Синтез профиля кулачка
advertisement

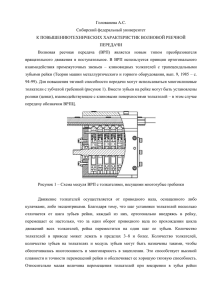
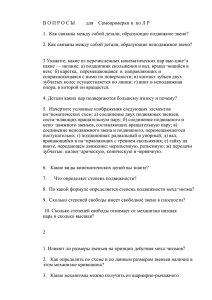
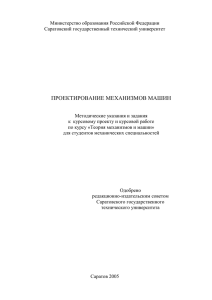
Синтез профиля кулачка Методические указания к курсовому проектированию по дисциплинам «Теория механизмов и машин», «Техническая механика», «Прикладная механика» для студентов всех форм обучения Составители: А. В. Орестова Т. С. Грибкова Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Санкт-Петербургский государственный университет технологии и дизайна» Кафедра теоретической и прикладной механики СИНТЕЗ ПРОФИЛЯ КУЛАЧКА Методические указания к курсовому проектированию по дисциплинам «Теория механизмов и машин», «Техническая механика», «Прикладная механика» для студентов всех форм обучения Составители: А. В. Орестова Т. С. Грибкова Санкт-Петербург 2008 2 Утверждено на заседании кафедры 14.05.2008 г., протокол №6 Рецензент В. В. Сигачева Аннотация Методические указания «Синтез профиля кулачка» предназначены для выполнения курсового проекта по дисциплине «Теория механизмов и машин» и самостоятельного изучения студентами всех форм обучения раздела «Синтез и анализ различных типов плоских кулачковых механизмов». В настоящих методических указаниях рассматривается синтез профиля кулачка для механизмов с поступательным и вращательным движением толкателя двумя методами: графо-аналитическим и аналитическим. Кроме этого дается понятие об углах давления и влияния их на габаритные параметры механизмов. Оригинал подготовлен составителями. Подписано в печать 3.10.2008 г. Формат 60 х 84 1/16. Печать трафаретная. Усл. печ. л. 1.7. Тираж 200 экз. Заказ Отпечатано в типографии СПГУТД 191028, С.-Петербург, ул. Моховая, 26 3 ВВЕДЕНИЕ Выполнение технологических и вспомогательных операций в современном машиностроении чаще всего осуществляется кулачковыми механизмами. Эти механизмы обладают широкими возможностями выполнения сложных законов движения выходных звеньев. Кулачковыми механизмами можно осуществить точный выстой или несколько выстоев толкателя, что невозможно выполнить рычажными механизмами. В машиностроении применяют различные типы кулачковых механизмов как плоские, так и пространственные. Проектирование и изготовление пространственных механизмов более сложно по сравнению с плоскими, но их применение часто упрощает общую кинематическую схему автоматического устройства, так как при этом отпадает необходимость применения дополнительных пространственных передач. В машинах-автоматах с жесткими связями кулачковые механизмы производят «жесткое» программирование выполняемого технологического процесса. В машинах-автоматах с электрическими, гидравлическими и пневматическими связями кулачковые механизмы часто выполняют функции управления с помощью следящих устройств. Однако, несмотря на явное преимущество, ограниченное применение кулачковых механизмов связано с рядом их недостатков. Кинематическая пара «кулак-толкатель» относится к «высшим» парам, где контакт между соприкасающимися звеньями теоретически происходит по линии или точке, но практически с учетом упругости звеньев контакт происходит по площади. При этом в зоне контакта возникают значительные удельные давления и, следовательно, большой износ поверхностей. Поэтому рабочая поверхность кулачка упрочняется либо цементированием, либо каким другим способом. Основным требованием качественной работы механизмов является непрерывный контакт в кинематической паре «кулак-толкатель». При использовании кулачковых механизмов в высокоскоростых машинах возможна потеря контакта за счет значительных величин сил инерции толкателя. Это обстоятельство ведет к нарушению технологического цикла, а следовательно, к снижению качества выпускаемой продукции. Такой недостаток можно исправить оптимальным выбором закона ускорения толкателя, при котором необходимо учитывать колебательные процессы, происходящие в кулачковых механизмах. Выбор закона движения толкателя обычно осуществляется методом безразмерных характеристических функций, изложенным в методических указаниях [1]. В настоящих методических указаниях рассматриваются метод синтеза профиля кулачка и выбор оптимальных конструктивных размеров кулачковых механизмов при заданном законе ускорения толкателя в безразмерной форме и заданных параметрах кинематической схемы. 4 1. ОБЩИЕ СВЕДЕНИЯ О КУЛАЧКОВЫХ МЕХАНИЗМАХ Рабочий процесс многих машин вызывает необходимость иметь в их составе механизмы, движение выходных звеньев которых должно быть выполнено строго по заданному закону. Для выполнения такой задачи наиболее простыми и надежными являются кулачковые механизмы. Закон движения толкателя определяется профилем кулачка. Профиль кулачка может иметь различную конфигурацию, что обеспечивает выполнение сложных законов движения толкателя, в том числе наличие выстоев толкателя на определенных участках цикла работы машины. Кулачковый механизм представляет собой трехзвенный механизм, состоящий из стойки, входного звена – кулачка и выходного звена – толкателя (рис. 1). Рис. 1. Кулачковые механизмы общего вида На рис. 1 представлены механизмы с поступательным движением толкателя, оканчивающиеся острием или роликом. Степень подвижности кулачкового механизма, без учета ролика, определяется по формуле Чебышева. W=3n – 2P5 – 1P4 =3 3 – 2 2 – 1 1=1, где n – число подвижных звеньев (n =3); Р5 – число кинематических пар 5-го класса (Р5=2); Р4 – число кинематических пар 4-го класса (Р4=1). Согласно формуле Чебышева степень подвижности такого механизма равна единице. 5 .На рис. 2 представлены различные типы кулачковых механизмов. а в б д г ж е з Рис. 2. Схемы кулачковых механизмов 6 Кулачковые механизмы могут быть плоскими (рис. 2, а – 2, ж) и пространственными (рис. 2, з). При этом толкатель кулачкового механизма может совершать различные движения: поступательное, вращательное, сложное. На рис. 2 представлены механизмы с поступательным движением толкателя (рис. 2, а, г, д, з) и вращательным движением толкателя (рис. 2, б, в, е, ж). Постоянный контакт толкателя и кулачка (пара 4-го класса) осуществляется силовым или кинематическим замыканием. Силовое замыкание осуществляется пружиной, силой тяжести или давлением жидкости. Кинематическое замыкание осуществляется установкой контр-кулака, (рис. 2, е), толкателя в виде рамки (рис. 2, д), пазовых кулачков (рис. 2, ж, з). 2. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ОБОЗНАЧЕНИЯ В КУЛАЧКОВЫХ МЕХАНИЗМАХ Ниже приводятся основные определения и обозначения, используемые при анализе и синтезе кулачковых механизмов. В настоящих методических указаниях рассматриваются два типа механизмов: кулачковые механизмы с поступательным и вращательным движениями толкателя. Кулачковые механизмы с поступательным движением толкателя могут быть центральными и нецентральными. Центральный кулачковый механизм – кулачковый механизм с поступательным движением толкателя, у которого линия движения толкателя смещена относительно оси вращения кулачка (рис. 3). Нецентральный кулачковый механизм – кулачковый механизм с поступательным движением толкателя, когда линия движения толкателя проходит через ось вращения кулачка (рис. 4). Данное смещение называется эксцентриситетом и обозначается буквой «е». В координатных осях эксцентриситет может принимать как положительное так и отрицательное значения. Закон движения толкателя определяется профилем кулачка. Если толкатель оканчивается роликом, то различают практический и теоретический профили кулачка: практический профиль – это кривая, ограничивающая внешнюю поверхности тела кулачка, на которой происходит контакт толкателя (ролика толкателя) с кулачком; теоретический профиль – кривая, проходящая через центр ролика и проведенная эквидистантно к практическому профилю на расстоянии радиуса ролика (рис. 3). 7 Толкатель бст бст уд уд max Максимальное перемещение толкателя R0 Ролик толкателя Теоретический профиль Практический профиль уд r0 воз дст дст дст воз воз Рис. 3. Центральный кулачковый механизм e III бс бс уд уд+ бс max уд дс воз воз воз- дс дс Рис. 4. Нецентральный кулачковый механизм 8 Начальная шайба – окружность c наименьшим радиусом профиля кулачка, проведенная из его центра вращения; r0 – радиус начальной шайбы практического профиля; R0 r0 – радиус начальной шайбы теоретического профиля, где ρ – радиус ролика. Профиль кулачка, обеспечивающий закон движения толкателя, делится на участки с соответствующими профильными углами. Профильные углы: угол профиля удаления ( уд ) – под действием этого профиля происходит удаление толкателя от нулевого положения в крайнее дальнее положение; угол профиля дальнего выстоя ( дст ) – под действием этого профиля происходит выстой толкателя в крайнем дальнем положении. Кривая профиля представляет собой дугу окружности, проведенную из центра вращения кулачка; угол профиля возвращения ( воз ) – под действием этого профиля толкатель возвращается в нулевое положение; угол профиля ближнего выстоя ( бст ) – под действием этого профиля толкатель выстаивает в нулевом положении. Кривая профиля представляет собой дугу окружности начальной шайбы. Сумма профильных углов равна 3600: уд дст воз бст 360o . При анализе и синтезе кулачковых механизмов используются поворотные углы кулачка. Поворотные углы: поворотный угол удаления ( уд ) – при повороте кулачка на данный угол происходит удаление толкателя от нулевого положения в крайнее дальнее; поворотный угол дальнего выстоя ( дст ) – при повороте кулачка на данный угол происходит выстой толкателя в крайнем дальнем положении; поворотный угол угол возвращения ( воз ) – при повороте кулачка на данный угол толкатель возвращается в нулевое положение; поворотный угол ближнего выстоя ( бст ) – при повороте кулачка на данный угол толкатель выстаивает в нулевом положении. Сумма поворотных углов также как и профильных углов равна 3600: уд дст воз бст 360о 9 Для центрального кулачкового механизма поворотные и профильные углы равны уд уд ; воз воз ; дст дст ; бст бст . Для нецентрального кулачкового механизма поворотные и профильные углы на участках удаления и возвращения отличаются на дополнительный угол (рис. 4). При положительном знаке эксцентриситета уд уд ; воз воз . При отрицательном знаке эксцентриситета уд уд ; воз воз . На участках дальнего и ближнего стояния поворотные и профильные углы равны. дст дст ; бст бст . Профильные и поворотные углы для коромыслового кулачкового механизма также различаются на угол (рис. 5). бст max = O2 ? O* 2 O1 max дст дст = - Рис. 5. Коромысловый кулачковый механизм 10 + 3. СИНТЕЗ ПРОФИЛЯ КУЛАЧКА ДЛЯ РАЗЛИЧНЫХ ВИДОВ КУЛАЧКОВЫХ МЕХАНИЗМОВ Профиль кулачка можно спроектировать двумя методами: графоаналитическим и аналитическим. Графоаналитический метод является приближенным. Он выполняется для проверки расчетов, выполненных аналитическим методом, когда при расчете и изготовлении кулачка используется ЭВМ. Для синтеза профиля кулачка необходимо иметь кинематическую схему механизма и закон перемещения толкателя П . Закон перемещения толкателя в большинстве случаев получают с использованием метода безразмерных характеристических функций, учитывающий заданные динамические параметры. В методических указаниях «Аналитический метод синтеза кулачкового механизма при использовании ЭВМ» [1] приведены три типовых задачи синтеза, которые имеют наибольшее распространение в инженерной практике. 3.1. Основные параметры диаграммы П На рис. 6 представлена диаграмма перемещения толкателя П , где – линейное или угловое перемещение толкателя, – угол поворота кулачка. Дальний выстой Рабочий (прямой) ход IV III III Холостой (обратный) ход VI II II V V I I i VI i i VI 2 4 i Разбег 8 I II Выбег Участок постоянной скорости III IV V VI VII o 360 Разбег Выбег Участок Ближний постоянной выстой Рис. 6. Общий вид закона движения толкателя 11 Диаграмма перемещения толкателя представляет собой совокупность трех участков: ● участок рабочего (прямого) хода; ●участок дальнего выстоя; ●участок холостого (обратного) хода. (Участок ближнего выстоя, как правило, не рассматривается). ■ участок разбега – изменение скорости толкателя от нуля до максимума; ■ участок постоянной скорости – скорость толкателя постоянная; ■ участок выбега – изменение скорости толкателя от максимума до нуля; (На участке холостого хода участок постоянной скорости обычно отсутствует). Закон движения толкателя (ведомого звена) определяется по следующим данным: ● III – максимальный ход толкателя; ● 0 III – угол рабочего хода, px ; max ● III IV – угол дальнего выстоя ( дст ); ● IV VII – угол холостого хода xx max ; ● параметры закона ускорения толкателя для всех участков рабочего и холостого ходов. В результате выполненных расчетов по методике, изложенной в [1], студент определяет структурные параметры диаграммы П (координаты основных точек диаграммы): I I , I ; II II, II ; III III, III ; IV IV, IV ;V V, V ; VI VI , VI . После соответствующей проверки на ЭВМ студент получает распечатку данных для диаграмм: П – перемещение толкателя – beta; П – первая передаточная функция (аналог скорости) – pb; П – вторая передаточная функция (аналог ускорения) – ppb. Каждый из участков рабочего и холостого ходов в распечатке разделен на 10 равных частей, т. е. имеются 10 точек с соответствующими координатами, по которым студент строит диаграммы , , . Понятие о методе обращенного движения Для нахождения профиля кулачка любой конструкции механизма применяется метод обращенного движения. Суть метода заключается в том, что 12 всей системе (кулачок и толкатель) задается движение вокруг оси вращения кулачка с угловой скоростью ( кул ). Кулачок, имея угловую скорость ( кул ) и получив дополнительную угловую скорость ( кул ), останавливается, а толкатель движется вокруг кулачка со скоростью ( кул ). При обращенном движении характер относительных перемещений между кулачком и толкателем остается таким же, как и при обычном движении. 3.2 . Графоаналитический метод синтеза профиля кулачка 3.2.1. Синтез профиля кулачка при поступательном движении толкателя (рис. 7) Рассмотрим синтез профиля кулачка для нецентрального кулачкового механизма. При синтезе профиля кулачка используются следующие данные: r0 – радиус начальной шайбы практического профиля; – радиус ролика; R 0 = r0 + – радиус начальной шайбы теоретического профиля; е – эксцентриситет; – данные диаграммы перемещения толкателя (см. распечатку). Начинаем синтез профиля кулачка с выбора масштаба K M , исходя из планируемого размера чертежа (рис. 7, б). Из центра O1 проводим окружность радиусом R 0 . От центра O1 , на расстоянии равном эксцентриситету «е», проводим линию движения центра ролика толкателя. На пересечении этой прямой и проведенной окружности получаем точку 0 . Данная точка соответствует нулевому положению центра ролика толкателя. От точки 0 на траектории центра ролика отложим в масштабе K M максимальный ход толкателя и обозначим точку III . Соединим точку III с центром O1 . Зададим системе «кулак-толкатель» обращенное движение вокруг центра O1 с угловой скоростью ( кул ). При этом кулак останавливается, а толкатель будет вращаться вокруг центра O1 со скоростью ( кул ). Точка III будет перемещаться по окружности радиуса O 1 III , проходя последовательно поворотные углы i. Отметим на построенной окружности концы дуг со* ответствующих углов поворота как i. 13 i k VT i* 2 4 8 * i Практический профиль i (max) i 0 k О1 К R0 e а VT I I* I*I k * *IV * D * II II V I III I III 0,VI IV О1 V V Теоретический профиль б III ,IV е VI VI * К k Рис. 7. Построение профиля нецентрального кулачкового механизма 14 Линия движения центра ролика должна всегда находится на расстоянии эксцентриситета «е» от центра O1 . Для этого проведем из центра O1 окружность радиусом O 1 K e . Тогда касательная к этой окружности в обращенном движении будет линией движения центра ролика толкателя. Для построения теоретического и практического профилей кулачка рассмотрим построение для одного положения механизма (рис. 7, а). Построение профиля кулачка для i-го положения механизма производится в следующей последовательности: 1) на окружности, проведенной радиусом O 1 III , от точки III отложим в направлении ( кул ) дугу, соответствующую поворотному углу i и обозначим ее конец *i ; 2) из точки i проведем касательную к окружности радиуса O 1 K e . На касательной должна находится точка теоретического профиля кулачка; 3) отложим от 0 перемещение толкателя i . Затем проведем дугу радиусом O 1 i в направлении угловой скоростью ( кул ) до пересечения с касательной. Полученная точка пересечения есть точка теоретического профиля кулачка для положения « i ». Следует заметить, что точку « i » можно построить, отложив расстояние 0 i на касательной от точки пересечения ее с окружностью начальной шайбы. Этот метод может быть более точным, так как при построении дуг большого радиуса может быть сдвиг центра окружности. Рекомендуется сначала построить основные точки профиля кулачка, которые соответствуют границам участка разбега, участка постоянной скорости и выбега, для рабочего и холостого ходов, а затем, согласно распечатки, получить промежуточные точки на данных участках. Для построения основных точек профиля кулачка (рис. 7, б) отложим на траектории точки III , принадлежащей толкателю, при движении ее в обращенном движении вокруг центра О1 дуги соответствующие поворотным углам I , II , III , IV , V , VI , VII и обозначим концы дуг I , II , III , IV , V , VI , VII . Из данных точек проведем касательные к окружности радиуса эксцентриситета «е». Эти прямые есть линии движения центра ролика толкателя в обращенном движении. 15 KM Затем на траектории центра ролика от точки 0 отложим в масштабе расстояния I , II , III , IV , V , VI , VII и проведем из центра O1 дуги радиусами O1I , O1II , O1III , O1 IV , O1 V , O1 VI , O1VII .до пересечения с соответствующими линиями действия толкателя в обращенном движении. Полученные точки пересечения I, II, III, IV, V, VI есть основные точки теоретического профиля кулачка. На каждом из участков профиля кулачка, согласно распечатке, можно получить 10 промежуточных точек, построение которых аналогично построению точки « i ». Для получения кривой теоретического профиля построенные точки соединяют лекальной кривой и затем методом обкатки получают практический профиль. Теоретический профиль Практический профиль Рис. 8. Метод обкатки 3.2.2. Синтез профиля кулачка при вращательном движении толкателя (рис. 9) Рассмотрим синтез профиля кулачка для коромыслового кулачкового механизма. При синтезе профиля кулачка используются следующие данные: r0 – радиус начальной шайбы практического профиля; – радиус ролика; R 0 = r0 + – радиус начальной шайбы теоретического профиля; ℓ– длина коромысла; X O 2 , YO 2 – координаты оси вращения толкателя-коромысла; – данные диаграммы перемещения толкателя (см. распечатку). В зависимости от условий поставленной задачи перемещение толкателя может быть выражено в градусах, радианах или длиной дуги траектории центра ролика толкателя. Рассмотрим случай, когда перемещение толкателя (коромысла) задано в градусах. 16 * i i i i i 0 l O2 i L R0 O1 а * * II * I III III, IV II I max V * IV I II III II * I 0 O2 l L III IV I IV O1 R0 V V б V VI *VI Рис. 9. Синтез профиля коромыслового кулачка 17 Начинаем синтез профиля кулачка с выбора масштаба K M , исходя из планируемого размера чертежа (рис. 9, б). Из центра O1 проводим окружность радиусом R 0 . Из центра O2 проводим дугу радиусом, равным длине коромысла ℓ. На пересечении этой дуги и окружности получаем точку 0 . Данная точка соответствует нулевому положению центра ролика толкателя. Соединив точку 0 с центром O2 , получим нулевое положение толкателя. Зададим системе «кулак-толкатель» обращенное движение вокруг центра O1 с угловой скоростью ( кул ). При этом кулачок останавливается, а толкатель вместе со стойкой O2 будет вращаться вокруг центра O1 со скоростью ( кул ). Точка O2 будет перемещаться по окружности радиуса O1 O 2 , проходя последовательно дуги, соответствующие поворотным углам i . Построение профиля кулачка для i-го положения механизма производится в следующей последовательности: 1) на окружности, проведенной радиусом O1 O 2 , от точки O2 отложим дугу в направлении ( кул ), соответствующую поворотному углу i и обозначим ее конец O2i ; 2) из точки O2i проведем дугу радиусом длины коромысла ℓ. На данной дуге должна находится точка теоретического профиля кулачка; 3) отложим от нулевого положения толкателя O 2 0 перемещение толкателя i , в данном случае в градусах, и проведем дугу радиусом O1 i до пересечения с дугой, проведенной из точки O2i радиусом длины коромысла ℓ. Полученная точка пересечения этих дуг есть точка теоретического профиля кулачка для положения « i ». Рекомендуется сначала построить основные точки профиля кулачка для рабочего и холостого ходов, которые соответствуют границам участка разбега, участка постоянной скорости и выбега, а затем, согласно распечатке, получить промежуточные точки на данных участках. Для построения основных точек профиля используем правило построения i -й точки профиля описанного выше. 1. На окружности, проведенной радиусом O1 O 2 ( кул ) от прямой 18 в направлении O1 O 2 отложим дуги, соответствующие поворотным уг лам I , II , III , IV , V , VI , VII и обозначим их концы дуг O2*I , O2*II , O2*III , O2IV , O2V , O2VI . 2. Из данных точек O2i проведем дуги радиусом длины коромысла ℓ. На данных дугах должны находиться точки теоретического профиля кулачка. 3. Отложим от нулевого положения толкателя O 2 0 перемещения толкателя I , II , III , IV , V , VI , VII и проведем дуги радиусом O1i до пересечения с дугами, проведенными из точки O2i радиусом длины коромысла ℓ. Полученные точки пересечения этих дуг есть точки теоретического профиля кулачка I , II , III , IV , V , VI 4. АНАЛИТИЧЕСКИЙ МЕТОД ПОСТРОЕНИЯ ПРОФИЛЯ КУЛАЧКА ДЛЯ РАЗЛИЧНЫХ ВИДОВ КУЛАЧКОВЫХ МЕХАНИЗМОВ Чтобы спроектировать профиль кулачка, необходимо найти для ряда последовательных точек профиля кулака, т.е. определить величины радиусов-векторов Ri и соответствующих им значения профильных углов γi. Ввиду того, что анализ и синтез кулачковых механизмов осуществляется по теоретическому профилю, то радиусы-векторы профиля кулачка будут получены для теоретического профиля. Аналитический метод используется для построения алгоритма программы при изготовлении кулачков на станках с программным управлением. 4.1. Нецентральный кулачковый механизм (рис. 10) Для расчета параметров профиля кулачка введем следующие обозначения: ♦ Ri – искомый радиус-вектор профиля кулачка; ♦ γi – искомый профильный угол; ♦ βi – перемещение толкателя из положения «0» в положение «i»; ♦ φi – поворотный угол; ♦ θ i – дополнительный угол; ♦ R0 – радиус начальной шайбы теоретического профиля; ♦ е – эксцентриситет. Радиус-вектор Ri определяются из треугольника О1АiС, отсюда Ri O1C 2 (CAi )2 , 19 где O1C = е; CAi i R 20 e2 . 2 2 Тогда R i e i R 0 e 2 2 . Профильный угол γi Профильный угол γi зависит от поворотного угла φi и добавочного угла θi .Поворотный угол φi соответствует тому положению механизма, для которого производится расчет. i i . На участке удаления толкателя принимаем знак «+», на участке возвращения толкателя – знак «–» . Добавочный угол θi определяется по зависимости R i2 R 20 i2 i arccos . 2R i R 0 e Ai Ri i i i R0 A0 i C O Рис.10. К аналитическому расчету профиля нецентрального кулачкового механизма 4.2. Коромысловый кулачковый механизм (рис. 11) Для расчета параметров профиля кулачка введем следующие обозначения: ♦ Ri – искомый радиус-вектор профиля кулачка; 20 ♦ γi – искомый профильный угол; ♦ βi – перемещение толкателя из положения «0» в положение «i»; ♦ φi – поворотный угол; ♦ θ i – дополнительный угол; ♦ R0 – радиус начальной шайбы теоретического профиля; ♦ ℓ – длина толкателя-коромысла; ♦ L – межосевое расстояние; ♦ ψ – угол между нулевым положением коромысла (А0 О2) и межосевым расстоянием O1O2; ♦ β*i = βi + ψ – угол между межосевым расстоянием O1O2 и коромыслом в положениии «i» Ai l Ri i i i R0 A0 i *i O 2 L O1 Рис. 11. К аналитическому расчету профиля коромыслового кулачкового механизма Радиус-вектор Ri определяем из треугольника О1АiО2 R i L2 2 2L cos *i ; β*i = βi + ψ, где βi – известный угол поворота кулачка для рассматриваемого положения механизма. Угол ψ определяется из треугольника О1А0О2. 2 L2 R 20 arccos . 2 L Профильный угол γi определяется как сумма двух углов γi =φi ± θi. 21 Дополнительный угол θi определяется cледующим образом. Приравнивая длину хорды А0 Аi , определенную из двух треугольников, получаем R i2 R 02 4 2 sin 2 i 2 . i arccos 2R i R 0 5. ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД ОПРЕДЕЛЕНИЯ УГЛОВ ДАВЛЕНИЯ ДЛЯ РАЗЛИЧНЫХ ТИПОВ КУЛАЧКОВЫХ МЕХАНИЗМОВ При конструировании кулачковых механизмов существуют определенные ограничения по КПД и конструктивным размерам. КПД зависит, в основном, от сил трения в кинематических парах. Габариты механизма определяются радиусом начальной шайбы и длиной подшипниковой опоры (для кулачковых механизмов с поступательным движением толкателя). Как КПД, так и габариты механизма связаны с максимальными углами давления. При работе механизма движение передается от кулачка к толкателю. В высшей кинематической паре (кулак–ролик толкателя) возникает реакция R12, которая без учета сил трения направлена по нормали n-n к профилю кулачка. Разложим данную реакцию на две составляющих (рис. 12): Р – полезная составляющая преодолевает сопротивление, связанное с выполнением технологического процесса и является величиной известной; Н – вредная составляющая вызывает повышенное трение в опорах толкателя, что приводит к возможному его заклиниванию. При больших значениях вредная составляющая может привести к разрушению деталей кулачкового механизма. Угол α, заключенный между нормалью n-n к профилю кулачка и «линией действия» скорости толкателя, называется углом давления в кулачковом механизме. При проектировании кулачковых механизмов необходимо принимать меры к уменьшению составляющей Н, т. е. к минимизации значений угла α. При силовом замыкании входное звено (кулачок) является ведущим только на фазе удаления. На фазе возвращения кулачок является либо ведомым, либо ведущим в зависимости от соотношения между замыкающей силой, силой инерции и внешними факторами, действующими на кулачок. В этом случае угол давления целесообразно определять только на участке удаления. 22 При геометрическом замыкании входное звено может быть ведущим как на фазе удаления, так и на фазе возвращения. В этом случае угол давления определяется на обеих фазах. 5.1. Нецентральный кулачковый механизм (рис. 12) Для расчета угла давления необходимы следующие параметры: профиль кулачка известен; βi – перемещение толкателя из нулевого положения в положение «i»; R0 – радиус начальной шайбы теоретического профиля, мм; е () – эксцентриситет с учетом знака, мм; П´(φ)│ – первая передаточная функцию, мм. Рассмотрим случаи расчета угла давления с учетом знака «е». Случай 1. Эксцентриситет «е» > 0 (рис. 12, а) Для кулачка с известным профилем построим систему координат с началом координат в центре вращения кулачка O1. На расстоянии эксцентриситета «е» от O1 проведем линию действия толкателя. Для определения угла давления а проведем нормаль n-n через точку контакта толкателя и теоретического профиля кулачка. Далее из центра O1 проведем прямую перпендикулярно линии действия толкателя до пересечения её с нормалью n-n. Точку пересечения этих прямых обозначим «К». Точку пересечения линии действия толкателя с прямой O1K обозначим «С». В теоретическом курсе доказано, что отрезок O1K, выполненный в масштабе схемы KМ, численно равен величине первой передаточной функции П´(φ). Из треугольника АСК имеем CK tg , AC где CK O1K O1C = П´(φ) – e; AC i R 02 e2 . Теперь формула для расчета угла давления α имеет вид arctg e i R 20 e 2 . В зависимости от знака эксцентриситета «е» числитель дроби может быть разностью или суммой. Для доказательства рассмотрим случай 2. Случай 2. Эксцентриситет «е» < 0 (рис 12, б) Из треугольника АСК имеем 23 tg CK , где CK O1K O1C = П´(φ) – (–e) = П´(φ) + e; AC AC i R 02 e2 ; arctg e R 20 i e 2 . Знак "–" в числителе ставится в том случае, если точки "С" и "К" расположены по одну сторону от точки O1 (рис. 12, а). Знак "+" в числителе принимают в том случае, если точки "С" и "К" расположены по разные стороны от точки O1 (рис. 12, б). n n R12 A H H Y A Y i i 0 A0 C R K C О1 K X +e a X VA A R0 О1 P VA 0 P R12 n -e б n Рис. 12. К определению углов давления при поступательном движении толкателя 5.2. Кулачковый механизм с вращательным движением толкателя (рис. 13) Для расчета угла давления необходимы следующие параметры: профиль кулачка известен; βi – перемещение толкателя из нулевого положения в положение «i»; 24 R0 – радиус начальной шайбы теоретического профиля, мм; ℓ – длина коромысла, мм; L – межосевое расстояние, мм; П´(φ) – первая передаточная функция. n P T R A H *i A O1 O2 l C i L D K K n e Рис. 13. К определению углов давления при вращательном движении толкателя Коромысловый кулачковый механизм представлен на рис. 13. Для определения угла давления проведем нормаль n–n в точке контакта толкателя и теоретического профиля кулачка. Из точки О1 проведем прямую, перпендикулярно линии действия вектора скорости толкателя, т. е. параллельно коромыслу АО2 = l до ее пересечения с нормалью n–n. Точку пересечения этих прямых обозначим "К". Точку пересечения линии действия вектора скорости толкателя с прямой O1К обозначим "С". Из треугольника АСК имеем tg CK . AC Для определения отрезков СК и АС соединим центры вращения кулачка и толкателя и обозначим межцентровое расстояние O1O2 = L. 25 Опустим перпендикуляр из центра вращения толкателя 02 на продолжение прямой O1K и поставим точку "D". Далее запишем АС = O2D = L sin β*I; СК = O1K– O1C, где O1K = П´ ℓ; O1C = L cos βi* – ℓ= ẽ. β*i – угол между коромыслом и прямой, соединяющей центры O1 и О2, определяется как сумма β*i = βi + ψ. Угол ψ определяется из треугольника О1А0О2 . Для коромыслового кулачкового механизма отрезок O1C является переменным эксцентриситетом ẽ, который может принимать как положительное, так и отрицательное значение, т. е. находиться слева или справа от точки O1 СК = O1K– O1C= П´ ℓ–ẽ. С учетом полученных выражений и последующих подстановок имеем расчетную формулу для определения угла давления «α» arctg Lcos *i Lsin *i arctg e . Lsin *i При ẽ >0 в числителе будет разность, при ẽ < 0 – сумма. e arctg . Lsin *i По сути дела, знак "+" в числителе принимают в том случае, если точки "С" и "К" расположены по разные стороны от точки O1, а знак "–" в числителе – в том случае, если точки С и К расположены по одну сторону от точки O1. На практике для кулачкового механизма с поступательным движением толкателя допускаемое значение угла давления [α] = 30 ÷ 400, так как потери на трение в поступательной паре достаточно велики. Для коромыслового кулачкового механизма потери на трение во вращательных парах значительно меньше, поэтому [α] = 45 ÷ 500. Следует заметить, что допускаемые углы давления можно повысить если подобрать для кинематических пар материалы, дающие меньший коэффициент трения. 26 6. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ РАЗМЕРОВ КУЛАЧКА ИЗ УСЛОВИЙ ОГРАНИЧЕНИЙ УГЛА ДАВЛЕНИЯ При проектировании нового механизма и выборе его габаритных размеров необходимо учитывать допускаемые углы давления. При исследовании работы существующего механизма необходимо определить максимальные значения углов давления и сравнить их с допускаемыми углами давления. 6.1. Кулачковый механизм с поступательным движением толкателя (рис. 15) Случай 1. Определение минимального радиуса начальной шайбы R0 min и эксцентриситета «е» при известных допускаемых значений углов давления [α]. Подлежат определению: ■ R0 – радиус начальной шайбы теоретического профиля; ■ е – эксцентриситет. Для выполнения расчета необходимо иметь: ▼ βІІІ – максимальное перемещение толкателя; ▼ – график перемещения центра ролика толкателя; ▼ П´(φ) – график первой передаточной функции; ▼ [α]. – допускаемые углы давления; ▼ Км – масштаб схемы механизма. Пусть для данного механизма в результате кинематического анализа построены графики и П´(φ) для шести положений (рис. 14). На траектории центра ролика толкателя отложим максимальное перемещение βІІІ в масштабе Км и согласно графику нанесем на нем точки 0, 1. 2, 3, 4, 5, 6 От данных точек, перпендикулярно к траектории центра ролика отложим отрезки hi, представляющие собой значения функции П´(φ) в масштабе Км. h1 1 ; h2 2 ;.... h 5 5 . KM KM KM Отрезки hi откладываются согласно правилу. На фазе удаления и возвращения толкателя отрезки hi должны быть повернуты по отношению к вектору скорости толкателя на 900 в сторону угловой скорости кулачка ωк. Соединим концы отрезков hi плавной кривой в замкнутую фигуру. Проведем к этой кривой две касательных под углами [α] к линии действия вектора скорости толкателя для участка удаления и возвращения толкателя. Пересечение данных касательных определяет положение центра вращения кулачка О1, величину радиуса начальной шайбы теоретического профиля ку 27 лачка R0min и эксцентриситета «е» обеспечивающих работу кулачкового механизма с углами давления [α]. h П h h2 1 1 4 3 2 5 6 h4 h5 Рис. 14. График первой передаточной функции П´(φ) h h h h R max 0 min R0 O1 max факт O1 факт e Рис. 15. К определению габаритных размеров кулачкового механизма с поступательным движением толкателя 28 В данном случае получается нецентральный кулачковый механизм с эксцентриситетом «е». Чтобы получить центральный кулачковый механизм необходимо центр вращения кулачка выбрать в заштрихованной области на линии движения толкателя. При этом радиус начальной шайбы увеличивается по сравнению с предыдущим вариантом. При выборе центра вращения кулачка в заштрихованной области получим механизм для которого углы давления не превышают допускаемых значений. Cледует заметить, что максимальные углы давления не обязательно должны соответствуют масимальным значениям первой передаточной функции. Случай 2. При исследовании работы существующих механизмов может возникнуть задача определения фактических максимальных углов давления и сравнения их с допускаемыми значениями. Рассматривается случай, когда известно положение центра кулачка О1факт и необходимо определить максимальные значения углов давления αmax . Для этого из центра вращения кулачка О1факт необходимо провести касательные к замкнутой фигуре, построение которой рассмотрено выше. Затем в точках касания провести прямые параллельные линии действия толкателя. Углы образованные этими прямыми и касательными есть максимальные углы давления αmax на участках удаления и возврата толкателя. Данное построение выполнено на рис. 15 штриховой линией. 6.2. Кулачковый механизм с вращательным движением толкателя (рис. 16) При вращательном движении толкателя определяются: ■ R0– радиус начальной шайбы теоретического профиля; ■. L = O1O2 – межосевое расстояние. Для выполнения расчета необходимо иметь: ▼ βІІІ – максимальное перемещение толкателя; ▼ – график перемещения центра ролика толкателя; ▼ П´(φ) – график первой передаточной функции; ▼ ℓ – длину коромысла; ▼ [α]. – допускаемые углы давления; ▼ Км – масштаб схемы механизма. Методика расчёта такая же, как для нецентрального механизма. Для данного механизма передаточная функция является безразмерной величиной. 29 Чтобы отрезки hi имели размерность «миллиметры» необходимо значения передаточных функций умножить на длину коромысла. h1 1 ; h2 2 ;.... h 5 5 . KM KM KM Отрезки hi, откладываются на линиях толкателя с учетом правила поворота. Для схемы механизма изображенной на рис. 16 на участке удаления толкателя отрезки hi откладываются налево, на участке возвращения – направо. Если максимальные углы давления αmax фиксированы, то центр вращения кулачка О1факт находится на пересечении касательных. Тем самым факт определяется величина R0 факт и межосевое расстояние O1O2 = L . 3 V T h 2 2 h4 4 5 h5 l O2 h1 1 фа к т 0 L R 0 min O1 max L max VT фа к т R0 фа к т O1 Рис. 16. К определению габаритных размеров кулачкового механизма с вращательным движением толкателя 30 7. Выбор радиуса ролика Радиус ролика толкателя «ρ» выбирают по условию контактной прочности с учетом непрерывности контакта между роликом и кулачком, толщины ролика, механических характеристик материалов, рабочих поверхностей ролика и заданной долговечности механизма. На практике принимают ρ≤0,7 ρкр min, кр где ρ min – минимальный радиус кривизны ролика кулачка. Кромке этого, радиус ролика ограничивается условием ρ≤0,4(r0 + ρ). Практическое значение ρ выбирают меньшее из данных двух условий. Библиографический список 1. Аналитический метод кинематического расчета рычажных механизмов: метод. указания к курсовому проектированию/М. В. ПреображенскаяСПб.:СПГУТД, 2005. 2 Теория механизмов и машин/К. В.Фролов, С. П. Попов, А. К. Мусатов и др. – М.:Высшая школа,1987.-– 496 с. 3. Теория механизмов и машин/В. А. Юдин, Л. В. Петрокас.– М.:Высшая школа, 1977 – 528 с. 4. Механика машин:учеб.пособие для втузов/И. И. Вульфсон, М. Л. Ерихов, М. З. Коловский и др.– М.:Высшая школа, 1996. 5. Синтез профиля кулачка: метод. указания к курсовому проектированию/И. А. Шарапин, А. В. Орестова, Т. С. Грибкова.– СПб.:СПГУТД, 1998. 31