ) , значение которой для каждого t равно дисперсии
случайной величины в этом сечении.
В соответствии с этими определениями M x ( t ) и Dx ( t ) могут
быть рассчитаны по формулам, рассмотренным в § 2.3.
Среднее квадратическое отклонение случайной функции
x ( t ) Dx ( t ) .
30
(2.31)
Если аргумент t принимает лишь дискретные значения,
функцию X(t) называют случайным процессом с дискретным
временем (случайная последовательность событий), если же t
изменяется на некотором интервале, то X(t) — случайный процесс с
непрерывным временем.
В свою очередь, если случайные величины из совокупности,
образующей X(t), принимают дискретные значения, то имеет место
процесс с дискретными случайными значениями, если же —
непрерывные, то имеет место процесс с непрерывными случайными
значениями.
§ 2.6. Марковские случайные процессы
В теории надежности и технической диагностике наибольшее
распространение получили пуассоновские потоки таких событий, как
отказы, восстановления, неплановые простои, переводы в режим
диагностирования и пр. Все они характеризуют изменения состояния
объекта в процессе его использования и представляют собой
вероятностные процессы с дискретными значениями реализуемых
состояний при отсутствии последействия. Такого вида процессы
относятся к классу марковских случайных процессов.
Марковским процессом называют такой случайный процесс, у
которого для каждого момента времени вероятность любого
состояния объекта в будущем зависит только от его состояния в
настоящий момент времени и не зависит от того, каким образом
объект пришел в это состояние. При этом обязательным условием
является экспоненциальное распределение времени нахождения
объекта в каждом из возможных состояний.
Марковские процессы с дискретным временем, для которых
разности смежных моментов наблюдения ti ti 1 принимаются
одинаковыми, равными постоянной величине t — шагу, а
вероятности перехода из состояния в состояние зависят лишь от
величины шага и не зависят от того, где на оси времени происходит
переход, называются однородными марковскими процессами (ОМП),
или цепями Маркова.
31
ОМП может быть проиллюстрирован временной диаграммой
переходов, представляющей собой возможную реализацию процесса,
или графом состояний, как показано на рис.2.5 для случая трех
возможных состояний: S1 , S2 и S3 .
Шаги по оси времени приняты в относительных единицах
t* t / t .
Вершины графа представляют собой вероятности состояний Рi, а
операторы ветвей — интенсивности переходов qi , j . Возможно также
представление ОМП матрицей вероятностей переходов. Для графа,
изображенного на рис.2.5,б, такая матрица имеет вид
Pi , j
P1,1
P2 ,1
P3 ,1
P1,2
P2 ,2
P3 ,2
P1,3
.
P2 ,3
P3.3
Рис.2.5. Способы представления ОМП: а — временная
диаграмма переходов; б — граф состояний
Временной процесс перехода из состояния в состояние можно
представить
также
способом,
несколько
отличным
от
вышерассмотренного. При этом возможные переходы происходят не
в конце каждого дискретного шага, а спустя некоторое случайное
время i , j пребывания объекта в предыдущем состоянии S i перед
переходом в последующее S j . Процесс, рассматриваемый в такой
интерпретации,
называют
неоднородным
марковским,
или
полумарковским.
В теории надежности и технической диагностике рассматривают
в основном стационарные марковские процессы, т.е. такие процессы,
у которых вероятности нахождения объекта в возможных состояниях
32
остаются неизменными во времени. Значения этих вероятностей
могут быть получены в результате решения системы алгебраических
уравнений, описывающих граф состояний.
Уравнения составляют по правилу, заключающемуся в том, что
алгебраическая сумма входящих и выходящих сигналов для каждой
вершины графа равна нулю. Сигналы представляют собой
произведения вероятностей состояния на оператор выходящей ветви.
При этом входящие в вершину сигналы берут со знаком «плюс», а
выходящие — со знаком «минус». К полученной таким способом
системе добавляют уравнение
n
Pi 1 ,
i 1
где n — число вершин графа.
Методика описания нестационарных марковских процессов
рассматривается в § 5.6.
33
Глава 3.
ПОКАЗАТЕЛИ НАДЕЖНОСТИ
Надежность, как свойство объекта, проявляется в течение всего
времени, начиная с момента его изготовления и до момента снятия с
эксплуатации. При этом для невосстанавливаемых объектов
характерны
этапы
транспортирования,
хранения,
монтажа,
подготовки к эксплуатации, безотказной работы по назначению,
простоев, технического обслуживания, диагностирования. Для
восстанавливаемых объектов добавляются этапы восстановления.
Продолжительность каждого этапа в общем случае представляет
собой случайную величину времени, а всю продолжительность
«жизненного цикла» объекта можно описать как поток случайных
событий таких, как включения в рабочий режим, остановки, переводы
в режим диагностирования, отказы, восстановления и пр.
Следовательно, количественные оценки надежности и ее
составляющих частей должны иметь вероятностный характер и могут
быть представлены в виде показателей, используемых для
характеристики случайных величин и случайных процессов.
На стадиях проектирования и конструирования объекта
показатели надежности определяются в виде вероятностных
характеристик
его
диагностической
модели.
На
стадиях
экспериментальной отработки, испытаний и эксплуатации показатели
надежности определяются по результатам непосредственных
наблюдений за объектом или группой одинаковых объектов в
однородных условиях.
В первом случае используется аппарат теории вероятности, и
показатели выражают в виде их математических определений, или
математических оценок. Во втором случае используется аппарат
математической статистики, и показатели надежности выражают в
виде статистических определений, или статистических оценок.
Достоверность статистических оценок показателей надежности
в большой степени зависит от числа наблюдений и объема
получаемой при этом информации. Их использование при
исследовании надежности обоснованно лишь применительно к
объектам
крупносерийного
производства,
а
также
к
восстанавливаемым объектам с большой продолжительностью
эксплуатации.
34
§ 3.1. Показатели безотказности невосстанавливаемых объектов
Вероятность отказа — вероятность того, что в пределах
заданного времени или заданной наработки произойдет хотя бы один
отказ объекта.
Ее математическое определение
Q( t ) P( T t ) ,
(3.1)
где Т — случайная величина времени безотказной работы; t —
заданное значение времени. Из сравнения этого выражения с
выражением (2.2) следует, что вероятность отказа представляет собой
функцию распределения случайной величины — времени безотказной
работы, т.е.
Q( t ) F ( t ) .
Ее также называют функцией распределения отказов.
Статистическое определение вероятности отказа
Q̂( t )
n( t )
,
N
(3.2)
где N — количество объектов, работоспособных в начальный момент
времени наблюдений (t=0) или поставленных на испытание; n(t) —
количество объектов, отказавших на интервале времени наблюдения
от 0 до t .
В
тех
случаях,
когда
предусматривается
контроль
работоспособности объекта по значениям его диагностических
параметров zi , вместо формулы (3.1) используют выражение
Q( t ) Pmax ( zi max zi ( t ) zi min ) , i 1, k ,
(3.3)
по которому вероятность отказа определяется наибольшей
вероятностью выхода одного i-го диагностического параметра из k,
установленных технической документацией, за допустимые верхние
( z i max ) или нижние ( zi min ) пределы в момент времени t.
35
Вероятность безотказной работы — вероятность того, что в
пределах заданного времени или заданной наработки отказ объекта
не произойдет
P( t ) 1 Q( t ) .
(3.4)
Подставляя Q (t) из выражений (3.1) - (3.3), соответственно получим:
P( t ) P( T t ) ;
P̂ ( t )
N n( t )
;
N
P ( t ) Pmin ( zi min zi ( t ) zi max ), i 1, k .
(3.5)
(3.6)
(3.7)
Зависимость P(t) называют иногда функцией надежности.
Показатели, определяемые по формулам (3.1) – (3.7),
используются
в
основном
при
расчетах
надежности
невосстанавливаемых объектов. Использование их применительно к
восстанавливаемым объектам возможно для оценки надежности до
первого отказа или между смежными отказами, но при условии
полного восстановления характеристик объекта до первоначального
уровня.
Плотность распределения времени безотказной работы
(плотность вероятности отказа) невосстанавливаемых объектов f(t)
представляет
собой
плотность
безусловной
вероятности
возникновения первого отказа объекта, определяемую для
рассматриваемого момента времени. Ее математическое определение
при t0 в соответствии с формулой (2.5)
f(t )
dQ( t )
dP( t )
.
dt
dt
(3.8)
Некоторые авторы называют этот показатель частотой отказов и
обозначают как a(t). Его статистическая оценка рассчитывается по
результатам опыта как отношение числа объектов n(t), отказавших в
единицу времени на интервале t от (t -t / 2) до (t +t / 2), к числу
объектов на момент начала испытаний при условии, что отказавшие
объекты снимаются с испытаний без их замены:
36
â ( t ) f̂ ( t )
n( t )
N t
.
(3.9)
Интенсивность отказов (t) — плотность условной
вероятности возникновения отказа объекта, определяемая при
условии, что до рассматриваемого момента времени отказ не возник.
Математически (t) — условная плотность вероятности отказа,
т.е.
( t )
f (t )
1 dP( t )
.
P( t )
P ( t ) dt
(3.10)
Если поток отказов рассматривать как пуассоновский поток
событий,
интенсивность
отказов
будет
характеризовать
математическое ожидание числа отказов в единицу времени на
исследуемом интервале.
Статистическая оценка интенсивности отказов рассчитывается
аналогично расчету частоты отказов в соответствии с выражением
(3.9), но относительно среднего числа работоспособных объектов в
рассматриваемом интервале времени от (t - t / 2) до (t + t / 2 ):
ˆ ( t )
n( t )
N cp t
,
(3.11)
где N cp ( N i N i 1 )/ 2 ; N i , N i 1 — число работоспособных объектов
соответственно в начале и в конце интервала t .
Между
рассмотренными
показателями
существуют однозначные зависимости .
Интегрируя выражение (3.10), получим
t
t
0
0
безотказности
( t )dt ln P ( t ) ,
откуда
t
P ( t ) exp ( t )dt .
0
37
(3.12)
Из формул (3.4) и (3.8) следует
t
P ( t ) 1 f ( t )dt .
(3.13)
0
Таким образом, по математическому определению одного
показателя надежности можно найти три другие. Действительно, если
известна, например, функция f(t), то по уравнению (3.13) можно
определить P(t), а по уравнению (3.10) — (t). Если известна функция
(t), то по уравнению (3.12) находят P(t), а затем по (3.10) — f(t).
Следовательно,
для
характеристики
безотказности
невосстанавливаемых объектов показатели P(t), Q(t), f(t), (t)
являются равноправными. Однако на практике предпочтение отдают
интенсивности отказов (t).
В
качестве
еще
одного
показателя
безотказности
невосстанавливаемых объектов используют среднюю наработку до
отказа — T1 .
Средняя наработка до отказа
представляет собой
математическое ожидание случайной величины Т — времени работы
объекта до первого отказа.
Математическая оценка в соответствии с выражением (2.9)
T1 tf ( t )dt P ( t )dt .
0
(3.14)
0
Статистическая оценка
T̂1
1 N
ti ,
N i 1
(3.15)
где t i — продолжительность работы каждого i-го объекта из N
объектов, поставленных на испытание, до первого отказа.
38
§ 3.2. Показатели безотказности восстанавливаемых объектов
В качестве показателей безотказности восстанавливаемых
объектов обычно используют параметр потока отказов — (t) и
среднюю наработку на отказ — T0.
Параметр потока отказов — математическое ожидание числа
отказов восстанавливаемого объекта в единицу времени, взятое для
рассматриваемого момента времени. Математическая оценка
параметра потока отказов определяется как предел отношения
вероятности появления хотя бы одного отказа за промежуток времени
t к данному промежутку при t 0, т.е.
P1( t , t t )
.
t
t 0
( t ) lim
(3.16)
Некоторые авторы называют показатель (t) средней частотой
отказов. Его статистическая оценка рассчитывается по результатам
опыта как отношение числа объектов n(t), отказавших в единицу
времени на интервале t от (t – t / 2) до (t + t / 2 ) к общему
количеству испытуемых объектов при условии, что отказавшие
объекты немедленно восстанавливаются или заменяются новыми:
ˆ ( t )
n( t )
.
N t
(3.17)
Для сложных восстанавливаемых объектов, потоки отказов
которых можно рассматривать как стационарные потоки случайных
событий, =const, а значение и числено совпадают, т.е. (t) =
= (t) = = . Эти соотношения справедливы и для других объектов,
отказы которых распределяются по экспоненциальному закону.
Средняя
наработка
на
отказ
представляет
собой
математическое
ожидание
продолжительности
работы
восстанавливаемого объекта между соседними отказами.
39
Математическая оценка
T0
t
,
M nt
(3.18)
где t — суммарная наработка восстанавливаемого объекта на
интервале наблюдения; M[n(t)] — математическое ожидание числа
отказов в течение наработки t .
Статистическая оценка
T̂0
t
,
n( t )
(3.19)
Если имеется информация по группе одинаковых объектов,
находящихся в однородных условиях, достоверность оценки T0
может быть повышена в соответствии с выражением
T̂0
1
N
N
T̂0 j ,
(3.20)
j 1
где T̂0 j — средняя наработка на отказ каждого j-го из N
рассматриваемых объектов, рассчитанная по формуле (3.19).
Иногда при исследовании надежности восстанавливаемых
объектов используется такой показатель, как вероятность
безотказной работы в интервале времени (t 1 , t2).
Для ординарных потоков отказов без последействия он
определяется из выражения
t2
P ( t1 , t 2 ) exp ( t )dt .
t
1
(3.21)
Для стационарных потоков отказов, т.е. при (t) = = ,
P( t1 , t2 ) exp ( t2 t1 ) .
40
(3.22)
§ 3.3. Показатели долговечности и сохраняемости
Средний срок службы — математическое ожидание срока
службы. Под сроком службы объекта понимается календарная
продолжительность его эксплуатации с учетом технического
обслуживания, восстановления и возобновления эксплуатации после
ремонтов до перехода в предельное состояние.
Срок службы не следует отождествлять с безотказностью. Так,
объект, представляющий собой сложную систему, может за время
эксплуатации иметь большое число отказов, т.е. характеризоваться
относительно низкими показателями безотказности, и в то же время
находиться в эксплуатации в течение длительного времени. Это
объясняется тем, что срок службы сложного объекта определяется не
сроком службы его элементов, а зависит в основном от уровня их
восстанавливаемости и технического обслуживания.
Заводы изготовители часто приводят такой показатель, как
гарантийный срок службы, который всегда меньше среднего срока
службы. Он не характеризует надежность объекта, а лишь
устанавливает ответственность поставщика перед потребителем.
Основное значение показателя «средний срок службы»
заключается в том, что он определяет временной интервал, в котором
оценивается надежность объекта.
Его статистическая оценка может быть получена по результатам
наблюдений за группой одинаковых объектов в однородных условиях
эксплуатации как среднее арифметическое их сроков службы.
Гамма-процентный
срок
службы
—
календарная
продолжительность эксплуатации, в течение которой объект не
достигнет предельного состояния с вероятностью , выраженной в
процентах.
Средний ресурс — математическое ожидание ресурса, т.е.
общей наработки объекта от начала эксплуатации до перехода в
предельное состояние.
Отличие этого показателя от среднего срока службы
заключается в том, что в данном случае суммируются лишь
интервалы времени работы объекта по назначению без учета всякого
рода простоев. Используется он обычно для характеристики
надежности объектов ответственного назначения, у которых ведется
контроль продолжительности работы, величины пробега, числа
рабочих циклов и т.п.
41
Гамма-процентный ресурс — суммарная наработка, в течение
которой объект не достигнет предельного состояния с вероятностью
, выраженной в процентах.
Гамма-процентные показатели определяются как корни t
уравнения вида
F ( t ) 1 0 ,01 ,
(3.23)
где F(t ) — функция распределения ресурсов или срока службы
объекта.
Показатели сохраняемости по своей сути аналогичны
показателям долговечности. Различие заключается в том, что они
обеспечивают
оценку
способности
объекта
сохранять
работоспособное состояние в период после изготовления и до начала
эксплуатации.
Средний срок сохраняемости — математическое ожидание
срока сохраняемости, т.е. продолжительности хранения объекта в
расчетных условиях до перехода его в предельное или
неработоспособное состояние.
Гамма-процентный
срок
сохраняемости
—
срок
сохраняемости объекта, достигаемый с заданной вероятностью ,
выраженной в процентах. Рассчитывается по выражению,
аналогичному (3.23).
§ 3.4. Показатели ремонтопригодности и контролепригодности
В наибольшей степени ремонтопригодность определяет
надежность сложных объектов длительного использования. Для них
предусматривается система проведения технического обслуживания,
включающая не только профилактические мероприятия типа чистки,
смазки, замены изношенных деталей и т.п., но и выявление и
устранение причин отказов путем замены или ремонта отказавших
элементов, т.е. непосредственно восстановление.
Уровень ремонтопригодности в конечном итоге определяется
затратами на профилактику и восстановление, а также потерями,
связанными с вынужденными простоями объекта. Снижение таких
затрат обеспечивается рациональным конструктивным исполнением
42
объекта и составляющих его элементов, а также использованием
эффективных методов и средств диагностирования.
Поскольку
затраты
на
проведение
профилактических
мероприятий могут быть определены достаточно точно на весь
период эксплуатации объекта, наиболее важными в оценке ремонтои контролепригодности являются показатели, характеризующие
приспособленность объекта к восстановлению.
В качестве основной характеристики этого свойства обычно
принимают случайную величину — продолжительность, или время
восстановления Тв. В общем случае Тв включает в себя следующие
интервалы времени: Тс — от момента скрытого отказа до начала
диагностирования, Тд — от начала диагностирования до установления
факта отказа, Тпд — поиск причины и места отказа (дефекта), Тр —
непосредственно восстановление объекта (ремонт или замена
отказавшего элемента).
При проведении расчетов надежности обычно принимают
Тв = Тпд или Тв = Тр в зависимости от соотношения Тпд и Тр,
характерного для конкретного объекта.
Поскольку Тв — величина случайная, для оценки уровня
восстанавливаемости используются вероятностные показатели
аналогичные рассмотренным ранее.
Вероятность восстановления — вероятность того, что
отказавший объект будет восстановлен в течение заданного времени
t.
Этот показатель представляет собой функцию распределения
времени восстановления, его математическая оценка
S ( t ) P ( Tв t ) .
(3.24)
Статистическая оценка
Ŝ ( t )
nв t
,
Nв
(3.25)
где Nв — число объектов, поставленных на восстановление; nв(t) —
число объектов, восстановленных за время t.
Интенсивность восстановления — условная плотность
вероятности восстановления работоспособного состояния объекта,
43
определенная для момента времени t при условии, что до этого
момента восстановление объекта не произошло.
Математическая оценка
fв ( t )
dS( t )
1
,
1 S( t )
dt 1 S ( t )
( t )
(3.26)
где fв(t) — плотность распределения времени восстановления.
Статистическая оценка
nв ( t )
ˆ ( t )
N нв ср t
,
(3.27)
где nв(t) — число объектов, восстановленных на интервале времени
t от (t - t / 2) до (t + t / 2); Nнв ср — среднее число объектов, не
восстановленных на интервале t,
N нв ср
N нв i N нв(i + 1)
2
;
N нв i , N нв( i + 1) — число объектов, не восстановленных соответственно
в начале и в конце интервала t .
Среднее время восстановления — математическое ожидание
времени восстановления работоспособного состояния объекта после
его отказа.
Tв ср tf в ( t )dt ( 1 S ( t ))dt .
0
(3.28)
0
Статистическая оценка
1
T̂в cp
Nв
Nв
tв i ,
(3.29)
i 1
где tв i — длительность восстановления каждого i-го объекта из
числа Nв объектов, поставленных на восстановление.
44
В качестве основных показателей контролепригодности
используют такие показатели, как
средняя оперативная
трудоемкость
диагностирования (C д) и коэффициент
безразборного диагностирования (Kбд ).
n
C c i ,
(3.30)
i 1
где n — число операций диагностирования, необходимых для
определения состояния объекта; c i — средняя оперативная
трудоемкость i-й операции диагностирования, выраженная в нормочасах.
Kб д Пк / По ,
(3.31)
где Пк — число диагностических параметров, для измерения которых
не требуется проведение демонтажно-монтажных операций; По —
общее число установленных диагностических параметров .
§ 3.5. Комплексные показатели надежности
Комплексными
называются
показатели,
определяющие
количественную характеристику двух или нескольких составляющих
частей надежности.
Коэффициент готовности KГ представляет собой вероятность
того, что объект окажется в работоспособном состоянии в
произвольный момент времени, кроме планируемых периодов, в
течение которых применение объекта по назначению не
предусматривается.
Статистическая оценка
K̂ Г
t pc
t pc t в
,
(3.32)
где t pc — суммарное время нахождения объекта в работоспособном
состоянии; t в — суммарное время восстановления объекта.
45
Учитывая, что t pc T0 n , а t в =Tвсрn, где n — число отказов на
интервале времени, для которого определяются значения t pc и t в ,
формулу (3.32) можно представить в виде
KГ
T0
.
T0 Tв с р
(3.33)
Выражение (3.33) находит широкое применение в инженерной
практике. Степень его приближения к истинному значению KГ тем
больше, чем больше интервал времени, на котором определяются
t pc и tв. При этом потоки отказов и восстановлений становятся
установившимися и KГ приобретает стационарный характер.
Коэффициент оперативной готовности K ОГ характеризует
надежность объекта, необходимость применения которого возникает
в произвольный момент времени, после которого требуется
безотказная работа в течение некоторого заданного интервала
времени.
Он представляет собой вероятность того, что объект окажется в
работоспособном состоянии в произвольный момент времени t, кроме
планируемых перерывов в работе, и, начиная с этого момента,
проработает безотказно в течение заданного времени .
Математическая оценка
K ОГ ( t , ) K Г ( t )P ( ),
(3.34)
где P() вероятность безотказной работы объекта на интервале
заданного времени .
Статистическая оценка
K̂ ОГ ( t , )
N ( t , )
,
N
(3.35)
где N(t,) — число объектов из общего их количества N,
работоспособных в момент времени t и безотказно проработавших в
течение времени .
Коэффициент технического использования K ТИ характеризует
долю времени нахождения объекта в работоспособном состоянии
46
относительно общей продолжительности эксплуатации. Его
статистическая оценка
K TИ
t pc
t рс t нр
,
(3.36)
где tнр — суммарное время всех простоев объекта, связанных с его
диагностированием,
восстановлением,
профилактическим
обслуживанием и пр.
Глава 4.
ОСНОВЫ РАСЧЕТА НАДЕЖНОСТИ
§ 4.1. Общие положения
Рассчитать надежность системы (или в общем случае —
объекта) — значит определить ее показатели надежности по
известным характеристикам элементов. Вид и количество
определяемых показателей зависят от постановки конкретной задачи.
Расчет надежности является обязательной частью общего
состава инженерных расчетов на всех этапах создания и эксплуатации
технических изделий. При этом характер расчетов и применяемые
методы определяются объемом имеющейся информации, видом
структурных и функциональных связей элементов, степенью их
восстанавливаемости.
На стадиях проектирования и конструирования расчеты
надежности производятся с использованием логико-вероятностных
методов, на стадиях отработки опытных образцов, промышленного
изготовления и эксплуатации — с использованием статистических
методов.
В общем случае расчеты выполняются поэтапно в соответствии
с нижеприведенной процедурой.
47
1. Разделение объекта (системы) на элементы, для которых
известны
или
могут
быть
получены
экспериментально
количественные показатели надежности (отдельные устройства,
блоки, узлы, аппараты, первичные элементы и пр.)
2. Формулирование условий работоспособности и понятия
отказа для каждого элемента и системы в целом. При этом должны
быть установлены основные технические требования к объекту, в том
числе совокупности диагностических признаков и допустимые
пределы их изменений.
3. Составление логической структурной схемы объекта или
логической функции его работоспособности.
Если отказ одного из элементов приводит к отказу группы
элементов, на схеме элементы такой группы соединяются
последовательно (основное соединение). Если отказ одного или
нескольких элементов (кроме последнего в группе) не приводит к
отказу группы в целом, элементы соединяют параллельно.
Структурные логические схемы сложных объектов — это
комбинации последовательного, параллельного и мостикового
соединения элементов и групп.
Логическая функция работоспособности представляет собой
логическую функцию сложного высказывания, определяющего
условия работоспособности системы. Она состоит из простых
высказываний, характеризующих работоспособность элементов,
связанных между собой логическими операциями. Например, «объект
находится в работоспособном состоянии, если в работоспособном
состоянии находятся: его элемент a и один из элементов b или d , или
элемент a и оба элемента b и d ». Логическая функция
работоспособности,
соответствующая
этим
условиям
(высказываниям), имеет вид
FЛ a ( b d ( b d )) .
4. Определение показателей безотказности всех групп
элементов, имеющих основное соединение. При этом расчет
показателей производится раздельно для невосстанавливаемых и
восстанавливаемых элементов по внезапным и постепенным отказам.
48
5. Определение показателей восстановления (ремонтопригодности) всех групп элементов с основным соединением, для которых
предусмотрено восстановление.
6.
Определение
показателей
надежности
групп
восстанавливаемых элементов с основным соединением с учетом их
показателей безотказности и восстанавливаемости.
7. Определение показателей надежности с учетом структурного
резервирования, временной и информационной избыточности.
В зависимости от постановки задачи и объема исходной
информации расчет надежности может производиться как
приближенный, или ориентировочный, и как полный, или
окончательный. В первом случае используют усредненные
(среднегрупповые) значения показателей надежности типовых
элементов. При этом в группу объединяются элементы, имеющие
примерно одинаковые интенсивности отказов. Поток отказов
принимается простейшим. Для полного расчета необходимо иметь
данные о реальных условиях и режимах работы элементов (степень
нагрузки, температура, влажность, механические воздействия и т. п.).
Закон
распределения отказов
объекта предварительно
выбирается из следующих условий: в период приработки — закон
Вейбулла или гамма-распределение, на участке нормальной
эксплуатации — экспоненциальный закон, на участке заметного
проявления старения и изнашивания — нормальное распределение.
При расчетах учитывается установленный на практике факт, что
внезапные отказы элементов распределяются в основном по
экспоненциальному закону, а постепенные — примерно по
нормальному.
§ 4.2. Расчет показателей безотказности при основном соединении
элементов без резервирования и восстановления
Вероятность безотказной работы системы, состоящей из n
последовательно соединенных элементов при условии независимости
их отказов
n
P ( t ) Pi ( t ) ,
i 1
49
(4.1)
где Pi (t) — вероятность безотказной работы i-го элемента.
При этом для каждого составного элемента, состоящего из ni
первичных элементов,
ni
Pi ( t ) pij ( t ) ,
(4.2)
j 1
где pij( t ) — вероятность безотказной работы каждого j-го первичного
элемента, входящего в состав i-го составного.
При условии независимости отказов отдельных первичных
элементов выражение (4.1) можно представить в виде:
N
P ( t ) p( t ) ,
(4.3)
k 1
где pk(t) — вероятность безотказной работы k-го первичного
элемента; N — число первичных элементов в системе (объекте).
С учетом формулы (3.12) вероятность безотказной работы
объекта с основным соединением составных и первичных элементов
можно выразить через значения интенсивностей их отказов как
t
N
P ( t ) exp k ( t )dt exp
k 1
0
k 1
N
t
k ( t )dt .
0
(4.4)
Выражения (4.3) и (4.4) наиболее общие для основного
соединения элементов. Они позволяют определить вероятность
безотказной работы объекта при любом законе распределения отказов
и изменения их интенсивности.
Как показано в § 2.4, отказы элементов на основной стадии
эксплуатации являются внезапными и распределяются по
экспоненциальному закону при k(t)=k=const. В этом случае
выражения для показателей безотказности объекта на интервале
времени его эксплуатации, когда приработка элементов завершена и
изнашивание еще не оказывает существенного влияния на
работоспособность, можно представить в виде
P( t ) e t ;
(4.5)
50
f ( t ) e t ;
(4.6)
T1 1/ ;
(4.7)
N
k .
(4.8)
k 1
Если имеется возможность объединения различных элементов в
отдельные группы по принципу равнонадежности (с одинаковыми
средними значениями интенсивности отказов i), то общая
интенсивность отказов объекта (системы) может быть рассчитана как
m
Ni i ,
(4.9)
i 1
где m — число групп равнонадежных элементов; Ni — число
элементов в i-й группе.
Для
реальных
высоконадежных
объектов
вероятность
безотказной работы Р(t) близка к единице, что определяет
соотношение t << 1. В этом случае в формулах (4.5), (4.6) вместо
выражения e t с высокой степенью точности можно использовать
лишь первые два члена его разложения в ряд. При этом получаем
удобные расчетные формулы:
P( t ) 1 t ;
(4.10)
f ( t ) (1 t ) ;
(4.11)
N
N
pk ( t ) 1 qk ( t ) ,
k 1
(4.12)
k 1
где qk(t) — вероятность отказа k-го первичного элемента.
Практическое использование этих формул допустимо при t 0,1.
Значения интенсивности отказов первичных и стандартных
элементов приводятся в справочной литературе и нормативнотехнической документации. Следует иметь в виду, что эти значения
51
являются усредненными (среднестатистическими) и получены
применительно к некоторым расчетным условиям эксплуатации.
Если реальные условия по некоторым факторам (степень
нагрузки, температура и влажность окружающей среды, способ
охлаждения, режим работы, механические воздействия и т. п.),
отличаются от расчетных, на стадии окончательного расчета
надежности следует учитывать степень их отклонения от расчетных
для каждого элемента. Наиболее распространенным способом такого
учета является введение коэффициентов нагрузки.
Коэффициенты нагрузки рассчитываются по каждому фактору и
в общем случае представляют собой отношение рабочего значения
некоторого параметра, характеризующего работу элемента, к его
номинальному или расчетному значению. Такими параметрами могут
быть в зависимости от вида элемента и условий его эксплуатации
электрическое напряжение, рассеиваемая мощность, ток нагрузки,
температура, частота и амплитуда вибрации и пр.
Интенсивности
отказов
элементов
в
этом
случае
рассчитываются по формуле
S
к ок K i ,
(4.13)
i 1
где ок — справочное значение интенсивности отказов k-го элемента;
Ki — коэффициент нагрузки по i-му фактору; S — число
учитываемых факторов (факторов, не соответствующих расчетным
условиям).
Отклонение условий эксплуатации от расчетных могут
учитываться также при помощи поправочных коэффициентов,
установленных для конкретных мест использования объекта, или
графиков зависимости интенсивности отказов элементов от
температуры и нагрузки.
Если элементы объекта работают не одновременно, вероятность
его безотказной работы рассчитывают по формуле
n
P ( t ) Pi ( ti ) ,
(4.14)
i 1
где ti — продолжительность работы
рассматриваемый интервал времени t.
52
i-го
элемента
за
По мере возрастания степени влияния на состояние объекта
факторов старения и изнашивания его элементов и узлов
стационарность потока отказов нарушается за счет возрастания числа
постепенных отказов, распределенных по нормальному или близкому
к нормальному закону.
При известных средних значениях наработки элементов до
отказа T1i и среднеквадратических отклонениях времени их
безотказной работы от среднего значения ti вероятность
безотказной работы объекта в соответствии с формулами (2.24),
(2.26) и (4.1) можно рассчитать как
n
P ( t ) ( 0 ,5 ( ui )) ,
(4.15)
i 1
где для каждого элемента аргумент нормальной
распределения вычисляется по стандартной формуле
ui
t T1 i
ti
функции
.
Если значения T1i и ti неизвестны, а контроль за состоянием
элементов ведется по диагностическим параметрам, вероятности их
безотказной работы в общем случае можно рассчитать, используя
выражение (3.7).
Обычно в этих случаях для оценки состояния каждого i-го
элемента используется лишь один обобщенный или определяющий
диагностический параметр zi и вид расчетных выражений для Pi(t)
определяется тенденцией изменения во времени случайной функции
Zi(t). При этом возможны следующие варианты:
1. Измеренные значения диагностического параметра с течением
времени возрастают. Отказ элемента происходит в некоторый момент
времени, когда значение диагностического параметра превысит его
допустимую по условиям работоспособности величину.
Вероятность безотказной работы такого элемента определяется
вероятностью невыхода значения диагностического параметра за
допустимый верхний уровень:
53
Pi ( t ) P ( zi ( t ) zi max ) .
(4.16)
Выражение (4.16) в соответствии с определением (2.2)
представляет собой функцию распределения случайной величины.
Отсюда с учетом формулы (2.24)
Pi t F ( zi max ) 0 ,5 ( u1i ) ,
где
u1i
zi max M z i ( t )
zi ( t )
;
Mzi ( t )
—
математическое
(4.17)
ожидание
значения диагностического параметра i-го элемента в момент
zi ( t )
времени
t;
—
среднеквадратическое
отклонение
диагностического параметра i-го элемента в момент времени t.
2. Измеренное значение диагностического параметра с течением
времени уменьшается. Отказ элемента происходит в некоторый
момент времени, когда значение диагностического параметра станет
меньше допустимой по условиям работоспособности величины.
Вероятность безотказной работы такого элемента определяется
вероятностью невыхода значения диагностического параметра за
допустимый нижний уровень:
Pi ( t ) P ( zi ( t ) zi min ).
(4.18)
В соответствии с формулами (2.2) и (2.24) можем записать
Pi ( t ) 1 F ( zi min ) 0 ,5 ( u2 i ) ,
где u2 i
zi min M z i ( t )
zi ( t )
(4.19)
.
3. Тенденция изменения измеренных значений диагностического
параметра неопределенная. Условия работоспособности элемента
определяются невыходом значений диагностического параметра за
пределы его допустимых верхних или нижних величин:
Pi ( t ) P( zi min zi ( t ) zi max ) .
Или с учетом выражений (2.3) и (2.24)
54
(4.20)
Pi ( t ) ( u1i ) ( u2i ) .
(4.21)
Вероятность безотказной работы по постепенным отказам
объекта в целом для всех рассмотренных случаев рассчитывается по
формулам (4.1) или (4.3).
При необходимости учета обоих видов отказов полную
вероятность безотказной работы объекта можно рассчитать как
P( t ) PП ( t )PB ( t ) ,
где PП(t), PB(t) — вероятности безотказной работы
соответственно по постепенным и внезапным отказам.
(4.22)
объекта
§ 4.3. Методы оценки показателей ремонтопригодности
нерезервированных объектов
Как показано в § 3.4, время восстановления объекта в основном
определяется длительностью поиска причины отказа (в частности —
дефекта) и продолжительностью проведения операции ремонта или
замены отказавшего элемента. В зависимости от сложности объекта,
эффективности системы диагностирования и квалификации
обслуживающего персонала за фактическое время восстановления
принимают либо время поиска дефекта, либо время его устранения
(ремонта).
Считая tв=tпд, определим вид функции распределения времени
обнаружения дефекта. Пусть S(t) — вероятность того, что это время
будет менее некоторого наперед заданного значения t. Рассмотрим
два промежутка времени: x и x+y . Вероятность необнаружения
дефекта за эти промежутки:
P ( t п д x ) 1 S ( x );
P ( t п д x y ) 1 S ( x y ).
Рассмотрим отношение этих зависимостей
55
1 S( x y )
.
1 S( x )
Поскольку функция распределения времени поиска дефекта не
зависит от продолжительности поиска, то справедливо соотношение
1 S( x y ) 1 S( y )
.
1 S( x )
1 S( 0 )
Очевидно, что S(0)=0. Тогда
1 S( x y ) ( 1 S( y ))( 1 S( x )) .
и
S( x y ) S( x )S( y ) S( x ) S( y ) .
Продифференцируем это выражение по x:
S( x y ) S( x )S( y ) S( x ) 0 .
Полученное дифференциальное уравнение справедливо при
любых значениях x. Примем x = 0.
S( y ) S( 0 )S( y ) S( 0 ) 0 .
По определению (3.26) интенсивность восстановления
( t )
fв ( x )
S ( x )
.
1 S( x ) 1 S( x )
В рассматриваемом случае x=0 и S(x)=0. Тогда
( t ) S( 0 ) .
Отсюда
S ( y ) S ( y ) .
56
Решая полученное линейное неоднородное дифференциальное
уравнение при условии S(0)=0 и заменив y на t, получаем
S( t ) 1 e
t
.
(4.23)
Аналогичное выражение может быть получено и при условии
tв=tp.
Поскольку закон распределения времени восстановления
является экспоненциальным, среднее время восстановления
Tв
cp 1 /
.
(4.24)
При известной интенсивности отказов объекта и его элементов i,
( i 1, n ) среднее время восстановления объекта [4]
Tв cр
i
.
i 1 i
1
n
(4.25)
Коэффициенты готовности для каждого восстанавливаемого
элемента могут быть рассчитаны по формуле
KГi
T0i
i
T0i Tв cp i i i
(4.26)
в соответствии с выражением (3.31), а для объекта в целом
n
K Г K Гi .
i 1
57
(4.27)
Глава 5.
РАСЧЕТ НАДЕЖНОСТИ С УЧЕТОМ РЕЗЕРВИРОВАНИЯ
§ 5.1. Понятие и виды резервирования
Структура объекта на начальной стадии его проектирования
определяется его функциональным назначением в соответствии с
требованиями технического задания и содержит минимально
необходимое для этого число элементов. В процессе последующего
проектирования и конструирования для достижения заданных
показателей, в том числе надежности, структурная схема объекта
усложняется, причем не только за счет введения дополнительных
элементов, способствующих улучшению качества функционирования,
но и за счет избыточности.
Избыточность — это дополнительные средства и возможности
сверх минимально необходимых для выполнения объектом заданных
функций с требуемым качеством. Избыточность, вводимая с целью
повышения надежности объекта, обеспечивает его резервирование.
Вообще, в технике резервированием называют способ повышения
надежности объекта введением избыточности.
Рассмотрим основные виды резервирования.
Структурное, или аппаратное резервирование предполагает
использование избыточных элементов объекта и их связей.
Назначение этих элементов — принимать на себя выполнение
рабочих функций при отказах соответствующих основных элементов.
Информационное
резервирование
предусматривает
использование избыточной информации. Примерами такого
резервирования могут служить повторение сообщений по каналам
связи, применение контрольных программ в цифровых устройствах и
т.п. Информационное резервирование обычно связано с введением
избыточных элементов.
Временнoе резервирование предусматривает использование
избыточного времени. Предполагается возможность продолжения
прерванного в результате отказа функционирования объекта после
восстановления при безусловном выполнении всех действий в
соответствии с заданным алгоритмом.
Перечисленные виды резервирования могут применяться как по
отношению к отдельным элементам или их группам, так и по
58
отношению к системе (объекту) в целом. В первом случае
резервирование — раздельное, во втором — общее. Чаще всего
используется структурное резервирование. В зависимости от
способов включения резервных элементов в работу различают
несколько его разновидностей.
Постоянное резервирование предусматривает параллельное
подключение резервных элементов к основным при их
одновременном совместном функционировании.
Резервирование замещением обеспечивает включение в работу
резервных элементов только после отказа соответствующих
основных.
Скользящее резервирование представляет собой резервирование
замещением, при котором группа основных элементов резервируется
одним
или
несколькими
резервными,
заменяющими
при
необходимости любой элемент в группе.
Одним из основных показателей избыточности структурного
резервирования является кратность резервирования.
Кратность резервирования представляет собой отношение
числа резервных элементов к числу ими резервируемых (основных),
выраженное несокращаемой дробью. В зависимости от числа
резервируемых и резервных элементов различают резервирование с
целой и дробной кратностью.
Резервирование с целой кратностью имеет место, когда один
основной элемент резервируется одним и более резервными.
Резервирование с дробной кратностью имеет место, когда два
и более однотипных основных элементов резервируются одним и
более резервными.
Резервирование с кратностью один к одному называется
дублированием.
На рис.5.1. приведены примеры логических схем рассмотренных
разновидностей структурного резервирования. При расчете
надежности систем со структурным резервированием предварительно
сводят структурные логические схемы с общим резервированием
(рис.5.1,а,в) к схеме резервированного элемента (рис.5.1,б) путем
замены
групп
последовательно
соединенных
элементов
эквивалентными элементами, показатели безотказности которых
рассчитывают в общем случае по формулам:
k
PЭ ( t ) Pi ( t ) ;
i 1
59
Э t
dPЭ
,
PЭ t dt
1
где Pi(t) — вероятность безотказной работы каждого i-го элемента в
группе из k последовательно соединенных элементов.
Показатели надежности системы (объекта) в целом при наличии
раздельного резервирования рассчитывают с использованием
соответствующих показателей резервируемых элементов (в том числе
и эквивалентных) по формулам для основного соединения. Поэтому в
дальнейшем рассматривается вывод расчетных формул лишь для
показателей надежности резервированного элемента.
Рис. 5.1. Структурные логические схемы расчета
надежности структурного резервирования: а — общее
постоянное резервирование; б — раздельное постоянное
резервирование; в — общее резервирование замещением;
г — скользящее резервирование с дробной кратностью
Эти формулы выводятся в основном в предположении
экспоненциального распределения отказов. Если для конкретных
60
объектов имеет место другой закон распределения, полученные
расчетные выражения дают несколько заниженные значения
показателей надежности.
§ 5.2. Постоянное структурное резервирование без восстановления
Расчетная структурно-логическая схема для рассматриваемого
варианта изображена на рис.5.2. Она соответствует параллельному
включению n элементов, из которых
один является основным и (n–1) —
резервными. Такая группа может
безотказно работать до тех пор,
пока работоспособен хотя бы один
элемент.
Отказ
группы
(резервированного
элемента)
наступает
при
отказе
всех
элементов. Режим работы всех
Рис.5.2.
Структурная элементов одинаковый и работают
логическая
схема они одновременно.
резервированного элемента с
Определим
среднюю
постоянным
включением наработку
до
отказа
резерва
резервированного
элемента
(группы в целом). Считаем, что все
элементы равнонадежные и их отказы распределяются по
экспоненциальному закону. При этом заданная интенсивность
отказов каждого из них равна .
Случайный процесс функционирования резервированного
элемента можно проиллюстрировать графически (рис.5.3). Первый
отказ одного из элементов группы наступит через случайный
промежуток времени t1. В течение этого времени группа
функционирует в полном составе, и параметр экспоненциального
закона распределения составляет n. Второй отказ в группе наступит
через случайное время t2, в течение которого в работе находятся n–1
элементов. Основной параметр распределения при этом (n–1). Отказ
последнего элемента наступит через время tn после предыдущего
отказа с параметром .
В общем случае случайные промежутки времени ti между
любыми смежными (i–1)-м и i-м отказом распределены по
61
экспоненциальному закону
математическое ожидание
с
параметром
(n–i+1)
и
имеют
1
.
( n i 1 )
M ti
Рис.5.3. Случайный процесс функционирования
резервированного элемента с постоянным резервированием.
Отказ группы в целом наступает после отказа последнего n-го
элемента через случайное время после начала работы .
n
ti .
i 1
Средняя наработка до отказа резервированного элемента T1p
определится как математическое ожидание случайной величины .
n
n
1
i 1 ( n i 1 )
T1 p M M ti
i 1
или
T1 p
n
1
1
,
T
1
i 1 n i 1
n
i
1
i 1
1
n
(5.1)
где T1 — средняя наработка до отказа одного элемента.
Определим вероятность безотказной работы группы Pp(t) для
общего случая, когда элементы могут быть неравнонадежными и их
отказы распределяются по любому произвольному закону. Для
каждого элемента известна вероятность безотказной работы Pi(t).
62
При работе группы возможны следующие события: В — группа
в течение времени t работоспособна, т.е. работоспособен хотя бы
один элемент; B — группа в течение времени t отказала в целом, т.е.
отказали все n элементов; Аi — i-й элемент в течение времени t
работоспособен; Ai — i-й элемент в течение времени t отказал.
Связь между этими событиями можно выразить как
n
B Ai ;
i 1
n
B Ai .
i 1
Поскольку как события Аi, так и события Ai являются
совместными и независимыми, то для нахождения Pp(t)=P(B) проще
определить вероятность противоположного события — отказа группы
Qp(t)=P( B ), а затем найти и Pp(t).
В соответствии с теоремой умножения вероятностей, гласящей о
том, что вероятность произведения независимых событий равна
произведению вероятностей этих событий
n
n
i 1
i 1
Q p ( t ) P ( B ) P ( Ai ) ( 1 Pi ( t )) .
Отсюда
n
Pp ( t ) 1 Q p ( t ) 1 ( 1 Pi ( t )) ,
(5.2)
i 1
что соответствует общему случаю расчета вероятности безотказной
работы группы с параллельным соединением элементов.
Для равнонадежных элементов
Pp ( t ) 1 ( 1 P1 ( t ))n ,
(5.3)
где P1(t) — вероятность безотказной работы одного элемента.
Для равнонадежных элементов при экспоненциальном
распределении отказов
Pp ( t ) 1 ( 1 e
63
t
)n .
(5.4)
При n=2 — дублирование
Pp ( t ) 2e
t
e
2 t
.
(5.5)
§ 5.3. Включение резерва замещением
В структурную логическую схему для случая такого
резервирования (рис.5.4) входит один основной элемент,
находящийся в работе, и (n–1) элементов, находящихся в
ненагруженном резерве. Резервные элементы включаются в работу по
мере
отказов
основного
мгновенно. Отказ n-го элемента
приводит к общему отказу
группы. Принимаем, что все
элементы
равнонадежны
(i==const), а переключающее
устройство
абсолютно
безотказно.
Рассмотрим
Рис.5.4. Структурная логическая
случаный
процесс
схема расчета надежности с
функционирования
группы
резервированием замещением
(рис.5.5).Через
случайный
промежуток времени t1 после
начала работы группы происходит отказ основного элемента (1-й
отказ в группе). Вместо него без перерыва в работе подключается
один из резервных, который так же отказывает через случайный
промежуток времени t2 (2-й отказ в группе). Подключается
следующий резервный элемент и т.д. до отказа n-го (последнего)
элемента (общий отказ группы).
Рис.5.5. Случайный процесс функционирования группы
64
с резервированием замещением
Случайное время работы группы до ее отказа
n
ti ,
i 1
а среднее время ее безотказной работы
n
T1 p M M ti ,
i 1
где M — математическое ожидание времени безотказной работы
группы; M t i — математическое ожидание случайной величины —
времени работы группы между отказами основного элемента.
С учетом Mti = 1/
T1 p
n
nT1 ,
(5.6)
где T1 — средняя наработка на отказ одного элемента.
Определим вероятность безотказной работы группы Pp(t) в
течение времени t. Группа будет работать безотказно, пока имеет
место хотя бы одно из несовместных событий Аi: А0 — нет ни одного
отказа в группе; А1 — отказ одного элемента, А2 отказ второго
элемента и т.д. до Аn-1 отказ (n–1)-го элемента. Cобытие B,
соответствующее безотказной работе группы в течение времени t,
n 1
B Ai .
i 0
Отсюда по теореме сложения вероятностей
n 1
n 1
i 0
i 0
Pp ( t ) P ( B ) P ( Ai ) P ( Ai ) .
65
Вероятность того, что элемент за время t отказывает ровно i раз
(при условии его мгновенной замены резервными) определяется по
закону Пуассона.
P ( Ai ) P( k i )
( t )i
i!
exp( t ) ,
где k — случайное число отказов за время t.
Таким образом, вероятность безотказной работы при условии
резервирования основного элемента замещением определится
формулой
n 1 ( t )i
t
.
(5.7)
Pp ( t ) e
i
!
i 0
Для случая дублирования
Pp ( t ) ( 1 t )e t .
(5.8)
§ 5.4. Скользящее резервирование
В расчетную структурно-логическую схему объекта для общего
случая скользящего резервирования (рис.5.6) входят m основных
однотипных элементов и n резервных (m>n). Все элементы
равнонадежные. Закон распределения отказов экспоненциальный.
При отказе любого из основных элементов на его место включается
один из резервных. Отказ объекта происходит при (n+1)-м отказе в
основной цепи.
Рис.5.6. Структурная логическая схема объекта со
скользящим резервированием
66
Рассмотрим два возможных варианта: резервные элементы
находятся в нагруженном режиме и резервные элементы в
ненагруженном режиме.
Нагруженный резерв. Средняя наработка до отказа такой
резервированной
группы
может
быть
найдена способом,
рассмотренным в двух предыдущих параграфах.
Приведем расчетную формулу без вывода:
T1 p
n
1
1
,
T
1
i 0 m i
m
i
i 0
1
n
(5.9)
где и T1 соответственно интенсивность отказов и средняя
наработка до отказа одного элемента. Определим вероятность
безотказной работы резервированной группы Pp(t) в течение времени
t. Группа работает безотказно пока имеет место хотя бы одно из
событий Аi: A0 все элементы в группе работоспособны; A1
отказал один любой элемент, n+m–1 элементов работоспособны; A2
отказали два любых элемента, n+m–2 элементов работоспособны и
т.д.; An отказали n любых элементов, m элементов
работоспособны. Число различных вариантов этих событий равно
C mi n
( m n )!
.
i! ( m n i )!
(5.10)
Событие B безотказная работа группы в течение времени t
n
B Cmi n Ai .
i 0
Вероятность безотказной работы резервированной группы
(вероятность события B) можно определить на основании теоремы
сложения вероятностей для несовместных событий:
n
Pp ( t ) P ( B ) ( Cmi n P ( Ai )) ,
i 0
67
(5.11)
где P ( Ai ) вероятность события Ai , которая может быть
рассчитана на основании теоремы умножения вероятностей для
независимых событий.
P( Ai ) ( 1 P( t ))i ( P( t ))n m i ;
(5.12)
где P(t) вероятность безотказной работы одного элемента.
Рассмотрим частный случай скользящего резервирования с
нагруженным резервом мажоритарное резервирование, часто
используемое в объектах дискретного действия. При мажоритарном
резервировании вместо одного элемента (канала), требуемого для
обеспечения правильного функционирования объекта, включаются
параллельно несколько идентичных элементов (каналов), выходы
которых подаются на специальное (мажоритарное) устройство. Его
задачей является передача такого сигнала, который поступает с
выходов большинства элементов резервированной группы. При этом
из цепи исключаются ложные сигналы, поступающие с выходов
отказавших элементов.
Наибольшее
распространение
получило
мажоритарное
резервирование по принципу «два из трех», когда резервированная
группа состоит из трех элементов, и во внешнюю цепь передается
сигнал, совпадающий с одинаковыми сигналами не менее двух
элементов. Условием безотказной работы группы при этом является
безотказная работа любых двух элементов из трех, а также
мажоритарного устройства в течение заданного времени t. Подставив
в формулы (5.10) - (5.12) значения m=2 и n=1, а также учитывая
вероятность безотказной работы мажоритарного устройства Pm(t),
получим расчетную формулу для вероятности безотказной работы
группы с мажоритарным резервированием по принципу «два из
трех»:
Pp ( t ) Pm ( t )( 3P 2 ( t ) 2 P 3 ( t )) ,
(5.13)
где P(t) вероятность безотказной работы в течение времени t
одного элемента (канала).
Ненагруженный резерв. В этом случае элементы, находящиеся
в резерве, отказывать не могут. В работе постоянно m элементов с
суммарной интенсивностью отказов m. Отказ группы наступает при
отказе (n+1)-го элемента.
68
Анализируя поток отказов так же, как и в предыдущих случаях,
получаем расчетную формулу для определения средней наработки до
отказа резервированной группы в виде
n 1 n 1
(5.14)
T1 .
m
m
Вероятность безотказной работы группы в течение времени t по
аналогии с выражением (5.7)
T1 p
Pp ( t ) e
m t
( m t )i
.
i!
i 0
n
(5.15)
§ 5.5. Комбинированный резерв
На практике для обеспечения повышения надежности объектов
и исключения возможности нарушения непрерывности их работы
обычно применяют комбинированное
резервирование. Рассмотрим методику
расчета показателей надежности для
таких случаев на примере элемента,
имеющего постоянное резервирование
одним
нагруженным
элементом
(дублирование),
и
резервирование
замещением одним ненагруженным
элементом (рис.5.7). При отказе одного
из элементов дублированной группы на
Рис.5.7. Структурная
логическая схема объекта с его место подключается элемент,
находящийся в резерве. Случайный
комбинированным
процесс функционирования группы
резервированием
показан на рис.5.8.
От начала работы до момента времени первого отказа t1 группа
функционирует в полном составе. На интервале времени t2 от
момента первого до момента второго отказа функционирует лишь
дублированная группа, ненагруженный резерв отсутствует. На
интервале времени t3 от момента второго отказа до момента третьего
функционирует один элемент. В момент времени t наступает отказ
объекта (общий отказ группы), который совпадает с третьим отказом.
69
Рис.5.8. Случайный процесс функционирования
группы с комбинированным резервированием
Обозначим случайные отрезки времени t1+t2 = x и t3 = y. Тогда
случайное время от включения до отказа группы (реализацию
случайной величины T ) можно представить как t = x + y.
Вероятность безотказной работы резервированной группы
можно определить по виду функции распределения случайной
величины T. Для ее нахождения нужно знать функции распределения
случайных величин X и Y F1( x ) и F2 ( y ) .
F1( x ) P ( X x ) 1 P ( X x ) .
Вероятность P(X > x), т.е. вероятность того, что случайный
промежуток времени от момента включения объекта до момента
отказа второго элемента (случайная величина X) превысит
фиксированное значение x может быть определена как вероятность
того, что на интервале времени x произойдет не более одного отказа.
В соответствии с законом Пуассона при условии, что на интервале x
возможны отказы двух элементов дублированной группы с
интенсивностью 2
P ( X x ) 2 x exp( 2 x ) .
(5.16)
Отсюда функция распределения случайной величины F1 (x) и
плотность распределения f1 (x) равны
F1(x) = 1–2x exp(–2 x);
(5.17)
f1(x) = 4 2 x exp(–2 x).
(5.18)
Функция распределения случайной величины Y
F2(y) = P(Y < y) = 1–P(Y > y).
70
Вероятность P(Y > y), т.е. вероятность того, что случайный
промежуток времени от момента второго отказа до наступления
третьего (случайная величина Y) превысит фиксированное значение y,
может быть определена как вероятность того, что на фиксированном
промежутке y не произойдет ни одного отказа. С учетом того, что на
этом промежутке времени функционирует один элемент с
интенсивностью отказов ,
F2(y)= 1 – exp (– y);
(5.19)
f2 (y) = exp (– y).
(5.20)
Плотность распределения случайной величины T = X+Y находится
как свертка плотностей f1 (x) и f2(y):
t
t
f 3 ( t ) f1 ( x ) f 2 ( t x )dx 4 exp( t ) x exp( x )dx
3
0
0
(5.21)
4 ( t ) exp( 2 t ) t exp( 2 t )) .
Напоминаем, что в математике сверткой двух функций f1(x) и
f2(x) по интервалу (ab) называется функция вида
b
b
f(z)= f1( z x ) f 2 ( x )dx f 2 ( z x ) f1( x )dx .
a
(5.22)
a
Из теории вероятностей известно, что плотность распределения
суммы случайных величин X и Y (X+Y=T) представляет собой свертку
их плотностей распределения при t = z.
Из выражения (5.22) в соответствии с формулой (3.13) получим
t
t
0
Pp ( t ) f 3 ( t )dt 1 f 3 ( t )dt
.
(5.23)
4 exp( t ) ( 3 2 t ) exp( 2 t ) .
Средняя наработка до отказа резервированной группы в
соответствии со случайным процессом ее функционирования
71
T1 p
1
1 1 2
2T1 ,
2 2
(5.24)
где T1 средняя наработка до отказа одного элемента.
§ 5.6. Структурное резервирование с восстановлением
Резервирование, при котором возможно восстановление
отказавших элементов, является наиболее эффективным способом
повышения надежности изделий. Отказы резервированной группы с
восстановлением возможны лишь в тех маловероятных случаях, когда
отказали и находятся в процессе восстановления все составляющие ее
элементы. Эффект повышения надежности определяется постоянным
пополнением резерва восстанавливаемыми элементами.
Наиболее распространенными методами расчета надежности
восстанавливаемых изделий являются методы, основанные на
использовании классической теории вероятностей; теории массового
обслуживания; теории графов.
Первый метод наиболее общий и может использоваться при
расчете показателей надежности объектов с любыми законами
распределения
времени
безотказной
работы
и
времени
восстановления элементов. Идея метода заключается в составлении
уравнения вида
t
Pm 1( t ) Pm ( t ) m ( t x )dPm ( x ),
(5.25)
0
где Pm 1( t ) вероятность безотказной работы резервированной
группы с восстановлением, состоящей из одного основного и m
ненагруженных резервных элементов; m ( t x ) функция,
удовлетворяющая интегральному уровню Вольтерра второго рода
t
m ( t ) m 1( t ) G( x ) m ( t x )d m 1( x ) :
0
72
(5.26)
где G(x) функция распределения времени восстановления.
В общем случае решение уравнений (5.25) и (5.26) возможно
лишь приближенными методами и представляет собой достаточно
сложную задачу. Для некоторых частных случаев, например, при
условии экспоненциального распределения времени безотказной
работы и восстановления элементов использование этого способа
нецелесообразно.
Метод, основанный на использовании теории массового
обслуживания, рассмотрим на примере дублированной группы с
постоянным нагруженным резервом (рис.5.9).
Принимаем
следующие
допущения:
все
элементы
равнонадежны, закон распределения
отказов элементов экспоненциальный
с интенсивностью отказов ; закон
восстановления
элементов
экспоненциальный с интенсивностью
восстановления ; одновременное
восстановление обоих
элементов
Рис.5.9. Структурная
невозможно. Отказавший в процессе
логическая схема
работы
группы
элемент
дублированной группы
незамедлительно
подвергается
восстановлению в течение случайного промежутка времени и снова
включается в работу.
Отказ группы наступает в случае, когда во время
восстановления одного из элементов откажет второй.
В течение рассматриваемого промежутка времени t возможны
следующие состояния объекта: S1 — работоспособны оба элемента;
S2 — один элемент работоспособен, второй восстанавливается; S3 —
оба элемента неработоспособны (общий отказ).
Процесс возможных переходов из состояния в состояние
случайный марковский, поскольку вероятность попадания через
некоторый промежуток времени t в любое состояние зависит только
от того, в каком состоянии объект находится в рассматриваемый
момент времени.
Для большей наглядности рассматриваемого метода представим
описание такого процесса в виде графа состояний (рис.5.10).
73
Определим вероятности перехода объекта из состояния в
состояние для малого промежутка времени (шага) t ( t t ) t
при t = const. При этом рассмотрим следующие возможные
ситуации.
1. Объект в момент времени t находится в состоянии S1.
Вероятность P11(t) остаться в этом состоянии соответствует
вероятности безотказной работы обоих элементов за промежуток
времени t
P11 ( t ) e
2 t
(5.27)
Рис.5.10.Граф состояний для дублированной группы с
восстановлением
или при t1 c учетом выражения (4.10)
P11 ( t ) 1 2 t .
(5.28)
Вероятность P12(t) перехода в состояние S2 соответствует
вероятности отказа одного из элементов за промежуток времени t.
P12 ( t ) 1 e 2t 2 t .
(5.29)
2. Объект в момент времени t находится в состоянии S2.
Вероятность P23(t) перехода объекта в состояние S3
соответствует вероятности отказа одного (работающего) элемента за
промежуток времени t при одновременном невосстановлении
второго.
74
P23 ( t ) t ( 1 t ) t .
(5.30)
Вероятность P21(t) перехода объекта
в состояние S1
соответствует вероятности восстановления элемента за промежуток
времени t при безотказной работе второго.
P21( t ) t ( 1 t ) t .
(5.31)
Вероятность P22(t) остаться в этом состоянии соответствует
вероятности
безотказной
работы
одного
элемента
при
одновременном отсутствии восстановления другого за промежуток
времени t или вероятности отказа одного элемента при
восстановлении другого.
P22 ( t ) ( 1 t )( 1 t ) 1 ( )t .
(5.32)
3. Объект в момент времени t находится в состоянии S3.
Поскольку это состояние представляет собой общий отказ
объекта без последующего его восстановления, то оно является для
объекта поглощающим и P33(t)=1.
Представим граф состояний с учетом полученных значений
вероятностей перехода (рис.5.11).
Рис.5.11. Расчетный граф состояний для дублированной
группы с восстановлением
В любой момент времени t объект находится в одном из трех
возможных состояний, т.е.
75
P1( t ) P2 ( t ) P3 ( t ) 1.
(5.33)
Поскольку состояние S3 поглощающее, вероятность безотказной
работы объекта в течение времени t
Pp ( t ) P1 ( t ) P2 ( t ) ,
(5.34)
Q p ( t ) P3 ( t ) .
(5.35)
а вероятность отказа
Определим вероятности Pi(t+t) пребывания объекта в i-м
состоянии в момент времени t+t в зависимости от вероятностей Pi(t)
в момент времени t и вероятностей перехода за промежуток времени
t (i=1,2,3).
Объект может находиться в момент времени t + t в состоянии
S1, если он в момент времени t находился в этом состоянии и за
промежуток времени t из него не вышел, или же, если он находился
в момент времени t в состоянии S2 и за промежуток времени t
перешел в состояние S1.
На основании теорем умножения и сложения вероятностей
можно записать
P1( t t ) P1( t )( 1 2 t ) P2 ( t ) t .
(5.36)
Рассуждая аналогичным образом, получим
P2 ( t t ) P2 ( t )( 1 ( ) t ) P1( t )2 t ;
(5.37)
P3 ( t t ) P3 ( t ) P2 ( t ) t .
(5.38)
В уравнениях (5.36) – (5.38) перенесем Pi(t) в левую часть,
разделим обе части на t и перейдем к пределу при t0.
Из уравнения (5.36) при этом получим
lim
t 0
P1( t t ) P1( t )
t
76
2 P1( t ) P2 ( t ) ;
P1( t ) 2 P1( t ) P2 ( t ) .
(5.39)
Аналогично из уравнений (5.37) и (5.38)
P2( t ) 2P1( t ) ( )P2 ( t ) ;
(5.40)
P3( t ) P2 ( t ).
(5.41)
Полученную систему линейных дифференциальных уравнений с
постоянными коэффициентами (5.39) – (5.41) решаем для начальных
условий P1(0)=1; P2(0)=P3(0)=0, используя преобразование Лапласа.
Система уравнений (5.39) – (5.41) в изображениях по Лапласу
примет вид
sP1 ( s ) 1 2 P1 ( s ) P2 ( s );
sP2 ( s ) 2 P1 ( s ) ( )P2 ( s );
sP3 ( s ) P2 ( s ),
(5.42)
где Pi(s) — преобразование (изображение) Pi(t) по Лапласу; s —
оператор преобразования.
Решение полученной системы алгебраических уравнений
относительно P3(s) дает
22
A
.
P3 ( s )
2
2
sB
s( s ( 3 )s 2 )
1
(5.43)
Для нахождения оригинала функции P3 ( t ) используем формулу
разложения Хевисайда в виде
P3 ( t )
A( 0 ) n A( sk )
exp( sk t ) ,
B1( 0 ) k 1 sk B1( sk )
(5.44)
где s k корни полинома B1; n число корней.
Подставляя в нее соответствующие значения из выражения
(5.43), получим расчетную формулу для определения вероятности
безотказной работы резервированной группы в течение времени t
77
Pp ( t ) 1 P3 ( t )
ab
1
exp( ( b a )t )
2a
2
ab
1
exp( ( a b )t ) ,
2a
2
(5.45)
где a 2 6 2 ; b = + 3.
Средняя наработка резервированной группы до отказа
T1 p Pp ( t )dt
0
3
.
22
(5.46)
При соотношениях 0,01, характерных для элементов с
высокой степенью безотказности, вместо точной формулы (5.45)
можно пользоваться приближенным выражением
Pp ( t ) exp( t / T1 p ) .
(5.47)
Для определения коэффициента готовности объекта следует
рассматривать возможность включения объекта в работу и после
общего отказа, т.е. не считать состояние S3 поглощающим. Тогда к
графу, показанному на рис.5.10 и 5.11, добавятся ветви с
операторами, соответствующими вероятностям перехода объекта из
состояния S3 в состояние S2 (после восстановления одного элемента
за промежуток времени t) — P32(t) и продолжения оставаться в
состоянии S3 — P33(t).
P32 ( t ) t ;
(5.48)
P33 ( t ) 1 t .
(5.49)
Составление системы уравнений, описывающих такой граф,
производится аналогично рассмотренному выше принципу, но для
стационарного марковского процесса, т.е. при Pi(t) = Pi = const и
Pi( t ) 0 (по правилу, приведенному в § 2.6).
78
P2 P1 2 0 ;
P1 2 P2 P2 P3 0 ;
P2 P3 0.
(5.50)
Система алгебраических уравнений (5.50) имеет бесконечное
число решений, поскольку все правые части равны нулю. Заменим
одно из уравнений дополнительным условием Pi 1.
P2 2P1 0 ;
P2 P1 0 ;
P1 P2 P3 1.
(5.51)
Решение полученной системы алгебраических уравнений дает
P2 2 MP1 ; P3 2 M 2 P1 ;
1
P1
,
1 2M 2M 2
(5.52)
где M= /.
Отсюда коэффициент готовности объекта
K Гp P1 P2
1 2M
.
2
1 2M 2M
(5.53)
§ 5.7. Расчет надежности с использованием методов теории графов
Использование методов теории графов дает возможность
существенно упростить процедуру составления исходных уравнений,
описывающих состояние и возможные переходы объектов
исследования, сведя ее к формальному приему, описанному в § 2.6.
При этом должны быть заданы или предварительно рассчитаны
вероятности или интенсивности переходов из состояния в состояние.
Вид расчетного графа состояний объекта покажем на примере
рассмотренном в предыдущем параграфе случае дублированной
группы с восстановлением (рис.5.12).
79
Рис.5.12. Граф состояний дублированной
группы с восстановлением
Система уравнений (5.39) – (5.41) по такому графу составляется
следующим образом. В левой части каждого уравнения записывается
производная вероятности соответствующего состояния Pi( t ) , а в
правой — алгебраическая сумма сигналов для рассматриваемого
состояния Si (i-й вершины графа).
Систему уравнений (5.50) для стационарного процесса
переходов получают аналогичным образом, но при условии Pi( t ) 0 .
При этом учитывается возможность восстановления объекта после
его первого отказа (перехода в состояние S3) путем введения
перехода из состояния S3 в состояние S2 с интенсивностью . На
рис.5.12 ветвь, характеризующая такой переход, показана штриховой
линией.
Полученные в результате решения этой системы уравнений
результаты в виде выражений (5.52) и (5.53) справедливы для случая,
когда имеется возможность восстановления на рассматриваемом
промежутке времени лишь одного элемента. Если же предусмотрено
проведение восстановительных операций одновременно по обоим
отказавшим элементам (при наличии, например, двух ремонтных
бригад), задача расчета показателей надежности дублированной
группы с восстановлением существенно упрощается.
Это объясняется тем, что все состояния обоих элементов в этом
случае можно рассматривать как статистически независимые, что
дает возможность рассчитывать коэффициент готовности объекта по
стандартной формуле для параллельного соединения элементов как
n
K ГP 1 ( 1 K Гi ) ,
i 1
где n число элементов группы с постоянным резервированием;
коэффициент готовности каждого i-го элемента
K Гi
резервированной группы.
Для рассматриваемого случая при n = 2 и K Г 1 K Г 2 K Г
80
K ГP 1 ( 1 K Г )2 2 K Г K Г2 .
Или, подставляя выражение KГ из формулы (4.26),получим
K ГP
1 2M
.
2
1 2M M
(5.54)
Если в первоначально рассмотренном примере использовать
ненагруженное резервирование замещением при наличии одной
ремонтной бригады, граф состояний объекта будет отличаться от
графа на рис.5.11 значением вероятности перехода из состояния S1 в
состояние S2
P12 ( t ) t ,
поскольку в работе находится только один элемент. В остальном
процедура
расчета
показателей
надежности
аналогична
рассмотренной выше.
Окончательные результаты получим в виде
Pp ( t )
где c
2
cd
1
cd
1
exp( ( d c )t )
exp( ( c d )t ) ,
2c
2
2c
2
(5.55)
4 ; d = + 2.
2
;
2
(5.56)
1 M
.
1 M M 2
(5.57)
T1 p ( t )
K Гp
Формула (5.57) справедлива при наличии одной ремонтной
бригады.
§ 5.8. Принципы расчета структурно-сложных систем
Современные электротехнические системы относятся к
категории структурно-сложных. Характерным признаком таких
систем является зависимость их безотказности как от надежности
81
элементов, так и от вида их логических структурных связей. При этом
отказ системы зависит не только от числа отказавших элементов, но и
от места их расположения в общей структуре.
При расчетах надежности выделяют три основные типа
структурно-сложных систем: с последовательно-параллельными
связями, со связями мостикового типа и с перекрестными связями.
В общем случае оценка их надежности осуществляется
следующим образом. Если система состоит из n элементов, каждый
из которых может находиться в одном из двух состояний
(работоспособном или неработоспособном), то общее число ее
возможных состояний составляет 2n . Это множество состояний
разбивается
на
два
подмножества:
работоспособное
и
неработоспособное, после чего рассчитываются вероятности
пребывания системы в работоспособных состояниях и вероятность ее
безотказной работы. Однако реализация такого метода на практике
связана со значительными трудностями, в частности, при выделении
работоспособных и неработоспособных состояний. Поэтому обычно
используют методы, заключающиеся в преобразовании структуры
исследуемой системы к более простым видам, для которых возможно
получение удобных аналитических выражений показателей
надежности.
Так, например, при расчете надежности системы с
последовательно-параллельной структурой весьма эффективным
является метод свертки, который основан на последовательном
эквивалентном объединении групп элементов с последовательным и
параллельным соединением с целью приведения исходной структуры
к схеме с основным соединением эквивалентных элементов. При этом
используют расчетные выражения, рассмотренные в § 4.2 и § 5.2,
например, (4.1) и (5.2).
Упрощение связей мостикового типа производят обычно с
использованием метода преобразования «треугольника» в «звезду» и
обратно. На рис.5.13 приведен типовой фрагмент логической
структурной схемы мостикового типа, из которого видно, что
элементы 1,3,5 образуют «треугольник», а элементы 1,2,5 — «звезду».
82
Рис.5.13 Мостиковое соединение элементов
Определим основные показатели надежности рассматриваемых
структур при их преобразовании. При этом в качестве показателей
безотказности будем использовать вероятности отказов элементов q i ,
считая их значения для участков схемы между одноименными
точками в различных структурах одинаковыми.
Рассмотрим точки 1 и 2 на рис.5.14. Вероятности отказа для
цепей при условии, что точка 3 при преобразовании будет
присоединена к точке 2 соответственно равны: для схемы ―звезда‖
q1 q2 q3 q1q2 q3 ; для схемы ―треугольник‖ q12 q31 . При условии
эквивалентного по надежности преобразования ―звезды‖ в
―треугольник‖ справедливо равенство
q1 q2q3 q1q2q3 q12q31 ,
из которого, пренебрегая произведениями вероятностей отказа, как
величинами более высокого порядка малости, чем q i , получаем
приближенное соотношение
q1 q12q31 .
Аналогично можно записать равенства и для других возможных
вариантов соединения точек:
q 2 q3 q1 q 2 q3 q1 q 23 q12 ;
q3 q1q2 q3q1q2 q31q23 ;
В итоге получим следующие приближенные выражения:
83
q1 q12q31 ; q2 q23q12 ; q3 q31q23 ,
(5.58)
из которых следует
q12
q1q 2
; q 23
q3
q 3 q1
q 2 q3
; q 31
.
q1
q2
(5.59)
Рис.5.14. Схемы ―звезды‖ и ―треугольника‖
Процесс преобразования мостиковой структуры производится
следующим образом. При переходе от ―звезды‖ к ―треугольнику‖
выделяют три элемента, соединенные по схеме ―звезда‖, и размечают
точки 1, 2, 3 как показано на рис.5.15. Затем соединяют отмеченные
точки линиями, на которых размещают элементы ―треугольника‖ (на
рис.5.15 эти линии показаны как штриховые). Обозначают элементы
―треугольника‖ по направлению обхода в сторону возрастания
номеров точек.
При переходе от ―треугольника‖ к ―звезде‖ (рис.5.16) выбирают
три элемента, образующие ―треугольник‖ и размечают узловые точки.
Затем обозначают элементы ―треугольника‖ вышеописанным
способом и в его середине фиксируют точку 4, к которой
подсоединяют связи элементов ―звезды‖, обозначая их номерами
узловых точек ―треугольника‖.
Вероятности отказов элементов полученных эквивалентных по
надежности схем рассчитывают по формулам (5.58), (5.59).
84
Рис.5.15. Преобразование
―звезды‖ в ―треугольник‖
Рис.5.16 Преобразование
―треугольника‖ в ―звезду‖
Целью таких преобразований является приведение схем с
узлами мостикового типа к схемам последовательно-параллельным с
последующей их сверткой.
Расчет структурно-сложных систем с восстановлением может в
общих случаях производиться логико-вероятностными методами,
важная роль в разработке которых принадлежит И.А.Рябинину,
Г.Н.Черкесову и А.С.Смирнову [13,14].
Глава 6.
ИСПЫТАНИЯ НА НАДЕЖНОСТЬ
§ 6.1. Значение и виды испытаний на надежность
На разных этапах изготовления технических устройств
производятся их испытания, цель которых заключается в
экспериментальной
проверке
соответствия
фактических
характеристик установленным техническим требованиям. Частью
таких
испытаний
являются
испытания
на
надежность,
обеспечивающие получение информации о свойствах надежности
изготавливаемых изделий, их составных частей, узлов и деталей.
Основная задача испытаний на надежность — получение
количественной оценки показателей надежности испытуемых
объектов. Получаемые результаты используются для проверки
изделий на соответствие установленным для них требованиям по
85
надежности, для корректировки проектной и рабочей документации,
а также для проектирования аналогичных и более сложных устройств,
в состав которых входят испытуемые объекты.
Второй не менее важной задачей является выявление и анализ
причин отказов и повреждений и разработка мероприятий по их
устранению.
Сложные восстанавливаемые изделия единичного или
мелкосерийного производства подвергаются испытаниям на
надежность в индивидуальном порядке. В условиях крупносерийного
и массового производства испытаниям подвергается некоторая
выборка из генеральной совокупности (партии) одинаковых изделий,
изготовленных в едином технологическом процессе. Режим
испытаний должен соответствовать или быть максимально
приближенным
к
реальным
условиям
эксплуатации,
транспортирования или хранения (в зависимости от вида
определяемых показателей надежности) испытуемых объектов.
В результате испытаний фиксируется так называемая первичная
статистика
результаты наблюдений: продолжительность
нахождения каждого объекта в работоспособном состоянии; моменты
возникновения отказов, их характер и причины; продолжительность
восстановления; моменты перехода в предельное состояние и пр.
Стандартами на испытания с целью сокращения их
продолжительности
допускается
искусственное
ускорение
испытательного процесса во времени за счет ужесточения одного или
нескольких основных воздействующих факторов по сравнению с их
расчетными значениями. Для электротехнических устройств такими
факторами являются температура, влажность и вибрация.
При имитации эксплуатационных условий испытания проводят,
как правило, в циклическом режиме, когда в течение ряда
одинаковых повторяющихся промежутков времени (циклов) к
объектам прикладываются одновременно или последовательно
установленные программой испытаний воздействия с фиксацией
результатов наблюдений за их состоянием по завершении каждого
цикла. Перевод продолжительности испытаний в циклах в
физическое время производится с учетом коэффициента ускорения
испытаний, рассчитываемого в соответствии со степенью
ужесточения воздействующих факторов. При этом должны быть
известны
(или
предварительно
получены)
зависимости
контролируемых показателей надежности от изменения этих
факторов.
86
По целевой направленности испытания на надежность
подразделяются на определительные, контрольные и специальные.
Определительные
испытания
проводятся
с
целью
установления фактического уровня надежности испытуемых объектов
на базе получаемых статистических оценок показателей надежности.
Контрольные испытания проводятся с целью проверки
соответствия фактического уровня надежности испытуемых объектов
требуемому путем сравнения получаемых статистических оценок
некоторых показателей надежности с установленными технической
документацией значениями. При этом могут использоваться и
косвенные показатели такие, например, как число отказов в
испытуемой выборке за установленное время, продолжительность
безотказной работы всех изделий выборки и т.п. Объем и
трудоемкость
контрольных
испытаний
меньше,
чем
определительных.
Специальные испытания проводятся с целью исследования
характера и степени влияния на надежность некоторых явлений или
факторов, а также конструктивных, схемных или технологических
решений при их вариантной проработке или вносимых изменениях.
Характерной особенностью испытаний на надежность является
то, что по результатам наблюдений показатели надежности получают
в виде статистических оценок, а не их истинных значений. Это
объясняется ограниченностью числа наблюдений (ограниченностью
выборки испытуемых объектов). Рассчитываемые по результатам
испытаний
показатели
носят
название
выборочных,
или
эмпирических. Их значения получают в виде точечных или
интервальных оценок.
Точечные оценки представляют собой числовые характеристики
положения случайных величин, каковыми и являются определяемые
показатели надежности. Наиболее распространенными точечными
оценками являются выборочное среднее и дисперсия, определяемые
по формулам (2.13) и (2.14). Расчетные формулы для определения
точечных оценок основных показателей надежности по результатам
наблюдений приведены в гл.3.
Интервальные оценки. Точечные оценки показателей
надежности не дают возможности судить о точности и достоверности
получаемых результатов, т.е. о степени их отличия от истинных
значений.
87
Если обозначить полученную точечную оценку показателя
надежности , а допускаемую при этом погрешность , то истинное
значение исследуемого показателя 0 должно находиться в интервале
0 .
(6.1)
Поскольку величина является случайной, точные границы
этого интервала установить невозможно. Их определяют с некоторой
заранее принятой вероятностью доверительной вероятностью,
которая представляет собой вероятность того, что интервал в
установленных границах накроет истинное значение исследуемого
показателя.
P( H 0 B ) ,
(6.2)
где H , B соответственно нижняя и верхняя границы, в пределах
которых находится истинное значение исследуемого показателя.
Границы такого интервала, установленные с доверительной
вероятностью , называются доверительными границами, а сам
интервал доверительным интервалом.
Доверительный интервал характеризует величину ошибки при
оценке показателя надежности, доверительная вероятность
достоверность оценки. Наиболее часто величину доверительной
вероятности выбирают из ряда чисел 0,8; 0,9; 0,95; 0,99; 0,995; 0,999.
Вероятность того, что доверительный интервал не накроет
истинное значение исследуемого показателя, называется уровнем
значимости .
P( H 0 B ) 1 .
(6.3)
Если требуется установить лишь одну из границ доверительного
интервала нижнюю или верхнюю (односторонний интервал),
задаются соответственно доверительный вероятностью 1 или 2 , где
1 P( 0 H );
(6.4)
2 P( 0 B ) .
(6.5)
88
Вероятности , 1 , 2 связаны между собой соотношением
1 2 1.
(6.6)
При определении доверительных границ широко используются
методы квантилей. Квантилем в теории вероятностей называется
числовое значение такой величины x p , для которой выполняется
условие
F( xp ) p,
где
F ( x p ) P( X x p )
функция распределения случайной
величины X, а p заданное значение вероятности.
Значения квантилей для наиболее распространенных законов
распределения случайных величин табулированы в зависимости от
величины p и числа наблюдений n. В некоторых случаях квантили
рассматривают из условия
P( X x p ) 1 p q .
Использование методов квантилей требует априорного знания
или предварительного определения закона распределения по
результатам испытаний.
§ 6.2 Определение вида закона распределения
Предварительно установить вид закона распределения можно
путем сравнения полученных экспериментальных временных
зависимостей
показателей
надежности
с
аналогичными,
характерными для определенных законов распределения. (Подобные
типовые характеристики для экспоненциального и нормального
распределения приведены на рис.2.3 и 2.4).
Подтверждение
соответствия
фактического
закона
распределения предварительно выбранному виду может быть
получено с использованием так называемых критериев согласия
(Колмогорова, Пирсона, Мизеса и др.).
Наиболее удобным для практического применения является
критерий согласия Колмогорова. Он предусматривает использование
в качестве меры расхождения между теоретической (F(x)) и
89
статистической ( Fˆ ( x )) функциями
максимального расхождения
D F ( x ) Fˆ ( x )
max
распределения
модуля
их
.
А.Н.Колмогоров доказал, что при неограниченном возрастании
числа независимых наблюдений n вероятность неравенства
D nw
стремится к пределу
P ( w ) 1 ( 1 )k exp( 2k 2 w ) .
k
Здесь P(w) представляет собой вероятность того, что за счет
чисто случайных причин максимальное расхождение между F(x) и
Fˆ ( x ) будет не меньше, чем практически установленное. Значения P(w)
табулированы.
Гипотезу о соответствии фактического распределения
предполагаемому теоретическому следует отвергнуть, если
вероятность P(w) весьма мала (практически, если P( w ) 0,27 , что
соответствует w=1,0). При этом условие правильности определения
закона распределения имеет вид
D n 1.
(6.7)
Процедура определения вида закона распределения по критерию
согласия Колмогорова следующая:
1. По результатам наблюдений рассчитывают статистические
оценки показателей безотказности в виде Qˆ ( ti ) , fˆ ( ti ) , ˆ ( ti ) по
формулам (3.2), (3.9), (3.11) для i-х моментов времени, ( i 1, n ) .
2. Строят экспериментальные зависимости Qˆ ( t ) , fˆ ( t ) , ˆ ( t ) и
сравнивают их с соответствующими типовыми для наиболее
распространенных
законов
распределения.
Устанавливают
предполагаемый закон распределения.
3. Рассчитывают основные параметры этого предварительно
выбранного закона распределения. Для экспоненциального закона это
90
1
n
n
( ti ) ,
i 1
для нормального T̂1 по формуле (3.15) и выборочное значение
среднеквадратического отклонения s t s t2 , где st2 выборочное
значение дисперсии, рассчитываемое по формуле (2.14) при x = t.
4. По аналитическому выражению функции распределения для
предварительно выбранного закона (для экспоненциального закона
по формуле (2.17), для нормального по формуле (2.24) при x = t,
M x T̂1 , x st ) строят теоретическую функцию распределения F(t) и
сравнивают ее с Qˆ ( t ) . Определяют величину модуля максимального
расхождения D. Величину D можно определять и как модуль
максимального расхождения между характеристиками Pˆ ( t ) и 1 – F(t).
5. В соответствии с выражением (6.7) подтверждают или
отвергают
гипотезу
о
соответствии
фактического
закона
распределения
предварительно
выбранному.
Если
гипотеза
отвергается, производят уточнение предварительно выбранного закона
и процедуру повторяют.
§ 6.3. Точечные оценки показателей надежности по результатам
определительных испытаний
Конечная цель определительных испытаний статистический
расчет показателей надежности исследуемых объектов может быть
достигнута различными путями (планами испытаний). Основные из
них следующие.
1. На испытания ставятся N изделий. Испытания продолжаются
до отказа всех изделий (план NUN).
2. На испытания ставятся N изделий. Отказавшие не
восстанавливаются. Испытания продолжаются либо до заданного
времени T (план NUT), либо до заданного числа отказов r (план NUr).
3. На испытания ставятся N изделий. В процессе испытаний
отказавшие изделия восстанавливаются или заменяются новыми.
Испытания продолжаются либо до заданного времени T (план NRT),
либо до заданного числа отказов r (план NRr).
Наибольший объем информации о надежности исследуемых
объектов дают испытания по плану NUN, так как по их результатам
91
может быть рассчитана статистическая (эмпирическая) функция
распределения для всего времени наработки до отказа.
Статистические точечные оценки показателей надежности Q(t),
P(t), f(t), (t) по всем планам рассчитывают по формулам (3.2), (3.6),
(3.9), (3.11). При проведении испытаний в циклическом режиме
удобнее пользоваться следующими выражениями.
i
Pˆ ( t )
N nk
, ( t ti ) ;
k 1
N
n
fˆ ( t ) i ,
N t
( t ti
ˆ ( t )
ni
i 1
t
n
( N nk i ) t
2
k 1
2
,
(6.8)
);
(6.9)
( t ti
t
),
2
(6.10)
где t продолжительность цикла; t i момент времени
завершения i - го цикла; nk , ni количество объектов, отказавших
соответственно в k - м и i - м циклах испытаний.
Точечная оценка средней наработки до отказа при испытаниях
по плану NUN может быть рассчитана по формуле (3.15), выборочная
дисперсия и среднеквадратическое отклонение времени работы до
отказа относительно его среднего значения по выражениям:
ˆ
st2 ̂ t2 D
t
st ˆ t st2
1
N 1
N
(t
i 1
i
Tˆ1 ) 2 ;
(6.11)
.
(6.12)
Или то же для циклических испытаний при m циклах:
1
Tˆ1
N
s t2
m
n (i t
i 1
i
1
N 1
t
);
2
(6.13)
m
t
i 1
2
ni (( i t
92
) T̂1 ) 2 .
(6.14)
Использование формул (3.15) и (6.11) для обработки
результатов наблюдений при испытаниях по планам с усеченными
выборками (NUT и NUr) может привести к значительным
погрешностям. Оценки T1 и t2 в этих случаях рассчитывают
специальными методами в зависимости от типа плана испытаний и
вида закона распределения.
Если известно или установлено, что закон распределения
отказов испытуемых объектов нормальный, точечные оценки
показателей T1 и t2 по результатам испытаний по планам NUT и NUr
могут быть получены по методу квантилей следующим образом.
Рассчитывают вероятности отказов для зафиксированных моментов
времени t i
q( ti ) 1 p( ti )
n( ti )
,
N
(6.15)
определяют для них квантили нормального распределения u pi из
условия
Fi ( t ) 0 ,5 Ф( u pi ) p( t i )
и составляют r уравнений:
T1 u pi st t i , ( i 1, r ) .
(6.16)
Полученную систему уравнений решают по методу наименьших
квадратов, для чего умножают их левые и правые части на u pi и
складывают. В результате получают первое так называемое
нормальное уравнение
r
r
r
T1 u pi st u2pi u piti .
i 1
Второе нормальное
уравнений системы (6.16):
i 1
уравнение
93
(6.17)
i 1
получают
суммированием
r
r
i 1
i 1
rT1 st u pi ti .
(6.18)
Уравнения (6.17) и (6.18) решают относительно T1 и st .
Квантили нормального распределения u pi можно найти из
таблицы значений нормированный функции Лапласа (табл.П.1) или
из специально составленной таблицы квантилей нормального
распределения (табл.П.2) при = p.
Если установлено, что закон распределения времени
безотказной работы испытуемых объектов экспоненциальный, для
оценки основного параметра интенсивности отказов в виде
выборочного среднего ˆ рекомендуется использовать формулы,
полученные с помощью метода максимального правдоподобия [3],
которые приведены в табл.6.1.
94
Таблица 6.1
Оценка параметра для экспоненциального распределения
План
испытаний
Расчетные формулы
̂
NUN
N
t
N — число объектов,
поставленных на
испытание;
n(T) — число отказов за
;
N
t t i -i 1
установленное время Т;
t ( r ) — суммарная
n( T )
t ( T ) t i ( N n( t ))T наработка к моменту ri 1
го отказа;
tr — момент времени
r 1
наступления r-го отказа;
ˆ
;
t ( r )
ti — наработка i-го
r
объекта до момента его
t ( r ) t i ( N r )t r
i 1
отказа
ˆ
NUT
NUr
NRT
NRr
Обозначения
n(T )
;-t (T )
n(T )
NT
r 1
ˆ
Nt r
ˆ
§ 6.4. Интервальные оценки показателей надежности при нормальном
законе распределения отказов
Способ расчета интервальных оценок показателей надежности
по результатам определительных испытаний в большой степени
зависит от объема исходной информации. При этом можно выделить
два основных случая: дисперсия времени наработки исследуемых
объектов до отказа ( Dt t2 ) известна заранее, дисперсия заранее
неизвестна. Рассмотрим их.
95
Дисперсия известна. Если случайная величина T
продолжительность безотказной работы распределена по
нормальному закону с известной дисперсией t2 , полученная в
процессе испытаний совокупность наработок до отказа t1 , t 2 ,...,t n , где
n объем испытуемой выборки — может рассматриваться как
совокупность n независимых случайных величин, распределенных
аналогично случайной величине T.
Такой подход основан на следующих рассуждениях. В принципе
каждая величина t i могла бы принять не зафиксированное в
конкретном опыте значение, а любое из тех, что возможны для
величины T. При этом всю совокупность величин ti ( i 1, n ) можно
рассматривать как n различных экземпляров одной и той же
случайной величины T. А поскольку формирование выборки
производится случайным образом, то t i независимые случайные
величины. Их математические ожидания и дисперсии
M t1 M t2 ... M tn Mt T1 ;
Dt1 Dt2 ... Dtn Dt t2 .
В качестве статистической оценки математического ожидания
случайной величины T используется среднеарифметическое значение
ti
T̂1 T 1
1 n
ti ,
n i 1
которое в соответствии с вышерассмотренными рассуждениями
также представляет собой случайную величину. Для определения ее
математического ожидания и дисперсии воспользуемся теоремами
сложения математических ожиданий и дисперсий.
1
M T1 M
n
1
ti
i 1
n
n
96
M t i M t T1 ;
n
i 1
1
DT1 D
n
1 n
t2
t i 2 Dt i .
n
i 1
n i 1
n
Так как случайные величины t i ( i 1, n ) распределены по
нормальному закону, их сумма, а следовательно, и T1 также
t2
распределены по нормальному закону с параметрами T1 и
.
n
Функция распределения T1 в соответствии с выражениями (2.24) и
(2.26) имеет вид
t T1
F ( t ) 0 ,5
n .
t
(6.19)
Подберем по заданной доверительной вероятности (уровню
достоверности) такое число > 0, чтобы выполнялось условие
P ( | T1 T1 | ) ,
(6.20)
которое можно представить в виде
P ( T1 T1 T1 ) .
(6.21)
Левая часть уравнения (6.21) с учетом выражений (2.3) и (6.19)
может быть представлена следующим образом:
n
F ( T1 ) F ( T1 ) 0 ,5
t
.
n
n
2
0 ,5
t
t
(6.22)
Отсюда условие для определения отклонения T1 от его
математического ожидания (ошибки , допускаемой при оценке T1)
примет вид
97
n
.
2
(6.23)
t
Поскольку функция Ф(u) непрерывна и на интервале ( 0 , )
возрастает от 0 до 0,5, то для любого числа 0 < < 1 существует
единственное число u 2 n / t , для которого справедливо
соотношение
( u 2 ) / 2 .
Это
число
u
(6.24)
называется
2
квантилем
нормального
распределения и определяет величину ошибки при заданной
доверительной вероятности как
t
n
u 2 .
Используя это соотношение, преобразуем условие (6.21) к виду
P ( T1
t
n
u
2
T1 T1
t
n
u
2
) ,
из которого следует, что границы доверительного интервала,
накрывающего истинное значение средней наработки до отказа T1 с
доверительной вероятностью , можно рассчитать по формулам
T1H Т 1 u
T1B T1 u
t
2
n
t
2
n
,
;
(6.25)
(6.26)
где T1 T̂1 определяется по результатам эксперимента; n число
наблюдений отказов (для плана NUN n = N, для плана NUT n = n(T),
для плана NUr n = r).
Квантили
нормального
распределения
можно
брать
непосредственно из таблицы значений нормированной функции
Лапласа (табл.П.1) при условии (6.24). Поскольку обычно значения
98
выбирает из стандартного ряда, для отыскания u 2 удобнее
пользоваться не табл.П.1, а ее преобразованным вариантом (табл.6.2)
или табл.П.2 при = p.
Таблица 6.2
Квантили нормального распределения u/2
для стандартных значений
u/2
u/2
0,8
1,28
0,99
2,58
0,9
1,64
0,995
2,81
0,95
1,96
0,999
3,29
Ориентировочная интервальная оценка средней наработки до
отказа при нормальном распределении может быть получена из
приближенного выражения
T1Н , B T̂1 2 t ,
которое позволяет
определить
доверительные границы с
доверительной вероятностью = 0,95.
Дисперсия неизвестна. Подход к решению поставленной
задачи остается таким же, как в вышерассмотренном случае, но на
основе рассчитанной по формуле (2.14) выборочной дисперсии
D t st2 и эмпирической оценки стандарта времени безотказной
работы
̂ t Dˆ t st .
Для рассматриваемой выборки t1 , t 2 ,...,t n T1 и st случайные
величины. Сформируем из них новую случайную величину
t
n (Tˆ1 T1 )
.
st
(6.27)
99
В курсах математической статистики доказывается, что закон
распределения случайной величины такого вида не зависит ни от ее
математического ожидания, ни от ее дисперсии. Функция
распределения случайной величины t называется законом
распределения Стьюдента, или t - распределением с n–1 степенями
свободы.
Для заданной доверительной вероятности мы хотим найти
такое число t , чтобы выполнилось равенство
(T T ) n
P 1 1
t
s
t
.
(6.28)
Формулу (6.28) перепишем, заменяя неравенство для модуля
двойным неравенством
st
P ( T1 t
n
st
T1 T1 t
n
) ,
(6.29)
из которого видно, что интервал
( T1 t
st
n
T1 T1 t
st
n
)
с достоверностью представляет собой доверительный интервал для
математического ожидания T1 (истинного значения T1 ). Отсюда
следует
где
t ( p , f ) t
T1H T1 t ( p , f )
st
T1B T1 t ( p , f )
st
квантиль
n
n
;
(6.30)
,
(6.31)
распределения
Стьюдента
для
вероятности p = и числа степеней свободы f = n–1. Значения t(p, f)
приведены в табл. П.3 для различных n и p.
100
В подобных случаях обычно рассчитывают границы
2
доверительного интервала и для дисперсии H
, B2 . Решение этой
задачи основано на рассмотрении случайной величины вида
2
( n 1 )st2
t2
.
(6.32)
Ее функция распределения называется распределением xu-квадрат,
или 2 - распределением.
При заданной достоверности подберем такие положительные
числа x1 ( ) и x2 ( ) , чтобы выполнилось условие
P ( x12 ( ) 2 x22 ( )) F ( x22 ( )) F ( x12 ( ))
1 1
.
2
2
Перепишем его с учетом выражения (6.32) в виде
2
( n 1 )st2
P x1 ( )
x22 (
2
t
) ,
откуда получаем
( n 1 )st2
( n 1 )st2
2
.
P 2
t 2
x
(
)
x
(
)
1
2
(6.33)
Из условия (6.33) запишем расчетные формулы для определения
границ доверительного интервала дисперсии t2 с доверительной
вероятностью :
2
tB
( n 1 )st2
;
2
( p1 , f )
(6.34)
2
tH
( n 1 )st2
,
2
( p2 , f )
(6.35)
101
где 2 ( p1 , f ) x12 ( ) и 2 ( p2 , f ) x22 ( ) табличные значения
1
1
квантилей 2 - распределения при p1
, p2
и f = n–1. Они
2
2
приведены в табл.П.4 для различных значений f и p.
Доверительные границы для вероятности безотказной работы
P(t) при нормальном законе распределения можно приближенно
рассчитать, используя формулу (4.15) при соответствующих
сочетаниях доверительных границ для T1 и t .
Планирование определительных испытаний по плану NUN при
ожидаемом нормальном законе распределения производится по
заданной точности оценки средней наработки до отказа
u
t
2
,
n
(6.36)
откуда объем выборки
N n ( u
2
t 2
) .
(6.37)
§ 6.5. Интервальные оценки при экспоненциальном распределении
При экспоненциальном законе распределения отказов сначала
по результатам испытаний рассчитывают интервальные оценки для
интенсивности отказов по формулам
H
B
2 ( p1 , f )
2t
2 ( p2 , f )
2t
;
(6.38)
,
(6.39)
где 2 ( p1 , f ), 2 ( p2 , f ) табличные значения квантилей 2 1
1
распределения при p1
, p2
и f = 2n; t суммарная
2
2
102
наработка. Значения t рассчитываются в зависимости от типа плана
испытаний по формулам табл.6.1.
Доверительные границы для вероятности безотказной работы и
средней наработки до отказа рассчитывают по выражениям:
PH exp( B t ) ; PB ( t ) exp( H t );
T1H 1/B ; T1B 1/ H .
(6.40)
(6.41)
При больших объемах испытуемых выборок (n > 50)
доверительные границы для T1 можно рассчитывать по формулам
(6.30), (6.31). Если при этом получение значения st окажется
затруднительным,
можно
воспользоваться
свойством
экспоненциального распределения t T1 и принять s t T̂1 .
Если в процессе испытаний отказы не наблюдались (n=0),
определяется только нижняя доверительная граница средней
наработки до отказа по формуле
T1H
2t
,
2( p, f )
(6.42)
где p = ; f = N; N объем испытуемой выборки.
Планирование
определительных
испытаний
при
экспоненциальном распределении заключается в определении объема
выборки и продолжительности испытаний, обеспечивающих
получение оценок показателей безотказности с ошибкой, не
превосходящей заданную. При этом используется расчетный
показатель
k
,
1
H
100
где заданная предельная ошибка в процентах.
Для плана NUN с учетом формулы (6.38)
k
2N
,
( p1 , f )
2
103
(6.43)
1
; f = 2N.
2
Объем выборки можно определить из соотношения
где p1
N 12 2 ( p1 , f )( 1 100 ) .
(6.44)
При планировании испытаний по планам с усеченными
выборками можно составлять соотношения, аналогичные (6.44),
используя формулы (6.38), (6.43) и табл.6.1, или выражение закона
Пуассона в виде
r 1
P ( n r ) 1 exp( NT )
i 0
( NT )i
,
i!
(6.45)
где P(n>r) вероятность получения числа отказов n больше
заданного r. Принимая эту вероятность достаточно большой
( P( n r ) 0,9 ) и задавая две величины из трех (N, r, T), определяем
искомую третью.
§ 6.6. Контрольные испытания на надежность
Контрольные испытания на надежность имеют своей целью
проверить гипотезу о том, что надежность не ниже установленного
уровня. При этом конечным результатом является одно из двух
решений: принять изделие (партию изделий), считая их надежность
удовлетворительной, или забраковать изделие (партию изделий) как
ненадежные.
Поскольку контрольные испытания на надежность является
выборочными, при принятии решения возможны ошибки двух видов.
Ошибка первого рода имеет место, когда хорошая партия
изделий бракуется. Ее вероятность определяется случайными
причинами и называется риском поставщика .
Ошибка второго рода имеет место, когда плохая партия
изделий принимается. Ее вероятность называется риском заказчика
.
В настоящее время на практике в основном используется два
метода контроля надежности по результатам испытаний:
одноступенчатый контроль и последовательный контроль.
104
Одноступенчатый контроль. Этот метод заключается в
следующем. Из контролируемой партии объемом N изделий берется
одна случайная выборка объемом N изделий. Исходя из значений N ,
N, , , по стандартной методике составляют план испытаний и
устанавливают оценочные нормативы контролируемых показателей
надежности H , , , где H норма показателя;
браковочное значение; приемочные значения показателя. В
процессе испытаний фиксируют число наблюдаемых отказов r и
суммарную наработку испытуемых изделий t . Испытания
прекращают как только будет достигнуто плановое значение
предельной суммарной наработки t max или предельное число
наблюдаемых отказов rnp в течение установленной планом
продолжительности испытаний t И .
Если во время испытаний на интервале времени при t t max
имеет место предельное число отказов rnp , принимают решение о
несоответствии требованиям к показателю надежности.
Если в пределах времени t И наблюдаемое число отказов r rnp ,
а суммарная наработка достигла предельного значения ( t tmax ) ,
принимается решение о соответствии требованиям к показателю
надежности.
Решение о соответствии надежности всей партии из N изделий
установленным требованиям принимают лишь при положительных
решениях по всем контролируемым показателям надежности
испытуемой выборки.
При
испытаниях
одноступенчатым
методом
невосстанавливаемых изделий объем выборки должен быть не
меньше предельного числа отказов ( N rmax ) . Если при этом планом
испытаний установлена их продолжительность
t И , можно
использовать формулу
N
t max t max
,
tИ
T
где T приемочное значение показателя типа средняя наработка до
отказа, средний ресурс, средний срок службы.
105
При испытаниях с восстановлением или заменой изделий объем
выборки жестко не регламентируется. Рекомендуемая его величина
может быть определена как
N tmax / t И .
Метод одноступенчатого контроля целесообразно использовать
при жестком ограничении продолжительности
проведения
испытаний.
Последовательный контроль. Метод последовательного
контроля
не
предполагает
предварительного
планирования
продолжительности испытаний. Они проводятся поэтапно с анализом
результатов и принятием решения после завершения каждого этапа.
Процесс испытаний представляют в виде графика (рис. 6.1).
Рис.6.1 График последовательности проведения
контрольных испытаний на надежность
Откладываем по оси абсцисс отрезки времени, соответствующие
моментам наступления отказов t1 , t 2 , t 3 ,..., а по оси ординат число
отрезков с накоплением 1,2,3,.... Получаем ступенчатую линию,
которую можно рассматривать как некоторую реализацию
случайного процесса изменения состояния выборки (потока отказов).
106
При одноступенчатом контроле, рассмотренном выше, заключение о надежности делалось по значениям rпр и tи , соответствующем
tmax, т.е. по общим итогам испытаний. При последовательном контроле
проверка соответствия надежности заданному уровню производится
после каждого очередного отказа.
Для этого по заданным значениям , , , по специальным
формулам [20] предварительно строят две прямые параллельные линии линию соответствия и линию несоответствия, которые
разделяют поле графика на три зоны, как показано на рис.6.1. Если в
момент очередного отказа ступенчатая линия попадает в зону выше
линии несоответствия (в зону браковки), то принимается решение о
несоответствии надежности используемых изделий заданным
требованиям и испытания прекращаются. Если на этапе испытания
после очередного отказа ступенчатая линия попадает в зону ниже
линии соответствия (в зону приемки), принимается решение о
соответствии
надежности
испытуемых
изделий
заданным
требованиям и испытания прекращаются. Если ступенчатая линия
остается между линиями соответствия и несоответствия (в зоне
неопределенности), испытания продолжаются.
Последовательный метод целесообразно использовать при
ограниченном числе изделий, выделяемых для испытаний. Этот
метод эффективен при испытаниях восстанавливаемых изделий.
Методики планирования и проведения контрольных испытаний
на надежность для различных типов планов испытаний и видов
закона распределения приведены в ГОСТ 27.410-87.
При математической обработке результатов испытаний выборки
одинаковых объектов следует предварительно исключить заведомо
неверные (грубые ошибки). Это значительные по величине случайные
ошибки, возникающие вследствие неконтролируемых отклонений
условий эксперимента для отдельных объектов или неправильных
действий экспериментатора. Их определение можно производить по
критерию Стьюдента, используя соотношение
Yk Y
sy
t ,
(6.46)
где Yk – результат опыта (измерения), резко выделяющийся на фоне
остальных; Y , sy – среднее арифметическое результатов опыта и
107
среднеквадратическое их отклонение по всем объектам, но без учета
сомнительного результата; t – квантиль распределения Стьюдента
для значений вероятности p= и числа степеней свободы f=n – 1.
Глава 7.
ПРИНЦИПЫ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
§ 7.1. Основные положения
Одним из основных путей повышения надежности технических
систем, широко используемых на практике, является увеличение
уровня их безотказности. Это достигается за счет применения более
надежных элементов и использования различного вида избыточности.
Однако лежащие в основе такого подхода конструктивные, схемные и
технологические возможности ограничены, особенно для сложных
систем.
Хорошие перспективы повышения как надежности, так и общей
эффективности использования объектов различного назначения и
любой сложности открываются в направлении совершенствования их
технического обслуживания в процессе эксплуатации. При этом
решаются следующие задачи:
1) повышение безотказности за счет своевременного проведения
профилактических мероприятий;
2) сокращение эксплуатационных расходов за счет установления
оптимального объема и сроков проведения поддерживающих и
восстановительных операций;
108
3) повышение уровня безопасности за счет предотвращения
непредвиденных отказов и связанных с ними аварийных ситуаций;
4) постоянное поддержание на оптимальном уровне качества
функционирования объекта за счет оперативного устранения дефектов, вызывающих снижение степени его работоспособности.
Для решения этих задач требуется разработка рациональных
методов и средств, обеспечивающих достоверную оценку
фактического состояния объекта, прогнозирование его изменения и
опе- ративный поиск возможных дефектов, что составляет предмет
исследования технической диагностики.
Техническая диагностика представляет собой научную
дисциплину, исследующую состояния технических объектов,
причины и закономерности их изменения, а также разрабатывающую
методы и средства определения технических состояний.
Процесс определения технического состояния называется
диагностированием. В общем случае он заключается в проверке
объекта на соответствие всем установленным для него техническим
требованиям. В период эксплуатации объекта диагностирование
проводится с целью установления факта нахождения его в одном из
двух
возможных
состояний
—
работоспособном
или
неработоспособном и оценки степени его работоспособности. В этом
случае на соответствие техническим требованиям проверяют не все
признаки, характеризующие свойства объекта, а лишь некоторое их
подмножество — диагностические признаки. Такая проверка обычно
базируется на анализе характера реакции объекта на управляющие и
возмущающие воздействия во всех возможных режимах его
функционирования.
Основные сигналы, характерные для
работающего объекта, показаны на рис.7.1.
Входные сигналы представлены векторами управляющих
рабочих или тестовых воздействий Х и возмущающих воздействий W,
выходные рабочие сигналы — вектором Y. Кроме выходных рабочих
сигналов реакцию объекта характеризуют промежуточные рабочие
сигналы и косвенные признаки, определяемые общим вектором R. В
объекте может иметь место и обратная связь по выходным сигналам
(вектор Yос).
109
Рис.7.1. Воздействующие сигналы и сигналы реакции
объекта диагностирования
К числу рабочих выходных и промежуточных сигналов
относятся сигналы, характеризующие результаты выполнения
объектом или его элементами предусмотренных рабочих функций.
Это могут быть амплитуда и частота напряжения, угловая скорость
вращения, давление, температура (для электронагревательных
устройств), время выполнения определенных операций и т.п.
К косвенным выходным сигналам относятся сигналы,
характеризующие отдельные свойства объекта и его элементов, но не
входящие непосредственно в состав заданного алгоритма его
функционирования. К ним относятся параметры вибрационных
характеристик (кроме вибрационных установок), температура нагрева
(кроме
электронагревательных
устройств),
параметры
электромагнитных
полей
(кроме
специальных
излучающих
устройств), электрическое сопротивление (кроме специальных
измерительных устройств), параметры акустических сигналов (кроме
специальных сигнальных устройств и устройств связи), состав
выхлопных газов и т.п.
В зависимости от вида входных сигналов вектора X (рабочих
или тестовых) процесс диагностирования называется рабочим
(функциональным), тестовым или комбинированным.
Из компонент векторов Y и R, а также из множества параметров
элементов и узлов объекта, формируется на стадии проектирования
объекта совокупность признаков {zi } (i 1, s) , характеризующих
изменяющиеся свойства объекта и используемых для контроля
состояния. Они приводятся в сдаточной и эксплуатационной
документации на объект в виде технических требований и носят
название диагностических признаков, или диагностических
параметров. В пространстве диагностических признаков такие
110
совокупности можно рассматривать как векторы Z j ( z j1 , z j 2 ,..., z js ) ,
каждый из которых соответствует определенному состоянию объекта.
В общем случае число возможных состояний объекта может
быть бесконечно большим, но при этом все они будут находиться в
некоторой ограниченной области возможных состояний S. В этой
области можно выделить два непересекающихся подмножества S1 и
S 2 , где S1 подмножество работоспособных состояний; S 2
подмножество неработоспособных состояний.
В области S1 всегда можно задать номинальный вектор
состояния Z H , соответствующий оптимальному (наилучшему) состоянию объекта по заданным показателям эффективности его
использования. Величина отклонения текущего вектора состояния
Z j от номинального Z H по направлению к границе области S1
характеризует степень работоспособности объекта C r .
s
z i
C r a i 1
z
i 1
i доп
(7.1)
или
s
|z i z i доп |
i 1
z i доп
C r ai
,
(7.2)
где s число принятых к рассмотрению диагностических
признаков; zi | ziH zi | величина отклонения текущего i-го
диагностического параметра zi от его номинальной (нормативной)
величины z iH ; z i доп | z iH z i доп | предельно допустимое
отклонение i-го диагностического параметра от номинального
значения; z i доп предельно допустимое (граничное, или отказовое)
a i весовой
i-го диагностического параметра;
s
коэффициент a i 1 . Величина | z i z i доп | определяет запас
i 1
работоспособности объекта по каждому i-му параметру.
Оценка работоспособности в общем случае предполагает
решение двух задач: контроль работоспособности, т.е. установление
факта нахождения вектора состояния объекта в области S1 или S 2 , и
определение степени работоспособности (при условии нахождения
значение
111
состояния объекта в области S1 ). Для их решения необходимо знать
условия работоспособности объекта, которые формируются в виде
ограничений на изменение диагностических параметров на начальной стадии расчета надежности. Способы задания таких условий
зависят как от характеристик объекта, так и от режима его
использования. При установлении факта отказа (нахождения вектора
объекта в области S 2 ) осуществляется поиск дефекта.
После установления факта работоспособности объекта может
производиться прогнозирование изменения его состояния на заданный момент времени в будущем.
Таким образом, под процессом диагностирования в общем
случае
понимается
контроль
работоспособности,
оценка
работоспособности, поиск дефектов, прогнозирование изменения
состояния.
Применительно к каждому конкретному объекту эти
задачи могут решаться в комплексе или в различных сочетаниях.
Реализация задач диагностирования осуществляется на базе
проверок с последующим анализом их результатов. Каждая проверка
заключается в определении работоспособности объекта в целом,
группы элементов или одного элемента и состоит из одной, двух или
нескольких элементарных проверок.
Под элементарной проверкой понимается подача рабочего или
тестового сигнала, измерение одного диагностического признака и
сравнение его с номинальным или граничным значением. В
простейших случаях элементарная проверка может не включать в
себя подачу входного сигнала, а операция измерения заменяется
органолептической оценкой.
§ 7.2. Методология технической диагностики
Методология
технической
диагностики
базируется
на
следующих исходных положениях.
1. Допущение о том, что объект может находиться лишь в
конечном множестве состояний S. Оно основано на факте
ограниченных возможностей измерительных средств. При этом
мощность подмножества работоспособных состояний объекта S1
включает все состояния при различных сочетаниях диагностических
признаков, позволяющие выполнять заданные функции в
соответствии с установленными техническими требованиями.
112
Мощность подмножества неработоспособных состояний
S2
определяется количеством возможных сочетаний вызывающих отказ
дефектов ns и уровнем, или глубиной поиска дефектов.
n
ns
i 1
C ni
n
n!
,
i 1 i ! ( n i )!
(7.3)
где n — число элементов в рассматриваемой структурной схеме
объекта; i — число возможных одновременно дефектов.
2. Решение задач по оценке фактического состояния объекта
сводится к анализу множества S в целом или подмножеств S1 и S 2 .
При контроле работоспособности проверяют соответствие объекта
условиям работоспособности и на основании полученных результатов
относят состояние объекта к одному из подмножеств S1 или S 2 .
Условия работоспособности задаются как ограничения значений
диагностических признаков, при которых объект остается
работоспособным.
Для работоспособного объекта рассчитывают степень и запас
работоспособности. При установленной неработоспособности
объекта на основании анализа подмножества S 2 определяют
фактическое состояние объекта, и соответствующий ему вид дефекта.
Накопленная информация по оценке работоспособности объекта
в различные моменты времени в прошлом дает возможность
установить тенденцию перемещения вектора состояний по
траектории и скорости и предсказать момент перехода его в область
S 2 , т.е. осуществить прогнозирование изменения состояния объекта.
3. Возникновение дефекта не обязательно приводит к отказу
объекта. Он может оставаться работоспособным, но при этом
происходит перемещение вектора состояния в области S1 по
направлению к ее границе. Отсюда следует, что при значительном
снижении степени работоспособности объекта поиск дефекта
возможен и в области работоспособных состояний S1 . Особенно
характерно это для случаев частичных отказов в объектах со
структурной избыточностью.
4. В процессе диагностирования участвуют в общем случае
объект
диагностирования
(ОД),
технические
средства
диагностирования (ТСД) и человек-оператор (ЧО). Их совокупность
образует систему диагностирования (рис.7.2).
113
Рис.7.2. Обобщенная структурная схема
системы диагностирования
§ 7.3. Тестовые сигналы
Для выполнения тестового диагностирования требуется наличие
специальных источников, генерирующих тестовые воздействия,
прикладываемые к объекту в целом или к его определенным
элементам. Эти воздействия могут подаваться как управляющие в
составе вектора X или как возмущающие в составе вектора W
(рис.7.1), что обычно имеет место при диагностировании объектов в
условиях,
отличных
от
эксплуатационных,
например,
на
испытательных стендах. Тестовые возмущающие воздействия могут
подаваться совместно с управляющими, если это предусмотрено
требованиями сдаточной или эксплуатационной технической
документации.
При диагностировании электротехнических систем тестовые
управляющие воздействия чаще всего представляют собой
электрические сигналы в виде напряжения различной формы,
амплитуды или частоты. Возмущающие воздействия могут быть
различной природы — механические вибрационные, температурные,
электромагнитные и т.п.
Рассмотрим основные виды типовых электрических тестовых
сигналов.
При диагностировании объектов и элементов дискретного
действия используются следующие сигналы:
1) единичная ступенчатая функция, или единичный скачок
(рис.7.3). Ее аналитическое выражение
114
1 при t 0;
u( t ) 1( t )
0 при t 0;
2) неединичная ступенчатая функция, или сигнал включения
(рис.7.4)
U при t 0;
u( t ) U 0 1( t ) 0
0 при t 0;
3) сигнал в виде наборов ―1‖ и ―0‖ в
обеспечивающих
проверку
срабатывания
всех
диагностируемой системы.
сочетаниях,
элементов
При диагностировании объектов и элементов непрерывного
действия используются сигналы:
1) единичная ступенчатая функция. Реакция на это воздействие
представляет собой переходную функцию h(t) (рис.7.3);
2) неединичная ступенчатая функция. Реакция переходная
характеристика H(t) (рис.7.4);
3) сигнал типа -функции Дирака (рис.7.5)
0 при t 0;
d
u( t ) ( t ) 1( t ) при t 0;
dt
0 при t 0.
115
Рис.7.3. Тестовый сигнал
в виде единичной ступенчатой функции
Рис.7.4. Тестовый сигнал
в виде неединичной ступенчатой функции
Особенностью - функции является то, что ее площадь равна
единице, т.е.
( t )dt 1.
Реакция на - функцию представляет собой импульсную, или
весовую функцию (t). Связь переходной функции с импульсной
имеет вид
t
h( t ) ( t )dt ;
0
4) сигнал в виде напряжения, возрастающего по линейному
закону
0 при t 0;
u( t )
kt при t 0.
Вид тестового сигнала и реакции на него y(t) показаны на
рис.7.6;
116
Рис.7.5. Тестовое воздействие
в виде -функции
Рис.7.6. Тестовое воздействие в виде линейно возрастающей функции
5) синусоидальный сигнал
u( t ) U sin(t 1 ) .
Если объект линейный,
синусоидальный сигнал
то
на
выходе
будет
также
y( t ) Y sin(t 2 ) .
Сигналы такого вида при U const используются в основном
для получения амплитудных и фазовых частотных характеристик
объекта диагностирования.
Применительно к конкретным объектам с учетом особенностей
их состава и функционирования тестовые воздействия могут
представлять собой различные комбинации типовых сигналов.
117
Глава 8.
КОНТРОЛЬ РАБОТОСПОСОБНОСТИ
§ 8.1. Условия работоспособности
Общая
задача
контроля
работоспособности,
которая
заключается в определении места нахождения вектора состояния в
области S1 или в области S 2 , может иметь значительное число
способов решения в зависимости от вида объекта, режимов его
функционирования, числа и вида установленных диагностических
признаков и т.п. Отсюда и большое число вариантов задания условий
работоспособности.
Для
объектов
непрерывного
действия
условия
работоспособности обычно задают неравенствами, ограничивающими
значения диагностических признаков. Вид ограничения определяется
тенденцией изменения диагностических признаков и их граничными
(отказовыми) значениями.
В общем случае такие ограничения задаются следующим
образом:
z i z i min , i 1, k ;
(8.1)
z i z i max , i 1, l ;
z i min z i z i max, i 1, m ,
где zi текущее значение i-го диагностического признака;
z i min , z i max соответственно нижнее и верхнее граничные значения
i-го диагностического
признака; k число диагностических
признаков, имеющих тенденцию к уменьшению величины контролируемого параметра в процессе эксплуатации объекта; l число
диагностических признаков, имеющих тенденцию к возрастанию;
m число диагностических признаков, имеющих неопределенную
тенденцию изменения.
Для контроля работоспособности объектов, действующих в
неизменяющихся режимах, в качестве диагностических признаков
используют измеряемые параметры такие, например, как
118
сопротивление электрической изоляции; температура, частота или
амплитуда вибрации, частота вращения, напряжение и т.п.
При контроле работоспособности объектов, работающих в
изменяющихся режимах, дополнительно используют признаки,
характеризующие степень отклонения их характеристик от
номинальных. При этом в зависимости от характера изменения
режимов и вида диагностирования такое сравнение проводят по
статическим,
динамическим
(переходным)
или
частотным
характеристикам.
Для статических и частотных характеристик в качестве
диагностических признаков используются следующие показатели:
1) отклонение текущей характеристики (x) от номинальной f(x) на
заданных интервалах рабочего участка | f ( x i ) ( x i ) | , i 1, n ,
где n число точек измерения;
2) величина среднего отклонения текущей характеристикиот
n
номинальной на рабочем участке 1 | f ( x i ) ( x i ) |, i 1, n ;
n i 1
3) среднеквадратичное отклонение текущей характеристики от
номинальной на рабочем участке
1 n
( f ( x i ) ( x i )) 2 ;
n i 1
4) величина максимального отклонения текущей характеристики
от номинальной на рабочем участке sup | f ( x ) ( x ) | .
Для переходных характеристик можно использовать те же
показатели, что и для статических, или показатели, определяющие
вид
переходного
процесса:
величину
максимального
перерегулирования , статическую точность регулирования , число
колебаний n, крутизну c tg , время переходного процесса t n
(рис.8.1).
Допустимое отклонение на всю характеристику может
задаваться в виде ―маски‖ (рис.8.2).
119
Рис.8.1. Переходная
характеристика
Рис.8.2. ―Маска‖
Вместо
совокупности
установленных
диагностических
признаков при текущем контроле работоспособности часто
используют лишь один из них наиболее чувствительный к
изменению состоя- ния объекта (определяющий) zon или признак,
функционально связы- вающий два или несколько диагностических
признаков (обобщенный) z oб .
Дискретный объект при определении его работоспособности
рассматривают как преобразователь вектора входных воздействий
X ( x1 , x2 ,..., xn ) в выходной вектор Y ( y1 , y2 ,..., ym ), где x i , yi
значения сигналов на соответствующих входах и выходах; n, m
число входов и выходов объекта. Поскольку каждому входному
вектору X k работоспособного объекта соответствует определенный
выходной вектор Yk , условием работоспособности дискретного
объекта будет установленное соответствие всех возможных входных
векторов X k выходным Yk , ( k 1, N ) . Количество входных векторов
N при функциональном диагностировании равно числу возможных
рабочих воздействий, а при тестовом диагностировании N
определяют из условия подачи количества тестовых сигналов,
минимально необходимого для проверки правильности срабатывания
всех элементов.
Если определение работоспособности объекта основано на
проверке работоспособности каждого из составляющих его
элементов,
условием
его
работоспособности
является
работоспособность каждого элемента. В таких случаях вектор
состояния описывается как S ( s1 , s2 ,...,sn ) , где n — число
120
элементов; sk , (k 1, n ) состояние каждого k-го элемента,
определяемое как ―1‖ в случае его работоспособности и как ―0‖ в
случае его неработоспособности. Условие работоспособности такого
сложного объекта запишется как S ( 1, 1,...,1 ) . При этом условия
работоспособности каждого элемента могут задаваться с
использованием вышерассмотренных способов.
§ 8.2. Методы контроля работоспособности объектов непрерывного
действия
Контроль работоспособности объектов любого вида основан на
проверке условий их работоспособности. Для этого к объекту
прикладывают определенные воздействия рабочие (функциональные) или тестовые и оценивают его реакцию в различных режимах
функционирования путем снятия динамических или статических
характеристик и расчета значений диагностических признаков.
Некоторые диагностические признаки могут быть оценены путем
непосредственного
их
измерения.
Процедура
контроля
работоспособности, перечень измеряемых и рассчитываемых
диагностических признаков, условия работоспособности должны
быть установлены на стадии проектирования объекта и системы
диагностирования, уточнены по результатам отработки опытного
образца или определительных испытаний на надежность и приведены
в эксплуатационной и сдаточной документации.
Рассмотрим некоторые наиболее широко применяемые при
диагностировании электротехнических устройств и систем методы
контроля работоспособности.
1. Метод
контроля
по
совокупности
диагностических
параметров. Для его реализации должна быть установлена
минимально необходимая совокупность диагностических признаков и
заданы допустимые пределы их изменения. При реализации этого
метода производится снятие необходимых статических и
динамических характеристик, измерение и расчет диагностических
признаков и проверка условий работоспособности в соответствии с
выраже-ниями (8.1). Если все условия выполняются, объект
признается рабо-тоспособным.
Примером
этого
метода
может
служить
контроль
работоспособности судового синхронного генератора, для которого
121
диагностическими параметрами являются сопротивление изоляции
обмоток возбуждения и якорной по отношению к корпусу,
сопротивление изоляции якорной обмотки попарно между фазами,
напряжение и частота на холостом ходу и при номинальной нагрузке,
величина максимального провала напряжения и время его
установления при набросе номинальной нагрузки, температура
подшипникового узла и др.
2. Метод контроля по обобщенному диагностическому
параметру, который устанавливается по результатам анализа
диагностической модели объекта. Такой параметр должен быть
связан с двумя или несколькими диагностическими параметрами и
характеризовать состояние объекта в целом. Так, например, для
судовой электрической сети такими параметрами могут быть
коэффициент абсорбции изоляции k a или дифференциальный
коэффициент абсорбции изоляции k :
ka R60 / R15 IУТ ( 60 ) / IУТ ( 15 ) ;
k
I p ( t1 ) I p ( t 2 )
U 0C 0 ( t1 t 2 )
,
где R15 U / IУТ ( 15 ) , R60 U / IУТ ( 60 ) величины сопротивления
изоляции, измеренные соответственно через 15 и 60с после
приложения напряжения U ; IУТ ( 15 ) , IУТ ( 60 ) токи утечки через
изоляцию на корпус через 15 и 60с; I p ( t1 ) , I p ( t 2 ) токи разряда
предварительно заряженной изоляции, измеренные соответственно в
моменты времени t1 и t 2 после начала разряда; U 0 напряжение
заряда; C 0 геометрическая емкость изоляции.
3. Метод контроля по определяющему диагностическому
параметру, наиболее чувствительному к изменению состояния
объекта.
В
качестве
определяющего
обычно
выбирается
диагностический
признак,
характеризующий
правильность
функционирования объек- та и в то же время в значительной степени
зависящий от состояния большинства его элементов. Для систем
электроавтоматики, напри- мер, таким параметром может быть
коэффициент усиления.
4. Метод контроля по частотным характеристикам. Его суть
заключается в получении частотных амплитудной и фазовой
122
характеристик диагностируемого объекта в заранее установленном
наиболее информативном диапазоне частот и сравнении их с
номинальными, т.е. соответствующими состоянию максимальной
работоспособности объекта.
Для получения частотных характеристик на вход объекта
подается тестовый сигнал от генератора синусоидальных колебаний
регулируемой частоты и измеряются отношения амплитуд выходного
сигнала к входному и сдвиги их по фазе. При неизменной амплитуде
и нулевой начальной фазе входного сигнала достаточно измерять
амплитуду А и фазу Ф выходного сигнала.
Полученные характеристики A( ) и ( ) сравнивают с
номинальными A0 ( ) и 0 ( ) при помощи диагностических
признаков, рассмотренных в предыдущем параграфе.
§ 8.3. Особенности контроля работоспособности объектов дискретного
действия
Определение работоспособности объекта дискретного действия
сводится к сравнению его реакции на определенные входные
воздействия с номинальной, т.е. реакцией работоспособного объекта.
При этом входные сигналы должны обеспечивать возможность
срабатывания всех элементов, а число таких сигналов должно быть
минимальным.
Наиболее
простым
методом
формирования
минимальной последовательности входных сигналов является метод
перебора входных векторов. Рассмотрим его суть.
Сначала путем перебора возможных входных векторов X k .
формируют входную последовательность Tx . В нее включают те
векторы, при подаче которых на объект по вектору выходных
сигналов можно обнаружить дефект хотя бы в одном из элементов,
приводящий к отказу объекта. Чтобы исключить избыточность
последовательности Tx , поступают следующим образом.
Поскольку в тестовую последовательность по условию
включают входные векторы X k , каждый из которых позволяет
обнаружить по крайней мере один дефект, то последний включенный
в Tx вектор X p не может быть избыточным. Поэтому входную
последовательность векторов перестраивают таким образом , чтобы
123
вектор
X p был первым. Затем к нему добавляют векторы из
последовательности Tx , исходя из рассмотренных выше условий ее
формирования.
В
результате
получают
новую
входную
последовательность Tx1 с числом входных векторов N 1 , меньшим или
равным числу N векторов первоначальной последовательности Tx .
Последний вектор в последовательности Tx1 также будет не
избыточным. Операцию перестроения входной последовательности
повторяют до тех пор, пока не будут исключены все избыточные
векторы, т.е. пока состав последовательности входных векторов
перестанет претерпевать изменения при очередном перестроении.
Рассмотрим пример реализации этого метода применительно к
объекту, приведенному на рис.8.3. В каждом из элементов возможны
два вида дефекта: типа ‗‗const 1‘‘ и ‗‗const 0‘‘. Таким образом, при
условии отказа одного любого элемента в объекте возможны шесть
дефектов : 11, 21, 31, 10, 20, 30.
Рис.8.3. Фрагмент структурной схемы
объекта дискретного действия
Установим
входную
последовательность
векторов,
обеспечивающих возможность срабатывания всех элементов и
определим какие дефекты обнаружит каждый вектор. Результаты
отразим в табл.8.1, отмечая факт обнаружения дефекта символом «1».
Полученная входная последовательность является избыточной.
Произведем первое перестроение. Записав последний вектор первым
и добавляя последующие, позволяющие обнаружить ранее не
обнаруженные дефекты (табл.8.2).
124
Входная
последовательность Tx
Х1=100
Х2=101
Х3=001
Х4=000
Входная
последовательность Tx1
Х4=000
Х1=100
Х2=101
11
–
–
1
1
Таблица 8.1
Обнаруживаемые дефекты
21
31
10
20
30
1
–
1
–
1
–
–
1
1
1
–
–
–
1
1
1
1
–
–
–
Таблица 8.2
Обнаруживаемые дефекты
11
1
–
–
21
1
1
–
31
1
–
–
10
–
1
1
20
–
–
1
30
–
1
1
В полученную последовательность не включаем вектор X 3 ,
поскольку он избыточен.
Произведем следующее перестроение, действуя аналогичным
способом (табл.8.3).
Таблица 8.3
Входная
Обнаруживаемые дефекты
последовательность Tx2
11
21
31
10
20
30
Х2=101
–
–
–
1
1
1
Х4=000
1
1
1
–
–
–
Получаем минимальную входную последовательность двух
векторов, обеспечивающую диагностирование работоспособности
объекта.
С целью сокращения продолжительности операции контроля
работоспособности устанавливают определенную последовательность
подачи входных векторов в соответствии с условием их значимости,
и подачу тестовых сигналов прекращают при первом отмеченном
отклонении выходного вектора от его эталонного (номинального)
значения. Числовым показателем уровня значимости входных
векторов Xi может служить соотношение
125
k i n д i / nд ,
где nд, nдi — соответственно общее число возможных дефектов и число
дефектов, обнаруживаемых i-м текстовым сигналом.
Глава 9.
ПОИСК ДЕФЕКТОВ
§ 9.1. Основные методы и критерии
Процесс поиска дефектов включает в себя последовательное
решение трех задач: установление отказавшего элемента,
определение вида дефекта и выявление его причины. При этом
основным критерием эффективности решения всех задач является
степень
технологичности
получения
результатов,
которые
определяются величиной произведенных затрат труда и времени.
Применительно к конкретным объектам критерий эффективности
поиска дефектов может устанавливаться как минимальная
продолжительность, минимальная трудоемкость, минимальная
стоимость используемых средств диагностирования или как одна из
оптимальных комбинаций этих показателей. Отсюда следует, что
поиск дефекта необходимо проводить по предварительно
составленной оптимальной программе. Разработку такой программы
целесообразно осуществлять еще на стадии проектирования объекта.
В настоящее время известно большое число методов,
обеспечивающих оптимизацию алгоритма поиска дефектов в
объектах различного вида, назначения, режимов использования,
способов диагностирования. С некоторой степенью условности их
можно разделить на два принципиально различных вида:
комбинационные и последовательные.
Общий признак комбинационных методов заключается в
следующем. После установления факта отказа объекта производится
ряд проверок в различных режимах его работы. Дефекты
определяются на основании анализа совокупности полученных
126
результатов. При этом однозначное установление дефекта возможно
лишь при достаточном количестве проверок. Наиболее эффективна
реализация комбинационного метода на специализированных
диагностирующих устройствах (стендах), использование которых
экономически целесообразно при диагностировании большого числа
однотипных сложных объектов. В составе объектов ответственного
назначения
предусматриваются
штатные
устройства
диагностирования.
Характерной особенностью последовательных методов является
то, что проверки производятся последовательно одна за другой с
анализом результатов каждой из них. При этом можно выделить две
разновидности метода — последовательных поэлементных проверок
и последовательных групповых проверок.
При
поэлементных
проверках
производится
контроль
работоспособности отдельных элементов в определенной заранее
установленной последовательности до тех пор, пока не будет найден
отказавший. Последовательность проведения проверок является
безусловной (жесткой) и устанавливается в зависимости от вида
критерия эффективности и объема исходной информации об объекте
по одному из следующих показателей:
по значениям вероятности отказа элементов ( q i ) — в
направлении их уменьшения;
по значениям стоимости ( ci ) или продолжительности ( t i )
проведения проверок — в направлении их возрастания;
по комплексным показателям:
qi / t i , qi / ci , qi / ci t i — в
направлении их уменьшения.
При групповых проверках устанавливают некоторую условную
(гибкую) последовательность проведения проверок, в пределах
которой в зависимости от полученных результатов реализуется
последовательность проверок при поиске конкретного дефекта. По
результату первой проверки определяют группу элементов,
включающую отказавший, и устанавливают вид следующей
проверки. По ее результату определяют подгруппу в пределах ранее
выявленной группы, включающую отказавший элемент, и
устанавливают вид следующей проверки и т. д. до тех пор, пока по
результату очередной проверки не будет выявлен отказавший
элемент.
Поиск дефектов обычно проводится поэтапно на различных
уровнях. Сначала объект разбивают на элементы, представляющие
127
собой отдельно установленные устройства такие, например, как щит
питания, станция управления, исполнительный механизм с
приводным электродвигателем и т.п., составляют соответствующую
этому уровню структурную схему и определяют отказавший элемент.
После этого отказавший элемент рассматривают как систему,
состоящую из элементов более низкого уровня, таких, например, как
стабилизатор, выпрямитель, блок питания, якорная обмотка и т.п., и в
ее пределах определяют отказавший элемент. Понижение уровня
поиска дефекта при необходимости может производиться до системы,
состоящей из первичных элементов.
Каждая из составляемых при поиске дефекта структурная схема
представляет собой функциональную диагностическую модель
объекта или его части на рассматриваемом уровне.
После определения отказавшего элемента на последнем уровне
путем
его
осмотра
или
дополнительного
обследования
устанавливается вид дефекта и принимается решение о замене или
ремонте. При этом особое внимание следует уделить выявлению
причины дефекта с целью ее устранения. Если анализ вида дефекта
показал, что обнаруженный отказ является зависимым, операцию
поиска дефекта следует продолжить.
Структурная схема объекта, составляемая при разработке
программы поиска дефекта, в отличие от ранее рассматривавшихся
структурных логических схем для расчета надежности представляет
собой совокупность функциональных частей (элементов) объекта,
соединенных между собой в соответствии с порядком прохождения
сигналов. Построение схемы должно давать наглядное представление
о последовательности взаимодействия функциональных частей
объекта. Направление хода процессов, происходящих в нем,
обозначают стрелками на линиях взаимосвязи, функциональные
объекты обозначают в виде прямоугольников.
Состояние объекта на каждом уровне описывают вектором,
компонентами которого являются показатели состояния элементов
1 (работоспособен) или 0 (неработоспособен).
Хотя теоретически число неработоспособных состояний может
быть любым в пределах, определяемых выражением (7.3), программы
обычно составляют применительно к поиску одного дефекта. Это
вполне оправданно, так как на практике в большинстве случаев отказ
объекта вызывается одним независимым дефектом. Кроме того, даже
при наличии двух и более дефектов их поиск ведется
последовательно один за другим. Таким образом, число возможных
128
состояний отказавшего объекта на рассматриваемом уровне
принимается равным числу его элементов, что соответствует
выражению (7.3) при i=1.
Все используемые на практике разновидности комбинационных
и последовательных методов поиска дефектов по своей сути являются
формальными. Однако наличие оптимальной программы не
исключает, а во многих случаях даже предполагает использование
при поиске дефектов эвристических подходов и приемов. Общим их
принципом является формирование на основании анализа характера
проявления отказа одной или нескольких логических гипотез о его
причине и последующая их проверка.
§ 9.2. Принципы реализации комбинационных методов поиска
дефектов
В общем случае процедура формирования алгоритма поиска
дефекта комбинационным методом заключается в следующем. На
основе структурной, функциональной и принципиальной схем
объекта составляют структурную схему (функциональную модель)
для требуемого уровня поиска дефекта. В качестве элементов
(функциональных элементов) такой схемы в зависимости от уровня
поиска дефекта принимают отдельные устройства, блоки, узлы или
первичные элементы. Пример фрагмента подобной структурной
схемы приведен на рис.9.1.
Рис.9.1. Фрагмент структурной схемы (функциональной
модели) объекта: 1 - 6 функциональные элементы;
x1 , x 2 входные сигналы; y1 , y 2 , y3 , y5
промежуточные сигналы; y 4 , y 6 выходные сигналы
129
На основании структурной схемы задают множество возможных
состояний объекта, описываемых n-мерными векторами состояний
S i , где n число функциональных элементов. Каждый компонент
такого вектора определяет состояние соответствующего элемента
(1 элемент работоспособен, 0 элемент неработоспособен).
Строят таблицу состояний объекта. В таблице количество строк
соответствует числу возможных состояний, а количество столбцов
числу проверок. Результаты проверок, соответствующие норме, когда
измеренные значения всех диагностических признаков (в частном
случае выходных сигналов) проверяемой группы элементов
находятся в допустимых для ее работоспособного состояния
пределах, обозначаются символом ―1‖. Результаты проверок, не
соответствующие норме, обозначаются символом ―0‖. Примером
составления
такой таблицы для объекта, представленного
структурной схемой на рис.9.1, является табл.9.1.
При использовании автоматизированных устройств и систем
диагностирования на базе ЭЦВМ множество возможных состояний
объекта описывают в виде матрицы со строками S i и столбцами j .
Для практического использования при отыскании дефекта в
отказавшем объекте ручными способами таблицу состояний
целесообразно представлять в виде табл.9.2.
Таблица 9.1
Таблица состояний объекта при одном возможном дефекте
Проверки j
Состояния Si
S0=(111111)
S1=(011111)
S2=(101111)
S3=(110111)
S4=(111011)
S5=(111101)
S6=(111110)
1
2
3
4
5
6
1
0
1
1
1
1
1
1
1
0
1
1
1
1
1
0
0
0
1
1
1
1
1
0
1
0
1
1
1
0
0
0
0
0
1
1
0
0
0
0
0
0
130
Таблица 9.2
Таблица состояний объекта для практического использования
Отказавший
элемент
1
2
3
4
5
6
Элементы и изменяемые параметры
1
y1
0
1
1
1
1
1
2
y2
1
0
1
1
1
1
3
y3
0
0
0
1
1
1
4
y4
1
0
1
0
1
1
5
y5
0
0
0
0
0
1
6
y6
0
0
0
0
0
0
Кодовое
число
дефекта
010100
100000
110100
111000
111100
111110
Кодовое число дефекта составляется по результатам всех
предусмотренных проверок. Если в таблице состояний нет
одинаковых кодовых чисел, то количество проверок (измеряемых
параметров) достаточно для однозначного определения дефектного
элемента. При наличии двух или нескольких одинаковых кодовых
чисел дефект в последующем ищется в пределах соответствующей
этому кодовому числу группе элементов другими методами.
Дополнительную инфор- мацию для определения дефектного
элемента в этом случае может дать анализ характера проявления
отказа.
§ 9.3. Метод последовательных групповых проверок на базе
информационного алгоритма
Ранжирование
возможных
проверок
при
составлении
оптимальной программы поиска дефектов может производиться не
только в зависимости от экономических показателей проверок и
характеристик надежности проверяемых элементов, но и в
зависимости от их места расположения в структурной схеме объекта.
Такой принцип ранжирования дает возможность получать полную
информацию о состоянии объекта, т.е. находить дефект, используя
статистически наименьшее число проверок из всех возможных.
Реализация этого принципа базируется на аппарате теории
информации.
131
Диагностируемый отказавший объект можно представить как
некоторую физическую систему с неизвестным заранее состоянием
S i из ограниченного числа возможных ns . Поскольку система в том
или ином состоянии может оказаться случайным образом, ей
заведомо присуща некоторая степень неопределенности, которая
определяется числом ее возможных состояний и их вероятностями.
Взаимосвязи между состояниями системы S i и их вероятностями pi
аналогичны ряду распределения дискретной случайной величины.
В качестве меры априорной неопределенности системы (или
дискретной случайной величины X) в теории информации
применяется специальная характеристика — энтропия.
Энтропией
системы
называется
сумма
произведений
вероятностей всех возможных состояний системы на логарифмы их
вероятностей, взятая с обратным знаком:
ns
H ( X ) pi loga pi .
(9.1)
i 1
Логарифм в формуле (9.1) может быть взят при любом
основании a > 1. Перемена основания равносильна простому
умножению энтропии на постоянное число, выбор основания
равносилен выбору определенной единицы измерения. На практике
используют логарифмы с основанием 2 и измеряют энтропию в
двоичных единицах (битах). В дальнейшем мы будем под символом
log понимать двоичный логарифм.
В результате получения сведений о системе, например, при
выполнении проверок объекта, энтропия системы уменьшается.
Степень ее уменьшения количественно определяет информацию о
системе I x . Полная информация о состоянии системы X
I x H( X ) 0,
откуда
I x H ( X ),
(9.2)
т.е. количество информации, получаемое при определении
фактического состояния системы, равно первоначальной энтропии
этой системы.
При определении фактического состояния диагностируемого
объекта, т.е. при поиске дефекта, энтропия системы уменьшается за
счет проведения проверок и получения их конкретных результатов.
132
Таким образом, любая j-я проверка характеризуется количеством
получаемой при ее проведении информации, или показателем
информативности I ( j ) .
Поскольку каждая проверка может иметь заранее неизвестный
исход из двух возможных (1 или 0), показатель ее информативности
по отношению к первоначально неопределенной системе можно
представить на основании теоремы сложения энтропий как
I ( j ) H ( X , 1j ) H ( X , 0j )
( p( 1j ) log p( 1j ) p( 0j ) log p( 0j )) ,
где
(9.3)
H ( X , 1j ) часть энтропии системы X, соответствующая
возможному результату j-й проверки ―1‖; H ( X , 0j ) часть
энтропии системы X, соответствующая возможному результату j-й
проверки ―0‖; p( 1j ) p( S i ) вероятность получения резульS i E1j
тата j-й проверки ―1‖; p( 0j ) p( S i ) вероятность получения
S i E 0j
результата j-й проверки ―0‖; E 1j , E 0j совокупности состояний
объекта, для которых j-я проверка дает результаты соответственно
―1‖, ―0‖.
На основании рассмотренных положений может быть
предложена простая процедура составления оптимальной по числу
проверок программы поиска дефекта.
В соответствии с указаниями, рассмотренными в § 9.2,
составляются структурная схема объекта и таблица его возможных
состояний S i , дополненная столбцом, содержащим значения
вероятностей состояний p( S i ) .
На первом этапе рассматривают показатели информативности
всех разрешенных проверок для диагностируемого объекта,
используя формулу (9.3). При этом разрешенной проверкой считается
технически реализуемая проверка, дающая для рассматриваемой
совокупности состояний объекта различные результаты ( в столбце
таблицы состояний, соответствующем разрешенной проверке для
рассматриваемых состояний, имеются значения как 1, так и 0).
133
В качестве начальной проверки (проверки первого уровня)
выбирается проверка k с наибольшим значением показателя
информативности. Если две или несколько проверок имеют
одинаковое наи-большее значение I(j), то в качестве начальной
выбирается проверка с наименьшим значением стоимости и времени
проведения или любая из них при отсутствии информации о затратах.
На втором этапе все возможные состояния объекта разбивают на
две совокупности E k1 и E k0 , соответствующие возможным
результатам установленной начальной проверки k , для каждой из
них так же, как на первом этапе, устанавливают наиболее
информативные проверки второго уровня 1k ,l и k0 ,m . Здесь
обозначения 1k ,l и k0 ,m показывают, что соответственно l-я и m-я
проверки проводятся после получения результата k-й проверки 1 и 0.
На третьем этапе аналогичным образом устанавливают наиболее
информативные проверки третьего уровня, но уже для четырех
совокупностей
состояний
объекта
E k11,l ; E k10,l ; E k01,m ; E k00,m ,
соответствующих возможным результатам проверок второго уровня,
проводимых после проверки первого уровня.
Процедуру поэтапного определения наиболее информативных
проверок продолжают до тех пор, пока все совокупности состояний
объекта, определяемые результатами последовательно проводимых
проверок, не выродятся в состояния S i , т.е. пока не будут
установлены наиболее короткие последовательности проверок,
необходимые для нахождения всех возможных дефектов.
Количество первоначально рассматриваемых проверок можно
сократить по результатам анализа таблицы попарной различимости
состояний объекта, оставив число проверок, минимально
необходимое для различимости всех пар состояний.
Целесообразно программу поиска дефекта по рассматриваемому
методу оформлять в виде дерева решений, что значительно упрощает
процедуру и делает ее более наглядной.
Дерево решений представляет собой неориентированный
связанный граф, не содержащий контуров. Начальная вершина
определяет проверку первого уровня и ей в соответствие ставится
множество всех возможных состояний объекта. Внутренние вершины
определяют проверки последующих уровней и им в соответствие
ставятся подмножества состояний объекта, получаемых по
результатам соответствующих последовательностей проверок.
134
Конечные (висячие) вершины определяют возможные состояния
объекта.
Среднестатистическое число проверок, необходимых для
определения любого возможного дефекта (состояния объекта),
рассчитывается как
k
m cp l
p( S i ) ,
(9.4)
l 1 Si El
где k число уровней дерева решений (этапов разработки
программы); l номер уровня (этапа); E l совокупность висячих
вершин, получаемых по результатам проверок l-го уровня (число
дефектов определяемых проверками на l-м этапе).
Пример разработки оптимальной программы поиска на базе
информационного алгоритма рассмотрен в приложении 2.
§ 9.4. Методы последовательных групповых проверок на базе
экономических и информационно-экономических алгоритмов
В качестве экономических показателей, характеризующих
процесс поиска дефектов, используются такие показатели, как
стоимость проверки c j и продолжительность ее проведения t j . В
зависимости от конкретных условий и требований оптимизация
программы поиска дефектов может быть также проведена по
критерию наименьшей среднестатистической стоимости ( C min ) или
по критерию наименьшей среднестатистической продолжительности
( Tmin ) процесса поиска дефекта.
m
C min c( Ak )min c j p( S i
j 1 Si Ej
) , k 1, na ;
min
(9.5)
m
Tmin t ( Ak )min t j p( S i
j 1 Si E j
) , k 1, na ,
min
(9.6)
135
где
среднестатистическая
стоимость
и
c( Ak ), t ( Ak )
среднестатистическая продолжительность поиска дефекта по
программе (дереву решений) Ak ; na число всех возможных
вариантов программы (деревьев решений); c j , t j стоимость и
продолжительность выполнения j-й проверки; m число всех
возможных проверок; E j совокупность состояний объекта,
поставленных в соответствие j-й проверке.
Выбор оптимального варианта Ak по значениям C min или Tmin
может быть произведен посредством полного перебора результатов
расчета по выражениям (9.5) и (9.6). Однако для сложных объектов
такой путь нерационален ввиду очень большого числа возможных
вариантов. В этих случаях гораздо эффективней задача оптимизации
программы поиска дефекта решается с использованием комплексных
показателей проверок информационно-стоимостного I c ( j ) или
информационно-временного I t ( j ) .
Ic ( j )
It ( j )
где
I( j )
c( j )
I( j )
t( j )
;
(9.7)
,
(9.8)
c( j ), t ( j ) относительная стоимость и относительная
продолжительность каждой j-й проверки.
m
c( j ) c j ci ;
(9.9)
t( j ) t j ti ,
(9.10)
i 1
m
i 1
где m число всех возможных проверок; ci , t i стоимость и
продолжительность каждой i-й проверки в натуральном выражении.
Разработка программ поиска дефекта при этом производится
способом, аналогичным описанному в предыдущем параграфе, но
проверки, проводимые на каждом этапе (уровне дерева решений),
136
устанавливаются по наибольшим из возможных значений I c ( j ) или
It ( j ) .
§ 9.5. Расчет значений вероятностей возможных состояний объекта
Вероятность
состояния
объекта
характеризует
p( S i )
вероятность отказа объекта из-за отказа лишь одного (i-го) элемента.
Она представляет собой условную вероятность вида p( Ai /B ) , где
Ai событие, заключающееся в отказе лишь одного i-го элемента
(при работоспособности остальных); B событие, заключающееся в
отказе объекта.
Поскольку все возможные состояния образуют полную группу
несовместных событий, для расчета их вероятностей используем
формулу Байеса
p( Ai / B )
p( Ai ) p( B / Ai )
n
,
(9.11)
p( Ai ) p( B / Ai )
i 1
где n число элементов.
Условные вероятности p( B / Ai ) 1, ввиду того, что событие
отказа объекта рассматривается как достоверное, поскольку поиску
дефекта в объекте предшествует установление факта его
неработоспособности.
Тогда
n
p ( Ai / B ) p( Ai )( p( Ai ))1 .
(9.12)
i 1
По определению событие Ai представляет собой произведение
двух
независимых
событий
отказа
i-го
элемента
и
работоспособности всех элементов кроме i-го. На основании теоремы
умножения вероятностей для объекта с основным соединением
элементов в структурной логической схеме
137
p( Ai ) q i ( t ) pk ( t )
k( 1,n )
k i
qi ( t )
Pc ( t ) ,
pi ( t )
(9.13)
где qi ( t ), pi ( t ) вероятность соответственно отказа и безотказной
работы i-го элемента; Pc ( t ) вероятность безотказной работы
системы (объекта).
Подставляя выражение (9.13) в формулу (9.12), получаем
расчетную формулу для определения вероятности состояния объекта,
характеризуемого отказом i-го элемента, в виде
qi ( t ) n qi ( t )
p( S i ) p( Ai / B )
1 q i ( t ) i 1 ( 1 q i ( t )
1
(9.14)
или в виде
1
1 pi ( t ) n 1 pi ( t )
.
p( S i )
pi ( t ) i 1 pi ( t )
(9.15)
В случае использования в объекте высоконадежных элементов с
pi ( t ) 1,0 , что обычно имеет место на практике, вместо формул
(9.14) или (9.15) можно использовать выражения:
n
p( S i ) q i ( t ) q i ( t ) ;
(9.16)
i 1
n
p( S i ) ( 1 pi ( t )) ( 1 pi ( t )) .
(9.17)
i 1
При экспоненциальном законе распределения
безотказной работы элементов и малых значениях t
p( S i )
1 exp( i t )
n
i
n
( 1 exp( i t )) i
i 1
i 1
138
.
времени
(9.18)
§ 9.6. Особенности поиска дефектов в объектах дискретного
действия
Если в состав диагностируемого объекта входят один или более
элементов дискретного действия, процедура поиска отказавшего
элемента разрабатывается на базе ранее рассмотренных методов и
критериев оптимизации. Некоторые особенности проведения
проверок и анализа их результатов на выходе элементов дискретного
действия рассмотрены в § 8.3.
Существенно отличные принципы поиска дефекта имеют место
лишь в тех случаях, когда сам объект диагностирования в целом
представляет собой объект дискретного действия или когда дефект
ищется в пределах элемента дискретного действия. В этих случаях
обычно используют тестовое диагностирование, или тестовую
диагностирующую программу, предусматривающую подачу на вход
объекта некоторой заранее установленной последовательности
тестовых воздействий и анализ реакции объекта на них по виду
выходных сигналов.
Вид и минимально необходимое число входных векторов
устанавливают такими же способами, как при контроле
работоспособности объектов дискретного действия. Отличия
заключаются в том, что реакция объекта проверяется на всю входную
последовательность. При этом производится сравнение фактической
и эталонной матриц выходных сигналов (матриц реакций) по суммам
их элементов по строкам и столбцам. Так, эталонная матрица реакций
для примера, рассмотренного в § 8.3, имеет вид
y11
y
Y Э 21
y n1
y12
y 22
y n2
y1m
y 2 m 1 1 1
.
0 0 0
y nm
Сумма элементов по столбцам 111, по строкам — 110 или в
десятеричной системе соответственно 7 и 6.
При возникновении дефекта типа 11 (―const 1‖ в первом
элементе) матрица реакций принимает вид
1 1 1
Y11
.
1
1
0
139
Для нее сумма элементов по столбцам 1101, по строкам — 1000
или в десятеричной системе соответственно 13 и 8.
Разности полученных для эталонной и фактической матриц
сумм элементов (13–7) и (8–6) определяют вид дефекта.
Обычно операции поиска дефекта в объекте дискретного
действия и контроля его работоспособности объединяют в одну.
Глава 10.
ПРОГНОЗИРОВАНИЕ ТЕХНИЧЕСКОГО СОСТОЯНИЯ
§ 10.1. Основные понятия о техническом прогнозировании
В технической диагностике прогнозирование изменения
состояния объекта заключается в оценке его возможного состояния на
некоторый определенный момент времени в будущем на основании
известной информации об изменениях, происходивших в прошлом, и
результатов определения фактического состояния в настоящий
момент времени.
Изменение технического состояния определяется характером
изменения свойств объекта в связи с постоянно протекающими
процессами внутренних деградационных изменений и физикохимических превращений под влиянием воздействий внешней среды
и режимов использования. При этом наблюдается непрерывное или
дискретное изменение признаков, характеризующих эти свойства, что
приводит к перемещению вектора состояния объекта в области
работоспособных состояний S1 к ее границе по некоторой
траектории. Задача прогнозирования в общем случае заключается в
предсказании вида такой траектории. Воздействия, прикладываемые к
объекту, можно разделить на три категории: неизменные по величине
или характеру, изменяющиеся известным образом, изменяющиеся
случайным образом. При этом характер изменения свойств, а
соответственно и состояние объекта во времени, может быть описан
зависимостью
140
F ( Z , t ) A( Z , t ) X ( Z , t ),
(10.1)
где A( Z , t ); X ( Z , t ) соответственно детерминированная и
случайная составляющие процесса.
Если степень влияния второй составляющей в выражении (10.1)
незначительна, процесс изменения состояния объекта описывают как
детерминированный, в противном случае его необходимо
рассматривать как случайный. Выбор того или иного подхода
производится по результатам анализа внешних условий и режимов
использования объекта. Так, например, процесс изменения свойств
силового трансформатора, установленного в сухом отапливаемом
помещении на берегу и работающего в стационарном режиме, можно
с
большой
степенью
достоверности
описывать
как
детерминированный. Процесс изменения свойств электропривода
судовой грузовой лебедки может рассматриваться только как
случайный.
Этим
объясняется
использование
в
техническом
прогнозировании двух принципов детерминированного и
вероятностного. В первом случае результатом прогноза являются
непосредственные значения искомых параметров, во втором их
вероятностные оценки.
Для решения задачи прогнозирования время использования
объекта разделяют на два интервала: T1 интервал наблюдения за
состоянием объекта (в прошлом и настоящем) и T2 интервал, на
котором осуществляется прогнозирование (в будущем). Чем больше
интервал T1 , тем больше объем информации о характере процесса
изменения состояния объекта и тем достовернее прогноз. Однако
увеличение интервала наблюдения приводит к увеличению затрат,
связанных с экспериментальными исследованиями и обработкой
результатов диагностирования. Достоверность прогноза также
зависит от заданного момента времени в области T2 .
Основными методами решения задач прогнозирования являются
методы экстраполяции, регрессионного анализа и статистической
классификации.
При экстраполяции реализуется принцип переноса на будущее
тенденций прошлого. При этом изменение состояния объекта
определяется значениями его детерминированных или вероятностных
характеристик в области наблюдения. Процедура прогнозирования
141
включает в себя анализ результатов наблюдения, построение
аналитических выражений, связывающих результаты наблюдения
(интерполяцию), и расчет искомых показателей прогноза с помощью
полученных выражений. При этом предполагают, что условия использования объекта в области наблюдения в дальнейшем остаются
неизменными или изменяются по известному закону.
Методы регрессионного анализа позволяют получать для
группы одинаковых исследуемых объектов среднестатистические
зави-симости диагностических параметров от времени, на основании
которых и рассматривается оценка прогноза.
Прогнозирование методами статистической классификации
предполагает предварительную систематизацию исследуемых объектов по характерным признакам с разбивкой их состояний на классы,
соответствующие определенным наборам значений диагностических
параметров в области наблюдения. Формирование классов требует
выполнения большого объема экспериментальных исследований, направленных на установление зависимостей, связывающих состояния
объектов и значения диагностических параметров. Такие
исследования трактуются как обучение.
Задача прогнозирования может решаться в прямой постановке,
когда производится оценка работоспособности объекта в заданные
моменты времени в области прогноза T2 , и в обратной постановке,
когда производится оценка моментов времени в области T2 ,
соответствующих заданным значениям степени работоспособности
объекта.
§ 10.2. Детерминированное прогнозирование
При решении задачи детерминированного прогнозирования в
прямой постановке искомыми характеристиками являются значения
диагностических параметров z i ( t n m ), j 1, s ; m 1, k T2 и запас
работоспособности объекта
z j ( t n m ) z j доп
min
, где s число
диагностических параметров; t n последнее (граничное) значение
времени в области T1 ; t n k последнее (граничное) значение
времени в области T2 . При решении задачи прогнозирования в
обратной постановке искомыми характеристиками являются значения
142
времени в области
соответствующие заданным
T2 t n m ,
величинам степени работоспособности объекта. Поскольку получение аналитических зависимостей и формирование классов при
большом
числе
диагностических
параметров
связано
со
значительными сложностями, для прогнозирования устанавливают их
минимум из условия обеспечения требуемой достоверности прогноза.
На практике используют обычно один диагностический параметр
определяющий или обобщенный.
Тогда зависимость (10.1) принимают простой вид
(10.2)
z( t ) f ( t ) .
Однако получение такого аналитического выражения удается
весьма редко. Чаще всего вместо неизвестной зависимости (10.2)
используют различные формы ее аппроксимации, например, полином
вида
F ( a , t ) a 0 a1 t a 2 t 2 ... a t ,
(10.3)
где a j f j (z), j 0,
Коэффициенты такого полинома можно в общем случае найти
по результатам эксперимента, используя метод наименьших квадратов, для чего необходимо решать систему из ( 1 ) уравнений:
Q
0, j 0, .
a j
(10.4)
Здесь
n
Q ( z( t i ) F ( a , t )) 2 ,
(10.5)
i 0
где n число моментов времени наблюдения при проведении
эксперимента (число измеряемых значений z( t i ) в области T1 ).
Задача расчета прогноза существенно упрощается при
использовании стандартных интерполяционных формул Лагранжа,
Ньютона, Стирлинга, Бесселя и др.
Интерполяционный многочлен Лагранжа, соответствующий
виду выражения (10.3) и представляющий собой аппроксимацию
зависимости (10.2), имеет вид
143
z( t )
( t t1 )( t t 2 )...( t t n )
z( t 0 )
( t 0 t1 )( t 0 t 2 )...( t 0 t n )
( t t 0 )( t t 2 )...( t t n )
z( t1 ) ...
( t1 t 0 )( t1 t 2 )...( t1 t n )
( t t 0 )( t t1 )...( t t n 1 )
z( t n ) ,
( t n t 0 )( t n t1 )...( t n t n 1 )
(10.6)
где z( t 0 ), z( t1 ),..., z( t n ) значения диагностического параметра,
измеренные в моменты времени t1 , t 2 ,...,t n .
При условии проведения наблюдений через одинаковые отрезки
времени (шаги) t t i t i 1 const и выражении моментов
наблюдения через порядковые номера шагов ( t i t i / t , i 0 , n )
формулу (10.6) можно представить как
i
t ( t 1 )...( t n ) n
i C n z( t i )
z ( t ) ( 1 )
.
( 1 )
n!
t i
i 0
n
(10.7)
При расчете в общем случае прогноза на некоторый m-й момент
времени в области T2 t t n m видно, что коэффициенты при
значениях z( t i ) , называемые коэффициентами Лагранжа, зависят
лишь от значений m и = n. Они могут быть заранее рассчитаны и
сведены в специальные таблицы по типу табл.10.1.
В
окончательном,
удобном
для
использования
при
прогнозировании виде интерполяционная формула Лагранжа может
быть выражена как
z n m L0 z n L1 z n 1 ... L z n Li z i n ,
(10.8)
i 0
где Li Li ( , m ) коэффициенты Лагранжа; степень
аппроксимирующего полинома; m число шагов прогноза в области
T2 ; n число шагов в области наблюдения T1 .
С учетом условий, принятых при выводе формулы (10.8),
интерполяционная формула Ньютона имеет вид
144
z n m z n z n1 N 1 2 z n 2 N 2 3 z n3 N 3 ... z n N , (10.9)
где
N 1 , N 2 ,..., N
значения
коэффициентов
Ньютона,
рассчитанные для определенных величин и m (табл.10.2);
k z nk , ( k 1, ) конечные разности k-го порядка.
. . . . . . . . . . .
2
z n1 z n1 z n 2 ;
2 z n 2 z n 2 z n 3 ;
. . . . . . . . . . .
1
1
z n z n 1 z n .
z n 1 z n z n1 ;
z n 2 z n 1 z n 2 ;
(10.10)
Таблица 10.1
Значения коэффициентов Лагранжа
Число
шагов
прогноза
m
1
2
3
4
5
6
7
8
9
10
Степень полинома
=1
L0
-1
-2
-3
-4
-5
-6
-7
-8
-9
-10
L1
2
3
4
5
6
7
8
9
10
11
=2
L0
1
3
6
10
15
21
28
36
45
55
L1
-3
-8
-15
-24
-35
-48
-63
-80
-99
-120
145
=3
L2
3
6
10
15
21
28
36
45
55
66
L0
-1
-4
-10
-20
-35
-56
-84
-120
-165
-220
L1
4
15
36
70
120
189
280
396
540
715
L2
-6
-20
-45
-84
-140
-216
-315
-440
-594
-780
L3
4
10
20
35
56
84
120
165
220
286
Таблица 10.2
Значения коэффициентов Ньютона
m
1
2
3
4
5
N1
1
2
3
4
5
N2
1
3
6
10
15
N3
1
4
10
20
35
m
6
7
8
9
10
N1
6
7
8
9
10
N2
21
28
36
45
55
N3
56
84
120
165
220
Достоверность прогнозирования может быть повышена путем
учета при построении аппроксимирующей зависимости всех
результатов наблюдений в области T1 . Наиболее удобным в этом
случае является представление такой зависимости в виде полинома
z( t ) b0 p0 ( t ) b1 p1 ( t ) ... b p ( t ) ,
где p0 ( t ), p1 ( t ) ,... ортогональные многочлены
Коэффициенты при них вычисляют по формуле
(10.11)
Чебышева.
n
bj
zi p j ( ti )
i 1
n
,
(10.12)
p 2j ( t i )
i 1
где j=0,1,2,... порядковый номер коэффициента b j ; n число
моментов времени измерения диагностического параметра z.
Формулы для расчета ортогональных многочленов Чебышева до
третьего порядка:
p0 ( t ) 1;
(10.13)
p1 ( t ) t t ;
(10.14)
p2 ( t ) t 2
n
n
i 0
n
i 0
t i3 t t i2
t i2 nt 2
i 0
146
p1 ( t )
1 n 2
ti ;
n i 0
(10.15)
n
p3 ( t ) t
3
p2 ( t i )
t i3
i 1
n
i 0
где
t
p 22 ( t i
n
p2 ( t )
t i3 p1 ( t i )
i 0
n
p12 ( t i )
)
1 n 3
p1 ( t ) t i , (10.16)
n i 0
i 0
1 n
ti .
n i 0
Упростим выражение (10.11), приняв условие ti – ti–1 t
const и произведя замену переменной t на u (( t t ) / t ) x x ,
где x t / t i время, выраженное в числе шагов; x t / t
n / 2.
Одновременно расширим его информационные возможности с
учетом наблюдений в общем случае не за одним, а за k одинаковыми
объектами в одинаковых условиях.
Полином (10.11) при этих условиях записывают как уравнение
регрессии
z i c 0 p0 ( u ) c1 p1 ( u ) ... c p ( u ) .
(10.17)
Его коэффициенты c i , j 0 , рассчитываются по выражению
n
cj
z i p j ( ui )
i 0
n
i 0
,
p 2j ( u i
(10.18)
)
1 k
z ij среднее значение результатов измерения
k j 1
диагностического параметра для k объектов; p0 ( u ) 1; p1 ( u ) u .
Для расчета многочленов p j ( u ) при j 2 в справочной
где
zi
литературе приводятся простые формулы и таблицы при конкретных
значениях шагов наблюдений n, аналогичные табл.10.3.
Прогноз
значения
диагностического
параметра
по
аппроксимирующему
выражению
(10.17)
для
m-го
шага
прогнозирования рассчитывается при x = n + m.
147
Степень аппроксимирующих полиномов выбирают, исходя из
условия:
z i z ip
(10.19)
доп ,
zi
max
где zi , zip соответственно измеренные и рассчитанные по формулам (10.8), (10.9) или (10.17) значения диагностического параметра на
i-м шаге в области наблюдений T1 .
Таблица 10.3
Значения ортогональных многочленов Чебышева
n
x
p2(u)
p3(u)
p4(u)
p5(u)
4
2
u2 2
u 3 175 u
—
—
5
2,5
35
u 2 12
u 3 101
u
20
95 2
81
u 4 14
u 16
—
6
3
u2 4
u 3 7u
u 4 67
u 2 72
7
7
u 5 353 u 3 524
u
21
7
3,5
u 2 21
4
u 3 374 u
u 4 179
u2
14
297
16
u 5 956 u 3 15709
u
336
8
4
u 2 203
u 3 595 u
u 4 115
u2
7
216
7
u 5 185
u 3 716
u
9
9
9
4,5
u 2 334
u 3 293
u
20
u 4 41
u 2 3861
2
80
u 5 155
u 3 6067
u
6
48
10
5
u 2 10
u 3 895 u
u 4 25u 2 72
u 5 953 u 3 572
u
3
Если
не
удается
установить
один
определяющий
диагностический признак для объекта в целом, прогнозирование
проводят по его элементам, всем или наиболее ответственным. В этом
случае работоспособность объекта в области T2 оценивается по
наихудшему из полученных результатов.
§ 10.3. Вероятностное прогнозирование
Задача вероятностного прогнозирования сводится к оценке
показателей надежности объекта в заданные моменты времени
области T2 . При этом процедура прогнозирования и достоверность
148
получаемых результатов в большой степени определяются объемом
исходной информации о надежности объекта и его элементов.
Так, например, если известен вид и основные параметры закона
распределения времени безотказной работы объекта, прогноз
показателей безотказности может быть получен с учетом
фактической наработки по выражениям, приведенным в § 2.4. При
этом для наиболее распространенных экспоненциального и
нормального законов распределения вероятность безотказной работы
рассчитывается соответственно по формулам (4.5) и (4.15).
Более универсальным является метод прогнозирования,
основанный на контроле диагностических параметров. Для расчета
прогноза вероятности безотказной работы объекта при этом в
зависимости от наблюдаемой тенденции изменения диагностических
параметров используются обобщенные выражения (4.16), (4.18) или
(4.20).
При случайном характере изменения состояния объекта и,
следовательно, его диагностических параметров вероятностный
прогноз может быть рассчитан лишь по результатам наблюдений за
группой одинаковых объектов, работающих в одинаковых или
схожих условиях. В основе расчета лежит то обстоятельство, что
характеристики положения случайного процесса представляют собой
неслучайные функции времени.
Таким образом, прогнозирование проводится в два этапа. На
первом этапе рассчитывается прогноз для математического ожидания
и дисперсии определяющего диагностического признака на заданный
момент времени в области T2 . На втором этапе по этим значениям
рассчитывается вероятность безотказной работы или вероятность
отказа объекта.
Предварительно для каждого i-го момента времени наблюдения
в области T1 по результатам измерения диагностического признака у
k объектов рассчитывают статистические оценки:
k
ˆ (t ) z (t ) 1 z (t )
M
z i
i
j i
k j 1
;
(10.20)
1 k
σ̂ (t i ) s (t i )
(z j (t i ) z(t i )) 2 ;
k 1 j 1
(10.21)
sz (t i ) sz2(t i ) ,
(10.22)
2
z
2
z
149
где i 0 , n ; n число моментов времени наблюдения.
Используя ранее рассмотренные методы экстраполяции,
рассчитывают прогноз этих оценок на момент времени t n m
z ( t n m ) и s( t n m ).
При нормальном законе распределения измеренных в каждый
момент времени значений диагностических параметров z j , что
практически всегда имеет место, в зависимости от тенденции
изменения z ( t i ) вероятность безотказной работы на момент времени
t t n m рассчитывают по формулам (4.17), (4.19) или (4.21) при
соотношениях:
u1
z max z ( t n m )
;
s z ( t n m )
(10.23)
u2
z min z ( t n m )
,
s z ( t n m )
(10.24)
где zmax , zmin соответственно максимальное и минимальное
предельно допустимые (отказовые) значения диагностического
параметра.
Можно непосредственно по формулам (4.17), (4.19) или (4.21)
рассчитать значения вероятности безотказной работы объекта p( t i ) в
области наблюдения T1 и затем, используя выражения вида (10.8),
(10.9) или (10.17), найти значение вероятности безотказной работы на
m-м шаге прогнозирования P ( t n m ) .
Если при вероятностном прогнозировании не удается
установить один определяющий диагностический параметр для
объекта в целом, прогнозирование проводят по его элементам. В этом
случае показатели надежности объекта в области T2 рассчитываются
в зависимости от вида структурной логической схемы объекта
(см. гл.4).
150
Глава 11.
ПРИНЦИПЫ РАЗРАБОТКИ ДИАГНОСТИЧЕСКОГО
ОБЕСПЕЧЕНИЯ
§ 11.1. Содержание диагностического обеспечения
При проектировании современных электротехнических систем
одновременно с проектированием основного объекта, определяющего
функциональное назначение системы, решается задача обеспечения
его оптимальной контролепригодности. Другими словами, объект
проектируется непосредственно в составе системы диагностирования.
При этом на долю специалиста по технической диагностике
приходится
разработка
диагностического
обеспечения,
проектирование
технических
средств
диагностирования
и
деятельности человека - оператора.
Процедура
разработки
диагностического
обеспечения
предусматривает решение следующих задач:
1) формирование адекватной диагностической модели объекта,
устанавливающей связи между ожидаемыми воздействиями и изменяющимися свойствами, характеризуемыми количественными признаками;
2) определение на основании анализа диагностической модели
совокупности диагностических признаков, их ранжирование и
установлениеммпредельно допустимых для работоспособного
состояния объекта (граничных) значений;
3) определение условий работоспособности и признаков
дефектов;
4) построение алгоритмов и разработка программ определения
работоспособности, поиска дефектов и прогнозирования изменения
состояния объекта.
Выбор вида диагностической модели должен проводится с учетом особенностей функционирования и использования объекта, а
также вида и объема решаемых диагностических задач. При этом способ рационального описания (представления) объекта в наибольшей
степени связан со структурой объекта, т.е. его составом, характером и
видом связей между отдельными элементами. В этом случае
диагностические модели можно условно поделить на следующие
группы:
151
непрерывные модели, описывающие объект и протекающие
процессы в непрерывно меняющемся времени, которое является
аргументом определенных функций; они представляют собой алгебраические или дифференциальные линейные и нелинейные уравнения, включая передаточные функции и характеристические уравнения;
дискретные модели, описывающие состояние объекта для
последовательности дискретных значений времени, как правило, без
учета процессов, протекающих в промежутках; эти модели представляют собой конечно-разностные уравнения или конечные автоматы и
используются для описания цифровых и импульсных устройств;
гибридные модели, описывающие объекты, имеющие в своем
составе элементы как непрерывного, так и дискретного действия;
специальные модели, к которым относятся функциональные,
информационные и модели характеристик.
В качестве функциональных диагностических моделей
используют структурные схемы, диаграммы прохождения сигналов,
диаграммы
причинно-следственных
связей,
алгоритмы
функционирования.
Некоторые
виды
функциональных
диагностических моде-лей рассмотрены в гл.9.
Информационные диагностические модели представляют собой
диаграммы информационных потоков и информационные описания
процессов изменения состояния объекта, а модели характеристик —
совокупности статических и динамических характеристик объекта
для различных режимов функционирования и использования с учетом
возможных изменений его состояния.
Особое место среди различных видов диагностических моделей
занимают модели физические. Их основное назначение
проведение экспериментальных исследований процессов изменения
некоторых специфических свойств отдельных элементов или узлов
объекта таких, например, как механическая или термическая
прочность, износостойкость, диэлектрическая прочность и т.п.
Разработка физических моделей должна быть направлена в первую
очередь на их конструктивное упрощение при безусловном
обеспечении физического подобия моделируемых процессов
реальным. В качестве примера таких моделей, широко используемых
на практике, можно привести образцы материала простой
конфигурации (цилиндры, прямоугольные параллелепипеды), отрезки
кабелей, элементы конструкций элек-трических машин (моторетты).
152
Построение и анализ диагностических моделей могут
выполняться на базе различных расчетных методов. К основным из
них относятся аналитические, графические и графоаналитические.
Аналитические
методы
дают
возможность
решать
оптимизационные задачи и получать необходимые соотношения
между состояниями объекта, диагностическими параметрами и
показателями качества функционирования в аналитическом виде. К
аналитическим методам построения и анализа диагностических
моделей относят методы малого параметра, теории чувствительности,
планирования эксперимента, распознавания образов, математической
логики.
Графические методы используются для решения некоторых
частных задач и, в основном, для иллюстрации процедуры анализа
аналитическими и графоаналитическими методами. Наиболее широко
применяются методы, основанные на теории графов.
Графоаналитические методы представляют собой комбинации
аналитических и графических методов. Они базируются на аппарате
теории множеств и теории графов. При их реализации широко
используются такие виды представления результатов, как табличный
и матричный. Характерным примером диагностических моделей в
графоаналитической форме являются описания марковских процессов
состояний объекта, рассмотренные в § 5.6.
Совокупности диагностических параметров, определяемые по
результатам анализа диагностической модели объекта, зависят от
постановки задачи диагностирования и могут быть разбиты на
группы: совокупность диагностических параметров для проверки
правильности функционирования, для контроля работоспособности,
для поиска дефекта, для прогнозирования изменения состояния
объекта.
Критериями выбора диагностических параметров каждой
группы являются степень их информативности о состоянии объекта,
степень достоверности оценки процесса изменения контролируемого
свойства (свойств) объекта, чувствительность к изменению
контролируемого свойства (свойств), объекта, оперативность и
стоимость измерения.
Состав совокупностей диагностических признаков по каждой
группе должен быть минимальным при условии их достаточности для
обеспечения
заданной
величины
вероятности
правильного
диагностирования.
153
Условия работоспособности объекта и граничные значения
диагностических признаков устанавливают, исходя из заданных
требований по его безотказности и долговечности.
§ 11.2. Непрерывные аналитические модели
При аналитическом моделировании объект в общем случае
(см. рис.7.1) рассматривается как преобразователь входных
воздействий X и W в выходные Y и R и может быть описан в
векторно-матричной форме уравнением вида
Y , R A( X ,W ),
(11.1)
где A оператор преобразования, структура и параметры которого
определяют как форму преобразования, так и состояние объекта.
В простейшем случае, когда моделируются статические
процессы функционирования объекта в расчетных условиях
эксплуатации, уравнение (11.1) может быть представлено системой
алгебраических уравнений
Y AX ,
(11.2)
где Y y i , ( i 1, m ) совокупность выходных рабочих сигналов;
X x i , ( j 1, n ) совокупность входных рабочих воздействий;
A оператор преобразования в матричной форме A a ij .
a ij const , то объект описывается линейными
Если
алгебраическими уравнениями, если a ij f ( X ) , объект описывается
нелинейными алгебраическими уравнениями.
Основной задачей анализа таких моделей является определение
коэффициентов aij , которые непосредственно связаны с параметрами
элементов объекта и могут использоваться в качестве прямых
диагностических
признаков.
Например,
для
объекта,
представляющего собой электрическую цепь постоянного тока с
сопротивлением R, напряжением на входе U и током I, уравнение
(11.2) имеет вид
154
I
1
U,
R
где 1/R электрическая проводимость цепи может
использоваться
как
прямой
диагностический
параметр,
характеризующий ее состояние.
При моделировании динамических процессов в расчетных
эксплуатационных условиях уравнения (11.1) представляют собой
систему дифференциальных уравнений вида
i
d k yi ( t ) n
a ik
bij x j ( t ), ( i 1, m )
dt k
k 0
j 1
(11.3)
с некоторыми начальными условиями y i ( 0 ) c i , где i порядок
i-го дифференциального уравнения.
Если коэффициенты a ik и bij постоянны, уравнения (11.3)
описывают поведение линейного объекта с сосредоточенными
параметрами. В случае зависимости этих коэффициентов от времени,
уравнения описывают поведение линейного объекта с переменными
параметрами. Если коэффициенты зависят от значений сигналов, т.е.
a ik a ik ( y i ) и bij bij ( y j ) , уравнения описывают нелинейный
объект.
Для объектов, представляющих собой непрерывные линейные
системы, систему дифференциальных уравнений (11.3) обычно
записывают в виде
dyi m
a ij ( t ) y j x i ( t ), y i ( 0 ) c i ,
dt j 1
(11.4)
где xi ( t ) функция входного сигнала, определяющая i-й выходной
сигнал.
В векторно-матричной форме это соответствует выражению
dy
A( t )Y X ( t ), Y ( 0 ) C ,
dt
155
(11.5)
где X ( t ),Y , C являются m-мерными векторами-столбцами; A(t)
матрица порядка m m .
В зависимости от вида получаемых уравнений при анализе
диагностической модели используют соответствующие методы
анализа дифференциальных уравнений.
Простым примером такой модели является уравнение,
описывающее реакцию электрической цепи с последовательно
включенными резистивным и индуктивным элементами с
параметрами R и L при подаче на вход сигнала u U 0 1( t ) :
R iL
di
U0 ,
dt
в котором коэффициенты R и L представляют собой прямые
диагностические параметры.
Для сложных объектов уравнения (11.3) имеют высокий
порядок, что затрудняет их анализ или вообще делает его
невозможным известными методами. В этих случаях целесообразно в
качестве диагностических моделей использовать передаточные
функции вида
Y ( s ) bm s m bm 1 s m 1 ... b1 s b0
W(s)
X ( s ) a n s n a n1 s n1 ... a1 s a 0
(11.6)
или характеристические уравнения вида
a n s n a n1 s n1 ... a1 s a0 0 ,
(11.7)
где s оператор преобразования Лапласа.
Анализ диагностических моделей такого вида позволяет не
только определить основные диагностические параметры, но и
установить их граничные значения по заданным условиям
расположения полюсов в комплексной плоскости или по частотным
характеристикам.
Порядок выражений (11.6) и (11.7) можно легко понизить до
минимально возможного, используя известные математические
приемы [9].
156
Характерный
особенностью
электротехнических
систем
является то, что большая часть их элементов может быть
представлена в виде электрических схем замещения, по которым и
составляются диагностические модели.
Еще одним видом аналитической модели может служить
совокупность
функций
чувствительности,
характеризующих
чувствительность выходных и промежуточных сигналов объекта к
изменению параметров его элементов. Функции чувствительности
обычно используют при определении допусков на изменение
параметров элементов, а также для установления пределов
регулирования и синтеза систем автоматического регулирования.
Чувствительность характеристики цепи y y( x1 , x 2 ,..., x n ) , где
x i параметры элементов цепи; y выходной сигнал, определяется
по формуле
S i y x i S i ( y , x i ).
(11.8)
Отклонение характеристики цепи при x i x i 0 x i
n
y S i x i .
i 1
Относительная чувствительность цепи к изменению параметра
x i на величину x i определяется выражением
S 0i
ln y x i
S i S 0i ( y , x i ) .
ln x i
y
(11.9)
При этом величина относительного отклонения выходного сигнала
y
y
n
xi
i 1
yi
S0i
.
(11.10)
Аналогичные зависимости могут быть получены для
промежуточных сигналов и косвенных признаков ri , i 1, k .
Различные способы построения динамической непрерывной
модели в конечном итоге решают задачу выражения модели объекта
таким оператором, состав и вид которого определяется физическими
157
параметрами элементов объекта или коэффициентами
преобразования при переходе объекта в различные состояния.
их
§ 11.3. Дискретные диагностические модели
Объекты дискретного действия, отличающиеся друг от друга по
назначению и конструктивному исполнению, могут быть
представлены обобщенной аналитической моделью, отражающей
особенности оценки их работоспособности. Поскольку большинство
объектов дискретного действия имеют в своем составе элементы
непрерывного действия, целесообразно дискретные модели строить в
виде
некоторого
аналога
дифференциальным
уравнениям,
позволяющего получать решение в форме непрерывной функции.
Этим условиям удовлетворяют так называемые разностные, или
конечно - разностные уравнения.
Такие уравнения в общем случае связывают значения y k
функции y f ( x ) на дискретном множестве значений x k и
записываются в виде
y k f ( y k 1 , y k 2 ,..., y1 , x k ), k 0 ,1,2 ,...,
(11.11)
причем интервал x между дискретными значениями x k может быть
постоянным или изменяться.
В матричной форме модель может быть представлена по
аналогии с выражением (11.5) как
Y ( t 1 ) AY ( t ) X ( t ), Y ( 0 ) C , t 0,1,2,...,
(11.12)
либо относительно независимой переменной в виде
Yk 1 AY X ( k ), k 0 ,1,2 ,... .
158
(11.13)
Выражение (11.13) тождественно системе разностных уравнений
первого порядка
y1,k 1 a11 y1k a12 y 2 k ... x1(k);
y 2 ,k 1 a 21 y1k a 22 y 2 k ... x 2 (k);
. . . . . . . . . . . . . . . . . .
(11.14)
и используется для описания объекта при различных фиксированных
значениях коэффициентов aij , выраженных через параметры элементов, в тех случаях, когда допустимо получение решений в виде аппроксимаций непрерывных функций.
Если же такое представление объекта невозможно, что
характерно, например, для электронных цифровых устройств,
построение дискретной диагностической модели производится с
применением аппарата теории конечных автоматов.
При этом в качестве модели объекта рассматривают в общем
случае некоторый преобразователь, называемый конечным автоматом, который характеризуется набором входных сигналов
X ( x1 , x 2 ,..., x n ), выходных сигналов Y ( y1 , y 2 ,..., y m ) и
конечным множеством состояний Z ( z1 , z 2 ,..., z k ) . Каждая составляющая в этих совокупностях может принимать лишь два значения 0 или 1. Такое представление дискретного объекта позволяет
получать модель в виде таблиц состояний или переходов.
Если в исследуемом объекте значения выходных сигналов
однозначно определяются лишь значениями входных сигналов,
конечный автомат представляют в виде комбинационной схемы
(рис.11.1). Такие представления используют для так называемых
дискретных устройств без памяти. К их числу относится, например,
диодный дешифратор двоичных сигналов.
Объекты, у которых выходные сигналы зависят не только от
входных, но и от внутренних переменных, представляют в виде
последовательностной схемы конечного автомата (рис.11.2).
Внутренние переменные соответствуют ранее подававшимся
входным сигналам, т.е. фактически определяют память конечного
автомата. Таким образом представляют объекты с памятью,
характерным примером которых является двоичный счетчик.
159
Рис.11.1 Комбинационная
схема конечного автомата
Рис.11.2 Последовательностная
схема конечного автомата
Комбинационные схемы описываются системой логических
функций вида
y1 f 1 ( x1 , x 2 ,..., x n );
y 2 f 2 ( x1 , x 2 ,..., x n );
. . . . . . . . . . . .
y m f m ( x1 , x 2 ,..., x n )
(11.15)
или в операторной форме
Y F( X ),
(11.16)
где F ( f1 , f 2 ,..., f m ) логический оператор, представляющий
булеву функцию перехода набора входных сигналов X в набор Y.
Вместо
уравнений
(11.15),
(11.16)
для
описания
комбинационной схемы конечного автомата можно использовать
табличную форму, например, описание в виде так называемой
таблицы истинности, или таблицы состояний (табл.11.1).
160
Таблица 11.1
Пример таблицы состояний конечного автомата без памяти
x1
0
0
0
.
.
.
x2
0
0
1
.
.
.
x3
0
1
0
.
.
.
y1
0
0
1
.
.
.
y2
0
0
0
.
.
.
От таблицы состояний можно легко перейти к аналитической
форме описания с использованием логических функций в требуемом
виде. Например, для рассматриваемого примера можно использовать
уравнения
y1 x1 xx3 x1 x 2 x3 x1 x 2 x3 ;
y1 x1 x 2 x 2 x3 ;
y3 x 2 ( x1 x3 ) .
Последовательностные схемы описываются
функциями выходов Ф и переходов F в виде
Z 1 F ( Z , X );
Y ( Z , X ),
логическими
(11.17)
где символы и 1 определяют принадлежность совокупностей
переменных текущим тактам (шагам) времени. При этом -й такт
соответствует моменту времени t, а ( 1 ) -й такт моменту
времени t .
Задание автомата зависимостями (11.17) соответствует
перечислению всех возможных пар ―входной сигнал состояние‖ и
сопоставлению этим парам выходных сигналов и состояний. Эту цель
можно достичь, используя графические и графоаналитические
методы.
Рассмотрим
такие
формы
представления
последовательностного автомата на следующем примере.
Объект дискретного действия имеет один вход ( X ( x )), один
выход ( Y ( y )) . Число возможных состояний Z k пять ( k 1,5 ),
161
каждое состояние определяется совокупностью трех переменных
( Z k ( z1 , z 2 , z 3 )) . Сигналы на входе и выходе могут принимать одно
из двух значений соответственно x1 , x 2 и y1 , y 2 .
Представим модель объекта в форме графа переходов
(рис.11.3), в котором вершины представляют собой состояния Z k , а
ветви возможные переходы из одного состояния в другое. Каждой
ветви приписаны символы значений входных и выходных сигналов.
Рис.11.3. Граф переходов (переходов - выходов)
последовательностного автомата
По этому графу, используя соотношения (11.17), составим
таблицы переходов (табл.11.2) и истинности (состояний) (табл.11.3).
При этом подставим значения переменных х1=0, х2=1, y1=0, y2=1,
Z1=000, Z2=001, Z3=010, Z4=011, Z5=100.
Таблица 11.2
Таблица переходов конечного автомата
Z k 1 ( z1 , z 2 , z 3 )
Y
X
0
1
Z k ( z1 , z 2 , z 3 ), k = 1,5
000
000/0
011/1
001
000/0
100/1
162
010
100/0
000/1
011
010/1
011/1
100
001/1
100/1
Элементы строки таблицы X 0 показывают в какое
состояние Z k 1 из предыдущего Z k переходит автомат и при каком
значении Y .
Таблица 11.3
Таблица состояний конечного автомата
x z1 z2 z3
z1 z 2 z 3 y
x z1 z2 z3
z1 z 2 z 3 y
0
0
0
0
0
0
0
1
0
0
1
1
1
1
1
0
1
0
0
1
0
0
0
0
1
0
0
1
1
0
0
1
0
1
0
0
0
0
1
0
0
0
0
0
1
0
0
0
1
1
0
0
0
0
1
0
0
1
1
0
0
1
0
1
0
1
0
0
1
0
1
0
0
1
0
1
1
1
1
1
От табличной или графической формы диагностической модели
можно легко перейти к аналитической. Например, для
рассмотренного примера объект определяется логическими
функциями вида
y x z1 z 2 z3 xz1 z 2 z3 x ;
z1 x z1 z 2 z3 xz1 z 2 z3 xz1 z 2 z3 ;
z 2 x z1 z 2 z3 xz1 z 2 z3 xz1 z 2 z3 ;
z3 x z1 z 2 z3 xz1 z 2 z3 xz1 z 2 z3 .
Эти уравнения
развернутом виде.
соответствуют
зависимостям
(11.17)
в
§ 11.4. Выбор диагностических параметров
Одна из важнейших задач, решаемых при разработке
диагностического обеспечения — выбор необходимой и достаточной
совокупности диагностических параметров и установление их
предельно допустимых (граничных) значений. Основным условием
оптимальности получаемого решения является обеспечение перекрытия всего информационного поля, характеризующего состояние
163
объекта и его возможные изменения, при минимальной стоимости
изготовления и эксплуатации объекта.
Поскольку глубина и способы оценки состояния объекта во
многом определяются реализуемыми режимами диагностирования,
следует говорить о различных видах совокупностей диагностических
параметров для контроля правильности функционирования объекта, для контроля работоспособности, для поиска дефекта, для прогнозирования изменения состояния.
Совокупность диагностических параметров для контроля
правильности функционирования выбирается для объектов, в
управлении которыми принимает участие человек-оператор, или
информация о состоянии которых используется непосредственно
человеком. В эту совокупность обычно включают основные
технические параметры, характеризующие режимы работы объекта с
точки зрения его функционального назначения. В нее могут входить
такие параметры, как величина напряжения, частота переменного
тока, напор, частота вращения и т.п. Граничные значения таких
параметров устанавливают в соответствии с величинами допусков,
нормируемых техническим заданием, техническими условиями на
объект или нормативно-техническими документами.
Выбор совокупности диагностических параметров для контроля
работоспособности представляет собой более сложную и
многоальтернативную задачу. Еще на стадии разработки
технического задания на проектирование объекта должно быть четко
сформулировано и регламентировано понятие его работоспособного
состояния и установлены ограничительные условия его эксплуатации,
транспортирования, хранения.
На стадии технического предложения должны быть
установлены основные воздействующие факторы, подверженные
изменению свойства объекта и характеризующие их признаки, а
также зависимости, связывающие воздействующие сигналы и
сигналы реакции объекта в соответствии с выражением (11.1). По
степени влияния на свойства объекта выбирают совокупность
определяющих
воздействий
и
производят
построение
диагностической модели работоспособного объекта.
Анализ диагностической модели позволяет установить полную
совокупность параметров (прямых и косвенных), обеспечивающих
максимальную достоверность оценки состояния объекта,
Z N ( z1 , z 2 ,..., z N ) , где N общее число параметров
164
диагностической модели. В зависимости от вида модели это могут
быть коэффициенты алгебраических и дифференциальных уравнений,
корни характеристических уравнений, передачи ветвей графа,
статические и переходные характеристики и т.п.
Поскольку целью выбора диагностических параметров в этом
случае является не определение фактического состояния объекта, а
лишь
установление
факта
его
работоспособности
или
неработоспособности (определение в какой из областей S1 или S 2
находится вектор состояния), некоторые параметры из совокупности
Z N могут оказаться информационно избыточными. Измерение ряда
параметров может оказаться технически невозможным или
экономически нецелесообразным. Исходя из этих соображений,
производят
минимизацию
совокупности
до
объема
ZN
Z n ( z1 , z 2 ,..., z n ) , где n < N.
Достаточность выбранного числа n параметров для оценки
состояния объекта заданной или определенной достоверности можно
проверить по расчетному значению вероятности правильного
диагностирования
n
N
i 1
i 1
Pпд ( n ) k i c i u( z i ) k i c i u( z i ) ,
(11.18)
где k i коэффициенты, учитывающие безотказность элементов, на
которых реализуются оцениваемые признаки; ci коэффициенты
веса признаков; u( zi ) норма вектора чувствительности i-го
показателя по отношению к параметрам z Tj , тождественно
определяющим изменяющиеся свойства или параметры элементов
объекта
z z
z i
, (i 1, n ) ,
u(z i ) i , i ,...,
zTm
zT1 zT2
(11.19)
где m число изменяющихся свойств или параметров элементов
объекта, принятых к рассмотрению.
Значения u( zi ) предварительно принимают соответствующими
объекту-аналогу и уточняют по результатам определительных
испытаний на надежность.
165
Коэффициенты k i могут быть взяты по результатам испытаний
и эксплуатации объектов-аналогов или рассчитаны и уточнены в
процессе проектирования рассматриваемого объекта. Коэффициенты
ci обычно рассчитывают методами экспертных оценок. На первом
этапе проектирования можно принимать k i = 1, ci = 1.
Для простых объектов совокупность Z N стремятся по
возможности свести до одного определяющего или обобщенного
параметра. Для сложных объектов число контролируемых параметров
сводят до числа элементов структурной схемы самого высокого
уровня (по одному определяющему или обобщенному параметру для
каждого элемента).
Выбор диагностических параметров для прогнозирования
изменения состояния объекта производится аналогичным образом.
При этом следует проверять возможность использования лишь
одного параметра, выбранного для контроля работоспособности
наименее надежного элемента.
Для обеспечения решения задачи поиска дефекта совокупности
диагностических параметров определяют для каждого элемента
структурной схемы объекта наименьшего заданного уровня. Некоторые наиболее употребительные виды диагностических моделей
пои-ска дефекта и способы их анализа рассмотрены в гл.9.
Определение граничных значений диагностических параметров
предварительно
производится
по
результатам
анализа
диагностической модели работоспособности объекта, исходя из
заданных нормированных допусков выходных технических
параметров, и уточняется в процессе проведения испытаний опытных
или серийных образцов на надежность.
При этом для аналитических моделей систем автоматического
регулирования расчетные граничные значения диагностических
параметров могут быть установлены из условия допустимых
перемещений корней характеристического уравнения на комплексной
плоскости непосредственно по виду корневого годографа или с
использования метода малого параметра.
Поскольку процесс изменения состояния большинства объектов
является
случайным,
граничные
значения
диагностических
параметров обычно рассчитывают в виде статистических оценок по
результатам наблюдения за выборкой одинаковых объектов. При
этом, если закон распределения времени безотказной работы
нормальный и известны его основные параметры, точечные оценки
166
граничных значений параметров могут быть получены как
среднеарифметические величины результатов решений уравнений
zmax ( t i ) z ( t i )
zmin ( t i ) z ( t i )
T1
z ( ti )
T1
z ( ti )
t
t
1
t
1
t
z ( ti ) ;
(11.20)
z ( ti ) ,
(11.21)
где t i момент времени наблюдения; i 1, n ; n число циклов
испытаний (наблюдений). Эти уравнения получены путем
приравнивания соответственно выражений (3.1) и (4.17), (3.1) и
(4.19).
Интервальные оценки могут быть получены с использованием
выражений (6.25), (6.26). Наиболее широко применяемые процедуры
выбора и минимизации совокупностей диагностических параметров,
а также определения их граничных значений подробно
рассматриваются в специальной литературе [10].
§ 11.5. Оценка значимости диагностических параметров
Минимизация совокупности диагностических параметров и
выбор определяющих параметров производятся по результатам
количественных оценок их значимости, или эффективности. К числу
основных показателей эффективности относятся показатели
чувствительности и точности, с которыми рассматриваемые параметры отслеживают процессы изменения технического состояния
объекта.
Если текущее состояние объекта в основном зависит от
изменения его функциональных свойств таких, например, как
быстродействие, точность обработки сигналов, помехоустойчивость и
т.п., выбор диагностических параметров и предварительная оценка их
эффективности обычно производится путем анализа математической
модели в виде систем дифференциальных уравнений, передаточных
функций, переходных характеристик или характеристических
уравнений. Уточнение оценки эффективности производится по
результатам испытаний на надежность.
167
Для объектов или отдельных элементов, состояние которых
определяется в основном их физическими свойствами (механическая
прочность, упругость, электропроводность и т.п.), математическая
форма диагностической модели не обеспечивает приемлемого для
практики уровня достоверности получаемых результатов из-за
большого числа вынужденных допущений. В этих случаях чаще
используют физические модели, а необходимую информацию
получают по результатам их имитационных испытаний с
использованием разрушающих методов.
Для совокупности диагностических признаков модели поиска
дефекта достаточна оценка их эффективности лишь с точки зрения
чувствительности к изменению контролируемых сигналов или
технических параметров элементов объекта. Такая оценка каждого iго параметра производится путем вычисления его функций
чувствительности в виде
S ij Fi / g i ,
(11.22)
где gi , ( j 1, m ) промежуточные сигналы или технические
параметры элементов объекта; Fi Z i ( g1 , g 2 ,..., g m , t ) .
Чувствительность
каждого
диагностического
параметра
определяется нормой его чувствительности
u( z i )
m
Fi / g i .
(11.23)
j 1
Ранжирование диагностических параметров с использованием
выражений (11.22) и (11.23) осуществляется обычно при анализе
моделей, характеризующих внезапные отказы, вызываемые дефектами типа обрыв или замыкание участка цепи, механическое разрушение детали или узла и т.п.
Если же речь идет о поиске дефектов, вызывающих
постепенный отказ, или о контроле работоспособности объекта, на
характер изменения состояния которого существенное влияние
оказывают различные деградационные процессы такие, например, как
коррозия, старение, изнашивание и т.п., целесообразно использовать
функции чувствительности в виде
168
Qz ,x
z ( t )
,
x ( t )
(11.24)
где z ( t ) и x ( t ) производные по времени регрессионных
зависимостей z( t ) и x( t ) , характеризующих случайные процессы
изменения диагностического параметра z и контролируемого
свойства (технического элемента) объекта x. В случае контроля
одним параметром двух или более свойств (параметров элементов)
для него может быть определена норма чувствительности по
аналогии с выражением (11.23).
Наиболее целесообразно ранжирование диагностических
параметров при построении модели прогнозирования.
Для модели контроля работоспособности и прогнозирования
состояния объекта кроме оценки чувствительности диагностических
параметров необходима оценка степени их точности, т.е.
соответствия характера случайного процесса изменения значений
диагностического параметра Z(t) характеру случайного процесса
изменения контролируемого свойства или технического параметра
X(t).
Оценка точности рассматриваемого диагностического параметра
производится по степени тесноты связи между случайными
переменными Z и X. При этом переменная X интерпретируется как
независимая, а теснота парной связи принимается тождественной
тесноте связи между соответствующими вероятностными процессами
Z(t) и X(t).
Обобщенной характеристикой степени тесноты связи случайных
переменных в двухмерной (x,z) системе наблюдения является индекс
корреляции
I z , x 1 Dz , x / Dz ,
(11.25)
где Dz , x средняя величина дисперсии неконтролируемой остаточной случайной компоненты в регрессионной зависимости
z( x ) f ( x ) ( x ) ,
в которой неслучайная составляющая f(x) описывает поведение
условного среднего z ср ( x ) , а остаточная случайная компонента (x)
169
отражает случайную природу зависимости z(x); Dz характеризует
полную вариацию (дисперсию) исследуемого параметра z.
При характере зависимости z(x) близком к линейному теснота
связи может быть рассчитана аналитически или по результатам
испытаний в виде статистической оценки коэффициента корреляции
n m
( x ij x )( z ij z )
rz , x
i 0 j 1
( x ij x ) 2 ( z ij z ) 2
i 0 j 1
i 0 j 1
n m
n m
12
,
(11.26)
где n число моментов наблюдения (циклов испытаний); m число
измерений в каждый момент времени наблюдения (число
1 n m
1 n m
x x ij , z z ij общие
исследуемых объектов);
n i 0 j 1
n i 0 j 1
средние результатов измерений x и z при полном количестве их для
каждой переменной N = (n +1)m.
При существенно нелинейной зависимости z(x) рассчитанные
значения rz ,x могут быть очень малыми ( rz , x 0 ) , на основании чего
возможно неверное заключение о слабой коррелированности процессов Z(t) и X(t) или вообще об их некоррелированности.
Более универсальной характеристикой степени тесноты парной
связи случайных переменных является корреляционное отношение
z ,x , рассчитываемое как статистическая оценка индекса корреляции.
Но его использование возможно лишь в ситуациях, в которых
характер
расположения
и
количество
двухмерных
точек
( x1 , z1 ), ( x 2 , z 2 ),..., ( x N , z N ) допускает их группирование по оси x в
k одинаковых
интервалах. При этом в каждом i-м интервале будет
располагаться mi двухмерных точек. Это условие должно
учитываться при планировании испытаний.
z , x D̂z ( x ) / D̂z s z2( x ) / s z2 ,
170
(11.27)
где
D̂z ( x ) s z ( x ) статистическая оценка дисперсии функции
регрессии z ср f ( x ); D̂ z s z статистическая оценка дисперсии
индивидуальных наблюдений z около общего среднего z .
s z2( x )
1 k
m i ( z i z )2 ;
N i 1
(11.28)
s z2
1 k mi
( zij z )2 ,
N i 1 j 1
(11.29)
1 mi
zij среднее значение ординат точек, попавших в i-й
m i j 1
интервал группирования. Если зависимости z(x) линейная, z ,x rz ,x .
В случае необходимость для каждого диагностического
параметра может быть рассчитана норма точности.
где z i
Глава 12.
ЭФФЕКТИВНОСТЬ СИСТЕМ ДИАГНОСТИРОВАНИЯ
§ 12.1. Понятие и показатели эффективности диагностирования
Понятие эффективности объекта как обобщенного его свойства
рассмотрено в § 1.3. Оно непосредственно связано с использованием
объекта по назначению, т.е. с получением в процессе эксплуатации
некоторого эффекта. Эффект в такой интерпретации определяется
уровнем и ценой получаемых результатов в соответствии с
функциональным назначением объекта и может рассматриваться как
следствие реализации всех составляющих эффективность объекта
свойств (см. рис.1.1).
В зависимости от вида и назначения объекта в качестве
показателей эффективности могут использоваться различные
комплексные
характеристики,
такие,
например,
как
производительность, себестоимость выпускаемой продукции, объем
171
грузооборота, уровень жизнеобеспечения и др. При этом следует
иметь в виду, что исследуемый объект может наряду с другими
объектами входить в состав системы более высокого иерархического
уровня, что приводит к необходимости оценки его эффективности с
точки зрения степени влияния на показатель эффективности системы
в целом. Эффективность объекта изменяется с течением времени его
эксплуатации.
Прямым
способом
оценки
эффективности
системы
диагностирования является определение обеспечиваемой ею
величины повы-шения эффективности объекта путем формального
сравнения показа-телей эффективности объекта без системы
диагностирования 0 ( t ) и с системой диагностирования д ( t ) .
Показатель эффективности системы диагностирования в этом случае
может рассчитываться в абсолютном или относительном выражении
K Э ( t ) д ( t ) 0( t ) ;
(12.1)
K Э ( t ) K Э ( t ) / 0 ( t), t bTд ,
(12.2)
где Tд период диагностирования; b число циклов
диагностирования, проведенных к моменту времени оценки
эффективности объекта.
Исходя из рассмотренных основных положений и принципов
технического диагностирования, можно утверждать, что в структуре
понятия эффективности объекта при условии использования системы
диагностирования изменятся практически все составляющие его
характеристики и соответственно их показатели k i . Следовательно,
0 ( t ) F ( a i k i ( t )), i 1, n ;
(12.3)
д ( t ) F ( a i k iд ( t )), i 1, n ,
(12.4)
где n число принятых к рассмотрению составляющих
характеристик эффективности; kiд ( t ) показатели характеристик
эффективности объекта в системе диагностирования; ai —
коэффициенты веса.
Для большого числа объектов эффективность системы
диагностирования может быть оценена по наиболее характерным
172
элементам полезного эффекта, таким, например, как повышение
безотказности, сокращение времени восстановления, увеличение
коэффициентов
готовности
и
технического
использования,
улучшение показателей долговечности или сохраняемости и др.
Эффективность систем диагностирования сложных объектов
ответственного назначения целесообразно оценивать по степени
обеспечиваемого ими изменения цены риска, которая определяется
вероятностью отказа объекта Q(t), затратами на создание и
эксплуатацию объекта Э1 ( t ) и затратами на устранение последствий
отказа Э2 ( t ) . Показатели эффективности в абсолютном или
относительном выражении
K Э ( t ) Э1 ( t ) Q( t )Э2 ( t ) Э1д ( t ) Q д ( t )Э2д ( t ) ;
K Э ( t ) K Э ( t ) /( Э1 ( t ) Q( t )Э2 ( t )) ,
(12.5)
(12.6)
где индекс д означает наличие системы диагностирования.
Ориентировочная
оценка
эффективности
системы
диагностирования на начальных этапах ее проектирования может
быть сделана по степени увеличения вероятности правильного
функционирования объекта
Pф ( t ) P1 ( t )Pд ( t ), t bTд ,
(12.7)
где P1 ( t ) — вероятность безотказной работы неконтролируемой
части объекта; Pд ( t ) — вероятность правильной оценки состояния
контролируемой части объекта.
§ 12.2. Определение вероятности правильной оценки состояния
объекта
Процедура
формирования
показателя
эффективности
диагностирования PФ ( t ) по выражению (12.7) может быть наглядно
представлена иерархическим деревом показателей диагностирования
(рис.12.1).
173
Показатель нулевого уровня PФ ( t ) представляет собой
критерий эффективности диагностирования. Показатель первого
уровня Pд ( t ) характеризует вероятность получения правильной
оценки при диагностировании объекта в момент времени t. На втором
уровне расположены показатели, характеризующие надежность
технических средств диагностирования (вероятность их правильного
функциониорования PФТ ( t ) ) и достоверность диагноза D, на третьем
частные
показатели
надежности
технических
средств
диагностирования (коэффициент готовности K ГТ , вероятность
безотказной работы PT ( t ) ) и составляющие достоверности диагноза
(соответствие диагностической модели объекту DС , полнота
диагностирования D П , инструментальная достоверность D И ), на
четвертом показатели надежности элементов ( k дТ j , pТ j ( t )) ,
совокупности
диагнос-тических
параметров
(количество
диагностических параметров объекта N, диагностической модели
n, измеряемые m), вероят-ности ошибочных измерений
диагностических параметров d Иi .
PФ(t)
0
Pд(t)
1
P1(t)
PФТ(t)
D
КГТ
PТ(t)
DC
DП
DИ
kГТj
pTj(t)
N,n
n,m
dИi
2
Рис.12.1. Дерево показателей диагностирования:
0-4 — уровни иерархии
174
3
4
Расчет проводят последовательно по уровням, начиная с
нижнего.
Вероятность
ложного
значения
при
измерении
i-го
диагностического параметра
d Иi i i ,
где i вероятность того, что измеряемый параметр находится в
допустимых пределах при получении результата о выходе его за
допустимые пределы (ошибка первого рода); i вероятность того,
что измеряемый параметр вышел за допустимые пределы при
получении результата о его нахождении в допустимых пределах
(ошибка второго рода).
При расчете вероятностей i , i обычно рассматривают
соотношения между максимальными отклонениями значения каждого
параметра от его математического ожидания hi , максимальными
погрешностями измерения i и пределами допустимых изменений
диагностических параметров i (табл.12.1).
Таблица 12.1
Расчетные значения i и i
Соотношения
h; h
Расчетные значения
i
i
0
0
h; h ( ( h ))2 / 4h
0
h; h
/ 4h
(( 2 ( h ))( h )) / 4h
h; h
/ 4h
/ 4h
Для определения величины hi и i можно использовать
выражения
hi zi 3; i i 3 ,
где z i , i среднеквадратические отклонения от математического
ожидания значения параметра и погрешности измерения.
175
Показатель соответствия диагностической модели объекту
DC n / N .
Показатель полноты диагностирования
DП m / n .
Показатель инструментальной достоверности
m
D И 1 d Иi .
i 1
K ГT
Показатели надежности технических средств диагностирования
и PT ( t ) рассчитывают по значениям показателей надежности
составляющих их элементов k ГTj и pTj ( t ), (j=1,k ) , где k число
элементов, зависящее от вида структурной логической схемы и
наличия избыточности.
Вероятность правильного функционирования технических
средств
диагностирования
при
функциональном
(рабочем)
диагностировании
PФТ ( t ) K ГТ ,
при тестовом диагностировании
PФТ ( t ) K ГТ PT ( t ).
Показатель достоверности диагностирования
D DС DП DИ .
Показатель правильности диагностирования
Pд ( t ) PФТ ( t )D .
176
§ 12.3. Принципы учета влияния показателей системы
диагностирования на показатели надежности объекта
Характер и степень влияния системы диагностирования на
показатели надежности объекта необходимо рассматривать с учетом
структуры технических средств диагностирования , методов диагностирования, вида объекта и режимов его использования. При этом
должны быть установлены взаимосвязи между всеми принятыми к
рассмотрению
показателями,
т.е.
описана
организация
взаимодействия всех элементов системы, включающей в себя объект,
технические средства диагностирования и человека-оператора, во
всех возможных ее состояниях.
Широкие возможности решения этой задачи дает построение и
анализ модели системы диагностирования в форме графа
состояний, представляющего собой описание марковского или
полумарковского процесса перехода системы из одного состояния в
другое.
Для построения модели необходимо предварительно определить
на основе анализа режимов использования объекта совокупность
возможных состояний системы диагностирования S S i , i=1,n и
пути переходов. Модель строится в виде ориентированного графа
G ( P , Q ) , множество вершин которого P pi , i=1,n соответствует
числу n возможных состояний, а множество ветвей Q q ij , j=1,n
определяет множество возможных переходов.
Каждой i-й вершине (состояние S i ) графа соответствует
вероятность нахождения системы в i-м состоянии Pi ( t ) , а операторы
ветвей представляют собой интенсивности переходов из i-го в j-е
состояние q ij const , если процесс переходов рассматривается как
однородный марковский, или вероятности переходов pij ( ij ) , если
процесс рассматривается как полумарковский.
В общем случае граф может быть описан системой
дифференциальных уравнений вида
n
P j( t ) Pi ( t ) q ij
i 1
или
177
(12.8)
n
P j ( t ) Pi ( t ) pij ( t ) ,
(12.9)
i 1
процедура составления и решения которых рассмотрена в § 5.6.
С помощью этих уравнений возможно установить соотношения
между показателями надежности объекта и показателями
диагностирования и определить степень влияния системы
диагностирования.
Поскольку обычно при этом оценивают характер изменения
комплексных показателей надежности таких, как коэффициент
готовности K Г , коэффициент технического использования KTИ и др.,
марковский процесс рассматривают как стационарный. При этом
Pi ( t ) Pi const и граф описывается системой алгебраических
уравнений, составляемых по правилу, приведенному в § 2.6.
Рассмотрим процедуру формирования диагностической модели
на примере.
Объект непрерывного действия диагностируется периодически в
специальном режиме. Технические средства абсолютно надежные.
Среднее
время
восстановления
объекта
Tв ср,
средняя
продолжительность
безотказной
работы
T1 , периодичность
диагностирования Tд , средняя продолжительность перевода объекта
из режима диагностирования в рабочий TП . В процессе
диагностирования дефекты, приводящие к отказу объекта, не
возникают.
Возможные состояния системы:
S1 объект в рабочем режиме, работоспособен;
S 2 объект диагностируется, работоспособен;
S 3 объект в рабочем режиме, неработоспособен;
S 4 неработоспособный объект диагностируется и
восстанавливается .
Представив процесс переходов из состояния в состояние как
однородный марковский, строим граф возможных переходов,
обозначаем вершины и операторы ветвей (рис.12.2).
178
Рис.12.2. Граф переходов
По графу составляем систему дифференциальных уравнений:
P1( t ) q21 P2 ( t ) q41 P4 ( t ) ( q12 q13 )P1 ( t ) ;
P2 ( t ) q12 P1 ( t ) q21 P2 ( t );
P3( t ) q13 P1 ( t ) q34 P3 ( t ) ;
P4 ( t ) q34 P3 ( t ) q41 P4 ( t ) ,
где q12 q34 1 / Tд
интенсивность диагностирования;
q21 1 / TП интенсивность перевода объекта из режима
диагностирования в рабочий; q13 1 / T 0 интенсивность отказов
объекта; q41 1 / Tв ср интенсивность восстановления объекта.
Решение системы дает возможность установить все интересующие
проектировщика соотношения в общем виде.
Стационарный марковский процесс переходов для этого графа
описывается системой алгебраических уравнений:
q21 P2 q41 P4 ( q12 q13 )P1 0 ;
q12 P1 q21 P2 0 ;
q13 P1 q34 P3 0 ;
q34 P3 q41 P4 0 ;
P1 P2 P3 P4 1,
179
решение которой относительно Pi дает возможность рассчитать
комплексные
показатели
надежности
объекта
в
системе
д
диагностирования: K Гд P1 P2 ; K ТИ
P1 ,
( )
где P1
; P2
( ) ( )
( ) ( ) .
Полученные соотношения не только позволяют оценить
эффективность системы диагностирования по выражениям (12.3),
(12.4), но и дают возможность решать задачу оптимизации для
различных вариантов задания показателей надежности объекта и
показателей диагностирования.
В.П.Калявиным
и
А.В.Мозгалевским
[8]
предложен
универсальный способ определения комплексных показателей
надежности системы диагностирования в виде показателя готовности
n
П Г . В системе алгебраических уравнений без уравнения Pi 1
i 1
выбирают одну из вероятностей Pi в качестве базовой Pб и к ней
приводят остальные, введением коэффициентов Ai Pi / Pб .
Показатель готовности при описании процесса переходов как
однородного марковского
m
n
i 1
i 1
П Г Ai / Ai ,
(12.10)
где m число состояний, интересующих проектировщика с точки
зрения готовности объекта выполнять заданные функции.
Для рассмотренного примера при P1=Pб получаем A1 = 1; A2 = P2
/ Pб = q12 / q21 ; A3 = P3 / Pб = q13 / q34 ; A4 = P4 / Pб = q13 / q41 . Показатель
готовности объекта по отношению к состоянию S1 по формуле (12.10)
ПГ КГ
1
νγμ
.
1 A 2 A 3 A 4 γμ(γ ν) λν(μ γ)
Если процесс переходов полумарковский,
m
n
П Г Ai T0i / Ai Ti ,
i 1
i 1
180
(12.11)
где Ti pijTij средняя длительность пребывания системы в i-м
состоянии;
Tij M ( ij )
средняя
длительность
пребывания
системы в i-м состоянии перед переходом ее в j-е состояние; T0 i
средняя продолжительность сохранения объектом работоспособности
в i-м состоянии в течение времени Ti.
Для рассмотренного примера T1 = p12T12 + p13T13 = P0(Tд)Tд +
+ (1 – P0(Tд))T0, где P0(Tд) вероятность безотказной работы объекта на интервале времени t 0 ,Tд ; T2 = p21T21 = T21 = ТП = 1/ ; T3 =
= p34T34 = Tд = 1/ ; T4 = p41T41 = Tв ср
= 1/; T0 i T01 P0 ( t )dt = T0 ; A1 =
0
1; A2 = P0 ( Tд ); A3 = 1 – P0 ( Tд ); A4 = 1 – P0 ( Tд ).
При экспоненциальном законе распределения отказов P0 ( Tд ) =
exp ( – Tд ).
Подставив полученные значения в выражение (12.11), получим
величину ПГ = КГ .
Глава 13.
ЭКСПЛУАТАЦИОННАЯ НАДЕЖНОСТЬ ЭЛЕКТРОТЕХНИЧЕСКИХ
СИСТЕМ
§ 13.1. Общие положения по обслуживанию и ремонту
электротехнических систем
К электротехническим системам относится большое число
различных по назначению изделий и комплексов, имеющих в своем
составе электрические или электромеханические элементы, узлы и
устройства. Это системы автоматического регулирования и управления,
системы
связи,
контроля
и
сигнализации,
электроэнергетические системы и установки, электрические приводы
с исполнительными механизмами, электропреобразовательные
установки и т.п.
В производственной практике такие системы обычно
объединяют
общим
понятием
―электрооборудование‖
по
181
принадлежности к системе более высокого уровня. Например,
цеховое электрооборудование, электрооборудование электрических
станций,
самолетное
электрооборудование,
судовое
электрооборудование, электрооборудование автомобилей и т.п.
Объединяющими принципами для каждого из этих видов являются
место установки и условия эксплуатации.
Поскольку рассмотренные ранее положения по обеспечению
требуемого уровня надежности объектов имеют своей целью
повышение эффективности их использования, одной из основных
задач в процессе эксплуатации является практическая проверка
показателей эффективности и поддержание их в установленных
пределах. Особое внимание при этом уделяется обеспечению
максимально возможного уровня надежности.
Эта задача решается при помощи различного рода техникоорганизационных мероприятий, основными из которых являются
оперативное (вахтенное, или дежурное) обслуживание, техническое
обслуживание (ТО) и ремонт.
Оперативное обслуживание электрооборудования включает в
себя следующие виды работ и операций: подготовка к включению,
включение на рабочий режим, управление, контроль правильности
функционирования, выключение, перевод в исходное состояние
оперативной готовности. Осуществляется оперативное обслуживание
дежурным, или вахтенным персоналом.
ТО представляет собой комплекс мероприятий по поддержанию
электрооборудования в работоспособном состоянии на заданном
интервале времени эксплуатации. Осуществляется специальными
ремонтными бригадами из состава производственного персонала
предприятия (судна) или специализированной организации (базы)
технического обслуживания.
ТО электрооборудования включает в себя следующие основные
виды работ: профилактический осмотр, контроль работоспособности,
прогнозирование изменения состояния, поиск дефектов, чистка,
смазка, покраска, замена или ремонт дефектных и ослабленных
блоков, узлов и деталей, регулировка. При этом может производится
частичная или полная разборка электрооборудования.
Оперативное и техническое обслуживание осуществляются в
соответствии с требованиями эксплуатационной документации, а
также отраслевых нормативных документов, таких, например, как
―Правила технической эксплуатации электроустановок потре182
бителей‖, ―Правила устройства электроустановок‖, ―Правила технической эксплуатации судового электрооборудования‖ и т.п.
По результатам оперативного и технического обслуживания в
установленном порядке производятся записи в вахтенном журнале, в
журнале регистрации отказов и дефектов, а также в формулярах
технического состояния электрооборудования.
Ремонт
электрооборудования
проводится
с
целью
восстановления его состояния до требуемого уровня. В зависимости
от объема и характера выполняемых операций различают три
категории ремонта: текущий, средний и капитальный.
Текущий ремонт производится без вывода электрооборудования
из эксплуатации в случае его отказа или перехода в предельное
состояние, а также при необходимости в процессе технического
обслуживания. Он обеспечивает восстановление работоспособного
состояния объекта до уровня, достаточного для нормальной
эксплуатации в период до очередного технического обслуживания
или ремонта более высокой категории. При этом производят замену
или восстановление отдельных участков цепей, блоков или деталей (в
основном быстроизнашивающихся и легкосъемных), а также
выполняют необходимые регулировочные работы.
Назначением среднего и капитального ремонта является
восстановление исправного состояния электрооборудования и
обеспечение возможности его нормальной эксплуатации на период,
установленный техническими условиями или технологическими
инструкциями на ремонт. Эти категории ремонта предусматривают
демонтаж, полную разборку электрооборудования, восстановление
или замену всех дефектных узлов и деталей, регулировку, стендовые
испытания и испытания при использовании по прямому назначению.
Характерным отличием капитального ремонта от среднего является
наличие технологических операций по восстановлению корпуса и
полной или частичной перемотке электрических аппаратов и машин.
Ремонт этих категорий производится обычно на базе
специализированных ремонтных участков, цехов и предприятий.
Периодичность ТО и ремонта определяется особенностями
эксплуатации
электрооборудования,
характером
изменения
показателей его надежности и степенью контролепригодности. В
зависимости от этих признаков в настоящее время используются
следующие системы поддержания и восстановления требуемого
технического состояния электрооборудования:
183
1) по наработке (ресурсу). Эта система характерна для объектов
ответственного назначения с длительными циклами функционирования,
для которых известны корреляционные зависимости показателей
надежности от времени или объема наработки;
2) по времени эксплуатации (календарное обслуживание). Эта
система применяется в основном для объектов периодического и
кратковременного функционирования, для которых известны
зависимости показателей надежности от продолжительности
эксплуатации в данных условиях;
3) по регламентированным показателям (регламентное
обслуживание). Используется при контроле состояния объектов по
определяющим диагностическим признакам;
4) по состоянию. Используется при контроле фактического
состояния объектов по установленной совокупности прямых и
косвенных диагностических параметров.
§ 13.2. Показатели эффективности технического обслуживания
При эксплуатации электрооборудования производится сбор
первичной информации о его надежности и обработка получаемых
статистических данных по изменению состояния, по отказам и
наработке. Такая работа позволяет выявлять проектные и
конструктивные недостатки, оценивать эффективность использования
объектов,
устанавливать
оптимальную
периодичность
диагностирования и проведения профилактических мероприятий,
определять рациональный состав запасных изделий, т.е. в конечном
итоге она направлена на обеспечение высокого уровня
эксплуатационной надежности электрооборудования.
Для количественной оценки эффективности ТО используются
следующие показатели: показатель эффективности, коэффициент
эффективности, объем, средняя продолжительность, коэффициент
технического использования.
Показатель
эффективности
ТО
представляет собой
отношение наработки на отказ объекта, по которому производились
профилактические работы ( T0T ) , к наработке на отказ аналогичного
объекта, не подвергавшегося профилактике ( T0 ) :
184
П T T0T / T0 .
(13.1)
Прирост наработки на отказ обусловливается превентивным
предотвращением отказов путем замены или ремонта дефектных и
ослабленных (с низкой степенью работоспособности) блоков, узлов,
деталей.
Коэффициент эффективности ТО определяется выражением
nT
,
nT n
KT
(13.2)
где nT число частичных отказов, выявленных и предотвращенных
при техническом обслуживании; n число отказов, возникших при
эксплуатации в период до очередного технического обслуживания.
С учетом выражения (13.2) можно записать
ПT
TT / n
,
TТ /( nT n )
(13.3)
где TT периодичность технического обслуживания.
Под объемом ТО понимается число проводимых контрольных,
восстановительных и регулировочных операций.
Средняя продолжительность ТО
k
T Ti ,
(13.4)
i 1
где Ti средняя продолжительность i-й операции ТО.
При заданном объеме ТО снижение его продолжительности
обеспечивается за счет использования рациональных методов и
средств технического диагностирования.
Коэффициент технического использования объекта в
соответствии с выражениями (3.33) и (3.36)
K TИ
T0
.
T0 Tв ср T
185
(13.5)
Коэффициент технического использования обычно применяют
для оценки вероятности готовности к использованию объектов с
длительными циклами работы. Для объектов с периодическими или
кратковременными циклами работы целесообразно использовать
коэффициент готовности, так как их техническое обслуживание
проводится в периоды, когда объект находится в режиме ожидания.
§ 13.3. Планирование технического обслуживания и расчет ЗИП
Термином ЗИП в технике принято называть комплект запас-ных
изделий,
принадлежностей
(приспособлений,
контрольноизмерительных приборов и др.), инструментов и материалов,
необходимых для проведения технического обслуживания и текущих
ремонтов объекта в период до очередного среднего или капитального
ремонта.
Модель работы объекта с ЗИП соответствует модели работы
объекта со структурным резервированием замещением. Вероятность
безотказной работы в этом случае в соответствии с выражением (5.7)
определится как
p( t ) e
t
( t ) i
,
i 0 i!
m
(13.6)
где m число комплектов резервных элементов.
Если не все элементы объекта равнонадежны, вероятность
безотказной работы рассчитывается для каждой j-й группы,
состоящей из равнонадежных элементов
mj
( n j j t )i
i 1
i!
p j ( t ) exp( n j j t )
,
(13.7)
где m j число комплектов резервных элементов для j-й группы;
j интенсивность отказов элементов j-й группы; n j число
элементов j-й группы.
Число запасных элементов, необходимых для обеспечения
заданной вероятности безотказной работы объекта на планируемый
интервал времени t при известных значениях j , , n j , b , где b
186
число групп равнонадежных элементов, может быть рассчитано с
использованием выражений (13.6) и (13.7). Общее число запасных
элементов
b
M njm j .
(13.8)
j 1
Периодичность ТО может быть рассчитана по результатам
прогнозирования на основе выражений (4.17), (4.19), (4.21), (10.23),
(10.24) при t n m Tt Tд и заданном допустимом значении
вероятности безотказной работы объекта на момент времени
прогноза P(t).
§ 13.4. Организация технического обслуживания судового
электрооборудования
В последние годы значительно увеличилась степень
насыщенности морских судов различного рода электротехническими
устройствами и комплексами при высоком уровне их автоматизации.
При этом резко возросла
цена отказов электрооборудования,
определяемая стоимостью восстановительных работ и ликвидации
последствий отказа, а также объемом упущенной выгоды. Этим
обусловлены
повышенные
требования
по
обеспечению
эксплуатационной надежности судового электрооборудования. Их
реализация осуществляется с помощью организационно-технических
мероприятий, направленных на совершенствование системы ТО.
Главным принципом системы ТО является его непрерывность,
исключающая накопление восстановительных работ, которое
приводит к отказам электрооборудования и зачастую к неплановым
простоям судна или даже к выводу его из эксплуатации.
Непрерывность
ТО
обеспечивается
распределением
профилактических и ремонтных работ между судовым экипажем и
специальными ремонтными службами, к которым относятся
береговые ремонтные бригады, периодически направляемые в рейс,
187
береговые участки (лаборатории) автоматики, базы технического
обслуживания, судоремонтные и электроремонтные предприятия.
Основные задачи судового экипажа при ТО:
выполнение указанных в инструкции по эксплуатации объемов
контрольных, профилактических и восстановительных работ с
соблюдением установленной периодичности по времени, по
наработке
или
исходя
из
фактического
состояния
электрооборудования;
выявление отказов объекта в процессе эксплуатации,
определение вызвавших их причин и дефектов;
восстановление (по возможности) работоспособного состояния
объекта, устранение причины возникновения дефектов;
составление до прихода в порт перечня ремонтных работ,
которые должны выполнятся береговыми ремонтными службами;
оформление в вахтенном журнале и в формуляре
электрооборудования записей о фактах отказов, объемах
выполненных контрольных, профилактических и ремонтных работ.
Как показывает опыт эксплуатации, привлечение судового
экипажа для ремонта электрооборудования в период плавания судна
обеспечивает поддержание его эксплутационной надежности на
требуемом уровне, увеличивает межремонтный период, а также
приводит к снижению затрат заводского ремонта. Для этих целей
суда оборудуются электроремонтными мастерскими.
Основные
задачи,
решаемые
базами
технического
обслуживания:
составление графиков плановых осмотров и профилактических
ремонтов электрооборудования;
обеспечение ремонтов всех категорий за исключением тех,
выполнение которых возможно лишь в заводских условиях;
составление заявок на получение и пополнение состава ЗИП;
организация
сбора
информации
по
надежности
электрооборудования.
Распределение между исполнителями и контроль качества
ремонтных
работ,
выполняемых
в
период
эксплуатации,
осуществляет служба судового хозяйства при пароходствах.
Эффективность ТО в большой степени зависит от степени
надежности электрооборудования, обеспечиваемой при его создании,
от квалификации обслуживающего и ремонтного персонала, а также
от уровня точности и надежности методов и средств технического
диагностирования.
188
Глава 14.
ДИАГНОСТИРОВАНИЕ ЭЛЕКТРИЧЕСКОЙ ИЗОЛЯЦИИ
§ 14.1. Особенности диагностирования электрической изоляции
Эксплуатационная надежность всех видов электротехнических
устройств и комплексов в значительной степени определяется
состоянием их электрической изоляции. Такая зависимость особенно
характерна для силового электрооборудования и кабельных линий.
Статистические исследования, проведенные в различных отраслях,
убедительно подтверждают этот факт. Так, например, доля выхода из
строя асинхронных двигателей из-за отказа электрической изоляции
составляет от 50 до 85%, число случаев отказов по этой причине
участков кабельных электрических сетей доходит до 95%.
На этом основании при оценке надежности большинства
электротехнических систем их электроизоляционные конструкции
рассматривают
как
наименее
надежные
элементы,
что
предопределяет повышенные требования к достоверности оценки их
состояния и прогнозированию его возможного изменения.
Отказ электрической изоляции проявляется в виде ее пробоя.
Различают три вида пробоя твердых диэлектриков: электрический,
тепловой и электрохимический.
Электрический пробой по своей природе является чисто
электронным процессом. Он заключается в том, что электроны,
накопив в электрическом поле энергию, достаточную для
преодоления энергетического барьера, производят отщепление новых
электронов, что приводит к нарушению стационарного состояния
молекулярной структуры диэлектрика и возникновению ударной
ионизации.
Причиной
возникновения
теплового
пробоя
является
возрастание кинетической энергии молекул и атомов материала
диэлектрика за счет местного разогрева в переменном электрическом
поле.
Электрохимический пробой имеет место как при переменном,
так и при постоянном напряжении, когда в диэлектрике в условиях
повышенной
температуры
и
влажности
развиваются
электролитические
процессы,
приводящие
к
необратимым
изменениям структуры изоляции.
189
Следует отметить, что такая классификация пробоев
диэлектриков носит условный характер, так как в действительности
при эксплуатации имеет место наличие всех перечисленных
факторов, и можно говорить лишь о преобладающем действии одного
из механизмов пробоя.
Применительно к большому числу видов электрооборудования,
в частности, к судовому, целесообразно рассматривать пробой
изоляции как электрохимический. Однако это не исключает в
отдельных случаях проведения анализа с позиций электрического и
теплового пробоя. Например, при исследовании изоляции
электрических устройств, работающих в условиях резкого нарушения
теплового
баланса,
высокочастотного
и
высоковольтного
оборудования.
Независимо от преобладания того или иного механизма пробоя
он происходит в наиболее ―слабом‖ месте, т.е. представляет собой
локальное явление. Причиной возникновения таких ―слабых‖ участков
являются развивающиеся в изоляции дефекты. При этом
первоначальные, зачастую необнаруживаемые дефекты появляются
еще на стадии еѐ изготовления. Путем совершенствования методов
проектирования и технологии создания электроизоляционных
конструкций можно существенно уменьшить их количество и тем
самым повысить расчетную надежность изоляции, но избавиться от
них полностью в принципе невозможно, так как их наличие заложено
в самой неоднородности структуры материала.
В процессе эксплуатации электрооборудования под действием
различного рода дестабилизирующих факторов происходят структурные изменения материала изоляции, приводящие к развитию первоначальных дефектов и возникновению новых.
Примерная классификация видов воздействий на изоляцию, с
учетом
которых
осуществляется
проектирование
электрооборудования и кабелей, приведена в табл.14.1.
Исследование характера и степени влияния на состояние
изоляции каждого из перечисленных воздействий представляет собой
весьма сложную задачу и целесообразно лишь при разработке новых
изоляционных материалов применительно к конкретным видам
электрооборудования и условиям использования.
В эксплуатационных условиях все факторы действуют
совместно и результаты их воздействия на изоляцию взаимосвязаны.
Например, разрушение материала под действием термических и
окислительных процессов приводит к уменьшению его прочности,
190
появлению трещин и пустот, что усугубляется механическими
воздействиями.
Распространение электрических
разрядов
в
воздушных полостях и проникновение в них влаги может обусловить
электрическое, а затем и электрохимическое разрушение изоляции.
По мере накопления и развития дефектов возрастает вероятность ее
пробоя
коммутационным
перенапряжением
или
рабочим
напряжением в наиболее ослабленном месте.
Таблица 14.1
Основные факторы и виды воздействий на электрическую изоляцию
Факторы воздействий
Тепловой
Электрический
Атмосферный
Механический
Нагрузка
Виды воздействий
Повышенная температура нагрева, повышенная температура окружающей среды,
пониженная температура окружающей
среды, градиент температуры,
направленное тепловое воздействие.
Рабочее напряжение, повышенное напряжение, частота, частичные электрические
разряды, поверхностные электрические
разряды.
Воздух, кислород, водород, азот, инертные газы, сера, вакуум, смазочные материалы, влажность, пыль, бактерии.
Виброэлектродинамические,
ударноэлектродинамические,
вибромеханические, ударномеханические,
изгибы, давление, растяжение, кручение.
Длительная, кратковременная, повторнократковременная, периодический пуск и
электрическое торможение, хранение и
транспортирование.
При этом с точки зрения оценки состояния изоляции не имеет
существенного значения степень воздействия на нее каждого фактора
в отдельности. Весь этот процесс следует рассматривать в комплексе
как общее старение изоляции во времени. И хотя непосредственной
причиной отказа является недопустимое изменение свойств изоляции
в случайном ограниченном объеме, развитие дефектов происходит в
силу изменения всей структуры изоляции, что должно определять
191
наличие корреляционной связи между свойствами изоляции и
показателями ее надежности. Основными задачами исследования
эксплуатационной надежности изоляции является установление такой
связи, выбор минимальной совокупности признаков, позволяющих
оценивать ее качественные изменения в процессе эксплуатации, а
также определение количественных критериев контроля и
прогнозирования работоспособности.
Понятно, что по отношению к электрооборудованию,
используемому в нестационарных условиях, в частности, к судовому
электрооборудованию, эти задачи могут решаться лишь на базе
аппарата математической статистики.
§ 14.2. Методы оценки состояния электрической изоляции
Известно большое число методов контроля и оценки состояния
изоляции, применяемых на разных этапах изготовления и
эксплуатации электрооборудования. По принципу испытательного
воздействия их можно разделить на три группы: физические
структурные, разрушающие и неразрушающие косвенные.
Физические
структурные
методы
обеспечивают
непосредственную оценку физико-химического состава и состояния
структуры материала изоляции. К ним относятся следующие виды:
диэлектрическая релаксационная спектроскопия, инфракрасная
спектроскопия, рентгеновский структурный анализ, магнитный
ядерный
резонанс,
парамагнитный
электронный
резонанс.
Применимы они лишь при исследовании образцов изоляционных
материалов в отрыве от электрооборудования и в лабораторных
условиях, что ограничивает область их практического использования.
На практике они иногда применяются для диагностирования
изоляции крупных и уникальных электрических машин и
трансформаторов.
Разрушающие методы основаны на приложении к изоляции в
течение определенного времени испытательного напряжения,
превышающего
по
величине
номинальное.
Испытательное
напряжение может быть постоянным, синусоидальным частотой 50 и
0,1 Гц, импульсным. Такие испытания проводятся в качестве
контрольных. Их положительные результаты (отсутствие пробоя
192
изоляции) свидетельствуют о том, что изоляция в момент проведения
испытаний находилась в работоспособном состоянии, но не дают
никакой информации для прогнозирования срока ее дальнейшей
службы. Более того, в ряде случаев сами испытания могут вызвать
дефекты изоляции или способствовать их развитию. Следствием
отрицательных результатов являются дорогостоящие ремонтные
операции или списание электрооборудования.
Диагностирование
изоляции
в
процессе
технического
обслуживания электрооборудования производится в основном
неразрушающими косвенными методами. Подробное описание их
видов дается в специальной литературе, в частности, в
фундаментальном труде Д.Вайды [1]. Перечень наиболее широко
распространенных неразрушающих методов и используемых при
этом диагностических параметров приведен в табл.14.2. Рассмотрим
их краткие характеристики.
Таблица 14.2
Неразрушающие косвенные методы диагностирования
электрической изоляции
Методы
Диагностические параметры
Исследование
проводимости
Установившееся омическое сопротивление R ;
динамическое сопротивление R (t); ток утечки
IУТ
Поляризационные
методы
Электрическая
емкость
С;
показатели
характера и формы изменения тока абсорбции
Исследование
диэлектрических
потерь
Тангенс угла диэлектрических потерь tg
Частотные
методы
С ( ); R( ); tg ( ); кс C(ω1 )/C(ω2 );
к tg ( 1 ) / tg ( 2 ), 1 2
Исследование
Частота повторения разрядов; интенсивность
частичных разрядов разрядов; форма разрядов
Импульсные
методы
Уровень магнитного поля; форма выходного
сигнала
193
Исследование проводимости предполагает оценку степени и
характера электрической проводимости изоляции под действием
приложенного постоянного напряжения U 0 .
Наиболее часто в качестве диагностирующего параметра
используется омическое сопротивление изоляции R. Различными
нормативными документами, в том числе и Правилами Морского
Регистра, установлены предельные минимально допустимые значения Rmin для изоляции типовых электрических устройств и кабельных линий. Выявленные в процессе оперативного (вахтенного) или
технического обслуживания электрооборудования факты снижения
величины R могут свидетельствовать об уменьшении степени
работоспособности изоляции вследствии ее общего старения или
возникновения локальных дефектов.
Однако понижение сопротивления наблюдается и у
качественной изоляции при ее поверхностном увлажнении или
загрязнении. В то же время измеренные значения R Rmin не
гарантируют высокое качество изоляции, так как могут остаться не
выявленными отдельные серьезные дефекты типа несквозного
повреждения, что особенно характерно для многослойной изоляции.
В случае увлажнения таких полостей возможно даже повышение
величины измеряемого сопротивления, так как при относительно
малом токе сквозной проводимости ток абсорбции спадает быстрее,
чем у сухой изоляции.
Высокие значения R могут быть получены и для фактически
неработоспособной изоляции при отсутствии в ней влаги.
Характер контролируемого изменения сопротивления изоляции
во времени не всегда адекватен характеру процесса ее старения,
поскольку на результаты измерений в большой степени влияют
условия внешней среды.
Более информативным параметром является динамическое
сопротивление изоляции R(t), поскольку в некоторой степени
отражает характер процесса междуслоевой поляризации, который
изменяется в зависимости от изменения структуры материала. Однако
используемый в настоящее время показатель динамического
сопротивления,
так
называемый
коэффициент
абсорбции
k a R( t 2 ) / R( t1 ) при t1 15 с и t 2 60 с, малочувствителен к
изменению состояния изоляции.
Поляризационные методы базируются в основном на
измерении электрической емкости изоляции C. В их основе лежит
194
положение о том, что по мере старения изоляции разрушается ее
структура, и в условиях влажной среды возрастает степень
насыщения объема изоляции влагой, что сопровождается
увеличением ее диэлектрической проницаемости. Как показывает
практика, заметное возрастание емкости характерно для изоляции
фактически уже не пригодной к эксплуатации, что не позволяет
прогнозировать ее работоспособность и предотвращать внезапные
отказы.
Частотные методы предполагают использование в качестве
диагностических признаков частотных характеристик таких
электрических параметров изоляции, как R ,C , tg . При исследовании
изоляции в основном определяют C( ) . При этом чаще всего
рассматривается не сама частотная характеристика, а ее показатель в
виде емкостного коэффициента kc C ( 1 ) / C ( 2 ) . В США и Канаде
принято 1 , 2 100 ; в странах Европы 1 4 , 2 100 .
Измеренное значение kc в большинстве случаев растет с
увеличением содержания влаги в изоляционном материале и в
меньшей степени изменяется (или изменяется неоднозначно) в
процессе его старения. Для многослойной изоляции неоднозначное
изменение kc возможно при увлажнении отдельных слоев.
Метод считается несколько более точным при оценке степени
общего объемного увлажнения изоляции по сравнению с
измерением С.
Исследование частичных разрядов имеет место в основном
при лабораторных испытаниях электроизоляционных материалов и
при диагностировании высоковольтного электрооборудования в
стационарных условиях эксплуатации.
Суть его коротко сводится к следующему. При приложении к
изоляции напряжения достаточной величины происходит пробой в
воздушных полостях. При этом все напряжение падает на остальную
часть изоляции, включенную последовательно с воздушной
полостью. Происходит скачкообразное изменение напряженности
поля, в результате чего возникает импульс емкостного тока в
измерительной цепи. После окончания процесса заряда слоев,
включенных последовательно с воздушной полостью, напряженность
поля в воздушном включении снижается и емкостный ток
прекращается. Этот процесс и представляет собой частичный разряд в
изоляции.
195
Поскольку в изоляции имеется большое число воздушных
полостей, то при приложении к ней напряжения, особенно
переменного, разряды происходят весьма часто, и в цепи имеют
место непрерывные высокочастотные несинусоидальные колебания
тока. Амплитуда и интенсивность этих колебаний возрастают по мере
роста числа воздушных включений вследствие старения и расслоения
изоляции.
Приводимые
в
специальной
литературе
результаты
использования этих методов для диагностирования изоляции
свидетельствуют о их малой эффективности.
Импульсные методы основаны на исследовании переходной
характеристики при приложении к изоляции импульсного
испытательного напряжения. Ее вид изменяется с изменением
внутреннего состояния изоляции и может в определенной степени
характеризовать уровень работоспособности. Однако получаемые
результаты для
отдельных видов электрооборудования являются
сугубо индивидуальными. Такие методы целесообразны для
проведения непрерывного контроля работоспособности крупных
электротехнических объектов ответственного назначения.
§ 14.3. Абсорбционный метод диагностирования изоляции
Рассмотренные в предыдущем параграфе неразрушающие
методы и диагностические параметры обладают рядом недостатков,
существенно снижающих эффективность их использования в
эксплуатационных условиях. Основные недостатки: низкая степень
информативности (каждый параметр характеризует лишь одно из
свойств изоляции); малая точность (неадекватность оценки процесса
изменения состояния изоляции); малая чувствительность к
изменению состояния изоляции; зависимость результатов измерений
от условий внешней среды, от степени поверхностного загрязнения и
увлажнения изоляции; невозможность установления единых
количественных критериев даже для однотипных электротехнических
объектов. Этим объясняется то, что ни один из рекомендованных к
использованию диагностических параметров изоляции фактически не
может быть принят в качестве определяющего.
Весьма важным для обеспечения надежного диагностирования
изоляции электрооборудования является установление обобщенного
196
диагностического параметра, которому перечисленные недостатки
были бы присущи в гораздо меньшей степени. Такой параметр может
быть определен на основании анализа процессов, которые
характеризуют внутреннее состояние изоляции и отражают все
происходящие в ней структурные изменения. Это поляризационные
процессы. Их количественную и качественную оценку можно
получить из абсорбционных характеристик, определяющих процессы
изменения тока заряда или разряда изоляции в условиях
междуслоевой поляризации. Считается [1], что абсорбционные
характеристики, особенно на начальном малом интервале времени,
несут большой объем информации о внутреннем состоянии материала
изоляции и, в частности, о степени необратимых изменений ее
диэлектрических свойств.
Связь абсорбционных характеристик с параметрами структуры
изоляции и ее основными свойствами может быть установлена путем
топологического
анализа
электрической
схемы
замещения
многослойной изоляции в режиме ее разряда (рис.14.1) .
Рис.14.1. Электрическая схема замещения
многослойный заряженной изоляции
На схеме U 01 ,U 02 ,...,U 0n значения ЭДС поляризации на
каждом слое изоляции; Rk ,C k ,( k 1, n ) значения активного
сопротивления и емкости каждого k-го слоя; R p сопротивление
Rш
внешней
цепи
(цепи
разряда);
сопротивление,
характеризующее поверхностные утечки; n число слоев,
определяемое количеством различных изоляционных материалов и
технологией формирования изоляции.
197
Без учета саморазряда
n
U 0k U 0 ,
k 1
где U 0 напряжение источника заряда.
Этой схеме замещения в режиме разряда соответствует
ненаправленный граф, показанный на рис.14.2.
Операторы ветвей графа: g1=1/R1, g2=1/R2, ..., gn=1/Rn
активные проводимости слоев; sC1, sC2, ...,sCn емкостные
проводимости слоев; g э 1 / Rш 1 / R p проводимость цепи
разряда; s оператор преобразования Лапласа.
Рис.14.2. Ненаправленный граф схемы замещения
многослойной изоляции в режиме разряда
Общий разрядный ток в цепи разряда представляет собой сумму
токов от действия каждого источника ЭДС. Его выражение в
операторной форме
n
I э ( s ) Ik ( s ),
(14.1)
k 1
где I k ( s ) U 0k ( s )Fk ( s ) ; Fk ( s ) передача для k-го источника.
Для определения передачи Fk ( s ) рассмотрим граф схемы
замещения k-го слоя (источники в остальных слоях закорочены),
приведенный на рис.14.3.
198
Рис. 14.3. Ненаправленный граф схемы замещения k-го слоя
многослойной изоляции в режиме разряда
Операторы его ветвей
y1 ( s ) 1 / Z1 ( s ),..., yn ( s ) 1 / Z n ( s )
представляют собой операторные проводимости слоев (кроме k-го),
Rn
R1
где Z1 ( s )
; . . .; Z n ( s )
.
1 T1 s
1 Tn s
В соответствии с правилом Мэзона передача такого графа имеет
вид
Fk ( s )
sC k / y k ( s )
sC Z ( s )
n k k
.
1 / y1 ( s ) ... 1 / y n ( s ) 1 / g э
Z k Rэ
(14.2)
k 1
Общий разрядный ток из выражения (14.1)
n
U
Iэ( s ) 0
s
1
n
sC k Z k ( s )Rk
k 1
n
,
(14.3)
Rk Z k ( s ) R э
k 1
k 1
ток через разрядное сопротивление
I p( s ) Iэ( s )
Rш
.
Rш R p
(14.4)
Применяя обратное преобразование Лапласа при допущении
R p Rш , что соответствует реальным условиям, получаем
временную функцию тока в цепи разряда
199
n
U0
I p( t )
n
Rk
k 1
где Tk Rk C k ; i
Rk Tk
n
k 1 T
n Ri T k
i 1
k k
k 1 ( i
exp( t / i ) ,
(14.5)
Tk )2
1
корни нижеприведенного уравнения.
si
Rk
Rp .
k 1 Tk
n
(14.6)
Наиболее быстро убывающая экспонента в выражении (14.5)
характеризует ток разряда геометрической емкости изоляции. При
R р 0 она приближается к -функции. Такое допущение дает
возможность рассчитывать составляющие тока абсорбции, определяя
их постоянные времени из уравнения
n1 R
(14.7)
k 0.
T
k 1
k
Полученное выражение (14.5) свидетельствует о зависимости
характера изменения разрядного тока от соотношения электрических
параметров слоев, таких как диэлектрическая проницаемость k и
удельная объемная проводимость k .
Например, для двухслойной изоляции с толщиной и площадью
поверхности каждого k-го слоя соответственно d k и S k
R1T1 R2T2 1d 2 2 d1
.
R1 R2
1d 2 2 d1
(14.8)
Из выражения (14.8) следует, что при старении и увлажнении
одного или обоих слоев изоляции уменьшается, поскольку
величины 1 и 2 растут медленнее, чем 1 и 2 , и ток абсорбции
спадает более круто. Для многослойной изоляции эта тенденция
проявляется в еще большей степени. При этом характер изменения
тока абсорбции не зависит от значения Rш , т.е. от степени
поверхностного загрязнения изоляции.
200
Таким образом, по интенсивности спадания тока абсорбции на
начальном интервале времени разряда изоляции можно судить о ее
внутреннем состоянии, извлекая информацию об изменении таких
основных свойств, как электропроводность и диэлектрическая
проницаемость отдельных слоев.
В
качестве
обобщенного
количественного
признака,
характеризующего
эти
свойства,
автором
предложен
дифференциальный коэффициент абсорбции
kд
I p ( t1 ) I p ( t 2 )
U 0C 0 ( t 2 t1 )
,
(14.9)
где I p ( t1 ), I p ( t 2 ) значения тока разряда, измеренные в моменты
времени t1 и t 2 после начала разряда; C 0 геометрическая емкость
изоляции.
Введение в выражение (14.9) значения C 0 уменьшает степень
влияния
на
результаты
диагностирования
габаритов
электроизоляционных конструкций, что позволяет установить
унифицированные критерии ( k д max ) для широких классов
электрических устройств.
Значения времени t1 и t 2 выбирают таким образом, чтобы к
I p ( t1 )
моменту
измерения
завершился
процесс
разряда
геометрической емкости, но при этом была учтена самая
быстрозатухающая составляющая ―чистого‖ тока абсорбции с
постоянной времени min ( 3R p C t1 min ) , а момент времени t 2
соответствовал времени завершения крутого спада тока разряда.
Для судовых асинхронных двигателей мощностью до 100 кВт
исследованиями установлены значения t1 0 ,02c; t 2 0 ,07c .
Рассмотренный метод относится к числу поляризационных, но
при этом, как видно из проведенного краткого анализа, обладает
определенными достоинствами по сравнению с другими известными
методами этой и других групп.
201
§ 14.4. Сравнительный анализ эффективности диагностических
параметров изоляции
Особенностью
электрической
изоляции
как
объекта
исследования надежности является то, что изменение ее свойств
непосредственно связано с внутренними структурными физикохимическими
превращениями
под
влиянием
комплекса
дестабилизирующих воздействий. Исследование таких объектов, как
отмечалось в § 11.5, обычно производится путем имитационных
циклических испытаний физических моделей (макетов). При этом для
изоляции в качестве основных воздействий принимают температуру
нагрева,
влажность
и
вибрацию.
С
целью
сокращения
продолжительности испытаний ужесточают по сравнению с
расчетным тепловой фактор. Установлено, что для большинства
изоляционных материалов повышение температуры нагрева на 10o C
приводит к двухкратному уменьшению среднего срока службы.
В
качестве
основного
свойства,
характеризующего
работоспособность изоляции, рассматривается ее электрическая
прочность,
которую на практике оценивают как величину
пробивного напряжения U пр .
Таким образом, наиболее убедительный способ оценки
эффективности диагностических параметров изоляции заключается в
установлении связи двух случайных процессов U пр ( t ) и Z ( t ) .
Чувствительность диагностических параметров оценивается
функцией чувствительности в соответствии с выражением (11.24), а
точность величиной корреляционного отношения (11.27) при
X U пр .
Сравнительный анализ эффективности наиболее часто
используемых диагностических параметров изоляции выполнен по
результатам спланированного автором эксперимента, проведенного в
лаборатории ВНИИЭМ под руководством Н.Е.Заева.
Циклическим ускоренным испытаниям на долговечность
подвергались макеты всыпных обмоток асинхронных двигателей,
намотанных проводом ПСДК с имидофлексовой пазовой изоляцией и
пропиточным составом КО-916К. По завершении каждого цикла
производилось измерение диагностических параметров случайной
выборки из десяти макетов и определение для них величины U пр .
202
В качестве диагностических параметров рассматривались
следующие: R60 омическое сопротивление изоляции по
отношению к корпусу макета, измеренное через 60с после
приложения напряжения U 0 500B ; коэффициент абсорбции
ka R60 / R15 ; C 50 электрическая емкость изоляции, измеренная на
частоте 50Гц; емкостный коэффициент k c C 50 / C1000 ; tg 50
тангенс угла диэлектрических потерь, измеренный на частоте 50Гц;
тангенциальный
коэффициент
k tg 50 / tg 1000 ;
kд
дифференциальный коэффициент абсорбции по выражению (14.7)
при t1 0 ,02c ; t 2 0 ,07c .
На рис.14.4. приведены рассчитанные по результатам
эксперимента регрессионные зависимости от времени в циклах
диагностических параметров и Uп р , а также функции чувствительности
диагностических параметров к изменению состояния изоляции по
(11.24).
203
Рис.14.4. Результаты экспериментальной оценки эффективности
диагностических параметров изоляции: а, б, в регрессионные
зависимости; г функции чувствительности
По результатам эксперимента в соответствии с выражением
(11.27) получены следующие значения корреляционного отношения,
характеризующего точность оценки состояния изоляции принятыми к
рассмотрению диагностическими параметрами:
R ,U
K ,U
C ,U
Kc ,U
tg ,U
K ,U
K д ,U
0,897
0,881
0,705
0,718
0,821
0,832
0,986
В табл.14.3. приведены сводные данные ранжирования
диагностических параметров по степени чувствительности и
точности оценки состояния изоляции.
204
Таблица 14.3
Результаты ранжирования диагностических параметров
по степени чувствительности и точности
Параметр
R60
k
C 50
kc
tg
k
kд
Ранг по
чувствительности
6
7
2
4
3
5
1
Ранг по
точности
2
3
7
6
5
4
1
Общий
ранг
2
4
3
4
2
3
1
Исследования состояния изоляции электрических машин
непосредственно в эксплуатационных условиях в целом подтвердили
результаты имитационных испытаний. Однако из-за существенного
влияния условий внешней среды, поверхностного увлажнения и
загрязнения изоляции точность параметра R60 оказалась значительно
ниже, в то же время установлена высокая чувствительность
параметра kc к увлажнению изоляции.
По результатам исследований в качестве основного
определяющего
параметра
предложен
дифференциальный
коэффициент абсорбции kд , параметр kc целесообразно использовать
в качестве вспомогательного для предварительной оценки
увлажнения изоляции. Измерение величины kд следует производить
при уровне увлажнения, характеризуемого диапазоном 1,5 kc 2 ,0 .
Граничные отказовое и предельное значения kд установлены по
результатам экспертных оценок и разрушающих испытаний. Так, для
судовых асинхронных двигателей мощностью до 100 кВт
k д от 300 c 2 , k д пр 150 c - 2 .
205
ПРИЛОЖЕНИЕ 1
СПРАВОЧНЫЕ ТАБЛИЦЫ
Таблица П.1
Значение нормированной функции Лапласа
u
1
0 (u )
exp( u 2 / 2)du, 0 (u ) 0 (u )
2 0
u
0 ( u )
u
0 ( u )
u
0 ( u )
0,00
0,02
0,04
0,06
0,08
0,10
0,12
0,14
0,16
0,18
0,20
0,22
0,24
0,26
0,28
0,30
0,32
0,34
0,36
0,38
0,40
0,42
0,44
0,46
0,48
0,50
0,0000
0,0080
0,0160
0,0239
0,0319
0,0398
0,0478
0,0557
0,0636
0,0714
0,0793
0,0871
0,0948
0,1026
0,1103
0,1179
0,1255
0,1331
0,1406
0,1480
0,1554
0,1628
0,1700
0,1772
0,1844
0,1915
0,52
0,54
0,56
0,60
0,65
0,70
0,75
0,80
0,85
0,90
0,95
1,00
1,05
1,10
1,15
1,20
1,25
1,30
1,35
1,40
1,45
1,50
1,55
1,60
1,65
1,70
0,1985
0,2054
0,2123
0,2257
0,2422
0,2580
0,2734
0,2881
0,3023
0,3159
0,3289
0,3413
0,3583
0,3643
0,3749
0,3849
0,3944
0,4032
0,4115
0,4192
0,4265
0,4332
0,4394
0,4452
0,4505
0,4554
1,75
1,80
1,85
1,90
1,95
2,00
2,05
2,10
2,15
2,20
2,25
2,30
2,35
2,40
2,45
2,50
2,55
2,60
2,65
2,70
2,75
2,80
2,85
2,90
2,95
3,00
0,4599
0,4641
0,4678
0,4713
0,4744
0,4772
0,4798
0,4821
0,4842
0,4861
0,4878
0,4893
0,4907
0,4918
0,4928
0,4938
0,4946
0,4953
0,4960
0,4965
0,4970
0,4974
0,4978
0,4981
0,4984
0,4986
206
Таблица П.2
Квантили нормального распределения
u p F ( p), u / 2 0 ( / 2)
p
up
u / 2
p
up
u / 2
0,5
0,51
0,52
0,53
0,54
0,55
0,56
0,57
0,58
0,59
0,60
0,61
0,62
0,63
0,64
0,65
0,66
0,67
0,68
0,69
0,70
0,71
0,72
0,73
0,74
0,75
0,76
0,77
0,78
0,79
0,80
0,81
0
0,025
0,050
0,075
0,100
0,126
0,151
0,176
0,202
0,228
0,253
0,279
0,305
0,332
0,358
0,385
0,412
0,440
0,468
0,496
0,524
0,553
0,583
0,613
0,643
0,674
0,706
0,739
0,772
0,806
0,842
0,878
0,674
0,690
0,706
0,722
0,739
0,755
0,772
0,789
0,806
0,824
0,842
0,860
0,878
0,896
0,915
0,935
0,954
0,974
0,994
1,015
1,036
1,058
1,080
1,103
1,126
1,150
1,175
1,200
1,227
1,254
1,282
1,311
0,82
0,83
0,84
0,85
0,86
0,87
0,88
0,89
0,90
0,91
0,92
0,925
0,93
0,94
0,95
0,96
0,97
0,975
0,980
0,99
0,991
0,992
0,993
0,994
0,995
0,996
0,997
0,9975
0,9980
0,9990
0,9995
0,9999
0,915
0,954
0,994
1,036
1,080
1,126
1,175
1,227
1,282
1,341
1,405
1,440
1,476
1,555
1,645
1,751
1,881
1,960
2,054
2,326
2,366
2,409
2,457
2,512
2,570
2,652
2,748
2,807
2,878
3,090
3,291
3,719
1,341
1,372
1,405
1,440
1,476
1,514
1,555
1,598
1,645
1,695
1,751
1,780
1,812
1,881
1,960
2,054
2,170
2,241
2,326
2,576
2,612
2,652
2,697
2,748
2,807
2,878
2,968
3,024
3,090
3,291
3,480
3,885
207
Таблица П.3
Квантили распределения Стьюдента
Объем выборки
n
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
40
50
60
80
100
120
500
0,8
3,08
1,89
1,64
1,53
1,48
1,44
1,41
1,40
1,38
1,37
1,36
1,36
1,35
1,34
1,34
1,34
1,33
1,33
1,33
1,33
1,32
1,32
1,32
1,32
1,32
1,32
1,31
1,31
1,31
1,30
1,30
1,30
1,29
1,29
1,29
1,28
Вероятность р
0,95
0,99
12,71
63,66
4,30
9,92
3,18
5,84
2,78
4,60
2,57
4,3
2,45
3,71
2,36
3,50
2,31
3,36
2,26
3,25
2,23
3,17
2,20
3,11
2,18
3,05
2,16
3,01
2,14
2,98
2,13
2,95
2,12
2,92
2,11
2,90
2,10
2,88
2,09
2,81
2,09
2,85
2,08
2,83
2,07
2,82
2,07
2,81
2,06
2,80
2,06
2,79
2,06
2,78
2,05
2,77
2,05
2,76
2,04
2,75
2,02
2,70
2,00
2,68
2,00
2,66
1,99
2,64
1,98
2,63
1,98
2,62
1,96
2,59
0,9
6,31
2,92
2,35
2,13
2,02
1,94
1,89
1,86
1,83
1,81
1,80
1,78
1,77
1,76
1,75
1,75
1,74
1,73
1,73
1,72
1,72
1,72
1,71
1,71
1,71
1,71
1,70
1,70
1,70
1,68
1,68
1,67
1,66
1,66
1,66
1,65
208
0.995
128,32
14,09
7,45
5,60
4,77
4,32
4,03
3,83
3,69
3,58
3,50
3,43
3,37
3,33
3,29
3,25
3,22
3,20
3,17
3,15
3,14
3,12
3,10
3,09
3,08
3,07
3,06
3,05
3,04
2,97
2,94
2,91
2,88
2,87
2,86
2,82
0,999
636,61
31,60
12,92
8,61
6,89
5,96
5,41
5,04
4,87
4,59
4,44
4,32
4,22
4,14
4,07
4,02
3,97
3,92
3,88
3,85
3,82
3,79
3,77
3,75
3,73
3,71
3,69
3,67
3,66
3,55
3,50
3,46
3,42
3,39
3,37
3,31
Таблица П.4
Квантили распределения 2
Число
степеней
свободы f
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
18
20
22
24
26
28
30
35
40
45
50
55
60
65
70
75
80
85
90
100
Вероятность р
0,005
0,025
0,05
0,10
0,90
0,95
0,975
0,995
0
0,010
0,072
0,207
0,412
0,676
0,989
1,34
1,73
2,16
2,60
3,07
3,57
4,07
4,60
5,14
6,26
7,23
8,64
9,89
11,2
12,5
13,8
17,2
20,7
24,3
28,0
31,7
35,5
39,4
43,3
47,2
51,2
55,2
59,2
67,3
0,001
0,051
0,216
0,484
0,831
1,24
1,69
2,18
2,70
3,25
3,82
4,40
5,01
5,63
6,26
6,91
8,23
9,59
11,0
12,4
13,8
15,3
16,8
20,6
24,4
28,4
32,4
36,4
40,5
44,6
48,8
52,9
57,2
61,4
65,6
74,2
0,004
0,103
0,352
0,711
1,15
1,64
2,17
2,73
3,33
3,97
4,57
5,23
5,89
6,57
7,26
7,96
9,39
10,9
12,3
13,8
15,4
16,9
18,5
22,5
26,5
30,6
34,8
39,0
43,2
47,4
51,7
56,1
60,4
64,7
69,1
77,9
0,016
0,211
0,584
1,06
1,61
2,20
2,83
3,49
4,17
4,87
5,58
6,30
7,04
7,79
8,55
9,31
10,9
12,4
14,0
15,7
17,3
18,9
20,6
24,8
29,1
33,4
37,7
42,1
46,5
50,9
55,3
59,8
64,3
68,8
73,3
82,4
2,71
4,61
6,25
7,78
9,24
10,6
12,0
13,4
14,7
16,0
17,3
18,5
19,8
21,1
22,3
23,5
26,0
28,4
30,8
33,2
35,6
37,9
40,3
46,1
51,8
57,5
63,2
68,8
74,4
80,0
85,5
91,1
96,6
102,1
107,6
118,5
3,84
5,99
7,81
9,49
11,1
12,6
14,1
15,5
16,9
18,3
19,7
21,0
22,4
23,7
25,0
26,3
28,9
31,4
33,9
36,4
38,9
41,3
43,8
49,9
55,8
61,7
67,5
73,3
79,1
84,8
90,5
96,2
101,9
107,5
113,1
124,3
5,02
7,38
9,35
11,1
12,8
14,4
16,0
17,5
19,0
20,5
21,9
23,3
24,7
28,1
27,5
28,8
31,5
34,2
36,8
39,4
41,9
44,5
47,0
53,2
59,3
65,4
71,4
77,4
83,3
89,2
95,0
100,8
106,6
112,4
118,1
129,6
7,88
10,6
12,8
14,9
16,7
18,5
20,3
22
23,6
25,2
26,8
28,3
29,8
31,3
32,8
34,3
37,2
40,0
42,8
45,6
48,3
51,0
53,7
60,3
66,8
73,2
79,5
85,7
92,0
89,1
104,2
110,3
116,3
123,3
128,3
140,2
209
ПРИЛОЖЕНИЕ 2
ПРИМЕР РАЗРАБОТКИ ПРОГРАММЫ ПОИСКА ДЕФЕКТОВ
МЕТОДОМ ПОСЛЕДОВАТЕЛЬНО-ГРУППОВЫХ ПРОВЕРОК НА
БАЗЕ ИНФОРМАЦИОННОГО АЛГОРИТМА
Объект представлен функциональной диагностической моделью
в виде структурной схемы причинно-следственных связей,
приведенной на рис.9.1.
Составляем таблицу состояний S i отказавшего объекта при
одном дефекте с учетом вероятности состояний объекта,
определяемых возможными дефектами
p( S i ) , и стоимости
проведения проверок c j (табл. П.5). В таблице индекс i обозначает
номер дефектного элемента, индекс j номер элемента на выходе
которого производится проверка.
Таблица П.5
Таблица состояний объекта
Si
S1
S2
S3
S4
S5
S6
с j , у .е .
Проверки j
1
2
3
4
5
6
p( S i )
0
1
1
1
1
1
2
1
0
1
1
1
1
2
0
0
0
1
1
1
3
1
0
1
0
1
1
4
0
0
0
0
0
1
3
0
0
0
0
0
0
1
0,15
0,1
0,3
0,2
0,1
0,15
По формуле (9.3) рассчитываем показатели информативности
разрешенных проверок на первом этапе. Из табл.П.5 видно, что
разрешенными (при условии возможности их реализации) являются
все проверки, кроме 6 , дающей для всех состояний объекта
одинаковые результаты (0), т.е. не несущей никакой информации для
поиска дефекта.
210
Показатель информативности проверки 1
I ( 1 ) p( 11 ) log p( 11 ) p( 10 ) log p( 10 )
0,85 log 0,85 0,15 log 0,15 0,609 ,
1
где p(1 ) p(S2 ) p(S3 ) p(S4 ) p(S5 ) p(S6 ) 0,1+0,3+0,2+
0
+0,1+0,15=0,85; p ( 1 ) p ( S1 ) 0,15 .
Показатель информативности проверки 2
I ( 2 ) p( 21 ) log p( 21 ) p( 20 ) log p( 20 )
0,9 log 0,9 0,1log 0,1 0,469 ,
1
где p( 2 ) p(S1 ) p(S3 ) p(S4 ) p(S5 ) P(S6 ) 0,15+0,3+0,2+
0
+0,1+0,15=0,9; p( 2 ) p( S 2 ) 0,1 .
Аналогичным
образом
рассчитываем
показатели
информативности остальных проверок. Полученные результаты:
I ( 3 ) 0,993; I ( 4 ) 0,881; I ( 5 ) 0,609 .
В качестве проверки первого этапа выбираем проверку 3 , как
наиболее информативную.
На рисунке начинаем строить дерево решений с начальной
вершиной 3 , которой соответствуют все возможные состояния
объекта.
По результатам проверки 3 (0 и 1) получаем совокупности
0
1
состояний E3 S1, S2 , S3 и E3 S4 , S5 , S6 , для каждой их которых
на
втором
этапе поиска дефекта определяем
наиболее
информативные проверки из числа разрешенных.
0
Для E3 разрешенными являются проверки 1 , 2 , 4 , а для
E31 4 , 5 .
211
Оптимальная программа поиска дефекта
в виде дерева решений
Показатели информативности проверок для
состояний E30 :
I ( 30 / 1 ) p( 30 / 11 ) log p( 30 / 11 )
совокупности
p( 30 / 10 ) log p( 30 / 10 )
0,4 log 0,4 0,15 log 0,15 0,939 ,
0
1
0
0
где p( 3 / 1 ) p(S 2 ) p(S 3 ) 0,1 0,3 0,4; p( 3 / 1 ) p(S1 ) 0,15 .
I ( 30 / 2 ) 0,45 log 0,45 0,1log 0,1 0,851 ;
I ( 30 / 4 ) 0,851 .
0
Здесь обозначение I ( 3 / 1 ) означает информативность
проверки 1 , проводимой после проверки 3 с результатом ―0‖.
Наиболее информативная проверка на втором этапе для
0
совокупности состояний объекта E3 1 .
Показатели информативности проверок второго этапа для
1
совокупности состояний объекта E 3 :
I ( 31 / 4 ) p( 31 / 41 ) log p( 31 / 41 )
p( 31 / 40 ) log p( 31 / 40 )
0,25 log 0,25 0,2 log 0,2 0,964 ,
212
1
1
1
0
где p( 3 / 4 ) p(S5 ) p(S6 ) 0,1 0,15 0,25 ; p( 3 / 4 ) p(S4 ) 0,2 .
I ( 31 / 5 ) 0,15 log 0,15 0,3 log 0,3 0,932 .
Наиболее информативная проверка 4 . Полученные
результаты отражаем на дереве решений.
На третьем этапе рассматриваем совокупности состояний
объекта, определяемые результатами проверок 30 / 10 , 30 / 11, 31 / 40 и
00
01
10
11
31 / 41 . Это соответственно E3,1 , E3,1 , E3,4 , E3,4 .
00
Из табл.П.5 видно, что E3,1 S1 , т.е. по результатам проверок
30 / 10 получаем висячую вершину, соответствующую состоянию
01
объекта S 3 (дефекту третьего элемента). Совокупность E3,1 S2 , S3
и для нее разрешенные проверки 2 и 4 . Показатели их
информативности:
I ( 30 / 11 / 2 ) p( 30 / 11 / 21 ) log p( 30 / 11 / 21 )
p( 30 / 11 / 20 ) log p( 30 / 11 / 20 )
0,3 log 0,3 0,1log 0,1 0,853 ,
где
p( 30 / 11 / 21 ) p(S3 ) 0,3 ; p( 30 / 11 / 20 ) p(S2 ) 0,1.
I ( 30 / 11 / 4 ) p(S3 ) log p(S3 ) p(S2 ) log p(S2 ) 0,853 .
Показатели информативности для рассматриваемых проверок
одинаковые. Выбираем для реализации проверку 2 , по меньшей
величине затрат. После ее проведения получим совокупности
состояний E3,1, 2 S2 и E3,1, 2 S3 , т.е. возможные дефекты второго и
третьего элементов определены.
10
Для совокупности E3, 4 S4 проверка 4 при результате ―0‖
сразу определяет дефект четвертого элемента.
010
011
Для совокупности E3, 4 S5 , S6 единственной разрешенной
проверкой является проверка 5 , по результатам которой определяются
11
213
состояния S5 и S 6 . Построенный граф представляет собой
оптимальную по числу проверок программу поиска дефекта.
Если стоимости проведения проверок неизвестны или
одинаковы, исходную таблицу состояний можно упростить за счет
исключения заведомо наименее информативных проверок. Так, для
рассматриваемого примера сразу же исключается проверка 6 , как не
несущая информации об отказавшем объекте.
С целью оценки возможности сокращения числа проверок,
первоначально
принятых
к
рассмотрению,
составим
и
проанализируем таблицу попарного сравнения всех состояний
объекта (табл.П.6.). Если состояния различаются проверкой,
обозначаем как 1, если не различаются, — 0.
Таблица П.6.
Таблица пар состояний объекта
Пары состояний
Проверки
Si S j
1
2
3
4
5
S1 S 2
S1 S 3
S1 S 4
S1 S 5
S1 S 6
S 2 S3
S2 S4
S 2 S5
S2 S6
S3 S 4
S3 S5
S3 S 6
S 4 S5
S4 S6
S5 S 6
1
1
1
1
1
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
1
1
1
1
0
0
0
0
0
0
0
0
1
1
1
0
1
1
1
1
1
1
0
0
0
1
0
1
0
0
1
0
1
1
1
0
0
1
1
0
0
0
0
0
1
0
0
0
1
0
0
1
0
1
1
Анализ табл.П.6. показывает, что проверка 3 различает 9 пар
состояний, 4 8 пар, 1 , 2 , 5 по 5 пар.
214
Отметим
пары
состояний,
различаемые
наиболее
информативной проверкой 3. Это пары S1S2, S1S5, S1S6, S2S4, S2S5, S2S6,
S3S4, S3S5, S3S6. Отметим пары состояний, различаемые проверкой 4
из числа пар, не различаемых проверкой 3. Это пары S1S2, S2S3, S4S5,
S4S6. Из оставшихся, не различаемых проверками 3 и 4 пар
состояний, S1S3 различаются проверкой 1, а S5S6 проверкой 5.
Проверку 2 исключаем из дальнейшего рассмотрения,
поскольку она не дает дополнительной информации по различимости
пар состояний.
Среднестатистическое число проверок, необходимых для
определения дефекта по приведенному на рисунке дереву решений, в
соответствии с выражением (9.4)
mср = 1·0 + 2(p(S 1) + p(S4)) +
+ 3(p(S2) + p(S3) + p(S5) + p(S6)) =
= 2·0,35 + 3·0,65 = 2,65.
Среднестатистическая стоимость поиска дефекта по формуле
(9.5)
6
3
6
i 1
i 1
i 4
3
6
i 2
i 5
Cср с3 p( S i ) с1 p( S i ) с4 p( S i )
с 2 p ( S i ) с5 p ( S i )
3 1 2 0,55 4 0,45 2 0,4 3 0,25 7,45 у.е.
При заданных значениях времени выполнения проверок по
формуле (9.6) можно рассчитать среднестатистическую
продолжительность поиска дефекта.
215
СПИСОК ЛИТЕРАТУРЫ
1. Вайда Д. Исследование повреждений изоляции. М.:
Энергия, 1968. 400с.
2. Глазунов Л.П., Грабовецкий В.П., Щербаков О.В. Основы
теории надежности автоматических систем управления: Учебное
пособие для вузов. Л.: Энергоатомиздат, 1984. 208с.
3. Гнеденко Б.Ф., Беляев Ю.К., Соловьев А.Д. Математические
методы в теории надежности. М.: Наука, 1965. 275с.
4. Голинкевич Т.А. Прикладная теория надежности: Учебник
для вузов. М.: Высшая школа, 1985. 168с.
5. Гуменюк В.М. Технология монтажа и ремонта судового
электрооборудования: Учебное пособие для вузов. Владивосток:
Изд-во Дальневост. ун-та, 1992. 164с.
6. Давыдов П.С. Техническая диагностика радиоэлектронных
устройств и систем. М.: Радио и связь, 1988. 256с.
7. Диллон Б., Сингх Ч. Инженерные методы обеспечения
надежности систем. М.: Мир, 1984. 318с.
8. Калявин В.П., Мозгалевский А.В., Галка В.Л. Надежность и
техническая
диагностика
судового
электрооборудования
и
автоматики: Учебник. СПБ.: Элмор, 1996. 296с.
9. Мозгалевский А.В., Гаскаров Д.В. Техническая диагностика
(непрерывные объекты): Учебное пособие для вузов. М.: Высшая
школа, 1975. 207с.
10.
Мозгалевский А.В.,
Калявин В.П.,
Костанди Г.Г.
Диагностирование электронных систем. Л.: Судостроение, 1984.
224с.
11. Половко А.М. Основы теории надежности. М.: Наука,
1964. 224с.
12. Половко А.М., Маликов И.М.,Жигарев А.Н. Сборник задач
по теории надежности. М.: Сов. радио, 1972. 406с.
13.
Рябинин И.А.,
Киреев Ю.Н.
Надежность
судовых
электроэнергетических систем и судового электрооборудования:
Учебник для вузов. Л.: Судостроение, 1974. 264с.
14. Рябинин И.А., Черкесов Г.Н. Логико-вероятностные методы
исследования надежности структурно-сложных систем. М.: Радио
и связь, 1981. 264с.
15. Шор Я.Б. Статистические методы анализа контроля качества
и надежности. М.: Сов. радио, 1962. 552с.
216
16. ГОСТ 20911-89. Техническая диагностика. Термины и
определения. М.: Изд-во стандартов, 1990. 13с.
17. ГОСТ 26656-85.
Техническая
диагностика.
Контролепригодность. Общие требования. М.: Изд-во стандартов,
1986. 15с.
18. ГОСТ 27.002-89. Надежность в технике. Основные понятия,
термины и определения. М.: Изд-во стандартов, 1990. 37с.
19. ГОСТ 27518-87. Диагностирование изделий. Общие
требования. М.: Изд-во стандартов, 1988. 6с.
20. ГОСТ 27.410-87. Надежность в технике. Методы контроля
показателей надежности и планы контрольных испытаний на
надежность. — М.: Изд-во стандартов, 1988. — 110с.
217
Гуменюк Виктор Макарович
НАДЕЖНОСТЬ И ДИАГНОСТИКА
ЭЛЕКТРОТЕХНИЧЕСКИХ СИСТЕМ
Учебное пособие
Редактор Е.П.Горовенко
Технический редактор И.Д.Стукалова
Корректор Л.В.Моисеева
ИБ №106
ЛР №020466 от 04.03.97г.
Подписано в печать 17.01.98. Формат 60х84/16.
Печать офсетная. Усл.п.л. 13,1. Уч.-изд.л. 9,2
Тираж 1000 экз. Заказ 099
Цена ―С‖.
Отпечатано в типографии издательства ДВГТУ.
690600, Владивосток, ул. Пушкинская, 10.
218