Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
advertisement

1
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Астраханский государственный технический университет»
На правах рукописи
РАБЕЙ ВАДИМ ВЛАДИМИРОВИЧ
«Исследование процессов наезда грузоподъёмных кранов
на тупиковые упоры»
Специальность: 05.05.04 – «Дорожные, строительные и подъемно-транспортные
машины»
Диссертация на соискание учёной степени
кандидата технических наук
Научный руководитель:
доктор технических наук,
профессор,
почётный работник высшего
профессионального образования РФ
Н.Н. Панасенко
Астрахань - 2014
2
ОГЛАВЛЕНИЕ
Введение.............................................................................................................................6
Глава 1. Анализ состояния проблемы и
обоснование задач диссертационного исследования..................................................13
1.1. Расчетные модели кранов с 2-мя
степенями свободы в задачах их наезда на тупиковые упоры ..................................13
1.2. Расчетные модели кранов с несколькими
степенями свободы в задачах их наезда на тупиковые упоры ..................................19
1.3. Расчетные модели кранов на основе
численных методов анализа со многими степенями свободы
в задачах их наезда на тупиковые упоры .................................................................... 33
1.4. Расчеты крановых буферных устройств и определение ударных
нагрузок при наезде грузоподъемных кранов на тупиковые упоры ........................34
1.4.1. Обзор и анализ отечественных научных работ и стандартов ..........................34
1.4.2. Обзор и анализ зарубежных научных работ и стандартов...............................40
1.5. Постановка задачи диссертационного исследования ..........................................50
1.6. Выводы к главе 1.....................................................................................................50
Глава 2. Методика построения расчетных моделей
грузоподъемных кранов ................................................................................................54
2.1. Основные положения конечно-элементной теории сооружений…………. .....54
2.2. Особенности конечно-элементного моделирования
грузоподъёмных кранов .................................................................................................58
2.3. Основные положения дискретизации континуальных систем ...........................60
2.4. Разработка конечно-элементных расчетных моделей
грузоподъемных кранов .................................................................................................62
2.4.1. Кратко об объектах моделирования ...................................................................62
2.4.2. Разработка расчетной модели мостового крана ................................................64
2.4.3. Разработка расчетной модели портального крана ............................................78
2.4.4. Разработка расчетной модели башенного крана .............................................94
3
2.5. Выводы к главе 2....................................................................................................112
Глава 3. Численное исследование динамических процессов
наезда грузоподъемных кранов на тупиковые упоры ..............................................114
3.1. Расчетный динамический анализ процесса взаимодействия
мостовых кранов с ударными тупиковыми упорами..............................................114
3.1.1. Определение НДС металлоконструкций мостовых кранов
в процессе их наезда на тупиковые упоры................................................................ 114
3.1.2. Расчет резиновых буферов мостовых кранов
методом вычислительного эксперимента ..................................................................129
3.2. Расчетный динамический анализ процесса взаимодействия
портальных кранов с ударными тупиковыми упорами ............................................144
3.2.1. Общие положения ...............................................................................................144
3.2.2. Расчет резиновых буферов портальных кранов
методом вычислительного эксперимента ..................................................................144
3.3. Расчетный динамический анализ процесса наезда
башенных кранов на безударные тупиковые упоры.................................................154
3.4. Сравнительный анализ влияния столкновения кранов с
тупиковыми упорами на параметры НДС их металлоконструкций .......................168
3.4.1. Общие положения ...............................................................................................168
3.4.2. Расчетный анализ НДС металлоконструкций грузоподъёмных
кранов на сочетания эксплуатационных нагрузок ...................................................169
3.4.3. Результаты расчётов НДС металлоконструкций
грузоподъёмных кранов ...............................................................................................172
3.5. Выводы к главе 3....................................................................................................184
Глава 4. Экспериментальное исследование динамических
процессов при наезде грузоподъёмных кранов на ударные
и безударные тупиковые упоры ..................................................................................187
4.1. Экспериментальное исследование механических свойств
буфера БР-200................................................................................................................187
4.1.1. Модель Муни – Ривлина несжимаемого материала резины..........................187
4
4.2. Экспериментальное исследование наезда мостового крана
на ударные тупиковые упоры ......................................................................................195
4.3. Экспериментальное исследование наезда башенного крана
на безударные тупиковые упоры ..............................................................................199
4.4. Выводы к главе 4...................................................................................................203
Заключение ....................................................................................................................206
Список литературы .......................................................................................................210
Приложения ...................................................................................................................220
5
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
БР – буфер резиновый;
г/п – грузоподъемный (кран);
КБС - канатно-блочная система;
КРП – крановый рельсовый путь;
КЭ – конечный элемент;
м/к – металлоконструкция;
МИВС – механизм изменения вылета стрелы;
МКЭ – метод конечных элементов;
МПК – механизм передвижения крана;
МСК – местная система координат;
НДС – напряжённо-деформированное состояние;
НПВ – неподвижный противовес;
ОПО – опасный производственный объект;
ОПУ – опорно-поворотное устройство;
ОСК – общая система координат;
ППВ – подвижный противовес;
ПУГ – противоугонное средство;
РМ – расчётная модель;
ТУП – тупиковые упоры;
ШССС – шарнирно - сочленённая стреловая система.
6
Введение
Актуальность работы. Наезд грузоподъемных кранов на тупиковые упоры
(ТУП) является аварийной ситуацией которая возникает, как правило, по причине:
1) отказа приборов и устройств безопасности;
2) нарушения
правил
технического
регулирования
(отказа)
тормозных систем;
3) ошибок в системе «человек-машина», в частности, эксплуатация крана в
крайних границах рельсового пути.
Таким образом, можно говорить о существовании ненормированного
нагружения грузоподъемных (г/п) кранов при их наезде на ТУП, последствия
которого могут непосредственно отражаться на их безопасной эксплуатации.
Актуальность
работы
обусловлена
высокой
повреждаемостью
демпфирующих устройств (буферов), ударных и безударных ТУП, деформацией
металлоконструкций (м/к) кранов, прежде всего, общих изгибных и в местах
установки буферов (опорные пластины), что свидетельствует как о частых
наездах г/п кранов на ТУП, о существовании высоких ударных динамических
нагрузок, а также и о связи с проектными недооценками при конструировании
кранов в части учёта ударных нагрузок, возникающих в случае наезда кранов на
ТУП. Следует отметить, что, как отечественные, так и зарубежные стандарты,
нормы и правила безопасности по г/п кранам не содержат полных рекомендаций
об учете нагрузок как на грузоподъемные краны в процессе их наезда на ТУП,
так и на их поддерживающие конструкции. При этом методы расчета нагрузок
нерабочего состояния кранов, возникающих в их металлоконструкциях и
буферных устройствах в процессе наезда на ТУП, являются приближенными, не
учитывающими различные эксплуатационные состояния г/п кранов, что, в свою
очередь, приводит к недооценке реальных ударных нагрузок возникающих при
наездах г/п кранов на ТУП [1] .
Актуальность настоящей работы вытекает также из анализа научноисследовательских работ как отечественных, так и зарубежных авторов,
7
исследования которых не позволили сделать однозначный вывод о влиянии
ударного динамического нагружения на состояние и поведение м/к г/п кранов в
процессе их наезда на ТУП, что является особенно важным для тех кранов
которые исчерпали свой нормативный срок службы по РД 10-112-01-04 [2], либо
м/к
которых
подвергалась
неоднократному
ремонту
с
применением
электросварки. Вопросу пространственного поведения м/к, прежде всего
башенных кранов, при наезде на безударные ТУП, также не уделено должного
внимания.
Недостаточное изучение проблемы наезда г/п кранов на ТУП, прежде всего,
связано как с чрезмерным упрощением расчетных моделей (РМ) кранов: в
основном использовались плоские модели с 2-мя и 3-мя степенями свободы
практически не отражающие поведение действительных несущих м/к кранов, так
и с упрощением математических моделей: практически во всех научноисследовательских работах для вывода уравнений движения крана используется
уравнение Лагранжа второго рода 2-го и 3-го порядков [3].
Работа является продолжением исследований процессов наезда г/п кранов на
ударные и безударные ТУП изложенных в работах таких ученых, как Петухов
П.З., Ковальский Б.С., Комаров М.С., Казак С.А., Черкасов В.Г., Мартынов А.В.,
Дейнега В.И., Джигкаев Т.С., Поликарпов К.В., Жуков В.Г., Лобов Н.А., Нааs
Т.N. и др.
Цель работы:
Обеспечение безопасности эксплуатации грузоподъёмных кранов на
рельсовом ходу путем установления на основе численных методов анализа
влияния процесса взаимодействия кранов с ударными и безударными ТУП на
состояние их металлоконструкций, буферных устройств и ТУП.
Для достижения намеченной цели при выполнении диссертационной работы
необходимо было решить следующие задачи:
1) разработать конечно-элементные расчётные модели (РМ) г/п кранов со
многими
степенями
свободы, отражающие действительную работу м/к
мостового, портального и башенного кранов;
8
2) провести вычислительные эксперименты по наезду РМ г/п кранов на
ударные и безударные ТУП на основе численного метода конечных элементов с
учётом различных эксплуатационных состояний кранов;
3) исследовать влияние процессов наезда г/п кранов на ударные и
безударные
ТУП
на
напряжённо-деформированное
состояние
их
металлоконструкций;
4) исследовать поведение резиновых буферов в результате взаимодействия
кранов с ТУП. Определить расчетные зависимости по выбору резиновых буферов
более полно учитывающие их потребную энергоёмкость;
5)провести
экспериментальные
исследования
для
подтверждения
адекватности выполненных теоретических расчетов.
Научная новизна:
1. Исследовано пространственное поведение, в том числе напряжённодеформированное состояние (НДС), действительных м/к мостового и портального
кранов в процессе их наезда на ударные ТУП в различных эксплуатационных
состояниях. Установлено влияние различных эксплуатационных состояний г/п
кранов на результат их взаимодействия с ТУП.
2. Исследовано поведение резиновых буферов марки БР в процессе наезда
мостового и портального кранов на ударные ТУП. Показано, что даже при
соблюдении всех требований правил безопасности опасных производственных
объектов (ОПО) на которых используются подъёмные сооружения кинетическая
энергия некоторых типов кранов, воспринимаемая резиновыми буферами в
тупиковых участках пути, превышает, по крайней мере в 2 раза, энергоемкость
буферов, что на практике приводит к разрушениям буферов и оказывает
неблагоприятное влияние на м/к как г/п кранов, так и на м/к подкрановых
конструкций.
3. Предложены расчетные зависимости для выбора резиновых буферов
марки БР мостовых и портальных кранов, учитывающие действительные физикомеханические и конструкционные свойства резиновых буферов, позволяющие
более полно учесть их потребную энергоёмкость.
9
4. Исследованы характеристики устойчивости положения в пространстве и
НДС башенных кранов при наезде на безударные ТУП. Показано, что
существующие
безударные
ТУП
являются
не
достаточно
надежным
противоаварийным средством гашения остаточной скорости башенных кранов, а
также, что наезд на них с номинальной и выше скоростью не безопасен.
Установлены рабочие границы эксплуатационных состояний, обеспечивающие
безопасную работу башенных кранов вблизи безударных ТУП.
Положения, выносимые на защиту:
1.Оценка влияния эксплуатационных состояний мостовых кранов на
параметры НДС их металлоконструкций в процессе наезда на ударные ТУП на
основе МКЭ.
2.Аналитические
зависимости
по
расчету
резиновых
буферов
грузоподъёмных кранов, учитывающие действительные физико-механические и
конструкционные
свойства
буферов,
ТУП,
а
также
действительные
металлоконструкции кранов.
3.Результаты исследований методом вычислительных экспериментов на
основе МКЭ взаимодействия башенных кранов с безударными ТУП.
4.Динамические коэффициенты повышения напряжений учитывающие
нагрузки на металлоконструкции грузоподъёмных кранов возникающие по
причине их наезда на ТУП.
Теоретическая значимость работы:
1. Полученные результаты позволяют скорректировать существующие
аналитические зависимости по расчету и выбору резиновых буферов г/п кранов.
2. Предложены значения динамических коэффициентов повышения
напряжений в опасных сечениях металлоконструкций г/п кранов возникающих в
процессе их наезда на ударные и безударные ТУП.
Практическая значимость работы
Определено влияние динамических процессов взаимодействия г/п кранов с
ударными и безударными ТУП на состояние их металлоконструкций, а также на
техническое состояние буферов и амортизаторов ТУП методом вычислительных
10
экспериментов на основе МКЭ по РМ кранов, отражающих их действительные
металлоконструкции.
Результаты диссертационной работы предложены для использования при
проектировании новых конструкций г/п кранов, корректировки решений ОСТ
24.191.37-78 в части методики расчета и выбора резиновых буферов марки БР и
должны послужить основой для корректировки существующих и создания новых
стандартов и правил по г/п кранам в части установления видов предельных
состояний и их расчетных сочетаний нагрузок, а также для разработки
технического регламента по расчетному анализу динамических процессов наезда
г/п кранов на препятствия (в т.ч. столкновений кранов).
Реализация работы
Полученные в диссертационной работе результаты вычислительных и
натурных экспериментов были использованы при совершенствовании методов
экспертных обследований, в расчетах остаточных ресурсов
г/п кранов
проводившихся в экспертной организации ООО «НПП «Подъёмные сооружения»
и внедрены на ОАО «ССЗ «Красные Баррикады» и ОАО «ПСК «Строитель
Астрахани» (г. Астрахань).
Предложена практика освоения метода вычислительного эксперимента в
исследовании нелинейных процессов характерных для сложных систем г/п
кранов.
Работа выполнялась в соответствии с госбюджетными темами НИР
Астраханского
государственного
«Подъемно-транспортные
технического
машины»
на
университета
2012-2013
гг.
на
кафедре
«Расчетно-
экспериментальное исследование безопасной эксплуатации мостовых кранов при
взаимодействии
с
тупиковыми
упорами»,
«Расчетно-экспериментальное
исследование безопасной эксплуатации портальных кранов при взаимодействии с
тупиковыми упорами», «Расчетно-экспериментальное исследование и разработка
мер обеспечения безопасной эксплуатации башенных кранов при взаимодействии
с безударными тупиковыми упорами», номер государственной регистрации №
01201179194.
11
Методика разработки расчётно-динамических моделей кранов на основе
МКЭ, а также результаты вычислительных экспериментов процесса наезда кранов
на ударные и безударные ТУП используются в учебном процессе Астраханского
государственного технического университета на кафедре «Техника и технологии
наземного транспорта» при подготовке специалистов по специальности 190602.65
«Эксплуатация
перегрузочного
оборудования
портов
и
транспортных
терминалов», магистров (190100.68) и бакалавров (190100.62) по направлению
«Наземные транспортно-технологические комплексы».
Достоверность
подтверждается
и
обоснованность
адекватностью
результатов
используемых
исследования
расчетных
моделей,
современными апробированными численными методами и программными
средствами
исследований,
использованием современных
информационных
технологий и экспериментальными исследованиями процесса наезда г/п кранов
на ТУП,
подтверждающими сходимость теоретических и экспериментальных
результатов (расхождение составляет около 9 %).
Апробация работы. Основные научные результаты, изложенные в
диссертационной работе, докладывались на следующих конференциях и
семинарах: XV Московской международной межвузовской научно-технической
конференции «Подъемно-транспортные,
строительные, дорожные, путевые
машины и робототехнические комплексы» (Москва, 2011 г.), V сессии научного
совета РАН по механике деформируемого твёрдого тела (Астрахань, 2011 г.), XVI
Московской международной межвузовской научно-технической конференции
студентов,
аспирантов
и
молодых
ученых
«Подъемно-транспортные,
строительные, дорожные, путевые машины и робототехнические комплексы»
(Москва, 2012 г.), I Всероссийском конгрессе молодых учёных (Санкт-Петербург,
2012 г.), V Уральском конгрессе подъемно-транспортного оборудования
(Екатеринбург,
2012
г.),
V
Научно-технической
конференции
молодых
специалистов и работников ООО «Газпром добыча Астрахань» «Инновации
молодёжи – потенциал развития нефтегазовой отрасли» (Астрахань, 2013 г.), V
Международном научном симпозиуме «Ударно-вибрационные системы, машины
12
и технологии» (Орёл, 2013 г.), Международной научно-технической конференции
«Интерстроймех-2013» «Инновации в науке – инновации в образовании»
(Новочеркасск, 2013 г.), IV Международной научно-практической конференции
«Современное машиностроение. Наука и образование» (Санкт-Петербург, 2014
г.).
Публикации. По теме диссертации опубликовано 21 работа, из них 4 работы
опубликованы в рецензируемых научных журналах, рекомендованных Высшей
аттестационной комиссией, 3 работы опубликованы в зарубежных научных
журналах, входящих в международную базу цитирования Scopus.
Структура и объём диссертации
Диссертация изложена на 219 страницах основного текста, включая 107
рисунков и 14 таблиц, состоит из введения, четырех глав, заключения, списка
литературы, включающего 103 наименования и 2 приложений.
13
Глава 1. Анализ состояния проблемы и обоснование задач
диссертационного исследования
1.1. Расчетные модели кранов с 2-мя степенями свободы в задачах их наезда
на тупиковые упоры
В России одним из первых, кто занимался исследованием проблемы
взаимодействия грузоподъемных (г/п) кранов с тупиковыми упорами (ТУП), был
докт. техн. наук, профессор Петухов П.З. Основной целью его работы [4] стало
рассмотрение методов поглощения кинетической энергии мостового крана
(тележки) и полезного груза, перехода её в другие виды энергии. В работе [4]
указывается, что в случае наезда на жесткие упоры (при отсутствии буферных
устройств) величины замедлений мостовых кранов составляют десятки и сотни
м/с2, в то время как допускаемые величины замедлений не должны превышать 4-5
м/с2. Петухов П.З. сформулировал основные требования к крановым буферам. В
его работе также было отмечено, что «точное решение этой задачи в общем виде
для различных конструкций кранов не может быть выполнено, вследствие целого
ряда явлений, одновременно возникающих в металлоконструкции (м/к) и буферах
кранов».
В другой работе Петухова П.З. [5] получена система уравнений (1.1)
описывающая торможение г/п кранов гидравлическим буфером с постоянным
сопротивлением с учетом сопротивления передвижению и гибкого подвеса груза
для расчетной модели с 2-мя степенями свободы показанной на рис.1.1.
(mк mг )
x mгlк (cos 2 sin ) Qx x W ;
an
g
l cos l sin ,
к
к
(1.1)
где mк и m г - масса крана и груза; lк - длина подвеса груза; x- координата движения
крана; - угол отклонения груза от вертикали; Q x -горизонтальная проекция
действующих на кран сил; x - гидравлическое сопротивление буфера; W внешние силы сопротивления движению крана.
14
Рис.1.1. Расчетная модель процесса наезда крана либо
грузовой тележки на ТУП по Петухову П.З. [5]
В работе Ковальского Б.С. [6] рассмотрен случай наезда крана с гибко
подвешенным грузом на пружинный буфер (рис. 1.2). Система уравнений
движения имеет следующий вид:
m2 g
m1 x kx W m2 g tg l U ;
m2 g
m (
U,
2 x U ) m2 g tg
l
(1.2)
где m1 и m2 - масса крана и груза соответственно; x-перемещение крана; k жесткость буферных пружин; W - сила сопротивления движению крана; l -длина
подвеса груза; U - линейное перемещение подвешенного груза относительно
крана.
15
Рис.1.2. Расчетная модель наезда крана с грузом на ТУП
по Ковальскому Б.С. [6]
Комаров М.С. в работе [7] рассматривает случай наезда крана на
пружинный буфер в предположении самого худшего случая: наезда крана на упор
с наибольшей скоростью при отсутствии торможения (рис.1.3). В работе выведена
система дифференциальных уравнений движения:
d 2 s1
( s2 s1 ) m2 g
;
m1 dt 2 cs1
l
2
m d s2 m2 g ( s s ) 0,
2
1
2 dt 2
l
(1.3)
где m1 - сумма приведенных масс крана и вращающихся элементов его механизма
передвижения; m2 – масса груза; l - длина подвеса груза; s1 и s2 - координаты
положения крана и груза; с – жесткость буфера.
16
Рис.1.3. Расчетная модель наезда крана с грузом на ТУП
по Комарову М.С. [7]
Одной из первых работ посвященных гравитационному торможению кранов
стала работа Мартынова А.В. [8], в которой обоснована целесообразность и
возможность
практического
использования
гравитационного
способа
торможения, как средства, обеспечивающего безопасную работу кранов в
тупиковых участках кранового пути. В работе Мартынова А.В. также разработаны
теоретические
основы
процесса
гравитационного
торможения
кранов:
установлены зависимости характеризующие влияние исследуемых факторов
(параметров уклонов, сил сопротивлений передвижению, движущих сил,
положения центра тяжести крана, массы и длины подвеса груза на гибком
подвесе) на параметры движения кранов; получены формулы для выбора
рациональных профилей уклонов (рис.1.4 а ,б).
17
а
б
Рис.1.4. Гравитационное торможение кранов по Мартынову А.В. [8] :
а - определение критического угла наклона рельсов к горизонту αкр; б - расчетная
модель гравитационного безударного торможения крана с грузом на гибком
подвесе
Полученная Мартыновым А.В. система уравнений движения имеет вид:
tg 2
tg 2
tg
) m2
] S ( m1 m2 ) g
m2 g 0;
[m1 (1
3
4
2
l S g 0,
(1.4)
18
где m1 - приведенная масса крана; m2 и l – масса и длина подвеса груза на гибком
подвесе; - угол наклона рельсов к горизонту; - наклон крана (тележки) к
горизонту.
Для снижения динамических нагрузок, возникающих при наездах кранов на
ТУП, в работе Мартынова А.В. были применены переходные кривые. В технике
для этой цели, как правило, служат кубическая парабола, лемниската Бернулли и
клотоида (спираль Корню). В работе [8] получено уравнение переходной кривой
(рис.1.5):
hB
y В2 tg B 1
B tg 2 B
2
B tg 2 B
1
hB
1
B tg B
1 B tg B
hB
1
x
hB
1
tg 2
B
B
1
,
(1.5)
где yВ hВ , y В tg В , yВ В .
Рис.1.5. К определению уравнения переходной кривой [8]
Мартыновым А.В. также было установлено, что «рациональный профиль
уклонов для осуществления гравитационного торможения кранов должен
состоять из переходного
участка, обеспечивающего
плавное
нарастание
замедлений до заданных величин и рабочего участка, на котором реализуется
минимум тормозного пути кранов; кроме того, установлено, что геометрические
19
характеристики крана (база, положение центра тяжести) оказывают существенное
влияние
на закон его
подвешенного
груза
гравитационного
значительно
торможения,
снижает
тормозной
а наличие
путь
и
гибко
время
гравитационного торможения крана».
В заключение следует указать, что в работах [4-8]
разработаны
теоретические основы процесса безударного (гравитационного) и ударного
торможения кранов, получены первые системы уравнений движения кранов при
наезде на ТУП. При этом были сформулированы основные требования к
крановым буферам и определены величины замедлений кранов в процессе их
наезда на ТУП.
Однако, упрощения РМ кранов с 2-мя степенями свободы [4-8] не
позволили определить полный характер процесса ударного нагружения буферов
во времени, а также действительную работу металлоконструкций кранов при их
наезде на ТУП.
1.2. Расчетные модели кранов с несколькими степенями свободы в задачах
их наезда на тупиковые упоры
В работе Казака С.А. [9] рассматривается соударение крана мостового типа
с упругими ТУП, где движение крана представлено с помощью четырехмассовой
расчетной схемы с тремя упругими связями (рис.1.6). Система уравнений
движения крана до наезда на ТУП имеет следующий вид (см. рис.1.6 а):
x11 F1;
m1
m
2 x21 F21 F11 W ;
x31 F31 F21;
m3
m4
x41 F31 ,
(1.6)
где m1 - масса свободно вращающихся частей трансмиссии механизма
передвижения крана; m2 - приведенная к ходовым колесам часть массы моста; m3
- часть массы моста, приведенная к середине пролета с массой грузовой тележки;
m4 - масса груза; С1 - коэффициент жесткости свободной части трансмиссии; С2 -
20
коэффициент жесткости моста в горизонтальном направлении; С 3 - коэффициент
горизонтальной
жесткости
гибкой
подвески
груза;
С4 - коэффициент
горизонтальной жесткости буфера; W- суммарное сопротивление передвижению;
V - скорость наезда крана на ТУП. После наезда крана на ТУП система уравнений
(1.6) принимает вид (см. рис 1.6, б):
x12 F12 ;
m1
m
2 x22 F22 F12 W F42 ;
x32 F33 F22 ;
m3
m4
x42 F33.
(1.7)
а
б
Рис.1.6. Расчетная схема наезда крана с грузом на ТУП по Казаку С.А.[9]:
а – до наезда крана на ТУП; б – после наезда
21
В работе Черкасова В.Г. [10] предложена блок-схема для решения на
аналоговой вычислительной машине трех нелинейных дифференциальных
уравнений движения, полученных в результате математического описания
процесса торможения крана (тележки) пружинно-гидравлическим буфером с
учетом влияния груза на гибкой подвеске и упругости м/к крана, не имеющих
аналитического решения (рис.1.7):
(m1 m3 )
x1 c1 ( x1 x2 ) m3l ( cos 2 sin ) cг x 2 signx1 Wsignx1;
x2 c1 ( x 1 x2 ) c2 x2 cг x 2 signx1 Wsignx1;
m2
2
m3l m3lx1 cos m3 gl sin 0,
x
где x (x1 x2) - скорость движения штока буфера; signx1 1 .
x1
(1.8)
Рис.1.7. Расчетная модель наезда крана с грузом на ТУП
по Черкасову В.Г.[10]
В
результате
зависимости,
решения
позволяющие
уравнений
определить
(1.8)
предложены
основные
параметры
графические
пружинно-
гидравлического буфера. Помимо этого, исследования Черкасова В.Г. показали,
что при восприятии равной кинетической энергии пружинно-гидравлический
22
буфер будет создавать усилие и иметь осадку на 30%, а отдачу на 47% меньше,
чем пружинный.
В выше перечисленных работах[4-10] также отмечалось, что теоретическое
определение энергоемкости резиновых буферов затруднено, вследствие того, что
«…до настоящего времени не установлена аналитическая зависимость между
напряжением и деформацией буфера, которая получила бы всестороннюю
апробацию и признание». Эта трудность объяснялась тем, что характер кривой 4
(рис.1.8) является существенно нелинейным при относительных деформациях >
15%, кроме того нелинейность в значительной степени зависит от ряда факторов,
прежде всего таких, как фактор формы, размеров, способа закрепления торцов,
температуры окружающей среды, скорости приложения нагрузки, отклонение
физико-химических свойств резины от номинальных значений из-за сложности
технологического процесса и др.
Рис.1.8. Характеристики различных типов буферов (зависимость
создаваемой силы сопротивления буфером (P) от его осадки (V)): 1гидравлического; 2 – пружинно-фрикционного; 3 - с предварительно поджатой
пружиной; 4 – резинового [4-10]
23
В результате теоретических исследований Дейнеги В.И. [11] фрикционногравитационных тормозных устройств, в отличие от (1.5), было определено
уравнение рационального профиля направляющей (рис.1.9):
x3
1 1
1 7
y
x ,
2
6 a 112 a a 15a
(1.9)
где a = R S; a -параметр кривой; S - длина дуги спирали Корню; R - радиус
кривизны спирали Корню.
Рис.1.9. Графики профилей направляющих тормозного пути [11]
В работе Дейнеги В.И. также была рассмотрена динамика фрикционногравитационного торможения, из которой были определены величины опорных
реакций в осях опор и ходовых колёс и ускорение замедления крана. Система
уравнений движения крана записывалась следующим образом:
mx RВ sin 0;
my mg RA RB cos 0;
J RB 0,5b cos( ) RA 0,5b cos 0,
(1.10)
где m и J - соответственно, приведенная масса и полярный момент инерции крана
относительно центра тяжести; RA и RB - реакции на оси колес или роликоопор
крана (тележки); - угол наклона касательной профиля направляющей в точке
24
касания роликоопор или колеса крана; x и y – координаты центра масс; S –
перемещение заднего колеса; b – база крана.
Джигкаевым Т.С.
[12] была получена система дифференциальных
уравнений описывающая динамические процессы при наезде тележки (крана) на
ТУП (рис 1.10), как без учета (1.11), так и с учетом демпфирования (1.12) в
металлической конструкции мостового перегружателя:
d 2 x1
dx1 dx2
(m0 m1 ) dt 2 coj ( dt dt ) c1 j ( x1 x2 )
dx1 dx2
c3 ( x3 x1 ) Fj sign( dt dt )W R1 j 0;
2
m d x2 c x c ( x x ) sign( dx1 dx2 )W 0;
2 2
1j
1
2
c
2 dt 2
dt
dt
2
m d x3 c ( x x ) 0;
3
3
1
3 dt 2
m0 m1
x1 C0 j x1 1 ( x1 x2 ) C1 j ( x1 x2 )
C3 ( x3 x1 ) R11 W F1 j 0;
x2 2 x2 C2 x2 C1 j ( x1 x2 ) WC 0;
m2
m
3 x3 C3 ( x3 x1 ) 0,
(1.11)
(1.12)
где m0 - приведенная масса вращающихся частей; m1 - приведенная масса тележки
(крана); m 2 , m3 - соответственно приведенные массы крана и груза; x0 , x1 , x2 , x3 соответственно перемещение вращающихся частей, перемещение тележки,
продольное смещение моста и горизонтальное перемещение груза на гибком
подвесе за время t от момента соприкосновения тележки с упором буфера до
полной остановки тележки; W - суммарная сила сопротивления передвижению;
W C - окружное усилие, которое реализуется трением между ходовыми колесами и
рельсами;
R
- усилие буфера; R1 j -усилие предварительного поджатия буфера; C1 j -
жесткость буфера; j - коэффициент демпфирования. В (1.11) и (1.12) величина
C1 j - представляет собой жесткость всех буферов, участвующих в поглощении
энергии движения крана.
25
Рис.1.10. Расчетная модель наезда грузовой тележки козлового крана на
ТУП по Джигкаеву Т.С. [12]: 1-тележка, 2-мост, 3-подвешенный полезный груз,
4-буферное устройство
В работе Поликарпова К.В. [13] для определения динамических нагрузок,
действующих на м/к мостового крана с жестким подвесом груза при наезде на
ТУП, использовалась динамическая модель представленная на рис. 1.11. Система
дифференциальных уравнений движения приведенных масс в работе [13] в случае
расположения грузовой тележки по середине пролета моста имела вид (1.13).
Рис.1.11. Расчетная модель наезда мостового крана на ТУП
по Поликарпову К.В. [13]
26
x1 ( m1u1 1 x1 )1,1 ( m2u3 3 x3 )1,3 ( m3u5 5 x5 )1,5 ( m4u7 7 x7 )1,7
1
(m6u11 11 x11 )1,11 (T2 W2 Fб )1,1;
m3* mпр
m2
y m1
y
y
y
y
y
y
2
2 2 2,2
4
4 4 2,4
6
6 6 2,6
2
2
2
2
m4
m
y8 8 y 8 2,8 5
y10 10 y10 2,10 (m6u11 11 y11 ) 2,11;
2
2
x3 (m1u1 1 x1 ) 3,1 ( m2u3 3 x3 ) 3,3 (m3u5 5 x5 ) 3,5 ( m4u7 7 x7 ) 3,7
1
(m6u11 11 x11 ) 3,11 (T2 W2 Fб ) 3,1 ;
m3* mпр
m2
y m1
y2 2 y 2 4,2
y4 4 y 4 4,4
y6 6 y 6 4,6
4
2
2
2
m4
m
y8 8 y 8 4,8 5
y10 10 y10 4,10 (m6u11 11 y11 ) 4,11;
2
2
x5 ( m1u1 1 x1 ) 5,1 (m2u3 3 x3 ) 5,3 ( m3u5 5 x5 ) 5,5 ( m4u7 7 x7 ) 5,7
1
(1.13)
(m6u11 11 x11 ) 5,11 (T2 W2 Fб ) 5,1;
m3* mпр
m1
m2
y6
y2 2 y 2 6,2
y4 4 y 4 6,4
y6 6 y 6 6,6
2
2
2
m
m4
y8 8 y 8 6,8 5
y10 10 y10 6,10 ( m6u11 11 y11 ) 6,11;
2
2
x7 ( m1u1 1 x1 ) 7,1 ( m2u3 3 x3 ) 7,3 ( m3u5 5 x5 ) 7,5 ( m4u7 7 x7 ) 7,7
1
(m6u11 11 x11 ) 7,11 (T2 W2 Fб ) 7,1;
m3* mпр
m
m
1
2
y8
y2 2 y 2 8,2
y4 4 y 4 8,4
y6 6 y 6 8,6
2
2
2
m5
m4
y
y
y10 10 y10 8,10 ( m6u11 11 y11 ) 8,11;
8
8
8
8,8
2
2
1
2
m1u1 m2u3 m3u5 m4u7 m5u9 m6u11 T1 T2 W1 W2 Fб Fб ;
m3* mпр
m2
y m1
y
y
y
y
y
y
2 2 10,2
4
4 4 10,4
6
6 6
2
10
10,6
2
2
2
m4
m
y8 8 y 8 10,8 5
y10 10 y10 10,10 ( m6u11 11 y11 )10,11 ;
2
2
x11 ( m6u11 11 x11 )11,11 ,
27
где i , j - податливость м/к крана в направлении i-ого перемещения при действии
единичной силы, приложенной в j-ом направлении (i - 1,2…11; j – 1,2…11); T1 и T2
- усилия создаваемые тормозами механизмов передвижения крана; W1 и W2 силы сопротивления передвижению крана; i - коэффициенты; определяющие
затухание
колебаний
за
счет
внутреннего
трения
и
конструкционного
*
демпфирования; m2 - приведенная масса средней части главных балок (1/4 от их
массы); mпр - приведенная к середине пролета масса определяющаяся из условия
равенства кинетических энергий вращательного движения рамы грузовой тележки
с механизмами и поступательного движения приведенных масс в направлении y 6 .
Грузовая тележка (см. рис.1.11) располагалась в середине или четверти
пролета моста крана. Приведенные массы динамической модели имели шесть
горизонтальных
( x1 , x3 , x5 , x7 , u9 , x11 )
и
пять
вертикальных
перемещений
( y 2 , y 4 , y 6 , y 8 , y10 ). Перемещение массы m6 зависело от положения грузовой
тележки.
Также в работе [13]
был разработан метод определения динамических
нагрузок, возникающих при наезде нижнего конца жесткого подвеса груза на
жёсткий упор (стенку колодца, штабель слитков и т.п.), с учетом возможности
отрыва ходовых колес грузовой тележки от рельса. Для описания динамики
взаимодействия крана с жестким упором до и после опрокидывания грузовой
тележки использовалась упрощенная динамическая модель с жестким подвесом
груза в середине пролета (рис.1.12).
В
случае
учета
опрокидывания
грузовой
тележки
дифференциальных уравнений движения (1.13) принимала вид (1.14).
система
28
а
б
Рис.1.12. Расчетная модель наезда мостового крана на жёсткий упор при
опрокидывании грузовой тележки: а - общий вид модели крана; б- расчетная
схема опрокидывания грузовой тележки [13]
m1u1 m 2L u3L m 2R u3R m p up x m ш uш x m к uк x m 3u5
P1 ( u5 ) P2 (u1 ) W1 W 2 R11 0;
x ( m u x ) ( m L uL L x L )
1 1
1 1
1,1
2 3
3 3
1,3 L [ P2 ( u1 ) W 2 ] 1,1
1
( m R uR R x R m u m u m u R ) ;
p px
ш шx
к кx
2 3
3 3
11
1,3 R
x3R ( m1u1 1 x1 ) 3 R ,1 ( m 2L u3L 3L x 3L ) 3 R ,3 L [ P2 (u1 ) W 2 ] 3 R ,1
( m 2R u3R 3R x 3R m p up x m ш uш x m к uк x R11 ) 3 R ,3 R ;
L
L L
L L
x3 ( m1u1 1 x1 ) 3 L ,1 ( m 2 u3 3 x3 ) 3 L ,3 L [ P2 ( u1 ) W 2 ] 3 L ,1
( m R uR R x R m u m u m u R )
2 3
3 3
p px
ш шx
к кx
11
3 L ,3 R ;
R
R R
L L
L L
y R ( m R
4
2 y 4 4 y 4 m p u p y m ш u ш y m к u к y ) 4 R ,4 R ( m 2 y 4 4 y 4 ) 4 R ,4 L ;
y 4L ( m 2R
y 4R 4R y 4R m p up y m ш uш y m к uк y ) 4 L ,4 R ( m 2L
y 4L 4L y 4L ) 4 L , 4 L ;
K
K
K
I T m p g cos m ш g ( H ш sin cos ) m к g ( H к sin cos )
2
2
2
R ( H cos K sin ),
11
2
(1.14)
29
где m p , m ш , m к - массы рамы грузовой тележки, шахты и колонны; P1 и P2 движущие силы, создаваемые электродвигателями, расположенными на концевых
балках; IТ - момент инерции грузовой тележки (рамы, шахты и колонны) при
повороте ее относительно рельса правой главной балки; upx , uш x , uкx , upy , uш y , uкy соответственно горизонтальные и вертикальные проекции полных ускорений
рамы грузовой тележки, шахты и колонны.
В работе Жукова В.Г. [14]
разработаны два комбинированных ТУП –
ударный ТУП СК 2.02, останавливающий кран за счет создания при наезде сил
трения между упором и рельсом и ТУП УТК-1, исключающий возможность
переезда ходовых колес крана через безударный тупиковый упор. В результате
были созданы математические модели наезда башенных кранов с грузом на
гибком подвесе на данные ТУП, позволившие выбрать их рациональные
конструктивные параметры, определяемые динамикой процесса наезда (рис 1.13 1.14).
Рис.1.13. Расчетная модель наезда крана с грузом на ТУП СК 2.02
по Жукову В.Г. [14]
30
Рис.1.14. Расчетная модель наезда крана с грузом на ТУП УТК-1
по Жукову В.Г. [14]
Уравнения движения с тремя степенями свободы, описывающие процессы
наезда башенного крана на ТУП комбинированного типа, в работе Жукова В.Г.
имели вид:
а) для случая наезда крана на ТУП СК 2.02:
c
2
(
m
m
)
x
m
l
(
cos
sin
)
( S Б S Б0 )
0
1
1
SБ
( x s cos ) W ;
x cos x sin ( x g )sin 0;
l
c
m2
s m2 g sin
( S Б S Б0 )( s x cos )
SБ
F sign ( s),
ТР
(1.15)
31
1, если s 0;
где sign ( s) 0, если s 0; x - перемещение крана, - угол отклонения подвеса
1, если s 0,
груза от вертикали; s – смещение вдоль наклонной плоскости клина подвижной
части ТУП; m0 , m1 , m2 - приведенные массы, соответственно, крана, груза и
подвижной части ТУП; FТР - сила трения при перемещении подвижной части
ТУП; W – сопротивление движению крана; V C - скорость крана; c – жесткость
буфера;
S Б0
и
SБ
-
размер,
соответственно,
недеформированного
и
деформированного буфера.
б) для случая наезда крана на ТУП УТК-1:
(m0 m1 )
x (m0 SC sin( C ) m1S D sin( D )) L ( m1l cos )
(m S cos( ) m S cos( )) L 2 ( m l sin ) 2 W cu u ;
0 C
C
1 D
D
1
x
2
2
( m0 SC sin( C ) m1S D sin( D )) Lx ( J C (m0 SC m1S D ) L)
(1.16)
(
m
LS
l
sin(
))
((
m
S
cos(
)
m
S
cos(
))
g
0 C
C
1 D
D
1
D
D
u
2
;
m1 S D l cos( D )) L cu
( cos )
x LS D sin( D ) l LS D cos( D ) 2 g sin .
В результате исследований Жуковым В.Г. были получены закономерности
параметров
торможения
башенных
кранов
при
их
наезде
на
ТУП
комбинированного типа (см. рис. 1.13 – 1.14).
В работе Лобова Н.А. [15] рассматривается метод расчета динамических
нагрузок на м/к двухбалочного мостового крана (где две главные балки заменены
одной балкой суммарной жесткости и массы), снабженного пружинными
буферами (рис.1.15).
32
Рис.1.15. Расчетная модель при наезде мостового крана на ТУП
по Лобову Н.А. [15]: С б - жесткость буфера; PТ -тормозные усилия колес;
LК - пролет крана; W- силы сопротивления передвижению крана; mК , mT соответственно, приведенные массы крана и тележки; EJ – изгибная
жесткость моста
Рассмотрев РМ с несколькими степенями свободы [9-15], следует указать,
что хотя последние и являются развитием РМ с 2-мя степенями свободы, они
также полностью не решают основные проблемы динамики наезда г/п кранов на
ТУП. Так, например, главная проблема применения гравитационных (безударных)
ТУП не решена: оценка устойчивости (положения в пространстве) г/п кранов, что
является недостатком расчетных моделей (см. рис. 1.13 - 1.14). Оценка
устойчивости г/п кранов в пространстве не решена и на примере других
расчетных моделей (см. рис. 1.6, 1.7, 1.10, 1.11, 1.16). РМ кранов с несколькими
степенями свободы также не позволили определить полный характер временного
процесса ударного нагружения буферов, а также действительную работу
металлоконструкций кранов при их наезде на ТУП.
33
1.3. Расчетные модели кранов на основе численных методов анализа со
многими степенями свободы в задачах их наезда на тупиковые упоры
Предположительно единственной, обнаруженной при проведении анализа,
работой
по изучению процесса наезда г/п крана на ТУП на основе метода
конечных элементов (МКЭ) оказалась работа
Haas T.N. [16], в которой
представлена конечно-элементная стержневая РМ однобалочного мостового
крана г/п 5 тонн (рис. 1.16).
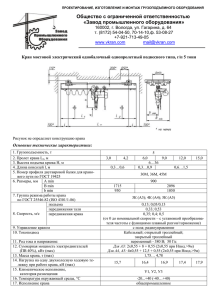
Рис.1.16. Конечно-элементная модель мостового крана г/п 5 тонн и его несущей
конструкции по Haas T.N. [16]
При наезде мостового крана на ТУП со скоростью 0,50 - 0,60 м/с Haas T.N.
учитывал такие факторы, как угол отклонения транспортируемого груза в момент
удара крана о ТУП, положение грузовой тележки, несимметричность монтажного
расположения ТУП, жесткость несущей конструкции поддерживающей кран
(колонн крановой эстакады), а также упругие характеристики буферов.
Полученные
максимальные
силы
удара
буфера
сравнивались
с
соответствующими силами, полученными согласно различным зарубежным
стандартам.
34
Работа Haas T.N. [16] на основе МКЭ позволила достаточно точно
определить силу взаимодействия полиуретановых буферов с ТУП на временной
оси, однако она так и не создала основ теории и методологии полного анализа
напряженно-деформированного состояния м/к мостовых кранов
при ударных
процессах.
1.4. Расчеты крановых буферных устройств и определение ударных
нагрузок при наезде грузоподъемных кранов на тупиковые упоры
1.4.1. Обзор и анализ отечественных научных работ и стандартов
В большинстве работ посвященных расчету крановых буферных устройств
при наезде грузоподъемных кранов на ТУП основными исходными данными для
расчета буферов кранов являются значения полученной кинетической энергии и
величины допускаемых замедлений (отрицательное ускорение) крана, которые
определяются, прежде всего, прочностными свойствами металлоконструкции
крана и подкрановых конструкций. Причем на практике буфера рассчитываются
на поглощение 10…25% кинетической энергии движущегося крана в момент
взаимодействия с ТУП.
В работе Петухова П.З. [17] предложено уравнение работ при наезде крана
на резиновый пластинчатый буфер:
Gкр 2 dx 2
V0 Gкр S ( Z S ) FaS ,
2 g
dt
(1.17)
где G кр - вес крана (тележки); V0 - скорость крана в момент наезда; dx / dt скорость крана в произвольный момент времени взаимодействия крана с
буфером; - коэффициент сопротивления передвижению; S – значение осадки
буфера; F Z - объем буферных пластин; aS - удельная работа деформации
резины, которая, на основании экспериментальной кривой (напряжение сжатия деформация) для данного буфера, выражена в функции ax f ( x) .
35
В другой работе Петухова П.З. [18] предложена формула для расчета
допускаемых ускорений аn мостовых кранов:
R (1 n ) Gгр
аn max д
1 g 1
ROC
Gkр
,
(1.18)
где Rmax д 0.9 S ; S - предел текучести материала м/к крана; ROC -допускаемое
2
напряжение в случае действия основных нагрузок; n 1 (1 м / м ) - полный
коэффициент сопротивления движению крана по подкрановым рельсам, величина
которого определяется с учетом приведенного к ходовым колесам тормозного
момента и момента от действия сил сопротивления передвижению; м М m / M c
- коэффициент, показывающий отношение величины тормозного момента на валу
тормоза М m к моменту сопротивления движению крана, приведенному к валу
тормоза; g – ускорение свободного падения; Gкр - вес крана; Gгр - вес полезного
груза.
В различных отечественных справочниках и учебниках по кранам [19,20]
приводятся уравнения для расчета крановых буферных устройств по их
энергоемкости. Причем практически везде буфера рассчитываются на поглощение
кинетической энергии крана движущегося со скоростью 50% номинальной при
замедлении крана не более 4 м/с2, согласно предложению ВНИИПТмаш,
поскольку «поглощение буферами полной кинетической энергии крана при
больших скоростях и массах неосуществимо». Так, в справочнике [20] говорится,
что при расчете буферов, если металлоконструкцию принять абсолютно жесткой
(что идет в запас усилия буфера), уравнение для кинетической энергии в общем
виде записывается так:
S
mV02
(Wk WТ )S Pds,
2
0
(1.19)
где m – масса движущихся частей крана (или тележки) и его механизма
передвижения, приведенная к ходовым колесам, кг; V0 – скорость крана или
тележки в момент удара: V0 0,5Vкр ; Vкр - номинальная скорость движения крана или
36
тележки, м/с; Wk - сопротивление передвижению, Н; WT - тормозное усилие,
приведенное к ободу колеса, Н; S – ход буфера, м; P - усилие буфера, Н. Значение
S
Pds в (1.19) для буферов: пружинных, пружинно-фрикционных и, приближенно,
0
для резиновых равно 0, 5Pmax S ; гидравлических (с переменным сечением
пропускного отверстия, обеспечивающим постоянное усилие) равно Pmax S .
Замедление
a,
м/с2,
тележки
или
крана
при
ударе:
a V02 / 2s (при
гидравлических буферах с постоянным усилием замедление в два раза больше).
При гибком подвесе груза полный учёт его массы mгр в уравнении (1.19) приводит
к завышению усилия P и буфера оказываются излишне жесткими. В первом
приближении, например, для мостовых кранов, значение mгр в величине m можно
не учитывать [21].
В
справочнике
[22]
говорится,
что
«буфера
должны
поглощать
кинетическую энергию масс перемещающегося крана или грузовой тележки»:
E
mкр 0,5mгр (0,5Vкр )2
2
k,
(1.20)
где mкр - масса крана или грузовой тележки; mгр - масса груза (с учетом грузовой
подвески); Vкр – номинальная скорость передвижения крана или тележки; k –
коэффициент, учитывающий податливость конструкции крана; для мостовых
кранов k = 0,80-0,85; для козловых кранов k = 0,60; грузовых тележек - k = 1,0.
Александров М.П. в работе [23] предлагает расчет пружинных буферов
вести при условии, что вся кинетическая энергия тележки или крана с
номинальным грузом переходит в потенциальную энергию упругой деформации
пружины. Тогда получают максимальное усилие в пружине буфера равное:
P
(Gгр Gкр )V0 2
agz
,
(1.21)
где V0 –скорость движения тележки или крана в момент наезда на буфер; z – число
буферов, воспринимающих удар; a – осадка пружины; Gкр и Gгр – соответственно
37
вес крана (тележки) и груза. Из уравнения (1.21) получают максимально
допустимую скорость движения тележки (или моста крана) при наезде на буфер:
Vmax
zPag
Gгр Gкр .
(1.22)
В случае, если скорость передвижения тележки (моста) крана превышает 32
м/мин, то требуется установка конечных выключателей ограничения хода крана.
В работе Кифера Л.Г., Абрамовича И.И. [24] рассматривается расчет
буферных устройств с учетом податливости металлоконструкции крана, для чего
авторами предлагается использовать результаты работы Крутикова И.П.. Таким
образом, уравнение баланса энергии при ударе грузовой тележки о препятствие
имеет следующий вид:
S
a
mmVm/2
n2 mмVм/2 PS
1 м
Jn
Wm Sa PdS ,
2
2
2
2
0
где
(1.23)
mmVm/2
/
- кинетическая энергия поступательного движения тележки; Vm 2
скорость тележки в момент удара; J n
n2
2
- кинетическая энергия вращающихся
mмVм/2
/
- кинетическая энергия моста; Vм - скорость
масс деталей тележки;
2
движения моста после
удара; P1S m - потенциальная энергия моста; P1 -
максимальное усилие в буфере; S м - сдвиг моста при ударе; Wm S a - работа
сопротивления передвижению тележки; Wm - сопротивление передвижению
Sa
тележки без учета работы тормозов; Sa - ход буфера;
PdS - работа буфера;
0
Очевидно, при расчете буферов по (1.23) не учитывается гибкий подвес
транспортируемого
груза, что,
как
известно
из практики, приводит к
преувеличенной оценке необходимой энергоемкости буферного устройства.
Известны и другие работы посвященные исследованию буферов и
амортизаторов кранов [25,26,27,28,29,30,31,32,33,34].
38
Согласно
[35]
нормативные
значение
горизонтальной
нагрузки,
направленной вдоль кранового пути и вызываемой ударом крана о ТУП, следует
определять по формуле:
mV0 2
F
,
f
(1.24)
где V0 – скорость передвижения крана в момент удара, принимаемая равной
половине номинальной, м/с; f – возможная наибольшая осадка буфера,
принимаемая равной 0,1 м для кранов с гибким подвесом груза г/п не более 50 т
групп режимов работы 1А-7А по ИСО 4301/1-86 и 0,2 м – в остальных случаях; m
– приведенная масса крана, определяемая по формуле:
m
mb
l l
(mc kmq ) 1 ,
2
l
(1.25)
где mb - масса моста крана, т; m c - масса тележки, т; mq - грузоподъемность крана,
т; k – коэффициент: k = 0 – для кранов с гибким подвесом груза; k = 1 – для кранов
с жестким подвесом груза; l – пролет крана, м; l1 - приближение тележки, м.
Расчетное
значение
рассматриваемой
нагрузки
с
учетом
коэффициента
надежности по нагрузке f принимается не более предельных значений
указанных в табл. 1.1.
Таблица 1.1. Предельные расчетные значения горизонтальной нагрузки
вызываемой ударом крана о ТУП [35]
Виды кранов
Предельные значения нагрузок F по
(1.24), кН (тс)
Электрические мостовые:
общего назначения групп режимов
работы 1А-3А
50(5)
общего назначения и специальные
групп режимов работы 4А-7А, а также
литейные
150(15)
специальные группы режима работы
8А с подвесом груза:
гибким
250(25)
жестким
500(50)
39
Расчёт резиновых (полиуретановых) буферов, как в отечественных [36], так
и в зарубежных [37,38,39] стандартах по мостовым грузоподъемным кранам
направлен на определение кинетической энергии, которую буфера должны
воспринять в момент соударения крана с ТУП. Далее полученное значение
энергии сравнивается с известными значениями энергоемкости буферов, таким
образом выбирается два буфера общая энергоемкость которых оказывается не
ниже полученного значения кинетической энергии движения крана.
Таким же образом рассчитываются буфера заводами - изготовителями
кранов и буферов. Стоит отметить, что часто изготовители кранов, также, как и
многие стандарты и правила, индивидуально вводят различные коэффициенты
нагрузок, избегая при этом характерные параметры, которые играют важную роль
в расчёте буферов, что может привести к значительной недооценке реальных
ударных нагрузок, которые испытывают буфера при наезде мостовых кранов на
ТУП.
Согласно [36] для расчета буфера следует предварительно выбрать два
буфера из условия
mV02
nE1
nE2 ,
2
(1.26)
где n – число буферов, одновременно воспринимающих кинетическую энергию;
E1 и E2 - соответственно, максимальные рабочие энергоемкости одного и другого
буфера, Нм; для пружинных и пружинно-фрикционных определяют работу
S
буфера по формуле
Pds
при условии полного хода буфера; m – масса крана
0
плюс 10% массы номинального груза; V0 0,5Vкр ; Vкр - номинальная скорость
движения крана, м/с.
Затем следует произвести окончательный выбор одного из буферов из
условия:
mV02
(Wк WT Wв )S nE,
2
(1.27)
40
где W в - нагрузка от ветра с динамическим давлением q = 125 Па по ГОСТ 145177 [40], Н;
Wк WТ m j,
(1.28)
где j – максимально допустимое расчетное замедление крана при торможении,
м/с2.
После
чего
следует
выбрать
буфер
меньшего
типоразмера,
удовлетворяющий условию(1.27).
В заключении следует подчеркнуть, что расчету нагрузок взаимодействия
г/п кранов с ТУП посвящено множество работ, однако их обобщение в среде
краностроителей не привело к разработке отечественного отраслевого стандарта,
по крайней мере, аналогично приведенным ниже работам [37, 38,39,42,43].
1.4.2. Обзор и анализ зарубежных научных работ и стандартов
Определение силы удара буферов о ТУП немецкой фирмой «Demag» [41]
производится на основании немецкого СНиПа DIN 15018 [37], в котором
рассматриваются только жестко соединенные массы при определении силы удара
буферов крана о ТУП, то есть масса транспортируемого груза рассматривается
как жестко закрепленное тело к мосту мостового крана. При этом также
предполагается,
что
на
несущую
металлоконструкцию
крана
наложено
достаточно связей жесткости для того, чтобы предотвратить её видимые
горизонтальные деформации при наезде крана на ТУП. Таким образом, в DIN
15018 только буфер рассматривается как упругое тело, при этом фирма «Demag»
использует отдачу буфера, массу твердых элементов крана, скорость удара и
графики зависимостей энергии и деформации, а также деформации и силы удара
для того, чтобы определить усилия в буферах, возникающих при ударе.
Поглощённая энергия в момент удара буферов о ТУП определяется формулой
кинетической энергии:
m V02
E
,
9965
(1.29)
41
где
E
- поглощенная энергия в момент удара (Нм); m - масса крана без учета
массы транспортируемого груза (кг); V0 – скорость наезда крана на ТУП (м/мин);
9965 – постоянная величина. При переводе м/мин в м/с в уравнении (1.29)
значение знаменателя должно быть 7200. Таким образом, суть
метода
динамического анализа нагружения буфера по [41] заключается в определении
поглощенной энергии E .
Пункты 5.7.6 и 5.7.7 Южно - африканского стандарта SABS 0160-1989 [42]
посвящены двум методам с различными подходами определения максимальной
силы удара буфера при наезде крана на ТУП. Максимальная сила удара буфера
крана о тупиковый упор определяется на основе двух подходов:
а) сила удара определяется как сумма веса моста крана и грузовой тележки;
б) сила удара определяется при предположении, что буфер крана ударяется
о ТУП с максимально возможной скоростью, принимая во внимание упругую
деформацию ТУП и буфера.
Для того чтобы получить наибольшие силы удара буфера крана о
тупиковый упор в пункте 5.7.7 SABS 0160-1989 [42] предлагается следующее:
«для определения нагрузок крана, указанных в пункте 5.7.6, необходимо принять
величину транспортируемого груза равной номинальной грузоподъемности крана,
положение грузовой тележки на мосту крана и положение крана на несущих
поддерживающих конструкциях здания такими, которые произведут наиболее
неблагоприятное воздействие на здание или на часть проектируемого здания».
Таким образом, по методу (а), сила удара буфера крана о ТУП определяется как
произведение массы крана с тележкой на ускорение свободного падения (масса
крана с тележкой × 9,81 м/с2).
По методу (б), согласно пункта 5.7.6 SABS 0160-1989, сила удара является
функцией от веса крана с тележкой, максимальной скорости удара, упругой
деформации ТУП и буферов. Поскольку не ожидается больших продольных
смещений несущей конструкции крана и ТУП за время удара, их упругая
деформация принимается равной нулю. Таким образом, при расчетах буферов
кранов
принимается
во
внимание
только
упругие
(деформационные)
42
характеристики буферов. В SABS 0160-1989 используется стандартный способ
определения кинетической энергии:
m V02
E
,
2
(1.30)
где E - энергия поглощенная буфером в момент удара (кН); m - массы элементов
крана, без учета массы полезного груза (кг); V0 – скорость наезда крана на ТУП
(м/с).
В случае, если скорость наезда крана на ТУП в уравнении (1.30) переведена
в м/мин, тогда уравнение (1.30) примет вид:
m V02
E
.
7200
(1.31)
Уравнения (1.29) и (1.31) одинаковы, за исключением того, что уравнение
(1.29) в знаменателе имеет величину 9965. Чем больше знаменатель в (1.29) и
(1.31),
тем меньше поглощённая энергия, что в свою очередь приводит к
меньшей расчетной силе удара буферов крана о ТУП.
Согласно пункту 2.11.1 Европейского стандарта EN 1991-3: 2003 [39], для
определения максимальной силы удара буфера крана о ТУП необходимо:
1) в зданиях с крановыми нагрузками силы, возникающие от удара буферов
крана о ТУП, должны быть подсчитаны исходя из кинетической энергии всех
возможных частей крана, двигающегося со скоростью от 0,7 до 1,0 номинальной
скорости;
2) силы удара буферов крана о ТУП умножаются на динамический
коэффициент 7 , согласно табл. 1.2 [39], для того чтобы учесть возможные
динамические эффекты, принимая во внимание распределенные массы крана и
характеристики буфера:
HB,1 7 V0 m SB ,
(1.32)
где H B ,1 горизонтальная продольная сила вследствие удара; 7 динамический
коэффициент взятый из таблицы 1.2; V0 - 70% максимальной продольной скорости
43
крана (м/с); m масса крана и транспортируемого груза (кг); SB динамическая
жесткость буфера (Н/м).
Таблица 1.2. Значения динамических коэффициентов 7 в зависимости от
характеристических коэффициентов буфера b согласно таблице 2.10 EN 19913: 2003[39]
Динамический коэффициент
Характеристический коэффициент
буфера
При 0, 0 b 0, 5
7 = 1,25
7 = 1,25+0,7×( b - 0,5)
При 0,5 b 1, 0
Таким образом, по методике EN 1991-3:2003 [39] сила удара буфера крана о
ТУП зависит от веса крана (включая тележку) и транспортируемого груза,
максимальной скорости удара, упругой деформации буферов и динамического
коэффициента 7 . Здесь, в (1.32), также как и в методе (б) SABS 0160-1989 [42],
не предполагаются значительные продольные перемещения конструкции крана и
ТУП во время удара, в следствии чего их упругую деформацию принимают
равной нулю. Таким образом предполагается, что только буфера крана обладают
упругостью и могут деформироваться при ударе о ТУП. Согласно EN 1991-3:2003
[39] расчетная скорость удара может быть понижена до 70% максимальной
продольной скорости крана в случае, если крановый путь оборудован концевыми
выключателями механизма передвижения крана (МПК). Поэтому в момент удара,
согласно
EN
1991-3:2003,
максимальная
кинетическая
энергия
крана
определяется следующим образом:
E 0,5 m (0,7 Vкр )2 ,
(1.33)
где m - масса крана и полезного груза (кг); Vкр - скорость наезда крана (м/с) в
момент взаимодействия буферов крана с ТУП.
В (1.32) принято, что m и V0 известны. Неизвестными параметрами в (1.32)
являются только жесткость буфера SB и динамический коэффициент 7 .
44
Жесткость буфера определяется отношением расчетной силы удара буфера f и
деформации буфера, используя необходимые экспериментальные графические
зависимости, предоставленные заводом-изготовителем крана. Динамический
коэффициент в зависимости от типа буфера принимается согласно таблице 1.3.
Таблица 1.3. Динамический коэффициент 7 определяемый в зависимости от
типа буфера
Тип буфера
Характеристический
Динамический коэф. 7
коэф. буфера b
Гидравлический
1,00
1,60
Пружинный
0,50
1,25
Полиуретановый
0,25
1,25
Согласно Приложению Б Австралийского стандарта AS 1418.18:2001 [38],
силы удара буфера о ТУП должны определяться по AS 1418.1 [43]. При
отсутствии информации от изготовителя кранов, касающейся характеристик
буферов, силы удара буфера следует определять по формуле (1.34):
Pb C b N ,
(1.34)
где C b - коэффициент принимаемый из таблицы B4 AS 1418.18 [38] (см. табл.1.4);
N - сумма реакций всех ходовых колес крана (вертикальные нагрузки) без груза.
Согласно [38], тормозной путь крана зависит от типа буфера и должен быть
не менее 50 мм и не более 300 мм.
Таблица 1.4. Значение коэффициента Cb согласно таблицы B4 AS 1418.18 [38]
Cкорость
движения крана,
м/с
0,50
1,00
1,50
Тормозной путь, м
0,10
0,20
0,30
0,26
1,02
2,29
0,13
0,51
1,15
0,08
0,34
0,74
45
Сила удара буфера крана о ТУП, согласно Приложению Б AS 1418.1[43],
зависит от вертикальных нагрузок на ходовые колеса крана без полезного груза,
продольной скорости крана и тормозного пути крана во время его движения к
ТУП. Такой метод используется тогда, когда не известны характеристики буфера,
а также для предварительной оценки нагрузок ударного взаимодействия крана с
ТУП при конструировании буфера. Сила удара буфера крана о ТУП изменяется в
(1.34) в зависимости от коэффициента C b , который, в свою очередь, зависит от
скорости движения крана и тормозного пути.
Согласно AS 1418.1 [43] полная требуемая энергоемкость буфера и
максимальная сила удара буфера PB должны быть определены при скорости
движения крана равной 85% от полной скорости движения, а для грузовой
тележки
-
100%
от
номинальной
скорости
движения.
При
наличии
автоматических тормозных устройств максимальная сила удара буфера PB
должна быть определена для скорости не менее 70% от полной скорости
движения крана. Полная энергия E должна быть поглощена всеми буферами,
участвующими при наезде крана на ТУП, при этом каждый буфер должен
поглотить количество энергии в соответствии со своей жесткостью.
Далее, согласно [43], результирующие силы должны быть помножены на
коэффициент 6 для того, чтобы учесть упругие деформации, которые не могут
быть подсчитаны для твердотельных моделей кранов. Коэффициент 6 нужно
принять равным 1,25 при буферах с линейными характеристиками (например,
пружина) и 1,60 при буферах с прямоугольными характеристиками (например,
гидравлические
буфера
характеристиками,
постоянного
значения
усилия).
коэффициентов
Для
6
буферов
с
определяются
другими
согласно
следующим зависимостям:
6 =1,25, при 0,0 b 0,5 ;
6 =1,25 + 0, 7 ( b 0,5) , при 0,5 b 1,0 ,
где характеристический коэффициент буфера b определяется аналогично EN
1991-3: 2003 (см. табл. 1.3).
46
Согласно пункту 3.8 шестого технического доклада AISE [44], для того
чтобы определить максимальную силу удара буфера крана о ТУП необходимо
следующее: максимальная величина ускорения торможения, как для всего крана,
так и для грузовой тележки, не должна превышать 0,325 м/с2 при 50%
максимальной номинальной скорости движения крана. Буфера крана должны
быть
способны
поглощать
полную
энергию
при
100%
номинальной
максимальной скорости движения крана.
Между кранами (в случае, если два крана работают на одном рельсовом
пути) либо тележками (в случае, если две тележки расположены на одном кране)
буфера должны быть способны поглощать энергию при скорости обоих кранов
либо тележек движущихся навстречу друг другу
70% максимальной
номинальной скорости. Если рассматривается движение одного крана (тележки),
расчет должен вестись при 100% максимальной номинальной скорости крана
(тележки).
Для подсчета энергии поглощаемой буфером мостового крана, согласно
[44], тележка должна быть установлена в конце моста крана, что произведет
максимальную ударную реакцию силы от крана и тележки. Энергоемкость буфера
должна определяться при условии выключенного электродвигателя МПК крана и
при отсутствии транспортируемого груза на крюковой подвеске. Буфера
мостовых кранов должны иметь контактирующую поверхность не менее 12,7 см в
диаметре,
быть расположены по центру рельса и установлены так, чтобы
обеспечить достаточное расстояние между кранами в случае их наезда друг на
друга при полном сжатии буферов.
Несущие конструкции сооружения с крановыми нагрузками и ТУП должны
быть спроектированы так, чтобы выдерживать силы удара при движении крана со
скоростью равной 100% максимальной номинальной скорости крана. Допустимое
увеличение номинальных напряжений в этом случае составляет 50%.
Следует принять во внимание, что силы удара могут быть понижены путем
увеличения хода буфера. Например, увеличение хода буфера от 10,6 см до 25,4
см, понижает силу удара ( FA ) с 312,57 кН до 129,11 кН.
47
Kohlhaas
S.
провел
серию
натурных
экспериментов
по
наезду
однобалочного мостового крана г/п 5 т (КЭ модель которого изображена на рис.
1.16) на ТУП, результаты которых описаны в работе [45].
В результате
экспериментальных исследований удалось измерить деформации и усилия
возникающие в полиуретановых буферах, а также получить зависимости скорости
крана от времени в течение его столкновения с ТУП. По результатам
проведенных экспериментов Kohlhaas S. построил графики зависимостей сил
ударного взаимодействия от деформаций буферов (гистерезисы первого цикла
ударного взаимодействия крана с ТУП) (рис.1.17). На графике (см. рис. 1.17)
отчетливо видна разница в значениях усилий возникающих в правом и левом
буферах. По мнению Kohlhaas S., такая разница может возникнуть из-за
небольших различий в механических свойствах материалов буферов, а также изза несимметричности их установки на кране. На рис.1.18 приведена зависимость
силы удара буфера от времени, когда кран наезжает на ТУП без груза, из которой
видно, что за первым пиком удара следуют два других по времени,
соответственно, через 1с и 1,8 с. Как показало исследование [45], последующие
наезды крана на ТУП вызывает остаточный момент электродвигателя МПК.
Автор настоящей работы отмечает, что никто из заводов-изготовителей кранов не
приводил ранее информацию о влиянии остаточного момента электродвигателя
МПК на процесс взаимодействия крана с ТУП.
48
Рис.1.17. Сравнение упругих характеристик левого и правого
полиуретановых буферов DPZ-100 при наезде однобалочного мостового крана на
ТУП с начальной скоростью 0,55 м/с (ЛБУФ и ПБУФ – соответственно левый и
правый буфера крана) [45]
Рис.1.18. Зависимость средней силы удара буфера от времени при столкновении
мостового крана г/п 5т без груза с ТУП [45]
49
Автором настоящей работы аналитически были подсчитаны значения
поглощаемой кинетической энергии резиновыми (полиуретановыми) буферами в
предположении наезда мостового крана г/п 15/3 т (рис.2.2) на ударные ТУП
используя методы расчета различных стандартов (табл.1.5). В результате был
сделан вывод о том, что по причине использования разных подходов при расчете
буферов различными стандартами происходит значительное расхождение
подсчитанных значений энергий поглощаемых буферами, что в свою очередь
создает неопределенность при выборе буферов необходимой энергоемкости.
Таблица 1.5. Расчет поглощаемой энергии буферами при наезде мостового крана
г/п 15/3 т на ТУП со скоростью 1,3 м/с подсчитанные согласно различным
стандартам
Название стандарта
а) Российский стандарт
ОСТ 24.191.37-78 [36]
б) Немецкий СНиП
DIN 15018-2 [37]
в) Австралийский СНиП
AS 1418.18-2001 [38]
г) Европейский стандарт
EN 1991-3: 2003 [39]
д)Южно-африканский стандарт
SABS 0160-1989 [42] Метод b
Скорость
м/с
крана, Масса
крана
груза, кг
и Поглощённая
энергия
буферами, кНм
0,5×1,3=0,65
25800+15000×0,1
= 27300
5,767
1,3×60=78 (м/мин)
25800
15,751
0,85×1,3=1,105
25800
15,751
0,7×1,3=0,91
25800+15000=40800
16,893
1,3
25800
21,801
Рис. 1.19. Сравнение расчетных значений энергии поглощаемой буферами (см.
табл. 1.5) в момент наезда мостового крана г/п 15/3 т на ТУП
50
В заключение настоящей главы стоит также отметить наиболее важные
работы посвященные
динамике передвижения кранов по рельсовым путям.
Прежде всего, работы Липатова А.С. [46] и Лобова Н.А. [47].
1.5. Постановка задачи диссертационного исследования
1.Разработать конечно-элементные РМ со многими степенями свободы
отражающие действительные м/к мостового, портального и башенного кранов.
2.Провести
вычислительные
эксперименты
с
различными
эксплуатационными состояниями наезда РМ кранов на ударные и безударные
ТУП.
3.Определить
фактическую
кинетическую
энергию
поглощаемую
резиновыми буферами в процессе наезда г/п кранов на ударные ТУП.
4. Исследовать фактическое НДС м/к кранов пролетного и стрелового типов
при аварийном наезде на ударные и безударные ТУП.
5. Для подтверждения теоретических исследований процессов наезда г/п
кранов на ударные и безударные ТУП, а также адекватности поведения созданных
конечно-элементных РМ кранов, выполнить экспериментальные исследования
процесса наезда г/п кранов на ТУП.
1.6. Выводы к главе 1
На основании проведенного обзора и анализа работ по проблеме наезда г/п
кранов на ТУП можно сделать следующие выводы:
1.
Несмотря
на
то,
что
научно-исследовательские
работы
[4,8,10,11,12,13,14,15,16] заложили практические и теоретические основы по
проблеме взаимодействия г/п кранов с ТУП, проблема пространственного
поведения и работы действительных м/к кранов ( в том числе буферов и ТУП) так
и не была решена, прежде всего, по причине чрезмерного упрощения РМ кранов –
использовались в основном модели с 2-3 степенями свободы.
51
2. Практически все существующие работы, посвященные исследованию
взаимодействия г/п кранов с ТУП, рассматривают только краны мостового типа.
Исследованиям данной проблемы касательно башенных и козловых кранов
уделено недостаточно внимания, а исследования по проблеме наезда портальных
типов кранов на ТУП вовсе не были обнаружены при обзоре научной литературы
[4,8,10,11,12,13,14,15,16].
3. Стандарты по расчету буферов г/п кранов [35-39,42,43] приводят
различные, основанные на опыте эксплуатации кранов, методы расчета и
определения усилий возникающих в буферах при наезде кранов на ТУП которые
не имеют достаточно обоснованных научных и аналитических подтверждений.
Связано это с тем, что такие расчеты буферов практически не учитывают
действительную м/к кранов, а в большинстве случаев кран принимается просто
как абсолютно твердое тело. Так, стандарты [35-39,42,43] индивидуально вводят
различные коэффициенты, например, для учета жесткости м/к крана, избегая при
этом другие важные эксплуатационные состояния, которые играют значительную
роль в расчёте буферов, что приводит к недооценке или переоценке реальных
ударных нагрузок (см. табл. 1.5). При этом не было обнаружено ни одного
научного обоснования данным коэффициентам, что, в свою очередь,
создаёт
неопределенность в работе проектировщиков и инженеров по кранам.
4.
Стоит
особенно
отметить,
что
главная
проблема
применения
гравитационных (безударных) ТУП, прежде всего, для башенных кранов, по
прежнему не решена: оценка устойчивости (положения в пространстве) кранов в
результате взаимодействия с ТУП. Актуальность данной проблемы вытекает,
прежде всего, из того, что в известных нормах и стандартах по расчету башенных
кранов [48] также, как и в научных работах [14], используются двухмассовые
расчётные схемы кранов, что, в свою очередь, не позволяет оценить
пространственное поведение м/к башенного крана
при его движении по
рельсовому пути и наезде на безударные ТУП. При этом остается важным, что
параграф 1.4 «Требования к расчёту крана и его элементов на однократное
действие
наибольших
нагрузок»
работы
[48]
не
учитывает
нагрузки
52
воздействующие на кран в результате наезда на безударные ТУП. Кроме того,
раздел 3 «Расчет устойчивости кранов и стрел против опрокидывания» работы
[48] также не рассматривает уровень устойчивости положения в пространстве
башенных кранов от опрокидывания при их наезде на безударные ТУП, при том,
что согласно [49] наибольшее число аварий среди г/п кранов приходится именно
на башенные краны.
5. Из анализа научных работ, стандартов, норм и правил по г/п кранам
можно сделать следующие общие выводы, согласно которых при расчёте
резиновых (полиуретановых) буферов г/п кранов, а также при рассмотрении
процессов взаимодействия г/п кранов с ударными и безударными ТУП:
5.1.
не
учитываются
действительные
упругие
и
демпфирующие
характеристики буферов;
5.2. не учитываются упругие свойства материала из которого изготовлен
амортизатор ТУП;
5.3. не учитывается поведение и влияние жёсткости действительных м/к г/п
кранов на процесс силового взаимодействия кранов с ударными и безударными
ТУП;
5.4. не учитывается длина подвеса транспортируемого груза на силы
взаимодействия кранов с ТУП;
5.5. не учитывается влияние свободного колебания груза на канатном
подвесе;
5.6. практически во всех стандартах и научных работах не учитывается
влияние положения грузовой тележки в пролёте моста крана (для мостовых,
козловых кранов), а также влияние величины вылета стрелы с полезным грузом
(для портальных и башенных кранов) на процесс взаимодействия г/п крана с ТУП.
6. В результате анализа рассмотренных работ по проблеме взаимодействия
г/п кранов с ТУП не удалось обнаружить ни одной работы, где было бы отражено
экспериментальное исследование механических свойств резиновых буферов г/п
кранов, а также их реальное поведение в результате взаимодействия с ТУП. Стоит
особенно отметить, что остается неопределенность и в том, как отечественный
53
изготовитель резиновых буферов марки БР определяет их энергоёмкость. Если,
например, у зарубежных изготовителей буферов [41, 50] имеется информация по
экспериментальным исследованием буферов (в основном, полиуретановых), в
частности, на статическое сжатие, то у отечественного производителя она
полностью отсутствует. Важно, также отметить, что динамические испытания на
удар материала буферов не проводятся, а
ТУ предприятий-изготовителей
буферов (например, ТУ 2500-376-00152106-94 [51]) также не содержит
информации о пределе прочности материала буферов при ударном нагружении.
7. За последние десятилетия накоплен значительный двухсторонний опыт, (а) как
по интенсивному приложению компьютерных технологий в решение научноисследовательских и проектировочных задач в области изготовления и
безопасной
эксплуатации
г/п
кранов,
так
и
(б)
по
разработке
и
совершенствованию приложения теории метода пространственных конечных
элементов (МКЭ) к численному решению задач и проблем исследовательского
характера в области подъемно-транспортной техники. Однако, несмотря на эти
достижения,
удалось обнаружить незначительное число работ по конечно-
элементному исследованию процессов взаимодействия г/п кранов с ТУП [16, 45].
54
Глава 2. Методика построения расчетных моделей грузоподъемных
кранов
2.1. Основные положения конечно-элементной теории сооружений
Развитие вычислительной техники и увеличение мощности компьютеров
обусловили широкое внедрение в расчётную практику численных методов, среди
которых наиболее эффективным применительно к расчёту машиностроительных
конструкций принято считать метод конечных элементов (МКЭ), с помощью
которого машиностроительные конструкции грузоподъёмных кранов методами
дискретизации сводятся к стержневым, пластинчатым или объёмным системам,
находящимся под действием произвольных внешних нагрузок (рис. 2.1).
Рис.2.1 Конечные элементы используемые при разработке расчетных моделей
кранов: стержень (а), тонкая пластина (б) и объёмный КЭ (в)
За основу разработки РМ г/п кранов принята математическая модель
представляющая собой нелинейное матричное уравнение движения n-го порядка
МКЭ имеющее вид:
d 2v
dv
[ M ]nn 2 [C ]nn [ K ]nn v(t )1n
dt 1n
dt 1n
(2.1)
dv
{Pст }1n {Pдин }1n R ,v t ,
dt
1n
где [M , C, K ] матрицы масс, демпфирования и жесткости; v t , Pст , Pдин , R соответственно векторы перемещений, статических, динамических нагрузок и
нелинейных сил (трения, нелинейно-деформируемых характеристик материалов
55
буферов и ТУП, включающихся и выключающихся связей и др.). Очевидно, из
(2.1) вытекают его частные случаи: уравнение статического равновесия
[ K ]nn v1n {Pст }1n ,
(2.2)
и уравнение недемпфированных собственных колебаний конструкции кранов
d 2v
[ M ]nn 2 [ K ]nn v(t )1n {0} .
dt 1n
(2.3)
Кроме того, если в (2.1) исключить нелинейные факторы входящие в вектор
R1n
,
то
получим
линейное
уравнение
движения
характеризующее
динамический режим кранов до их наезда на ТУП.
Первым процессом в формировании матричного уравнения движения (2.1)
является построение для выбранных конечных элементов соответствующих
матриц жесткости, масс и демпфирования. Матрицы жёсткости для стержневого
[ K ]12jk12 , пластинчатого четырёхугольного [ K ]2020 (треугольного - [ K ]1515 ) и
объёмного КЭ тетраэдра [ K ]1212 (гексаэдра - [ K ]2424 ) определяются как:
K BT D B dV ,
(2.4)
V
где [ B ] - матрица деформаций-перемещений; [ D] - матрица материала
(упругости); dV – дифференциал объёма КЭ. Матрица масс КЭ определяется как
T
[ M ] N N dV ,
(2.5)
V
где N - матрица функции формы КЭ;
- плотность материала КЭ.
Для получения матриц жёсткости и масс полной системы [ K ]nn и [ M ]nn в
общей системе координат OXYZ необходимо соответствующие матрицы
отдельных конечных элементов перевести из местной системы координат oxyz в
общую OXYZ [52] с использованием присущих каждому jk КЭ (c n* степенями
свободы) матриц преобразования координат [T]:
jk
T
jk
jk
T
jk
, M n*n* T n*n* M n*n* T n*n* ,
K OXYZ
K oxyz
n*n* T
n*n* T
n*n*
n*n*
OXYZ
oxyz
(2.6)
56
после чего матрица жёсткости полной системы (аналогично матрица масс)
формируется методом суперпозиции:
k11 ... k1k ... k1n
jk jk
K n*n* k j1 ... k jk ... k jn .
OXYZ nn
jk 1
kn1 ... knk ... knn nn
jk s
K nn
(2.7)
Демпфирующие характеристики конструкции крана учитываются матрицей
демпфирования [C], которая формируется пропорционально матрице масс и
жёсткости:
[C] = α[ M ][M ] + α[ K ][K ] .
(2.8)
В (2.8) коэффициенты пропорциональности имеют вид
α[ M ] δз,1ω1 / π ;
α[ K ] δз,1 / πω1 ,
где δ з,1 , ω1 - соответственно декремент и частота низшей формы колебаний
несущих элементов РМ кранов ( з = 0,05 - 0,1) [53].
Кроме (2.8), в расчетном анализе использовалась матрица затухания с
частотно-независимым внутренним трением А. И. Цейтлина[54]:
0,5
С М М К Г ,
1
(2.9)
где Г – матрица потерь А. И. Цейтлина. Для однородных конструкций, таких
как листосварные металлоконструкции кранов мостового типа
Г з з / .
Прямое численное интегрирование нелинейного уравнения движения (2.1)
проведено неявным методом Ньюмарка–β в сочетании с итерационным
модифицированным методом Ньюмарка – Рафсона для уточнения решения
уравнения движения (2.1) [55]. Одношаговая схема интегрирования по времени
уравнений движения (2.1) по методу Ньюмарка-β имеет вид[56]:
1
v i 1 v i hv i h 2
v i
v i 1 ,
2
(2.10)
i
v i 1 v i h[(1 )v
v i 1 ] .
(2.11)
57
где
и
– параметры интегрирования Ньюмарка, h - временной шаг
интегрирования.
После решения матричного уравнения (2.1) и вычисления вектора
неизвестных
перемещений
v(t )1n
в
общей
системе
координат
OXYZ
определяются узловые внутренние усилия и параметры НДС.
В частности, вектор деформаций определяется по формуле
L
Д
T
v(t )1n* T n* n* xx yy zz yz xz xy ,
(2.12)
где L Д - матрица дифференциальных операторов в частных производных;
T n* n*
- матрица преобразования «МСКОСК», а вектор напряжений
определяется по формуле
T
D xx yy zz yz xz xy
.
(2.13)
Задавшись IV-ой гипотезой прочности, определяется эквивалентное
напряжение в любом узле РМ крана:
IV
экв
1
( xx yy )2 ( yy zz ) 2 ( zz xx )2 6( xy2 yz2 zx2 ) .
2
(2.14)
Для решения контактной задачи взаимодействия г/п кранов с ударными и
безударными ТУП использовался метод множителей Лагранжа, преимущество
которого перед другими методами заключается в том, что в данном методе
кинематические условия контакта выполняются точно, несмотря на то, что
введение множителей Лагранжа приводит к усложненной формулировке
уравнений движения (2.1) [57]. Решение контактной задачи сводится к:
а) геометрическому определению проникновения контактирующих тел;
б) определение сил предотвращающих взаимное проникновение контактирующих
тел, для чего к стандартному уравнению принципа возможных перемещений,
применённому к двум независимым телам, которые входят в контакт, добавляется
потенциал контактных сил:
Wc t x1 x2 dc ,
c
(2.15)
58
где с – поверхность контакта между телами B1 и B2 ; t – вектор поверхностных
контактных сил, действующих на поверхности с.
Конечно-элементная нелинейная математическая модель систем со многими
степенями свободы (2.1) является основой для построения РМ г/п кранов,
необходимых в данной работе для исследования процесса их взаимодействия с
ТУП.
2.2. Особенности конечно-элементного моделирования грузоподъёмных
кранов
1. Ключевые устройства кранов определяются при анализе их как систем с
точки зрения подсистем, внутри последних также должны быть определены
ключевые
устройства,
обеспечивающие
минимально
необходимое
их
функционирование даже в условиях сочетания самых неблагоприятных сочетаний
нагрузок .
2. Построение РМ должно исходить из форм нагружения и деформаций
конструкций кранов в том числе при ударных воздействиях, подтверждающихся
опытом инженерной практики. В особенности для автора настоящей работы, как
пользователя программных разработок основанных на МКЭ, важна «физическая
нелинейность», поскольку рассматривается задача ударного взаимодействия
резиновых
нелинейно-упругих
буферных
устройств
кранов
с
ТУП,
оборудованными упругими амортизатороми, отличается от линейной тем, что
функциональная линейная зависимость между напряжениями и деформациями
заменена некоторой нелинейной функцией.
3. Расчётный анализ кранов основан на разработке РМ, учитывающих
пространственный характер работы их м/к и механизмов.
4. РМ кранов не должны приводить к отрыву частных задач от общего
процесса расчётного анализа кранового оборудования.
5. РМ кранов наряду с обеспечением их прочности и устойчивости должны
обеспечивать их экономические достоинства.
59
6.
Аппроксимирующая
модель, разработанная
на
основе
конечно-
элементного метода расчета, с учетом рассмотренных выше принципов должна
учитывать, что г/п краны являются системами переменных эксплуатационных
состояний.
7. При расчетном обосновании устойчивости положения в пространстве
свободностоящих и передвижных конструкций г/п кранов расчетную модель
рекомендуется представлять в виде нелинейной системы, связанной с крановыми
рельсовыми
путями
(КРП)
силами
трения
качения
и
скольжения
и
включающимися (выключающимися) связями.
8. Для кранов с переменными параметрами внешних эксплутационных
состояний - массы транспортируемого груза, положения на мосту грузовой
тележки, либо изменения вылета стрелы верхнего строения портальных,
башенных кранов относительно КРП, высоты подъема полезного груза и др.,
расчет параметров НДС следует проводить на основе предварительного анализа
РМ с целью определения наиболее невыгодного эксплуатационного состояния.
9. Недостаточное компьютерное обеспечение процесса расчётного анализа
кранов зачастую приводило проектировщиков к использованию простейших РМ,
что, по мнению автора, успешно устранено в настоящее время широким
применением метода конечных элементов (МКЭ) [3].
В заключение укажем, что компьютерные технологии обусловили новый
толчок в развитии теории, технологии и практики построения аппроксимирующих
расчетных моделей подъёмных сооружений применительно к пользованию
программными комплексами ANSYS [58,59], SCAD [60] , NASTRAN [61], ЛИРА
[62] и др.
Этому фактору спопобствовали работы А.В. Перельмутера и В.И. Сливкера
[63], Л.А. Розина [64], В.С. Карпиловского [65], И.И. Гольденблата [66,67,68],
А.С. Городецкого [69], Н.Н. Панасенко [70], А.Н. Орлова и его учеников Ф.
Флюгель, Д.Е. Бортякова [71, 72, 73, 74, 75, 76, 77], К.П. Манжулы [78], С.А.
Соколова [79] и др.
60
Наряду с указанными достижениями, стоит сожалеть, что нормативные
документы – ГОСТ 28609 – 90 [80], СТО 24.09-5821-01-93 [81], пособие [82] и РД
22-166-86 [48] и, возможно, другие, не предложили своих рекомендаций по
разработке конечно-элементных расчетных моделей подъёмных сооружений.
2.3. Основные положения дискретизации континуальных систем
В
основу
построения
произвольной
конечно-элементной
модели
стержневых м/к кранов положен тонкий стержень с прямолинейной осью.
Материал
стержня
предполагается
изотропным
и
линейно
упругим,
а
перемещения-малыми. Массивные тела и сплошные среды конструкций кранов
моделируются методами трехмерной теории упругости. При использовании МКЭ,
ввиду многообразия форм трехмерных элементов конструкций для построения
адекватных РМ, используется набор КЭ различной формы. На практике
использовались элементы в форме четырехгранника - тетраэдра и шестигранника
- гексаэдра с плоскими гранями.
Для дискредитации стержневых элементов и сплошных сред м/к г/п кранов,
имеющих ∞ число степеней свободы, воспользуемся основной сущностью теории
МКЭ
по их аппроксимации КЭ с конечным числом степеней свободы,
взаимодействующих между собой только в узловых точках (узлах), при этом
каждый КЭ характеризуется [83, 84, 85, 86, 63] :
1)
размеренностью
используемого
пространства (одномерное, двумерное,
трёхмерное);
2) геометрической формой, которая, чаще всего, является одной из простейших
геометрических фигур (отрезок прямой, пластина четырехугольника, трёхмерный
тетраэдр и т.п.);
3) набором узлов, располагаемых на линиях (поверхностях) раздела элементов и
являющихся общим для граничащих друг с другом элементов;
4) набором используемых внешних степеней свободы, отнесенных к узлам перемещения, повороты депланации и т.п.;
61
5) системой аппроксимирующих функций, в частности – для стержневых
конечных элементов, - функций Эрмита [87], определяющих внутри области e
приближенные выражения для компонент перемещений. Для трёхмерных КЭ
функции формы связаны со степенями свободы узлов КЭ, которые однозначно
определяются значениями этих компонент, заданными в узлах для всех степеней
свободы элемента;
6) физическим законом, связывающим напряжения и деформации КЭ;
7) перечнем ограничений и рекомендаций по применению различных базовых КЭ
(стержень, пластина, объемное тело).
Здесь автором учитывалось, что выбор степеней свободы конечных
элементов
и
соответствующих
аппроксимирующих
функций
полностью
определяет скорость сходимости и оценку погрешности МКЭ.
Поскольку число степеней свободы РМ, например, портальных кранов
измеряется тысячами, в таких условиях невозможно себе представить «ручное»
составление
конечноэлементной
использовались
сетки,
автоматические
сеточные
поэтому
в
генераторы,
настоящей
качество
работе
которых
определяется списком реализованных функциональных возможностей, которые, в
частности, в вычислительной системе ANSYS исчисляются десятками. К ним,
например, относится автоматическая сшивка уже построенных сеток на
сопрягаемых поверхностях, создание объемной трехмерной сетки по имеющейся
поверхностной сетке, перестройка сетки в соответствии с полученными
результатами расчёта и другие [59].
В заключение укажем, что в оценку надёжности и качества машинных
расчетов
МКЭ
значительный
вклад
вносят
неопределенности,
наиболее
характерными из которых, кроме способов дискретизации, являются расчетные
сочетания нагрузок и поиск наиболее невыгодного нагружения крана [79, 88].
Ещё одной важной неопределенностью при разработке дискретной конечноэлементной модели существующего крана, находящегося в эксплуатации,
является учёт повреждений и дефектов накопленных за жизненный цикл,
идентифицированных в результате технического диагностирования [89,90] их
62
механизмов и м/к. Если начальные несовершенства в виде коррозионных
повреждений и остаточных изгибных деформаций элементов м/к могут быть
учтены деформационным расчетом либо путем введения в вектор нагрузок
дополнительных эквивалентных усилий, то моделирование многочисленных
шарнирных соединений ШССС, ОПУ, флюгеров ходовых тележек портальных и
башенных
кранов
и
др.
представляют
значительные
трудности
при
моделировании. Оценить их податливость удается весьма редко, да и сама эта
оценка может быть практически проведена лишь в эксперименте. Надёжных
расчётных методов для получения таких оценок в настоящее время почти не
существует либо они не известны автору настоящей работы. Поэтому автор был
вынужден
задаваться
значениями
податливостей
узловых
соединений
ориентируясь на результаты экспериментальных исследований «похожих»
конструкций.
2.4. Разработка конечно-элементных расчетных моделей грузоподъемных
кранов
2.4.1. Кратко об объектах моделирования
1. Мостовые краны общепромышленного назначения представляют собой
наиболее многочисленный перечень машин грузоподъемностью до 600 т.
Исследованию в настоящей работе подверглись двухбалочные мостовые краны
г/п 15/3 т пролётом 22,5 м производства Узловского машиностроительного завода.
2. В качестве портальных кранов рассмотрен кран «ABUS» г/п 10 т
производства Кранбау Эберсвальде (ГДР) с верхним строением на поворотном
круге с центральной цапфой, наиболее сложной конструкции, по сравнению с
кранами на поворотной колонне. Известно, что листосварные м/к кранов ОАО
«Ленподъёмтрансмаш» на сепарационном круге ОПУ аналогичны кранам
«ABUS», но более просты в конструктивном исполнении.
3. В качестве исследования башенных кранов принят кран КБ-408.21 г/п 10
т производства Нязепетровского краностроительного завода.
63
Все крановые м/к объединяет:
1) аналогичные сочетания расчётных нагрузок, принимаемых согласно
ГОСТ 28609-90 [80] по исчерпанию несущей способности (1-я группа предельных
состояний);
2) установка кранов на КРП (надземных и наземных);
3)
пространственные,
как
правило,
сварные
м/к,
представленные
тонкостенными балочными элементами, работающими в условиях сложного
сопротивления, открытого и замкнутого профиля;
4) относительная регулярность решётчатых м/к портальных и башенных
кранов,
использующих
в
узлах
разъёмные
(болтовые
и
шарнирные
(цилиндрические)) и неразъемные (сварные) соединения, представляющие
определённые сложности для процесса конечно-элементного моделирования;
5) наличие нелинейных факторов, прежде всего, (а) сухого трения качения и
скольжения ходовых колёс кранов в зонах опирания на КРП, и также (б)
включающихся связей, в частности, реборд ходовых колес в режиме движения
кранов. Кроме того, (в) учёт физически нелинейного деформирования материала
буферов кранов и амортизаторов их тупиковых упоров в условиях динамического
нагружения. Очевидно, к нелинейным факторам расчетных моделей следует
отнести (г) односторонние связи стальных грузовых и (др.) вантовых канатов КБС
кранов;
6) установление в конструктивно-технических системах м/к кранов их
несущих
расчетных
элементов,
участвующих
как
в
перераспределении
внутренних усилий, обусловленных действием расчётных сочетаний нагрузок, так
и в изменении схемы передачи усилий
при различных эксплуатационных
состояниях подъемных сооружений;
7) несущие элементы м/к подвергаются геометрическому моделированию, в
основе которого тонкостенные стержни представляются стержневыми КЭ,
соединенными в узлах (u), а оболочечные стержни, как правило, замкнутого
профиля представляются конечно-элементным набором разного рода пластин
либо пространственных трехмерных многоузловых КЭ.
64
8) наконец, по мнению автора, справедливо важное предостережение,
связанное с процедурой идеализации нагрузок, действующих на кран в различных
режимах его работы, поскольку, как предостерегают авторы [63], особенно много
ошибок в процессе идеализации нагрузок совершается в части описания их
поведения во времени, что приводит к недостоверной картине динамического
поведения системы. Именно в динамике наиболее ярко проявляется обратная
связь между нагрузкой и крановым сооружением, когда его поведение меняет сам
характер динамически приложенных нагрузок, в частности, отклонение груза на
канатном подвесе от вертикали, отрыв ходовых колес стреловых портальных и
башенных кранов от КРП при наезде на ударные и безударные ТУП и др.
2.4.2. Разработка расчетной модели мостового крана
Мостовой двухбалочный кран общего назначения зав. №5-546, рег.№39038
(ЗАО «Узловский машиностроительный завод», г.и. 1975) (рис.2.2) предназначен
для
выполнения массовых погрузочно-разгрузочных работ в открытых и
закрытых помещениях складского типа, для монтажных работ в ремонтных цехах
и предприятиях, для осуществления транспортных погрузочно-разгрузочных
работ с грузами массой до 15 т. Кран предназначен для работы при температуре
окружающего воздуха от -40 до +40°С. Мостовой двухбалочный кран является
грузоподъемным
сооружением
состоящим
из
пролетных
балок
моста
оборудованным двумя механизмами передвижения мостового крана, концевых
балок, грузовой крановой тележки, оснащенной механизмом подъема и
передвижения. Основные характеристики крана представлены в табл. 2.1.
65
Рис.2.2. Мостовой двухбалочный кран зав.№5-546 рег.№39038 г/п 15/3 т (ОАО
ПСК «Строитель Астрахани»)
Таблица 2.1. Основные характеристики мостового крана г/п 15/3 т рег.№39038
Наименование параметра
Значение
Год выпуска
1975 г.
Заводской номер Узловского машиностроительного завода
№5-546
Регистрационный номер Ростехнадзора
№39038
Грузоподъемность, т
15/3
Пролет, м
22,5
Максимальная высота подъема груза, м
12
Группа режима работы крана А5 по ИСО 4301/1-86
Средний
Скорости механизмов:
Подъема груза, м/с
0,13/0,31
Передвижения крана, м/с
1,3
Передвижения грузовой тележки, м/с
0,65
Масса крана, т
25,8
Данные о материале:
металлоконструкций
Вст3 пс2 ГОСТ 380-71
Грузовой канат механизма главного подъема
dк=17,5мм ГОСТ 2688-80
Грузовой канат механизма вспомогательного подъема
dк=13,5мм ГОСТ 7668-80
Допустимая минимальная температура
– 40°С
66
С целью построения РМ мостового двухбалочного крана были выполнены
замеры несущих м/к и эскизирование конструктивных элементов мостового крана
№5-546, рег.№39038 принадлежащего ОАО ПСК «Строитель Астрахани»
расположенного в г. Астрахани (см. рис. 2.2). Построение РМ мостового крана
проводилось в программе ANSYS. М/к моста крана состоит из двух главных
балок коробчатого сечения 1185x550мм пролетом 22500 мм с концевыми сходами
к концевым балкам, внутри которых расположены диафрагмы (см. рис. 2.2).
Расстояние между главными балками (колея грузовой тележки) составляет 2000
мм. Для
точного
моделирования
действительной конструкции крана и
определения НДС м/к крана, каждая главная балка, как тонкостенный коробчатый
стержень,
смоделирована
4827
четырехсторонними
четырехузловыми
пластинчатыми КЭ (рис. 2.3). По всей длине верхних поясов каждой главной
балки крана расположены подтележечные рельсы (см. рис. 2.3а). Для того чтобы
точно смоделировать взаимодействие колес грузовой тележки с подтележечными
рельсами, использовались объемные КЭ.
а
б
Рис.2.3. Конечно-элементная модель главной балки мостового крана: а-общий
вид: 1- главная балка; 2-подтележечный рельс; б - в разрезе: 3 –диафрагма
67
Таким образом, каждый подтележечный рельс был смоделирован 492
гексаэдрическими восьмиузловыми объемными КЭ. В местах промежуточных
скреплений каждого рельса с верхним поясом главной балки моста были
наложены жесткие связи. Аналогично были смоделированы и надземные КРП, где
число объемных КЭ каждой нитки на длине 22000 мм составляет 451. Концевые
балки м/к крана (см. рис.2.2) представляют собой профили коробчатого сечения
450x350мм при базе крана 5000мм с диафрагмами внутри. Каждая концевая
балка смоделирована 591 четырехсторонними четырехузловыми пластинчатыми
КЭ (рис.2.5а). В реальной конструкции мостового крана (рис.2.4) оконечности
главных балок крана жестко внахлест соединяются с концевыми при помощи
болтового и сварного соединения. Для того чтобы смоделировать такое же
соединение, способное передавать изгибающие и крутящие моменты от кранового
моста к концевым балкам, в местах сварных соединений, в модели (рис.2.5б) были
наложены жесткие связи.
При моделировании ходовых колес мостового крана (рис.2.6) диаметром
710 мм, шириной цилиндрической поверхности качения 150 мм и толщиной
реборд 25 мм, для уменьшения числа КЭ и, соответственно, сокращения
расчетного времени, ходовые колеса моделировались «полуколесами»(Dхк/2),
состоящими из 636 тетраэдральных четырехузловых объемных КЭ (рис.2.7)
каждое из четырех, жестко закрепленными к нижней части м/к концевых балок
мостового крана. Нелинейное взаимодействие
между незаторможенными
крановыми колесами и подкрановыми рельсами типа Р-65 в РМ моделируется
поверхностями трения с коэффициентами трения качения (µк) в продольном
направлении, скольжения (µс) в поперечном направлении и вертикальным
контактным давлением, расчеты и значения которых были приняты по [23]. Таким
образом, коэффициенты были приняты равными: µк=0,001, µс=0,18. При
назначении кинематических граничных условий учтено, что в надземных КРП
рельсы крепятся к опорным элементам. Поэтому ограничение неподвижности
было наложено по всей длине подошвы рельсов.
68
Рис.2.4. Соединение главной балки мостового крана с концевой:
1-концевая балка; 2 –главная балка; 3- болтовое и сварное соединения
а
б
Рис.2.5. Конечно-элементная модель концевой балки крана: а - концевая балка; б конечно-элементная модель соединения концевой балки с главной: 1 –концевая
балка; 2- главная балка
69
Рис.2.6. Ходовое колесо мостового крана: 1-подкрановый рельс; 2-концевая
балка; 3-букса
Рис. 2.7. Конечно-элементная модель колеса мостового крана (Dхк/2 = 355мм):
1 - колесо; 2 - подкрановый рельс; 3 – концевая балка
70
Массы двух МПК и кабины крановщика учитывались введением
дополнительных «массовых» КЭ жестко закрепленных в местах их установки.
М/к грузовой тележки мостового крана (рис.2.8) состоит из концевых
(поперечных) балок, совпадающих с направлением подтележечных рельсов,
связанных между собой продольными балками, покрытых настилом, на котором
расположены механизм передвижения грузовой тележки и механизм подъема
груза (главный и вспомогательный).
б
а
в
Рис.2.8. Грузовая тележка мостового крана: а – общий вид; б-ходовое колесо
грузовой тележки: 1- ходовое колесо (Dхк=320 мм); 2-подтележечный рельс;
3-главная балка моста; 4-настил тележки; 5-продольная балка тележки;
6-тупиковый упор тележки; в - крюковая подвеска с элементами канатноблочной системы мостового крана: 1-грузовые канаты (Dкан=17,5 мм); 2-блочная
обойма крюковой подвески; 3-крюк; 4-кольцо стропа.
71
М/к грузовой тележки, за исключением ходовых колес, смоделирована 307
четырехсторонними четырехузловыми пластинчатыми КЭ (рис.2.9). Ходовые
колеса
грузовой
тележки
(см. рис.2.8б) диаметром
320
мм, шириной
цилиндрической поверхности качения 80 мм и толщиной односторонней реборды
20 мм, также как и ходовые колеса мостового крана (см. рис. 2.7), моделировались
«полуколесами» (Dхк/2), жестко закрепленными к нижней части поперечных балок
м/к
грузовой
тележки.
При
этом
каждое
колесо
смоделировано
345
тетраэдральными четырехузловыми объемными КЭ (см. рис.2.9).
Механизмы подъема груза и передвижения грузовой тележки, для учёта
инерции маховых масс, смоделированы 5 стержневыми КЭ (см. рис.2.9).
Для всей м/к мостового крана и его грузовой тележки в качестве материала
была принята сталь Ст3пс по ГОСТ380-94 с пределом текучести 250 МПа, для
ходовых колес – сталь Ст 35Л, для рельс – сталь Ст65Г.
При моделировании канатно-блочной системы (рис.2.8в), для уменьшения
вычислительного времени, были введены упрощения. Так, три стальных каната
полиспаста (Dкан=17,5 мм) были сведены к одному канату (Dкан= 52,5 мм), что
было достигнуто путем использования эквивалентной площади трех канатов (см.
рис. 2.9). Таким образом, грузовые канаты смоделированы 97 трехмерными
двухузловыми стержневыми КЭ основанными на теории упругих стержней по
Тимошенко, имеющими круглое поперечное сечение. Каждый дискретный узел
стержневого конечного элемента каната имеет по 6 степеней свободы.
Механические свойства материала каната были приняты по ГОСТ 3077-80
[91]. В РМ мостового крана необходимо было также учесть и тот факт, что в
действительности канат не является стержнем сплошного сечения, а представляет
собой витые стальные пряди из проволок с модулем упругости Eкан = 1·105 МПа.
В местах присоединения каната к барабану механизма подъема груза,
установки блоков канатно-блочной системы и присоединения стропных ветвей
канатов к транспортируемому грузу были наложены связи свободного вращения.
72
Рис.2.9. Конечно-элементная модель грузовой тележки мостового крана: 1механизмы подъема груза и передвижения грузовой тележки; 2-настил тележки;
3-продольная балка; 4- концевая (поперечная) балка; 5- ходовое колесо (Dхк/2 =
160 мм); 6 – грузовой канат; 7-стропа; 8- транспортируемый груз
73
Транспортируемый груз (различных грузовых состояний mгр = 1т, 8т, 15т)
смоделирован одним гексагональным объемным конечным элементом для учета
массовой инерции (см. рис.2.9).
Крановое буферное устройство представляет собой два резиновых буфера
БР-200 длиной 180 мм и диаметром в основании 200 мм (рис 2.11 а). М/к
тупиковых упоров (ТУП) (рис.2.11 б) представляют собой стальные двутавровые
профили 820x1900 мм, жестко прикрепленные с помощью сварного соединения к
подрельсовым балкам кранового рельсового пути. На высоте 1700 мм от
основания, к одной из вертикальных полок двутаврового профиля м/к ТУП, с
помощью
болтовых
соединений
прикреплен
прямоугольный
деревянный
(резиновый) амортизатор 600x400x100 мм. Для точного моделирования поведения
резинового буфера в процессе наезда мостового крана на ТУП, каждый буфер был
смоделирован 6150 тетраэдральными четырехузловыми объемными КЭ (рис.2.12).
Основные механические характеристики материала резинового буфера марки
7ИРП-18-1348 были приняты по ТУ 2500-376-00152106-94 [51]. Для получения
упругих характеристик материала буфера при построении его конечноэлементной модели были проведены натурные эксперименты по определению
физико-механических свойств материала буфера (см. пп. 4.1.1). Механические
свойства резинового материала буферов марки БР, полиуретанового материала
буферов производимыми такими фирмами, как «Demag», «RIW», «Wampfler»,
«BASF» и др., а также материала древесины хвойного дерева (ель) представлены
на рис. 2.10.
М/к
каждого
четырехузловыми
ТУП
тонкими
смоделирована
пластинчатыми
КЭ,
127
а
четырехсторонними
каждый
амортизатор
смоделирован 36 гексаэдральными объемными КЭ (см. рис.2.12).
Общий вид конструкционной модели мостового крана г/п 15/3 т показан на
рис.2.13 а, а полный вид конечно-элементной модели мостового крана показан на
рис. 2.13 б. Общее количество КЭ модели составляет 29681, а общее число
степеней свободы 148405.
74
а
б
в
Рис. 2.10. Механические свойства резинового материала буфера марки БР
(а), полиуретанового материала (б), а также материала амортизатора ТУП из
древесины хвойного дерева (в)
75
а
б
Рис.2.11. Крановый буфер и ТУП: а-закрепление резинового буфера БР-200 на
торце концевой балки; б - ТУП: 1-деревянный амортизатор; 2- м/к ТУП
Рис.2.12. Конечно-элементная модель резинового буфера крана и ТУП крановых
рельсовых путей: 1-буфер; 2-концевая балка; 3- ТУП; 4- амортизатор ТУП; 5крановый рельсовый путь (рельс Р-65); 6 – ходовое колесо крана
76
а
б
Рис.2.13. Мостовой кран г/п 15/3 т: а– конструкционная модель: 1- м/к крана; 2 грузовая тележка; 3 – ходовые колеса крана; 4 – буфер; 5 – ТУП; 6 –
подтележечные рельсовые пути; 7- крановые рельсовые пути; 8 – полезный груз
на гибком подвесе; б – конечно-элементная РМ мостового крана МК 15/3 т, как
система с n=148405 степенями свободы
77
В заключение следует указать, что разработка РМ г/п кранов на основе
МКЭ является неразрывной частью конечно-элементного анализа процессов
наезда г/п кранов на ТУП в соответствии с задачей поставленной в
диссертационной работе. Таким образом, разработанная РМ мостового крана г/п
15/3 т предназначена для исследования, путем проведения вычислительных
экспериментов, динамики наезда крана на ТУП с учетом переменных
эксплуатационных состояний, таких как: скорость наезда крана на ТУП, значение
длины подвеса и массы транспортируемого груза, а также, положения грузовой
тележки в пролете моста крана. В качестве начальных условий, при проведении
расчетного анализа, задается максимальная номинальная скорость движения
крана (согласно паспорту) для всей его м/к в заданном направлении (по оси Z).
Нагрузка на м/к крана задается постоянной величиной ускорения свободного
падения (g =9,81 м/c2) в выбранном направлении (по оси Y). Следует отметить,
что РМ мостового крана построена на основе трех базовых конечных элементов,
таких как балочный стержневой, пластинчатый и объемный (трёхмерный), и
таким образом, представляет собой пространственную модель со множеством
степеней свободы, отражающую действительную м/к мостового крана. Основным
преимуществом
такой
РМ
является
возможность
учёта
и
определения
действительного НДС м/к мостового крана в условиях ударного наезда крана на
ТУП. Кроме того, использование объемных конечных элементов таких, как
гексаэдр и тетраэдр, позволило точно смоделировать не только геометрические,
но и нелинейные физические характеристики резиновых буферов мостового крана
и ТУП, что, в свою очередь, дает возможность наиболее достоверно определить
действительное нагружение и работу буферов при взаимодействии мостового
крана с ТУП. Стоит также отметить, что введение ряда упрощений при
построении РМ мостового крана, прежде всего, исключение вращательных масс
механизмов, замена стальных проволочных канатов гибкими стержнями
сплошного сечения, введение в РМ отдельных жестких связей, упрощения при
моделировании канатно-блочных полиспастов и др., имели незначительное
влияние на нелинейный процесс и результат ударного нагружения м/к, буферов и
78
ТУП мостового крана, в то же время позволили в значительной степени
уменьшить число динамических степеней свободы модели и, таким образом,
создать эффективную РМ двухбалочного мостового крана г/п 15/3 т.
2.4.3. Разработка расчетной модели портального крана
Монтажный портальный кран «ABUS» (Абус) г/п 10 т зав. №51353
рег.№34323 (производства Кранбау Эберсвальде (ГДР)), г.и. 1952) (рис.2.14)
предназначен для производства монтажных и механосборочных работ на
судостроительных и судоремонтных предприятиях, а также для перегрузки
крупнотоннажных
грузов. Электрический
передвижной
полноповоротный
портальный кран «ABUS» с шарнирно-сочлененной стреловой системой (ШССС)
состоит из неповоротной части — портала на ходовых тележках и поворотной
части - верхнего строения. Обе части крана соединены между собой через опорноповоротное устройство, которое обеспечивает устойчивое положение поворотной
части крана и передает от неё нагрузки на портал. Портал представляет собой
пространственную рамную металлическую конструкцию, передвигающуюся по
наземным крановым рельсовым путям и перекрывающую железнодорожные
транспортные пути. Поворотная часть портального крана состоит из следующих
основных узлов: основной стрелы сочлененной с хоботом и жесткой оттяжкой,
установленных на поворотной раме, опирающейся на ходовые тележки с
круговым рельсом опорно-поворотного устройства с центрирующей цапфой,
кабиной крановщика и механизмами, установленными на раме: механизмом
вращения поворотной части, механизмом подъема груза, механизмом изменения
вылета стрелы, подвижным и неподвижным противовесом, и кабиной для
механизмов (машзала). Основные технические характеристики портального крана
«ABUS» представлены в табл. 2.2. С целью построения РМ портального крана
«ABUS» были выполнены замеры несущих м/к и эскизирование портального
крана «ABUS» зав. №51353 рег.№34323 принадлежащего ОАО ССЗ «Красные
Баррикады» расположенного в п. Красные Баррикады Астраханской области (см.
рис. 2.14). Построение РМ портального крана проводилось в программе ANSYS.
79
Рис. 2.14. Общий вид портального крана «ABUS» г/п 10 т зав. № 51353 рег.
№34323 на площадке судостроения ОАО «ССЗ «Красные Баррикады»»:
1- портал крана на ходовых тележках и КРП; 2 – машзал с механизмами крана;
3 – основная стрела; 4 – хобот (малая стрела); 5 – жёсткая оттяжка;
6 – кабина управления краном
80
Таблица 2.2. Основные характеристики портального крана «ABUS» г/п 10 т зав.
№ 51353 рег. №34323
Наименование параметра
Значение
Год выпуска
1952г
Заводской номер Абус Кранбау Эберсвальде
51353
Регистрационный номер Ростехнадзора
34323
Вылет стрелы, м:
- наибольший
- наименьший
Высота подъема груза, м
22
7
38
Грузоподъемность, т
10
Тип м/к крана (коробчатого сечения сварная, Ферменная,
ферменная сварная, коробчатого сечения клепанная и сварная
т.д.)
База портала, м
7,2
Колея портала, м
6
Масса крана, т
176,78
Группа классификации (режим
паспортная по ИСО 4301/1
Скорость механизмов:
работы)
крана
клепанная,
А3
подъема главного крюка, м/с
0,5
передвижения крана, м/с
0,4125
вращения поворотной части крана, об/с
0,017
Характеристики
используемого
навесного крюковая подвеска
грузозахватного устройства (грейфера, траверсы и масса
М
=
0.2,
пр.), т
грузоподъемность Q =
10
Данные о нижних пределах температур рабочего и
+40 °С
нерабочего состояния крана
-25 °С
Расчетный напор ветра рабочего состояния, Н/м2
500
Данные о материалах несущих элементов м/к
Портал - сталь St38u-2,
St38-hb-2 (Ст3пс)
Поворотная часть - сталь
St38b-2, St38b-3 (Ст3сп)
81
Портал крана «ABUS» (рис. 2.15) состоит из двух рам двутаврового
сечения, соединенных по концам между собой двумя рамно-решетчатыми
конструкциями. Решетчатая конструкция состоит из поддерживающих раскосов
имеющих сечения в виде уголков. На пространственную рамную конструкцию
установлен несущий двутавровый многогранник поддерживающий круговой
рельс опорно-поворотного устройства. К внутренним стенкам многогранника
присоединена
крестовина
из
двутавров
переменного
сечения
несущая
центрирующую цапфу. Портал опирается на рельсы четырьмя ходовыми
тележками, оборудованными каждая четырьмя ходовыми колесами, два из
которых, расположенные по двум сторонам портала, являются приводными.
Ходовые
колёса
портального
крана
диаметром
500мм,
шириной
цилиндрической поверхности качения 100 мм и толщиной реборд 25 мм
расположены в балансирах ходовых тележек (рис.2.16).
При моделировании колес ходовых тележек портального крана (см.
рис.2.16б), было важно передать действительное взаимодействие колёс с
подкрановыми рельсами, в связи с этим колеса моделировались объемными КЭ.
Для уменьшения числа КЭ и, соответственно, сокращения расчетного времени,
ходовые колеса моделировались «полуколесами» (Dхк/2), состоящими из 523
тетраэдральных четырехузловых объемных КЭ каждое, закрепленными в м/к
ходовых тележек портального крана (рис.2.17). Ходовые тележки смоделированы
пластинчатыми и стержневыми КЭ, имеющими коробчатые и круглое сечения.
Каждая ходовая тележка смоделирована 5539 КЭ.
балансиров
В местах соединения
с главными балками опор портала крана, соединения тележек с
балансиром наложены связи свободного вращения (см. поз.5 рис. 2.16б).
82
аа
бб
Рис.2.15. Общий вид портала портального крана «ABUS» г/п 10 т зав. № 51353
рег. №34323: 1- поддерживающие раскосы;2-крестовина;3-несущий
многогранник: а-вид на портал вдоль КРП; б – тоже, по стрелке «А»
83
а
б
Рис. 2.16. Ходовые тележки портального крана «ABUS» г/п 10 т зав. №
51353 рег. №34323: а – общий вид ходовой части крана; б- ходовая тележка:
1-стяжка опор портала; 2 – КРП; 3 – колесо ходовой тележки; 4- МПК;
5 – флюгер ходовой тележки
84
Рис. 2.17. Конечно-элементная модель ходовой тележки портального крана
«ABUS» г/п 10 т: 1 – ходовая тележка; 2- флюгер главного балансира ходовой
тележки; 3-ходовое колесо (Dхк/2 = 250 мм); 4 – КРП; 5- буфер крана
Нелинейное взаимодействие
подкрановыми
рельсами
в
РМ
между колесами ходовых тележек и
портального
крана
смоделировано
коэффициентами трения качения (µк) в продольном направлении, скольжения (µс)
в поперечном направлении и вертикальным контактным давлением, расчеты и
значения которых были приняты по [23]. Коэффициенты приняты равными:
µс=0,18, µк=0,001. В качестве материала колес ходовых тележек крана была
принята, согласно паспорту крана, сталь Ст 35Л, а для подкрановых рельс была
принята сталь Ст65Г.
Портал портального крана смоделирован 16372 тонкими пластинчатыми
четырехузловыми КЭ и стержневыми КЭ (рис.2.18). Пластинчатые КЭ имеют по 5
степеней свободы на каждом узле: перемещения узла конечного элемента в
направлениях осей x,y,z МСК и вращения из плоскости пластины, вокруг осей x и
y, за исключением оси z.
85
Рис.2.18. Конечно-элементная модель портала портального крана «ABUS» г/п
10т: 1- ходовые тележки; 2 - поддерживающие раскосы;3 – портал; 4-несущий
многогранник; 5-крестовина; 6 –центрирующая цапфа; 7 – буфер крана; 8 – КРП
86
Крановое буферное устройство представляет собой два резиновых буфера
БР-200 длиной 180 мм и диаметром на основании 200 мм (рис 2.19).
М/к ТУП представляют сборно-сварную конструкцию, состоящую из
стального корпуса, свариваемого из 2-х щек 880x585 мм, упорной пластины
700x400x10 мм и 2-х планок 100x90 мм. Корпус ТУП устанавливается на
подкрановый рельс и крепиться к нему четырьмя шпилечными соединениями
М24. Два упорных деревянных бруса 200x400 мм играющих роль амортизаторов,
устанавливаются на смонтированном корпусе ТУП с помощью четырех болтовых
соединений М22 (см. рис.2.19).
Каждый ТУП смоделирован 50 пластинчатыми КЭ и 9 гексаэдрическими
КЭ (рис.2.20).
Для точного моделирования поведения буфера в процессе наезда
портального крана на ТУП, каждый буфер смоделирован 6150 тетраэдральными
четырехузловыми объемными КЭ (см. рис.2.20). Основные механические
характеристики материала резинового буфера марки 7ИРП-18-1348 были приняты
по ТУ 2500-376-00152106-94 [51]. Описание физико-механических свойств
материала буфера приведено в пп. 4.1.1.
Для того чтобы точно смоделировать взаимодействие колес портального
крана с подкрановыми рельсами, использовались объемные КЭ. Таким образом,
каждый рельс (см. рис. 2.20 поз.6) был смоделирован 134 гексаэдрическими
восьмиузловыми объемными КЭ. Ограничение неподвижности было наложено по
всей длине подошвы рельсов.
87
Рис. 2.19. ТУП и буфер портального крана «ABUS»: 1- ТУП; 2 - ходовая тележка
крана; 3-резиновый буфер БР-200; 4- крановый рельсовый путь; 5 –амортизатор
ТУП
Рис.2.20. Конечно-элементная модель тупикового упора, буфера и подкранового
рельса портального крана «ABUS» г/п 10 т: 1 – ТУП; 2-амортизатор ТУП; 3буфер БР-200; 4-ходовая тележка крана; 5-ходовое колесо; 6-крановый
рельсовый путь
88
На круговом рельсе портала портального крана через ходовые тележки ОПУ
установлена поворотная платформа, на которой располагаются механизмы
подъема, поворота крана, кабина крановщика, подвижный противовес Q = 20 т, а
также на задней стенке машзала балласт массой 42 т. Поворотная платформа
вращается относительно портала портального крана при помощи опорных
ходовых тележек (рис.2.21).
На поворотной платформе установлена рамная м/к, состоящая из
стержневых элементов, имеющих уголковые и швеллерные сечения, к которой
прикреплен подвижный противовес массой 20 т (рис.2.22).
Верхнее строение портального крана, механизмы подъема, поворота крана
смоделирована 843 стержневыми КЭ. Балласт поворотной платформы и балласт
подвижного противовеса смоделированы 3 объемными КЭ для учета массовой
инерции. Кабина крановщика моделировалась дополнительным «массовым»
стержневым конечным элементом (рис. 2.23).
Рис.2.21. Опорные тележки поворотной части портального крана «ABUS» г/п
10 т зав. № 51353 рег. №34323: 1-ходовые тележки ОПУ; 2-круговой рельс;
3-верхнее строение крана
89
Рис. 2.22. Колонна и верхняя часть портала портального крана «ABUS» г/п 10 т:
1-поворотная платформа; 2 – машзал; 3- рамная конструкция; 4- подвижный
противовес; 5-кремольера и механизм изменения вылета стрелы
Рис. 2.23. Конечно-элементная модель верхнего строения портального крана
«ABUS» г/п 10 т: 1-барбет портала; 2- крестовина несущая центрирующую
цапфу; 3- опорные тележки поворотной части крана; 4-механизм подъема груза;
5 – балласт неподвижного противовеса; 6 - подвижный противовес на
коромысле; 7 – грузовые канаты; 8 – тяга от коромысла подвижного
противовеса к стреле; 9-зубчатая рейка МИВС
90
Стрела длинной 20,9 м, жёсткая оттяжка длиной 16,6 м и хобот длинной
13,1 м портального крана «ABUS» (рис.2.24) состоят из стержневых элементов
м/к крана, представляющие собой профили
уголковых и швеллеровых
поперечные сечений. В местах крепления стрелы к поворотной платформе
портального крана, стрелы к хоботу, оттяжки к хоботу и верхнему строению
поворотной рамы портального крана установлены шарниры вращения.
Стрела, оттяжка и хобот портального крана «ABUS» смоделированы 1815
стержневыми КЭ (рис.2.25).
Канатно-блочная система портального крана смоделирована стержневыми
КЭ, общее количество которых составило 267.
Транспортируемый груз смоделирован 1 гексагональным объемным
конечным элементом для учета массовой инерции.
Свойства материалов м/к
портального крана были приняты согласно
паспорта крана (см. табл. 2.2). В качестве материала канатов была принята сталь с
пределом текучести 1770 МПа [91]. Необходимо было также учесть и тот факт,
что в реальности канат не является полностью литым, а представляет собой витые
стальные волокна. Для этого модуль упругости каната был уменьшен до Eкан =
1·105 МПа.
В местах присоединения грузовых канатов к барабанам механизма подъема
груза (МПГ) крана, зубчатой рейки в кремальере механизма изменения вылета
стрелы крана, установки коромысла подвижного противовеса, установки
шарниров стрелы, оттяжки и хобота, установки шкивов КБС и присоединения
каната к транспортируемому грузу были наложены связи свободного вращения.
Общий вид конструкционной модели крана «ABUS» показан на рис.2.26, а
полный вид конечно-элементной модели портального крана показан на рис. 2.27.
Общее количество КЭ модели составило 54143, а общее число степеней свободы
297786.
91
Рис. 2.24. Стрела, жёсткая оттяжка и хобот портального крана «ABUS» г/п 10
т: 1- основная стрела; 2- оттяжка; 3- хобот
Рис. 2.25. Конечно-элементная модель стрелы, оттяжки и хобота портального
крана «ABUS» г/п 10 т: 1-стрела; 2-оттяжка; 3-хобот; 4-грузовой канат
92
Рис.2.26. Конструкционная модель портального крана «ABUS» г/п 10т: 1портал; 2- стрела;3-хобот;4-оттяжка; 5-подвижный противовес на коромысле;
6-балласт неподвижного противовеса;7-поворотная платформа; 8-ходовая
тележка крана; 9-буфер;10- ТУП; 11- подкрановый рельс; 12- грузовой канат;
13 – транспортируемый груз
93
Рис.2.27. Конечно-элементная РМ портального крана «ABUS» г/п 10т с
n=297786 степенями свободы
94
В заключение отметим, что РМ портального крана «ABUS» г/п 10 т
разработанная на основе МКЭ предназначена для проведения вычислительных
экспериментов по изучению процессов наезда портального крана на ТУП при
различных эксплуатационных состояниях, таких как: скорость наезда крана на
ТУП, расположение транспортируемого груза на вылете стрелы, высоте подвеса и
переменной массе транспортируемого груза, а также при различных положениях
стрелы крана по отношению к направлению рельсового пути. РМ портального
крана, построенная на основе трех базовых конечных элементов: стержень,
пластина и объемный конечный элемент, представляет собой модель со
множеством (n) степеней
свободы
и с
возможностью
МКЭ отражает
действительную пространственную м/к портального крана. Стоит отметить, что,
как
и
для
мостового
крана,
рассмотренного
выше,
описание
точных
геометрических и физических свойств в конечно-элементной модели резиновых
буферов
портального
крана
является
важным
для
определения
их
действительного НДС, в связи с чем, при моделировании буферов портального
крана и ТУП использовались объемные конечные элементы. Ряд упрощений,
введенных при построении конечно-элементной РМ портального крана (см. рис.
2.27), позволили создать расчетно-эффективную конечно-элементную модель для
проведения вычислительного расчетно-динамического анализа процесса наезда
портального крана «ABUS» г/п 10 т на ТУП.
2.4.4. Разработка расчетной модели башенного крана
Передвижной на рельсовом ходу башенный кран КБ-408.21 г/п 10 т, зав.№
665 рег. № 39340 (ЗАО «Нязепетровcкий краностроительный завод», г.и. 2008г.)
(рис.2.28) предназначен для механизации строительно-монтажных работ в
жилищном и гражданском строительстве при возведении сооружений высотой до
72,7 м из монтируемых элементов зданий и сооружений массой до 10т.
Кран предназначен для работы при температуре окружающего воздуха от 40 до +40°С. Группа классификации (режима) - А4 по ИСО 4301/1-86.
95
Башенный
кран
КБ-408.21
является
строительным
передвижным
полноповоротным краном на рельсовом ходу с поворотной башней и балочной
стрелой с передвигающейся по стреле грузовой тележкой, обеспечивающей
вертикальную и горизонтальную транспортировку строительных деталей и
материалов. Кран перевозится с объекта на объект в разобранном виде. Монтаж
осуществляется
собственными
механизмами
и
с
помощью
монтажного
автомобильного крана.
Основные характеристики башенного крана КБ-408.21 представлены в табл.
2.3.
С целью построения РМ башенного крана КБ-408.21 были выполнены
замеры несущих м/к и эскизирование башенного крана КБ-408.21 зав.№ 665 рег.
№ 39340 принадлежащего ОАО ПСК «Строитель Астрахани» расположенного в г.
Астрахани (см. рис. 2.28). Построение РМ башенного крана проводилось в
программе ANSYS.
Ходовая неповоротная рама башенного крана КБ-408.21 (рис.2.29) состоит
из
кольцевой
коробчатой
балки,
к
которой
прикрепляются
радиально
расположенные кронштейны (флюгеры). Радиальные кронштейны выполнены в
виде коробчатых сварных балок переменного сечения, к оконечностям которых с
помощью шкворней прикреплены ведущие и ведомые ходовые тележки крана.
Поворотная платформа башенного крана КБ-408.21 (см. рис.2.29) состоит из
двух главных балок присоединенных встык к центральной кольцевой балке,
вращающейся
относительно ходовой рамы. На платформе установлены
механизмы подъема груза и изменения вылета стрелы, электроаппаратура
управления краном и противовес, а также приспособления для монтажа башни и
стрелы (см. рис.2.29).
Конструкция
ходовых
представлена на рис. 2.30.
тележек
башенного
крана
КБ
-
408.21
96
Рис.2.28. Башенный кран КБ-408.21 зав.№665 рег.№ 39340 г/п 10 т в условиях
ОАО «Строитель Астрахани» (г. Астрахань)
97
Таблица 2.3. Основные характеристики башенного крана КБ-408.21 г/п 10т зав.
№665 рег.№ 39340
Наименование параметра
Значение
Год выпуска
2008
Заводской номер Нязепетровского краностроительного
завода
Регистрационный номер Ростехнадзора
665
Исполнение крана
39340
КБ-408.21-02
Грузоподъемность, т
10
Грузовой момент, тм
160
Вылет стрелы, м
40
Суммарная мощность эл. двигателей, кВт
123
Частота вращения башенного крана, об./c
0,01
База башенного крана, м
7,5
Колея, м
7,5
Высота подъема крюка, м
54,0-72,7
Скорость:
Подъема (опускания) груза, м/c
0,5; 0,75
Посадки груза, м/c
0,08
Передвижения башенного крана, м/c
0,3
Передвижения грузовой тележки, м/c
0,5; 0,15
Масса крана, т
Масса неподвижного противовеса
поворотной раме крана, т
Высотная отметка шарнира стрелы, м
Сейсмичность
56,7
(балласта)
на
45
56.6
до 6 баллов по СНиП
II-7-81*
Ветровой район (в зависимости от исполнения крана) по III (для исполнения
СНиП 2.01.07-85. «Нагрузки и воздействия» [35].
02)
Материал несущих м/к:
- сталь 09Г2С ГОСТ 19282-73, предел текучести, МПа
v=320
- сталь 20В ГОСТ 8731-74, предел текучести, МПа
v= 250
- сталь Вст3пс5, предел текучести, МПа
v= 245
98
а
б
Рис.2.29. Ходовая рама и поворотная платформа крана КБ-408.21: а-общий вид:
1-балласт; 2- поворотная платформа; 3- ходовая рама; 4-ходовые тележки; бвид с размерами
99
Рис. 2.30. Ходовая тележка башенного крана КБ-408.21: 1 – флюгер
неповоротной рамы; 2 – ось навески ХТ; 3 – противоопрокидывающее
устройство ХТ, не препятствующее рабочим движениям; 4 – ось шквореня ХТ;
5 – МПК
100
При моделировании ходовых колес крана, установленных на ходовых
тележках башенного крана (см. рис.2.30), диаметром 500 мм, шириной
цилиндрической поверхности качения 100 мм и толщиной реборд 25 мм, было
важно передать действительное взаимодействие колёс с подкрановыми рельсами,
в связи с этим колеса моделировались объемными КЭ. Для уменьшения числа КЭ
и,
соответственно,
сокращения
расчетного
времени,
ходовые
колеса
моделировались «полуколесами» (Dхк/2), состоящими из 523 тетраэдральных
четырехузловых объемных КЭ каждое (рис.2.31), закрепленными в м/к ходовых
тележек башенного крана.
Рис. 2.31. Конечно-элементная модель ходовой тележки башенного крана КБ408.21: 1-ходовое колесо (Dхк/2 = 250 мм); 2-ходовая тележка; 3-спаренный
цилиндрический шарнир; 4 – КРП; 5 – оси горизонтального шарнира; 6 – тоже,
вертикального
101
Ходовая рама и поворотная платформа смоделированы 6596 тонкими
пластинчатыми четырехузловыми КЭ (рис.2.32),
имеющими по 5 степеней
свободы на каждом узле: перемещения конечного элемента в направлениях осей
x,y,z МСК и вращения вокруг осей y и z за исключением оси x.
Для учета массовой инерции балласта башенного крана, последний
смоделирован 5 гексагональными объемными КЭ. Механизмы подъема груза и
передвижения
крана,
а
также
стержневая
м/к
поворотной
платформы,
смоделированы 35 стержневыми КЭ имеющими по 6 степеней свободы в каждом
узле: перемещения в узлах конечного элемента в направлениях осей x,y,z МСК и
вращения вокруг осей x, y, z. Шкафы электро-коммутаций системы управления
краном смоделированы 12 четырехузловыми пластинчатыми КЭ (см. рис.2.32 поз.
7).
Рис.2.32. Конечно-элементная модель ходовой рамы и поворотной платформы
крана КБ-408.21: 1-ходовая тележка; 2-флюгер; 3-неповоротная платформа; 4 –
поворотная платформа; 5 –балласт; 6-механизмы подъема груза и изменения
вылета стрелы ; 7- шкафы электро-коммутаций; 8 - КРП; 9-ось вращения крана
102
Для того чтобы точно смоделировать взаимодействие колес ходовых
тележек крана с подкрановыми рельсами, использовались объемные КЭ. Каждый
рельс на длине 10 м был смоделирован 288 гексаэдрическими восьмиузловыми
объемными КЭ (рис. 2.33 б). Ограничение неподвижности было наложено по всей
длине подошвы рельсов.
Безударные ТУП, представляющие собой жёсткие сварные конструкции из
стальных листов толщиной 6 мм (см. рис. 2.33), смоделированы пластинчатыми
КЭ. Каждый тупиковый упор смоделирован 324 пластинчатыми КЭ с общим
количеством узлов 331.
а
б
Рис.2.33. Подкрановый рельс и безударный тупиковый упор: а - действительная
конструкция; б - конечно-элементная модель: 1-рельс; 2 – ТУП; 3 – крепление
безударного ТУП к рельсу
103
В качестве материала подкрановых рельс была принята сталь Ст65Г, для
ТУП – сталь 09Г2С. В качестве материала колес ходовых тележек была принята
сталь Ст 35Л.
Нелинейное взаимодействие
между колесами ходовых тележек и
подкрановыми рельсами в РМ башенного крана смоделировано поверхностями
трения с коэффициентами трения качения (µк) в продольном направлении,
скольжения (µс) в поперечном направлении и вертикальным контактным
давлением, расчеты и значения которых были приняты по [23]. Таким образом,
коэффициенты были приняты равными: µс=0,18, µк=0,001.
В местах осей навески ходовых тележек и соединения ходовых тележек с
флюгерами ходовой рамы были наложены связи свободного вращения.
Несущая м/к башни крана КБ-408.21 представлена на рис. 2.34 - 2.35,
имеющая монтажно - модульную конструкцию, состоящую из 7 секций.
Конструкция башни башенного крана КБ-408.21 состоит в основном из
стержневых трубчатых элементов, поэтому конечно-элементная модель башни
полностью смоделирована стержневыми КЭ имеющими круглое и коробчатое
поперечное сечение. Общее количество стержневых КЭ составило 744, а число
узлов 1071. Кабина крановщика смоделирована 6 пластинчатыми КЭ (рис.2.36).
Секционная несущая м/к стрелы из труб крана КБ-408.21 представлена на
рис. 2.37-2.38. Конструкция стрелы выполнена из металлических труб в виде
решётчатой конструкции, модули секций стрелы соединяются между собой с
помощью
болтовых
фланцевых
соединений.
Вылет
крюковой
подвески
изменяется путём перемещения по нижним поясам стрелы грузовой тележки.
В местах соединения стрелы с башней были наложены связи свободного
вращения (шарниры вращения).
104
а
б
Рис. 2.34. Навеска корзины башни на поворотную раму (платформу): а – общий
вид; б – оголовок корзины под башню: 1 – поворотная платформа; 2 – корзина; 3
– подкосы; 4 – люлька корзины; 5 – башня
105
а
б
Рис. 2.35. Оголовок башни крана КБ-408.21 над шарниром стрелы: а – общий вид
оголовка; б – раскосы решетки оголовка: 1 – грузовой канат; 2 – грузовая
тележка (на стреле)
106
Рис.2.36. Конечно-элементная модель м/к башни башенного крана КБ-408.21:
1-башня; 2-корзина; 3-оголовок башни
107
Рис. 2.37. Общий вид (сверху) стрелы крана КБ-408.21 длиной 38,4м: 1 – м/к
стрелы Lстр = 40 м; 2 – грузовой канат dк=24мм; 3 – канаты стрелового расчала
dк=32мм
Рис. 2.38. Грузовая тележка (каретка): 1 – грузовая тележка; 2 – стрела;
3 – грузовой канат
108
Рис.2.39. Конечно-элементная модель м/к стрелы башенного крана КБ-408.21:
1-стрела; 2-грузовая тележка; 3-грузовой канат; 4-канат стрелового расчала
Конечно-элементная модель стрелы башенного крана (рис.2.39) состоит из
260 стержневых КЭ и 367 узлов.
Канатно-блочная система
смоделирована стержневыми КЭ. Общее
количество КЭ составило 103. Транспортируемый груз смоделирован 1
гексагональным объемным конечным элементом для учета массовой инерции.
Свойства материалов м/к всего крана были приняты согласно табл. 2.3. В
качестве материала канатов была принята сталь с пределом текучести 1770 МПа
[91]. Модуль упругости стали был уменьшен до E = 1·105 МПа.
В местах присоединения канатов к барабанам МПГ крана, механизма
изменения вылета стрелы крана, механизму передвижения
грузовой тележки
(каретки), в осях установки блоков и присоединения грузовых канатов к
транспортируемому грузу были наложены связи свободного вращения.
Общий вид конструкционной модели КБ-408.21 показан на рис.2.40, а
полный вид конечно-элементной модели башенного крана показан на рис. 2.41.
Общее количество КЭ модели составляет 11857, а общее число степеней свободы
54765.
109
Рис.2.40. Конструкционная модель башенного крана КБ-408.21: 1- ходовая рама;
2- поворотная платформа;3-башня;4-стрела; 5-канат грузовой; 6-канат
стрелового расчала;7-канат стрелового полиспаста; 8-расчал обоймы МИВС;
9-противовес;10- грузовая тележка; 11- подвеска крюковая; 12- кабина
машиниста; 13 - ходовая тележка; 14-безударные ТУП; 15 – подкрановый рельс;
16-полезный груз
110
Рис.2.41. Конечно-элементная модель башенного крана КБ-408.21, как система с
n = 54765 степенями свободы
111
В заключение укажем, что разработанная РМ башенного крана КБ-408.21
г/п 10 т (см. рис. 2.41) на основе МКЭ предназначена для проведения
вычислительных
экспериментов
для
изучения
процессов
взаимодействия
башенных кранов с безударными ТУП при различных эксплуатационных
состояниях крана, таких как: скорость наезда крана на безударные ТУП, масса,
высота подвеса и расположение грузовой тележки с транспортируемым грузом на
стреле крана, расположение поворотной части крана по отношению к
направлению его рельсового пути. РМ башенного крана построена на основе трех
базовых конечных элементов: стержень, пластина и объемный конечный элемент
и представляет собой пространственную конечно-элементную модель n = 54765
степеней свободы, отражающую в рамках возможностей МКЭ действительную
м/к башенного крана КБ-408.21 г/п 10 т. Ещё раз стоит подчеркнуть, что
разработанная РМ башенного крана является пространственной, что является
важным для определения деформационного состояния м/к крана и характеристик
устойчивости башенного крана в пространстве при наезде на безударные ТУП.
Конечно-элементная пластинчатая модель безударных ТУП также отражает их
действительную м/к, что является важным для описания процесса взаимодействия
колес башенного крана с безударными ТУП. Стоит отметить, что введение ряда
упрощений при построении РМ башенного крана КБ-408.21 г/п 10 т, прежде
всего, исключение вращательных масс механизмов, замена податливых связей
кольца ОПУ жёсткими (в предположении его незначительного износа),
вращающихся ходовых колёс крана телами качения и скольжения в зоне их
контакта с рельсовыми путями, позволило в значительной степени уменьшить
число степеней свободы РМ и, таким образом, создать эффективную РМ
башенного крана КБ-408.21 г/п 10 т.
112
2.5. Выводы к главе 2
1. Как указывают авторы [63], практические затруднения проведения
детальных нелинейных расчетов (применительно к наезду кранов на ударные и
безударные ТУП) не означают следованию отказа от выполнения такого типа
исследований. Здесь автор придерживался стратегии выполнения тщательного
анализа
РМ
кранов
на
уровне
сложности,
доступной
современной
вычислительной технике [92] и сопоставления результатов вычислительного
эксперимента с натуральным экспериментом;
2. Выполненные исследования по конечно-элементному моделированию
грузоподъемных кранов в рамках теории МКЭ основывались на компромиссе
между детализацией и сложностью моделей, с позиций обозримой эффективности
и достижения точности решения поставленной в диссертации задачи и
стремлением автора к упрощению РМ при дискретизационной разбивке
континуальных м/к кранов на многочисленные конечные элементы, поскольку
точность решения задачи предположительно может понизиться с возрастанием
числа степеней свободы моделей;
3. В условиях рамочного конечно-элементного перехода от действительных
конструкций кранов к их РМ, представленным теперь в виде базовых КЭ типа
балочный стержень, пластина, либо трёхмерный объемный элемент, не
исключается интуитивный подход, при котором первым мотивом принятия
решений служили геометрические соображения, дополнением к которым являлся
выбор одной из стандартизированных идеализаций как геометрии конструкции,
так и свойств материалов конструкции ( упругих, нелинейно-упругих и др.);
4. Физико-механические свойства каждого конечного элемента РМ кранов
приняты в соответствии с паспортными данными кранов о материалах их
несущих элементов м/к. Резиновые буфера г/п кранов смоделированы объемными
нелинейными КЭ с соответствующими нелинейно-упругими и демпфирующими
характеристиками, полученными в результате натурных экспериментов по
определению физико –механических свойств буферов (см. гл. 4).
113
5. По причине сложных конструкционных систем реальных г/п кранов в их
РМ были приняты некоторые упрощения для уменьшения расчетного времени. В
частности, из РМ были исключены вращательные массы механизмов. При этом
нелинейные взаимодействия между ходовыми колесами г/п кранов (тележек) и
подкрановыми (подтележечными) рельсами моделировались согласно закону
Кулона поверхностью трения с соответствующими
коэффициентами трения
качения и скольжения. Помимо этого, из конечно-элементной модели мостового
крана исключено влияние на работу крана поддерживающих конструкций,
несущих надземные крановые рельсовые пути.
6. РМ кранов построены для проведения вычислительных экспериментов по
изучению процессов наезда г/п кранов на ударные и безударные ТУП при
различных эксплуатационных состояниях наезда кранов, таких как: масса
транспортируемого груза;
длина подвеса транспортируемого груза; величина
вылета стрелы или положение грузовой тележки в пролете моста крана;
расположение поворотной части крана вдоль (перпендикулярно) направлению
движения крана по КРП; скорость наезда крана на ТУП.
вычислительных экспериментов приведены в гл. 3.
Результаты
114
Глава 3. Численное исследование динамических процессов наезда
грузоподъёмных кранов на тупиковые упоры
3.1. Расчетный динамический анализ процесса взаимодействия мостовых
кранов с ударными тупиковыми упорами*
3.1.1. Определение НДС металлоконструкций мостовых кранов в процессе их
наезда на тупиковые упоры
Последствия ненормированного нагружения м/к мостовых кранов в
процессе их наезда на ударные ТУП, следуя работам [4,8,10,11,12,13,14,15,16],
остаются практически неизвестными. Очевидно, поэтому НДС м/к мостовых
кранов при их наезде на ТУП остается определенным лишь приближенными
методами. При этом в процессе экспертных обследований мостовых кранов г/п от
10 т до 100 т были выявлены многочисленные остаточные поперечные
деформации главных балок м/к мостовых кранов в горизонтальной плоскости,
которые могли носить отпечаток ударного взаимодействия мостовых кранов c
ТУП (рис.3.1). Для исследования воздействия ударного нагружения м/к мостового
крана в процессе его наезда на ударные ТУП на основе созданной нелинейной РМ
мостового крана г/п 15/3 т (см. рис.2.13) были проведены серии вычислительных
экспериментов в программе ANSYS. Моделирование процесса наезда мостового
крана на ТУП проводилось в предположении аварийного наезда крана на ТУП
(например, в случае отказа приборов и устройств безопасности (выключающих
линеек), либо отказа тормозных систем) с различной скоростью (Vкр = 1,3 м/с, 1,2
м/мин, 1,1 м/с), при разных положениях грузовой тележки в пролете моста (1/2,
2/3Lпр), переменных значениях длины подвеса (Lп = 2м, 4м, 6м) и массы
транспортируемого груза (mгр = 1т, 8т, 15т). Начальное расстояние от буферов
крана до ТУП составляло 30 мм.
*
Работа выполнялась в соответствии с госбюджетной темой в плане научно-исследовательской работы
Астраханского государственного технического университета на кафедре «Подъемно-транспортные машины» на
2012-2013 гг. «Расчетно-экспериментальное исследование безопасной эксплуатации мостовых кранов при
взаимодействии с тупиковыми упорами», номер государственной регистрации № 01201179194.
115
а
б
Рис.3.1. Горизонтальные остаточные деформации главных балок м/к мостовых
кранов г/п 15/3 т полученные при экспертном обследовании в условиях ОАО ПСК
«Строитель Астрахани»: а-мостовой кран зав. №5-546, рег.№39038 с главными
балками соединенными внахлест с концевыми; б- мостовой кран зав. №6860,
рег.№39039 с главными балками соединенными встык с концевыми
116
В результате серии вычислительных экспериментов удалось получить на
временной оси полную картину НДС м/к мостового крана в процессе его ударного
взаимодействия с ТУП [93]. Меняя массу и длину подвеса транспортируемого
груза,
положение грузовой тележки в пролете моста, скорость крана, были
получены различные значения эквивалентных напряжений (по теории фонМизеса) возникающие в м/к мостового крана в процессе его наезда на ТУП.
Проанализировав все полученные значения напряжений было установлено, что их
максимальные значения возникают в местах соединения главных балок крана с
концевыми (прежде всего зоны 2,3,6,7), причем наибольшие из них оказались в
зонах 2 и 6 м/к мостового крана (рис. 3.2.).
Графики изменения значений напряжений в наиболее нагруженных зонах
соединения главных балок с концевыми в процессе ударного наезда мостового
крана г/п 15/3 т на ТУП при различных эксплуатационных параметрах приведены
на рис. 3.3 - 3.6.
Рис. 3.2. Зоны (1 - 8) возникновения максимальных значений напряжений в м/к
мостового крана г/п 15/3т в процессе его наезда на ударные ТУП
117
а
б
Рис.3.3. Значения напряженного состояния м/к мостового крана в процессе его
наезда на ТУП при положении грузовой тележки в 1/2Lпр, Vкр = 1,3м/с, Lп = 2 м: а
- значения напряжений в зоне 2 (см. рис.3.2); б – значения напряжений в зоне 6
м/к крана: 1 - mгр = 15 т; 2 - mгр = 8 т; 3 – mгр = 1 т
Поскольку грузовая тележка может передвигаться по длине моста крана ее
положение в момент наезда мостового крана на ТУП может меняться. Таким
образом, влияние данного эксплуатационного параметра на результат ударного
взаимодействия крана с ТУП
должен быть исследован. Прежде всего, серия
вычислительных экспериментов была проведена при расположении грузовой
тележки посередине пролета моста, так что расстояние от ее центра до концов
главных балок составляло 11,25 м (см. рис. 3.2). Результат вычислительных
экспериментов дал практически одинаковые значения напряжений в зонах
соединений главных балок с концевыми. При этом наибольшее значение
напряжения экв = 152 МПа в зоне 2 было получено при наезде мостового крана на
118
ТУП с массой транспортируемого груза mгр = 15 т, Vкр = 1,3 м/с и Lп = 2 м.
Различие в значениях напряжений в зонах 2 и 6 составило 2%. Вероятно, такое
различие в значениях возникает по причине незначительного смещения центра
тяжести грузовой тележки из-за несимметричного расположения механизмов
передвижения и подъема груза.
Также, вычислительные эксперименты были проведены при смещении
грузовой тележки от центра моста крана на 3,75 м (2/3Lпр) с максимальными
параметрами наезда mгр = 15 т, Vкр = 1,3 м/с и Lп = 2 м.
В результате была
получена другая картина напряженного состояния м/к мостового крана (рис. 3.4),
при которой было установлено, что значения напряжений возникающих в зонах 2
и 6 м/к крана в процессе его наезда на ТУП при расположении тележки в 2/3 Lпр
отличаются друг от друга таким образом, что наибольшие напряжения возникают
в том месте соединения главной балки с концевой, к которому ближе
располагается
грузовая
тележка
(см.
рис.
3.2).
Согласно
результату
вычислительного эксперимента при наезде мостового крана на ТУП в зоне 2 м/к
крана возникают напряжения равные экв = 164 МПа (см. рис.3.4 а), что на 8%
оказалось выше значения полученного при наезде мостового крана на ТУП с
грузовой тележкой расположенной в середине моста крана. Стоит отметить, что
выявленные зоны возникновения максимальных напряжений в м/к крана (см. рис.
3.2) и некоторые их значения (см. рис. 3.4 а) согласуются с Приложением 6 ТУ
24-05-03 [94], в которых приводится характер повреждений м/к мостовых кранов.
Кроме того,
обеспокоенность проектировщиков мостовых кранов должны
вызывать обстоятельства, характеризующиеся близкими кососимметричными
колебаниями главных балок в горизонтальной плоскости при смещённой грузовой
тележке с центра пролёта на близких частотах в области ω = 10 Гц, приводящих к
циклическим переменным напряжениям в опасных зонах (см. рис. 3.4 в,г).
Из анализа изменения скорости мостового крана в процессе его наезда на
ТУП было выявлено, что кран с массой транспортируемого груза 1 т наезжает на
ТУП неустойчиво из-за его незначительной загруженности, в отличие от более
119
плавных наездов с массами груза равными 8 т и 15 т, повышающих уровень
инерционности крана.
Также были исследованы влияния и других эксплуатационных состояний на
результат НДС мостового крана в процессе наезда на ТУП, прежде всего,
значение длины подвеса транспортируемого груза и величины скорости наезда
крана на ТУП. Согласно результатам вычислительных экспериментов (рис. 3.53.6) было выявлено, что наибольшее влияние на НДС металлоконструкции
оказывает скорость наезда мостового крана на ТУП. Так, при увеличении
начальной скорости наезда крана на ТУП на 10 % (с Vкр= 1,1 м/с до Vкр = 1,2 м/с)
напряжение в зоне 2 м/к мостового крана (см. рис. 3.2) повышается на 24 % (см.
рис. 3.6). В свою очередь, уменьшение длины подвеса груза в два раза (с 4 м до 2
м) повышает напряжение в зоне 2 м/к крана на 5 % (см. рис. 3.5).
а
б
Рис.3.4 а,б. Значения напряженного состояния м/к мостового крана в процессе
его наезда на ТУП при положении грузовой тележки в 2/3Lпр,Vкр = 1,3м/с, Lп =
2м: а - значения напряжений в зоне 2 (см. рис.3.2); б- значения напряжений в зоне
6 м/к крана: 1 - mгр = 15 т; 2 - mгр = 8 т; 3 – mгр = 1 т
120
в
г
Рис.3.4 в,г. Кососимметричные формы колебаний главных балок моста, приводящие к циклическим переменным
напряжениям в опасных зонах крана: в - на частоте10,31 Гц; г - то же, на частоте 10,35 Гц
121
а
б
в
Рис.3.5. Значения напряженного состояния м/к мостового крана в процессе его
наезда на ТУП при Vкр = 1,3м/с, положение грузовой тележки в 1/2Lпр: а- mгр = 1
т; б-mгр = 8 т; в- mгр = 15 т: 1- Lп = 2 м; 2- Lп = 4 м; 3- Lп = 6 м
122
а
б
в
Рис.3.6. Значения напряженного состояния м/к мостового крана в процессе его
наезда на ТУП при положении грузовой тележки в 1/2Lпр, mгр =8 т: а - Lп = 2 м;
б - Lп = 4 м; в – Lп = 6 м: 1- Vкр =1,3 м/с; 2 - Vкр =1,2 м/с; 3 - Vкр =1,1 м/с
123
Из
вычислительных
экспериментов
было
установлено,
что
время
возникновения максимальных значений деформаций м/к мостового крана при его
наезде на ТУП (рис.3.7) не совпадает для случаев наезда крана с различными
величинами транспортируемого груза. Так, при наезде крана на ТУП с массой
груза 1 т (1/2 Lпр, Lп = 2 м), это время составляло 0,141 с, в то время как для
случаев наезда крана на ТУП с массами груза 8 т и 15 т время составляло,
соответственно 0,132 с и 0,125 с. При этом значения максимальных деформаций
моста крана в момент времени 0,132с при его наезде с 8 т лежат достаточно
близко к значениям наезда с 15 т (см.
рис. 3.7). Вероятно, это связано с
вынужденными колебаниями м/к мостового крана и их резонансными областями
собственных колебаний на частотах, вплоть до 13-15 Гц.
Помимо деформаций главных балок мостового крана по результатам
вычислительных экспериментов удалось также выявить деформации концевых
балок (см. рис. 3.7 а, б). Несмотря на то, что значения деформаций концевых
балок оказались незначительными,
они также
вносят вклад в общее НДС
мостового крана при ударном взаимодействии с ТУП, подтверждением чему
являются
представленные
на
рис.
3.7в,г
их
изгибно
–
крутильные
кососимметричные собственные формы колебаний, приводящие к изгибно перекосным колебаниям главных балок на частотах ω = 9 Гц и близких к ней
слева и справа.
Расположение грузовой тележки в пролете моста крана также играет
важную роль в характере деформации главных балок. Было замечено, что при
смещении грузовой тележки от центра моста приводит к дополнительному
перекосному режиму нагружения м/к мостового крана в горизонтальной
плоскости (см. рис. 3.7 г, д), что, в свою очередь, способствует наиболее
неблагоприятному деформационному состоянию главных балок при ударном
наезде крана на ТУП.
124
а
б
Рис.3.7 а,б. Максимальное деформационное состояние м/к мостового крана
при его наезде на ТУП (Vкр = 1,3 м/с, Lп = 2 м) в зависимости от расположения
грузовой тележки в пролете: а - 1/2 Lпр; б - 2/3 Lпр
125
в
г
Рис.3.7 в,г. Изгибно-крутильные формы деформаций концевых балок: г - левые (ω = 8,96 Гц);
д – правые (ω = 9,01 Гц), приводящие к изгибно-перекосным деформациям главных балок
126
Необходимо отметить, что горизонтальные деформации главных балок м/к
мостового крана установленные при их экспертном обследовании (см. рис. 3.1 а,
б) являются накопленными с годами остаточными деформациями вследствие
действия перекосных нагрузок, горизонтальных сил инерции и т.д. Результаты
НДС м/к мостового крана, полученные методом вычислительного эксперимента
на основе метода конечных элементов (МКЭ) подтвердили вероятность
возникновения поперечных деформаций главных балок крана в горизонтальной
плоскости по причине наезда крана на ТУП (см. 3.7, а - б), что не представлялось
возможным обнаружить авторам работ [4,8,10,11,12,13,14,15,16]. При этом важно
отметить, что горизонтальные деформации главных балок полученные с помощью
вычислительных экспериментов не являются остаточными деформациями, а
наоборот, представляют собой максимальные упругие деформации возникающие
из-за
ударного
взаимодействия
мостового
крана
с
ТУП.
При
частых
возникновениях таких деформаций со временем они могут перейти в остаточные
деформации (см. рис. 3.1 а, б) по причине перераспределения со временем при
циклическом нагружении сварочных остаточных напряжений, вследствие
деформационного старения при одновременном циклическом деформационном
разупрочнении по околошовной зоне сварных соединений главных балок
мостового крана, а также по причине исчерпания несущей способности самих
главных балок. Всё это объясняет разницу между значениями горизонтальных
деформаций полученных натурными замерами (см. рис. 3.1 а, б) и полученными в
результате конечно – элементного анализа (см. рис. 3.7 а, б) [95].
Стоит отметить, что смещение грузовой тележки от центра пролета моста
крана при его наезде на ТУП приводит к перекосному режиму нагружения м/к
крана в горизонтальной плоскости (ср. рис.3.7 а и рис.3.7 б).
Величины полученных значений напряжений (см. рис. 3.3 а), возникающих
в расчетных элементах РМ крана, говорят о возможности возникновения
необратимых деформаций при максимальных параметрах нагружения крана:
наезд крана на ТУП с Vкр = 1,3 м/с, mгр = 15 т, Lп = 2м. При этом одинаково
опасными можно считать наезды крана на ТУП как при расположении грузовой
127
тележки в 1/2Lпр, так и в 2/3Lпр. Помимо этого, повреждения (трещины) часто
возникающие в местах соединения главных балок с концевыми (рис.3.8), говорят
о том, что данное место по-прежнему остается сильным концентратором
напряжений в м/к мостовых кранов всех типов. Напряжения в местах соединения
главных балок с концевыми, возникающие в результате наезда мостовых кранов
на ТУП, согласно результатов вычислительных экспериментов, также могут быть
причиной возникновения трещин в данных местах.
Наибольшую опасность такие удары мостового крана о ТУП будут
представлять для мостовых кранов м/к которых были подвергнуты ремонтным
работам с применением электросварки, особенно в местах соединения главных
балок с концевыми, а также для кранов ресурс которых либо нормативный срок
службы исчерпан [2].
Результаты вычислительных экспериментов показали, что наезд г/п
мостового крана на ТУП с различными эксплуатационными параметрами по
разному влияет на конечное значение НДС м/к крана. Так, смещение положения
грузовой тележки на 33% (2/3 Lпр) от центра моста крана (1/2 Lпр) увеличивает
напряженное состояние в месте соединения главной балки с концевой, к которому
ближе расположена грузовая тележка, на 8%.
Вертикальное расположение транспортируемого груза также влияет на
напряженное состояние м/к мостового крана в процессе его наезда на ТУП. Так,
увеличение длины подвеса с Lп = 2 м до Lп = 6 м приводит к уменьшению
напряженного состояния в месте соединения главных балок с концевыми на 9%.
Согласно результатам вычислительных экспериментов наибольшее влияние
на НДС м/к мостового крана оказывает скорость с которой кран наезжает на ТУП.
Уменьшение скорости наезда на 20 % (с Vкр = 1,3 м/с до Vкр = 1,1 м/с) приводит к
уменьшению напряженного состояния м/к мостового крана в процессе удара с
ТУП на 39 %.
128
Рис. 3.8. Трещина l = 105 мм в сварном шве крепления встык нижних поясных
листов ГБ2 и КБ2 мостового крана г/п 15 т
В заключении следует указать:
1)
Возникает
необходимость
принятия
мер
по
установлению
и
нормированию границ максимально допускаемых эксплуатационных параметров
наезда мостовых кранов на ТУП, прежде всего, по скоростным режимам кранов.
2) Напряженное состояние мостового крана в зонах 2 и 6 (см. рис. 3.2),
возникающее в процессе ударного взаимодействия крана с ТУП, может быть
причиной возникновения трещин в этих местах.
3) Выявлено, что наезд мостовых кранов на ударные ТУП вносит отдельный
вклад в накопление остаточных деформаций не только главных балок мостов, но
также и концевых балок.
4) Расположение грузовой тележки в пролете моста, скорость крана, длина
подвеса и масса транспортируемого груза оказывают разное влияние на результат
НДС мостового крана в процессе его ударного взаимодействия с ТУП.
5) При расположении грузовой тележки в пролете моста < 1/2 Lпр
взаимодействие мостового крана с ударными ТУП приводит к возникновению
129
дополнительных перекосных деформаций м/к крана, чему способствуют и
собственные формы колебаний крана.
6) Для уменьшения величины НДС м/к мостовых кранов в процессе наезда
на ударные ТУП необходимо чтобы
значение Vкр было минимальным, Lп –
максимальным, а грузовая тележка располагалась как можно ближе к центру
пролета моста.
3.1.2. Расчет резиновых буферов мостовых кранов методом
вычислительного эксперимента
На мостовых кранах буфера служат для смягчения ударов при наезде кранов
и их перемещающихся элементов (грузовых тележек) на ТУП или при
столкновении буферами кранов работающих на одном рельсовом пути при
возможной неисправности тормозов или путевых концевых выключателей, а
также при работе кранов
в крайних границах рельсового пути. По причине
простоты конструкции, отсутствия необходимости постоянного ухода и малой
отдачи (приблизительно 30-50% кинетической энергии гасится внутренним
трением) часто
на
мостовых
кранах
применяются
резиновые
(реже
-
полиуретановые) буфера [20]. К основному недостатку таких буферов относится
их сравнительно быстрое изнашивание при частых ударах о ТУП. Так, в
результате экспертной деятельности автора на различных предприятиях
эксплуатирующих
мостовые
краны
постоянно
выявлялась
высокая
повреждаемость буферов (рис.3.9). Примерно 50 % всех экспертируемых буферов
имели видимые повреждения и трещины, 20% из них были полностью
разрушены. Повреждения и трещины были выявлены в основном в торцевой
части буферов, а также в местах соединения буферов с м/к крана. Стоит отметить
и тот факт, что крепление буферов с м/к мостовых кранов не всегда было
достаточно жестким, что давало возможность свободного смещения буфера в
металлическом креплении, а иногда, частичного, и даже полного выпадения
буфера из него. Несмотря на то, что практически все исследованные буфера были
резиновыми (БР-200), встречались также буфера из полиуретановых эластомеров.
130
Повреждения полиуретановых буферов было выражено менее явно и, в основном,
было связано с общим износом таких буферов. Это связано, прежде всего, с
исключительной
высокой
износостойкостью и механической прочностью
полиуретановых эластомеров по сравнению с резиновыми.
Cтоит также отметить, что выявлены случаи повреждений и разрушений
ТУП (рис.3.10), а также деформации м/к мостовых кранов в местах установки
буферов (опорные пластины) (рис. 3.11), что является доказательством
возникновении значительных динамических нагрузок в процессе наезда мостовых
кранов на препятствия.
а
б
в
г
Рис.3.9. Повреждаемость буферов на мостовых кранах: а – повреждение
резинового буфера БР-200; б-устранение повреждения буфера с помощью
хомута; в - полное разрушение резинового буфера БР-200 при наезде на ТУП; г –
частичное повреждение полиуретанового буфера мостового крана г/п 50×2 т
при столкновении с буфером другого крана г/п 30 т
131
а
б
Рис.3.10. Повреждаемость амортизаторов ТУП мостовых кранов:
а - разрушение амортизатора ТУП (дерево); б - разрушение ТУП
а
б
Рис. 3.11. Деформации м/к мостового крана в местах установки буферов:
а, б – разрушение кронштейна буфера
132
Приведённые факты говорят не только о частых наездах мостовых кранов
на ТУП и о существовании высоких ударных динамических нагрузок, но также и
о
проектных
недооценках
элементов
кранового
оборудования
при
конструировании кранов и расчетах на прочность резиновых буферов.
В большинстве работ посвященных расчету крановых буферных устройств
при наезде г/п кранов на ТУП основными исходными данными для расчета
буферов кранов являются значения накопленной кинетической энергии и
величины допускаемых замедлений (отрицательное ускорение) крана, как,
например, в работе Петухова П.З. [17] (см. (1.17)).
В различных отечественных справочниках и учебниках по кранам [20]
приводятся уравнения для расчета крановых буферных устройств по их
энергоемкости. Причем практически везде буфера рассчитываются на поглощение
кинетической энергии крана движущегося со скоростью 50% номинальной при
ускорении замедления крана не более 4 м/с2 [20] (см. (1.19)), согласно
предложению
ВНИИПТмаш,
поскольку
«поглощение
буферами
полной
кинетической энергии крана при больших скоростях и массах неосуществимо».
Расчёт резиновых (полиуретановых) буферов, как в отечественных [36], так
и в зарубежных [37,38,39] стандартах по мостовым грузоподъемным кранам
направлен на определение кинетической энергии, которую буфера должны
воспринять в момент соударения буферов крана с ТУП. Далее полученное
значение энергии сравнивается с известными значениями энергоемкости буферов,
таким образом выбирается два буфера общая энергоемкость которых не ниже
полученного значения кинетической энергии движения крана.
Таким же образом рассчитываются буфера заводами - изготовителями
кранов и буферов [41,50]. Стоит отметить, что часто изготовители кранов [41],
также, как и некоторые стандарты и правила [39], индивидуально вводят
различные сочетания нагрузок, избегая при этом характерные параметры, которые
играют важную роль в расчёте буферов, что может привести к значительной
недооценке реальных ударных нагрузок, которые испытывают буфера при наезде
мостовых
кранов
на
ТУП.
Стоит
особенно
отметить,
что
остается
133
неопределенность в том, как отечественный изготовитель буферов марки БР
определяет их энергоёмкость. Если у зарубежных изготовителей буферов [41,50]
имеется информация по экспериментальным исследованиям буферов, например,
на прочность при статическом сжатии, то у отечественного производителя она
полностью отсутствует. Также стоит подчеркнуть, что при личном общении с
изготовителями материала для буферов выяснилось, что динамические испытания
на удар данного материала не проводятся, а ТУ данных предприятий (например,
ТУ 2500-376-00152106-94 [51]) также не содержит информации о пределе
прочности материала буферов при ударном наезде на ТУП.
Из анализа научных работ, стандартов и правил [3] можно сделать
следующие выводы, что при расчёте резиновых (полиуретановых) буферов
мостовых кранов:
1) не учитываются упругие и демпфирующие характеристики буферов при
их ударе о ТУП;
2) не учитываются физико-механические характеристики материала из
которого изготовлен амортизатор ТУП;
3) не учитывается действительная м/к мостового крана, а также
конструкционные характеристики буферов и ТУП;
4) не учитывается длина подвеса транспортируемого груза в режиме наезда
крана на ТУП;
5) не учитывается влияние вынужденных колебаний транспортируемого
груза на подвесе;
6) практически во всех стандартах не учитывается положение грузовой
тележки в пролёте моста крана в момент удара о ТУП.
Из опыта автора, в качестве демпфирующего устройства
на мостовых
кранах отечественных предприятий преобладают резиновые буфера марки БР.
При этом стоит отметить, что в европейских странах, в Америке, Австралии и
Африке [37,38,39,42,43] предпочитают применять полиуретановые буфера,
которые, несмотря на большую стоимость, имеют некоторые преимущества перед
резиновыми буферами, прежде всего, меньшую силу отдачи при восстановлении
134
буфера. Исследованию проблемы взаимодействия полиуретанового буфера марки
DPZ-100 с ТУП в процессе наезда мостового однобалочного крана г/п 5т
посвящена работа [16].
В связи с вышесказанным, автором была поставлена цель изучить несущую
способность отечественных резиновых буферов марки БР, использующихся для
смягчения ударов при наезде мостовых кранов на ТУП, путем проведения
натурных экспериментов (см. пп.4.2) и расчетов на основе численного метода
анализа – МКЭ [96].
Для исследования были выбраны двухбалочные мостовые краны г/п 15/3 т
пролётом 22,5 м (см. рис. 2.2) в большом количестве эксплуатирующиеся на
производственно - строительном комплексе ОАО «Строитель Астрахани».
Основные технические характеристики мостового крана г/п 15/3 т приведены в
табл. 2.1. На всех мостовых кранах установлены резиновые буфера марки БР-200.
Для определения возможности использования буферов марки БР-200 на
рассматриваемых типах мостовых кранов была использована методика выбора
буферов по ОСТ 24.191.37-78 [36], согласно которой конструкция, общие размеры
и характеристика резиновых буферов должны соответствовать рис. 3.12 и табл.
3.1.
Рис.3.12. Конструкция резинового буфера марки БР: 1 - буфер; 2 – фланец
135
Таблица 3.1. Размеры и характеристики резиновых буферов марки БР [36]
Условное обозначение
Буфер
Амортиза Фланец
резиновый тор
Размеры,
мм
Максимальные рабочие
Усилие,
Ход S, Энергоемкос
D
H
Fmax , Н
м
ть E, Н×м
БР40
БР40-1
БР40-2
40
40
3280
0,0120
19,7
БР50
БР50-1
БР50-2
50
50
5120
0,0152
38,9
БР63
БР63-1
БР63-2
63
63
8130
0,0200
81,3
БР80
БР80-1
Б Р 80-2
80
80
13100
0,0254
166,3
БР100
БР100-1
БР100-2
100
100
20500
0,0316
324,0
БР125
БР125-1
БР125-2
125
125
32000
0,0416
666,0
БР160
БР160-1
БР160-2
160
160
52500
0,0544
1430,0
БР200
БР200-1
БР200-2
200
200/
82000
0,0704
2890,0
180*
БР225
БР225-1
БР225-2
225
225
103800
0,0787
4090,0
БР250
БР250-1
БР250-2
250
250
128000
0,0888
5680,0
БР320
БР320-1
БР320-2
320
320
210000
0,1150
12070,0
БР350
БР350-1
БР350-2
350
350
250000
0,1240
15550,0
*Значение полученное согласно сведениям отечественных производителей
буферов марки БР.
Согласно [36] для расчёта буферов следует предварительно выбрать два
буфера из условия
mV02
nE1
nE2 ,
2
(3.1)
где n – число буферов, одновременно воспринимающих кинетическую энергию
крана; E1 и E2 – максимальные рабочие энергоёмкости буферов согласно табл. 3.1;
m – масса крана плюс 10% массы номинального груза; V0 0,5Vкр ; Vкр номинальная скорость движения крана, м/с.
136
Сравним два буфера – БР-160 и БР-200. Согласно табл. 3.1 максимальные
рабочие параметры буфера БР-160: усилие – 52,5 кН; ход – 0,0544 м;
энергоёмкость - 1430 Нм; БР-200: усилие – 82 кН; ход – 0,0704 м; энергоёмкость 2890 Нм.
Полный вес мостового крана г/п 15/3т (согласно паспорту крана) равен
25800 кг; скорость передвижения крана – 1,3 м/c. Тогда, согласно формуле (3.1),
имеем:
2 *1430( БР160)
(25800 1500) * (0,5*1,3)2
2 * 2890( БР 200) ,
2
2860( БР160) 5767 5780( БР 200) .
Принимаем буфер БР-200 и производим окончательный выбор буферов из
условия:
mV02
( Fзат Fв ) S nE ,
2
(3.2)
где S - максимальный рабочий ход (деформация) буфера, м; F зат - общее
затормаживающее сопротивление движению крана, Н; Fв - нагрузка от ветра с
динамическим давлением q = 125 Па по ГОСТ 1451-77 [40], Н;
Fзат mкр j ,
(3.3)
где mкр - масса крана, кг; j – максимально допустимая расчетная величина
замедления при торможении, м/с2, принята из [97].
Подставляя числовые значения в (3.2), получаем:
(25800 1500) * (0,5*1,3) 2
0,0704 * (25800 * 0,3 6868,8) 2 * 2890 ;
2
5706 Нм 5780 Нм .
137
Таким образом, согласно расчетам по (3.1) и (3.2), можно сделать вывод о
том, что резиновый буфер БР -200 обладает достаточной энергоёмкостью и может
быть применен в качестве демпфирующего устройства на рассматриваемом
мостовом кране.
Для того чтобы точно построить модель буфера марки БР-200 (Dб=200мм,
Lб=180мм) было необходимо экспериментально получить механические свойства
материала из которого он изготовлен. Результаты проведенных экспериментов по
определению механических свойств буфера БР-200 описаны в пп.4.1.
На основе построенной конечно-элементной модели мостового крана была
проведена серия вычислительных экспериментов процесса наезда крана на
ударные ТУП буферами БР - 200 (рис.3.13). Значения деформаций конечноэлементного резинового буфера БР-200 при ударе о ТУП, полученные в
результате
вычислительных
экспериментов,
сравнивались
со
значениями
полученными в результате натурных экспериментов наезда мостового крана г/п
15/3 т зав. №6860 рег.№39039 на ТУП в условиях ПСК ОАО «Строитель
Астрахани» для проверки адекватности поведения конечно-элементной модели.
Описание натурных экспериментов по наезду мостового крана на ударные ТУП
изложено в пп.4.2.
В результате вычислительных экспериментов были получены функции
зависимости деформации буфера от силы удара при различных эксплуатационных
параметрах наезда мостового крана на ТУП. Путем интегрирования полученных
функций были получены величины энергий, которые поглощаются материалом
буфера при ударе о ТУП (рис.3.14 - 3.15).
138
а
б
Рис.3.13. Вычислительный эксперимент исследования поведения буфера БР-200
при наезде мостового крана г/п 15/3 т на ТУП: а – общий вид РМ мостового
крана; б-анимационный процесс наезда крана на ТУП: 1,2,3 – процесс наезда
крана на ТУП; 4,5,6 – процесс отката крана
139
Согласно полученным значениям, величина энергии, которую поглощает
один резиновый буфер БР-200 в результате наезда мостового крана г/п 15/3 т с
максимальной номинальной скоростью (Vкр=1,3м/с) и с максимальной массой
транспортируемого груза (mгр=15т) на деревянный амортизатор ТУП равняется
5468 Нм (Дж). По вычисленному значению (3.2) один буфер должен поглотить
энергию равную 5706/2 = 2853 Нм. Таким образом, значение вычисленной
энергии по (3.2) оказываются почти в 2 раза меньше значения энергии
полученной в результате вычислительного эксперимента 5468 Нм, что, в свою
очередь, говорит о том, что энергия поглощенная буфером в результате удара о
ТУП, во столько же раз превышает рабочую энергоемкость буфера БР-200 (2890
Нм). Поэтому можно сделать вывод о том, что аналитический расчет по выбору
буферов согласно [36] является не точным и недооценивает реальные силы удара
буфера в результате наезда мостовых кранов на ТУП. Прежде всего это связано с
тем, что аналитические формулы по расчету крановых буферов, такие как (3.2), не
принимают во внимание многие важные параметры, перечисленные выше.
Изменение значений параметров наезда мостового крана на ТУП, таких как
mгр, расположение грузовой тележки в пролете моста (Lпр) и др., как показали
результаты вычислительных экспериментов, также влияют на конечное значение
поглощенной энергии буфером в результате удара. Так, согласно полученным
зависимостям деформации буфера от силы удара изображенным на рис. 3.14, при
изменении величины mгр с 0 т до 15т сила удара буфера увеличивается на 8,4%.
При этом стоит отметить, что с уменьшением длины подвеса транспортируемого
груза сила удара буфера о ТУП будет расти, достигая наиболее неблагоприятного
значения при минимальной длине подвеса груза.
а
140
б
Рис.3.14. Энергия (Eп) поглощённая буфером БР-200 в результате наезда
мостового крана г/п 15/3 т на ТУП (Vкр=1,3м/с, Lп = 2м) при различных
параметрах наезда: а - 1- 1/2Lпр, mгр=0 т (Eп=5035 Нм); 2- 1/2Lпр, mгр=15 т
(Eп=5468 Нм); б - 1- 1/2Lпр, mгр=0 т (Eп=5035 Нм);2- 2/3Lпр, mгр=0 т (Eп=5710
Нм)
Расположение грузовой тележки в пролете моста также влияет на величину
силы удара буфера. Буфер, к которому ближе расположена грузовая тележка,
испытывает большую силу удара по сравнению с тем, который располагается
дальше от нее. Так, сила удара буфера, как показал вычислительный эксперимент,
увеличивается на 9,9 % (см. рис. 3.14 б) при расположении грузовой тележки в
2/3Lпр по сравнению со значением силы удара при расположении грузовой
141
тележки в 1/2Lпр. Стоит особо отметить влияние материала из которого сделан
амортизатор ТУП на конечную силу удара буфера. Согласно полученным
значениям, сила удара буфера уменьшается почти на 45% при наезде мостового
крана на ТУП с резиновым амортизатором (имеющий физико-механические
свойства такие же, как у материала буфера) по сравнению с использованием
деревянного амортизатора тех же типоразмеров (рис.3.15).
Согласно графику изображенному на рис. 3.15 резиновый амортизатор
уменьшает поглощенную энергию буфером с 5035 Нм до 2765 Нм. Таким
образом, можно сделать вывод о том, что большая часть энергии (45%)
при
ударе буфера о резиновый амортизатор ТУП, поглощается материалом
амортизатора ТУП, что, в свою очередь, уменьшает рабочую нагрузку на
материал буфера.
Рис.3.15. Энергия (Eп) поглощённая буфером БР-200 в результате наезда
мостового крана г/п 15/3 т на ТУП (Vкр=1,3м/с, Lп = 2м, 1/2Lпр, mгр=0 т) при
различных амортизаторах ТУП: 1- резиновый (Eп=2765 Нм);
2- деревянный(Eп=5035 Нм)
Опираясь на полученные результаты вычислительных экспериментов, а
также на имеющийся опыт расчета буферов г/п кранов [41,50], предлагается
корректировка формул (3.1) и (3.2). Путем подстановки экспериментально
142
полученных значений Eп в формулу кинетической энергии (3.1) были определены
коэффициенты учета влияния номинальной скорости движения крана и
транспортируемого груза на гибком подвесе на конечное значение поглощенной
энергии буферами мостового крана. В результате подстановки полученных
коэффициентов формула (3.1) приобретает следующий вид:
nE1
( mкр 0,15 mгр ) (0,68 Vкр ) 2
2
nE2 .
(3.4)
Согласно полученной формуле (3.4) буфер должен быть способен поглотить
кинетическую энергию возникающую от 68% номинальной скорости наезда
мостового крана на ТУП. Общая масса системы должна складываться из полной
массы крана и 15% массы номинального груза. Нужно еще раз заметить, что
согласно рис. 3.15 общая кинетическая энергия, поглощенная материалом буфера
при ударе о ТУП, будет меньше при тех же параметрах наезда в случае
использования резинового амортизатора ТУП. В этом случае формула (3.4)
примет следующий вид:
nE1
( mкр 0,15 m гр ) (0,51 Vкр ) 2
2
nE 2 .
(3.5)
Несмотря на то, что формулы (3.4) и (3.5) по-прежнему остаются
аналитическими, то есть отражают приближенный расчет крановых буферов,
данные формулы хорошо согласуются со значениями реальных ударных нагрузок
воспринимаемых буферами в процессе наезда мостовых кранов на ТУП. При этом
не
стоит
забывать,
что
на
работоспособность
и
величину
ударного
взаимодействия крановых буферов с ТУП оказывают влияние и другие факторы,
такие как внешние условия эксплуатации, техническое состояние ТУП,
нормативная установка буферов и ТУП, синхронность работы МПК, состояние
металлоконструкции мостового крана, а также несущих поддерживающих
конструкций здания (колонн) и рельсовых путей на которых эксплуатируется
мостовой кран.
143
В заключении следует отметить:
1) Согласно результатам вычислительных экспериментов, кинетическая
энергия мостового крана г/п 15/3 т воспринимаемая резиновыми буферами марки
БР-200 в тупиковых участках пути превышает вдвое энергоемкость буферов.
2)
Аналитическая
формула
(3.1)
из
ОСТ
24.191.37-78
[36]
по
предварительному выбору резиновых буферов марки БР недооценивает, по
крайней мере вдвое, действительную кинетическую энергию крана поглощаемую
буферами.
3) Расположение грузовой тележки в пролете моста, скорость крана, длина
подвеса
и
масса
характеристики
транспортируемого
материала
буферов
груза,
и
упругие
амортизаторов
и
демпфирующие
ТУП,
оказывают
значительное влияние на конечную силу взаимодействия мостового крана с ТУП
и поэтому должны приниматься во внимание при рассмотрении ударных
процессов наезда мостовых кранов на ТУП.
4) Использование резинового амортизатора ТУП (изготовленного из того же
материала, что и буфер) вместо деревянного, снижает рабочую нагрузку на
резиновый буфер мостового крана на 45 %.
5) Формулы (3.4) и (3.5) позволяют точнее оценить действительную
кинетическую энергию мостовых кранов поглощаемую буферами в процессе их
наезда на ТУП, в том числе при наиболее неблагоприятных эксплуатационных
состояниях наезда.
6)Эксплуатационными
состояниями
оказывающими
наиболее
неблагоприятное воздействие на работу резиновых буферов при наезде мостовых
кранов на ТУП следует считать: Vкр = max; mгр = max; Lп = min, а также
наибольшее смещение грузовой тележки от центра моста крана.
144
3.2. Расчетный динамический анализ процесса взаимодействия портальных
кранов с ударными тупиковыми упорами*
3.2.1. Общие положения
При проведении обзора научной литературы по проблеме наезда г/п кранов
на ТУП автору настоящей работы не удалось найти ни одной научной работы
посвященной наезду портальных кранов на ТУП. При этом данная проблема
является не менее актуальной по сравнению с задачей расчетного анализа наезда,
например, кранов мостового типа на ударные ТУП. Расчет буферов, также как и
вопрос устойчивости портальных кранов при наезде на ударные ТУП остаются
важными проблемами, требующими изучения и уточнения.
3.2.2. Расчет резиновых буферов портальных кранов методом
вычислительного эксперимента
На портальных, также как и на других типах г/п кранов, буфера служат для
смягчения ударов при наезде на ТУП или при столкновении кранов работающих
на одном рельсовом пути. Динамические нагрузки возникающие в результате
таких столкновений, как правило, не предусмотрены в технологических
процессах
предприятий,
существенное
влияние
носят
на
случайный
промышленную
характер,
однако
безопасность,
оказывают
надежность
и
долговечность работы кранов. Так, в результате экспертной деятельности на
различных
предприятиях
выявлялась
высокая
повреждаемость
буферов
различных типов портальных кранов (рис.3.16 а, б).
Стоит особенно отметить, что как в отечественных [14] так и в зарубежных
стандартах [37,38] по г/п кранам не было найдено ни одного указания по расчету
буферов для портальных кранов. При этом определение реакции силы удара при
наезде портального крана на ТУП, также как и расчет буферов для данных типов
*
Работа выполнялась в соответствии с госбюджетной темой в плане научно-исследовательской работы
Астраханского государственного технического университета на кафедре «Подъемно-транспортные машины» на
2012-2013 гг. «Расчетно-экспериментальное исследование безопасной эксплуатации портальных кранов при
взаимодействии с тупиковыми упорами», номер государственной регистрации № 01201179194.
145
кранов затруднен, кроме того тем, что м/к портальных кранов, также как и
башенных, представляет собой сложную разветвленную систему, которая не
может быть отражена сосредоточенной массой, и таким образом, точно
подсчитана по (3.1).
а
б
Рис. 3.16. Повреждаемость резиновых буферов портальных кранов: а –
частичное разрушение буфера БР-200; б – полное разрушение буфера
В связи с вышесказанным была поставлена цель определения вида
аналитических формул типа (3.4) и (3.5) по расчету буферов для портальных
кранов. За основу методики выбора и расчета резиновых буферов для портальных
кранов принята методика аналогичная предложенной в пп. 3.1.2.
Для исследования был выбран портальный кран «ABUS» г/п 10 т (см. рис.
2.14) эксплуатирующийся на судостроительном заводе ОАО ССЗ «Красные
Баррикады» (Астрахань),. основные технические характеристики которого
приведены в табл. 2.2.
Полный вес портального крана (согласно паспорту крана) равен 176780 кг;
номинальная скорость передвижения крана – 0,4125 м/с; тип установленных
буферов – БР-200. Тогда согласно формуле (3.1) имеем:
146
(176780 1000) * (0,5* 0,4125) 2
2 *1430( БР160)
2* 2890( БР 200) ,
2
2860 ( БР160) 3781 5780 ( БР 200) .
(3.6)
Принимаем буфер БР-200 и производим окончательный выбор буферов.
Согласно табл. 3 [40] для кранов установленных в речных и морских портах
динамическое давление ветра следует принять равным q = 250 Па, а максимально
допустимую расчетную величину замедления при торможении портальных
кранов, в соответствии с [97], принимаем j = 0,15 м/с2.
Тогда, согласно формуле (3.2):
(176780 1000) * (0,5* 0,4125) 2
0,0704 * (176780 * 0,15 12430) 2 * 2890
2
2789 Нм 5780 Нм .
Таким образом, согласно расчетам по (3.1) и (3.2), можно сделать вывод о
том, что резиновый буфер БР-200 обладает достаточной энергоёмкостью и может
быть применен в качестве демпфирующего устройства на портальном кране
«ABUS» г/п 10 т.
Для определения сил взаимодействия буферов БР-200 портального крана с
ТУП на основе построенной РМ (см. рис. 2.27) была проведена серия
вычислительных экспериментов в программе ANSYS по наезду портального
крана «ABUS» г/п 10 т на ударные ТУП.
Реакция механической системы со многими степенями свободы на сложное
внешнее воздействие существенным образом зависит от частотных свойств самой
системы. Поэтому в динамических расчетах широко распространенной является
задача о собственных колебаниях, в которой необходимо вычислить все или
несколько первых собственных частот и соответствующих им форм колебаний.
Кроме того, вопрос изучения свободных колебаний конструкции, задача
нахождения собственных частот и форм колебаний является составной частью
решения многих других задач динамики, таких, например, как линейноспектральный метод (ЛСМ) теории сейсмостойкости и метод динамического
анализа (МДА).
147
Поэтому предварительно при изучении процессов наезда г/п кранов на ТУП
для всех изучаемых типов кранов были проанализированы их собственные
частоты и формы колебаний. Так, при положении ШССС портального крана
вдоль КРП можно ожидать опасного колебательного процесса крана на частотах
более 1 Гц в его инерциальном движении после наезда крана на ТУП (рис. 3.17
а), что должно послужить принятием решения по скоростным режимам
эксплуатации портального крана «ABUS» в условиях его столкновения с ТУП и
оценке его устойчивости положения в пространстве, прежде всего, при
возможном отказе ПУГ и угоне крана ветром. Как установлено анализом
собственных частот крана при эксплуатационном состоянии ШССС под 90° к
направлению КРП, опасные частоты, исходя из формы деформирования м/к
крана, при наезде портального крана на ТУП, лежат в области 1 - 1,25 Гц, что
соответствует поступательным формам собственных колебаний (см. рис. 3.17 б).
а
б
Рис. 3.17. Поступательное смещение крана в целом на собственной частоте:
а - при положении ШССС вдоль КРП(ω=1,23 Гц); б- при положении ШССС
перпендикулярно к КРП (ω=1,25 Гц)
148
За основные расчётные эксплуатационные состояния портального крана
«ABUS» г/п 10 т при наезде на ТУП были приняты следующие параметры и
положения:
1) расположение транспортируемого груза на вылете стрелы 7 м и 22 м;
2) масса транспортируемого груза 0 т и 10 т;
3) начальная скорость наезда 0,4125 м/с;
4) высота подвеса транспортируемого груза 2 м;
5) расположение стрелы крана по направлению рельсового пути и под углом
90º к направлению движения крана ( рис.3.18).
а
б
в
г
Рис. 3.18. Эксплуатационные состояния рассматриваемые в задаче наезда
портального крана «ABUS» на ударные ТУП: а - mгр =10 т, Lв=22 м; б - mгр =10
т, Lв=7 м; в – расположение стрелы под 90º к направлению движения крана:
mгр =10 т, Lв=22 м; г - тоже, mгр =10 т, Lв=7 м
149
В результате вычислительных экспериментов были получены функции
зависимости деформации буфера БР-200 от силы удара при различных
эксплуатационных параметрах наезда портального крана «ABUS» г/п 10 т на ТУП
(рис. 3.19, 3.20). Путем интегрирования полученных функций были получены
величины кинетических энергий крана, поглощаемые материалом буфера в
процессе наезда крана на ТУП (см. рис.3.20). Согласно рис.3.20а, при наезде
портального
крана
«ABUS»
г/п
10
т
на
ТУП
с
максимальными
эксплуатационными параметрами при максимальном вылете стрелы (Lв=22 м)
резиновый буфер БР-200 поглощает энергию равную 3461 Нм. Напротив, при
наезде крана с теми же максимальными параметрами, но с транспортируемым
грузом равным 0 т, величина поглощенной энергии одним буфером составит 3420
Нм. При наезде портального крана на ТУП с массой транспортируемого груза 10 т
с минимальным вылетом стрелы (см. рис.3.20б) поглощенная энергия составит
3677 Нм, согласно вычислительному эксперименту. Поэтому можно сделать
вывод о том, что наибольшее влияние на силу ударного взаимодействия буферов
портального крана с ТУП оказывает величина вылета стрелы крана. Расчеты
проводились также для случая наезда портального крана «ABUS» г/п 10 т на ТУП
(Vкр = 0,4125 м/с, mгр=10 т, Lп = 2 м) при расположении стрелы крана под углом
90° по отношению к направлению движения крана (см. рис. 3.18в,г). По
результатам расчетов было выявлено, что наибольшая сила взаимодействия
буферов портального крана с ТУП также возникает в случае минимального
вылета стрелы крана (Lв = 7 м). Было замечено, что при таком эксплуатационном
состоянии крана сила удара буфера о ТУП увеличивается в среднем на 12%. При
этом наибольшую нагрузку воспринимает буфер в сторону которого развернута
стрела крана, сила ударного взаимодействия с ТУП которого составила 175 кН по
сравнению с 154 кН случая наезда портального крана с расположением стрелы
вдоль его направления движения.
150
а
б
Рис.3.19. Вычислительный эксперимент исследования поведения буфера БР-200
при наезде портального крана «ABUS» г/п 10 т на ТУП: а – общий вид РМ
портального крана; б-анимационный процесс наезда крана на ТУП:
1,2,3 – процесс наезда крана на ТУП; 4,5,6 – процесс отката крана
151
а
б
Рис.3.20. Энергия (Eп) поглощённая буфером БР-200 в результате наезда
портального крана «ABUS» г/п 10 т на ТУП (Vкр=0,4125 м/с, Lп = 2м): а: 1mгр=0т, Lв=22 м (Eп=3420 Нм); 2- mгр=10 т, Lв=22 м (Eп=3461 Нм);
б: 1- mгр=10 т, Lв=22 м (Eп=3461 Нм); 2- mгр=10 т, Lв=7 м (Eп=3677 Нм)
Вычислительные эксперименты были проведены также при условии
использования в качестве амортизатора ТУП материала по физико-механическим
свойствам идентичным буферу марки БР (рис. 3.21).
В соответствии с полученными результатами в случае использования
резинового амортизатора ТУП вместо деревянного, тех же геометрических
размеров, поглощенная энергия буфером портального крана уменьшается на 40%.
152
Рис. 3.21. Энергия (Eп) поглощённая буфером БР-200 в результате наезда
портального крана «ABUS» г/п 10 т на ТУП с различными амортизаторами
(Vкр=0,4125 м/с, mгр=10 т, Lв=7 м, Lп = 2м): 1 – резиновый (Eп=2180 Нм); 2 –
деревянный (Eп=3677 Нм)
Опираясь на результаты вычислительных экспериментов и расчеты по
предварительному выбору типа резинового буфера БР (3.6) оказывается, что при
наезде портального крана на ТУП с минимальным вылетом стрелы поглощенная
энергия одним буфером в 1,3 раза превышает рабочую энергоемкость буфера БР200. При этом общая поглощенная энергия буферами, согласно расчету (3.6), в 2
раза меньше поглощенной энергии полученной в результате вычислительных
экспериментов (Eобщ = 3677*2 = 7354 Нм). Таким образом, можно сделать вывод о
том, что аналитическая формула по расчету резиновых буферов марки БР для
портальных кранов (3.1) является не достаточно точной и поэтому требует
уточнения.
Путем
подстановки
экспериментально
полученных
значений
поглощенной энергии буфером БР-200 в формулу (3.1) были определены
коэффициенты учитывающие влияние действительной м/к портального крана,
влияние транспортируемого груза, скорости и различных эксплуатационных
состояний на процессы ударного взаимодействия крана с ТУП. Таким образом,
формула по предварительному выбору типа резинового буфера марки БР для
153
портальных кранов с учетом максимально возможного удара о ТУП принимает
следующий вид:
( m кр 0, 22 m гр ) (0, 7 Vкр ) 2
nE1
2
nE 2 .
(3.7)
В случае использования резинового амортизатора для ТУП формула (3.7)
будет выглядеть так:
nE1
( mкр 0, 22 m гр ) (0,54 Vкр ) 2
2
nE 2 .
(3.8)
Следует отметить, что в реальности силы удара и поглощаемая энергия
буферами портального крана, подсчитанная по формуле (3.7) и (3.8), могут
изменяться в зависимости от влияния различных факторов, таких как внешние
условия эксплуатации, техническое состояние ТУП, нормативная установка
буферов и ТУП, состояние металлоконструкции портального крана по параметрам
износа и рельсовых путей на которых эксплуатируется портальный кран.
В заключении следует указать:
1) Согласно результатам теоретических расчетов, кинетическая энергия
портального крана «ABUS» г/п 10 т воспринимаемая резиновыми буферами
марки БР – 200 в тупиковых участках пути превышает в 1,3 раза энергоемкость
буферов.
2)Расположение
транспортируемого
характеристики
и
груза,
материала
вылет
скорость
буферов
стрелы
портального
крана,
упругие
и
амортизаторов
и
крана,
масса
демпфирующие
ТУП
оказывают
значительное влияние на конечную силу взаимодействия портального крана с
ТУП и поэтому должны приниматься во внимание при рассмотрении ударных
процессов наезда портальных кранов на ТУП.
3) Использование резинового амортизатора ТУП (изготовленного из того же
материала, что и буфер) вместо деревянного, снижает на 40% рабочую нагрузку
на буфер в результате ударного взаимодействия портального крана с ТУП.
4)Формулы (3.7) и (3.8) позволяют приближённо оценить действительную
кинетическую энергию портального крана поглощаемую буферами в процессе
154
наезда крана на ТУП при наиболее неблагоприятных эксплуатационных
параметрах наезда.
5)Эксплуатационными
состояниями
оказывающими
наиболее
неблагоприятное воздействие на работу резиновых буферов при наезде
портальных кранов на ТУП следует считать: Vкр = max; mгр = max; Lв = min;
расположение стрелы крана под 90° по отношению к направлению движения
крана.
3.3. Расчетный динамический анализ процесса наезда башенных кранов на
безударные тупиковые упоры*
Согласно [49] наибольшее число аварий среди г/п кранов приходится
именно на башенные краны, среди основных причин аварий которых являются:
неисправность
тормозов,
приборов
и
устройств
безопасности,
а
также
неисправность путевого оборудования крановых рельсовых путей. Безударные
(гравитационные) ТУП предназначены для плавного гашения остаточной
скорости башенного крана в конце пути и предотвращения его схода с концевых
участков
кранового
пути
при
аварийных
ситуациях,
таких
как
отказ
выключающих линеек, концевых выключателей хода крана, тормозов механизмов
передвижения крана, либо угон крана ветром вследствие неисправности ПУГ. На
практике безударные ТУП, как противоаварийное средство, часто бывает не
эффективным. Снос, либо переезд краном через безударные ТУП, как правило
происходящие по причине угона крана ветром либо вследствие не соблюдения
персоналом Правил безопасности ОПО на которых используются подъёмные
сооружения [98] приводит к аварийному опрокидыванию башенных кранов.
Изучение процессов взаимодействия башенных кранов с
ТУП
проводилось
на
примере
башенного
крана
КБ-408.21
безударными
г/п
10
т
*
Работа выполнялась в соответствии с госбюджетной темой в плане научно-исследовательской работы
Астраханского государственного технического университета на кафедре «Подъемно-транспортные машины» на
2013 г. «Расчетно-экспериментальное исследование и разработка мер обеспечения безопасной эксплуатации
башенных кранов при взаимодействии с безударными тупиковыми упорами», номер государственной регистрации
№ 01201179194.
155
эксплуатирующегося на производственно - строительном комплексе ОАО
«Строитель Астрахани»,
основные технические характеристики которого
приведены в табл.2.3. Согласно результатам анализа собственных частот крана
при расположении стрелы крана вдоль КРП в момент наезда крана КБ-408.21 на
безударные ТУП опасной частотой следует ожидать частоту более 1 Гц (1,4 Гц,
см. рис. 3.22а), поскольку такая частота соответствует общему поступальному
перемещению всей м/к крана в направлении наезда на ТУП. При расположении
стрелы под 90° к КРП опасная частота понижается до 1,05 Гц (см. рис. 3.22б).
а
б
Рис. 3.22. Форма поступательных перемещений башенного крана КБ-408.21 в
целом: а- при расположении стрелы вдоль КРП ( ω = 1,4 Гц) ; б - при положении
стрелы крана перпендикулярно к КРП (ω = 1,05 Гц)
156
За основные расчётные эксплуатационные состояния башенного крана КБ408.21 г/п 10 т при наезде на ТУП были приняты следующие параметры и
положения (рис. 3.23):
1) расположение транспортируемого груза на вылете стрелы 16 м и 40 м;
2) масса транспортируемого груза 10т;
3) начальная скорость наезда 0,3 м/с и 0,9 м/с;
4) высота подвеса транспортируемого груза 2 м;
5) расположение стрелы крана по направлению рельсового пути и под углом
90º к направлению движения крана.
а
в
б
г
Рис. 3.23. Эксплуатационные состояния рассматриваемые в задаче наезда
башенного крана КБ-408.21 на безударные ТУП: а - mгр =10 т, Lв=16 м; б - mгр =3
т, Lв=40 м; в – расположение стрелы под 90º к направлению движения крана:
mгр =10 т, Lв=16 м; г- тоже, mгр = 3 т, Lв=40 м
157
На основе построенной РМ башенного крана КБ-408.21 (см. рис. 2.41) была
проведена серия вычислительных экспериментов в программе ANSYS для
изучения аварийного наезда (например, в случае отказа приборов и устройств
безопасности (выключающих линеек), либо отказа тормозных систем) башенного
крана на безударные ТУП с учетом различных эксплуатационных состояний
крана (см. рис.3.23):
Для проверки адекватности теоретического поведения РМ башенного крана
КБ-408.21 была проведена серия натурных экспериментов описанных в пп.4.3.
В результате серии вычислительных экспериментов была получена полная
картина поведения башенного крана в пространстве
в процессе наезда на
безударные ТУП. В частности, в результате вычислительных экспериментов
удалось определить: 1) скоростные характеристики режима наезда на ТУП
башенного крана; 2) характеристики устойчивости положения в пространстве
крана; 3)деформационное состояние м/к крана; 4) поведение транспортируемого
груза на гибком подвесе. На рис. 3.24 приведен полученный в результате
вычислительного эксперимента анимационный процесс наезда башенного крана
на ТУП с максимальной скоростью передвижения крана (согласно паспорту
крана) 0,3 м/с и скоростью в три раза превышающей максимальную – 0,9 м/с,
которая может возникнуть, например, при угоне башенного крана ветром.
Было установлено, что при наезде башенного со скоростью 0,3 м/с на
безударные ТУП, скорость крана полностью гасится на расстоянии 0,27 м
тормозного пути пройденного колесами ходовых тележек крана по безударному
ТУП (см. рис. 3.24 а и рис. 3.25). В случае если кран наезжает на ТУП со
скоростью 0,9 м/с, как показал вычислительный эксперимент, при этой скорости
существует вероятность переезда крана через безударные ТУП (см. рис.3.24 б
поз.5).
158
а
б
Рис.3.24. Полученный в результате вычислительного эксперимента процесс
наезда башенного крана КБ-408.21 на безударные ТУП при расположении стрелы
в направлении движения крана (mгр=10т, Hп=2м,Lвс=16м) со скоростью: а - Vкр=
0,3 м/с: 1-4 – процесс наезда крана на ТУП; 5-9 – процесс съезда крана с ТУП; бVкр= 0,9м/с: 1-5 – процесс наезда крана на ТУП; 6-9 – процесс съезда крана с ТУП
159
Рис.3.25. Полученные в результате вычислительного эксперимента значения
изменения скорости башенного крана в процессе наезда на безударные ТУП (см.
рис. 3.24): 1- Vкр=0,3м/с; 2- Vкр=0,9м/с;
3- момент времени начала отъезда крана с ТУП
Результаты вычислительных экспериментов также показали, что после
наезда башенного крана на безударные ТУП происходят отрывы задних колес
ходовых тележек крана. На рис. 3.26 а показаны графики высот отрыва задних
колёс ходовых тележек башенного крана в результате наезда на ТУП с
максимальной скоростью движения крана 0,3 м/с (согласно паспорту крана) при
различных значениях массы транспортируемого груза и различных значениях
расположения грузовой тележки на длине стрелы башенного крана. Как видно из
рис.3.26 а, наиболее неблагоприятные значения отрыва задних колёс крана
происходят при наезде башенного на ТУП с эксплуатационными параметрами
наезда (4) и (5). При данных параметрах очень высока вероятность схода ходовых
колёс крана с рельсового пути, при этом, при всех остальных параметрах наезда
(см. рис. 3.26 а, зависимости (1) - (3)), как показало поведение РМ, колёса крана
после отрыва вновь встают на рельс.
160
а
б
Рис.3.26. Полученная в результате вычислительного эксперимента высота
отрыва колёс задних ходовых тележек башенного крана КБ-408.21 в результате
наезда на безударные ТУП при расположении стрелы крана вдоль направления
движения крана: а- графики высоты отрыва колёс по времени в зависимости от
различных грузовых и скоростных эксплуатационных параметров наезда крана:
1- Vкр=0,3 м/с, mгр =1т, Lв=16м; 2- Vкр=0,3 м/с, mгр =10т, Lв=16м;3- Vкр=0,3 м/с,
mгр =1т, Lв=40м;4- Vкр=0,3 м/с, mгр =3т, Lв=40м;5- Vкр=0,9 м/с, mгр =10т,
Lв=16м; б-анимационный процесс отрыва колёс задних ходовых тележек
башенного крана при эксплуатационном состоянии (5): 1 - 8 – кадры
эксперимента
161
Как видно из графиков (рис.3.26 а), масса транспортируемого груза, также
как и расположение грузовой тележки с грузом на длине стрелы башенного крана,
играют решающее значение в отрыве задних ходовых колёс крана в процессе его
наезда на ТУП (см. параметры наезда (3) и (4), (1) и (2)). При этом, как показал
вычислительный эксперимент, отрыв задних колёс башенного крана не
происходит только при наезде крана на ТУП с параметрами наезда (1).
Вычислительные эксперименты были проведены также для наезда башенного
крана на безударные ТУП при расположении стрелы крана под 90º к направлению
движения крана. Так, при наезде крана на ТУП с параметрами Vкр=0,3 м/с, mгр
=10т, Lв=16м величина отрыва задних колёс составила 7 мм по сравнению с 10 мм
при наезде крана на ТУП с такими же параметрами, но с расположением стрелы
крана вдоль направления движения (см.рис.3.24 а). В свою очередь, это говорит о
том, что наиболее неблагоприятным наездом следует считать наезд башенного
крана на ТУП при расположении стрелы вдоль направления движения крана [99].
Помимо отрывов ходовых колёс башенного крана и их влияния на устойчивость
крана удалось определить пространственное напряжённое и деформированное
состояние м/к башенного крана в процессе наезда на безударные ТУП (рис.3.27).
Стоит отметить, что максимальные деформации башни и стрелы крана не
совпадают по времени из-за колебательных процессов, которые происходят в м/к
башенного крана во время наезда на ТУП. Колебательные процессы м/к
башенного крана представлены на рис.3.28 [100].
Таким образом, РМ башенного крана на основе численного метода анализа
МКЭ
позволила
предположительно
впервые
определить
теоретическое
пространственное поведение и инерционные процессы в м/к башенного крана КБ408.21 г/п 10 т в результате его наезда на безударные ТУП, что является важным
для понимания реальной устойчивости башенных кранов при наезде на
безударные ТУП. При этом метод вычислительного эксперимента показал, что
колебательные процессы происходящие в м/к башенного крана в процессе наезда
на ТУП являются неустойчивыми и не могут быть отражены плоскими моделями
с 2-3 степенями свободы [14].
162
а
б
Рис.3.27. Максимальное деформированное состояние м/к башенного крана КБ408.21 в результате наезда на безударные ТУП: а - деформированное состояние
башни крана; б - деформированное состояние стрелы крана: 1-Vкр=0,3 м/с, mгр
=1т, Lв=16м; 2- Vкр=0,3 м/с, mгр =1т, Lв=40м;3- Vкр=0,3 м/с, mгр =10т, Lв=16м;
4- Vкр=0,3 м/с, mгр =3т, Lв=40м;5- Vкр=0,9 м/с, mгр =10т, Lв=16м
163
а
б
Рис.3.28. Значения углов отклонений башни башенного крана КБ-408.21 в
результате наезда на безударные ТУП: а - 1- Vкр=0,3 м/с, mгр =1т, Lв=16 м; 2Vкр=0,3 м/с, mгр =10 т, Lв=16 м; 3- Vкр=0,3 м/с, mгр =1 т, Lв=40 м; 4- Vкр=0,3 м/с,
mгр =3 т, Lв=40 м; б - общее деформированное состояние м/к крана
164
Экспертной
деятельностью
автора
выявлены
случаи
разрушения
безударных ТУП башенных кранов и фактор их дальнейшего использование в
неисправном состоянии, несмотря на то, что последствия наезда на такие ТУП
могут быть не предсказуемы (рис.3.29).
а
б
Рис.3.29. Повреждаемость безударных ТУП башенных кранов:
а - деформированный ТУП; б - разрушенный ТУП
Таким образом, было исследовано напряженно-деформированное состояние
несущих элементов безударных ТУП геометрических размеров представленных
на рис. 3.30 при наезде на них башенного крана КБ-408.21 с максимальной
номинальной скоростью Vкр = 0,3 м/с и mгр = 10 т. Согласно результатам
вычислительных экспериментов наибольшие напряжения, которые возникают в
сварных швах коробчатого сечения ТУП в процессе наезда на них башенного
крана КБ-408.21, имеют значения близкие к пределу текучести материала стали
09Г2С (Т = 345 МПа). При этом, наиболее напряженной зонной ТУП следует
считать зону длиной L = 270 мм от начала ТУП (см. рис.3.30).
165
а
б
Рис. 3.30. Исследование напряженного состояния м/к безударных ТУП:
а – конструкция безударного ТУП: 1- основание; 2-направляющая; 3-диафрагма;
4-прижим; 5-ребро; 6-ручка;7-рельс; б- график напряженного состояния м/к ТУП
в зонах а, б , в при различных толщинах листов направляющих: 1 - 6 мм; 2 – 8 мм
166
Изначально рассматривался безударный ТУП у которого толщина листов
основных конструкционных элементов равнялась 6 мм (см. рис. 3.30а, поз. 1,2,5).
При этом, наибольшее значение из полученных напряжений, возникающих в
местах соединения направляющей (полки) и ребер (стенок), оказалось в начале
ТУП (см. рис. 3.30б: 1). Для уменьшения напряжений в м/к безударного ТУП
предлагается использовать направляющую с толщиной листа не менее 8 мм (см.
рис. 3.30б,поз.2). Также, в конструкции ТУП желательно использовать диафрагму
толщиной не менее 8 мм (см. рис. 3.30а, поз. 3), расположенную на расстоянии не
менее L = 270 мм от начала ТУП (см. рис. 3.30а, зона в), которое, согласно
результатам вычислительных экспериментов, соответствует наиболее частому
значению пройденного пути башенным краном по ТУП (см. рис. 3.24а).
Использование диафрагмы позволяет снизить напряженное состояние в данной
зоне ТУП в 1,6 раза.
В заключение следует указать, что, как показал вычислительный
эксперимент, исследуемые гравитационные ТУП с геометрическими параметрами
представленными на рис. 3.30, являются не достаточно надежным средством
гашения остаточной скорости башенного крана КБ-408.21 г/п 10 т. Рассмотрение
наезда башенного крана на ТУП на основе РМ отражающей действительную
конструкцию крана, в отличие от моделей с несколькими степенями свободы (см.
рис. 1.4 , 1.14), показало существование значительных инерционных сил (см.
рис.3.28 б), за счет которых в момент торможения механизмов передвижения
крана, верхняя часть башни со стрелой продолжает инерционное движение
вперед, что приводит к наклону всей конструкции крана.
Согласно
теоретическому расчету, опасным можно считать наезд башенного крана на
безударные ТУП с максимальной номинальной скоростью (Vкр=0,3 м/с) с грузом
более 1 т при любом вылете стрелы, так как при этом возникает отрыв задних
колес ходовых тележек крана и вероятность их последующего схода с рельсовых
путей. При этом потеря устойчивости и опрокидывание модели башенного крана
КБ-408.21 в результате наезда на безударные ТУП не было зафиксировано даже
167
при наиболее неблагоприятном режиме наезда в пределах максимальных
параметров согласно паспорту крана Vкр=0,3 м/с, mгр =3т, Lв=40м.
Полагаясь на результаты теоретического исследования наезда башенного
крана КБ-408.21 г/п 10 т на безударные ТУП в настоящей работе установлены
приближенные рабочие границы эксплуатационных состояний обеспечивающие
безопасную работу башенного крана вблизи безударных ТУП приведенные в
табл. 3.2.
Таблица 3.2. Ограничения на рабочие параметры наезда башенного крана КБ408.21 г/п 10 т на безударные ТУП
Скорость Масса
Вылет
Расположение
Допуск к работе
крана,
груза, т
стрелы, м
м/с
стрелы относительно крана
вблизи
КРП, град
безударного ТУП
≤ 0,3
≤1
< 40
≥0
допускается
< 0,3
< 10
< 20
≥0
допускается
0,3
>1
≤ 40
≥0
запрещается
Согласно результатам теоретических исследований по наезду башенного
крана КБ-408.21 на безударные ТУП типа представленного на рис. 3.30, можно
сделать вывод о том, что при наезде со скоростью не превышающей номинальной
скорости крана
(Vкр = 0,3 м/с) переезд краном через безударные ТУП
маловероятен. При этом важным остаются процессы наезда башенного крана на
безударные ТУП под воздействием ветровой нагрузки, так как ТУП в данном
случае могут быть неэффективным средством защиты по причине переезда крана
через ТУП в связи с большими ускорениями. Как показал вычислительный
эксперимент, при скорости движения крана Vкр = 0,9 м/с существует вероятность
переезда краном через ТУП, потеря устойчивости и падение крана.
168
3.4. Сравнительный анализ влияния столкновения кранов с тупиковыми
упорами на параметры НДС их металлоконструкций
3.4.1. Общие положения
Принято считать, что в оценку надёжности и качества машинных расчетов
конструкций кранов МКЭ значительный вклад вносят неопределенности,
наиболее характерными из которых являются расчетные сочетания нагрузок и
поиск наиболее невыгодного нагружения крана. Так, по рекомендации С.А.
Соколова [79] со ссылкой на наиболее консервативную работу [88] по индексу
«IIb» расчетные
разгон или торможение механизмов передвижения крана (МПК),
сочетания
нагрузок
на
мостовые
краны
являются
самыми
невыгодными.
Таблица 3.3. Расчетное сочетание нагрузок для расчета металлической
конструкции мостового (IIb) и портального (IId) кранов в режиме движения [79]
Нагрузка
Расчетный случай II
Комбинация нагрузок
IIb
IId
Вес элементов крана (и тележки)
G k 2Gi (T )
G k 2Gi
Qk 2GQ
QkT2GQ
Угол отклонения канатов от вертикали
_
Силы инерции при работе механизма изменения
вылета стрелы
_
a2
_
Силы инерции при работе механизма поворота
_
_
F Fy 2
Fm 2
Усилия перекоса
T T2
T Td 2
Ветровая нагрузка
Pwb
Pwd
T
Вес полезного транспортируемого краном груза
Силы инерции при
передвижения крана
работе
механизмов
T
T
Примечание к табл. 3.3. Gi(T) –вес соответствующих элементов; GQ - вес груза массой, равной
номинальной грузоподъемности; γ- коэффициенты перегрузок для соотвествующих нагрузок; kT –
коэффициенты толчков при движении крана; Fy – горизантальные силы инерции от движения крана. Во
всех условных обозначениях индексы «1», «2» или «3» означают, что соответствующая величина
вычисляется по данным I, II или III расчетных случаев.
169
Как это следует из табл. 3.3, к перечню неопределенностей следует отнести
расчетные, кроме традиционных, максимальные перекосные нагрузки при пуске
или торможении мостового или портального кранов, возникающие при отказе
всех или части приводов МПК, расположенных с одной из сторон, а также
максимальные ненормируемые технологические нагрузки, возникающие при
типичных отклонениях от нормального режима эксплуатации кранов, в том числе
исследуемые в настоящей работе - нагрузки возникающие при столкновении
кранов с препятствиями, которые, как видно из табл. 3.3, должны быть учтены в
нагрузках от сил инерции при работе механизмов передвижения крана.
3.4.2. Расчетный анализ НДС металлоконструкций грузоподъёмных кранов
на сочетания эксплуатационных нагрузок
Напряженно-деформированное состояние (НДС) расчетной модели крана
обусловлено действием разного рода нагрузок, приложенных как к узлам, так и к
межузловым сечениям КЭ. Такие нагрузки называются сосредоточенными и
обусловлены действием сосредоточенных сил и масс. Однако ряд нагрузок по
физическому
смыслу
является
распределенными
-
собственный
вес,
температурные воздействия. В рамках конечно-элементной модели (КЭМ)
распределенные нагрузки должны быть приведены к узловой нагрузке.
Совокупность сосредоточенных и распределенных нагрузок обуславливает
эксплуатационные нагрузки, действующие на узел расчетной модели, т.е.
{r }7 {rу }7 {rр }7 ,
(3.9)
где {rу }7 - сосредоточенные узловые нагрузки; {rр }7 - межузловые распределенные
нагрузки различной природы, приведенные к узловым.
В
общем
случае
сосредоточенные
узловые
нагрузки
могут
быть
обусловлены действием сосредоточенных сил и моментов и присутствием в
системе сосредоточенных масс и массовых моментов:
{rу }7 {rуp }7 {rуm }7 ,
(3.10)
где {rуp }7 - вектор сосредоточенных узловых сил и моментов; {rуm }7 - вектор
170
сосредоточенных масс и массовых моментов. Вектор КЭ {rуp }7 формируется в
ОСК и имеет вид:
{rуp }7 {Px Py Pz M x M y M z B}T ,
(3.11)
где Р и М - узловые сосредоточенные силы и моменты, соответственно, по осям и
вокруг осей ОСК; В - бимомент.
Вектор {rуm }7 определяет нагрузку от присутствующих в узле расчетной
модели сосредоточенных масс и массовых моментов, а при динамических
расчетах инерциальную нагрузку на узел КЭМ. Вектор {rуm }7 формируется в ОСК
и имеет вид:
{rуm }7 {0 0 Pzm M xm M ym M zm 0}T ,
(3.12)
где Pzm mg ; m - сосредоточенная масса; g=9,81 м/с2 - ускорение силы тяжести;
M xm( y ,z ) - сосредоточенные массовые моменты и моменты приведенных масс
вокруг осей ОСК.
Статический расчет предназначен для определения перемещений узлов под
действием статических (эксплуатационных) нагрузок на конструкцию. Вектор
перемещений узлов {v} n-го порядка находится как решение системы линейных
алгебраических уравнений следующего вида:
[ K ]{V} {Rст } ,
(3.13)
где {Rст} - вектор статических (эксплуатационных) нагрузок; {V} - вектор
перемещений узлов; [K] - матрица жесткости.
Решение (5) находится известными численными методами решения систем
линейных уравнений, например, методом Гаусса или путем факторизации
матрицы [K] (треугольного разложения по схеме Холецкого) [101].
Вектор узловых перемещений {V}, найденный как решение уравнения
(3.13), устанавливает деформации, возникающие в КЭ под действием внешней
нагрузки. Для стержневых КЭ jk деформации определяются в МСК по формуле:
jk
jk
,
{v}Oxyz
[T ]1414 {v}OXYZ
(3.14)
171
jk
jk
где {v}Oxyz
- вектора узловых перемещений стержневого КЭ в МСК и ОСК,
,{v}OXYZ
соответственно, выделенные из {V}; [T]14x14 - матрица преобразования координат
ОСК в MСК.
По полученным из (3.14) деформациям вычисляются внутренние усилия,
возникающие в стержневом КЭ под действием внешней нагрузки:
jk
,
{Q} jk [ s ]1414 [k ] jk {v}Oxyz
(3.15)
где [k]jk - матрица жесткости КЭ скорректированная с учетом закрепления узлов;
jk
- вектор узловых перемещений КЭ в МСК; [s]14x14 - знаковая матрица
{v}Oxyz
блочного вида:
[E]77 [0]77
[s]1414
,
[0]77 [ E]77
(3.16)
где [E], [0] - единичная и нулевая матрицы соответственно.
Описанная схема статического расчета является линейной и не учитывает
обратную связь - влияние деформаций КЭ на матрицу жесткости, что в случае
больших нагрузок и податливых конструкций может привести к существенным
погрешностям. Более точным в этом отношении является статический расчет
конструкции по деформированной схеме, заключающийся в учете геометрической
нелинейности систем со сжато (растянуто) - изогнутыми элементами.
Деформационный
расчет
проводится
методом
последовательных
приближений и представляет собой итерационную процедуру, на каждом шаге
которой решается статическая задача:
[ K (Qi )]i {V}i 1 { Rст } ,
(3.17)
где [K(Qi)]i- матрица жесткости, полученная с учетом смещений узлов {V}i на i-ом
шаге расчета ({V0}=0).
Расчет общей деформационной матрицы жесткости [K(Qi)]i строится на
основе вычисления матриц КЭ с учетом возникающих в них внутренних усилий
от перемещений узлов. При расчете [K]0 на 1-м шаге вектор внутренних усилий
принимается нулевым: {Q}0=0. На каждом следующем шаге вектор внутренних
усилий каждого КЭ вычисляется по (3.17) с учетом узловых перемещений
172
полученных на текущем шаге итерации.
Полученные на текущем шаге с помощью (3.17) компоненты вектора
внутренних усилий
Nz, M x,M y,M z, B
используются для расчета деформационной
матрицы жесткости i-го КЭ [k]i и формирования из таких матриц общей
деформационной матрицы жесткости [K(Qi)]i .
Деформационный расчет заканчивается, когда для любого k = 1…n, где n порядок вектора {V}, будет выполняться условие:
Vk ,i 1 Vk ,i
Vk ,i
EPS ,
(3.18)
где EPS - заданная относительная точность деформационного расчета.
Результатом поверочного статического расчета по недеформированной и
деформированной схемам является полный вектор перемещений узлов РМ {V} и
вектор внутренних усилий в каждом КЭ от нагрузок {Q}, по которым могут быть
вычислены эквивалентные напряжения по любой теории прочности.
Условие прочности металлоконструкции крана при расчете на сочетание
эксплуатационных нагрузок и динамического воздействия при наезде на ТУП:
экв R y c ,
(3.19)
где R y - расчетное сопротивление; c - коэффициент условий работы [81].
3.4.3. Результаты расчётов НДС металлоконструкций грузоподъёмных
кранов
Основные технические характеристики и общий вид РМ мостового,
портального и башенного грузоподъемных кранов приведены в гл.2.
Нагрузки от собственного веса КЭ металлоконструкций кранов задавались
в соответствии с плотностью стали ρст=7850 кг/м3, для стержневых конечных
элементов и канатов – площадью поперечного сечения и длиной, для пластин –
площадью и толщиной. Линейная распределённая весовая нагрузка определялась
для каждого КЭ. Максимальная горизонтальная инерционная нагрузка на
конструкцию при разгоне (торможении) крана массой Mi c ускорением
173
(замедлением) ami с учётом динамического коэффициента определялась согласно
[79] как F y 2 2 a m i M i . Ветровая нагрузка Pw и усилие перекоса
T
не учитывались
при расчете. Нагрузки от сосредоточенных масс, распределенной весовой
нагрузки и горизонтальной силы инерции на металлические конструкции
мостового, портального и башенного кранов приведены на рис. 3.31. Отклик РМ
г/п кранов на приложение нагрузок расчетного сочетания IIb и IId показан на рис.
3.32.
Для комбинации нагрузок вычислялись эквивалентные напряжения экв
(2.14) по теории прочности фон-Мизеса (IV теория прочности) и сравнивались с
напряжениями отдельных, наиболее нагруженных элементов конструкции кранов,
полученных в динамическом анализе процесса наезда на ТУП (см. рис. 2,4,6).
Рис. 3.31а. Схема приложения нагрузок расчетного сочетания IIb на мостовой
кран г/п 15/3 т
174
Рис. 3.31б. Схема приложения нагрузок расчетного сочетания IId на портальный
кран «ABUS» г/п 10 т
175
Рис. 3.31в. Схема приложения нагрузок расчетного сочетания IId [48] на
башенный кран КБ-408.21 г/п 10 т
176
Рис.3.32а. Отклик РМ мостового крана г/п 15/3т на приложение нагрузок
расчетного сочетания IIb (см. рис.3.31а): 1-недеформированное состояние;
2 –деформированное состояние (перемещения увеличены в 5 раз); I, II –зоны
анализа сравнительных напряжений
Зона I
Соединение главной балки с концевой
Зона II
Середина нижнего пояса главной балки
Рис.3.32б. Зоны наиболее нагруженных элементов м/к мостового крана г/п 15/3 т
(см. рис.3.32а)
177
Таблица 3.4. Результаты статических и динамических расчетов мостового
крана г/п 15/3 т
№ КЭ
17688
10162
16736
8172
Максимальные
эквивалентные Максимальные
эквивалентные Динамический
динамического коэффициент
напряжения статического расчета напряжения
д
с
д
(разгон или торможение расчета экв
(наезд крана на max экв
экв
kд с
крана), Па
ТУП), Па
экв
3,8475e+007
3,5062e+007
2,9925e+007
2,7243e+007
1,5199e+008
1,3329e+008
8,7588e+007
7,5968e+007
3,95
3,80
2,93
2,79
Рис.3.33а. Эквивалентные напряжения в элементах металлоконструкции
главных балок мостового крана г/п 15/3 т в КЭ № 17688 (см. рис. 3.32б: зона I)
Рис.3.33б. Эквивалентные напряжения в элементах металлоконструкции
главных балок мостового крана г/п 15/3 т в КЭ № 16736 (см. рис. 3.32б: зона II)
178
Рис.3.34а. Отклик РМ портального крана «ABUS» г/п 10т на приложение
нагрузок расчетного сочетания IId (см. рис.3.31б): 1-недеформированное
состояние; 2 –деформированное состояние (перемещения увеличены в 5 раз);
I, II, III, IV –зоны анализа сравнительных напряжений
179
Зона I
Хобот
Зона III
Оттяжка стрелы
Зона II
Живот стрелы
Зона IV
Механизм изменения вылета стрелы
Рис.3.34б. Зоны наиболее нагруженных элементов м/к портального крана
«ABUS» г/п 10 т (см. рис.3.34а)
Таблица 3.5. Результаты статических и динамических расчетов портального
крана «ABUS» г/п 10 т
эквивалентные
Максимальные
эквивалентные Максимальные
напряжения статического расчета напряжения
динамического
№ КЭ
с
д
(разгон или торможение расчета экв
(наезд крана на
экв
крана), Па
ТУП), Па
21098
21101
21121
9424
12469
14588
1,7101e+008
1,4815e+008
1,4389e+008
5,3932e+007
1,2716e+008
4,2515e+007
2,3708e+008
1,9956e+008
1,9233e+008
6,6371e+007
1,6711e+008
5,1731e+007
Динамический
коэффициент
k
max
д
д
экв
с
экв
1,39
1,35
1,34
1,23
1,31
1,22
180
Рис.3.35а. Эквивалентные напряжения в элементах металлоконструкции
нижнего пояса хобота портального крана «ABUS» г/п 10 т в КЭ № 21098
(см. рис. 3.34б: зона I )
Рис.3.35б. Эквивалентные напряжения в элементах металлоконструкции
оттяжки стрелы портального крана «ABUS» г/п 10 т в КЭ № 14588 (см.
рис. 3.34б: зона III)
Рис.3.35в. Эквивалентные напряжения в элементах металлоконструкции МИВС
портального крана «ABUS» г/п 10 т в КЭ № 12469 (см. рис. 3.34б: зона IV)
181
Рис.3.36а. Отклик РМ башенного крана КБ-408.21 г/п 10 т на приложение
нагрузок расчетного сочетания IId (см. рис.3.31в): 1-недеформированное
состояние; 2 –деформированное состояние (перемещения увеличены в 5 раз);
I, II, III, IV –зоны анализа сравнительных напряжений
182
Зона I
Узел крепления грузового каната и каната стрелового расчала
Зона II
Крепления пояса башни
к траверсам корзины
Зона III
Шарниры башни и раскосов
Рис.3.36б. Зоны наиболее нагруженных элементов м/к башенного крана КБ408.21 г/п 10 т (см. рис.3.36а)
Таблица 3.6. Результаты статических и динамических расчетов башенного
крана КБ-408.21 г/п 10 т
эквивалентные
Максимальные
эквивалентные Максимальные
динамического
напряжения статического расчета напряжения
№ КЭ
с
д
экв (разгон или торможение расчета экв (наезд крана на
крана), Па
ТУП), Па
11391
11322
7116
7121
7133
7141
3742
2892
3564
2589
3,2713e+007
1,2325e+008
1,0416e+007
8,6293e+006
4,9157e+007
4,7221e+007
1,3955e+008
1,3402e+008
5,6891e+007
6,0516e+007
3,5302e+007
1,4978e+008
1,1942e+007
9,8943e+006
5,5931e+007
5,2218e+007
1,7027e+008
1,6281e+008
6,1316e+007
6,7283e+007
Динамический
коэффициент
k
max
д
д
экв
с
экв
1,08
1,21
1,15
1,12
1,12
1,11
1,22
1,21
1,08
1,11
183
Рис.3.37а. Эквивалентные напряжения в элементах металлоконструкции стрелы
башенного крана КБ-408.21 г/п 10 т в КЭ № 11322(см. рис. 3.36б: зона I)
Рис.3.37б. Эквивалентные напряжения в элементах металлоконструкции башни
башенного крана КБ-408.21 г/п 10 т в КЭ № 7133 (см. рис. 3.36б: зона II)
Рис.3.37в. Эквивалентные напряжения в элементах металлоконструкции
поворотной платформы башенного крана КБ-408.21 г/п 10 т в КЭ № 3742 (см.
рис. 3.36б: зона III)
184
Проведёнными исследованиями установлено, что для учета нагрузок на
металлоконструкции г/п кранов возникающих в результате их наезда на ТУП при
оценке предельного состояния кранов по IIb и IId расчетным комбинациям
нагрузок (см. табл. 3.3), автором работы предлагается введение дополнительного
динамического коэффициента повышения напряжений в опасных сечениях м/к
грузоподъёмных кранов, в частности, до 4 для мостовых кранов, до 1,4 для
портальных и до 1,22 для башенных кранов.
Существующие нормативные документы, по мнению автора настоящей
работы, должны ввести коэффициенты учета нагрузок от наезда кранов на ТУП в
расчетные сочетания нагрузок по IIb и IId для оценки несущей способности
конструкции кранов.
В местах возникновения наибольших напряжений в металлоконструкциях
г/п кранов (см. рис.3.32б, 3.34б, 3.36б), возникающие по причине их наезда на
ТУП, требуются усиления. При этом, согласно результатам проведенных
исследований, наиболее чувствительными на процесс наезда на ТУП будут
являться металлоконструкции мостовых и портальных кранов.
Вклад нагрузок от наезда г/п кранов на ТУП должен учитываться при
оценке предельного состояния кранов по II или III расчетным комбинациям
нагрузок принятыми проектировщиками кранов.
3.5. Выводы к главе 3
Проведена серия вычислительных экспериментов на основе численного
метода анализа - МКЭ по наезду РМ отражающих действительную работу м/к
мостового, портального и башенного г/п кранов на ударные и безударные ТУП.
В результате теоретических исследований процесса наезда г/п кранов на
ТУП удалось установить следующее:
1. Получена полная картина НДС м/к двухбалочного мостового крана г/п
15/3 т в процессе его наезда на ударные ТУП. Результаты вычислительных
экспериментов подтвердили отдельный вклад ударного взаимодействия мостовых
кранов с ТУП в общее НДС их металлоконструкций.
185
2. Исследовано поведение резиновых буферов марки БР в процессе наезда
двухбалочного мостового крана г/п 15/3 т на ударные ТУП. Теоретически удалось
определить реальную поглощаемую энергию буфером БР-200 в результате
ударного
взаимодействия
эксплуатационных
мостового
состояниях
крана
крана.
По
с
ТУП
при
результатам
различных
вычислительных
экспериментов предложена корректировка формулы из ОСТ 24.191.37-78 по
расчету и выбору резиновых буферов мостовых кранов г/п до 50 т.
3. Получено пространственное НДС портального крана «ABUS» г/п 10 т в
зависимости от различных эксплуатационных состояний наезда на ударные ТУП.
4. Исследовано поведение резиновых буферов марки БР в процессе наезда
портального крана «ABUS» г/п 10 т на ударные ТУП. Определена действительная
поглощаемая энергия буфером БР-200 в результате ударного взаимодействия
портального крана с ТУП при различных эксплуатационных состояниях крана.
Опираясь
на
результаты
вычислительных
экспериментов,
предложены
аналитические формулы по расчету и выбору резиновых буферов марки БР для
портальных кранов.
5. Результаты вычислительных экспериментов показали, что даже при
соблюдении всех требований
используются
подъёмные
правил безопасности ОПО на которых
сооружения
кинетическая
энергия
кранов
воспринимаемая резиновыми буферами в тупиковых участках пути превышает, по
крайней мере вдвое, энергоемкость буферов, что на практике приводит к
разрушениям буферов, ТУП и оказывает неблагоприятное влияние на м/к как г/п
кранов, так и на м/к подкрановых конструкций.
6.
Получено
НДС
и
характеристики
устойчивости
положения
в
пространстве башенного крана КБ-408.21 г/п 10 т в зависимости от различных
эксплуатационных
состояний
наезда
на
безударные
ТУП.
Результаты
вычислительных экспериментов показали важность учета действительной м/к
башенного крана в задаче его наезда на безударные ТУП. Установлено что,
динамические процессы наезда башенных кранов на безударные ТУП не могут
быть отражены упрощенными моделями с несколькими степенями свободы.
186
Показано, что существующие безударные ТУП типа представленного на рис. 3.30
являются не достаточно надежным противоаварийным средством гашения
остаточной скорости башенного крана, а также, что наезд на них с номинальной и
выше скоростью не безопасен.
7. Определен динамический коэффициент повышения напряжений при
сравнении НДС металлоконструкций г/п кранов полученного по IIb и IId
расчетным случаям с НДС полученного в результате динамического анализа
наезда кранов на ТУП, который для мостовых кранов равен 4, для портальных
кранов - 1,4 и башенных кранов – 1,22. Показано, что при оценке предельного
состояния г/п кранов нагрузки от наезда на ТУП должны быть учтены в II и III
комбинациях расчетных сочетаний нагрузок в разделе нагрузок от сил инерции
при работе механизмов передвижения крана.
187
Глава 4. Экспериментальное исследование динамических
процессов при наезде грузоподъёмных кранов на ударные и
безударные тупиковые упоры
4.1. Экспериментальное исследование механических свойств буфера БР-200
4.1.1. Модель Муни – Ривлина несжимаемого материала резины
Потенциальная функция W (потенциал или функция энергии деформации)
гиперупругого материала Муни – Ривлина [57] с двумя параметрами C1 и C 2
определяется в терминах независимых инвариантов I1 , I 2 , I3 тензора деформаций
Коши-Грина как
W C1( I1 3) C2 ( I 2 3) 0,5k ( I3 1)2 ,
где
(4.1)
C1 и C 2 - константы Муни – Ривлина; 0,5k – параметр несжимаемости
материала, где k E / [3(1 2 )] ; E, μ – модуль Юнга и коэффициент Пуассона
соответственно.
Инварианты I1 , I 2 , I3 в (4.1) могут быть представлены в виде значений
деформаций как
I1 xx2 yy2 zz2 ;
(4.2)
I 2 xx2 yy2 yy2 zz2 zz2 xx2 xy4 yz4 zx4 ;
(4.3)
I 3 xx2 yy2 zz2 2xy2 yz2 zx2 xx2 yz4 yy2 zx4 zz2 xy4 ,
(4.4)
где d / d 0 - степень деформации; d - размер деформированного образца; d 0 размер недеформированного образца.
При рассмотрении чистого деформирования материала резины без
сдвиговых деформаций, согласно целям настоящего исследования, инварианты
(4.3), (4.4) не будут включать в себя элементы сдвига, таким образом, (4.3) и (4.4)
перепишутся в виде
I 2 xx2 yy2 yy2 zz2 zz2 xx2 ;
(4.5)
188
I 3 xx2 yy2 zz2 .
(4.6)
Особенностью резины является её слабая сжимаемость, при которой
сопротивляемость объемным деформациям на несколько порядков выше
сопротивляемости сдвиговым деформациям, при этом коэффициент Пуассона μ
материала близок к 0,5 (μ = 0,485 – 0,499), а прямое использование таких значений
в расчетах приводит к появлению плохо обусловленных матриц жёсткости, что в
свою очередь приводит к появлению больших погрешностей в результатах
вычислений и невозможности их практического использования.
Поэтому, наиболее эффективным, в плане получения практических
результатов, показал себя метод при котором резина считается абсолютно
несжимаемым материалом, то есть коэффициент Пуассона принимается равным μ
= 0,5.
Условие несжимаемости материала резины формулируется согласно (4.6)
как
I 3 xx2 yy2 zz2 = 1,
(4.7)
тогда выражение потенциальной функции (4.1) примет вид
W C1 ( I1 3) C 2 ( I 2 3) .
(4.8)
Константы Муни – Ривлина C1 , C 2 являются по сути модулями упругости
для резинового материала подобно модулю упругости для стали и определяются
из данных экспериментальных исследований материала представленных на рис.
4.1.
Важно отметить, что согласно [102] для наиболее точного определения
констант Муни - Ривлина необходимо иметь данные всех экспериментальных
исследований материала. Однако, если известно заранее какой вид деформации
материала будет моделироваться в конкретной задаче, лучше всего провести
испытания материала только на этот вид деформации.
Например, если
моделируется только напряженное состояние материала при сжатии, достаточно
провести испытание материала на одноосное сжатие или на двухосное
растяжение.
189
Рис.4.1. Виды механических испытаний образцов
Для одноосного растяжения (сжатия) величина напряжения в материале с
учетом двух неизвестных параметров C1 и C 2 будет определяться как:
1 2(12 11 )(C1 C211 ) .
(4.9)
Константы Муни-Ривлина для гиперупругого материала определяются
путем минимизации среднеквадратичного отклонения между диаграммой
напряжения - деформации, полученной экспериментально и определенной по
уравнению (4.9).
В работе [103] приведен вывод констант Муни – Ривлина для
двухпараметрической модели на основе предположения одноосного растяжения
190
(сжатия) гиперупругого материала резины ( yy zz xx1/2 ), при этом константы
для (4.9) имеют следующий вид:
n
C1
2
i
i
i 1
n
2
i
1 2
i
1
i
n
i 1
n
2
i
1 2
i
1
i i
2
i
2
2
i
i 1
2
i
1
i 1 i
n
2
i 1 i
1 2
i
2
i
1 2
i
2
i
1 2
i
2
i
1 2
i
)
;
1 2
i
n
(4.10)
2
i
1
i
( ) ( ) ( )
2 ( ) ( ) 2 ( )
( ) ( )
1
( ) ( )
i 1
n
C2
n
1
i 1 i
n
1
i
( ) C (
2 ( )
( )
2
i 1 i
2
i
1 2
i
n
1
i 1 i
n
2
i 1 i
n
1
2
i
i 1 i
n
2
i
i 1
i 1 i
n
2
i
i 1
1 2
i
1 2
i
,
(4.11)
1 2
i
где i - главная степень деформации в i - ом направлении ( xx 1; yy 2 ; zz 3
), определяемая экспериментально так, что i i 1 , где - величина
относительного удлинения образца; i - экспериментальное значение напряжения
возникающее в образце.
Матрица упругости [D] объемного конечного элемента, например,
тетраэдра, имеет следующий вид
D11
D сим
D12
D22
D13
D23
D14
D24
D15
D25
D33 D34
метр ично D44
D35
D45
D55
D16
D26
D36
.
D46
D56
D66
(4.12)
Опираясь на значения компонентов Dij матрицы [D] полученные в [57] для
модели Муни - Ривлина абсолютно несжимаемого нелинейно-упругого материла
резины с учетом только одноосного растяжения (сжатия) имеют вид:
D11 d12 , D12 f3 d1d 2 , D13 f 2 d1d 3 , D14 0, D15 0,
D16 0, D22 d 22 , D23 f1 d 2 d 3 , D24 0, D25 0, D26 0,
D33 d 32 , D34 0, D35 0, D36 0, D44 f3 / 2, D45 0,
D46 0, D55 f 2 / 2, D56 0, D66 f1 / 2.
Здесь, в (4.13), приняты значения:
(4.13)
191
d1 2232 , d 2 1232 , d 3 12 22 , 6(C1 C2 )
1
,
(1 )(1 2 )
f1 4C2 212 (2C1 4C2 ), f 2 4C2 222 (2C1 4C2 ), f3 4C2 232 (2C1 4C2 ).
Для вычисления по полученным формулам значений коэффициентов МуниРивлина необходимо располагать экспериментальными данными.
В связи с отсутствием информации об экспериментальных исследованиях
по статическому (динамическому) сжатию буферов марки БР необходимой для
того, чтобы точно смоделировать буфер БР-200 (см. рис. 2.12) в конечноэлементной модели мостового крана г/п 15/3 т (см. рис. 2.13 б) были проведены
экспериментальные исследования механических свойств резинового материала из
которого он изготовлен.
Согласно информации, которую предоставил производитель данного
буфера, известно, что буфер изготовлен из морозостойкой резины марки 7ИРП18-1348 по ТУ2500-376-00152106-94 [51] с пределом прочности при растяжении 4
МПа и относительном удлинении 200%.
Испытания буфера БР-200 проводились на базе лаборатории по изучению
износов и испытаниям материалов Астраханского филиала ФГОУ ВПО
«Волжская государственная академия водного транспорта» (г. Астрахань) и
лаборатории неразрушающего контроля ОАО ПСК «Строитель Астрахани».
Экспериментальная установка по сжатию буфера (рис.4.2) представляет
собой пресс с максимальным усилием до 125 тонн. Замеры деформаций буфера
при сжатии проводились измерительной линейкой.
Путем многократного (5 раз) статического сжатия буфера была получена
характеристика зависимости деформаций буфера от внешне приложенной
нагрузки.
Напряжения были определены, как отношения сил осадки к
фактической площади поверхности контакта рабочего инструмента с буфером,
которая так же подвергалась измерению в ходе выполнения эксперимента. На
основе
полученных данных была построена графическая
напряжений
возникающих
в
буфере
БР-200
от
зависимость
деформаций
сжатия,
представленная на рис.4.3. После снятия внешней нагрузки буфер практически
192
полностью восстановил свои первоначальные геометрические размеры с
величиной остаточной деформации ост ≈ 0,003 м.
Рис.4.2. Электрический пресс с максимальным усилием до 125 т в лаборатории
неразрушающего контроля ОАО ПСК «Строитель Астрахани»
193
а
б
Рис.4.3. Экспериментальное исследование механических свойств буфера БР-200:
а- процесс статического сжатия буфера: зона появления трещин;
б – полученная графическая зависимость напряжений в материале буфера (σ) от
деформаций (ε)
194
Для
определения
использовалась
параметров
программа
материала
ANSYS,
которая
(констант
Муни-Ривлина)
располагает
графическим
инструментом подбора аппроксимирующих кривых, опираясь на данные
экспериментальных исследований.
На рис. 4.4 представлено сравнение
аппроксимирующей кривой, полученной путем подсчета констант гиперупругого
материала, с графиком полученным в результате эксперимента. Из рис. 4.4 видно,
что теоретическая и экспериментальная кривые хорошо совпадают на всем
диапазоне изменения деформаций. Таким образом, можно сделать вывод о том,
что выбранная функция энергии деформации Муни–Ривлина (4.1) с найденными
константами достаточно точно описывает гиперупругий материал резинового
буфера и может использоваться для процесса моделирования наезда г/п кранов с
резиновыми буферами на ТУП.
Рис.4.4. Сравнение зависимостей напряжений () от деформаций ()
полученных теоретически и экспериментально: 1 - аппроксимирующая кривая;
2 – график полученный в результате эксперимента
195
4.2. Экспериментальное исследование наезда мостового крана на ударные
тупиковые упоры
Для проверки адекватности поведения РМ резиновых буферов БР-200
действительным буферам в процессе динамического наезда мостового крана на
ударный ТУП были проведены серии натурных экспериментов. Эксперименты
проводились в условиях ОАО ПСК «Строитель Астрахани» на мостовом кране г/п
15/3 т зав. №6860 рег.№39039 в пролете №1 склада готовой продукции (СГП).
Мостовой кран наезжал на ТУП со скоростью Vкр = 1,3 м/с без
транспортируемого груза (mгр = 0 т) при расположении грузовой тележки в
середине пролета моста крана (1/2Lпр). Перемещение движущегося мостового
крана фиксировалось с помощью видеокамеры (SONY HXR-NX5E) в режиме
высокоскоростной киносъёмки (100 кадров/сек.). Для измерения скорости
движения мостового крана и величины деформации резинового буфера
использовалась измерительная линейка установленная за ТУП, значения на
которой в каждую долю секунды фиксировались видеокамерой.
Согласно
полученным
экспериментальным
значениям
общее
время
ударного наезда на ТУП составило 0,26 с, что оказалось достаточным для полного
динамического сжатия и восстановления резинового буфера БР-200 (рис.4.5). В
результате
серии
проведенных
натурных
экспериментов
была получена
динамическая зависимость деформации буфера БР-200 от времени наезда
мостового крана на ТУП. Сравнение значений деформаций буфера БР-200
полученных
в
результате
представлено на рис. 4.6.
натурных
и
вычислительных
экспериментов
196
а
б
Рис.4.5. Исследование поведения буфера БР-200 при наезде мостового крана г/п
15/3 т на ТУП: а - натурный эксперимент в условиях ОАО ПСК «Строитель
Астрахани»; б - вычислительный эксперимент: 1,2,3 – наезд крана на ТУП;
4,5,6 – откат крана
197
Рис.4.6. Зависимость деформации буфера БР-200 от времени в процессе
наезда мостового крана г/п 15/3 т на ТУП (Vкр = 1,3 м/с, mгр=0 т): 1 – результат
натурного эксперимента; 2 – результат вычислительного эксперимента
Согласно
результатам
вычислительного
эксперимента
максимальное
значение деформации буфера составило 82 мм на времени 0,13 с, в то время как
по результатам натурных экспериментов данное значение составило 75 мм на
времени 0,11 с. Поскольку расхождение полученных значений деформаций
буфера (по всему графику) составило менее 9%,
это говорит о хорошей
сходимости вычислительного эксперимента с натурным. При том стоит отметить,
что наибольшая сходимость вычислительного эксперимента оказалась в фазе
сжатия по сравнению с фазой восстановления буфера. Прежде всего, это может
быть связано с расхождением демпфирующих характеристик буфера в
действительной конструкции и в конечно-элементной модели. Также влияние мог
оказать момент времени в который крановщик выключает МПК в момент наезда
крана на ТУП. Значение данной величины постоянно менялось во время
экспериментов по сравнению с вычислительным экспериментом в котором данная
величина имеет постоянное значение. Эксплуатационное состояние м/к мостового
крана, также как и поддерживающей конструкции, тоже могли повлиять на
результаты экспериментов.
198
По результатам натурных экспериментов удалось также получить картину
изменения скорости мостового крана в процессе наезда на ТУП, что является
важным для оценки поведения м/к крана в процессе взаимодействия с ТУП (рис
4.7). Согласно результатам натурного эксперимента, кран полностью погасил
свою скорость через 0,114 с, что хорошо согласуется с максимальным сжатием
буфера в момент времени 0,11 с (см. рис.4.6). При этом значение времени полного
торможения мостового крана, полученного в вычислительном эксперименте
равняется 0,126 с. Такое различие в значениях времени торможения мостового
крана в натурном и вычислительном экспериментах также может быть связано со
сторонними параметрами, влияющими на результат ударного взаимодействия
указанными ранее.
Несмотря на то, что результаты натурного эксперимента показали более
резкое торможение крана по сравнению с вычислительным экспериментом, на
обоих графиках видно, что кран ведет себя неустойчиво, прежде всего, из-за
ненагруженного состояния: отсутствия транспортируемого груза.
Вероятно,
наиболее опасным такой наезд будет представлять для параметров устойчивости
положения в пространстве грузовой тележки.
Рис.4.7. Изменение скорости наезда мостового крана г/п 15/3т на ТУП в
зависимости от времени (Vкр = 1,3 м/с, mгр=0 т): 1 – результат натурного
эксперимента; 2 – результат вычислительного эксперимента
199
4.3. Экспериментальное исследование наезда башенного крана на
безударные тупиковые упоры
Серия
натурных
экспериментов
была
проведена
для
определения
действительного поведения башенного крана КБ-408.21 в условиях ОАО ПСК
«Строитель Астрахани» в процессе наезда на безударные ТУП для проверки
адекватности
теоретических
исследований
методом
вычислительного
эксперимента описанных в гл.3. Поскольку проведение полного натурного
экспериментального исследования по наезду башенного крана на безударные
ТУП является не только опасным, но и дорогостоящим, основной целью
настоящего исследования стало определение тормозного пути пройденного
колесами ходовых тележек крана КБ-408.21 по безударному ТУП при
минимальных значениях эксплуатационных параметров наезда и сравнение
полученных
результатов
со
значениями
полученных
в
вычислительных
экспериментах.
По причине отсутствия какой либо информации в правилах и стандартах по
г/п кранам [80] касательно допускаемых эксплуатационных параметров, включая
ограничения по скорости, наезда башенных кранов на безударные ТУП, серии
натурных экспериментов проводились для крана КБ-408.21 в ненагруженном
состоянии при скорости меньшей номинальной (согласно паспорту крана). Таким
образом, башенный кран наезжал на безударные ТУП без транспортируемого
груза (mгр=0 т) со средней скоростью Vкр = 0,2 м/с при расположении стрелы
вдоль направления движения крана (рис.4.8).
В результате серии проведенных натурных экспериментов, удалось
получить среднее значение тормозного пути пройденного башенным краном по
безударному ТУП в зависимости от времени представленное на рис. 4.9. При тех
же эксплуатационных параметрах наезда были получены значения тормозного
пути с помощью вычислительного эксперимента (см. рис. 4.9).
200
а
б
Рис.4.8. Процесс наезда башенного крана КБ-408.21 на безударные ТУП:
а - натурный эксперимент в условиях ОАО ПСК «Строитель Астрахани»;
б - вычислительный эксперимент:1,2,3,4,5,6 – наезд крана на ТУП
201
Рис.4.9. Зависимость тормозного пути пройденного башенным краном КБ408.21 по безударным ТУП от времени наезда: 1 - результат натурного
эксперимента в условиях ПСК ОАО «Строитель Астрахани»; 2 – результат
вычислительного эксперимента
Согласно
результатам
натурных
экспериментов
башенный
кран
переместился по безударному ТУП погасив полностью свою скорость на
расстоянии 0,174 м за время 1,85 с. При этом время полного процесса «наездотъезд» башенного крана по безударному ТУП составило 3,3 с. Максимальный
пройденный тормозной путь башенным краном по безударному ТУП, согласно
вычислительному эксперименту, составил 0,156 м, что оказалось меньше
значения натурного эксперимента на 11%. Время общего процесса наезда
составило 2,9 с. Такое расхождение натурного эксперимента с вычислительным,
прежде всего, должно быть связано с отсутствием в РМ вращающихся масс и
заменой их теоретическими поверхностями трения с соответствующими
коэффициентами трения качения и скольжения, которые не могут с высокой
точностью учитывать реальную работу МПК (см. пп. 2.4.4). На конечный
результат также могло повлиять значение времени в которое крановщик
выключал МПК в момент наезда башенного крана на ТУП, которое было
непостоянным во время проведения натурных экспериментов.
202
Также
в
условиях
натурного
эксперимента
удалось
получить
характеристику изменения скорости башенного крана КБ-408.21 в процессе
наезда на безударные ТУП (рис. 4.10).
Важно также отметить, что результаты натурного эксперимента показали
менее плавное торможение башенного крана КБ-408.21 по сравнению с
вычислительным экспериментом (см. рис.4.10), что, в свою очередь, говорит о
вероятности существования бо́льших динамических нагрузок на м/к башенного
крана, чем определенных в пп. 3.3. При этом график вычислительного
эксперимента показывает более быстрое гашение скорости башенного крана во
время наезда на безударные ТУП и развитие меньшей скорости во время съезда с
безударных ТУП по сравнению с графиком натурного эксперимента, что еще раз
подтверждает влияние отсутствия вращающихся масс в РМ на конечные
результаты эксперимента.
Рис.4.10. Зависимость скорости наезда башенного крана КБ-408.21 на
безударные ТУП от времени: 1 - результат натурного эксперимента в условиях
ПСК ОАО «Строитель Астрахани»; 2 – результат вычислительного
эксперимента
203
В соответствии с вышесказанным, стоит отметить, что результаты
натурных экспериментов по определению основных характеристик процесса
наезда башенного крана на безударные ТУП хорошо согласуются с результатами
вычислительных экспериментов, что, в свою очередь, говорит об адекватности
поведения РМ башенного крана действительной конструкции крана.
4.4. Выводы к главе 4
Проведена серия натурных экспериментов по наезду мостового и
башенного кранов на ударные и безударные ТУП. По результатам экспериментов
были получены наиболее важные характеристики ударного и безударного наезда
г/п кранов на ТУП: значения скоростных параметров процесса наезда г/п кранов
на ТУП, значения деформаций резинового буфера БР-200 при ударном наезде
мостового крана г/п 15/3 т на ТУП и значения пройденного пути башенного крана
КБ-408.21 по безударным ТУП. Проведено сравнение результатов натурных и
вычислительных экспериментов. В результате экспериментальных исследований
получено:
1. Построена диаграмма статического сжатия буфера БР-200, определяющая
его точные механические свойства необходимые для построения нелинейной
конечно-элементной
модели
резинового
буфера.
Сравнение
полученной
аппроксимирующей кривой с диаграммой экспериментального сжатия буфера БР200 позволяет заключить, что вычисленные константы Муни-Ривлена позволяют
достаточно
точно
описать
гиперупругий
материал
резины
и
являются
пригодными в качестве исходных данных для проведения теоретических
расчётов, связанных с деформированием буфера БР-200.
2.
Получен
экспериментальный
график
зависимости
деформации
резинового буфера БР-200 от времени в процессе ударного взаимодействия
мостового крана г/п 15/3 т с ТУП. Сравнение полученного графика с результатами
вычислительных
сходимости
экспериментов
вычислительного
даёт
основание
эксперимента
с
утверждать
натурным
–
о
хорошей
расхождение
полученных значений деформаций буфера составило в среднем менее 9 %, при
204
этом наибольшая сходимость вычислительного эксперимента оказалась в фазе
сжатия по сравнению с фазой восстановления буфера. Такое расхождение
экспериментального и теоретического значений объясняется, прежде всего,
расхождением
демпфирующих
характеристик
буфера
в
действительной
конструкции и в конечно-элементной модели крана.
3. Получен экспериментальный график зависимости изменения скорости
мостового крана г/п 15/3 т по времени в процессе наезда на ТУП, позволяющий
оценить скоростное поведение крана. Полученный график достаточно точно
согласуется с графиком поведения деформации буфера БР-200 в процессе наезда
мостового крана на ТУП, а также со значениями вычислительного эксперимента
(расхождение с натурным экспериментом составило в среднем 9%), что даёт
основание полагать о хорошей сходимости результатов эксперимента и
теоретических расчётов, а также об адекватности поведения (процесса
торможения) РМ мостового крана его действительной конструкции.
4. Получен экспериментальный график зависимости процесса перемещения от
времени ходовых тележек башенного крана КБ-408.21 г/п 10 т по безударным
ТУП, что является важным для правильной оценки не только пространственного
поведения м/к башенного крана, но также и степени безопасности существующих
безударных ТУП. Согласно результату натурного эксперимента башенный кран
без транспортируемого груза со средней скоростью 0,2 м/с переместился по
безударному ТУП на расстояние 0,174 м, что оказалось на 11% меньше значения
полученного в вычислительном эксперименте (0,156 м). Такое расхождение
экспериментального и теоретического значений объясняется введением в РМ ряда
упрощений, прежде всего, отсутствие вращательных масс колёс ходовых тележек
и замена их поверхностью трения с соответствующими коэффициентами трения
качения и скольжения.
5. Получен экспериментальный график зависимости изменения скорости
башенного крана КБ-408.21 г/п 10 т от времени в результате наезда на безударные
ТУП, являющийся важным для правильной оценки параметров скоростного
режима крана. Результаты натурного эксперимента показали достаточно
205
неустойчивый
характер
торможения
башенного
крана,
что
говорит
о
существовании больших динамических нагрузок, генерируемые башней с
противовесом и стрелой, оказываемых на м/к башенного крана в процессе наезда
на безударные ТУП, при этом время полного торможения крана в натурном
эксперименте составило 3,3 с, что на 12% оказалось больше значения
полученного в вычислительном эксперименте (2,9 с). Сравнение результатов
вычислительного и натурного экспериментов позволяет судить о их достаточно
хорошей сходимости, а также судить об адекватности поведения РМ башенного
крана КБ-408.21 г/п 10 т его действительной конструкции.
206
Заключение
Настоящая
диссертационная
работа
является
завершённой
научно-
исследовательской работой по проблеме расчетного анализа процесса наезда
грузоподъемных кранов на препятствия. На основе теории МКЭ были
разработаны конечно-элементные расчетные модели динамического нелинейного
процесса взаимодействия грузоподъёмных кранов с тупиковыми упорами. В
качестве метода исследований поведения разработанных моделей выбран
вычислительный эксперимент на основе численного МКЭ, посредством которого
исследованы процессы динамики наезда
кранов на ударные и безударные
тупиковые упоры.
Выполненная диссертационная работа позволяет сделать следующие
основные выводы:
1. Показано, что проблема пространственного поведения грузоподъёмных
кранов в процессе наезда на тупиковые упоры изучена недостаточно, прежде
всего, как по причине чрезмерного упрощения расчётных моделей кранов –
использовались, в основном, расчётные модели с 2-3 степенями свободы,
практически не отражающие работу действительных металлоконструкций
грузоподъёмных кранов, так и по причине упрощения математических моделей –
для вывода уравнений движения крана использовалось в основном уравнение
Лагранжа второго рода 2-го и 3-го порядков.
2. Установлено, что как отечественные, так и зарубежные стандарты
приводят различные методы расчета и определения энергоемкости буферов,
которые не имеют достаточно обоснованных научных и аналитических
подтверждений. Такие расчёты, практически не учитывающие действительную
работу металлоконструкций кранов, а также их переменные эксплуатационные
состояния, приводят к неточной оценке действительных ударных нагрузок
возникающих при наездах кранов на тупиковые упоры.
3. Разработаны конечно-элементные расчётные модели грузоподъёмных
кранов со многими степенями свободы, отражающие поведение действительных
207
металлоконструкций мостового, портального и башенного кранов в процессе их
наезда на ударные и безударные тупиковые упоры.
4. В результате проведённой серии вычислительных экспериментов по
наезду мостового и портального кранов на ударные тупиковые упоры
установлено:
4.1.
Полная картина пространственного напряжённо-деформированного
состояния металлоконструкции двухбалочного мостового крана г/п 15/3т в
процессе его наезда на ударные тупиковые упоры. Результаты вычислительных
экспериментов показали, что наезд мостовых кранов на ударные тупиковые
упоры вносит вклад в накопление остаточных деформаций как главных, так и
концевых балок кранов. Установлено, что наибольшее значение напряжений при
наезде мостовых кранов на тупиковые упоры возникают в местах соединения
главных балок с концевыми. При этом, эксплуатационным состоянием
оказывающим наибольшее влияние на результат напряженного состояния следует
считать скорость с которой кран наезжает на тупиковые упоры. Согласно
результатам вычислительных хэкспериментов увеличение скорости наезда на 20%
приводит к увеличению напряженного состояния в местах соединения главных
балок с концевыми на 39%.
4.2. Исследовано поведение резиновых буферов марки БР в процессе наезда
грузоподъёмных кранов на ударные тупиковые упоры. По результатам
вычислительных экспериментов предложены расчетные зависимости для выбора
резиновых буферов мостовых и портальных кранов. Установлено, что резиновые
буфера
грузоподъёмных
кранов
должны
расчитываться
на
поглощение
кинетической энергии крана движущегося со скоростью в среднем не менее 70%
от номинальной.
4.3. Показано, что использование резиновых амортизаторов тупиковых
упоров, в частности, вместо деревянных, снижает рабочую нагрузку на материал
буфера крана на 40 - 45 %.
208
4.4. На основе выполненных экспериментальных исследований получены
диаграммы σ - для резиновых буферов марки БР, необходимые для расчетов в
сфере конечно-элементного проектирования грузоподъёмных кранов.
4.5.Установлено
влияние
различных
эксплуатационных
состояний
грузоподъёмных кранов на работу резиновых буферов и металлоконструкций
кранов в процессе их наезда на тупиковые упоры.
4.6. Результаты вычислительных экспериментов показали, что даже при
соблюдении всех требований правил безопасности опасных производственных
объектов, на которых используются подъёмные сооружения, кинетическая
энергия кранов воспринимаемая резиновыми буферами в тупиковых участках
рельсового пути превышает, по крайней мере в 2 раза энергоемкость буферов на
мостовых кранах и в 1,3 раза энергоёмкость буферов на портальных кранах, что
на практике приводит к разрушениям буферов, тупиковых упоров и оказывает
неблагоприятное влияние на металлоконструкции как грузоподъёмных кранов,
так и подкрановых несущих конструкций.
5. В результате проведённой серии вычислительных экспериментов по
наезду башенных кранов на безударные тупиковые упоры установлено, что
существующие
тупиковые
упоры
являются
не
достаточно
надежным
противоаварийным средством гашения остаточной скорости башенного крана, а
также, что наезд на них с номинальной и выше скоростью не безопасен;
конструкции безударных тупиковых упоров имеют сечение необеспечивающее их
прочность при наезде на них башенных кранов. В работе предложено сечение
обеспечивающее прочность конструкции безударных тупиковых упоров.
6. Определен динамический коэффициент повышения напряжений при
сравнении напряжённо-деформированных состояний металлоконструкций кранов
полученных по расчетным случаям IIb и IId с напряжённо-деформированными
состояниями полученными в результате динамического анализа наезда кранов на
тупиковые упоры, который в опасных сечениях металлоконструкций мостовых
кранов равен 4, для портальных кранов - 1,4 и башенных кранов – 1,22.
209
7. Результаты экспериментальной проверки показали, что разработанная
методика моделирования процессов наезда грузоподъёмных кранов на тупиковые
упоры в среде МКЭ даёт расхождение с экспериментом в среднем около 9%.
Таким образом, результаты физической верификации позволяют утверждать, что
полученные количественные результаты метода вычислительного эксперимента
на основе МКЭ процесса наезда кранов на тупиковые упоры с достаточной для
инженерной практики точностью отражают физическую действительность.
210
Список литературы
1. Панасенко, Н.Н. Динамика ударного взаимодействия грузоподъемных кранов с
препятствиями / Н.Н. Панасенко, В.В. Рабей// V сессия Научного совета РАН по
механике деформируемого твёрдого тела. – Астрахань: АГТУ, 2011. - С.57-59.
2. РД
10-112-01-04.
Рекомендации
по
экспертному
обследованию
грузоподъемных машин. Общие положения. - М. : ГГТН РФ, 2004. – 74 с.
3. Панасенко, Н.Н. Состояние научно-исследовательских работ по динамике
процесса наезда г/п кранов на тупиковые упоры и препятствия/ Н.Н. Панасенко,
В.В. Рабей // Инновационные технологии в машиностроении. – Орск, 2012. - С.
186-192.
4. Петухов, П.З. Защита кранов от ударов при наезде на упоры: дис. … д-ра техн.
наук: 05.05.04 / Петухов Павел Захарович. – Свердловск, 1950. - 467 с.
5. Петухов, П.З. О расчете гидробуферов /П.З. Петухов // Вопросы теории и
работы ПТМ. - Москва-Свердловск: Машгиз. - 1955. - В. 56.– С. 5-14.
6. Ковальский, Б.С. Расчет крановых буферов с учетом гибкого подвеса груза /
Б.С. Ковальский// Вестник машиностроения. - 1954. - №4. - С. 14-17.
7. Комаров, М.С. Динамика грузоподъемных машин /М.С. Комаров. - М.: Машгиз,
1962. - 268 с.
8. Мартынов, А.В. Исследование гравитационного торможения мостовых кранов
и крановых тележек: дис. … канд. техн. наук: 05.05.04/ Мартынов Анатолий
Валентинович. - Новочеркасск, 1976. – 185 с.
9. Казак, С.А. Динамика мостовых кранов / С.А. Казак. - М.: Машиностроение,
1968. - 331 с.
10. Черкасов, В.Г. Исследование пружинно-гидравлических буферов кранов и
мостовых перегружателей: дис. … канд. техн. наук: 05.05.04/ Черкасов Валентин
Григорьевич. - Новочеркасск, 1971.- 155 с.
11. Дейнега, В.И. Защита мостовых кранов от ударов при наездах на тупиковые
упоры: дис. … канд. техн. наук: 05.05.05/ Дейнега Владимир Иванович. Новочеркасск, 1987. - 149 с.
211
12. Джигкаев, Т.С. Основы динамики мостовых перегружателей, кранов и их
защита от ударов при наезде тележек на упоры: дис. … д-ра техн. наук: 05.05.04 /
Джигкаев Тамерлан Сосланович. - Новочеркасск, 2001.-330 с.
13. Поликарпов,
К.В.
Расчет
динамических
нагрузок,
действующих
на
металлоконструкции мостовых кранов с жестким подвесом груза: дис. канд. техн.
наук: 01.02.06 / Поликарпов Кирилл Владимирович.- М., 2003.-170 с.
14. Жуков, В.Г. Повышение безопасности эксплуатации башенных кранов на
рельсовом ходу: дис. … канд. техн. наук: 05.05.04 / Жуков Валентин Георгиевич.
– Новочеркасск, 2004. - 174 с.
15. Лобов, Н.А. Разработка основ динамики передвижения кранов по рельсовому
пути и методов повышения ресурса работы крановой системы: дис. д-ра техн.
наук: 05.05.04/ Лобов Николай Александрович. – М., 2005. – 294 с.
16. Haas, T.N. Numerical (FEA) Evaluation of Crane End Buffer Impact Forces: dis.
Ph.D. /Haas Trevor Neville. - South Africa., 2007. - 243 p.
17. Петухов, П.З. Буферные устройства / П.З. Петухов. - Москва-Свердловск:
Машгиз, 1949. - 108с.
18. Петухов, П.З. К вопросу об ускорении тележек и мостовых кранов / П.З.
Петухов // Вопросы теории и работы ПТМ. – Свердловск. - 1961.- В. 104. - С. 5-14.
19. Справочник по кранам: в 2т. / Под общ. ред. А.И. Дукельского. - Л.:
Машиностроение. - Т.2. - 1973. - 472 с.
20. Справочник по кранам: в 2т. / Под общ. ред. М.М. Гохберга. – М.:
Машиностроение. - Т.2 . - 1988. - 559 с.
21. Буланов, В.Б. Гашение колебаний козлового крана с помощью гасителей с
сухим трением / В.Б. Буланов // Вестник машиностроения. – 1977. - №5.- С. 43-45.
22. Грузоподъемные краны промышленных предприятий: справочник / И.И.
Абрамович, В.Н. Березин, А.Г. Яуре – М.: Машиностроение, 1989. – 360 с.
23. Александров, М.П. Подъемно-транспортные машины: учебник для вузов /
М.П. Александров. - 4-е изд. - М.: Высшая школа, 1972 – 504 с.
24. Грузоподъемные машины: учебное пособие для машиностроит. вузов/ Л.Г.
Кифер, И.И. Абрамович– М.: Машгиз. - Ч.2. - 1959.-604 с.
212
25. Буланов, В.Б. Устройства для гашения колебаний грузоподъемных кранов /
В.Б.
Буланов,
Д.Н.
Спицина,
И.И.
Абрамович//
Подъемно-транспортное
оборудование. – 1975. - №16. – 26 с.
26. Буланов, В.Б. Теоретические исследования работы динамического гасителя
колебаний для мостовых кранов/ В.Б. Буланов, Д.Н. Спицина// Изв. высш. учеб.
заведений. Сер. «Машиностроение». – 1973. - №5. - С. 95-100.
27. Григорьев, Н.Н. Нагрузки кранов / Н.Н. Григорьев. - Л.: Машиностроение,
1964. - 168 с.
28. Ковальский, Б.С. Грузоподъемные машины. Передвижение кранов/ Б.С.
Ковальский. - Харьков: ХВКНУ, 1963. - 216с.
29. Спицына, Д.Н. Гашение колебаний металлоконструкций козловых кранов/
Д.Н. Спицына, В.Б. Буланов// Вестник машиностроения. – 1976.- №7. - С.47-49.
30. Ксюнин, Г.П. О нелинейности механических характеристик буферов/ Г.П.
Ксюнин, В.Н. Толочек// Динамика и надежность погрузочных и грузоподъемных
машин. Труды Новочеркасского политехнического института.- 1982. - С.102-105.
31. Спицына, Д.Н. Методика определения параметров виброгасителей для
козловых кранов/ Д.Н. Спицына, В.Б. Буланов // Вестник машиностроения.- 1977.
- №6. - С. 17-19.
32. Цехнович, Л.И. Пружинно-гидравлическое демпферное устройство для
электромагнитных металлургических кранов/ Л.И. Цехнович, В.И. Сарандачев,
И.С. Литвинова// Металлургическая и горнорудная промышленность. – 1972.-№2.
- С.62-65.
33. Кононов, В.Е. Резиновые и полиуретановые амортизаторы как средство
повышения работоспособности вибронагруженных деталей экипажной части
локомотивов: монография/ В.Е. Кононов. - М.: РГОТУПС, 2007. – 187 с.
34. Расчет и конструирование резинометаллических буферов: тематический
обзор/ В.Г. Масленников, Ю.В. Глухов, А.А. Ткаченко. - Центральный научноисследовательский институт информации и технико-экономических исследований
нефтеперерабатывающей и нефтехимической промышленности, 1987. - 30 с.
213
35. СНиП 2.01.07-85. Нагрузки и воздействия. – М.: ЦИТП Госстроя СССР, 1987.
– 36 с.
36. ОСТ
24.191.37-78.
Краны
мостовые
электрические
крюковые
грузоподъемностью 3,2-50 т. Буфера резиновые. Конструкция и размеры.- М.:
Минтяжмаш, 1978. - 8 с.
37. DIN 15018-2. Cranes. Steel Structures. Principles of Design and Construction. German National Standard. – Berlin: Deutsches Institut Fur Normung E.V., 1984. – 9
p.
38. AS 1418.18 - 2001. Cranes, Hoists and Winches. Part 18: Crane Runways and
Monorails. Appendix B. – Sydney: Standards Australia International Ltd, 2001. - P.
40 - 41.
39. EN 1991-3. Eurocode 1 – Actions On Structures. Part 3: Actions Induced By Cranes
and Machinery. – Brussels: European Committee for Standardization, 2003. – P. 1 – 44.
40. ГОСТ 1451-77. Краны грузоподъемные. Нагрузка ветровая. Нормы и метод
определения.- М.: ИПК издательство стандартов, 1977. - 16с.
41. Demag Cranes. URL: http://www.demag.com (дата обращения: 01.06.2014).
42. SABS 0160-1989. Code of Practice for The General Procedure And Loadings To
Be Applied In The Design Of Buildings. - Pretoria: South African Bureau of Standards,
1989. - P. 95-100.
43. AS 1418.1–1994. Cranes (Including Hoists And Winches). Part 1: General
Requirements. - 3rd Edition. - Sydney: Standards Australia International Ltd, 1994. – P.
24 - 26.
44. AISE Technical Report 6, October 2000. Specification for Electric Overhead
Travelling Cranes for Steel Mill Service. - P. 48-49.
45. Kohlhaas, S. Impact Forces on End Stops for Overhead Travelling Crane Support
Structures: Research Report / S. Kohlhaas. - Stellenbosch: University of Stellenbosch,
2004.
46. Липатов, А.С. Методы повышения безопасности грузоподъемных кранов при
ненормируемых условиях эксплуатации: дис. … д-ра техн. наук: 05.05.04 /
Липатов Анатолий Степанович. - Новочеркасск, 2005. - 259 с.
214
47. Лобов, Н.А. Динамика передвижения кранов по рельсовому пути: учебное
пособие/ Н.А. Лобов .- М: МГТУ им. Н. Э. Баумана, 2003. – 232 с.
48. РД 22-166-86. Краны башенные строительные. Нормы расчёта. - М.: СКТБ
«Стройдормаш», 1987. – 61 с.
49. Анализ аварий и несчастных случаев на подъемных сооружениях: учебное
пособие/Под редакцией В.С. Котельникова, В.Ф. Мартынюка. - М: ООО «Анализ
опасностей», 2008. - 356 с.
50. Conductix-Wampfler.
URL:
http://www.conductix.com
(дата
обращения:
01.06.2014).
51. ТУ 2500-376-00152106-94. Изделия резиновые технические. – М.: ОАО
«НИИРП», 1994.
52. Юзиков, В.П. Строительная механика тонкостенных стержней: монография /
В.П. Юзиков; под ред. Н.Н. Панасенко. - Волгоград: Волгоградское научное
издательство, 2013. - 361 с.
53. Панасенко, Н.Н. Конечно-элементная модель демпфирования колебаний
несущих металлоконструкций грузоподъемных кранов/ Н.Н. Панасенко, В.В.
Рабей, Л.С. Синельщикова.- Вестник АГТУ. - Астрахань: Изд-во АГТУ, 2013. –
Т.56.- №2. - С.41-49.
54. Panasenko, N.N. The Calculated Justification of Seismic Stability of Load-Lifting
Cranes / N.N. Panasenko, A.V. Sinelshchikov, V.V. Rabey // WSEAS Transactions on
Applied and Theoretical Mechanics. - 2014. - V.9. - P. 104-123.
55. Korobeinikov, S.N. Application of a finite element method for the solution of three
dimensional contact problems/ S.N. Korobeinikov, V.V. Alyokhin, M.I. Bondarenko //
Advances in Simulation and Interaction Techniques: Proc. of the 2nd Intern. Conf. on
Computational Structures Technology/M. Papadrakakis, B.H. V. Topping (Eds). Edinburgh: Civil-Comp Press, 1994. - P. 165-175.
56. Hallquist, J. O.. LS-DYNA Theoretical Manual / J. O. Hallquist..- Livermore
Software Technology Corporation, 2005. - Р. 34.11-34.13.
57. Коробейников, С.Н. Нелинейное
деформирование твердых тел/
Коробейников. – Новосибирск: Изд. СО РАН, 2000. – 262 с.
С.Н.
215
58. Жеков, К.С. Современные аналитические возможности Ansys / К.С. Жеков //
САПР и графика, 1998. - №9.- С.50-54; №10.- С.50-52.
59. Басов, К.А. ANSYS: справочник пользователя / К.А. Басов. - М.: ДМК Пресс,
2005. - 640 с.
60. Карпиловский, В.С. Вычислительный комплекс SCAD/ В.С. Карпиловский,
Э.З. Криксунов, А.А. Маляренко, А.В. Перельмутер, М.А. Перельмутер. – М.:
Издательство АСВ, 2004. - 592 с.
61. Шимкович, Д.Г. Расчет конструкций в MSC /NASTRAN for Windows/ Д.Г.
Шимкович. – M.: ДМК Пресс, 2001. - 448 с.
62. Городецкий, А.С. Повышение качества расчетов строительных конструкций
на основе совместного использования программных комплексов STARK ES и
ЛИРА / А.С. Городецкий, Ю.П. Назаров, Ю.Н. Жук // Информационный вестник
ГУ МО Мособлгосэкспертизы, 2005. – Т.8. - №1. – С. 42-49
63. Перельмутер, А.В. Расчетные модели сооружений и возможность их анализа/
А.В. Перельмутер, В.И. Сливкер. – М.: ДМК Пресс, 2007. – 600с.
64. Розин, Л.А. Стержневые системы как системы конечных элементов/ Л.А.
Розин. – Л.: Издательство Ленинградского ун-та, 1975. – 237 с.
65. Карпиловский, В.С. Использование и конструирование некоторых типов
конечных элементов для задач строительной механики: автореф. дисс. … канд.
техн. наук: / Карпиловский Виктор Семенович. - К.: КАДИ, 1982. – 20 с.
66. Гольденблат И.И. Физические и расчетные модели сооружений / И.И.
Гольденблат, В.Л.
Бажанов // Строительная механика и расчет сооружений,
1970.- №2. – С. 23 – 27.
67. Гольденблат, И.И. Модели сейсмостойкости сооружений / И.И. Гольденблат,
Н.А. Николаенко, С.В. Поляков, С.В. Ульянов. – М.: Наука, 1979. – 252 с.
68. Гольденблат, И.И. Проблемы «инженерного риска» в теории сейсмостойкости
/ И.И. Гольденблат, С.В. Поляков // Строительная механика и расчет сооружений,
1975 - №6. - С. 41-44.
69. Городецкий, А.С.. Компьютерные модели конструкций/ А.С. Городецкий, И.Д.
Евзеров. – К.: Факт, 2005. – 344 с.
216
70. Панасенко, Н.Н. Динамика и сейсмостойкость подъемно-транспортного
оборудования атомных станций: дис. … д-ра техн. наук: 05.05.04 / Панасенко
Николай Никитович. – В 2-х частях. Часть 1. - Новочеркасск: ЮрГТУ (НПИ),
1992. – 475 с.
71. Орлов, А.Н. Обобщенная математическая модель стреловых кранов/ А.Н.
Орлов, Ф. Флюгель //Труды С. Петербургского гос. техн. ун-та. – СПб., 1995. №455. – С. 66-77.
72. Бортяков, Д.Е. Специальные грузоподъемные машины. Портальные, судовые
и плавучие краны: учеб. пособие / Д.Е. Бортяков, А.Н. Орлов; под ред. проф. К.Д.
Никитина. – СПб.: Изд-во политехн. ун-та, 2009. – 160 с.
73. Флюгель, Ф. Методика построения обобщенных математических моделей
грузоподъемных кранов с грузом на пространственном канатном подвесе:
автореф. дис. … канд. техн. наук: 05.05.04 / Флюгель Франк - Санкт-Петербург:
Санкт-Петербургский государственный технический университет, 2002. - 18 с.
74. Орлов, А.Н. Общая динамическая модель грузоподъемных кранов / А.Н.
Орлов// Оптимизация параметров строительных и дорожных машин.- Ярославль,
1992. - С. 13-20.
75. Портальные краны /А.Н. Орлов, М.Н. Хальфин, Б.Ф. Иванов и др.: под ред.
М.Н. Хальфина. – Ростов-на-Дону, 2001. – 309 с.
76. Орлов, А.Н. Обобщенная математическая модель мостовых кранов / А.Н.
Орлов, Ф. Флюгель // В сб. «Динамика, прочность и надежность технологических
машин». – Труды С.–Петербург. гос. техн. ун-та. – СПб., 1998. - № 478. – С. 3-8.
77. Бортяков,
портальных
Д.Е.
кранов/
Математическая
Д.Е.
Бортяков,
модель
А.Н.
системы
Орлов
//
изменения
Изв.
вылета
вузов.
Сер.
Машиностроение, 1990. - № 5. - С. 86-91.
78. Манжула, К.П. Теория
и методы расчета сопротивления усталости
металлических конструкций грузоподъёмных машин: дис. … д-ра. техн. наук:
05.05.05 / Манжула Константин Павлович. – СПб.: СПбГТУ, 1997. – 356 с.
79. Соколов, С.А. Металлические конструкции подъемно-транспортных машин:
учеб. пособие / С.А. Соколов. – СПб.: Политехника, 2005. – 423 с.
217
80. ГОСТ 28609-90. Краны грузоподъемные. Основные положения расчета. – М.:
Изд-во стандартов, 1990. – 6 с.
81. СТО 24.09-5821-01-93. Краны грузоподъемные промышленного назначения.
Нормы и методы расчета элементов конструкций. – М.: ВНИИПТМАШ, 1993. –
136 с.
82. Пособие по расчету элементов стальных конструкций (к СТО 24.09-5821-0193). – М.: ВНИИПТМАШ, 1993. – 119 с.
83. Зенкевич, О. Метод конечных элементов в технике: пер. с англ / О. Зенкевич. М.: Мир, 1975.
84. Агапов, В.П. МКЭ в статике, динамике и устойчивости конструкций/ В.П.
Агапов – М.: Изд-во АСВ, 2004. – 248 с.
85. Синицын, А.П. Метод конечных элементов в динамике сооружений/ А.П.
Синицын. - М.: Стройиздат, 1978.- 231 с.
86. Бате, К. Численные методы анализа и метод конечных элементов / К. Бате, Е.
Вильсон.- М.: Стройиздат, 1982.- 448 с.
87. Clough, R. Dynamics of Structures / R. Clough, J. Penzien. - 2nd ed. - McGrawHill, 1993. – 768 р.
88. Справочник по кранам: в 2т. / Под общ. ред. М.М. Гохберга. – М.:
Машиностроение. - Т.1 . - 1988. - 536 с.
89. СТО АПРСТ 032.03.02.2008. Технические осмотры и дефектация механизмов
портальных кранов. Методические рекомендации по проведению, 2008.
90. РД
10-112-02-2009.
Методические
рекомендации
по
экспертному
обследованию грузоподъемных машин. Часть 2. Краны стреловые общего
назначения и краны манипуляторы.- М.: ООО «НИИКраностроения», 2009.- 35с.
91. ГОСТ 3077-80. Канат двойной свивки типа ЛК-О конструкции 6’19(1+9+9)+1
о.с. Сортамент.- М.: Изд-во стандартов, 1980. – 5 с.
92. Назаров, Д.А. Обзор современных программ конечно-элементного анализа/
Д.А. Назаров //САПР и графика, 2000. - №2. – С. 52-55.
93. Рабей,
В.В.
Исследование
напряженно-деформированного
состояния
металлоконструкций мостовых кранов в процессе их наезда на тупиковые упоры/
218
В.В. Рабей // Известия высших учебных заведений. Северо-Кавказский регион.
Технические науки. - 2013.- Т.173. - №4. - C. 42-46.
94. ТУ 24-05-03. Регламент выполнения капитального, полно - комплектного и
капитально - восстановительного ремонтов металлоконструкций (с заменой
отдельных элементов) мостовых кранов. М.: ВНИИПТМАШ, 2003. – 27 с.
95. Rabey, V.V. The Study of a Stress-Strain State of Bridge Cranes’ Metal
Constructions in the Process of a Collision with the End Stops /V.V. Rabey // FME
Transactions. - 2013. - V.41. - №3. – P.195-201.
96. Рабей, В.В. Расчет резиновых буферов мостовых кранов грузоподъемностью
до 50 т./ В.В. Рабей // Безопасность труда в промышленности. - 2013. - №8. - С.
45-50.
97. Расчёты крановых механизмов и их деталей. В 2-х томах. Т.1.-Издание 4-е. –
М.: ВНИИПТМАШ, 1993. – 187 с.
98. ПБ
10-382-00.
Правила
устройства
и
безопасной
эксплуатации
грузоподъемных кранов . - Госгортехнадзор России.- М.: НПО ОБТ, 2000. - 266с.
99. Рабей,
В.В.
Анализ
проблемы
взаимодействия
башенных
кранов
с
безударными тупиковыми упорами/ В.В. Рабей //Ударно-вибрационные системы,
машины и технологии: материалы V международного научного симпозиума.Орел: Госуниверситет-УНПК, 2013 - С. 279-283.
100. Rabey, V.V. A Study of Run onto the Wheel Contact Crane Stops of Tower Cranes
/ V.V. Rabey // International Journal of Mechanics. - 2013. - V.7. - №4. - P. 379-384.
101. Мяченков, В.И. Расчеты машиностроительных конструкций методом
конечных элементов/ В.И. Мяченков, В.П. Мальцев, В.П. Майборода. – М.:
Машиностроение, 1989. – 520 с.
102. ANSYS 12.1 Theory Reference Manual. Structures with Material Nonlinearities,
4.7. Hyperelastcity, 2009.
103. Горбулинский,
А.
А.
Экспериментально-аналитическое
определение
характеристик эластомеров для моделирования процессов деформирования
тонкого листа эластичным рабочим инструментом [Электронный ресурс] / А. А.
Горбулинский//
Труды
Всероссийской
научно-технической
конференции
219
«Студенческая весна 2013: Машиностроительные технологии».– М.: МГТУ им.
Н.Э
Баумана.
–
2013.
-
№
гос.
регистрации
0321300796.
–
http://studvesna.qform3d.ru?go=articles&id=796 (дата обращения: 01.06.2014).
URL:
220
ПРИЛОЖЕНИЯ
221
Приложение 1. Акты внедрения результатов исследования.
222
223
224
225
226
227
228
229
Приложение 2. Удостоверение специалиста по обследованию кранов I уровня.
230