015532 B1 015532 B1 (11) 015532
advertisement
 015532")
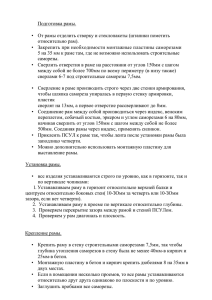
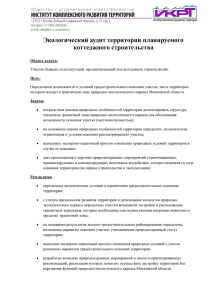
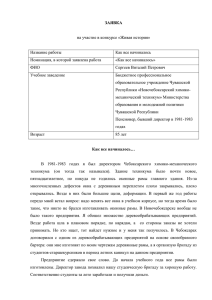
Евразийское патентное ведомство (19) (12) (45) (11) 015532 (13) B1 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ЕВРАЗИЙСКОМУ ПАТЕНТУ Дата публикации и выдачи патента (51) Int. Cl. G21C 19/19 (2006.01) 2011.08.30 (21) Номер заявки 201100214 (22) Дата подачи заявки 2011.01.31 (54) СИСТЕМА ДЛЯ ЗАЩИТЫ РАБОЧЕГО ОРГАНА ПЕРЕГРУЗОЧНОЙ МАШИНЫ ОТ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЕМ (72) Изобретатель: (74) Представитель: (57) Система для защиты от столкновения с препятствием рабочих органов перегрузочной машины при перегрузке ядерного топлива содержит датчики положения, размещенные по периферии рабочих органов. Также система содержит опорную раму, имеющую опорную поверхность и выполненную с возможностью прикрепления под перегрузочной машиной. Кроме того, система содержит подвижный каркас, содержащий верхнюю раму, размещенную с опорой на опорную поверхность опорной рамы, и нижнюю раму, соединенную с верхней рамой, так что подвижный каркас охватывает рабочие органы перегрузочной машины. К опорной раме прикреплены концевые выключатели, формирующие сигнал для останова перегрузочной машины при смещении подвижного каркаса, размещенного на опорной раме. Датчики положения формируют сигнал для замедления перемещения перегрузочной машины при приближении её рабочих органов к препятствию на расстояние, уступающее заданному расстоянию, и размещены по периферии рабочих органов на некотором расстоянии от них в радиальном направлении. Повышенная надежность срабатывания системы и защита рабочего органа достигается благодаря использованию двух различных каналов подачи сигнала управления, основанных на различных физических принципах, для уменьшения скорости перемещения перегрузочной машины и её останова, соответственно. Николаев Вячеслав Викторович, Дунаев Вадим Игоревич, Федосовский Михаил Евгеньевич, Иголкин Виталий Алексеевич (RU) Нилова М.И. (RU) B1 015532 (56) RU-U1-29397 RU-C2-2308776 ЕР-A1-0743652 US-A-3945514 015532 B1 (43) 2011.08.30 (96) 2011000003 (RU) 2011.01.31 (71)(73) Заявитель и патентовладелец: ЗАО "ДИАКОНТ" (RU) 015532 Область техники Настоящее изобретение относится к области ядерной энергетики и в особенности к системе для защиты от столкновения с препятствием рабочего органа перегрузочной машины, такого как рабочая или телевизионная штанга, для перегрузки ядерного топлива. Вместе с тем, раскрытый изобретением принцип может быть применен в других отраслях промышленности для предотвращения столкновения рабочего органа с препятствием. Уровень техники Эксплуатация ядерного реактора требует особых мер, обеспечивающих безопасность работ по перегрузке ядерного топлива. Перегрузка ядерного топлива осуществляется с помощью перегрузочной машины и включает комплекс работ по извлечению и перемещению по меньшей мере одной тепловыделяющей сборки с целью её замены или перестановки в ядерном реакторе. Перегрузочная машина выполнена в виде робота-манипулятора с программным управлением, работающего непосредственно с пола реакторного зала и оснащенного рабочей и телевизионной штангой. Собственно перегрузка тепловыделяющей сборки осуществляется рабочей штангой. Весь процесс перегрузки контролируется оператором через монитор с помощью специальной телевизионной системы, снабженной телевизионной штангой, размещенной возле рабочей штанги. При перемещении рабочей или телевизионной штанги возможны её столкновения с препятствием, таким как стенка бассейна выдержки или шахты реактора. Для исключения таких столкновений может быть использовано известное из RU 29397 (23.12.2002) устройство для контроля положения перегрузочной машины ядерного реактора, содержащее ультразвуковые датчики положения, размещенные по периферии рабочих органов. Недостатком известного решения, применяемого с целью защиты от столкновения с препятствием рабочих органов перегрузочной машины для перегрузки ядерного топлива, является отсутствие возможности уменьшения скорости перемещения рабочего органа при его приближении к препятствию. Отсутствие такой возможности приводит к увеличению риска опасного столкновения рабочего органа с препятствием и приводит к резким изменениям нагрузок на привод перегрузочной машины. Раскрытие изобретения Задачей настоящего изобретения является обеспечение защиты рабочих органов перегрузочной машины для перегрузки ядерного топлива от столкновения с препятствием, таким как стенка бассейна выдержки или шахты реактора. В предпочтительном варианте реализации изобретения предлагаемая система для защиты от столкновения с препятствием рабочих органов перегрузочной машины для перегрузки ядерного топлива содержит датчики положения, размещенные по периферии рабочих органов. При этом предлагаемая система содержит опорную раму, имеющую опорную поверхность и выполненную с возможностью прикрепления под перегрузочной машиной. Кроме того, предлагаемая система содержит подвижный каркас, содержащий верхнюю раму, размещенную с опорой на опорную поверхность опорной рамы, и нижнюю раму, соединенную с верхней рамой, так что подвижный каркас охватывает собой рабочие органы перегрузочной машины. К опорной раме прикреплены концевые выключатели, выполненные с возможностью формирования сигнала для останова перегрузочной машины при смещении подвижного каркаса, размещенного на опорной раме. Датчики положения размещены по периферии рабочих органов на некотором расстоянии от них в радиальном направлении. В одном варианте реализации изобретения сигнал от датчика для замедления перемещения перегрузочной машины при приближении её рабочих органов к препятствию на расстояние, уступающее заданному расстоянию, автоматически передается в автоматизированную систему управления перегрузочной машины. В альтернативном варианте реализации изобретения такой сигнал от датчика является информационным, например световым или звуковым, для оператора, управляющего работой перегрузочной машины. Благодаря такой конструкции для защиты от столкновения с препятствием рабочего органа перегрузочной машины для перегрузки ядерного топлива используются два различных канала для подачи сигнала управления, основанных на различных физических принципах соответственно для уменьшения скорости перемещения перегрузочной машины до минимальной при приближении рабочего органа к препятствию и останова перегрузочной машины. Датчики положения распределены по наружной периферии опорной рамы равномерно и используются для создания сплошной или дискретной круговой зоны чувствительности вокруг рабочих органов. Посторонний предмет, оказавшийся в зоне распространения ультразвукового сигнала, создает отраженный сигнал, улавливаемый этим или другим ультразвуковым датчиком, который в этом случае выдает соответствующий сигнал для уменьшения скорости перемещения перегрузочной машины. Каждый датчик положения закреплен на опорной раме посредством соответствующего ему кронштейна с возможностью перемещения в радиальном направлении. Благодаря этому обеспечивается возможность регулирования охвата круговой зоны чувствительности вокруг рабочего органа. В предпочтительном варианте реализации изобретения датчики положения выполнены в виде комбинированных излучателя и приемника ультразвуковых сигналов. Датчики положения размещены так, что излучаемый ими ультразвуковой сигнал сначала распространяется наружу параллельно плоскости -1- 015532 опорной рамы, а затем отражается вниз отражателем, закрепленным на указанном кронштейне и проходящим вниз под углом 45°. Кронштейн и отражатель жестко скреплены друг с другом или выполнены заодно. Внутренняя часть опорной рамы выполнена с наружным коническим пояском, взаимодействующим с ответным пояском верхней рамы подвижного каркаса для обеспечения центрирования подвижного каркаса. В предпочтительном варианте реализации изобретения опорная поверхность опорной рамы размещена параллельно нижней плоскости поворотной площадки перегрузочной машины для перегрузки ядерного топлива. Концевые выключатели прикреплены к опорной раме снизу, так что их размыкающие толкатели проходят сквозь отверстия в опорной раме и упираются в нижнюю плоскость верхней рамы подвижного каркаса, размещенной на опорной раме. В предпочтительном варианте реализации изобретения нижняя рама подвижного каркаса соединена с верхней рамой стойками. Каждая стойка содержит косынку усиления, выполненную в виде прямоугольного треугольника, в котором один катет, например длинный, жестко соединен с наружной стороной стойки, а другой катет, например короткий, жестко соединен с нижней стороной верхней рамы подвижного каркаса. Косынки служат для придания дополнительной жесткости всему подвижному каркасу и стойкам в частности, а также для задания определенного положения подвижного каркаса относительно опорной рамы в рабочем положении путем взаимодействия с ответными им вырезами на внутренней части опорной рамы. Кроме того, косынки задают направление смещения подвижного каркаса относительно опорной рамы при динамическом взаимодействии подвижного каркаса с препятствием, например, таким как стенка бассейна выдержки или шахты реактора, и исключают скидывание, проворот или зависание подвижного каркаса. В предпочтительном варианте реализации изобретения форма верхней рамы подвижного каркаса подобна форме опорной рамы подвижного каркаса. Нижняя рама подвижного каркаса размещена параллельно его верхней раме. В одном варианте реализации изобретения площадь, охватываемая нижней рамой подвижного каркаса, отличается от площади, охватываемой верхней рамой подвижного каркаса, например, превосходит эту площадь, так что подвижный каркас имеет форму усеченного конуса, расширяющегося вниз. Такая конструкция подвижного каркаса обеспечивает более раннее срабатывание какого-либо из концевых выключателей при недопустимом сближении рабочих органов перегрузочной машины с препятствием. Краткое описание чертежей Предлагаемая система, поясняется чертежами, на которых на фиг. 1 показано сверху перспективное изображение одного варианта реализации предлагаемой системы; на фиг. 2 - снизу перспективное изображение опорной рамы; на фиг. 3 - сверху перспективное изображение подвижного каркаса; на фиг. 4 - сбоку предлагаемая система, прикрепленная к поворотной площадке перегрузочной машины, с работающими ультразвуковыми датчиками положения; на фиг. 5 - сбоку предлагаемая система в момент остановки перегрузочной машины при касании нижнего кольца подвижного каркаса со стенкой бассейна выдержки. Осуществление изобретения Как показано на фиг. 1, предлагаемая система для защиты от столкновения с препятствием рабочих органов перегрузочной машины содержит опорную раму 1, имеющую опорную поверхность, на которую опирается подвижный каркас 2. На фиг. 3 показано, что подвижный каркас 2 конструктивно представляет собой цилиндрическую клетку, состоящую из верхней рамы 7 и нижней рамы 8, жестко соединенных между собой стойками 9. Рамы 7 и 8 выполнены в виде плоских колец. Верхняя рама 7 выполнена с возможностью укладки на опорную поверхность опорной рамы 1 (фиг. 1), так что подвижный каркас 2 охватывает рабочие органы перегрузочной машины. В рабочем положении опорная рама 1 прикреплена под перегрузочной машиной, как показано на фиг. 4, к нижней плоскости её поворотной площадки восемью шпильками 3, так что опорная поверхность опорной рамы 1 проходит параллельно нижней плоскости поворотной площадки перегрузочной машины. Как показано на фиг. 5, в рабочем положении опорная рама 1 расположена выше уровня пола реакторного зала настолько, что не может быть повреждена выступающими над полом элементами отбортовки периметра зоны обслуживания при сближении рабочих органов со стенками 10 бассейна выдержки или шахты реактора. Как показано на фиг. 2, по наружной периферии предлагаемой системы равномерно распределены восемь ультразвуковых датчиков 6, служащих для формирования сигнала для замедления перемещения перегрузочной машины при приближении её рабочих органов к стенке 10 бассейна на расстояние, уступающее заданному расстоянию. Каждый датчик 6 закреплен на опорной раме 1 посредством соответствующего ему кронштейна с возможностью перемещения в радиальном направлении. Датчики 6 выполнены в виде комбинированных излучателя и приемника ультразвуковых сигналов. -2- 015532 При приближении рабочих органов к стенке 10 бассейна выдержки или шахты реактора на определенное расстояние датчики 6 формируют сигнал, поступающий в систему управления перегрузочной машины для уменьшения скорости её перемещения до минимальной. Каждый датчик 6 размещен так, что излучаемый им ультразвуковой сигнал сначала распространяется наружу параллельно плоскости опорной рамы 1, а затем отражается вниз отражателем, выполненным на кронштейне, на котором датчик 6 закреплен. На фиг. 2 также показаны четыре концевых выключателя 4, используемых для подачи управляющего сигнала на размыкание цепи силового питания блоков управления электродвигателями и тормозными устройствами перегрузочной машины для её останова. Концевые выключатели 4, равномерно распределенные по периметру опорной рамы 1, прикреплены к ней снизу, так что их размыкающие толкатели проходят сквозь отверстия в опорной раме 1 и упираются в нижнюю плоскость верхней рамы 7 подвижного каркаса 2, размещенной на опорной раме 1. Срабатывание какого-либо из концевых выключателей 4 происходит при отводе верхней рамы 7 подвижного каркаса 2, прижимающей своим весом размыкающий толкатель соответствующего концевого выключателя 4. Опорная рама 1 выполнена из конструкционной стали в форме плоского кольца. В некоторых вариантах реализации изобретения опорная рама 1 может быть выполнена в форме другой плоской геометрической фигуры походящей формы, например овала, многоугольника или звезды. Для облегчения изготовления опорной рамы 1, её транспортировки и монтажа она выполнена из нескольких частей, скрепляемых внахлёст или по торцу походящими средствами, например накладными пластинами 5 (фиг. 2) или сваркой. Внутренняя часть опорной рамы 1 выполнена в виде профиля с опорной поверхностью и наружным коническим пояском, который служит для центрирования подвижного каркаса 2. В опорной поверхности выполнено четыре радиальных выреза (фиг. 2) для задания определенного положения подвижного каркаса 2 и предотвращения его проворачивания вокруг своей оси. Каждый концевой выключатель 4 прикреплен к опорной раме 1 при помощи соответствующей вертикальной полки, дополнительно защищающей его от возможных нежелательных механических воздействий. В рабочем положении на опорную раму 1 опирается подвижный каркас 2, который своим весом давит на её опорную поверхность и центрируется за счет наличия конического пояска. При этом верхняя рама 7 подвижного каркаса 2 удерживает нажатыми размыкающие толкатели концевых выключателей 4. Масса подвижного каркаса 2 выбирается достаточной для обеспечения удержания размыкающих толкателей 3 нажатыми и свободного сдвига подвижного каркаса 2 при его взаимодействии с препятствием, таким как стенка 10 бассейна выдержки или шахты реактора. Для облегчения изготовления рам 7, 8 подвижного каркаса 2, их транспортировки и монтажа они предпочтительно выполнены из нескольких частей, скрепляемых внахлёст или по торцу походящими средствами, например накладными пластинами 5, 12 или сваркой. Верхняя рама 7 подвижного каркаса 2 предпочтительно выполнена из конструкционной стали и имеет специальную расточку, образующую внутренний конический поясок. Указанным пояском верхняя рама 7 взаимодействует с ответным коническим пояском опорной рамы 1 для обеспечения центрирования подвижного каркаса 2. В предпочтительном варианте реализации изобретения форма верхней рамы 7 подвижного каркаса 2 подобна форме опорной рамы 1. Нижняя рама 8 подвижного каркаса 2 предпочтительно выполнена из конструкционной стали или иного упругого материала и предназначена для взаимодействия с препятствием, таким как стенка 10 бассейна выдержки или шахты реактора. В одном варианте реализации изобретения нижняя рама 8 подвижного каркаса 2 размещена параллельно верхней раме 7, а сам подвижный каркас 2 имеет форму цилиндра. Ещё в одном варианте реализации изобретения площадь, охватываемая нижней рамой 8 подвижного каркаса 2, отличается от площади, охватываемой верхней рамой 7 подвижного каркаса 2, так что подвижный каркас 2 имеет форму усеченного конуса, расширяющегося вниз. Вверху каждой стойки 9 подвижного каркаса выполнена косынка усиления, проходящая в радиальном направлении верхней рамы 7 подвижного каркаса 2. Косынка усиления выполнена в виде прямоугольного треугольника, в котором длинный катет жестко соединен с наружной стороной стойки 9, а короткий катет жестко соединен с нижней стороной верхней рамы 7 подвижного каркаса 2. При использовании предлагаемой системы с помощью датчиков 6 обеспечивается уменьшение скорости перемещения перегрузочной машины при приближении рабочих органов к стенке 10 бассейна выдержки или шахты реактора. Для останова перегрузочной машины используются концевые выключатели 4. Каждый концевой выключатель 4 установлен так, что его размыкающий толкатель проходит вертикально вверх сквозь отверстие в опорной раме 1 и прижат в рабочем положении верхней рамой 7 подвижного каркаса 2. Концевые выключатели 4 настроены так, что отклонение верхней рамы 7 подвижного каркаса 2 на определенный угол в любую сторону, соответствующее смещению нижней рамы 8 подвижного каркаса 2 на 5 мм, приведет к высвобождению размыкающего толкателя по меньшей мере одного из концевых выключателей 4. При динамическом взаимодействии нижней рамы 8 подвижного каркаса 2 с препятствием 10 происходит смещение подвижного каркаса 2, вызывающее срабатывание по меньшей мере одного из конце-3- 015532 вых выключателей 4 и формирования сигнала на останов перегрузочной машины. Для отвода перегрузочной машины от препятствия 10 используется ручной привод или специальный режим системы управления, при котором деблокируется устройство управления электродвигателем, а привод может работать только на минимальной скорости. При отводе перегрузочной машины от препятствия 10 подвижный каркас 2 под действием собственного веса возвращается в исходное положение и прижимает размыкающий толкатель сработавшего концевого выключателя 4. Таким образом, в предлагаемой системе защиты рабочих органов перегрузочной машины для перегрузки ядерного топлива от столкновения с препятствием обеспечивается уменьшение скорости перемещения рабочего органа при его приближении к препятствию, позволяющее уменьшить риск опасного столкновения рабочего органа с препятствием и избежать резких изменений нагрузок на привод перегрузочной машины. Также обеспечивается возможность останова рабочего органа при его приближении к препятствию на минимальное допустимое расстояние. Повышенная надежность срабатывания предлагаемой системы и защиты рабочего органа перегрузочной машины от столкновения с препятствием достигается благодаря использованию двух различных каналов подачи сигнала управления, основанных на различных физических принципах, для уменьшения скорости перемещения перегрузочной машины и её останова, соответственно. При использовании описанной системы в условиях, в которых не требуется повышенная надежность её срабатывания, для обеспечения уменьшения скорости перемещения перегрузочной машины и её останова может использоваться только один канал подачи сигнала управления, основанный на использовании ультразвуковых датчиков или концевых выключателей. В таком случае предлагаемая система может быть реализована без подвижного каркаса или кронштейнов, соответственно. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система для защиты от столкновения с препятствием рабочих органов перегрузочной машины для перегрузки ядерного топлива, содержащая датчики (6) положения, размещенные по периферии рабочих органов, отличающаяся тем, что она содержит опорную раму (1), имеющую опорную поверхность и выполненную с возможностью прикрепления под перегрузочной машиной, подвижный каркас (2), содержащий верхнюю раму (7), размещенную с опорой на опорную поверхность опорной рамы (1), и нижнюю раму (8), соединенную с верхней рамой (7), так что подвижный каркас (2) охватывает собой рабочие органы перегрузочной машины, и концевые выключатели (4), прикрепленные к опорной раме (1) и выполненные с возможностью формирования сигнала для останова перегрузочной машины при смещении подвижного каркаса (2), размещенного на опорной раме (1), причем датчики (6) положения размещены на некотором расстоянии от рабочих органов в радиальном направлении. 2. Система по п.1, отличающаяся тем, что датчики (6) положения распределены по наружной периферии опорной рамы (1) равномерно. 3. Система по п.1, отличающаяся тем, что каждый датчик положения закреплен на опорной раме (1) посредством соответствующего ему кронштейна с возможностью перемещения в радиальном направлении. 4. Система по п.1, отличающаяся тем, что датчики (6) положения выполнены в виде комбинированных излучателя и приемника ультразвуковых сигналов. 5. Система по п.1, отличающаяся тем, что датчики (6) положения размещены так, что излучаемый ими ультразвуковой сигнал сначала распространяется наружу параллельно плоскости опорной рамы (1), а затем отражается вниз отражателем, закрепленным на указанном кронштейне. 6. Система по п.1, отличающаяся тем, что кронштейн и отражатель выполнены заодно. 7. Система по п.1, отличающаяся тем, что внутренняя часть опорной рамы (1) выполнена с наружным коническим пояском. 8. Система по п.1, отличающаяся тем, что опорная поверхность опорной рамы (1) размещена параллельно нижней плоскости поворотной площадки перегрузочной машины для перегрузки ядерного топлива. 9. Система по п.1, отличающаяся тем, что концевые выключатели прикреплены к опорной раме (1) снизу, так что их размыкающие толкатели проходят сквозь отверстия в опорной раме (1) и упираются в нижнюю плоскость верхней рамы (7) подвижного каркаса (2), размещенной на опорной раме (1). 10. Система по п.1, отличающаяся тем, что нижняя рама (8) подвижного каркаса (2) соединена с верхней рамой (7) стойками (9). 11. Система по п.10, отличающаяся тем, что каждая стойка (9) содержит косынку усиления, выполненную в виде прямоугольного треугольника, в котором один катет жестко соединен с наружной стороной стойки (9), а другой катет жестко соединен с нижней стороной верхней рамы (7) подвижного каркаса (2). -4- 015532 12. Система по п.1, отличающаяся тем, что форма верхней рамы (7) подвижного каркаса (2) подобна форме опорной рамы (1). 13. Система по п.1, отличающаяся тем, что нижняя рама (8) подвижного каркаса (2) размещена параллельно его верхней раме (7). 14. Система по п.13, отличающаяся тем, что площадь, охватываемая нижней рамой (8) подвижного каркаса (2), отличается от площади, охватываемой верхней рамой (7) подвижного каркаса (2). 15. Система по п.14, отличающаяся тем, что площадь, охватываемая нижней рамой (8) подвижного каркаса (2), превосходит площадь, охватываемую верхней рамой (7) подвижного каркаса (2). Фиг. 1 Фиг. 2 -5- 015532 Фиг. 3 Фиг. 4 Фиг. 5 Евразийская патентная организация, ЕАПВ Россия, 109012, Москва, Малый Черкасский пер., 2 -6-