Автоматика и регулирование-Гимадиев АГ
advertisement

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ АЭРОКОСМИЧЕСКИЙ
УНИВЕРСИТЕТ ИМЕНИ АКАДЕМИКА С.П. КОРОЛЕВА
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)»
А. Г. Гимадиев
Автоматика и регулирование
двигательных установок ракетных
и космических систем
Электронное учебное пособие
Самара
2010
УДК 621.452(075)
ББК 39.65
Автор: Гимадиев Асгат Гатьятович
Рецензенты: д-р. техн. наук, проф. В.Н. Матвеев,
д-р. техн. наук, проф. В.В. Бирюк
Приведены пневмогидравлические схемы жидкостных ракетных
двигательных установок ракетных и космических систем и описаны
принципы их действия. Изложены требования к качеству переходных
процессов в системах регулирования двигателей. Даны сведения по
системе наддува, управления и регулирования, а также изложен вывод
уравнений математической модели входящих в их состав агрегатов. Дана
методика выбора параметров агрегатов, при которых обеспечивается
устойчивость систем и показатели качества регулирования. Особое
внимание уделено низкочастотной динамической модели двигателя, дан
вывод уравнений камеры сгорания, форсуночной головки, газовода,
ротора турбонасосного агрегата. Рассмотрен механизм потери
продольной устойчивости ракеты и мероприятия по ее обеспечению.
Описаны системы топливопитания и регулирования двигательных
установок космических аппаратов.
Учебное пособие рекомендуется для магистрантов по курсу
лекций «Автоматика и регулирование двигательных установок ракетных
и космических систем» в рамках магистерской программы «Энергетика,
экология и двигательные установки ракетных и космических систем»
по направлению 160700.68 «Двигатели летательных аппаратов», а также
для студентов специальности 160302 «Ракетные двигатели» и может
быть полезно при выполнении курсовых работ, дипломных проектов и
подготовке к экзаменам.
Подготовлено на кафедре автоматических систем энергетических
установок.
© Самарский государственный
аэрокосмический университет, 2010
2
ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
K - коэффициент передачи
L - акустическая индуктивность
m& - массовый расход
М - масса
N - сила
M (ω ) - амплитудно-частотная характеристика
P - давление, тяга двигателя
R - гидравлическое сопротивление
F - площадь
T - постоянная времени
W ( jω ) - амплитудно-фазовая частотная характеристика
W ( s ) - передаточная функция
x - координата поршня дифференциального клапана
Δ - приращение
d - диаметр
l - длина
β - половина угла при вершине треугольного окна дифклапана
γ - жесткость, угол тангажа
h - высота треугольного окна дифференциального клапана
s - переменная в интегральном преобразовании Лапласа
t - время
v - скорость потока жидкости
ζ - коэффициент демпфирования
ν - кинематическая вязкость
μ - коэффициент расхода
λ - коэффициент сопротивления трения
ρ - плотность рабочей среды
ϕ - угол поворота привода дроссельного крана
ω - угловая частота колебаний
3
j = −1 - мнимая единица
ИНДЕКСЫ
А - принадлежность к полости А
Б - принадлежность к полости Б
В - принадлежность к полости В
НАР – начало автоматической работы
вх - вход
вых - выход
гд - гидродинамическая
дв - двигатель
др - дроссельный кран
дф - дифференциальный клапан
ж - жиклер
нб - наибольший
нм - наименьший
п - поршень
пр - приведенный, предварительный
прж - пружина
расч - расчетный
р - регулятор
тр - трение
0 – соответствует номинальному значению параметра
min - минимальный
max - максимальный
ОСНОВНЫЕ СОКРАЩЕНИЯ
ЖГГ – жидкостный газогенератор
ЖРДУ – жидкостная ракетная двигательная установка
ЖРДМТ - жидкостный ракетный двигатель малой тяги
ДУ – двигательная установка
КС – камера сгорания
ЛА - летательный аппарат
МЖРД – микро ЖРД
4
РКС – регулирование кажущейся скорости
САР - система автоматического регулирования
СОБ – синхронное опорожнение бака
ТНА – турбонасосный агрегат
ЭПК - электропневмоклапан
ОГЛАВЛЕНИЕ
Стр.
Введение
1 ПНЕВМОГИДРАВЛИЧЕСКИЕ СХЕМЫ ДВИГАТЕЛЬНЫХ
УСТАНОВОК РАКЕТНЫХ И КОСМИЧЕСКИХ СИСТЕМ
1.1 Система управления ракеты-носителя
1.2 Понятие о системах автоматического управления
двигательных установок
1.3 ЖРД с вытеснительной системой подачи топлива и
газовым аккумулятором давления
1.4 Пневмогидравлические схемы ЖРДУ без
дожигания компонентов
1.5 Пневмогидравлические схемы ЖРДУ с дожиганием
компонентов
1.6 Требования к качеству переходных процессов в
системе регулирования ЖРД
1.7 Ограничения, накладываемые на частотные
характеристики САР двигателей
1.8 Пневмогидравлические схемы двигательных
установок космических аппаратов
2
СИСТЕМЫ НАДДУВА БАКОВ И ПОДАЧИ
КОМПОНЕНТОВ ТОПЛИВА ЖРДУ
2.1 Расчет давления наддува топливных баков
2.2 Принципы построения математических моделей
автономных агрегатов
2.3 Схемы и принцип действия газовых регуляторов
давления
2.4 Выбор схемы регулятора давления газа с учетом его
конструктивных и технологических особенностей
2.5 Выбор параметров и расчет статических
характеристик регулятора давления газа
2.6 Расчет динамических характеристик регулятора и
оценка устойчивости САР давления газа
3 СИСТЕМЫ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ ЖРД
3.1 Состав систем управления и регулирования
двигателя
3.2 Пневматические и гидравлические клапаны ЖРД
7
10
10
16
19
23
25
28
36
39
46
46
49
53
57
64
74
83
83
88
5
3.3 Схемы и принцип действия регуляторов тяги ЖРД
3.4 Выбор параметров и расчет статических
характеристик регулятора тяги
3.5 Расчет динамических характеристик регулятора
тяги
3.6 Оценка устойчивости системы «ЖРД-регулятор
тяги» и выбор параметров регулятора
3.7 Регулирование соотношения компонентов ЖРДУ
3.8 Дроссель системы синхронного опорожнения баков
4 НИЗКОЧАСТОТНАЯ МОДЕЛЬ ЖРД ЗАМКНУТОЙ
СХЕМЫ
4.1. Задачи исследования динамических процессов в
ЖРДУ методами математического моделирования
4.2 Математическая модель камеры сгорания ЖРД
4.3 Математическая модель форсуночной головки и
рубашки охлаждения
4.4 Математическая модель газовода и магистрали
горючего
4.5 Уравнение ротора ТНА
4.6 Уравнения центробежных насосов ТНА
4.7 Низкочастотная и высокочастотная неустойчивости
камеры сгорания ЖРД
5 ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ РАКЕТЫ
С ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ
5.1 Механизм потери продольной устойчивости ракеты
5.2 Трубопроводы топливных магистралей и их
динамические модели
5.3 Гидравлический демпфер для обеспечения
устойчивости ракеты
6 СИСТЕМЫ ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ
ДВИГАТЕЛЬНЫХ УСТАНОВОК КОСМИЧЕСКИХ
АППАРАТОВ
6.1 Газобаллонные реактивные двигатели ориентации
космических аппаратов
6.2 Однокомпонентные ЖРД малой тяги
6.3 Двухкомпонентные ЖРД малой тяги
6.4 Комплексная двигательная установка космических
аппаратов
6.5 Коррекция динамических характеристик ЖРД малой
тяги
Список литературы
92
104
118
129
138
140
146
146
147
153
156
159
161
163
170
170
174
178
179
179
186
187
189
193
197
6
Введение
Ракетные двигательные установки резко отличаются от других
тепловых двигателей высокой энергонапряженностью процессов во всех
основных агрегатах. Высокая энергонапряженность ЖРД и его агрегатов
существенно сказывается на протекаюших в них динамических процессах,
которые можно разделить на два класса [11]:
- переходные процессы, характеризующиеся изменением во времени
параметров
двигателя
и
возникающие
при
изменении
положения
управляющих органов;
- колебательные процессы, появляющиеся под воздействием автоколебаний в
каком-то контуре или при гармоническом воздействии с постоянной
частотой.
К переходным процессам относятся запуск ЖРД, переход его с режима
на
режим,
останов,
а
также
процессы,
возникающие
при
несанкционированных изменениях характеристик отдельных агрегатов,
связанных с нарушением их нормальной работы.
Для
решения
динамические
и
задач
регулирования
статические
важное
характеристики
значение
ЖРД.
имеют
Статические
характеристики определяют связи его основных параметров с внешними и
внутренними
определяемыми
управляющими
и
возмущающими
положением
органов
управления
воздействиями,
(например,
углами
поворота дросселей), изменением давления компонентов топлива на входах в
насосы,
температуры,
плотности
и
фазового
состава
компонентов,
отклонением характеристик агрегатов (КПД и напорньих характеристик
насосов, КПД и расходных характеристик турбин, сопротивлений элементов
гидравлического тракта и т. д.) от среднестатистических.
7
Если выбор параметров систем и расчет статических характеристик
агрегатов и ЖРД в целом достаточно отработан и подробно изложен в
литературе, то при создании ЖРД часто возникают проблемы с обеспечением
устойчивости
пневмогидравлических
систем
и
показателей
качества
регулирования.
В САР входят объект регулирования (ЖРД) и управляющие устройства
(регуляторы, клапаны, дроссели и т. д.). При выборе оптимального варианта
САР и анализе ее особенностей возникает необходимость оценки точности
(статической и динамической) регулирования, анализа устойчивости этого
процесса, определения качества переходных процессов и т. д. для решения
перечисленных задач необходимо знать динамические характеристики обеих
частей САР. Введение в схему ЖРД автоматических регуляторов, как
правило, приводит к изменению, часто существенному, как статических, так
и динамических характеристик двигателя, например, к появлению резонансов
на его частотных характеристиках, а иногда и к потере устойчивости САР.
Этот неприятный факт объясняется тем, что данный регулятор не подходит к
данному ЖРД и для обеспечения устойчивости САР или улучшения
динамических характеристик двигателя с регулятором необходимо изменить
динамические характеристики регулятора. В принципе можно изменить
динамические характеристики двигателя, однако это существенно сложнее, а
иногда просто невозможно.
Для обеспечения достаточного запаса устойчивости САР необходимо
провести анализ устойчивости системы двигатель-регулятор, используя
динамические частотные характеристики ЖРД и математическую модель
регулятора. Динамические частотные характеристики ЖРД используются
также при разработке систем управления летательных аппаратов, для
которых ЖРД является исполнительным органом.
При анализе реактивных систем управления космическими аппаратами,
состоящих
из
ряда
ЖРДМТ,
необходимы
другие
динамические
характеристики, определяющие вид переходных процессов, а следовательно,
8
величину
и
длительность
управляющего
импульса,
а
также
их
эффективность.
Динамические
определения
характеристики
продольной
ЖРД
устойчивости
необходимо
знать
ракеты
полете.
в
и
для
При
неблагоприятном сочетании динамических характеристик элементов системы
корпус ракеты топливоподающие магистрали от баков до ЖРД возможна
потеря
устойчивости,
сопровождающаяся
продольными
колебаниями
корпуса, колебаниями давления компонентов топлива на входе в двигатель и
давления в камере сгорания. Эти колебания могут привести к разрушению
ракеты. Так как ЖРД является одним из элементов колебательного контура,
то его динамические характеристики во многом определяют устойчивость
всего контура.
Из-за высокой энергонапряженности характерные постоянные времени
отдельных агрегатов ЖРД малы - порядка сотых или тысячных долей
секунды и только в отдельных случаях они составляют десятые доли
секунды. Схемы современных ЖРД отличаются большой сложностью, при
этом все агрегаты связаны между собой. Так как постоянные времени
отдельных агрегатов имеют близкий порядок и в то же время агрегаты
связаны друг с другом, то ЖРД имеет, как правило, широкую полосу
пропускания частот. Поэтому при анализе особенностей динамических
характеристик ЖРД, особенно ЖРД с дожиганием, трудно бывает выделить
какое-то основное, определяющее звено (или контур), формирующее в
основном
его
динамические
характеристики.
Вследствие
этого
при
формировании математической модели ЖРД приходится использовать и
решать уравнения всех элементов и редко удается чем-то пренебречь.
В учебном пособии на основе литературных источников и личного
опыта автора по испытаниям и доводке ЖРД изложен материал по ПГС
двигательных установок, по требованиям к качеству переходных процессов в
САР, дан вывод уравнений агрегатов и методика выбора их параметров, при
9
которых обеспечивается устойчивость систем и показатели качества
регулирования.
1 ПНЕВМОГИДРАВЛИЧЕСКИЕ СХЕМЫ ДВИГАТЕЛЬНЫХ
УСТАНОВОК РАКЕТНЫХ И КОСМИЧЕСКИХ СИСТЕМ
1.1 Система управления ракеты-носителя
В системе управления ракеты-носителя
жидкостный ракетный
двигатель (ЖРД) является исполнительным элементом. Управление ракетой
может
осуществляться
поворотом
двигателей
по
двум
осям
или
рассогласованием тяг в многокамерной двигательной установке. Во втором
случае необходимо изменять тяги двигателей по сигналам системы
управления ракеты [9, 14, 19, 35, 37, 39](рис. 1.1).
vP
PK 2
α , γ ,θ
PK 3
PK 4
vP
α , γ ,θ
PK 1
ϕ1
m& P1
PK 1
PВХ 1 , PВЫХ 1
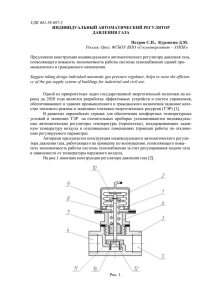
Рис. 1.1.1 - Функциональная схема системы управления ракеты с рассогласованием тяг
двигателей: vP – скорость полета ракеты; α , γ ,θ – угол крена, тангажа и рыскания
ракеты; PВХ 1 , PВЫХ 1 – давления на входе в регулятор и на его выходе; ПСРУ – программное
счетно-решающее устройство; ЭПР – электропривод дроссельного крана регулятора тяги
(давления в камере сгорания); PK 1 , PK 2 , PK 3 , PK 4 – давления в камерах сгорания четырех
двигателей; m& P1 – расход горючего в окислительный, двухкомпонентный газогенератор
первого двигателя; ϕ 1 – угол поворота привода дроссельного крана регулятора; 1 –
ракета-носитель; 2 – датчик положения ракеты в пространстве; 3 – датчик скорости полета
ракеты
10
Изменение
тяги
двигателей
осуществляется
подсистемами
регулирования тяги, исполнительным элементом которых является регулятор
расхода топлива.
Управление ракетой осуществляется по углам крена, тангажа и
рыскания, а также кажущейся скоростью полета. По угловым датчикам
определяется фактическое положение ракеты в околоземном пространстве и
эти команды поступают в программное счетно-решающее устройство
(ПСРУ), в котором они сравниваются с требуемыми по программе
значениями углов
α , γ ,θ . По разнице программных и фактических значений
этих углов формируется команда на изменение тяги двигателей. Усиленный
сигнал с ПСРУ на изменение тяги двигателя поступает к электроприводу
дросселя регулятора расхода топлива. Перенастройка площади дроссельного
крана регулятора приводит к изменению расхода подмешиваемого в
газогенератор компонента топлива, что приводит к изменению температуры
газа на выходе из газогенератора, к изменению мощности турбины, частоты
вращения ротора ТНА и, как следствие, к изменению расхода основных
компонентов в камеру сгорания и тяги двигателя.
Так как ракета как объект управления является более инерционной, по
сравнению с двигателями, то сигналы о тягах двигателей (давлениях Pк в
камерах сгорания) поступают в ПСРУ для упреждающего изменения углов
α , γ ,θ сверх допустимой нормы. Таким образом, по сигналу с ПСРУ
двигатель настраивается на определенную тягу и эта операция выполняется в
результате изменения настройки дроссельного крана регулятора тяги или
расхода топлива в газогенератор.
Для обеспечения требуемой скорости полета ракеты в заданной точке
космического
пространства
также
необходимо
изменять
(помимо
направления полета) тягу двигателей. Эта задача выполняется тем же
регулятором расхода топлива.
11
Движение ракеты на активном участке траектории определяется
равнодействующей трех сил: тяги двигателей P, сил аэродинамического
сопротивления X и силы тяжести G = mg . Для осуществления различных
маневров на траектории, например программных разворотов, компенсации
возможных отклонений от расчетной траектории, необходимо изменять
равнодействующую этих сил. Поскольку применение аэродинамических сил
хотя и возможно, путем поворота воздушных рулей, но малоэффективно, а
изменение силы тяжести невозможно, то управлять полетом ракеты можно
только изменяя величину и направление тяги двигателей.
Таким образом, двигатель является исполнительным органом системы
управления ракетой, которая состоит из системы наведения, системы угловой
стабилизации и системы синхронного опорожнения баков (СОБ).
Система наведения управляет движением центра массы ракеты на
активном участке траектории, т.е. управляет тремя составляющими скорости:
продольной, боковой и нормальной. Соответственно система наведения
состоит из трех каналов: канал регулирования кажущейся продольной
скорости (система РКС), каналы боковой и нормальной стабилизации.
Датчиками системы наведения служат акселерометры, установленные на
гидростабилизированной платформе ракеты.
Акселерометр измеряет кажущееся ускорение, т.е. ускорение ракеты,
находящейся в поле сил тяготения, а после интегрирования ускорения
определяется кажущаяся скорость, которая сравнивается с программным
значением.
Целью системы РКС является получение в конце активного участка
траектории заданного значения продольной кажущейся скорости. Это
достигается изменением скорости согласно программы полета, тем самым
обеспечивается точность выполнения баллистической задачи вывода на
заданную орбиту или попадания в цель.
12
Рис. 1.1.2 - Структурная схема системы РКС
Вводиться дополнительная внутренняя обратная связь по давлению в
камере сгорания для улучшения динамических свойств системы РКС в
режиме стабилизации.
Основные возмущения, действующие на систему РКС:
• отклонения секундных расходов топлива, величины удельной тяги,
массы ракеты, из-за температурных колебаний окружающей среды;
• ошибки в настройке двигательной установки;
• отклонение тяги двигателя PK из-за работы регулятора системы СОБ;
• разброс импульса последействия тяги первых ступеней;
• разброс лобового сопротивления ракеты из-за действия продольной
составляющей ветра.
Каналы боковой и нормальной стабилизации обеспечивают полет по
заданной траектории за счет поддержания нулевых значений боковой и
нормальной скоростей.
Система угловой стабилизации (автомат стабилизации) управляет
движением ракеты вокруг центра массы. Управление осуществляется
раздельно в каждой из трех плоскостей – тангажа, рысканья и крена. Автомат
стабилизации обеспечивает неизменность направления вектора продольной
скорости ракеты и угла крена, а также изменения этих величин в
соответствии с заданной программой.
13
Вид программ изменения угла тангажа и крена (задается или как
функция времени, или как функция кажущейся скорости). По каналу
рыскания программой обычно задается нулевой угол.
Чувствительными
органами
автомата
стабилизации
являются
контрольно-измерительные датчики гироскопических приборов. Полученные
сигналы рассогласования после усиления поступают на исполнительные
органы (рулевые машины). Для обработки сигналов рассогласования,
поступающих от гироскопов, датчиков угловых скоростей (ДУС), датчиков
ускорений и т.д., могут использоваться бортовыми ЦВМ.
Для стабилизации ракеты на активном участке требуются значительные
по величине управляющие силы и моменты, т.к. момент инерции ракеты,
особенно в плоскостях тангажа и рыскания, может быть весьма значителен.
Стабилизация может осуществляться с помощью газоструйных и воздушных
рулей,
вспомогательных
двигателей,
поворотных
сопел,
поворотом
маршевых двигателей и т.п. Пример применения газоструйных и воздушных
рулей – ракета «ФАУ-2», при этом надо отметить, что двигатель этой ракеты
из 25 тонн тяги около 600 кгс терял на газоструйных рулях. Это очень много.
Поэтому, сейчас газоструйные рули применяются лишь на некоторых боевых
ракетах тактического назначения. Обычно они используются вместе с
воздушными рулями, располагаемыми на стабилизаторах. Ясно, что при
выходе из плотных слоев атмосферы воздушные рули полностью теряют
свою эффективность.
Пример применения рулевых двигателей, работающих на основных
компонентах топлива – ракета-носитель «Восток». Рулевые сопла могут
действовать на газогенераторном газе. При двигательной установке с одним
двигателем он может устанавливаться на карданной подвеске, что позволяет
изменять направление тяги в двух плоскостях. Если ДУ состоит из
нескольких двигателей, то двигатель достаточно поворачивать только в
одной плоскости (недостаток – большие габариты и масса системы
подвески).
14
Наиболее оптимальным является способ управления вектором тяги
путем рассогласования тяг отдельных двигателей многодвигательной
установки.
Система СОБ позволяет существенно снизить величины гарантийных
запасов компонентов топлива, что повышает дальность стрельбы или
позволяет увеличить полезную нагрузку. Кроме того, система СОБ позволяет
снизить требования к точности заправки баков компонентами, это упрощает
эксплуатацию ракеты.
Наличие
системы
СОБ
исключает
необходимость
стабилизации
соотношения компонентов в ЖРД.
Основные возмущения, действующие на систему СОБ:
• перелив одного из баков;
• ошибка подстройки двигателя на расчетное значение соотношения
компонентов;
• разброс плотности компонентов топлива за счет сортности, влияние
изменения температуры топлива в баках;
• работа системы РКС.
Чувствительными
элементами
СОБ
являются
датчики
уровня
компонентов топлива, которые устанавливаются в каждом из баков. Типы
датчиков – емкостные, индуктивные, ультразвуковые и т.д. Показания
датчиков сравниваются и вырабатывается команда, в соответствии с которой
изменяется проходной сечение дросселя системы СОБ, установленного на
одной из топливных магистралей двигателя. В результате увеличивается или
уменьшается соотношение компонентов топлива. Известны ДУ, где дроссели
устанавливаются по обеим линиям подачи топлива, но обычно дроссель
устанавливают по линии подачи горючего.
Надо отметить, что изменение компонента ограничивается таким
образом, чтобы диапазон изменения соотношения компонентов составлял не
более 3…5% от расчетного значения. Это делается для того, чтобы двигатель
15
не вышел за диапазон области изменения тяги, где могут быть ощутимые
потери удельного импульса.
Система аварийной защиты двигателя (САЗ) контролирует работу
двигателя по ряду параметров, в зависимости от их изменения выявляют
аварийную ситуацию и через систему управления ракетой вырабатывают
команду на выключение двигателя и на срабатывание системы аварийного
спасения (САС) полезного груза. САЗ включает в себя датчики, непрерывно
измеряющие контролируемые параметры, систему логической обработки
результатов
измерения.
Определение
аварийной
ситуации
двигателя
проводиться по одному из параметров.
1.2 Понятие о системах автоматического управления
двигательных установок
Система автоматического управления (САУ) ЖРД включает в себя ряд
систем автоматического регулирования (САР) функционально связанных
между собой и предназначенных для выполнения основной задачи –
обеспечения полета ракеты в заданную точку космического пространства и
придания ей требуемой скорости при всех возможных погодных условиях и
внутрисистемных возмущающих воздействиях.
САУ ЖРДУ состоят из следующих САР:
• тяги двигателя или давления в КС;
• соотношения компонентов топлива в КС и газогенераторе;
• синхронного опорожнения компонентов топлива из баков (СОБ);
• наддува и дренажа топливных баков.
Система автоматического регулирования тяги или давления в камере
сгорания двигателя предназначена для поддержания на заданном уровне или
изменения по программе в пределах допустимой погрешности регулируемого
параметра, то есть тяги или давления в камере сгорания без вмешательства
человека – оператора. В такой САР двигатель называют объектом
16
регулирования, а устройство, при помощи которого осуществляется
регулирующее воздействие на него – регулятором.
Для пояснения сути функционирования САР ЖРД рассмотрим систему
регулирования давления в КС ЖРД с однокомпонентой вытеснительной
системой топливопитания. Давление в КС двигателя устанавливается
программным механизмом ПМ (рис. 1.2.1), сигнал на выходе которого
сравнивается в элементе сравнения ЭС с усиленным сигналом от датчика
давления, установленного в камере сгорания. При отклонении тяги от
программного значения по тем или иным причинам появляется сигнал на
выходе элемента сравнения ЭС, который усиливается в усилители мощности
У и подается на вход в электропривод ЭП. Электропривод, изменяя затяжку
пружины газового редуктора, изменяет давление наддува бака с топливом.
Расход топлива изменяется и давление в камере сгорания двигателя
становиться равным программному значению. Сигнал с выхода элемента
сравнения ЭС становиться равным нулю и процесс регулирования
прекращается.
Рис.1.2.1
Функциональная
схема САР давления в камере
сгорания
однокомпонентного
ЖРД с вытеснительной системой
топливопитания: ДД – датчик
давления; УН – усилитель
напряжения; ЭС – элемент
сравнения; ПМ – программный
механизм; УМ – усилитель
мощности; ЭП – электропривод
Соотношение компонентов топлива (окислителя и горючего) может
существенно влиять на процесс горения в камере сгорания и газогенераторе
двигателя. Отклонение коэффициента соотношения компонентов в основной
камере сгорания на номинальном режиме работы двигателя не приводит к
17
сильному отклонению температуры и газовой постоянной в камере сгорания
и
как
следствие
изменению
тяги
двигателя.
Поэтому
не
всегда
предусматривается специальная САР соотношения компонентов топлива в
основной камере
сгорания двигателя.
В
этом случае
соотношение
компонентов косвенно поддерживается системой регулирования расхода
компонентов топлива или системы синхронного опорожнения баков.
В жидкостном газогенераторе (ЖГГ), работающем на избытке одного
из компонентов топлива, наблюдается обратная картина, т.е. незначительное
изменение соотношения компонентов ( χ ) приводит к существенному
изменению
его
выходного
параметра
требования по точности поддержания
χ
(температуры
газа).
Поэтому
в ЖГГ более жесткие. Следует
χ
отметить, что за счет изменения соотношения компонентов
в ЖГГ при
помощи регулятора расхода производится изменение частоты вращения
ротора турбонасосного агрегата (ТНА), расхода компонентов топлива и в
конечном счете тяги двигателя.
Весьма важным по эффективности использования запаса топлива в
ракете является одновременное расходование компонентов топлива из баков.
Избыток одного из компонентов в баке в конце полета ракеты обусловлено
работой ЖРД на нерасчетном режиме по соотношению компонентов [7, 17,
43]. Для уменьшения остатка одного из компонентов топлива в двигателе
предусматривается САР синхронной выработки компонентов из баков или их
синхронного опорожнения. Объектом регулирования в данной системе
являются баки, а регулируемым параметром – уровни компонентов топлива.
Регулирование
процесса
осуществляется
путем
синхронного
дросселирования
опорожнения
подачи
баков
одного
или
(СОБ)
обоих
компонентов топлива в основную камеру сгорания двигателя. При этом
может изменяться незначительно тяга двигателя, которое компенсируется
работой системы РКС или тяги двигателя.
Для
определения
степени
несинхронности
опорожнения
баков
применяются датчики расхода компонентов, сигнал с выхода которых
18
подается в счетно-решающее устройство, которое в свою очередь подает
сигнал на дросселирование одного из компонентов (который израсходован
меньше).
В отличие от САР давления газа Pк (t ) и соотношения компонентов
система СОБ включает в себя инерционные объекты в виде баков,
характерное время выработки которых исчисляется десятками секунд,
поэтому требования к динамическим характеристикам этой системы менее
жесткие.
Необходимость САР давления наддува компонентов топлива в баках
обусловлено требованием обеспечения кавитационного запаса насосов ТНА с
учетом давления насыщенных паров. Особенно жесткие требования к этой
системе предъявляются к ЖРД с криогенными компонентами. Объектом
регулирования в этой системе являются газовые полости топливных баков,
регулятор – агрегат поддерживающий давление в баках. САР давления газа в
баках может быть построена по разомкнутой (без контроля давления) и
замкнутой (с обратной связью) схемам. Наддув баков может осуществлятся
либо
от
отдельного
источника
давления,
либо
парами
основных
компонентов, либо по комбинированной схеме. Объект регулирования
достаточно
инерционный
и
особые
требования
по
динамическим
характеристикам к этой САР не выдвигаются.
Система
дренажа
необходима
для
исключения
передавливания
топливных баков давлением насыщенных паров (криогенных компонентов)
или избыточным давлением за счет нештатной работы системы наддува
баков.
Эти два регулятора, как правило, делают совмещенными, т.е. в одном
агрегате реализуются функции наддува и дренажа баков. Основным
элементом этого агрегата является регулятор давления газа к собственной
устойчивости которого предъявляются жесткие требования. Неустойчивость
регулятора является причиной быстрого износа седла клапана, вибрации и
разрушения самого агрегата.
19
1.3 ЖРД с вытеснительной системой подачи
топлива и газовым аккумулятором давления
ЖРД с вытеснительной системой подачи топлива (ВПТ) применяются
на второй и третьей ступенях ракеты, где в качестве вытесняющего газа
используются гелий, находящийся в шаровых баллонах под давлением 30
МПа. Пример ЖРДУ такой ПГС показан на рисунке [9, 11]1.3.1.
Запуск двигателя начинается после
отделения первой ступени ракеты
включением
программного
токораспределителя, который через
определенный промежуток времени
подает сигнал в систему управления
двигателя.
Вначале
срабатывают
электропневмоклапаны (ЭПК) 5 и
гелий из баллона 2 через редуктор 3,
обратный клапан 10 поступает в
камеру сгорания (КС) по линии
подачи горючего. Затем открывается
ЭПК
4
и
гелий
поступает
в
пневмоприводы клапанов 6 и 9,
Рис. 1.3.1 – Пневмогидравлическая схема
ЖРДУ
с
вытеснительной
системой которые одновременно открываются,
топливопитания
прекращая дренаж баков.
Через эти клапаны гелий поступает в баки горючего – несимметричный
диметилгидразин
(НДМГ)
7
и
окислителя N 2O4 .
При
достижении
определенного давления в баках замыкается реле давления 8 и включаются
электрогидроклапаны (ЭГК) 19 и давлением окислителя открывается его
главный клапан 20. При полном открытии клапана 20 замыкается цепь ЭГК
13 и открывается главный клапан горючего 21 и закрывается обратный
20
клапан 10. Компоненты топлива, поступающие в КС 16, самовоспламеняются
и двигатель выходит на основной режим работы.
Для изменения направления вектора тяги двигателя камера крепится
шарнирно и может откланяться на угол ±3 от нейтрального положения в
0
двух плоскостях с помощью гидравлических рулевых приводов. Подвод
компонентов топлива к КС при этом осуществляется сильфонами 18. Тяга
двигателя поддерживается постоянно с погрешностью не более ±3 .
0
Функциональная схема САР тяги двигателя представлена на рисунке 3.2.
Рисунок 1.3.2 – Функциональная схема САР
тяги двигателя (давления в КС) ЖРДУ с
вытеснительной системой топливоподачи:
PR - давление в КС (тяга); ДД – датчик
давления в КС; УН – усилитель
напряжения; П М – программный
механизм; УМ – усилитель мощности; ЭП –
электропривод; ГР – газовый редуктор; ТБ –
топливные баки; КС – камера сгорания
Давление в КС 16 или тяга двигателя измеряется с помощью датчика
давления ДД 15, усиливается в усилителе напряжения УН и подается в
программный механизм ПМ, где сравнивается с программным значением PK .
Сигнал рассогласования между фактическим и предписанным значениями PK
усиливается в усилителе мощности и поступает на вход электропривода ЭП,
который изменяет настройку газового редуктора ГР. Давление в топливных
баках ТБ изменяется, что приводит к изменению расхода компонентов
топлива и восстановлению давления в КС или тяги до исходного уровня.
Для ракеты-носителя космического аппарата важно, чтобы остаток
топлива в баках в конце активного участка траектории полета был
наименьшим.
Для
этого
в
ЖРДУ
предусмотрена
система
СОБ,
функциональная схема которой представлена на рисунке 1.3.3. Сигналы с
датчиков расхода компонентов ДРО , ДРГ 17 преобразуются в усилителях –
преобразователях сигналов ПСО , ПС Г и передаются в счетно-решающее
21
устройство СУ, в котором вычисляется объем израсходованного горючего и
окислителя, определяется какой из компонентов отстает или опережает от
расчетного значения. Результат вычисления в виде сигнала усиливается в
усилителе мощности УМ и передается электропривод для изменения
положения дроссельного крана ДК 12 и соответственно изменения расхода
горючего с тем, чтобы обеспечить равномерную выработку компонентов
топлива из баков. При этом возможны большие отклонения от оптимального
соотношения компонентов в КС (до ±20 % ), что будет вызывать изменение
тяги ДУ.
Рисунок 1.3.3 – Функциональная схема
системы регулирования синхронного
опорожнения баков ЖРД: КС – камера
сгорания; ДРО
- датчик расхода
окислителя; ДРГ - датчик расхода
горючего; БО – бак окислителя; БГ –
бак горючего; ДК – дроссельный кран;
ЭП – электропривод; УМ – усилитель
мощности; ПСО – преобразователь
сигнала с датчика расхода окислителя;
ПСГ – преобразователь сигнала с
датчика расхода горючего; СУ – счетнорешающее устройство
В этом случае вступает в работу система регулирования тяги двигателя.
При достижении ступенью ракеты заданной скорости полета по команде от
системы РКС обесточиваются ЭПК 4 и 28, закрываются ЭГК 13 и 19, главные
клапаны 20 и 21, а клапаны 6 и 9 прекращают подачу гелия в баки и
открывают
дренажные
каналы.
Одновременно
происходит
продувка
магистрали горючего, а затем размыкается цепь ЭПК 5.
Рассмотрим назначение некоторых элементов, не участвовавших в
указанных выше операциях. Шайба 22 предназначена для экспериментальной
настройки соотношения компонентов топлива в процессе технологической
отладки двигателя на стенде, так как давления в баках одинаковые,
гидравлические сопротивления магистралей могут быть различные. Реле
давления 8 служит для открытия клапана окислителя 20 только в том случае,
22
когда давление в баке “О” достигнет расчетного значения. Реле давления 14
служит для подачи команды на аварийное выключение двигателя, если на
запуске давление в КС не достигнет заданной величины, с тем чтобы через
некоторое время повторять запуск. Фильтр 17 в магистрали окислителя
служит для предохранения тракта охлаждения и отверстий форсунок от
засорения твердыми частицами. Обратные клапаны в клапанах наддува баков
применены для предотвращения смещения паров компонентов, если 6 и 9 не
закроются.
Баки ДУ сделаны совмещенными. Для предохранения от разрушения
промежуточного днища при действии на него усилий, возникающих из-за
случайного возрастания давления, в одном из баков предусмотрено
разгрузочное устройство. Оно состоит из дифференциального реле 25 и
нормально закрытых ЭПК 23 и 27. Если давление в одном из баков
повышается, то реле 25 замыкает цепь соответствующего ЭПК и часть газа из
этого бака стравливается.
Для предохранения от разрушения стенок баков при чрезмерном наддуве
предусмотрены предохранительные клапаны 24 и 26.
1.4 Пневмогидравлические схемы ЖРДУ без дожигания компонентов
В ЖРД с насосной подачей топлива (НПТ) компоненты топлива
подаются
в
камеру
сгорания
при
помощи
центробежных
насосов,
приводимых во вращение турбиной, рабочим телом которого является газ. В
зависимости от использования газа на выходе из турбины все ЖРД с НПТ
подразделяются на две большие группы: двигатели без дожигания (открытой
схемы) и двигатели с дожиганием отработавшего в ЖГГ и турбине газе
[9,11].
ЖРД без дожигания относятся к двигателям первого поколения, в
которых продукты сгорания в газогенераторе после срабатывания на турбине
использовались не эффективно. Температура газа на входе в турбину не
23
может быть больше 1200 К из-за снижения её прочности. Известно, что при
низких температурах процесс горения идет не оптимально. Кроме того,
утилизация газа происходит в дополнительных соплах при малой степени
расширения. Поэтому удельный импульс тяги в таких двигателях будет
существенно ниже удельного импульса ЖРД с дожиганием. Расход топлива
на привод ТНА в двигателях без дожигания может составлять (2…3) % от
расхода топлива в основную КС, причем в газогенератор, как правило,
подаются такие компоненты, что и в КС.
Рассмотрим ПГС одного из таких двигателей, работающих на
окислителе N 2O4 и горючем – аэрозине – 50 (смесь 50% НДМГ и 50%
N 2 H 4 ) (рис. 1.4.1).
Программа
запуска
двигателя
заложена в бортовую ЭВМ. Перед
запуском топливные баки надувают
от бортового газового аккумулятора
давления 1. При открытии клапана 2
газ через редуктор 3 и обратные
клапаны 4, прорыв мембраны 5,
поступает в топливные баки 6.
После наддува баков 6 открывают
разделительные
компоненты
клапаны
топлива
7
и
заливают
насосы 9 и магистрали до главных
клапанов 13 и 21. Подается команда
на
воспламенение
пиростартера
19,
газы
заряда
которого
Рис. 1.4.1 – Пневмогидравлическая схема
турбину
18
и
ЖРДУ без дожигания и жидкостным раскручивают
газогенератором, работающим на основных
истекают через поворотные сопла
компонентах топлива
12.
24
Когда давление горючего за насосом достигнет определенного значения,
оно открывает управляющий клапан 22, который в свою очередь открывает
главный клапан горючего 21 и связанный с ним главный клапан окислителя
13.
Топливо поступает через дроссельные шайбы и сильфоны в КС, где и
самовоспламеняется. Одновременно через фильтры 17, сопла Вентури 20,
обратные клапаны 24 поступает в жидкостный газогенератор (ЖГГ) 8.
Обратные клапаны 24 отрегулированы таким образом, что в ЖГГ вначале
подается горючее, иначе окислитель вызвал бы догорание пороховых газов,
имеющих восстановительный состав, повышение температуры газов и
разрушение лопаток турбины. В течение одной секунды пороховые газы
догорают и дальнейший разгон
ТНА происходит за счет газов ЖГГ
основных компонентов топлива.
Тяга двигателя поддерживается постоянной в пределах определенного
допуска кавитирующими соплами Вентури, расход компонентов топлива в
которых постоянен. Таким образом, в ЖГГ поддерживается постоянными
соотношение компонентов
и их суммарный расход. При этом турбина
развивает
постоянную
определенную
мощность,
что
обеспечивает
постоянство расхода компонентов в основную КС. Управление ракетой по
тангажу и рысканию осуществляют поворотом КС,
а по крену – двумя
поворотными соплами 12.
Заданное соотношение компонентов топлива в КС обеспечивают
предварительной настройкой топливных магистралей двигателя.
Наддув топливного бака горючего на основном режиме работы
двигателя осуществляют газом из-за турбины, охлажденным горючим в
теплообменнике 23, а бака окислителя – его парами, получаемыми в
теплообменнике 11.
Выключение двигателя осуществляют закрытием отсечных клапанов 10,
через которые подавались компоненты топлива в ЖГГ.
1.5 Пневмогидравлические схемы ЖРДУ
25
с дожиганием компонентов
ЖРДУ с дожиганием газа на выходе из ЖГГ обладает большей удельной
тягой, поэтому нашли широкое применение. В таких двигателях полная
газификация одного из компонентов топлива может происходить в тракте
охлаждения КС или в ЖГГ [9, 11,43].
Схема ЖРДУ, выполненной по первому способу представлена на рис.
1.5.1.
При запуске открывается клапан
1.
Под
давлением
самонаддува
происходит заливка насосов ТНА 2 и
магистралей компонентов топлива до
клапанов 4 и 11. Часть газообразного
кислорода
O2
и
водорода
H2
поступают в воспламенитель 9 и
зажигаются
с
помощью
электроискровых свечей. Остаток H 2
дренируется через клапан 5, который
закрывается
при
поступлении
Рис. 1.5.1 – Пневмогидравлическая схема бортовую
ЭВМ
сигнала
ЖРДУ с дожиганием и отбором газа для
турбины ТНА из тракта охлаждения камеры поступлении горячего газа в КС.
сгорания двигателя
в
о
Давлением горючего открывается его главный клапан 4 и водород через
регулятор 3, турбину ТНА и нижнюю полость головки поступает в КС 7. При
этом верхняя полость головки продувается гелием через обратный клапан 12.
Для раскрутки турбины достаточно тепловой энергии, получаемой
водородом от стенок корпуса КС. После достижения определенного давления
за насосом кислорода открывается главный клапан окислителя 11,
закрывается обратный клапан продувки 12 и кислород через регулятор 10 и
верхнюю полость головки поступает в КС, где начинается горение.
26
Одновременно через обратные клапаны 6 пары компонентов топлива
поступают в баки для их наддува, причем кислород газифицируется в
теплообменнике 8. Подогрев водорода в тракте охлаждения корпуса КС
увеличивается и двигатель плавно выходит на основной режим работы.
Тяга двигателя устанавливается по сигналу от системы РКС (рис. 1.5.2).
Отклонение кажущейся скорости ракеты от заданного программой значения
фиксируется датчиком PКС , усиливается и подаётся на электропривод
дроссельного крана ДК 3. Расход газообразного водорода на турбину
изменяется, расходы компонентов топлива на выходе из насосов изменяются,
что приводит к изменению давления в КС и тяги двигателя. Ускорение
ракеты изменяется и кажущаяся её скорость приближается к программному
значению.
Рис. 1.5.2 – Функциональная схема
системы регулирования
тяги ЖРДУ по сигналу от РКС
В двигателях с дожиганием газогенераторного газа на основе подогрева
одного из компонентов в ЖГГ, работающих на основных компонентах
топлива, весь расход одного из компонентов топлива поступает в
газогенератор, где происходит его разложение или же к нему подмешивается
часть расхода другого компонента с таким расчетом, чтобы температура газа
на входе в турбину не превышала допустимую величину. При подмешивании
компонента в ЖГГ происходит горение топлива в определенной зоне,
продукты сгорания которой подогревают основной компонент топлива. Для
обеспечения требуемого напора подмешиваемого в ЖГГ компонента за
основным насосом устанавливается дополнительно малорасходный насос.
После расширения в турбине газ вводится в КС, куда поступает другой
компонент и процесс в камере протекает при оптимальном соотношении
27
компонентов. Если используется окислительный ЖГГ, то для раскрутки ТНА
необходима установка отдельной пусковой пиротурбины. Объясняется это
тем, что пороховой газ имеет восстановительные свойства и при смешении
его с газом окислительного ЖГГ в турбине будет происходить догорание,
сопровождающиеся повышением температуры, что недопустимо.
1.6 Требования к качеству переходных процессов
в системе регулирования ЖРД
Одним из эффективных ЖРД, применяемых в качестве исполнительного
элемента системы управления ракеты, являются ЖРД с дожиганием
отработанного в газогенераторе газа. В таком двигателе регулятор расхода
компонента
топлива
установлен
в
магистрали
подачи
горючего
в
двухкомпонентный газогенератор [11](рис. 1.6.1).
Рис. 1.6.1 - Пневмогидравлическая
схема ЖРД с дожиганием и
жидкостным
газогенератором,
работающем
на
основных
компонентах топлива: Г – горючее; О
– окислитель; 1 – разделительные
клапаны;
2
–
жидкостный
газогенератор; 3 – главный клапан
окислителя; 4 – турбонасосный
агрегат; 5 – камера сгорания; 6 –
дроссель
системы
опорожнения
баков; 7 – главный клапан горючего;
8 – выхлопное сопло пиротурбины; 9
– пиротурбина; 10 – клапан горючего
газогенератора; 11 – пиростартер
(твердотопливный газогенератор); 12
– регулятор расхода горючего в
газогенератор (тяги); 13 – датчик
давления газа в камере сгорания
двигателя
Весь расход одного из компонентов топлива, например, окислителя,
поступает в газогенератор, где к нему подмешивается часть горючего с таким
расчетом, чтобы температура газа на входе в турбину (на выходе из
газогенератора) не превышала допустимую величину. При подмешивании
горючего в газогенераторе происходит горение топлива в центральной зоне,
28
продукты сгорания которой подогревают весь окислитель. Для обеспечения
требуемого напора подмешиваемого горючего за основным насосом
устанавливается
дополнительный
насос
малой
производительности.
«Кислый» газ после расширения в турбине вводится в камеру сгорания, куда
поступает второй компонент топлива, и в дальнейшем процесс горения в
камере протекает при оптимальном соотношении компонентов. Для
начальной раскрутки ротора турбонасосного агрегата нужна отдельная
пусковая пиротурбина.
Регулирование тяги двигателя осуществляется изменением расхода
подмешиваемого в газогенераторе горючего при помощи регулятора расхода
по команде от систем стабилизации и регулирования кажущейся скорости
ракеты.
Регулирование степени синхронного опорожнения баков топлива
осуществляется дросселированием подачи горючего дросселем 6 по команде
со счетно-решающего устройства, на вход которого подаются усиленные и
преобразованные сигналы с расходомеров компонентов топлива.
К ЖРД предъявляются как общие требования, не зависящие от
конкретных условий его эксплуатации, так и специальные требования.
Общие требования в свою очередь делятся на технические, производственноэкономические и эксплуатационные.
К основным техническим требованиям относятся:
- экономичность работы, определяемая удельным импульсом тяги;
- надежность в течение заданного времени работы;
- малые удельная масса и габариты при заданной тяге;
- устойчивая работа на всех режимах и при переходе с одного режима на
другой;
- ограниченное «вредное» влияние на ракету (высокий уровень вибрации,
неуравновешенных сил и моментов);
- малое время на подготовку к запуску.
К производственно-экономическим требованиям относятся:
29
- простота и технологичность конструкции;
- применение недефицитных и дешевых материалов;
- наименьшая стоимость двигателя при заданных выходных параметрах.
Эксплуатационные требования определяются:
- возможностью осмотра, проверки и быстрой заменой агрегатов;
- удобством монтажа двигателя на ракете;
- временем хранения двигателя, включая заправленное состояние;
- условиями транспортировки на дальние расстояния в собранном виде или
по частям.
Специальные
требования
к
двигателю
в
основном
связаны
с
обеспечением заданных его динамических свойств. Динамические процессы
в ЖРД происходят во время его запуска, перехода на промежуточную и
основную ступени тяги, регулирования тяги на основном этапе полета
ракеты и выключения двигателя. Требования к динамическим процессам в
двигателе связаны с ограничениями давления в камере сгорания или тяги,
давления и расхода компонентов в топливоподводящих магистралях и
агрегатах, с обеспечением устойчивости системы управления и заданных
показателей качества регулирования основных ее параметров.
Некоторые ограничения, накладываемые на процесс изменения давления
газа в камере сгорания двигателя, показаны на рис. 1.6.2.
⎛ dPк ⎞
⎜
⎟
⎝ dt ⎠ max
⎛ dPк ⎞
⎜
⎟
⎝ dt ⎠ min
Рис. 1.6.2 - Циклограмма работы двигателя во время полета ракеты
30
Участок
τ 1 с момента запуска двигателя «Зп» до команды перевода с
промежуточной
ступени
тяги
на
главную
«Гл»
имеет
следующие
ограничения:
-
скорость
нарастания
⎛ dPк ⎞
⎜
⎟ ограничена
⎝ dt ⎠ max
тяги
(давления
ударно-волновыми
в
камере
нагрузками,
сгорания)
сверху
действующими
на
конструкцию ракеты в момент ее старта;
⎛ dP ⎞
- скорость нарастания давления снизу ⎜ к ⎟
ограничена требованием
⎝ dt ⎠ min
уменьшения массы сгоревшего топлива на этом участке работы двигателя и
необходимостью быстрого прохода зоны критической частоты вращения
ротора ТНА.
На предварительной ступени тяги двигателя ограничение давления в
камере сгорания связано с недопустимостью заброса тяги выше допустимого
уровня, определяемого отрывом ракеты от пусковой площадки.
На участке
τ 2 агрегаты регулирования тяги двигателя действуют
неэффективно. Поэтому указанные ограничения удовлетворяются подбором
мощности турбины, интенсивностью и длительностью продувки магистралей
двигателя.
Участок
τ3
– переход с предварительной на главную ступень тяги
происходит под контролем автоматики двигателя. В этот момент также
действуют ограничения давления: сверху – недопустимостью большой
скорости вращения ротора ТНА, которая могла бы привести к провалам
давления на входах в насосы и соответственно к кавитационному срыву,
снизу – необходимостью уменьшения массы сгоревшего топлива на этом
участке и быстрым прохождениям зоны неустойчивого горения в камере
сгорания.
Требования на участке
τ3
связаны с обеспечением устойчивости
системы регулирования тяги двигателя и заданных показателей качества
31
регулирования.
Необходимо,
чтобы
двигатель
с
регулятором
тяги
удовлетворял требованиям по быстродействию и точности выполнения
команд, поступающих от систем управления кажущейся скорости, систем
стабилизации ракеты и опорожнения баков.
Требования к изменению давления на участке останова
τ4,
начиная с
команды на выключения двигателя «КВ», обусловлены двумя причинами. В
многокамерных двигателях необходимо обеспечить одинаковый импульс
последействия тяги каждой камеры во избежание значительных моментов
сил, которые могли бы повернуть ракету. В однокамерных двигателях
необходимо обеспечить стабильный (постоянный) импульс последействия
тяги для более точного задания конечной скорости ракеты.
Следующее ограничение на предварительной ступени тяги двигателя это
не превышение заброса тяги выше допустимого уровня:
пр )
( Pк )(max
≤ ( Pк ) кп ,
где
(1.6.1)
( Pк ) кп - допустимое значение давления в камере сгорания, которое
составляет 50…70% от ( Pк ) ном на момент подъема ракеты (срабатывание
концевых выключателей подъема). С этого момента начинается отсчет
времени полета ракеты – так называемый условно “нуль” времени. Указанное
требование связано с недопустимостью подскока ракеты на старте.
Выполнить требование (1.6.1) сложно, так как на этом участке агрегаты
регулирования тяги двигателя функционируют неэффективно.
Обычно эти требования удовлетворяются подбором мощности пусковой
турбины, интенсивности и длительности продувки магистралей двигателя. В
результате можно обеспечить эмульсионный (плавный) запуск двигателя.
Выбор
соотношения
между
( Pк ) ном
и
( Pк ) кп
определяется
из
соображения устойчивости ракеты на начальном участке полета: когда
скорость мала и устойчивость обеспечивается путем увеличения тяги.
Участок
τ2
- переход с предварительной на главную ступень тяги
происходит под контролем автоматики двигателя. Скорость выхода на
32
главную ступень тяги также ограничена сверху и снизу. Ограничение сверху
объясняется недопустимостью значительной скорости вращения ТНА по
времени
dnТНА
, которая могла бы привести к большим провалам давления на
dt
входах в насосы, а, следовательно, к развитию их кавитационного срыва.
Ограничение снизу обусловлено необходимостью уменьшения расхода
топлива и быстрого прохождения зоны неустойчивого горения в камере
сгорания.
Требования к закону изменения Pк (t ) на участке τ 4 останова двигателя
обусловлены двумя аспектами. Первый аспект касается многокамерных ДУ
нижних ступеней и он связан с обеспечением стабильного импульса
последействия
тяги
каждой
камеры
I пд = ∫ Pк (t )dt .
При
этом
τ4
предотвращается появление значительных моментов сил в плоскостях
стабилизации при выключение ДУ [14]. Второй аспект касается обеспечения
минимального импульса последствия тяги однокамерных двигателей верхних
ступеней для более точного задания конечной скорости ЛА.
В интервале основной работы
τ3
к ДУ предъявляется требование по
быстродействию и точности выполнения команд, поступающих от РКС, АС и
СОБ.
Динамические
свойства
контуров
РКС
и
АС
целесообразно
рассматривать в частотной области. Требование по быстродействию к ДУ в
контуре СОБ никогда не были ограничительными, так как баки, как объекты
регулирования,
являются
медленнодействующими
с
характерными
временами – секунды, в то время как протекающие в ЖРД процессе длятся
десятые и сотые доли секунды.
В процессе работы ДУ давление на входе в насосы ТНА имеет
колебательный
характер,
топливоподводящей
обладает
что
системы
акустической
связано
с
большой
“бак-трубопровод-насос”.
емкостью
полости
на
добротностью
Такая
входе
в
система
насосы
33
Ca = Vн /( ρ кт а 2 ) , акустической индуктивностью трубопроводов L =
ρ lтр
Fтр
и
их гидравлическими сопротивлениями Rг , где ρ кт - плотность компонентов
топлива; а - скорость распространения звуковых волн в трубопроводе; lтр длина трубопровода; Fтр - площадь проходного сечения трубопровода; Vн приведенный объем полости на входе в насос.
Добротность
таких
систем,
определяемая
как
отношение
всей
колебательной энергии к ее потери велика. Из соображений экономии
энергетики наддува баков (давления наддува) стремятся уменьшить потери
давления на трение по длине трубопроводов.
Давление на входе в насосы изменяется при разгоне и останове
компонентов топлива, вызванных работой ТНА.
Если сравнивать колебательные процессы Pвх (t ) на участках τ 1 , τ 2 , τ 3 ,
то можно отметить, что выполняются следующие неравенства:
(ωс )3 > (ωс )1 > (ωс ) 2 и δ 2 > δ1 > δ 3 ,
где
(ωс )1 ,
(ωс ) 2 ,
(ωс )3
-
собственные
частоты
колебаний
Pвх (t )
соответственно на участках времени τ 1 , τ 2 , τ 3 , δ1 , δ 2 , δ 3 - логарифмические
декременты затухания собственных колебаний Pвх (t ) на тех же участках
времени.
Указанные
неравенства
объясняются
расходно-перепадной
характеристикой трубопроводов ΔPтр = f (Qкт ) и свойством колебательного
контура в частотной области.
На участке
τ3
τ1
декремент затухания колебаний меньше, чем на участке
и больше, чем на участке
гидравлическим
τ2,
сопротивлением
что обусловлено соответствующим
трубопровода
Pтр = 2 К тр Qкт ,
где
34
К тр =
λтр ρ
2 Fтр2
; λтр - коэффициент гидравлического трения; ρ - плотность
компонента топлива; Fтр - площадь проходного сечения трубопровода.
Рис. 1.6.2 – Характерное изменение
давления на входе в насос ЖРД в
процессе
запуска
и
останова
двигателя
Из последней формулы ясно, что чем больше расход компонента
топлива, тем больше гидравлическое сопротивление трубопровода и
соответственно будет больше декремент затухания колебаний давления на
входе в насос. Известно, что чем больше декремент затухания, тем будет
ниже собственная или резонансная частота колебательного контура.
Рассмотрим ограничения на Pвх (t ) в процессе запуска и останова
двигателя в точках провала давления на участках
τ1
и
τ2
должен быть не
ниже минимального допустимого значения сточки зрения бескавитационной
работы насоса: Pmin ≥ Pнп + ΔPкз , где Pнп - давление насыщенных паров; ΔPкз кавитационный запас по давлению.
Величина ΔPкз на участке
τ2
должна быть больше, чем на
τ1 ,
что
объясняется приводом турбины ТНА от газогенератора, более мощного, чем
пиротурбина. Провал давления на участке τ 2 может быть больше, чем на τ 1 .
Кроме того, провал давления на участке
τ2
труднее прогнозировать из-за
неопределенности фазы команды “Гл” по отношению к колебаниям Pвх (t ) на
предыдущем участке
τ1 .
Наиболее неблагоприятный случай, когда этот
момент “Гл” приходится на провал давления
Pвх (t ) в предыдущем
колебательном процессе. С точки зрения колебательного кавитационного
35
срыва точка “Гл” на Pвх (t ) очень опасна, так как в это время газогенератор
очень чувствителен к изменению соотношения компонентов топлива.
В случае аварийного исхода работы ЖРДУ эта точка “Гл” на Pвх (t )
подвергается тщательному анализу, давление на входе в насос измеряется
двумя или большим числом датчиков динамического давления для
обеспечения достоверности регистрируемой информации.
Величина Pmax на участке
τ1
и
τ3
ограничена сверху максимальным
допустимым напряжением в трубопроводах или их прочностью. Особую
опасность представляет Pmax на участке
τ 3 , когда возникает гидравлический
удар или закрытие главного клапана компонентов топлива. Для снижения
Pmax принимают специальные мероприятия: ступенчатый (плавный) останов
ДУ; закрытие главных клапанов на фоне уменьшения частоты вращения
ротора ТНА; применение на входах в насосы гидравлических демпферов,
хотя они и предназначены несколько для других целей (частотной отстройки
системы “ракета – баки – трубопроводы - двигатель”).
В требованиях к ДУ часто выдвигаются ограничения ряда внутри
двигательных параметров (температуры газов в газогенераторе, частоты
вращения ротора ТНА, соотношения компонентов и других) в процессе
запуска и останова двигателя. Большое значение имеет определение
максимальных значений указанных параметров на стадии проектирования и
доводки ДУ с целью предотвращения забросов и провалов параметров,
могущих привести к потере устойчивости рабочего процесса или к
аварийному исходу испытаний.
1.7 Ограничения, накладываемые на частотные характеристики
САР двигателей
Важной с точки зрения управления ракетой является частотная
характеристика ДУ по каналу регулирования тяги. Кроме очевидных
36
требований обеспечения устойчивости внутридвигательных процессов,
существуют ограничения, обусловленные взаимодействием ДУ с ракетой.
Это взаимодействие можно схематично представить так, как изображено на
рисунке 1.7.1 [16, 20, 26, 29, 34].
В
случае
многокамерной
управление
ДУ
ракетой
часто
осуществляется
путем
рассогласования тяг камер. В этом
случае
ЖРД
исполнительным
РКС
и
Рис. 1.7.1 – Схема динамического
взаимодействия двигательной установки
элементом
с ракетой
АС.
является
органом
систем
Регулирующим
является
регулятор
расхода горючего в газогенератор.
Сигнал от датчиков систем РКС и АС усиливается, обрабатывается и
подается на привод дроссельного крана регулятора расхода того или иного
двигателя, в зависимости от положения и скорости полета ракеты. Таким
образом, для обеспечения устойчивости систем РКС и АС должна быть
достаточно точно определена частотная характеристика ДУ по каналу
управления тягой
Pк
ϕ
Действительно,
(ω ) в диапазоне частот работы автомата стабилизации.
без
учета
динамических
свойств
ДУ
как
исполнительного органа СУ по каналам тангажа и рыскания, а так же из-за
незнания динамических характеристик рулевой машины-привода регулятора
можно потерять устойчивость систем. Если, например, ракета совершает в
плоскости тангажа девиацию
±ϕ , то ДУ должна выработать момент сил
путем рассогласования тяг двигателей в этой плоскости. Однако, если не
учитывать динамику исполнительного органа (двигателя и рулевой машины),
то сигнал может быть сформирован, когда ракета оказалась уже в зоне
пикирования (относительно заданной траектории полета). Это приведет к
37
расходящимся по времени колебаниям относительно заданной траектории
полета. Известно, что при отклонении на ±100...150 относительно заданной
траектории, система управления уже не сможет стабилизировать траекторию
полета ракеты. Для предотвращения этого явления в цепи управления
рулевой машины и двигателя необходимо включить корректирующие
элементы с постоянными времени Т1 и Т 2 . Если передаточная функция
привода рулевой машины равна W рм ( s ) =
1
Tрм s
, а двигателя Wдв ( s ) =
K дв
,
Tдв s + 1
то передаточная функция рулевой машины и двигателя с корректирующими
элементами будет иметь вид:
Wдв( ку ) ( s ) =
К двТ1s (T2 s + 1)
.
Tрм s (Tдв s + 1)
(1.7.1)
Если принять Т1 = Т рм , Т 2 = Т дв , то передаточная функция (1.7.1) будет
равна
Wдв( ку ) ( s ) = К дв
и
контур
регулирования
будет
аналогичен
усилительному звену и соответствовать устойчивой системе. Чтобы добиться
этого, необходимо знать Т рм и Т дв , которые определяются в результате их
частотных испытаний в диапазоне низких частот 0…30 Гц. Величины
постоянных времени Т рм и Т дв находятся в пределах 0,05…0,15 с.
Весьма
важным
является
обеспечение
требуемых
частотных
характеристик ДУ, при которых исключаются совпадения резонансных
частот системы с частотами собственных колебаний компонентов в
топливоподводящих магистралях. При совпадении указанных частот может
наступить
аварийная
ситуация,
связанная
с
потерей
продольной
устойчивости ракеты.
Механизм возникновения продольных колебаний ракеты с ЖРД и
мероприятия
по
предотвращению
неустойчивого
состояния
ракеты
рассмотрены в разд. 5 учебного пособия.
38
Существуют ограничения параметров свободных колебаний в контуре
силового взаимодействия ДУ и РН. Этот контур связывает колебания тяги
(δ Р ) с деформацией корпусных элементов ракеты. Давление Рк в ЖРД даже
при
установившемся
режиме
работы
характеризуется
определенной
нестационарностью. Это связано со способностью протекающих в двигателе
рабочих процессов – процесс горения в камере сгорания и газогенераторе,
движение компонентов в топливоподающих магистралях, ТНА и других
агрегатах.
Такой процесс, являющийся в общем случае случайным, оценивается
спектральной
плотностью
S (ω ) ,
которая
по
физическому
смыслу
пропорциональна мощности колебательного процесса в определенном
интервале частот. В спектре колебаний Pк (t ) могут существовать гармоники
колебаний давления, обладающие достаточно большой мощностью. Таким
образом ЖРД представляет собой генератор осциллирующей силы разных
частот. Опасным является случай, когда собственная частота ракетной
конструкции совпадает с каким-либо тоном колебаний тяги двигателя.
Возникающий
при
этом
резонанс
может
привести
к
разрушению
конструкции ракеты и аварийной ситуации. Поэтому энергетически
значимый спектр колебаний тяги двигателя в низкочастотной области
должен быть ограничен сверху.
1.8 Пневмогидравлические схемы двигательных установок
космических аппаратов
За период развития космической техники разработано большое
количество
различных
КА,
подразделяемых
на
два
существенно
отличающихся друг от друга класса: пилотируемые и автоматические,
причем основным критерием этого деления является обитаемость.
Кроме обитаемости КА классифицируют [2, 4, 5, 18, 37]:
39
•
по скорости, сообщаемой КА (по траектории полета);
•
по времени активного полета (по продолжительности полета};
•
по назначению;
•
по способу ориентации в пространстве;
•
по наличию и типу ДУ;
•
по компоновочным схемам;
•
по методу управления полетом.
По траектории полета КА делят на аппараты для полетов к Луне, к
планетам Солнечной системы и аппараты для полетов с выходом за пределы
Солнечной системы.
Околоземные КА характеризует относительно небольшое удаление от
Земли, периодичность изменения внешних условий и прохождения над
определенными
географическими
районами
Земли,
кратная
периоду
обращения. Они совершают полет в поле тяготения и атмосфере Земли, что
сказывается на времени их существования, эволюции орбиты, внешних
тепловых потоках и некоторых других факторах.
Диапазон размеров и массовых характеристик автоматических КА
очень широк: от КА-карликов с массой в единицы или десятки кг до
КА-гигантов, имеющих массу, исчисляемую тоннами. Разнообразны и их
конструктивно-компоновочные схемы. Однако, несмотря на значительные
внешние
отличия, в
основе построения автоматических
КА лежат
определенные общие закономерности. В общем случае автоматический КА
свободен от ряда ограничений, связанных с разработкой пилотируемого
варианта, и имеет большее разнообразие форм, размеров и более широкий,
чем у пилотируемых КА, диапазон массовых характеристик. Автоматические
КА более просты по составу бортовых систем и агрегатов, хотя отдельные их
системы и элементы конструкции могут быть более сложными, чем у
пилотируемых.
Состав и построение КА определяют такие факторы, как:
40
•
особенность
условий
космического
полета
(вакуум,
невесомость,
радиация) и условий совместного полета с ракетой-носителем (перегрузки,
вибрации, акустическое воздействие);
•
необходимость использования для управления полетом КА наряду с
бортовыми средствами управления канала связи с Землей;
•
особенность динамики орбитального полета, который в основном
происходит под действием сил тяготения и реактивных сил.
Указанные факторы можно считать общими для любого КА
независимо от его назначения. Условия космического полета требуют
введения в состав КА средств, обеспечивающих надежную защиту
аппаратуры от воздействия радиации, вакуума, микрометеоритов, создания
системы
терморегулирования
для
поддержания
температуры
КА
в
допустимых пределах по условиям обеспечения функционирования всех его
элементов.
Для управления полетом автоматический КА должен иметь в своем
составе радиотехнический комплекс и комплекс средств управления,
обеспечивающие так называемый автономный режим полета, при котором
управление осуществляется только бортовыми системами, а также режим с
использованием радиоуправления с Земли, при котором предусмотрен обмен
информацией между аппаратом и наземным комплексом управления (НКУ)
полетом.
Особенностью динамики орбитального полета является то, что для
межорбитальных переходов (изменения высоты, наклонения или других
параметров орбиты, перехода с орбиты на траекторию спуска на Землю или
планету) и поддержания определенного положения КА в космическом
пространстве, т. е. ориентации, КА должен иметь реактивную двигательную
установку не только обеспечивающей вывод на заданную траекторию
(орбиту вокруг Земли, траекторию полета к другим планетам), но и
жидкостными реактивными двигателями малой тяги (ЖРДМТ).
41
Двигатели
космического
малой
тяги
аппарата
на
обеспечивают
траектории,
управление
ориентацию,
движением
стабилизацию,
коррекцию скорости, проведение маневров и создание перегрузок с целью
подачи топлива к маршевому двигателю без газовых включений в условиях
невесомости.
Для
обеспечения
работы
таких
ЖРДМТ
необходима
специальная система питания, включающая в себя агрегаты автоматики
(клапаны, регуляторы, пусковые устройства) баки и баллоны для размещения
топлива и газа.
ЖРДМТ системы управления движением космического аппарата
вместе с системой питания рассматривают как автономную систему,
служащую для получения управляющего усилия за счет реакции истечения
массы газа из сопл двигателей. Эта система получила название системы
стабилизации, ориентации и обеспечения запуска (СООЗ).
Рассмотрим несколько вариантов построения пневмо-гидравлических систем
СООЗ:
•
с газовыми аккумуляторами давления;
•
с использованием газа наддува разгонного блока;
•
с газовыделяющими элементами;
•
с использованием основных компонентов топлива маршевых двигателей;
•
с электронасосной системой топливоподачи.
Наиболее часто встречающимся и поэтому в большей степени
отработанным
является
вариант
конструкции
СООЗ
с
газовым
применением
блоков
аккумулятором давления, которую назовем базовым (рис. 1.8.1).
Другие варианты ПГС отличаются от альтернативного:
•
с
газововыделяющими
элементами
-
газовыделяющих элементов вместо шарбаллонов;
•
с использованием газа наддува разгонного блока – составом пневмоблока
системы наддува;
42
•
с электронасосной системой подачи топлива применением ЖРДМТ с
лучшими характеристиками, наличием электронасосного агрегата подачи и
измененной конструкцией топливных баков;
на основных компонентах топлива.
Рис. 1.8.1. Двигательная установка системы стабилизации, ориентации и обеспечения
запуска с газовым аккумулятором давления (базовый вариант)
Анализируя варианты с точки зрения оптимальности массовых
характеристик, надежности и обеспечения заданных параметров, нужно
отдать преимущество варианту с электронасосной системой подачи топлива.
Общий недостаток всех вытеснительных систем подачи – высокое
давление в баках и соответственно большая толщина стенки и большая
зависимость веса двигателя от времени работы и величины тяги – чем выше
давление в камере двигателя, больше время работы и тяга, тем более
тяжелым получается двигатель в целом с вытеснительной системой подачи.
43
Снижение массы ДУ с электронасосной системой происходит за счет
уменьшения количества заправляемого топлива (снижение гарантийных
запасов), уменьшения массы ЖРДМТ, снижения давления в баках и
соответственно
применения
металлокомпозитной
их
конструкции.
Суммарное снижение массы орбитального блока при применении ДУ ССОЗ с
электронасосной системой подачи топлива по сравнению с базовым
вариантом составляет не менее 30%. Кроме того, при применении
электронасосной системы возможно использование ЖРДМТ с улучшенными
характеристиками Jуд = 310 Нс, что практически невозможно достичь при
вытеснительной системе.
В состав каждого модуля СООЗ входят:
•
ДУ с электронасосной подачей компонентов топлива;
•
блок
автоматики
с
буферным
источником
электропитания
и
периферийным адаптером обмена средств функциональной диагностики и
автономного управления;
•
средства обеспечения теплового режима;
•
механизм сброса, включающий силовую раму, разъемное соединение со
средствами разделения и отделения модуля, механическими узлами
разворота
и
контактными
датчиками
положения,
электрическими
соединителями;
•
средства
бортовых
измерений, включающие датчики
давления и
температуры, входящие в систему централизованного контроля параметров
пневмогидросистемы орбитального блока;
•
средства
функциональной
диагностики,
включающие
датчиковую
аппаратуру, преобразователи-сигнализаторы положения;
•
бортовая кабельная сеть.
ДУ каждого модуля СООЗ состоит из следующих функциональных
частей:
44
•
топливного блока – четырех однокомпонентных топливных баков с
разделителями, заправочными и проверочными горловинами, датчиками
давления и температуры, трубопроводами и элементами крепления;
•
блоков подготовки окислителя и горючего, включающих в себя пусковые
пироклапаны,
двухпозиционные
электромеханическими
приводом
электрогидроклапаны
и
с
микропереключателем
для
электрического контроля положения, клапаны обратные с фильтром,
горловины проверочные;
•
двух идентичных регуляторов подачи компонентов топлива, каждый из
которых представляет собой автономное устройство, объединяющее в себя
два
электронасосных
регулирующую
агрегата,
арматуру,
два
газогидроаккумулятора,
собственный
блок
управления,
запорнодатчики
температуры и давления, проверочные и заправочные горловины, датчики
импульсов;
•
гидроблоков окислителя и горючего, включающих отсечные и пусковые
пироклапаны, шесть дополнительных клапанов с электромеханическими
приводом и микровыключателем для электрического контроля положения,
горловины;
•
заправочные фильтры;
•
блока энергоагрегатов – управляющие и перегрузочные ЖРДМТ,
объединенные
магистралями
подвода
компонентов
топлива
в
два
идентичных коллектора с проверочными горловинами, датчиками давления и
температуры.
Для обеспечения схемной надежности ПГС ДУ модуля СООЗ
строилась из условия, что при отказе одного любого агрегата (включая
разгерметизацию разноименных топливных баков), ДУ модуля СООЗ
сохраняет работоспособность и выполняется программа полета.
ДУ модуля СООЗ состоит из двух функционально независимых
автономных контуров (включая топливные баки, регулятор подачи,
арматуру), объединенных электрогидравлическими связями. ЖРД МТ
45
объединены в двух взаимодублирующих коллекторах, при этом каждый
коллектор в случае разгерметизации может быть исключен из дальнейшей
работы отсечными пироклапанами.
2 СИСТЕМЫ НАДДУВА БАКОВ
И ПОДАЧИ КОМПОНЕНТОВ ТОПЛИВА ЖРДУ
2.1 Схемы систем наддува баков
Наддув баков применяется для обеспечения бескавитационной работы
насосов, а также для получения необходимой устойчивости оболочки баков.
Схемы наддува баков ракет можно классифицировать по способу получения
вытесняющего газа рабочего тела системы наддува [3, 11, 14, 38].
Газовый
аккумулятор
давления.
Вытесняющий
газ
получается
редуцированием сжатого газа высокого давления, находящегося в баллоне
аккумуляторе давления. Это наиболее простая, надежная и распространенная
схема наддува баков. Сжатым газом служит азот или гелий. Баллон со
сжатым газом, например азотом или гелием, помещается в бак с криогенным
компонентом, например в бак жидкого кислорода (рис. 2.1.1).
46
Рис. 2.1.1. Схема наддува баков с газовым аккумулятором давления
Редуцированный холодный газ перед поступлением на наддув бака
проходит через теплообменник. Последний установлен в выхлопной системе
турбины ТНА, где газ подогревается до 500 ... 600 К. Хранение сжатого газа
при низкой температуре снижает необходимый объем аккумулятора
давления, а подогрев в теплообменняхе уменьшает расход, т.е. запас газа. Все
это вместе взятое заметно уменьшает массу системы наддува баков.
Жидкостная
испарительная
схема
наддува.
Вытесняющий
газ
получают из жидкого компонента путем его испарения в теплообменнике.
На рис. 2.1.2 показана схема, в которой вытесняющий газ получается из
основного криогенного компонента - кислорода или водорода, которые
испаряются в теплообменнике, расположенном в газоотводе двигателя с
дожиганием генераторного газа.
47
Рис. 2.1.2. Испарительная схема наддува баков с газом,
полученным из криогенных основных компонентов
Газогенераторная схема наддува. Вытесняющий газ получается в
специальных
“наддувных”
ЖГГ
из
основных
компонентов
топлива
двигателя. Наддув бака с окислителем требует получения окислительного
генераторного газа, а наддув бака с горючим — восстановительного.
Особенность наддувных ЖГГ — более низкие температура газа и расход по
сравнению с ЖГГ привода турбины двигателя без дожигания. Это создает
определенные трудности в организации рабочего процесса. Существуют и
другие схемы наддува бака с компонентами топлива.
Величина
давления
наддува
бака
определяется
из
условия
бескавитационной работы насоса, т. е. получения необходимого давления на
входе в насос Pвх.необ . Давление жидкости на входе в насос Pвх (или напор на
входе H вх = Pвх / ρ ) складывается из давления столба жидкости Pст и
абсолютного давления в баке над свободной поверхностью жидкости Pб .
Учитывая
потери
давления
ΔPтр
в
трубопроводах
и
арматуре,
расположенной на пути от бака до насоса, получим
Pвх = Pб + Pст − ΔPтр
Для летящей ракеты Pст =
(2.2.1)
ρ gh0 , где h0 - начальная высота столба
48
жидкости в баке ракеты, g - ускорение свободного падения.
Для двигателей ракет характерно такое взаимное расположение баков и
насосов, когда баки компонентов топлива расположены выше двигателя. Для
различных компонентов величины Pст получаются различными. При полете
ракеты с действующим двигателем давление столба жидкости будет
переменным. С одной стороны, за счет выработки компонентов из баков
уменьшается высота столба и с другой стороны, ракета при работающем
двигателе всегда движется с осевым ускорением ax . При этом ось ракеты
может быть наклонена к горизонту под углом
ϕ . Тогда общее давление,
действующая на основание столба жидкости высотой h , определяется по
формуле Pст = ρ hax + ρ gh sin ϕ или Pст = ρ gh ( k + sin ϕ ) , где k =
ax
g
осевая перегрузка ракеты
Во время полета ракеты величины h и k изменяются примерно так, как
показано на рис. 2.1.3.
На закон изменения Pст будет влиять также изменение по времени угла
наклона оси ракеты ϕ . Давление столба жидкости будет минимальным после
запуска двигателя; оно оказывается меньше, чем давление в момент старта
ракеты.
Рис. 2.1.3. Напорные характеристики
системы подачи компонентов
топлива
49
Для определения Pст.min необходимо иметь данные о законе движения
ракеты по траектории. Если при расчете насоса по кавитации определена
величина Pвх.необ , то потребное давление в баке Pб должно быть таким, чтобы
при минимальном давлении столба жидкости было обеспечено необходимое
давление Pвх.необ , т. е. Pб = Pвх.необ − Pст.min + ΔPтр .
Повышая давление наддува бака, можно увеличить допустимую
частоту частоты вращения ротора ТНА. Однако при этом возрастают массы
баков и всей системы наддува и масса затрачиваемого для этой цели газа.
Поэтому увеличение частоты вращения ротора насоса за счет давления в
баках возможно лишь в известных пределах.
Потери давления в магистрали от бака до насоса ΔPтр определяют по
обычным формулам гидравлического сопротивления. Обычно величина
давления наддува баков находится в диапазоне 0,2.. .0,6 МПа.
2.2 Принципы построения математических моделей
автономных агрегатов
Создание автоматической системы управления ЖРД является сложной
технической
задачей.
экспериментальным
моделирования
и
При
решении
подходом,
расчета
так
системы
этой
и
на
задачи
пользуются
методами
аналоговых
как
математического
и
цифровых
вычислительных машинах.
Динамическая модель позволяет:
• Моделировать процессы запуска и состояния двигателя, при этом
оптимизируются
программы
управления,
схемы
и
параметры
управляющих устройств;
• Решать задачу технической диагностики аварийных ситуаций; при этом
на модели искусственно воспроизводятся различные дефекты и
разрабатываются критерии их распознавания и корректирования;
50
• Проводить согласование динамических характеристик двигателей и
смежных ракетных систем, это подразумевает расчет и коррекцию,
например, частотных характеристик по каналам управления тягой
δ Pк
δ Pк
(ω ) и продольных колебаний (ω ) .
δ Pвх
δϕ
Совершенно очевидно требования, предъявляемые к любой модели,
заключается в том, что она должна адекватно отображать свойства объекта,
т.е. абстрактным идентификатором объекта. Это достигается тем, что
одновременно с применением модели для решения различных задач проводят
идентификацию модели, используя результаты испытаний двигателей, по
ним могут уточняться значения эмпирических коэффициентов и т.д.
Рассмотрим основные принципы построения динамических моделей
ЖРД.
Первый принцип заключается в самом подходе к моделированию. В
практике составления моделей ЖРД приняты два приема: аналитический и
логический. Аналитический метод построения модели характерен для
объектов, при рассмотрении движения в которых можно выделить какойлибо физический закон. Во втором случае такой возможности нет или она не
очевидна. Тогда модель создается на основании анализа принципа работы
объекта, логики формирования переменных.
Вторым является принцип агрегативности, в соответствии с которым
сложная модель объекта составляется из автономных моделей отдельных
более простых узлов объекта. Во-первых, это упрощает задачу составления
модели ЖРД, во-вторых, это связано с возникающей иногда необходимостью
автономного исследования свойств отдельных агрегатов, например, с целью
экспериментального уточнения каких-либо величин, закладываемых в
расчетную модель. Такая необходимость часто возникает при моделировании
агрегатов автомата.
Третий принцип заключается в степени приближения модели к
свойствам объекта. При решении различных задач динамики ЖРД потребная
51
степень приближения в описании процесса ив том или ином узле различна.
Так, при моделировании переходных процессов, низкочастотных колебаний
можно обойтись гораздо более простыми исходными управлениями
описывающими движение в узле. И наоборот, с увеличением характерных
частот или с уменьшением постоянных времени процессов (например, при
анализе аварийной ситуации) также приближения становятся очень грубыми.
Это приводит к необходимости усложнения модели за счет, например, учета
распределенности параметров, учета акустических свойств узлов и т.д.
Рассмотрим на примере один из этих принципов.
Аналитический способ составления низкочастотной модели камеры
сгорания.
Для составления уравнения динами сгорания воспользуемся законом
сохранения массы, который для установившегося режима работы имеет вид:
m& о + m& г − m& c = 0
(2.2.1)
На неустановившемся режиме это равновесие нарушается, уравнение
баланса масс, заключенное в отклонениях, будет иметь вид:
d δ m = ⎡⎣( m& о + δ m& о ) + ( m& г + δ m& г ) − ( m& с + δ m& с ) ⎤⎦ dt
или с учетом (2.2.1):
dm
= δ m& о + δ m& г − δ m& с ,
dt
(2.2.2)
здесь m – масса газа в камере сгорания.
Из уравнения состояния получим:
m=
PкVк
RTк
и
dm Vк dPк
=
dt RTк dT
если считать, что RTK = const .
Расход газа из камеры определяется формулой газодинамики:
Pк Fкр
k +1
⎛ 2 ⎞ k −1
, где A = k ⎜
m& с = A
⎟ , получаем в отношениях: δ m& с = Bδ Pк .
RTк
⎝ k +1⎠
Таким образом, имеем:
52
Vк d δ Pк
+ Bδ Pк = δ m& о + δ m& г
RTк dt
или в операторной форме:
(Tк + 1) δ P%к = K (δ m%& о + δ m%& г ) = Кδ m%& Σ
где Tк =
(2.2.3)
Vк
1
; K= .
BRTк
B
Передаточная функция камеры сгорания на основании уравнения
δ P%к
K
=
или в относительной форме
(2.2.3) примет вид W ( s ) =
δ m%& Σ Tк s + 1
W (s) =
1
Tк s + 1
Вопрос о степени приближения модели к свойствам объекта можно
рассмотреть на примере модели движения жидкости в трубопроводе, которая
в зависимости от решаемых задач может описываться свойствами
статического звена, апериодического, колебательного или свойствами
системы с распределенными параметрами.
2.3 Схемы и принцип действия газовых регуляторов давления
Газовые регуляторы или редукторы давления применяются в ЖРДУ
для понижения и поддержания давления газа, вытекающего из газовых
баллонов высокого давления в топливных баках, продувки магистралей
окислителя и горючего, полостей камеры сгорания [1, 9, 24, 34, 44]. Газовые
регуляторы подразделяются на прямого и не прямого действия, с
уравновешенным и неуравновешенным клапаном, прямого и обратного хода.
В ЖРДУ в основном применяются неуравновешенные газовые регуляторы
прямого действия прямого и обратного хода. В них привод исполнительного
элемента – клапана осуществляется за счет энергии основного потока газа,
т.е. без дополнительного источника энергии. В регуляторах прямого хода
53
открытие дросселирующего сечения (между седлом и клапаном) происходит
по потоку газа, а в регуляторах обратного хода, наоборот, против потока газа.
В регуляторе давления любой конструкции сущность процесса одна и
та же: регулирующий орган (клапан) изменяет площадь щели, при
прохождении через которую давление газа падает - газ дросселируется.
Характер истечения газа зависит от отношения давления за клапаном к
давлению перед ним.
Принцип действия регулятора можно рассмотреть на примере
простейшей схемы, представленной на рис. 2.3.1.
Сжатый газ дросселируется в щели между
клапаном 1 и неподвижным седлом 2. Далее газ
попадает в камеру низкого давления и через
выходной патрубок направляется к потребителю.
Значение
Рис. 2.3.1 – Принципиальная
схема регулятора давления
выходного
давления
регулируется
винтом 5, то есть усилием регулировочной
пружины 4.
Газ в камере Н воздействует на мембрану 3. Если усилие от давления в
камере Н превысит силу пружины 4, то мембрана 3 прогнется в сторону
пружины и клапан 1 под действием давления на входе и силы
вспомогательной пружины 7 приблизится к седлу; площадь дросселирующей
щели уменьшится и давление в камере Н снизится до заданного. При
уменьшении выходного давления ниже обусловленного регулировкой
пружины 4 мембрана переместится в другую сторону и толкатель 6
приподнимает клапан 1, увеличивая площадь дросселирующей щели. Таким
образом, в рассматриваемом регуляторе чувствительный элемент - мембрана
3 связан с регулирующим органом- клапаном 1 через исполнительный
механизм- толкатель 6.
В регуляторе предусматривается фильтр, служащий для очистки газа
54
перед поступлением его к потребителю, предохранительный клапан,
ограничивающий рост давления за регулятором (возникает при неправильной
эксплуатации или поломке регулятора); расходное устройство (жиклер или
система жиклеров), создающее небольшую утечку газа в окружающую
атмосферу.
Регуляторы давления можно классифицировать следующим образом.
По уравновешенности клапана: регуляторы уравновешенного и
неуравновешенного типа.
По направлению движения регулирующего органа – клапана:
регуляторы прямого и обратного хода.
По виду задающего устройства: пружинные; пневмоуправляемые;
грузовые.
По числу последовательных ступеней дросселирования:
одноступенчатые; двухступенчатые.
По конструкции чувствительного элемента: мембранные; поршневые.
Регуляторы уравновешенного типа - это регуляторы, у которых
изменение входного давления газа в принципе не создает непосредственного
изменения сил, действующих на регулирующий орган. Равнодействующая от
давления газа на входе равна нулю.
В регуляторе уравновешенного типа (рис. 2.3.2)
уравновешивание достигается благодаря тому,
что
средний
диаметр
сильфона
4
равен
диаметру седла 6. Практически из условия
обеспечения
устойчивости
регулятора
и
вследствие возникновения аэродинамических
сил при обтекании потоком газа регулирующего
органа 5, а также из-за наличия допусков на
Рис. 2.3.2 – Принципиальная
схема регулятора давления газа изготовление деталей полное уравновешивание
уравновешанного типа
никогда не обеспечивается.
Кроме этого, и теоретически снижение давления на входе, приводящее
55
к перемещению регулирующего органа 5 для увеличения дросселирующей
щели, ведет к изменению усилия задающего устройства - регулировочной
пружины 2, к изменению упругости сильфонов 1 и 4 и вспомогательной
пружины 3. Это обусловливает изменение выходного давления.
В
большинстве
конструкций
регуляторов,
уравновешенных
по
входному давлению, стремятся к уравновешиванию регулирующего органа и
по выходному давлению. В регуляторе, представленном на рис. 2.3.2 это
достигается
тем,
что
давление
газа
после
дросселирующей
щели,
воздействующее на чувствительный элемент - сильфон 1, благодаря наличию
полого штока 7 действует и внутри сильфона 4. Таким образом, силы от
входного и выходного давления, действующие на регулирующий орган 5,
уравновешены.
В регуляторах неуравновешенного типа (рис. 2.3.3) изменение давления
газа на входе непосредственно вызывает соответствующее изменение сил,
действующих на регулирующий орган (равнодействующая от входного
давления не равна нулю).
Рис. 2.3.3 – Принципиальные схемы регуляторов давления неуравновешанного типа
На рис. 2.3.3,а. дана схема регулятора обратного хода. У регулятора
прямого хода (рис. 2.3.3,б) перемещение регулирующего органа 1 для
увеличения дросселирующей щели происходит по направлению потока газа.
Чувствительным элементом у регуляторов, приведенных на рис. 2.3.3,б,в,г
является
мембрана. Пневмоуправляемыми называются регуляторы, у
которых задающее усилие, действующее на чувствительный элемент,
создается командным давлением. Задающим устройством для таких
56
регуляторов обычно служит другой малогабаритный регулятор.
Имеются регуляторы с комбинированным управлением, у которых на
чувствительный элемент воздействует как командное давление, так и
регулировочная
пружина
комбинированным
обеспечения
2
(см.
управлением
заданного
рис.
усилие
выходного
2.3.3,г).
В
пружины,
давления,
регуляторах
необходимое
уменьшается
с
для
благодаря
воздействию управляющего газа. Иногда пневмоуправляемый регулятор
конструктивно объединен в едином агрегате с командным регулятором:
входное давление от общего источника подводится к пневмоуправляемому и
командному регуляторам. Такие регуляторы часто называют агрегатными.
Двухступенчатыми (рис. 2.3.4) называются регуляторы, в которых
снижение
давления
происходит
последовательно
в
двух
ступенях
дросселирования.
В первой ступени
входное давление
снижается до промежуточного значения, а
затем, во второй ступени
это давление
снижается до заданного значения. Обе
ступени регулятора можно компоновать как
Рис. 2.3.4 – Принципиальная схема в одном, общем, корпусе, так и в разных
двухступенчатого
регулятора
корпусах, соединяемых трубопроводом
давления газа
В
некоторых
конструкциях
двухступенчатых
регуляторов
предусмотрено использование газа и после первой ступени.
У
всех
регуляторов,
схемы
которых
приведены
ранее,
связь
регулирующего органа с чувствительным элементом непосредственная. При
такой связи перемещение чувствительного элемента равно перемещению
регулирующего органа. В более сложных механических (рычажных,
винтовых, зубчатых, клиновых) или гидравлических исполнительных
механизмах
перемещение
чувствительного
элемента
вызывает
соответствующее (но не равное) перемещение регулирующего органа.
57
Приведенную
классификацию
нельзя
считать
всеохватывающей.
Существует множество других оригинальных конструкций. Однако, как
правило, регуляторы, используемые в современной технике, "укладываются"
в рамки приведенной классификации.
2.4 Выбор схемы регулятора давления газа
с учетом его конструктивных и технологических особенностей
При выборе схемы вновь проектируемого регулятора для конкретных
условий эксплуатации следует учитывать следующее [44].
Неуравновешенные плунжерные регуляторы не могут обеспечивать
высокую
точность
используют там,
поддержания
заданного
выходного
давления.
Их
где к точности не предъявляются жесткие требования.
Однако из-за простоты и надежности конструкций такие регуляторы
получили широкое распространение.
Мембранные регуляторы применяют при более низких значениях
давления, чем поршневые. Сильфонные регуляторы неуравновешенного типа
используются редко, обычно при работе на агрессивных средах, а также при
очень низких или очень высоких температурах. Подобные регуляторы
используются при работе на малых расходах.
Регуляторы обратного хода неуравновешенного типа, особенно при
высоком входном давлении, имеют преимущества перед регуляторами
прямого хода в обеспечении герметичности затвора при прекращении расхода
газа, в характеристиках при работе на больших расходах газа, в простоте
устройства.
Пневмоуправляемые
регуляторы
применяют
при
работе
со
значительным расходом газа при высоком выходном давлении. В таких
регуляторах нет мощных пружин, поэтому они имеют меньшую массу и
малые габариты, по сравнению с пружинными регуляторами. При прочих
равных
условиях
пневмоуправляемые
регуляторы
имеют
лучшие
характеристики, чем пружинные.
58
Регуляторы уравновешенного типа - пружинные и пневмоуправляемые
- применяют при работе с высоким и средним расходом газа, обеспечивая
лучшие характеристики при меньших размерах, чем при использовании
регуляторов неуравновешенного типа.
Пневмоуправляемые
уравновешенные
регуляторы
позволяют
обеспечивать требуемые характеристики при более высоких расходах, чем
пружинные. Но конструкция регуляторов уравновешенного типа более
сложна, чем конструкция регуляторов неуравновешенного типа, и у них более
вероятно возникновение неустойчивой работы.
Двухступенчатые регуляторы применяют при большом перепаде между
входным и выходным давлениями. Они обеспечивают высокую точность
поддержания выходного давления, так как вторая ступень регулятора
работает в благоприятных условиях (входное давление второй ступени
изменяется незначительно). Масса двухступенчатого регулятора в ряде
случаев оказывается меньше, чем у регуляторов других схем.
Плунжерные ррегуляторы применяют при больших расходах воздуха.
При высоких давлениях настройки (регуляторы подачи) применяют чисто
плунжерные схемы, а при низких давлениях (регуляторы наддува) - схемы с
сильфоном. Корпус регулятора изготавливается из нержавеющей стали 2Х13
и закаливается Rc 42...49. Посадочное отверстие под плунжер шлифуется и
притирается.
Уплотнение
зазора
из
полости
высокого
давления
осуществляется подачей смазки под давлением, превышающим высокое
давление.
Все эти факторы обеспечивают плавное движение
плунжера.
Столь тщательное выполнение подвижной пары позволяет использовать
плунжер в качестве чувствительного элемента (без дополнительного
сильфона или мембраны) в регуляторах подачи. Чувствительность плунжера
падает с уменьшением диаметра и поэтому едва ли возможно применение
этой схемы при диаметре, меньшем 14 мм. И, конечно, невозможно
применение каких-либо уплотняющих манжет на плунжере, так как это
недопустимо снижает его чувствительность.
59
При больших расходах реактивная сила потока, действующая на
клапан, имеет существенную величину. Поэтому форма и размеры клапана,
влияющие как на характеристику регулятора, так и на его виброустойчивость,
являются предметом опытной отработки. Выбранные размеры клапана
должны выдерживаться достаточно точно, так как даже незначительные
отклонения могут заметно отразиться на характеристике регулятора.
В плунжерных регуляторах основные пружины должны обязательно
ставиться в шарнирных центрах, устраняющих боковые силы.
Мембранные регуляторы применяются при небольших расходах
воздуха.
При
затруднительным
начальном
давлении
компенсировать
25,0...30,0
неуравновешенную
МПа
силу
становится
высокого
давления при диаметре седла большем 4...5 мм. Сопряжение клапан направляющая втулка выполняется также очень тщательно в связи с
демпфирующим действием этого сопряжения. В качестве чувствительных
элементов часто применяю сильфон и мембрану. Сильфон, безусловно,
является чувствительным элементом более высокого класса и обеспечивает
очень высокую стабильность характеристик регулятора. Но конструкция
сильфонного узла более сложна и имеет большие габариты, чем конструкция
мембранного узла. Поэтому находят широкое применение и мембраны,
изготовленные из нагартованной нержавеющей стальной ленты 1Х18Н9.
К мембране точками приваривается тарель, на которой базируется
пружина. Гофры выдавливаются гидравлическим давлением 10...15 МПа,
причем в этот момент края мембраны и ее средняя часть, опирающаяся на
тарель, располагаются в одной плоскости. Нормальная работа мембраны
может быть только при небольших прогибах в ту и другую сторону
относительно этой нейтральной плоскости. Большие прогибы вызывают
остаточную деформацию мембраны, что приводит к нестабильности
характеристик регулятора. Поэтому в конструкции должны быть упоры,
ограничивающие прогиб мембраны в обе стороны. Длина иглы, связывающей
мембрану с клапаном, подгоняется по месту так, чтобы при закрытом клапане
60
мембрана имела некоторый прогиб в сторону пружины. Эффективная
площадь
мембраны
подсчитывается
по
среднему
диаметру
гофра.
Характеристика мембраны как упругого элемента нелинейна. Однако для
расчета
характеристики
регулятора
вполне
допустимо
принимать
характеристику мембраны вблизи нейтральной плоскости линейной, т.е. с
постоянной жесткостью.
В случае применения металлической мембраны возможна установка
пружины без шарнирных центров,так как возникающая при этом боковая
сила будет воспринята мембраной и не вызовет сил трения.
Рассмотрим конструкции некоторых регуляторов давления газа,
нашедших применение как в авиакосмической технике, так и в других
отраслях машиностроения. Так на рис. 2.4..1 изображен регулятор с двумя
предохранительными клапанами, размещенными в магистралях высокого и
рабочего давлений.
Рис. 2.4.1 – Конструктивная схема с двумя предохранительными клапанами: 1-стакан;
2,16,22,32,33 - пружины; 3,14,24,35 - контргайки; 4,10,15,34 - втулки резьбовые; 5 - тарель;
6 - сильфон; 7 - пружина; 8 - корпус; 9 - седло; 10 - втулка резьбовая; 11 - фильтр; 12 клапан; 13 - винт регулировочный;17 - сильфон; 18 - седло; 19 - толкатель; 20,21 - кольца
уплотнительные; 23 - клапан; 25 - втулка; 26 - штуцер; 27 - фильтр; 28 - подшипник; 29 втулка направляющая; 30 - клапан; 31 - сильфон; 36 - стакан
Регулятор служит для понижения давления газа в системе наддува бака,
61
поддержания этого давления постоянным на выходе из регулятора, а также
для предохранения системы от повышения давления при зарядке бортового
баллона. Регулятор обеспечивает давление на выходе от 0,6 до 1,2 МПа при
изменении входного давления от 0,7 до 15 МПа. Давление открытия
предохранительного клапана высокого давления 17 МПа. Давление открытия
предохранительного клапана низкого давления 1,4 МПа.
На рис. 2.4.2 представлен еще один вариант конструктивного
исполнения неуравновешенного регулятора. Данный регулятор не имеет
предохранительных клапанов.
На рис. 2.4.3 приведена конструкция двухступенчатого регулятора
давления газа. При давлении на входе 15 МПа он обеспечивает давление на
выходе 0,3(+0,1) МПа. Конструкции элементов подвижных частей первой и
второй ступеней идентичны, что обеспечивает хорошую взаимозаменяемость
деталей и удобство обслуживания агрегата.
Рис. 2.4.2 – конструктивная схема регулятора давления газа: 1 - направляющая втулка; 2 клапан; 3 - корпус; 4 - седло; 5 - игла; 6 - сильфон; 7 - пружина; 8 - стакан; 9 регулировочный винт; 10 - фильтр
На рис. 2.4.4 представлена конструкция регулятора, у которого
предохранительный
клапан
размещен
во
внутренней
полости
чувствительного элемента (сильфона). Регулятор обеспечивает давление на
выходе 2,5+0,4 МПа при изменении входного давления от 5,0 до 15,0 МПа.
Давление открытия предохранительного клапана составляет 15,5 МПа.
В качестве рабочих сред могут использоваться воздух или азот.
62
Рис. 2.4.3 – Конструктивная схема двухступенчатого регулятора давления газа: 1 - штуцер
входной; 2 - фильтр; 3 - пружина клапана; 4 - клапан ступени 1; 5 - игла дроссельная; 6 проставка ступени 1; 7 - седло ступени 1; 8 - втулка; 9 - пружина регулировочная; 10 тарель сильфона; 11 - сильфон ступени 1; 12 - обойма прижимная; 13 - винт настроечный;
14 - винт-гайка; 15 - пружина клапана;16 - клапан ступени 2; 17 - игла дроссельная; 18 проставка ступени 2; 19 - седло ступени 2; 20 - втулка ступени 2; 21 - корпус регулятора;
22 - опора пружины ступени 1; 23 - уплотнения; 24 - опора пружины ступени 2; 25 пружина настроечная ступени 2; 26 - сильфон ступени 2; 27 - обойма прижимная ступени
2; 28 - стопорное кольцо; 29 - тарель сильфона ступени 2; 30 - штуцер; 31 - настроечный
винт ступени 2; 32 - гайки крепежные
Рис. 2.4.4 –Регулятор давления газа с предохранительным клапаном: 1 - корпус
регулятора; 2 - стакан настроечной пружины; 3 - седло; 4 - предохранительный клапан; 5 входной штуцер; 6 - основной клапан; 7 - уплотнение; 8 – втулка предохранительного
клапана; 9 – винт pегулировочный; 10 - гайка; 11 - контргайка; 12 - крышка корпуса; 13 упор предохранительного клапана; 14 - упор настроечной пружины; 15 - винт крепежный;
16 - пружина настроечная;17 - пружина вспомогательная; 18 - пружина
предохранительного клапана; 19 - винт контровочный; 20 - регулировочная втулка; 21 уплотнение; 22 - сильфон; 23 – кольцо
На рис. 2.4.5 представлена конструктивная схема газового регулятора
давления прямого действия, неуравновешенного типа, обратного хода.
63
Корпус предохранительного клапана и его седло размещены во внутренней
полости сильфона 3. Сильфон 3 наружным кольцом 6 жестко соединен с
корпусом 1 регулятора при помощи крышки 2, внутри которой размещен
винт настройки 4 регулятора и регулировочный винт 5 предохранительного
клапана 7. Толкатель 9 жестко связан одним концом с сильфоном 3, другимс
клапаном
11
регулятора,
что
обеспечивает
изменение
площади
дросселирующей щели (образованной парой “седло-клапан”) при изменении
выходного давления, действующего на сильфон 3. Винт настройки 4
регулятора
выполнен
в
виде
втулки,
внутри
которой
размещен
регулировочный винт 5 предохранительного клапана 7. В случае повышения
редуцируемого давления в полости Б выше максимально допустимого
регулировочный винт 5 упирается в предохранительный клапан, сообщая
полость Б низкого давления с атмосферой.
Рис. 2.4.5 - Конструкция неуравновешанного регулятора прямого действия обратного
хода: 1-корпус; 2- крышка; 3-сильфон; 4-винт настройки; 5-регулировочный винт
предохранительного клапана; 6- наружное кольцо сильфона; 7-предохранительный
клапан; 8- пружина предохранительного клапана; 9- толкатель; 10- седло клапана; 11клапан; 12- основная пружина; 13- вспомогательная пружина; 14- уплотнительный
элемент
2.5 Выбор параметров и расчет статических характеристик
регулятора давления газа
Статические и динамические характеристики регулятора давления газа
рассчитывается на основе уравнения равновесия сил и уравнения для расхода
газа. Рассмотрим вывод этих уравнений на примере неуравновешенного
регулятора обратного хода, схема которого приведена на рис.2.5.1
64
Рис. 2.5.1 – Расчетная схема
неуравновешенного газового регулятора
давления прямого действия обратного хода:
1 – корпус; 2 –клапан; 3 – сильфон; 4 –
основная пружина; 5 – привод настройки
давления на выходе из регулятора; 6 –
привод настройки предохранительного
клапана; 7 – отверстие в корпусе для
соединения полости внутри сильфона с
атмосферой; 8 – шток предохранительного
клапана; 9 – предохранительный клапан; 10
– пружина предохранительного клапана; 11
–
дроссельное
отверстие
(демпфер)
регулятора; 12 – вспомогательная пружина
Устройство и принцип действия изучаемого регулятора давления газа
было рассмотрено в разд. 2.4 учебного пособия.
Рассмотрим обобщенную математическую модель газового регулятора
из которой можно получить статическую и динамическую характеристики.
Для упрощения модели приняты некоторые допущения: течение газа
через сечение клапан-седло сверхкритическое; коэффициенты расхода в
дросселирующих элементах квазистационарные; газ идеальный; течение газа
через демпфер (узкий канал) ламинарное; в узлах трения наблюдаются как
силы вязкого трения, так и сухого трения; действие предохранительного
клапана не учитывается.
Уравнение баланса сил с учетом принятых допущений запишется в виде:
P1 f + P2/ F − P2 f − PН F + N вс.пр − N пр − N сф − Nин − N тр = 0
(2.5.1)
Усилия основной N пр и вспомогательной N вс.пр пружин, а также со стороны
сильфона определяется по формулам:
N пр = ( N пр )0 + γ пр ( x + αϕпр );
N вс.пр = ( N вс.пр )0 − γ вс.пр x;
(2.5.2)
N сф = ( N сф )0 + γ сф x;
где x - величина подъема редуцирующего клапана; ( N пр )0 , ( N вс.пр )0 , ( N сф )0
-
усилия
сжатия
основной
и
вспомогательной
пружин,
сильфона,
65
соответствующие максимальному подъему клапана ( x = 0 ); γ пр , γ вс.пр , γ сф жесткости основной и вспомогательной пружин, сильфона; ϕ пр – угол
вращения привода; α – коэффициент передачи угла привода в перемещение;
P1 , P2 , P2/ , PН , - соответственно давления на входе и выходе из регулятора, в
полости снаружи сильфона, атмосферное давление; F , f , - соответственно
эффективная площади торца сильфона и седла клапана.
Силу инерции подвижных элементов регулятора рассчитывают по
формуле
N ин = M пр
d2x
dt 2
(2.5.3)
где M пр – приведенная к клапану масса всех подвижных элементов, включая
третью часть массы пружин.
Силу
трения
подвижных
элементов
клапана
определяют
по
зависимости:
N тр = N с.тр sign(dx / dt ) + λтр (dx / dt ) ,
(2.5.4)
где N с.тр – сила сухого трения; λтр - коэффициент вязкого трения в
трущихся элементах клапана.
После подстановки выражений для сил (2.5.2)…(2.5.3) в зависимость
(2.5.1) получим
d2x
dx
dx
M пр 2 + λтр
+ ( γ пр + γ сф + γ вс.пр ) x + N с.тр sign =
dt
dt
dt
= fP1 − fP2 + FP2/ − FPН − αγ прϕ пр − ( N пр )0 − ( N сф )0 + ( N вс.пр )0
(2.5.5)
Выразим давление P2/ через другие параметры регулятора. Для этого
используем уравнение баланса расхода газа через демпфирующий дроссель
m& д и расход обусловленный деформацией сильфона m& x
m& д = m& x + m& V ,
(2.5.6)
где
66
Vсф dP2/
dx
1
/
m& д = ( P2 − P2 ) ; m& x = ρ F ; m& V = 2
,
Rд
dt
а dt
(2.5.7)
Rд – газовое сопротивление дросселя; ρ – плотность газа при давлении P2 ;
Vсф - объем полости снаружи сильфона; а - скорость звука в газе.
Из совместного решения уравнений (2.5.6) и (2.5.7) относительно P2/
получим:
dP2/
dx
Tсф
+ P2/ = P2 − Rд ρ F ,
dt
dt
где Tсф = RдVсф / a 2 - постоянная времени сильфона как апериодического
типового звена. Если принять во внимание малость объема полости снаружи
сильфона, то можно принять Tсф ≈ 0 , тогда последнее выражение примет
вид:
P2/ = P2 − Rд ρ F
dx
dt
(2.5.8)
Подставив выражение (2.5.8) в (2.5.5), получим
d2x
dx
dx
M пр 2 + (λтр + Rд ρ F 2 ) + ( γ пр + γ сф + γ вс.пр ) x + N с.тр sign =
dt
dt
dt
= fP1 − fP2 + FP2 − FPН − αγ прϕпр − ( N пр )0 − ( N сф )0 + ( N вс.пр )0
(2.5.9)
Чтобы замкнуть уравнение (2.5.9), необходимо выразить перемещение
&г:
клапана x через расход газа m
m& 1 = Fдр
где
А
Р1 ,
T1
A = 2k /(k − 1) ( P2 / P1 ) 2 / k − ( P2 / P1 )( k −1) / k ;
(2.5.10)
Fдр
-
площадь
дросселирующего сечения щели; k - показатель адиабаты; R - газовая
постоянная; g - ускорение свободного падения.
При перепадах P1 / P2 > ( P1 / P2 ) кр , соответствующих сверхкритическому
режиму истечения, величина A = Aкр = const . Для воздуха, в этом случае,
67
A = 0,396 , а условие сверхкритического перепада - ( P1 / P2 ) > 1,89 .
Формула для определения площади дросселирующей щели зависит от
типа применяемого клапана (рис. 2.5.2).
При плоском клапане
Fдр = π d c ( xmax − x) ,
(2.5.11)
где d c диаметр отверстия седла. При
коническом
клапане
площадь
щели
определяется по зависимости
Fдр = π d c sin θ − π ( xmax − x) 2 sin θ cos θ ,
Рис. 2.5.2 – Схемы посадочных мест
клапана регулятора
(2.5.12)
где θ - половина угла при вершине конуса
клапана регулятора.
Преобразуя
ξ=
формулу
(2.5.12),
получим
Fдр = π d c sin θ (1 − ξ ) ,
где
( xmax − x)sin θ cos θ
. Пренебрегая изменением ξ с изменением x и
dc
принимая ε = 1 − ξ можно записать Fдр = επ d c h sin θ . Подставив полученные
соотношения в уравнение (2.5.10) и решив его относительно подъема
клапана, получим
x = xmax −
T1 m& 1
⋅ ,
π d c А P1
(2.5.13)
Уравнения (2.5.9) и (2.5.13) полностью определяют статические и
динамические характеристики регулятора.
Известно, что для установившихся режимов можно не учитывать
инерционную силу ( N ин = 0 ) , силу трения ( N тр = 0 ) и изменение давления в
полости снаружи сильфона (при Rд = 0 справедливо равенство P2/ = P2 ).
Тогда с учетом последних замечаний можно решив совместно уравнения
(2.5.90 и (2.5.13)иполучив зависимость для построения статических
характерисик регулятора давления газа
68
P2 =
где
( N пр )0 + ( N сф )0 − ( N вс.пр )0 + PF
+ γ ∑ xmax
1
F− f
−
γ ∑ m& 1 RT1
P1 f
−
,(2.5.14)
F − f ( F − f )π d c P1 A
γ Σ = γ пр + γ сф + γ вс.пр .
Первая
составляющая
правой
части
уравнения
(2.5.14)
имеет
наибольшее влияние на значение выходного давления P2 . Величина P2
определяется настройкой регулятора (предварительной затяжкой пружин и
сильфона) и не зависит от давления P1 . Вторая и третья составляющие в
первом приближении не зависят от настройки регулятора. При снижении
входного давления P1 вторая составляющая уменьшается, что способствует
возрастанию P2 у регулятора обратного хода.
В отличие от первых двух, третья составляющая зависит от расхода газа.
Ее значение с уменьшением P1 всегда нелинейно возрастает.
На практике наибольший интерес представляет не сама величина
редуцируемого давления P2 , определяемая, в основном, величиной сжатия
главной пружины N пр , а изменение редуцируемого давления ΔP2 при
уменьшении входного давления от P1max до P1min .
Чтобы определить величину ΔP2 , запишем выражение (2.5.11) для P2 ' ,
соответствующего работе при P1max , и P2 '' , соответствующего работе при
P1min , и вычтем первое выражение из второго.
Тогда получим:
P2 = P2 ''− P2 ' =
RT1 '' ⎞
γ ∑G1 ⎛ RT1 '
( P1max − P1min ) f
−
−
⎜⎜
⎟.
F− f
( F − f )π d c ⎝ P1max A ' P1min A '' ⎟⎠
(2.5.15).
Уравнение (2.5.15) можно преобразовать к более простому виду,
объединив жесткости и выразив Δx - ход клапана:
ΔP2 =
( P1max − P1min ) f γ Σ Δx
−
F− f
F− f
.
(2.5.16)
В случае безрасходного режима работы регулятора выражение для
69
расчета статических характеристик принимает вид
ΔP2 =
( P1max − P1min ) f
F− f
(2.5.17)
.
Как видно из равенства (2.5.17), регулятор неуравновешенного типа
обратного хода в безрасходном режиме имеет возрастающую характеристику,
т.е. P2 растет с уменьшением P1 . Зависимость P2 = ϕ ( P1 ) приведена на
рисунке 2.5.4.а. При наличии расхода, в зависимости от его величины,
статическая характеристика может быть как возрастающей, так и падающей.
Падающая характеристика получается при больших значениях расхода газа.
Уравнения статической характеристики для регуляторов прямого хода
аналогичны вышеприведенным, за исключением знаков математического
действия. Так, уравнение (2.5.10) для регулятора прямого хода можно
переписать в виде:
P2 =
( N пр )0 + ( N сф )0 − ( N вс.пр )0 + P1 F + γ ∑ xmax
F+ f
−
γ ∑ G1 RT1
P1 f
.
−
F + f ( F + f )π d c P1 A
Зависимость P2 = ϕ ( P1 ) для регуляторов прямого хода приведена на
рис. 2.5.3.б [44].
Рис. 2.5.3 Нагрузочные
характеристики регуляторов
обратного (а) и прямого (б)
хода
При одинаковых геометрических размерах и равных расходах газа
характеристика у регулятора прямого хода всегда будет более круто
падающей, чем у регулятора обратного хода. Изменение входного давления у
регуляторов прямого хода оказывает на статическую характеристику влияние,
отличное от регуляторов обратного хода. Это объясняется тем, что с
понижением входного давления у регуляторов прямого хода уменьшается
сила, направленная на открытие клапана, в то время как у регуляторов
70
обратного хода уменьшается сила, прикрывающая клапан. Регуляторы
прямого хода как на расходном, так и безрасходном режимах имеют
падающую характеристику.
Под расходными характеристиками понимается серия характеристик,
полученных при разных расходах, но при неизменной затяжке основной
пружины (рис. 2.5.4).
Рис. 2.5.4 – Расходные
характеристики регуляторов
давления газа
Расходные характеристики необходимы как для оценки возможностей
регулятора при тех или иных расходах, так и для оценки поведения
регулятора в случае работы на переменном расходе. Качественное изменение
характеристик у всех регуляторов одинаково: с увеличением расхода воздуха
давление за регулятором падает.
Температурные характеристики - это серия характеристик, полученных
при разной температуре, но при неизменной затяжке основной пружины
(рис.2.5.5). Расслоение характеристик регулятора по температуре объясняется
несколькими причинами.
Во-первых, изменение температуры приводит
к изменению модуля
сдвига упругих элементов. Главным является, естественно, изменение силы
основной пружины. Модуль сдвига сталей изменяется примерно на 0,025%
при изменении температуры на 10 C
(в интересующей нас области
температур от −600 C до +500 C ): при понижении температуры модуль
увеличивается, а при повышении температуры - уменьшается.
71
Рис.2.5.5
–
характеристики
давления газа
Температурные
регуляторов
Если пренебречь изменением величины сжатия, которое происходит
вследствие изменения линейных размеров от температуры, то сила пружины
будет изменяться пропорционально модулю сдвига, т.е. примерно на 2,5%
при изменении температуры на 1000 C . Это изменение является главным
фактором,
через
который
проявляется
влияние
температуры
на
характеристику мембранных регуляторов. При изменении температуры в
диапазоне от −400 C до +500 C давление у мембранных регуляторов может
изменяться
на
(3…3,5)
%,
причем
изменение
давления
примерно
пропорционально температуре.
Во-вторых, с изменением температуры меняется вязкость смазки. В
мембранных регуляторах роль смазки незначительна, так как очень малы
поверхности, подлежащие смазке. В плунжерных регуляторах наоборот
имеется значительная поверхность скольжения (пара плунжер - корпус),
смазанная консистентной смазкой. Морозостойкая смазка ЦИАТИМ-221 хотя
и имеет более пологую кривую вязкости, чем у других смазок, но, все же,
изменение ее вязкости сказывается на характеристике регулятора. Силы
вязкого трения зависят также от величины зазора, от скорости перемещения
плунжера.
Таким
образом,
температурные
характеристики
плунжерных
регуляторов определяются воздействием двух противоположных факторов:
изменением силы пружины и изменением сил вязкого трения. Суммарное их
воздействие не может быть определено расчетом.
Согласно уравнению (2.5.9) начальная температура воздуха сказывается
на величине x и через нее на характеристике регулятора. Однако это влияние
72
незначительно и им можно пренебречь.
Конструктивные параметры регулятора рассчитывают исходя из
& г .max , давлений P1max , P1min , P1нoм , ΔP2 ,
заданных значений расхода газа m
температуры газа T1 .
Расчет производят в следующей последовательности.
1. Исходя из обеспечения максимального расхода
m& г .max
при
минимальном входном давлении P1min , определяют диаметр седла d c и
максимальный ход клапана xmax =
dc
m& г .max RT1
. Зачастую параметры xmax и
επ d c sin θ P1 A
связывают через постоянную:
определяется
схемой
регулятора.
e=
1 xmax
, величина которой
ε sin θ d c
У
пружинных
неуравновешенных
e =0,05...0,2, у пневмоуправляемых - e =0,15... 0,2.
& г ≤10 г/с) диаметр седла выбирают
Для малорасходных регуляторов ( m
из конструктивных соображений, но не более 2,7...5 мм.
2. Затем проверяют эффективную площадь чувствительного элемента
F , оказывающую значительное влияние
на статические характеристики
регулятора. В простейшем случае необходимую величину F подсчитывают
по
заданному
значению
ΔP2 .
Известно,
что
для
регуляторов
& г = 0 справедливо равенство
неуравновешенного типа при m
ΔP2 =
f ΔP1
,
F± f
откуда n =
ΔP2
ΔP1 ± ΔP2
или n =
ΔP2
, где n = f / F .
ΔP1
Определив заранее f , находят и F . Анализ выполненных конструкций
показывает, что для регуляторов неуравновешенного типа n =0,005...0,2, а для
уравновешенных n =0,1...0,2.
Размеры деталей чувствительных элементов определяются по-разному,
в зависимости от их типа. Так, диаметр поршней, уплотняемый манжетами
или кольцами, подсчитывают исходя из выбранной площади F . Этот диаметр
73
уточняют по стандартизированным размерам манжет или уплотнительных
колец.
3. Средний диаметр сильфона
Dср = ( D1 + D2 ) с достаточной для
практики точностью подсчитывают так Dср = 4 F / π , где D1 и D2 наружный и внутренний диаметры сильфона.
Площадь
резиновых
мембран,
принимая
их
гибкими
и
не
воспринимающими усилий изгиба, подсчитывают по формуле:
π Dн 2 ⎛
2
Dв ⎛ Dв ⎞ ⎞
⎜1 +
F=
+⎜
⎟ ⎟,
12 ⎜ Dн ⎝ Dн ⎠ ⎟
⎝
⎠
где Dн , Dв - наружный и внутренний диаметры мембраны.
4. Затем определяют требуемое усилие затяжки регулировочной
пружины
N пр = k зап P2 F ,
где k зап - коэффициент запаса, равный 1,05...1,25. Исходя из значений N пр ,
условий
размещения
пружины
и
характера
требуемой
статической
характеристики, назначают жесткость пружины γ пр .
Затем из уравнения баланса сил находят силу затяжки ( N пр )0 ,
жесткость γ пр и размеры вспомогательной пружины.
Возможен и другой путь, при котором вначале назначают параметры
вспомогательной пружины, а затем из уравнения баланса сил определяют
усилие затяжки основной (регулировочной) пружины. При этом значение
давления на входе в регулятор для подстановки в уравнение баланса,
принимается равным: P1 =
1
( P1max + P1min ) .
2
При использовании в качестве чувствительного элемента сильфона,
параметры
регулировочной
пружины,
как
правило,
рассчитываются
совместно с сильфоном. Усилие регулировочной пружины при этом
значительно превосходит усилие сильфона.
74
2.6 Расчет динамических характеристик регулятора давления газа
Устройство и принцип действия изучаемого регулятора давления газа
было рассмотрено в разд. 2.4, а расчет статических характеристик регулятора
представлен в разд 2.5 учебного пособия.
Исследование динамических характеристик регулятора может быть
выполнено при задании определенных граничных условиях со стороны входа
и выхода. Если на входе в регулятор реализуется сверхкритический режим
истечения газа (через дросселирующую щель), то этим и определяется то, что
расход газа зависит только от давления на входе и площади проходного
& 2 определяется на
сечения щели. Расход газа на выходе из регулятора m
основе уравнения баланса расхода газа
m& 2 = m& 1 − m& д
(2.6.1)
где с учетом Vсф ≈ 0 расход через дроссель определится так
m& д = ρ F
dx
dt
(2.6.2)
Для исследования динамических характеристик регулятора, как
правило, используется математическая модель в малых отклонениях. Для
получения такой модели выразим равенства (2.5.9), (2.5.13), (2.6.1) и (2.6.2) в
малых отклонениях:
d 2 ( x0 + Δx)
2 d ( x0 + Δx )
λ
ρ
M пр
R
F
+
+
+ γ ∑ ( x0 + Δx) +
(
)
тр
д
dt 2
dt
d ( x0 + Δx)
(2.6.3)
+ N с.тр sign
= f ( P1,0 + ΔP1 ) + ( F − f )( P2,0 + ΔP2 ) −
dt
− F ( PH ,0 + ΔPH ) − αγ пр (ϕпр ,0 + Δϕпр ) − ( N пр )0 − ( N сф )0 + ( N вс.пр )0 ;
m& 1,0 + Δm& 1 = ( xmax − x0 − Δx)
π dc А
m& 2,0 + Δm& 2 = m& 1,0 + Δm& 1 − m& д,0 − Δm& д ;
T1
( P1,0 + ΔP1 ) ;
(2.6.4)
(2.6.5)
75
m& д ,0 + Δm& д = ρ F
d Δx
,
dt
(2.6.6)
P1,0 , P2,0 , ϕпр ,0 , m& 1,0 , m& 2,0 , m& д ,0 - номинальные значения
где x0 ,
& 1 , Δm& 2 ,
соответствующих параметров регулятора; Δx , ΔP1 , ΔP2 , Δϕпр , Δm
Δm& д - приращения соответствующих параметров регулятора. С учетом
только переменных величин равенства (2.6.3)…(2.6.6) перепишутся в виде:
d 2 Δx
d Δx
2 d Δx
(
λ
ρ
)
γ
M пр
R
F
x
N
sign
+
+
+
Δ
+
=
тр
д
∑
с
тр
.
dt 2
dt
dt ,
= f ΔP1 + ( F − f ) ΔP2 − αγ пр Δϕпр − F ΔPH ;
Δm& 1 = ( xmax − x0 )
π dc А
T1
ΔP1 −
π dc А
T1
P1,0 Δx ;
(2.6.8)
Δm& 2 = Δm& 1 − Δm& д ;
Δm& д = ρ F
(2.6.7)
(2.6.9)
d Δx
.
dt
(2.6.10)
Для замыкания уравнений (2.6.7) и (2.6.10) запишем выражение для
граничного условия на выходе из регулятора, т.е. уравнение объекта
регулирования
m& 2 = f ( P2 , t ) .
(2.6.11)
Равенство (2.6.11) может быть конкретизировано для заданных условий,
например для емкости в малых отклонений оно имеет вид:
Δm& 2 =
V d ΔP2
,
а 2 dt
(2.6.12)
где V – объем полости (объекта регулирования) на выходе из регулятора; а
- скорость звука в газе.
Для
дальнейшего
анализа
представим
уравнения
системы
регулирования давления газа (2.6.7)…(2.6.10) и (2.6.12) в безразмерных
параметрах:
76
⎫
⎪
d δx
dδ x
2
;
Tр2
T
ς
δ
x
K
δ
P
K
δ
P
K
δ
P
K
δϕ
+
+
=
+
−
−
1
2
2
1
3
4
р р
H
пр ⎪
dt 2
dt
⎪
δ m& 1 = K 5δ Р1 − K 6δ х;
⎪
⎪
δ m& 2 = δ m& 1 − δ m& д ;
⎬ , (2.6.13)
⎪
dδ x
⎪
;
δ m& д = Tд
dt
⎪
⎪
d δ P2
,
δ m& 2 = Tор
⎪
dt
⎭
2
где δ x = Δx /( xmax − x0 ) ; δ P2 = ΔP2 / P2,0 ; δ P1 = ΔP1 / P1,0 ; δ PH = ΔPH / PH ,0 ;
δ m& 1 = Δm& 1 / m& 1,0 ; δ m& 2 = Δm& 2 / m& 1,0 ; δ m& д = Δm& д / m& 1,0 ; δϕпр = Δϕ пр / ϕпр ,0
-
соответственно относительные параметры регулятора;
Tр =
M пр
γ∑
- постоянная времени регулятора;
2
1 λтр + Rд ρ F
– коэффициент демпфирования регулятора;
ςр =
2
М прγ ∑
К1 =
К3 =
К5 =
( F − f ) P2 ;
γ ∑ ( xmax − x0 )
FPН ,0
γ ∑ ( xmax − x0 )
К2 =
; К4 =
π d с ( xmax − x0 ) АР1,0
Т1 m& г ,0
FСФ PВХ 0
;
γ ∑ ( xmax − x0 )
αγ прϕпр ,0
γ ∑ ( xmax − x0 )
; К6 =
;
– коэффициенты
π d с АР1,0 ( xmax − x0 )
Т1 m& г ,0
передачи;
Tд =
Tор =
ρ F ( xmax − x0 )
m& 1,0
постоянная времени сильфона;
V P2,0
– постоянная времени объекта регулирования.
а 2 m& г ,0
Систему уравнений (2.6.13) можно преобразовать и привести к
операторной форме
77
1
⎡⎣ K1δ P%2 + K 2δ P%1 − K 3δ P%H − K 4δϕпр ⎤⎦ ;⎪⎫
T s + 2Tрς р s + 1
⎪
⎬ , (2.6.14)
T
1
⎪
( K 5δ P%1 − K 6δ x% ) − д δ x% ,
δ P%2 =
⎪⎭
Tор s
Tор
δ x% =
2 2
р
где волнистая черточка над параметром указывает, что он учитывается в
изображениях по Лапласу. На основании уравнений (2.6.8) можно составить
структурную схему (рис. 2.6.1) и провести исследование устойчивости и
качество регулирования системы методами, изложенными в теории
автоматического регулирования [].
Рассмотренная
система
регулирования
давления
газа
была
представлена линеаризованными методом малых отклонений уравнениями.
Это было возможным при условии, что в САР нет существенно нелинейных
элементов. Однако если учесть, что сила сухого трения может иметь
значительную, сравнимую с силой от давления величину, то необходимо
учитывать эту силу. Так как зависимость для силы сухого трения имеет
существенно нелинейный характер, то в этом случае нельзя воспользоваться
для анализа динамических характеристик САР методом малых отклонений.
Рис. 2.6.1 – Структурная схема системы регулирования давления газа
Для этого случая в теории автоматического регулирования разработан
широко применяемый в инженерной практике метод гармонической
линеаризации.
78
Рассмотрим для общего случая сущность метода гармонической
линеаризации или гармонического баланса [1, 27, 33, 42]. Пусть САР имеет
существенно нелинейный элемент, описываемый зависимостью
xвых = F ( xвх ,
dxвх
)
dt
(2.6.9)
Представим характеристику нелинейного элемента (2.6.9) в гармонически
линеаризованной форме
xвых = q ( A, ω ) xвх +
q '( A, ω ) dxвх
,
dt
ω
(2.6.10)
где xвх = A sin ωt - входной сигнал;
1
q ( A, ω ) =
πA
2π
1
q '( A, ω ) =
πA
∫ F ( A sin, Aωcos)sinψ dψ ,
(2.6.11)
0
2π
∫ F ( A sinψ , Aωcosψ ) cosψ dψ
(2.6.12)
0
- коэффициенты гармонической линеаризации, ψ = ωt .
Методом гармонической линеаризации решаются задачи, связанные с
исследованием и определением параметров автоколебаний, проверкой
отсутствия
автоколебаний
в
системах,
определением
частотных
характеристик замкнутых нелинейных систем и т.д. На основе метода
гармонической линеаризации разработаны и применяются два способа
определения амплитуды и частоты автоколебаний: алгебраический и
частотный.
Выделив в явном виде линеаризованную характеристику нелинейного
элемента в структурной схеме замкнутой САР, можно представить ее в виде,
изображенной на рис. 2.6.2.
79
Рис. 2.6.2 – Структурная схема
нелинейной САР
Пусть операторное уравнение линейной части САР имеет вид:
Q( s ) x%1 = − R( s ) x%2 ,
(2.6.13)
где x%1 , x%2 - изображения по Лапласу входного и выходного сигналов.
Гармонически линеаризованное уравнение нелинейного элемента также
запишем в операторной форме:
q '( A, ω ) ⎤
⎡
x%2 = ⎢ q( A, ω ) +
s ⎥ x%1 .
ω
⎣
⎦
(2.6.14)
В частности, для однозначной нелинейной характеристики x2 = F ( x1 )
выражение (2.6.14) упрощается: x%2 = q ( A) x%1 .
На
основании
уравнений
(2.6.13)
и
(2.6.14)
можно
вывести
гармонически линеаризованное характеристическое уравнение замкнутой
нелинейной САР в виде
Q( s ) = R( s )(q ( A, ω ) +
Для
q '( A, ω )
отыскания
ω
s) = 0
периодического
(2.6.15)
решения
системы
в
виде
x = Aa sin ωa t выполним в уравнении (2.6.15) подстановку s = jω :
Q( jω ) + R ( jω ) [ q ( A, ω ) + jq '( A, ω ) ] = 0 ,
причем,
для
однозначной
нелинейной
характеристики
получаем
следующее уравнение:
Q( jω ) + R( jω )q( A) = 0 .
(2.6.16)
Выделим в выражении (2.6.16) вещественную и мнимую части:
80
X (ω , A) = Re[Q( jω )] + Re[ R ( jω )]q( A) = 0
(2.6.17)
Y (ω , A) = Im[Q( jω )] + Im[ R( jω )]q( A) = 0
(2.6.18)
Преобразовав уравнения (2.6.17), (2.6.18), получим:
q ( A) = −
Re[Q( jω )]
Re[ R ( jω )]
(2.819)
Im[Q( jω )]Re[ R( jω )] − Im[ R( jω )]Re[Q( jω )] = 0
(2.6.20)
Из решения уравнения (2.6.20) может быть определена частота
возможных автоколебаний ω = ωa , затем, подставив которую в зависимость
(2.819) определена амплитуда возможных автоколебаний A = Aa . Если
уравнение (2.6.20) не имеет решения, то в САР не будут наблюдаться
автоколебания, если есть положительное решение, то с использованием
формул
(2.819)
и
выражения
для
q( A, ω ) определяют
амплитуду
автоколебаний. Для проверки устойчивости полученного периодического
решения можно воспользоваться аналитическим критерием устойчивости,
имеющим вид:
(
∂X ∂Y
∂X ∂Y
)a ( )a − ( )a ( )a > 0 .
∂A ∂ω
∂ω ∂A
(2.6.21)
Индекс " a " при частных производных обозначает, что они берутся при
ω = ωa и A = Aa .
Если условие (2.6.18) выполняется, то в САР будут наблюдаться
автоколебания, в противном случае нет.
Для
рассмотренного
выше
регулятора
давления
газа
после
гармонической линеаризации зависимости для силы сухого трения
получим:
q ( Av ) = 4 Fс.mp /[π q ( Av )γ ∑ ]
- коэффициент гармонической линеаризации,
(2.6.22)
Av = Axω
- амплитуда
скорости колебаний клапана при его движении по гармоническому закону
x = Ax sin ωt . С учетом гармонически линеаризованной зависимости для
силы сухого трения (2.6.22) система уравнений (2.6.7) примет вид:
81
⎫
d 2δ x
dδ x
dδ x
T
+ 2Tрς р
+ q ( Av )
+ δ x =⎪
2
dt
dt
dt
⎪
= K1δ P2 + K 2δ P1 − K 3δ PH − K 4δϕпр ;
⎪
⎪
δ m& 1 = K 5δ Р1 − K 6δ х;
⎪
⎬,
δ m& 2 = δ m& 1 − δ m& д ;
⎪
dδ x
⎪
δ m& д = Tд
;
⎪
dt
⎪
d δ P2
⎪
,
δ m& 2 = Tор
dt
⎭
2
р
q ( Av ) =
где
4 N с.тр
π Avγ ∑
- (2.6.23)
(2.6.24)
Пренебрегая изменением давления на входе ( P1 ≈ const ), атмосферного
давления PH ≈ const , вязким трением и сопротивлением дросселя ς р ≈ 0 ,
приведем уравнения (2.6.23) к безразмерной операторной форме:
(Tр2 s 2 + q ( Av ) s + 1)δ x% = K1δ P%2 − K 4δϕ%пр ⎫
⎪
1
⎬.
( K 6 + Tд s )δ х% ,
δ P%2 = −
⎪
Tор s
⎭
(2.6.25)
Преобразовав систему (2.6.25), получим гармонически линеаризованное
характеристическое уравнение САР давления газа:
TорTр2 s 3 + Tор q( Av ) s 2 + (Tор + K1Tд ) s + K1 K 6 = 0 .
(2.6.26)
После замены в уравнении (2.6.26) s = jω и выделения действительной и
мнимой частей имеем систему из двух уравнений:
X ( Av , ω ) = K1 K 6 − q ( Av )Tорω 2 = 0,
⎫⎪
⎬
Y ( Av , ω ) = ω (Tор + K1Tд − TорTр2ω 2 ) = 0.⎪⎭
(2.6.27)
Из второго уравнения системы (2.6.27) получим
ω=
Tор + K1Tд
TорTр2
(2.6.28)
82
Подставив выражение (2.6.28) для частоты возможных автоколебаний
в первое уравнение системы (2.6.27), после преобразований будем иметь:
q ( Av ) =
K1 K 6Tр2
Tор + K1Tд
(2.6.29)
.
При известном выражении (2.6.24) для q ( Av ) , находим амплитуду
колебаний скорости подвижного узла регулятора:
Av =
4(Tор + K1Tд ) Fс.тр
(2.6.30)
π K1 K 6Tр2γ ∑
Амплитуда перемещения Ax определяется по известному соотношению
Ax = Av / ω .
После нахождения частоты и амплитуды возможных автоколебаний
по выражениям (2.6.28) и (2.6.30) необходимо проверить выполнение
условия (2.6.21), при выполнении которого автоколебания в данной
системе регулирования давления газа существуют на самом деле. Расчеты
параметров автоколебаний (амплитуды перемещения
производят
для
разных
установившихся
Ax и частоты
положений
клапана,
характеризующихся величинами xmax − x0 .
3 СИСТЕМЫ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ ЖРД
3.1 Состав систем управления и регулирования двигателя
В ЖРД все операции по обслуживанию и подготовке к запуску, сам
запуск, выход и работа на режиме, его изменения, останов и другие операции
осуществляются автоматически, т.е. без участия человека. Автоматическая
работа двигателя обеспечивается системой автоматики, которая является
необходимой частью любого ЖРД как с вытеснительной, так и с насосной
подачей топлива [11, 14, 32, 41, 43].
В автоматике ЖРД различают три основные выполняемые функции:
83
управление, регулирование и обслуживание двигателя. В первом случае,
система управления обеспечивает выполнение любой операции, например,
запуск двигателя. Здесь путем строго последовательного включения
различных агрегатов, элементов и систем двигатель “выводится” на заданный
режим работы. Во втором случае система автоматического регулирования
обеспечивает поддержание на заданном уровне и изменение по заданной
программе или специальными командами какого-либо параметра, например
значения тяги.
Наконец, в третьем случае система автоматики должна обеспечивать
обслуживание двигателя, например перед запуском осуществлять контроль
заправки различных емкостей жидкими и газообразными компонентами,
давления в них, положения и состояния различных агрегатов, элементов и
систем двигателя и их готовности к запуску и т.п.
Из всех этих функций автоматики непосредственными ее задачами
являются:
1) управление операциями запуска и останова;
2) регулирование и изменение тяги и соотношения компонентов;
3) управление и регулирование работой систем наддува баков;
4) управление работой системы управления вектором тяги;
5) обеспечение контроля и управления работой всего двигателя в целом.
Для решения этих и других задач в составе двигателя имеются
технические средства, которые включают совокупность различных агрегатов,
механизмов, конструктивных элементов и специальных систем. Эту
совокупность устройств, обеспечивающих управление, регулирование и
обслуживание двигателя обычно и называют автоматикой ЖРД.
Среди устройств автоматики наиболее многочисленными являются
клапаны, дроссели и регуляторы; пневмо- и гидравлические системы,
электрическая сеть. Сюда же входят различные датчики и измерители
давления, расхода, температуры и т.п. Наконец, в системе автоматики могут
быть специальные счетно -решающие устройства, микропроцессоры и ЭВМ.
84
Заметим, устройств автоматики в современных двигателях может быть
несколько десятков, и они составляют (20... 25) % массы двигателя, а иногда
и больше.
Наиболее
многочисленными
устройствами
автоматики
являются
агрегаты управления - клапаны. Они устанавливаются на отдельных участках
различных трубопроводов, по которым движется поток жидких или
газообразных сред. Их назначение — обеспечить либо полное герметичное
разделение двух участков трубопроводов, либо частичное. В соответствии с
этим клапаны имеют два или три положения: в первом случае двухпозиционный клапан с положениями “Закрыто” или “Открыто”, во
втором случае - трехпозиционный клапан с промежуточным положением
“Частично открыто”.
По типу привода клапаны могут быть пневматические, гидравлические,
электромеханические и электромагнитные. для одноразового срабатывания
широко
используются
пироклапаны
(с
пироприводом).
Клапаны
подразделяются на отсечные (запорные), дренажные, предохранительные,
заправочные, сливные и обратные. Отсечные клапаны служат для отсечки
потока рабочего тела, движущегося по трубопроводу, дренажные клапаны
используются дня выпуска наружу паров компонента или газов из отдельных
участков трубопроводов, полостей или емкостей.
Предохранительные
клапаны
автоматически
открываются
при
превышении давления на участке трубопровода или в емкости выше
установленного для выпуска из них наружу паров или газов.
Сливные клапаны служат для слива компонентов из участков
трубопроводов и емкостей.
Через заправочные клапаны происходит заправка емкостей жидкими и
газообразными
компонентами.
Обратные клапаны
пропускают
поток
жидкости или газа только в одном направлении.
В схемах многих двигателей однократного использования часто
используются так называемые мембранные клапаны. Их особенность состоит
85
в том, что в исходном положении участки трубопроводов разделены
мембраной. В нужный момент, например при запуске, мембрана разрывается
либо специальным устройством, либо под действием определенного
давления на участке трубопровода.
Менее многочисленные, чем клапаны, агрегаты регулирования —
дроссели и регуляторы. Назначение первых — плавное изменение местного
гидравлического сопротивления на отдельных участках трубопроводов.
Назначение вторых — поддержание или изменение по определенному закону
или программе расходов компонентов или их давления на соответствующих
участках трубопроводов.
Для управления клапанами и регуляторами, а также выполнения
операций при запуске и останове двигателя в состав автоматики могут
входить баллоны со сжатым газом для пневмосистем, продувки и раскрутки
турбины; емкости для хранения жидких и газообразных компонентов,
используемых для зажигания при запуске, и другие вспомогательные
устройства, необходимые дня функционирования двигателя. Например,
важными элементами являются трубопроводы лиевмо- и гидросистем
автоматики, фидьтры, арматура. Наконец, к автоматике можно отнести
датчики телеметрии, необходимые для последующего анализа и оценки
работы двигателя.
В большинстве случаев одноразового применения двигателей с
достаточно простой программой их работы приведение в действие системы
управления двигателя сводится к подаче команд на запуск, переход на другие
режимы работы или на останов. Все операции и соответствующая
последовательность с заданными временными интервалами срабатывания,
включения и выключения различных агрегатов и систем, необходимые для
запуска, перехода на другие режимы работы и останова, обеспечиваются
автоматикой управления самого двигателя.
Подача команд производится от бортовой либо наземной систем
управления ЛА, которая в зависимости от программы, траекторных и других
86
данных вырабатывает соответствующие команды. В этих случаях схема
двигателя имеет жесткую или “встроенную” программу управления,
осуществляемую автоматикой двигателя.
С развитием ракетной техники и появлением двигателей многократного
использования, во-первых, значительно усложнились схемы и конструкции
двигателей и, во-вторых, значительно возросло значение выполняемых ЛА
задач. В этих условиях возникает необходимость непрерывного управления
двигателем по сложным и гибким программам. Такое управление может
осуществлять специальная система управления двигателем, имеющая в своем
составе ЭВМ. Она включает установку в различных точках трубопроводов и
агрегатов многочисленных датчиков, измеряющих различные параметры:
давление, расход, температуру, частоту вращения, а также частоты и уровни
амплитуд вибраций, значения зазоров вращающихся элементов ТНА,
деформаций напряженных элементов конструкций. Показания датчиков
непрерывно считываются системой управления. Эти данные анализируются
и сравниваются ЭВМ с их заданными предельными значениями. В результате
вырабатываются определенные решения, которые в форме команд также
непрерывно передаются на исполнение соответствующим устройствам
автоматики.
Примером такой управляющей системы может служить система
управления двигателя транспортного корабля «Спейс шатл», схема которой
приведена на рис. 3.1.1.
Основой системы управления двигателем здесь служит специальная
ЭВМ, называемая контроллером. Контроллер выполняет большой круг задач:
1) обеспечивает связь двигателя с управляющей ЭВМ ЛА; 2) производит по
программе предстартовую проверку состояния двигателя, его систем и
агрегатов и их готовность к запуску; 3) осуществляет контроль положения и
состояния
клапанов
последовательность
трубопроводов,
и
блока
операций
заполнение
по
зажигания;
запуску
полостей
4)
выполняет
всю
двигателя
(захолаживание
насосов
компонентами,
87
предварительную продувку полостей за главными клапанами, включение
зажигания и тд.); 5) управляет и регулирует тягу и соотношение компонентов
в двигателе и ЖГГ на всех режимах его работы; 6) выявляет предельные или
опасные режимы работы отдельных устройств и агрегатов двигателя и
обеспечивает необходимое регулирование его параметров; 7) выявляет
нештатные ситуации в системах и агрегатах двигателя и предпринимает
меры, обеспечивающие штатное продолжение работы;
Рис. 3.1.1 Схема системы управления двигаталем многоразового транспортного
космического корабля “Спейс шаттл”
8) после завершения полета передает в бортовую ЭВМ управления ЛА всю
информацию о рабочих характеристиках и состоянии двигателя, его
агрегатов и систем для последующего обследования и профилактики.
3.2 Пневматические и гидравлические клапаны ЖРД
Клапан окислителя – прямоточный, двухпозиционный. Крепится
входным фланцем к трубопроводу, отводящему окислитель от насоса, и
выходным фланцем – к газогенератору.
Клапан состоит из корпуса 1 (рис. 3.2.1), патрубка 3, соединенных
между собой шпильками.
88
Разъем
между
корпусом
и
патрубком
уплотняется
медным
уплотнительным кольцом 10 и фторопластовым кольцом 9. Корпус 1 имеет
центральное тело, связанное с наружной оболочкой корпуса четырьмя
пилонами в, и фланец, на который ранее устанавливался дренажный клапан.
Центральное тело корпуса служит для размещения подвижного клапана
2 и цилиндрической пружины 6. В клапане 2 запрессованы фторопластовые
кольца 5, 4, 11. Внутренние поверхности центрального тела корпуса 1 и
клапана 2 образуют изолированную от гидравлического тракта а полость б,
которая соединена каналом со входом в насос O .
а
б
Рис. 3.2.1. Общий вид клапана О-2 (а) и его конструктивная схема:1 — корпус; 2
— клапан; 3 — патрубок; 4, 5 — фторопластовое кольцо; 6 — пружина; 7 —
заглушка; 8 — уплотнительное кольцо; 9 — фторопластовое кольцо; 10 —
уплотнительное кольцо; 11 — фторопластовое кольцо.
Подвижный клапан 2 может занимать два положения: положение I –
клапан закрыт и положение II – клапан открыт. В закрытом положении
клапан 2 фторопластовыми кольцами 4 и 5 прижимается к седлу патрубка 3
пружиной 6 и усилием, создаваемым давлением окислителя, действующего
на внутреннюю поверхность клапана со стороны полости б, ограниченную
окружностью фторопластового кольца 4.
В открытом положении клапан 2 прижимается фторопластовым
кольцом 11 к седлу на центральном теле. Усилие прижатия создается
89
разностью давления окислителя, действующего на внутреннюю (со стороны
полости б) и наружную (со стороны полости а) поверхности клапана 2,
которые
ограничиваются
внешним
диаметром
клапана.
Пружина
6
уменьшает усилие прижатия.
Перед запуском двигателя подвижный клапан 2 в положении I
прижимается к седлу патрубка 3 пружиной 6 и усилием, создаваемым
давлением окислителя, действующего на внутреннюю поверхность клапана,
ограниченную окружностью фторопластового кольца 4. Давления окислителя
в полостях а и б равны между собой и равны давлению окислителя на входе в
насос.
При раскрутке насоса окислителя от пиротурбины давление окислителя
в полости а повышается, а в полости б остается равным давлению окислителя
на входе в насос. При повышении давления до 11-17 кгc/см2 клапан 2
открывается и переходит в положение II.
При выключении двигателя давление в полости a падает и под
действием усилия от пружины 6 и от давления окислителя, действующего на
внутреннюю
поверхность
клапана,
ограниченную
окружностью
фторопластового кольца 4, клапан 2 закрывается.
Клапан горючего предназначен для управления подачей горючего в
камеру сгорания при пуске и выключении двигателя (рис. 3.3.1).
90
Рис. 3.3.1. Схема системы подачи горючего:1 — камера; 2 — патрубок «Г»; 3 —
клапан Г-1; 4 — дроссель; 5 — насос «Г»; 6 — прибор 11Л621; 7 — клапан
управления; 8 — дроссельная шайба Ш-1А; 9 — трубопровод.
Клапан состоит из корпуса I (рис. 3.3.2), проставки 3, соединенных
между собой пятью винтами 9. Разъем между корпусом и проставкой
уплотняется резиновым уплотнительным кольцом 10. Корпус 1 имеет
центральное тело, связанное с наружной оболочкой корпуса четырьмя
пилонами. Центральное тело корпуса служит для размещения подвижного
клапана 2 и цилиндрических пружин 6 и II.
В клапане 2 запрессованы резиновые уплотнительные кольца 4,5 и
установлены уплотнительные кольца 14 и 15.
Внутренние поверхности центрального тела корпуса I и клапана 2
образуют изолированную от гидравлического тракта а полость б, которая
соединена каналом с входом в насос "Г".
Подвижный клапан 2 может занимать два положения: положение 1 клапан закрыт и положение 2 - клапан
открыт. В закрытом положении
клапан 2 резиновыми уплотнительными кольцами 4 и 5 прижимается к седлу
проставки 3 пружинами 6,11 и усилием, создаваемым давлением горючего,
действующего на внутреннюю поверхность клапана (со стороны полости б),
ограниченную окружностью кольца 4.
91
а
б
Рис. 3.3.2. Общий вид клапана Г-1 (а) и его конструктивная схема (б): 1 - корпус; 2
- клапан; 3 - проставка; 4, 5 - резиновое кольцо; 6 - пружина; 7 - заглушка; 8 уплотнительное кольцо; 9 - винт; 10 - уплотнительное кольцо; 11 - пружина; 12 заглушка; 13 - уплотнительное кольцо; 14, 15 - уплотнительное кольцо
В открытом положении клапан 2 прижимается к седлу на центральном
теле.
Усилие
прижатия
создается
разностью
давлений
горючего,
действующего на внутреннюю (со стороны полости б) и наружную (со
стороны полости а) поверхности клапана 2, которые ограничиваются
внешним диаметром клапана. Пружины 6 и 11 уменьшают усилие прижатия.
В корпусе 1 выполнено отверстие в , через которое удаляются остатки
горючего из сливной полости после останова двигателя.
Перед запуском двигателя подвижный клапан 2 в положении I
прижимается в седлу проставки 3 пружиной 6 и усилием, создаваемым
давлением горючего, действующего на внутреннюю поверхность (со стороны
полости б) клапана 2, определенную окружностью кольца 4. Давление
горючего в полостях а и б равны между собой и равны давлению горючего
на входе в насос. При раскрутке насоса горючего от пиротурбины давление
горючего в полости а повышается, а в полости б остается равным давлению
горючего на входе в насос. Равновесие сил, действующих на поверхность
клапана 2, ограниченную внешней окружностью и окружностью кольца 4,
нарушается. Возникает сила, направленная в сторону открытия клапана, и
как только эта сила превысит силы, действующие на внутренние поверхности
92
клапана со стороны полости б (от давления горючего и от пружины), клапан
2 займет положение 2.
При выключении двигателя для ускорения закрытия клапана Г-I в
полость олива подается высокое давление от баллона через клапан
управления.
3.3 Схемы и принцип действия регуляторов тяги ЖРД
В данном разделе рассматриваются различные конструкции агрегатов
регулирования
тяги
ЖРД
(расхода
компонента
в
газогенератор),
используемых в топливных системах [10, 11, 15, 46]. Несмотря на
определенные
различия
по
используемому
рабочему
телу,
последовательности расположения основных узлов, реализации алгоритмов и
циклограмм управления работой регуляторов в составе двигателя, все они
могут быть отнесены к определенному типу регуляторов прямого действия.
Для регуляторов этого типа характерны следующие параметрические
особенности: принципиальное наличие статической ошибки поддержания
расхода, высокое быстродействие и надежность. Последнее качество
является
доминирующим
при
выборе
регуляторов
этого
типа
для
использования в составе ЖРД.
Структурно регулятор расхода прямого действия представляет собой
два
гидравлических
дифференциальный
дросселя
клапан
переменного
и
дроссельный
проходного
кран,
сечения:
соединенные
соответствующим образом.
Принцип действия гидромеханического регулятора прямого действия
(рис. 3.3.1) основан на поддержании постоянного перепада давления
жидкости на дроссельном кране.
Массовый расход жидкости через дроссельный кран определяется
зависимостью:
(ϕ )
m& др
= μдр Fдр (ϕ ) 2 ρ ( РА − Рвых ) ,
(3.3.1)
93
где
μдр -коэффициент расхода жидкости дроссельного крана; Fдр - площадь
проходного сечения дроссельного крана, м2;
дроссельного крана, град.;
ϕ - угол поворота привода
ρ - плотность компонента топлива (жидкости),
кг/м3; РА , Рвых -давления на входе в дроссельный кран и на выходе из
регулятора, Па.
При
постоянной
настройке
дроссельного
крана
( μдр =const,
Fдр (ϕ ) =const) расход жидкости определяется только разностью давлений
РА − Рвых и, если она поддерживается постоянной, то и расход жидкости
будет постоянным. Таким образом, регулятор компенсирует влияние
внешних и внутренних возмущающих факторов, влияющих на расход
жидкости.
Рис. 3.3.1 - Принципиальная схема
гидромеханического регулятора расхода
топлива
прямого
действия:
1
–
дифференциальный клапан; 2 – пружина; 3
– жиклер; 4 – настраиваемый дроссельный
кран; 5 – каналы подвода давлений к
дифференциальному клапану
Регулирование режима работы ЖРД производится изменением площади
проходного
сечения
Fдр (ϕ )
дроссельного
крана
4
с
помощью
электропривода. Если по какой-либо причине перепад давления на
дроссельном кране РА − Рвых изменится, то соответственно изменится и
расход горючего. Информация об изменении перепада давления через каналы
обратной связи 5 и жиклёр 3 попадает на чувствительный элемент - поршень
дифференциального клапана, что приводит к
нарушению равновесия
действующих на него сил. Поршень перемещается, восстанавливая перепад
давления РА − Рвых , а значит и расход горючего. Например, если перепад
давления РА − Рвых увеличится, то в ответ на это дифференциальный клапан
94
начнёт уменьшать площадь проходного сечения, чтобы компенсировать
возникшее возмущение, т.е. уменьшит расход жидкости. Дифференциальный
клапан настраивается с помощью пружины 2 на заданный перепад давления.
Так как регулятор прямого действия, то функции чувствительного элемента и
исполнительного органа совмещены в одном узле – дифференциальном
клапане 3.
Для обеспечения эффективного регулирования ЖРД на регуляторе
должен быть большой перепад давлений. С повышенным перепадом
давления связана одна из особенностей регулятора – появление на
дифференциальном клапане существенной гидродинамической силы. Эта
сила пропорциональна скоростному напору жидкости, т.е. перепаду давлений
на дифференциальном клапане Рвх − РА . Гидродинамическая сила, так же
как
и
сила,
создаваемая
пружиной,
зависит
от
положения
дифференциального клапана, однако она направлена в противоположную
сторону. В некоторых случаях жёсткость пружины оказывается меньше
жесткости так называемой гидродинамической пружины, что может
привести к изменению статизма регулятора, т.е. наклона его статической
характеристики. Изменение знака статизма, т.е. переход к отрицательному
статизму, может явиться причиной потери внутридвигательной устойчивости
системы
ЖРД – регулятор. Гидродинамическая сила является важной
характеристикой регулятора, однако из-за сложности картины течения
жидкости в его проточной части с резкими изменениями направления,
отрывами потока ее практически не удаётся определить расчётным путём. В
большинстве случаев гидродинамическую силу приходится определять
экспериментально,
сопоставляя
расчётные
и
опытные
статические
характеристики.
Другой важной особенностью гидромеханических регуляторов является
большое влияние на их динамику присоединённой к подвижным частям
массы жидкости. Площади проходных сечений каналов 5 во много раз
меньше площади поршня дифференциального клапана и ускорение жидкости
95
в каналах во много раз больше, чем ускорение поршня. Поэтому
инерционные
эффекты
Присоединённая
к
в
каналах
подвижному
могут
элементу
оказаться
клапана
существенными.
масса
жидкости
4
определяется как масса жидкости в каналах, увеличенная в (d п / d к ) раз, где
d п - диаметр поршня дифференциального
клапана 1, dк - диаметр
проходного сечения каналов 5. Например, при диаметре поршня 40 мм и
диаметре канала 4 мм масса жидкости в канале в 1 грамм превращается в
присоединённую массу в 10 кг. Таким образом, наличие даже относительно
коротких каналов с небольшой площадью проходного сечения приводит к
значительному увеличению приведенной массы подвижных элементов
регулятора.
По взаимному расположению основных узлов рассматриваемые
агрегаты могут быть подразделены на регуляторы “прямой” схемы и
“перевернутой”, когда узел дроссельного крана установлен на входе в
регулятор, узел дифференциального клапана — на выходе.
Наряду с отмеченными выше особенностями, возможность совмещения
в одном агрегате функций регулирования расхода рабочего тела по внешним
управляющим воздействиям и стабилизации его при отсутствии внешних
команд также является существенным преимуществом, что позволило
расширить область их применения.
Ниже
приведены
конструктивные
схемы
регуляторов
расхода,
применяемых на уже созданных и эксплуатирующихся ЖРДУ.
Конструктивно регулятор расхода “прямой” схемы (рис. 3.3.2)
выполнен в виде агрегата прямоточного типа и включает в себя следующие
основные узлы:
− узел дроссельного крана;
− узел дифференциального клапана;
− узел привода подвижной части дроссельного крана;
− узел перестройки режима.
96
Наличие вышеперечисленных узлов позволяет с помощью этого
регулятора осуществлять:
− изменение режима работы двигателя с промежуточного на основной;
− управление режимом работы двигателя в диапазоне от минимального до
максимального в соответствии с сигналами по каналам РКС и АС;
− стабилизацию заданного режима при отсутствии команд от СУ.
Узел дроссельного крана содержит две части. Первая часть —
подвижная втулка 3 механизма перестройки, опирающаяся на пружину 2,
имеет
два
фиксированных
положения,
определяющих
расход
на
промежуточном и основном режиме. Вторая часть дроссельного крана
состоит из втулки 24 с профилированными окнами и поршня 22, связанного с
приводом регулятора с помощью рейки 20.
Рис. 3.3.2 - Регулятор расхода Р1: 1 — корпус, 2 — пружина механизма перестройки узла
дроссельного крана с промежуточного режима на основной, 3 — подвижная часть
механизма перестройки узла дроссельного крана, 4 — жиклер–замедлитель, 5 — место
установки пиропатрона, 6 — поршень механизма перестройки, 7 — шток, 8 — стакан–
пламегаситель, 9 — узел стыковки с РМ,10 — лимб, 11 — стопорный винт, 12 — жиклер
узла дифференциального клапана,13 — подвижная втулка узла дифференциального
клапана, 14 — пружина узла дифференциального клапана, 15 — неподвижная втулка узла
дифференциального клапана,16 — дросселирующее отверстие узла дифференциального
97
клапана, 17 — стакан,18 — поршень узла дифференциального клапана, 19 — корпус узла
настройки начальной затяжки пружины дифференциального клапана, 20 — рейка привода
подвижной части дроссельного крана, 21 — торсион привода РКС, 22 — поршень узла
дроссельного крана, 23 — винт регулировки расхода на промежуточном режиме, 24 —
втулка узла дроссельного крана, а — полость высокого давления узла дроссельного крана,
б — полость высокого давления на входе в регулятор, в — полость низкого давления узла
дроссельного крана, г — полость механизма перестройки за жиклером–замедлителем
Втулка и поршень узла дроссельного крана выполнены из стали 9Х18,
рейка — из стали 2Х13. Винт 23 настройки расхода на предварительном
режиме позволяет изменять этот параметр по результатам предварительных
проливок агрегата и термодинамического расчета двигателя.
Узел дифференциального клапана состоит из неподвижной втулки 15,
подвижной втулки 13 и связанного с ней поршня 18, опирающегося на
пружину 14. Все детали узла выполнены из стали 9Х18. Давления до и после
проходного сечения дроссельного крана подводятся к поршню клапана в
полости а и в. В канале подвода давления до дроссельного крана в
поршневую полость дифференциального клапана устанавливается сменный
демпфирующий жиклер 12.
Узел привода состоит из стыковочной муфты 9 и торсиона 21 с
шестерней, вращающегося в двух подшипниках. Для определения углового
положения торсиона на нем установлен лимб 10. Угол поворота торсиона
составляет от 90o до 215o по шкале лимба.
Для обеспечения поднастройки регулятора расхода без разборки
агрегата муфта 9 соединена с торсионом 21 посредством червяка, который
позволяет при неподвижной муфте изменять угловое положение валика от
+7,5o до −10o относительно номинального положения. Для предотвращения
попадания компонента топлива в полость муфты приводного механизма за
уплотнительным кольцом предусмотрен дренаж утечек на срез сопла
двигателя. Материал торсиона и червяка — сталь 2Х13.
Узел перестройки режима состоит из пиропатрона, устанавливаемого в
гнездо 5, и поршня 6, выполненного из стали 9Х13. На конце штока 7
имеется уплотнительное кольцо, которое разделяет полость а регулятора от
полости г механизма перестройки. Для обеспечения плавного нарастания
98
площади проходного сечения дроссельного крана при выходе двигателя на
основной режим установлен жиклер–замедлитель 4.
Корпус 1 регулятора изготовлен из алюминиевого сплава АК-8, а
стакан 16 — из материала ВТЭ-1. К входному фланцу регулятора крепится
фильтр для очистки компонента топлива.
Статическая ошибка данного регулятора обусловлена совмещением в
дифференциальном клапане функций исполнительного и чувствительного
элементов. В значительной мере статизм может быть скомпенсирован
гидродинамической силой, возникающей за счет действия на подвижную
часть клапана струи, вытекающей из окон 16. Таким образом, если
пренебречь
этим
незначительным
остаточным
статизмом,
дифференциальный клапан поддерживает постоянным перепад давления на
проходном сечении дроссельного крана с момента вступления в работу. Этот
момент определяется достижением равновесия между требуемым и
располагаемым
перепадами
давления
на
всем
регуляторе
как
на
гидравлической системе, состоящей из двух дросселирующих элементов.
При работе регулятора в режиме управления в соответствии с
командами от РКС и АС изменение расхода компонента топлива
производится
путем
осевого
перемещения
подвижной
части
узла
дроссельного крана 22. При этом узел дифференциального клапана
поддерживает постоянным перепад давления на проходном сечении
дроссельного крана за счет изменения степени дросселирования компонента
топлива на отверстиях 16. Начальная величина поддерживаемого перепада
устанавливается затяжкой пружины 14.
Режим стабилизации реализуется при отсутствии команд со стороны
РКС и АС, когда проходное сечение дроссельного крана неизменно, а
дифференциальный
клапан
компенсирует
возможные
изменения
настроечного перепада на дроссельном кране за счет своего перемещения.
Обычно эти изменения связаны с изменением перепада давления на всем
99
регуляторе за счет действия внешних факторов (изменение КПД насоса,
наличие утечек, изменение температуры компонента топлива и т. п.).
Команда на переход двигателя с промежуточного режима на основной
осуществляется путем подачи напряжения на пиропатрон, входящий в состав
механизма узла перестройки, при этом газы, поданные под поршень 6,
вызывают перемещение штока 7, что обеспечивает сообщение полостей а и г.
Поступивший в полость г компонент топлива перемещает подвижную втулку
3 механизма перестройки до упора пружины 2. Площадь проходного сечения
дроссельного крана увеличивается, что обеспечивает выход двигателя на
основной режим.
Регулятор “перевернутой” схемы (рис 3.3.3) [46] также является
исполнительным органом системы управления ракетоносителя.
100
Рис. 3.3.3 - Регулятор расхода Р3: 1 — корпус регулятора, 2 — стакан, 3 — гайка, 4 —
корпус фильтра, 5 — шайба упорная, 6 — регулировочная игла, 7 — гайка
регулировочного винта, 8 — лимб, 9 — фиксатор,10 — поводок, 11 — винт, 12 — червяк,
13 — валик, 14,15,16 — уплотнительные кольца, 17,18 — регулировочные шайбы, 19 —
регулировочный винт, 20 — пробка, 21 — пружина, 22 — регулировочная шайба, 23 —
золотник, 24 — направляющая пружины, 25 — втулка, 26 — вентиляционный жиклер, 27
— штуцер, 28 — регулировочная шайба, 29 — рейка, 30 — втулка, 31 — валик с
шестерней, 32 — кольцо, 33 — стакан–пламегаситель, 34 — гайка, 35 — корпус узла
перестройки режима, 36 — поршень,37 — кольцо, 38 — гайка, 39 — шток, 40 — втулка,
41 — пружина, 42 — опора пружины, 43 — стопорное кольцо, 44 — золотник, 45 —
поршень, 46 — жиклер, 47 — регулировочная шайба, 48 — корпус фильтра, 49 — сетка,
50 — фиксатор, а — отверстие во втулке,б — полость давления за дроссельным краном,
в— профилированные окна во втулке узла дифференциального клапана, г — канал
подвода давления в командную полость, д — подпружиненная полость золотника
дифференциального клапана, е — командная полость,ж — мембрана, з —
профилированные окна во втулке узла дроссельного крана
Регулятор
Р3
выполняет
аналогичные
функции:
поддержание
постоянного расхода компонента топлива на промежуточном и основном
101
режимах при отсутствии команд от системы управления; изменение расхода
компонента топлива на основном режиме по командам от системы
управления; перевод режима работы двигателя с промежуточного на
основной.
Регулятор расхода Р3 конструктивно состоит из корпуса, фильтра, узла
дроссельного крана, узла дифференциального клапана, узла привода
подвижной части дроссельного крана, узла перестройки режима.
Корпус 1 предназначен для размещения и крепления к нему узлов и
деталей регулятора. Со стороны входа в регулятор компонента топлива на
корпусе имеется фланец для крепления регулятора на двигателе.
На боковой поверхности корпуса расположены резьбовые гнезда для
регулировочной иглы 6 с гайкой 7, пробки 20 с регулировочным винтом 19,
фиксатора 50, штуцера 27 и узла перестройки режима.
Фильтр служит для очистки компонента топлива, поступающего во
внутреннюю полость регулятора и состоит из корпуса 4 и припаянных к нему
сеток — двух каркасных и одной фильтрующей. Сторона ячейки
фильтрующей сетки — (35...40) мкм . Фильтр устанавливается в корпус 1
регулятора до упора в шайбу 5 и крепится к корпусу гайкой 3 через стакан 2.
Узел дроссельного крана предназначен для изменения расхода
компонента топлива в заданном диапазоне эксплуатационных режимов
работы двигателя и состоит из рейки 29, втулки 30, пружины 41, опоры 42
пружины, стопорного кольца 43, золотника 44 и поршня 45. Втулка с
поршнем представляет собой прецизионную золотниковую пару.
Во втулке имеются: два профильных дозирующих окна з, через
которые проходит компонент топлива; отверстие а для размещения
профильной регулировочной иглы 6, обеспечивающее заданный расход
компонента
топлива
на
промежуточном
режиме;
канавка
для
уплотнительного кольца; гнездо для размещения временного замедлителя.
В угловом положении втулка фиксируется винтом 50, а в осевом
направлении ее положение определяется соосностью отверстия а с
102
регулировочной
иглой
6.
Соосность
обеспечивается
при
помощи
регулировочных шайб 22.
Поршень 45 имеет кольцевую канавку, в которую входит шток 39
механизма перестройки режима, фиксирующий положение поршня на
промежуточном режиме. На основном режиме поршень упирается в рейку
29.
С
помощью
узла
дифференциального
клапана
осуществляется
поддержание заданного постоянного перепада давления компонента топлива
на окнах з дроссельного крана путем изменения проходного сечения окон в
при перемещении золотника 23 внутри втулки 25. Втулка 25 и золотник 23
представляют собой прецизионную пару.
Во втулке имеются: четыре профилированных окна в, предназначенных
для изменения перепада давления на дифференциальном клапане; канавки
для размещения уплотнительных колец.
На наружной поверхности золотника расположены канавки, служащие
для гидравлической центровки золотника. Пружина 21 центрируется по
направляющей 24 и отжимает золотник в сторону максимального открытия
окон в. Ход золотника определяется регулировочными шайбами 28 и 18, а
величина сжатия пружины — регулировочными шайбами 17.
Узел привода предназначен для перемещения рейки 29 узла
дроссельного крана по командам от системы управления. Поводок 10 через
валик 13 соединен с валиком 31 и застопорен фиксатором 9. Валик 31
установлен в корпусе регулятора на двух подшипниках. Фторопластовое
кольцо 16 воспринимает осевые усилия, действующие от внутреннего
давления на валик при работе регулятора, герметичность по приводному
валику 31 обеспечивается уплотнительными кольцами 14 и 15.
На поводке установлено устройство, позволяющее производить
внешнюю подрегулировку расхода компонента топлива на основном режиме,
не снимая регулятора с двигателя. Подрегулировка осуществляется путем
вращения червяка 12, которое через валик 31 перемещает рейку 29 — при
103
повороте лимба на увеличение угла номинальный расход компонента
топлива увеличивается и наоборот. В процессе регулировки поводок 10
должен быть зафиксирован винтом 9.
Механизм перестройки режима крепится к корпусу регулятора гайкой
38 и предназначен для перевода режима работы двигателя с промежуточного
на основной. Втулка 40 механизма перестройки ввернута в корпус 35 и
зафиксирована на нем штифтами. Во втулку вставлен шток 39, на котором
предусмотрены канавки лабиринтного уплотнения. На резьбовой части
штока установлен поршень 36, который крепится гайкой 34. В корпусе 35
предусмотрено резьбовое гнездо для установки пиропатрона. Внутренняя
полость механизма перестройки предохранена от попадания влаги кольцом
32.
Временной
замедлитель
(см.
разрез
А-А)
предназначен
для
обеспечения заданного времени перехода регулятора с промежуточного
режима на основной и состоит из сменного жиклера 46, регулировочной
шайбы 47, корпуса 48 фильтра с жиклером постоянного сечения и сетки 49.
Заданное время перехода регулятора с промежуточного режима на
основной обеспечивается путем подбора диаметра жиклера 46.
Компонент топлива, поступающий в регулятор при заполнении,
вытесняет воздух по основному тракту через штуцер 27, а из командной
полости е дифференциального клапана — через вентиляционный жиклер 26,
при этом до момента вступления регулятора в работу золотник 23
дифференциального клапана отжат пружиной 21 в сторону максимального
открытия окон в.
Включение регулятора осуществляется открытием пускового клапана,
установленного за регулятором. При работе двигателя на промежуточном
режиме поршень 45 упирается в шток 39, компонент топлива проходит через
фильтр, отверстие а во втулке дроссельного крана, отверстие б в корпусе
регулятора и поступает в подпружиненную полость д дифференциального
клапана. Из подпружиненной полости через окна в компонент направляется к
104
штуцеру 27 и оттуда на выход регулятора. Одновременно компонент топлива
через канал г в корпусе регулятора поступает в командную полость е
дифференциального клапана.
Переход на основной режим осуществляется путем подачи напряжения
на пиропатрон узла перестройки. Под действием давления пороховых газов
поршень 36 со штоком 39 перемещаются внутри стакана–пламегасителя,
срезая мембрану ж и освобождая, тем самым, поршень 45 узла дроссельного
крана. Поршень 45 под действием перепада давлений, преодолевая усилие
пружины 41, перемещается до упора в торец рейки 29. Окна з дроссельного
крана открываются, обеспечивая номинальный расход компонента топлива
на основном режиме. Время перехода регулятора с промежуточного режима
на основной определяется скоростью перемещения поршня до упора в торец
рейки,
то
есть
скоростью
вытеснения
компонента
топлива
из
подпружиненной полости узла дроссельного крана через жиклер 46.
Изменение
расхода
компонента
топлива
на
основном
режиме
осуществляется по командам от СУ на рулевой привод (рулевую машину),
состыкованный с поводком 10 регулятора. Это вызывает, с учетом
механического контакта между рейкой 29 и поршнем 45, изменение площади
проходного сечения узла дроссельного крана.
Работа регулятора в режиме стабилизации осуществляется аналогично
рассмотренным выше агрегату.
3.4 Выбор параметров и расчет статических характеристик
регулятора тяги на основе его математической модели
Проектирование регулятора расхода топлива базируется на основе его
математической модели, составленной по законам физики, механики,
гидравлики. С использованием этих законов выводятся уравнения элементов,
которые объединяются в систему дифференциальных и алгебраических
уравнений, представляющих собой математическую модель регулятора. При
этом нельзя учесть все факторы, действующие на элементы регулятора,
105
поэтому принимаются определенные упрощающие допущения. На основе
математической модели регулятора можно разработать методику выбора его
основных
параметров,
рассчитать
его
статические
и
динамические
характеристики. Используя эти характеристики, можно оценить статическую
погрешность регулятора, устойчивость и качество процессов регулирования,
произвести коррекцию его параметров с целью обеспечения требуемого
запаса устойчивости системы.
При выводе уравнений регулятора, расчетная схема которого приведена
на рис. 3.4.1, принимаются следующие допущения [10, 11, 46]:
- объемная податливость топлива и стенок регулятора не учитываются
из-за их малости;
- гидравлические потери в дросселирующих элементах учитываются по
квазистационарной модели;
- сухое трение в подвижных элементах отсутствует;
- утечка топлива по зазорам подвижных элементов дифференциального
клапана мала по сравнению с расходом жидкости через жиклер;
- гидравлические потери на жиклере и в каналах обратной связи
учитываются по ламинарной модели движения жидкости;
- гидравлические потери и сила инерционного сопротивления участков
регулятора по основному потоку жидкости не учитываются из-за их малости
по сравнению с потерями на дроссельном кране и дифференциальном
клапане;
- массовые расходы жидкости в узких каналах обратной связи
пренебрежимо малы по сравнению с расходом жидкости через регулятор;
- дросселирующее сечение дифференциального клапана представляет
собой четыре треугольных окна.
При выводе уравнений элементов регулятора очень важно правильно
задать направление движения подвижных элементов и течения жидкости в
соответствии с изменениями возмущающего или управляющего воздействий.
На рисунке стрелкой показано направление движения дифференциального
106
клапана (вправо) при увеличении давления на входе в регулятор и при
прикрытии дроссельного крана.
Рис. 3.4.1. Расчетная схема гидромеханического регулятора расхода жидкости
прямого действия: 1 – корпус; 2 – втулка; 3 – жиклер; 4 – дифференциальный
клапан; 5 – пружина; 6 – дросселирующее окно треугольного профиля; 7 –
каналы подвода давлений к дифференциальному клапану; 8 – дроссельный
кран; 9 – привод дроссельного крана
Чувствительным элементом и одновременно исполнительным органом
регулятора является дифференциальный клапан 3, который описывается
уравнением
инерции,
движения или баланса сил, действующих на поршень (сил
сопротивления
трения,
пружины,
перепада
давления
и
гидродинамической силы) [10, 42]:
d 2x
dx
М п 2 + λтр
+ γ прж x = Fп ( PБ − PВ ) − N пр + N гд ,
dt
dt
(3.4.1)
где М п - приведенная масса подвижной части дифференциального клапана,
кг; x - координата клапана вдоль его оси, м; t - время, с;
λтр = μ l bз / δ з -
коэффициент, учитывающий вязкое трение; μ - динамическая вязкость
жидкости, Па⋅с;
l = π d п - длина окружности поршня, м;
d п - диаметр
поршня, м; bз - ширина контактирующей с втулкой кольцевой поверхности
поршня, м; δ з - зазор между поршнем и втулкой, м; γ прж - жесткость
пружины, Н/м; Fп - площадь поршня, на которую действуют давления PБ и
107
PВ - давления в полостях Б и В, м2; N пр - предварительный натяг пружины
(при
x = 0 ), Н; N гд - гидродинамическая сила, действующая на клапан, Н.
Гидродинамическая сила возникает из-за того, что при течении
жидкости через треугольные окна давление в узком сечении падает на
величину, пропорциональную скоростному напору:
N гд = сгд ρ v 2 Fт / 2 ,
(3.4.2)
где сгд - коэффициент гидродинамической силы;
ρ - плотность жидкости,
кг/м3; v - скорость потока жидкости в узком сечении дросселирующих окон,
м/с; Fт - эквивалентная площадь торца клапана в окрестности треугольных
окон, зависящая от положения клапана, м2
сгд
Коэффициент
аналогичен
коэффициентам,
вводимым
в
гидромеханике для определения сил, действующих на обтекаемое тело.
Скорость потока жидкости в узком сечении определяется ее объемным
расходом на входе в регулятор
v = m& дф /( ρ μ дф Fдф )
(3.4.3)
& дф - массовый расход жидкости через дифференциальный клапан (на
где m
входе в регулятор);
μ дф , Fдф - коэффициент расхода и площадь проходного
сечения треугольных окон.
При выводе уравнений соединительных каналов обратных связей
можно
принять
течение
жидкости
ламинарным,
квазистационарным,
жидкость несжимаемой и учитывать только ее инерцию и потери давления на
трение о стенки. Для каналов, соединяющих полости Б и В со входом в
дроссельный кран и с его выходом, эти уравнения имеют вид:
LБ
dm& Б
+ ( RБ + Rж )m& Б = PА − PБ ;
dt
(3.4.4)
LВ
dm& В
+ RВ m& В = PВ − Pвых ,
dt
(3.4.5)
108
где LБ = lБ / FБ + lж / Fж - удельная акустическая индуктивность канала,
соединяющего полость А с полостью Б, 1/м; lБ - длина канала, м; FБ эквивалентная площадь проходного сечения канала, м2; lж - длина канала
& Б - массовый
жиклера, м; Fж - площадь проходного сечения жиклера, м2; m
расход жидкости в полость Б, кг/с; RБ = 128ν lБ /(π d Б ) - гидравлическое
4
сопротивление канала, 1/(м⋅с); d Б - эквивалентный диаметр проходного
сечения
канала,
м;
ν
-
кинематическая
вязкость
жидкости,
м/с;
Rж = 128ν lж /(π d ж4 ) - гидравлическое сопротивление жиклера, 1/(м⋅с); d ж
- диаметр жиклера, м; PА - давление жидкости в полости А , Па; LВ = lВ / FВ удельная акустическая индуктивность канала, соединяющего полость В с
выходом дроссельного крана, 1/м; lВ - длина канала, м; FВ - эквивалентная
& В - массовый расход жидкости в
площадь проходного сечения канала, м2; m
полость В , кг/с; RВ = 128ν lВ /(π d В ) гидравлическое сопротивление канала,
4
1/(м⋅с); d В - эквивалентный диаметр проходного сечения канала из полости
В , м; Pвых - давление жидкости на выходе из регулятора, Па.
Эквивалентные диаметры и площади проходных сечений каналов равны
их соответствующим значениям, если каналы однородны, то есть не имеют
диаметральных уступов. В противном случае эквивалентные параметры
нужно определять, исходя из суммарной акустической индуктивности или
сопротивления участков каналов с различными диаметрами с последующим
пересчетом их в эквивалентные величины при исходной общей длине.
Расходы жидкости через подводящие каналы связаны между собой и
с перемещением дифференциального клапана зависимостями
m& Б = m& В ; m& В = ρ Fп
dx
.
dt
(3.4.6)
Расход жидкости через треугольные окна дифференциального клапана
и дроссельный кран определяются зависимостями:
109
m& дф = μ дф Fдф ( x) 2 ρ ( Pвх − PА ) ;
(3.4.7)
(ϕ )
m& др
= μдр Fдр (ϕ ) 2 ρ ( PА − Pвых ) ,
(3.4.8)
(ϕ )
& др - массовый расход
где Pвх - давление жидкости на входе в регулятор, Па; m
жидкости на выходе из регулятора, кг/с;
μ др , Fдр – коэффициент расхода и
площадь проходного сечения дроссельного крана, м2;
ϕ - угол поворота
привода
треугольных
дроссельного
крана,
град.
Площадь
окон
дифференциального клапана связана с его ходом зависимостью
Fдф ( x) = 4(h − x) 2 tg β
где h - высота треугольных окон, м;
(3.4.9)
β - половина угла при вершине окон,
град (рис. 3.4.2).
Площадь проходного сечения дроссельного крана является функцией
угла поворота электропривода Fдр (ϕ ) , и эту зависимость можно подобрать по
требуемому закону изменения расхода жидкости через регулятор от угла ϕ .
Так как сжимаемость жидкости и податливость стенок регулятора не
учитываются, то справедливо равенство
(ϕ )
m& дф = m& др
.
(3.4.10)
Таким
образом,
ясно,
математическая
модель
гидромеханического
представляет
что
регулятора
собой
систему
дифференциальных и алгебраических
уравнений (3.4.1)…(3.4.10), на основе
Рис. 3.4.2. Схема треугольного окна
дифференциального клапана
которых можно составить методику
выбора основных параметров.
Статическая характеристика регулятора топлива необходима для
определения его статической погрешности при изменении перепада давления
110
на нем и коэффициентов передачи (усиления) при отклонении угла поворота
привода дроссельного крана и изменения давления на входе. Для выбора
параметров и расчета статической характеристики регулятора необходимо
знать некоторые режимные параметры, задаваемые в результате термогазодинамического расчета ЖРД. Эти параметры зависят от схемы и тяги
двигателя, режима его работы, компонентов топлива.
Расчет статической характеристики регулятора проводится на основе
представленной выше математической модели для установившегося режима,
то есть когда в уравнениях производные равны нулю. При этом частью
параметров приходится задаваться, исходя из соображений создания
компактной конструкции регулятора и опыта разработки аналогичных
регуляторов - прототипов.
Предположим, что в результате термогазодинамического расчета
расчета ЖРД заданы следующие режимные параметры:
1)
2)
& (рϕ. НАР
m& (рϕ. НАР
, m
- минимальный и максимальный расходы горючего на выходе
из регулятора в момент начала автоматической работы (НАР), кг/с;
ΔPдр. НАР - перепад давления на дроссельном кране в момент начала
автоматической работы регулятора, Па;
Pвых - давление на выходе из регулятора, Па;
Pвх.нм ; Pвх.нб - наименьший и наибольший давления на входе в регулятор, Па;
индексы ϕ1 и ϕ 2 во всех параметрах указывают на их принадлежность к
режимам, определяемым наименьшим и наибольшим углами поворота
привода дроссельного крана.
В
процессе
расчета
статической
характеристики
регулятора
определяются следующие параметры: площадь дроссельного крана при
максимальном и минимальном углах поворота привода дроссельного крана;
усилие предварительного натяга и жесткость пружины.
Задаются углом при вершине треугольного окна дифференциального
клапана, площадью поршня дифференциального клапана, плотностью
111
жидкости, а также коэффициентами расхода дроссельного крана и окон
дифференциального клапана.
Для
нахождения
искомых
параметров
и
расчета
статических
характеристик регулятора выводится вначале формула для определения
давления PА в полости за дифференциальным клапаном. Подставив (3.4.7) и
(3.4.8) в равенство (3.4.10) и, раскрыв полученное выражение относительно
PА с учетом (3.4.9), получим
2
2
16 μ дф
(h − x) 4 tg 2 β Pвх + μ др2 ⎡⎣ Fдр (ϕ ) ⎤⎦ Pвых
.
PА =
2
2
4
2
2
16 μ дф (h − x) tg β + μ др ⎡⎣ Fдр (ϕ ) ⎤⎦
(3.4.11)
Если подставить выражение (3.4.11) в одну из формул (3.4.7) или (3.4.8)
имея в виду, что Pвх − Pвых = ΔPр , получим зависимость для расчета
статической характеристики регулятора:
m&
(ϕ )
р
=
4 μдф (h − x) 2 tg β μдр Fдр (ϕ )
16 μ (h − x) tg β + μ ⎡⎣ Fдр (ϕ ) ⎤⎦
2
дф
4
2
2
др
2
2 ρ ΔPр .
(3.4.12)
Статическую характеристику регулятора можно построить, если известны
параметры, входящие в правую часть выражения (3.4.12).
Параметр Fдр (ϕ ) при известном (заданном) перепаде давления на
дроссельном кране ΔPдр = PА − Pвых на главной ступени работы двигателя,
соответствующем ϕ = ϕ max , определяется по полученной из (3.4.8) формуле
Fдр (ϕ 2 ) =
2)
m& (рϕ. НАР
μдр 2 ρ ΔPдр. НАР
.
(3.4.13)
В формулах (3.4.12) и (3.4.13) можно принять
Высота
h
треугольного
окна
μ др = μ дф = 0,65...0,70 .
дифференциального
клапана
определяется из того условия, что регулятор вступает в работу при
Рвх = Рвх.нм ,
)
2)
m& (рϕ. НАР
= m& (рϕ.НАР
,
давлении
в
полости
A
112
регулятора РА = Рвых + ΔРдр. НАР и x = 0 . С учетом указанных условий и
равенства (3.4.9) уравнение (3.4.7) запишется в виде
2)
m& (рϕ. НАР
= 4 μдф h 2 tg β 2 ρ ( Pвх.нм − Pвых − ΔPдр. НАР ) .
(3.4.14)
Задавая угол при вершине треугольного окна дифференциального
клапана, например 2 β = 150 град , из формулы (3.4) можно определить
величину h :
1
2
⎡
⎤
m&
⎥ .
h=⎢
tg
P
P
P
4
μ
β
2
ρ
(
)
−
−
Δ
⎢⎣ дф
вх . нм
вых
др . НАР ⎥
⎦
(ϕ 2 )
р . НАР
(3.4.15)
Для расчета статистической характеристики регулятора по формуле
(3.4.12) неизвестна еще координата дифференциального клапана x , которая
зависит от перепада давления на регуляторе ΔР р . Для нахождения указанной
зависимости можно воспользоваться уравнением баланса сил (3.4.1) на
установившемся режиме работы регулятора, то есть когда в уравнении
производная равна нулю, а давления РБ и РВ равны РБ = РА , РВ = Рвых
(без учета гидродинамической силы N гд =0 ):
N пр + γ прж х = Fn ( PА − Рвых ) .
(3.4.16)
Если подставить в уравнение (3.6) вместо PА его выражение (3.1) и
преобразовать, то можно получить выражение для определения связи между
перепадом давления на регуляторе и ходом дифференциального клапана:
ΔР р =
2
16 μдф
(h − x) 4 tg 2 β + μдр2 ( Fдр (ϕ 2 ) )
2
2
16 μдф
(h − x) 4 tg 2 β Fn
Площадью поршня
соображений
(N
пр
+ γ прж х ) .
(3.4.17)
Fn в равенстве (3.4.17) можно задаться из
реализации
компактной
конструкции,
например
Fn = 15 ⋅10−4 м 2 .
Таким образом, задавая значения x в диапазоне 0… xнб по формуле
(3.4.17) можно построить график x = f (ΔPр ) (рис. 3.4.4).
113
Зависимость, представленная на
рис.
3.4.4,
используется
расчете
при
статической
характеристики регулятора по
формуле
заданного
(ΔP
)
р . НАР max
Рис.
x = f (ΔPP )
3.4.4.
при ϕ
ΔPР.нб
График
= ϕ max
ΔPР
ΔPр
(3.4.12),
когда
перепада
должен
для
давления
быть
задан
зависимости соответствующий
ход
дифференциального клапана x .
Неизвестными в уравнении (3.4.12) еще остаются N пр и γ прж . Для
определения
силы
предварительного
натяга
пружины
N пр
следует
воспользоваться уравнением (3.4.16) баланса сил, действующих на поршень
дифференциального клапана на установившемся режиме работы регулятора в
момент страгивания клапана ( х = 0 ) , а перепад на дроссельном кране равен
ΔРдр = ΔРдр. НАР . Тогда сила предварительного натяга пружины определится
так:
N пр = Fn ΔРдр.НАР .
(3.4.18)
Для определения жесткости пружины нужно вычислить максимальный
ход хнб дифференциального клапана, соответствующий максимальному
перепаду давления на регуляторе ΔPр.нб = Pвх.нб − Pвых . Для расчета хнб
следует воспользоваться формулой (3.4.12), подставляя в нее x = хнб ,
2)
& р = m& (рϕ. НАР
ΔPр = ΔPр.нб , увеличив m
на 10 %, т.е. на величину допустимой
статистической погрешности регулятора
114
1
⎧
4
2)
1,21 μдр2 [ Fдр (ϕ 2 )]2 (m& (рϕ. НАР
)2
⎪
⎪⎫
хнб = h − ⎨
.
(ϕ 2 )
2
2
2
2
2 ⎬
⎪16 μдф tg β {2 μдр [ Fдр (ϕ2 )] ρ ΔPр.нб − 1,21 (m& р. НАР ) } ⎪⎭
⎩
(3.4.19)
Известно, что при увеличении расхода жидкости через дроссель
постоянного сечения на 10 % перепад давления на нем увеличивается
примерно на 20 %, что обусловлено его квадратичной дроссельной
характеристикой. Поэтому, преобразовав формулу (3.6) с учетом того, что
( РА − Рвых ) = 1, 2ΔРдр.НАР , получим:
при x = хнб справедливо равенство
γ прж = (1, 2 Fn ΔPдр. НАР − N пр ) / xнб .
(3.4.20)
Таким образом, для расчета и построения статической характеристики
регулятора по каналу стабилизации необходимо: в формулу (3.4.12)
подставить величины, полученные в результате расчета по формулам
(3.4.13)-(3.4.20) и принятые в качестве исходных данных h, μ др , μ дф ,
ρ, β ,
& р для
парные значения ΔPр и x (из графика на рис. 3.4.4); вычислить m
ϕ = ϕ2
случая
в
диапазоне
перепада
давления
на
регуляторе
2)
ΔPр = 0...ΔPр(.ϕНАР
по формуле
m&
(ϕ 2 )
р
=
4 μдф h 2 tg β μдр Fдр (ϕ2 )
16 μ h tg β + μ ⎡⎣ Fдр (ϕ2 ) ⎤⎦
2
дф
4
2
2
др
2
2 ρ ΔPр .
(3.4.21)
(ϕ )
2
...ΔPр.нб
В диапазоне перепада давления на регуляторе ΔPр = ΔPр. НАР
статическая характеристика регулятора определяется по зависимости
m&
(ϕ 2 )
р
=
4 μдф (h − x) 2 tg β μдр Fдр (ϕ 2 )
16 μ (h − x) tg β + μ
2
дф
4
2
2
др
(F
др
(ϕ2 ) )
2
2 ρ ΔPр . (3.4.22)
(ϕ )
2
легко определить по формуле
Величину ΔPр. НАР
115
2)
ΔPр(.ϕНАР
2
2
(ϕ 2 )
2
4
2
2
⎡
⎤
&
m
16
μ
h
tg
β
μ
F
(
ϕ
)
+
( р.НАР ) ⎢⎣ дф
др ( др
2 ) ⎥
⎦.
=
2
2 ρ ⎡⎣ 4 μдф h 2 tg β μдр Fдр (ϕ2 ) ⎤⎦
(3.4.23)
Статическая характеристика регулятора при минимальном угле поворота
привода дроссельного крана
ϕ = ϕ1 рассчитывается уже при известных,
ϕ = ϕ2 , величинах h, μ др , μ дф , ρ , β , N пр , γ прж . Для
определенных при
этого вначале определяется площадь проходного сечения дроссельного крана
Fдр (ϕ1 ) по формуле
Fдр (ϕ1 ) =
1)
m& (рϕ. НАР
μдр 2 ρ ΔPдр.НАР
,
(3.4.24)
А затем рассчитываются статическе характеристики регулятора при
ϕ = ϕ1 в
(ϕ )
1
следует вести
диапазоне перепада давления на регуляторе ΔPр = 0...ΔPр. НАР
по формуле
m&
(ϕ1 )
р
=
4 μдф h 2 tg β μдр Fдр (ϕ1 )
16 μ h tg β + μ
2
дф
4
2
2
др
(F
др
(ϕ1 ) )
2
2 ρ ΔPр ,
(3.4.25)
(ϕ
1)
а в диапазоне выше ΔPр = ΔPр. НАР
...ΔPр.нб по формуле
m& (рϕ1 ) =
4 μдф (h − x) 2 tg β μдр Fдр (ϕ1 )
2
16 μдф
(h − x) 4 tg 2 β + μдр2 ( Fдр (ϕ1 ) )
2
2 ρ ΔPр . (3.4.26)
(ϕ )
1
определяется аналогично формуле (3.4.23)
Величина ΔPр. НАР
1)
ΔPр(.ϕНАР
2
2
(ϕ1 )
2
4
2
2
⎡
⎤
&
m
16
μ
h
tg
β
μ
F
(
ϕ
)
+
( р.НАР ) ⎢⎣ дф
др ( др
1 ) ⎥
⎦.
=
2
2 ρ ⎡⎣ 4 μдф h 2 tg β μдр Fдр (ϕ1 ) ⎤⎦
(3.4.27)
Соответствие между перепадом давления на регуляторе и ходом
дифференциального клапана можно определить в результате построения
графика (3.2) по формуле
116
ΔР р =
2
16 μдф
(h − x) 4 tg 2 β + μдр2 [ Fдр (ϕ1 )]2
2
16 μдф
(h − x) 4 tg 2 β Fn
(N
пр
+ γ прж х ) . (3.4.28)
Таким образом, в результате
расчета по формулам (3.4.12) –
(3.4.28)
можно
статические
регулятора
характеристики
(рис.
построенным
(ΔP
)
р . НАР min
ΔPР.нб
= ϕ min
3.4.6).
По
статическим
характеристикам регулятора при
ΔPР
Рис. 3.4.5. График зависимости
при ϕ
построить
различных
x = f (ΔPP )
привода
значениях
угла
дроссельного
крана
можно определить, с какой
погрешностью поддерживается заданный расход горючего при изменении
перепада давления на регуляторе ΔPр .
m& р
(m&
р .НАР max
(m&
р .НАР min
m& р. max
)
)
m& р. min
(ΔP
) (ΔP
р . НАР min
)
р . НАР max
ΔPр.нб ΔP
р
Рис. 3.4.6. Статические характеристики регулятора расхода топлива в
режиме стабилизации: нижний график соответствует ϕ1 = const ; верхний
график соответствует ϕ 2
рабочей зоне регулятора
= const ; заштрихованная область соответствует
Известно, что гидродинамическая сила снижает статизм регулятора,
поэтому чтобы оценить насколько она влияет на статическую характеристику
регулятора, необходимо рассчитать ее по приближенным формулам и учесть
117
в уравнении баланса сил (3.4.5). Гидродинамическая сила N гд определяется
по формуле (3.4.2), в которой площадь Fт находится по выражению
Fт = 8Δ дф h sin β , где Δ дф - толщина втулки дифференциального клапана в
месте дросселирования потока жидкости, м. Величина Δ дф задается из
конструктивных соображений, например Δ дф = 3 ⋅ 10
−3
м . Коэффициент
гидродинамической силы сгд можно в первом приближении принять равным
сгд = 0,8 . При расчете скорости потока жидкости по формуле (3.4.3) расход
2)
m& дф следует принять m& дф = 1,1m& (рϕ. НАР
. При указанных допущениях
погрешность расчета N гд будет большая, поэтому эта сила, как правило,
определяется экспериментально [3].
Построенные характеристики на рис. 3.4.6 относятся к режиму
стабилизации работы ЖРД. Для управления тягой ЖРД или ракетой нужно
знать еще характеристику регулятора в режиме управления, то есть
изменение расхода горючего при изменении угла поворота привода
дроссельного крана. Предположим, что такая характеристика задается на
номинальном режиме работы регулятора, соответствующем перепаду
(ϕ )
2
давления на нем ( ΔР р )0 = ⎡⎣ ΔР р. НАР
+ ΔР р.нб ⎤⎦ / 2 = const (см. рис. 3.4.6).
Указанная
характеристика
может
быть
линейной
или
нелинейной.
Нелинейность характеристики используется для изменения коэффициента
передачи
регулятора
с
целью
коррекции
динамических
свойств
(устойчивости) системы ЖРД – регулятор. В первом приближении можно
принять расходную характеристику регулятора линейной, соответствующей
(ϕ )
(ϕ )
& р = m& р 0 + km (ϕ0 − ϕ ) , где m& р 0
рис. 3.4.7 или формуле m
- постоянная
составляющая расхода горючего через дроссельный кран при
ϕ = ϕ0 ,
реализующаяся после срабатывания пиропатрона и перехода регулятора с
режима предварительной ступени тяги ЖРД на главную ступень; km 118
коэффициент передачи привода дроссельного крана, который может быть
(ϕ )
(ϕ )
& р 2 − m& р 1 ) /(ϕ 2 − ϕ1 ) .
назначен из условия km = ( m
m& р
m& р.max
Рис.
3.4.7.
Расходная
характеристика
регулятора
расхода горючего в режиме
управления
(m& )
р 0
m& р. min
ϕ min
ϕ0
ϕ max
ϕ
Fдр (ϕ )
Fдр (ϕ max )
Рис. 3.4.8 - Зависимость площади
проходного сечения дроссельного
крана регулятора от угла поворота
его привода
Fдр (ϕ 0 )
Fдр (ϕ min )
ϕ min
ϕ0
ϕ max ϕ
В формуле (3.4.15) можно принять
ϕ1 = 00 , ϕ2 = 1800 , а значения
m& (рϕ1 ) и m& (рϕ2 ) определить по статической характеристике регулятора при
ΔР р = (ΔР р )0 .
Для реализации характеристики на рис. 3.4.8 необходимо предусмотреть
соответствующее изменение площади дроссельного крана от угла поворота
его привода.
3.5 Расчет динамических характеристик регулятора тяги
Частотные характеристики регулятора тяги используются при оценке
устойчивости систем, построении области их устойчивости в плоскости
одного или двух параметров. Для расчета частотных характеристик
119
регулятора используется выведенная в главе 2 его математическая модель, в
которую входят нелинейные уравнения, в частности для дроссельного крана
и дифференциального клапана. Для линеаризации нелинейных характеристик
можно
воспользоваться
методом
малых
отклонений
в
окрестности
параметров, соответствующих исследуемому режиму работы регулятора.
Система
линеаризованных
дифференциальных
и
алгебраических
уравнений регулятора в малых отклонениях записывается на основе
уравнений его математической модели (3.5.1), (3.5.4)…(3.5.10) (без учета
гидродинамической силы):
⎫
d 2 Δx
d Δx
λ
γ
(
);
Mn
x
F
Р
Р
+
+
Δ
=
Δ
−
Δ
тр
пр
n
Б
В ⎪
dt 2
dt
⎪
d Δm& Б
⎪
LБ
+ ( RБ + RЖ ) Δm& Б = ΔPА − ΔPБ ;
⎪
dt
⎪
d Δm& B
⎪
LB
+ RB Δm& B = ΔPB − ΔPВЫХ ;
⎬,
dt
⎪
Δm& Б = Δm& B ;
⎪
⎪
d Δx
⎪
Δm& B = ρ Fn
dt
⎪
⎪⎭
⎫
⎪
( Fдф )0
2( Pвх − РA )
⎪
⎪
(m& p )0
(m& p )0
Δm& p =
ΔFдр +
Δ
−
Δ
Р
Р
;
[ А
вых ] ⎪
⎪
( PA − Pвых )0
⎡⎣ Fдр (ϕ ) ⎤⎦
⎬.
0
⎪
2( Fдф )0
⎡ ∂Fдр ⎤
⎪
ΔFдф =
Δx; ΔFдр = ⎢
Δϕ ;
⎥
⎪
(h − x)0
⎣ ∂ϕ ⎦ 0
⎪
Δm& дф = Δm& p , (m& дф )0 = (m& p )0
⎪⎭
Δm& дф =
(m& дф )0
Индекс
ΔFдф +
“0”
в
(m& дф )0
(3.5.1)
[ ΔРвх − ΔРА ];
обозначениях
параметров
(3.5.2)
означает,
что
они
соответствуют номинальному (расчетному) значению. Следует отметить, что
номинальные значения расходов на входе в регулятор и на его выходе равны,
& дф )0 = (m& p )0 . В результате преобразований систему уравнений
т.е. ( m
120
(2.3.5.1) можно свести к одному уравнению собственно дифференциального
клапана как колебательного типового звена
d 2 Δx
d Δx
⎡⎣ M n + ρ F ( LБ + LВ ) ⎤⎦ 2 + ⎡⎣λтр + ρ Fn2 ( RБ + RВ + RЖ ) ⎤⎦
+
(3.5.3)
dt
dt
+γ прж x = Fn (ΔPА − ΔPвых ).
2
n
Преобразовав
уравнения
(3.5.2),
можно
получить
два
уравнения
&p:
относительно ΔPА и Δm
ΔPА =
−
( PА − Pвых )0
( Р − РА ) 0
4( Рвх − РА )0 ( РА − Рвых )
ΔРвх + вх
ΔРвых −
Δx −
( Pвх − Рвых )0
( Рвх − Рвых )0
( Рвх − Рвых )(h − x)0
2( Рвх − РА )0 ( РА − Рвых )0 ⎛ ∂Fдр ⎞
⎜
⎟ Δϕ ;
( Рвх − Рвых )0 ( Fдр.к )0 ⎝ ∂ϕ ⎠0
(3.5.4)
Δm& p =
(m& p )0
2( Рвх − Рвых )0
2( Рвх − РА )(m& p )0
( Рвх − Рвых )0 (h − x)0
×
ΔРвх −
Δx +
(m& p )0
2( Рвх − Рвых )0
(m& p )0 ⎛ ∂Fдр ⎞
⎜
⎟ ×
( Fдр )0 ⎝ ∂ϕ ⎠0
ΔРвых −
.
(3.5.5)
( РА − Рвых )0
Δϕ .
( Рвх − Рвых )0
Если подставить выражение для ΔPА из равенства (3.5.4) в формулу
(3.5.3), то получится уравнение дифференциального клапана в составе
регулятора расхода топлива, т.е. с учетом воздействий со стороны входного
ΔPвх и выходного ΔPвых давлений, а также угла поворота привода
дроссельного крана Δϕ др.к
d 2 Δx
d Δx
⎡⎣ M n + ρ F ( LБ + LВ ) ⎤⎦ 2 + ⎡⎣λтр + ρ Fn2 ( RБ + RВ + RЖ ) ⎤⎦
+
dt
dt
⎡
4( Рвх − РА )0 ( РА − Рвых )0 ⎤
Fn ( РА − Рвых )0
(3.5.6)
+ ⎢γ прж +
Δ
=
ΔPвх −
x
⎥
( Рвх − Рвых )0 (h − x)0 ⎦
( Рвх − Рвых )0
⎣
2
n
−
2 F ( Р − РА )0 ( РА − Рвых )0 ⎛ ∂Fдр ⎞
Fn ( РА − Рвых )0
ΔPвых − n вх
⎜
⎟ Δϕ .
( Рвх − Рвых )0
( Рвх − Рвых )0 ( Fдр )0
⎝ ∂ϕ ⎠0
121
Уравнения (3.5.5) и (3.5.6) полностью определяют динамические свойства
регулятора расхода топлива. Разделив равенство (3.5.6) на коэффициент при
Δx можно получить классическое выражение для дифференциального
клапана:
d 2 Δx
d Δx
+
+ Δx = K1 (ΔРвх − ΔРвых ) − K 2 Δϕ ,
2
ζ
T
T
p
dt 2
dt
2
p
⎧
⎪⎪
M n + ρ Fn2 ( LБ + LВ )
Tp = ⎨
4( Рвх − РА )0 ( РА − Рвых )0
⎪ γ прж +
( Рвх − Рвых )0 (h − x)0
⎪⎩
где
(3.5.7)
1
2
⎫
⎪⎪
⎬ ⎪
⎪⎭
постоянная
времени
регулятора расхода, с;
λтр + ρ Fn2 ( RБ + RВ + RЖ )
ζ =
⎧
⎡
4( Рвх − РА )0 ( РА − Рвых )0 ⎤ ⎫
2 ⎨ ⎡⎣ M n + ρ Fn2 ( LБ + LВ ⎤⎦ ⎢γ прж +
⎥⎬
−
−
(
Р
Р
)
(
h
x
)
вх
вых
0
0
⎣
⎦⎭
⎩
1
2
- (3.5.8)
- коэффициент демпфирования;
K1 =
K2 =
Fn ( РА − Рвых )0
⎡
4( Рвх − РА )0 ( РА − Рвых )0 ⎤
( Рвх − Рвых )0 ⎢γ прж +
( Рвх − Рвых )0 (h − x)0 ⎥⎦
⎣
, м/Па;
⎛ ∂Fдр ⎞
2 Fn ( Рвх − РА )0 ( РА − Рвых )0
⎜
⎟ ,
⎡
4( Рвх − РА )0 ( РА − Рвых )0 ⎤ ⎝ ∂ϕ ⎠0
( Рвх − Рвых )0 ( Fдр )0 ⎢γ прж +
( Рвх − Рвых )0 (h − x)0 ⎥⎦
⎣
град/Па
- коэффициенты передачи.
Аналогично можно представить уравнение (3.5.5), вводя новые
принятые обозначения коэффициентов
Δm& p = K 3 (ΔРвх − ΔРвых ) − K 4 Δx + K 5 Δϕ ,
где K 3 =
(m& p )0
2( Рвх − Рвых )0
, кг/(с⋅ Па)
(3.5.9)
(3.5.10)
122
K4 =
K5 =
2( Рвх − РА )0 (m& p )0
( Рвх − Рвых )0 (h − x)0
, кг/(с⋅ м)
(3.5.11)
(m& p )0 ⎛ ∂Fдр ) ⎞ ( РА − Рвых )0
, кг/(с⋅ град)
⎜
⎟
( Fдр )0 ⎝ ∂ϕ ⎠0 ( Рвх − Рвых )0
(3.5.12)
- коэффициенты передачи.
Исследование
воспользоваться
динамических
операторным
методом
свойств
[4].
облегчается,
Для
этого
если
необходимо
представить уравнения (3.5.7) и (3.5.9) в операторной форме:
(Tp2 s 2 + 2Tpζ s + 1)Δx% = K1 (ΔР%вх − ΔР%вых ) − K 2 Δϕ% ,
(3.5.13)
Δm&% p = K 3 (ΔР%вх − ΔР%вых ) − K 4 Δx% + K 5 Δϕ% .
(3.5.14)
Для удобства построения структурной схемы регулятора уравнение (3.5.13)
представим в следующем виде
⎡
⎤
K
Δx% = Wx ( s ) ⎢(ΔР%вх − ΔР%вых ) − 2 Δϕ% ⎥ ,
K1
⎣
⎦
где Wx ( s ) =
K1
, Па/м
Tр2 s 2 + 2Tрζ s + 1
(3.5.15)
(3.5.16)
- передаточная функция дифференциального клапана по перепаду давления.
Структурная схема регулятора, построенная по уравнениям (3.5.14) и
(3.5.15), представлена на рис. 3.5.1.
Рис. 3.5.1. Структурная схема гидромеханического
регулятора тяги прямого действия
123
Если в зависимость (3.5.14) подставить выражение (3.5.15) для Δx% , то
%& от возмущающих ΔР% ,
получится зависимость приращения расхода Δm
p
вх
ΔР%вых и управляющего Δϕ% воздействий:
⎡
⎤
K1 K 4
%
Δm& p = ⎢ K 3 − 2 2
⎥ (ΔР%вх − ΔР%вых ) +
Tр s + 2Tрζ s + 1 ⎦⎥
⎣⎢
⎡
⎤
K2 K4
+ ⎢ K5 + 2 2
⎥ Δϕ% .
T
s
T
s
2
1
+
+
ζ
р
⎣⎢
⎦⎥
Эту же зависимость можно получить в результате
(3.5.17)
преобразования
структурной схемы (см. рис. 3.5.1). Структурная схема позволяет получить
частотные характеристики регулятора и в дальнейшем системы ЖРД –
регулятор с использованием программного комплекса МВТУ [5] или других
пакетов программ моделирования систем.
Из уравнения (3.5.17) следует, что приращение расхода жидкости через
регулятор
определяется
отклонениями
перепада
давления
на
нем
Δ(ΔР р ) = ΔРвх − ΔРвых и угла поворота вала привода дроссельного крана
Δϕ . Если условно принять Δ(ΔР р ) за возмущающее воздействие,
& p , то при
приводящее к отклонению выходного параметра регулятора Δm
s = 0 разность коэффициентов K3 − K1 K 4 определяет статизм регулятора,
т.е. его статическую погрешность.
Действие регулятора по поддержанию заданного значения
m& p
проявляется в движении дифференциального клапана, что отразится в
отрицательном знаке составляющей K1 K 4 /(Tp s + 2Tpζ s + 1) в выражении
2 2
(3.5.17). Поэтому можно принять произведение коэффициентов K1 K 4 за
коэффициент усиления регулятора, т.е.
K p = K1 K 4 . Отсюда следует
классическая формулировка, что чем больше коэффициент усиления K p , тем
124
меньше статизм K 3 − K p и соответственно будет меньше статическая
ошибка регулирования. Если K 3 − K p = 0 , то такой регулятор называют
астатическим, для действия которого в системе характерен колебательный
переходный процесс и меньший запас устойчивости. В дальнейшем при
расчетах вместо произведения K1 K 4 будет использоваться коэффициент
усиления регулятора K p .
Из уравнения (3.5.17) можно получить передаточные функции
регулятора, соответствующие режимам стабилизации и управления. В
режиме стабилизации регулятор стремится поддерживать заданный расход
жидкости независимо от перепада давления Δ ( ΔР% р ) = ΔР% вх − ΔР%вых и для
данного режима передаточная функция будет равна (при предположении
Δϕ%др.к = 0 ):
Δm%& p
Kp
WΔ ( s ) =
= K3 − 2 2
Δ(ΔP%p )
Tp s + 2Tpζ s + 1
(3.5.18)
В режиме управления расход жидкости на выходе из регулятора будет
пропорционален углу поворота дроссельного крана (при предположении
Δ(ΔPp ) = 0 ) и для этого режима передаточная функция имеет вид:
Δm%& p
K K
Wϕ ( s ) =
= K5 + 2 2 2 4
Δϕ%
Tp s + 2Tpζ s + 1
(3.5.19)
Используя выражения (3.5.18), (3.5.19) можно построить частотные
характеристики регулятора расхода и оценить его динамические свойства по
компенсации влияния колебаний перепада давления на нем и возможности
управления расходом жидкости. Для этого используются частотные функции
WΔ ( jω ) = K 3 −
Kp
(1 − T ω ) + j 2Tpζω
2
p
2
,
(3.5.20)
125
Wϕ ( jω ) = K 5 +
K2 K4
(1 − Tp2ω 2 ) + j 2Tpζω
(3.5.21)
Математическая модель регулятора, в частности выражение (3.5.17)
может быть использована для оценки динамических свойств не только
системы ЖРД – регулятор, но и других объектов регулирования, например
энергетической или технологической установки с рассмотренным типом
регулятора расхода жидкости.
Изложенная выше линеаризованная модель регулятора расхода топлива
дает возможность в первом приближении выбрать его параметры и
рассчитать его динамические характеристики. Однако, известно, что
практически любой агрегат имеет элементы с нелинейными статическими
характеристиками. Если имеется такой элемент, то необходимо оценить
влияние нелинейности его характеристики на расслоение частотных
зависимостей регулятора расхода топлива. Такая оценка необходима в связи
с жесткими требованиями к ЖРД как исполнительному органу в системе
управления и стабилизации полетом ракеты.
Существенно нелинейными элементами, приводящими к расслоению
статических и частотных характеристик регулятора, являются подвижные
элементы с сухим трением, гидравлические дроссели. Из анализа расчетной
схемы регулятора (см. рис. 2.1) следует, что в нем нелинейным элементом
является
демпфирующий
жиклер
в
цепи
передачи
давления
к
дифференциальному клапану. Как показывают экспериментальные данные,
полученные в широком диапазоне перепадов давлений на демпфирующем
жиклере
реализуется
турбулентный
режим
движения
жидкости,
соответствующий квадратичному закону гидравлических потерь (рис. 3.5.2).
На рис. 3.5.2 обозначены: ΔРж - перепад давления жидкости на
& ж - массовый расход жидкости через жиклер.
жиклере; т
126
В таких малопроточных цепях возникают эффекты, приводящие к
зависимости статических и частотных характеристик регулятора от величины
и формы входного воздействия.
Рис. 3.5.2. Зависимость гидравлического сопротивления жиклера
регулятора расхода от расхода жидкости
Если в тупиковой цепи с демпфирующим жиклером существует
постоянный проток жидкости, например из-за наличия зазоров в подвижных
элементах
дифференциального
клапана,
то
он
будет
способствовать
линеаризации дроссельной характеристики жиклера.
В настоящее время разработана методика уточненного расчета,
позволяющая оценить отклонение частотных характеристик регулятора
расхода топлива при изменении амплитуды перепада давления на нем, а
также дать рекомендации по организации постоянного протока жидкости
через
демпфирующий
жиклер
для
обеспечения
линейности
его
характеристики [46].
Так как жидкость втекает через жиклер в тупиковую полость, утечки
из которой малы, то жиклер можно отнести к существенно нелинейному
элементу
регулятора.
Для
этого
случая
метод
малых
отклонений
неприменим. Достаточно точные результаты при расчете частотных
характеристик регулятора с таким жиклером дает метод гармонической
линеаризации.
Условием
для
применения
метода
гармонической
линеаризации или гармонического баланса является то, что линейная часть
127
исследуемого агрегата должна обладать свойствами низкочастотного
фильтра. Исследуемый регулятор расхода топлива относится именно к таким
объектам.
При задании синусоидальных колебаний расхода жидкости через
жиклер на нем будут реализовываться полигармонические колебания
′ , kнл′′ перепада давления (рис.3.5.3). На рис. 3.5.3 обозначены: kнл
коэффициенты гидравлических потерь при движении жидкости в одну и
другую стороны. При гармонической линеаризации характеристики жиклера
учитываются лишь первые гармоники колебаний перепада давления на нем,
определяемые в результате разложения последнего в ряд Фурье.
Рис.3.5.3.
Иллюстрация
к
пояснению метода гармонической
линеаризации
характеристики
демпфирующего
жиклера
регулятора
Известно,
что
наибольшее
влияние
нелинейности
жиклера
на
характеристику регулятора наблюдается в случае, когда отсутствуют
линейные гидравлические потери в цепи жиклера и утечки через зазоры в
щелях дифференциального клапана, то есть когда в уравнениях (2.4) и (2.5)
RБ = 0; Rж = 0 . С учетом принятого условия равенства
(2.4) и (2.5)
можно представить в виде
LБ
dm& Б
+ kнл m& Б m& Б = PА − PБ .
dt
(3.5.22)
После гармонической линеаризации зависимости (3.5.22) будем иметь
LБ
dm& Б
+ bж m& Б = PА − PБ ,
dt
(3.5.23)
где
128
bж =
8kнл
Ат& ж
3π
(3.5.24)
- коэффициент гармонической линеаризации характеристики жиклера.
Так как утечки жидкости через зазоры дифференциального клапана не
учитываются, то амплитуда колебаний расхода жидкости через жиклер будет
связан с амплитудой колебаний поршня дифференциального клапана
зависимостью
Ах =
1
Ат& .
jω Fп ж
(3.5.25)
Предположим, что гармонические колебания задаются только за счет
изменения давления на входе в регулятор ΔРвх = Авх , а давление на выходе
из регулятора постоянно. Кроме того, допустим, что привод дроссельного
крана неподвижен. С учетом принятых условий уравнение (3.5.13) после
перехода к частотной форме перепишется в виде
(1 − Tp2ω 2 + j 2Tpζω + 1) Ах е jϕ х = K1 АРвх е
jϕ Рвх
λтр + ρ Fn2 ( RВ +
где ζ =
,
(3.5.26)
8kнл
Ат& ж )
3π
⎧
⎡
4( Рвх − РА )0 ( РА − Рвых )0 ⎤ ⎫
2 ⎨ ⎡⎣ M n + ρ Fn2 ( LБ + LВ ⎤⎦ ⎢γ прж +
⎥⎬
(
)
(
)
−
−
Р
Р
h
x
0
0
вх
вых
⎣
⎦⎭
⎩
Ах , ϕ х
-
амплитуда
и
начальная
фаза
колебаний
1
2
;
поршня
дифференциального клапана.
Из совместного решения уравнений (3.5.25), (3.5.26) можно определить
величины Ах ,
ϕ х , то есть вектор ΔХ = Ах еϕ , после подстановки которого
х
в (3.5.9) (записанного в векторной форме), получим
Δm& p = K 3 ΔРвх − K 4 Δx .
(3.5.27)
Решение уравнений (3.5.25), (3.5.26) для определения амплитуды и
начальной фазы колебаний поршня проводится, как правило, методом
129
последовательного приближения. В первом приближении при bж = 0
определяется амплитуда
Ах , которая подставляется в выражение для
коэффициента гармонической линеаризации (3.5.24) и с этим значением bж
находят Ах второго приближения. Расчет ведется до тех пор, пока разница в
значениях Ах двух последовательных приближений не станет меньше
допустимой величины.
Из (3.5.27) можно определить частотную функцию регулятора с
жиклером, обладающим нелинейной расходной характеристикой
W р ( jω ) =
Δm& p
ΔРвх
= K3 − K 4
Ах е jϕ х
АРвх е
jϕ Рвх
.
3.6 Оценка устойчивости системы «ЖРД-регулятор тяги»
и выбор параметров регулятора
Для составления уравнения системы ЖРД - регулятор тяги необходимо
помимо уравнений регулятора иметь зависимости для объекта, причем такие
&p.
уравнения, которые были бы замкнуты на параметры ΔРвх , ΔРвых и Δm
Применительно к изучаемой системе нужно связать расход через
регулятор, как входной параметр объекта регулирования (ЖРД), с
выходными его параметрами
ΔРвх и ΔРвых . Известно, что компонент
горючее подается в газогенератор и изменение этого расхода может привести
к изменению давления ΔРвых . Учитывая сложность динамических процессов
в ЖРД, примем допущение о том, что давление в газогенераторе постоянное,
а изменение энергии потока газа на его выходе связано в основном с
изменением температуры. Тогда можно связать давление на выходе из
регулятора ΔРвых
&p
с расходом Δm
уравнением граничных условий,
определяемым перепадом давления на форсунках газогенератора:
m& p = μф.гг Fф.гг Рвых − Ргг ,
(3.6.1)
130
где
μ ф.гг , Fф.гг - коэффициент расхода и площадь проходного сечения
форсунок газогенератора, м2; Ргг - давление в газогенераторе, Па.
В
результате
линеаризации
уравнения
(3.6.1)
методом
малых
отклонений при условии Ргг = const можно получить:
ΔPвых = K 6 Δm& р ,
где
(3.6.2)
К 6 = 2 ( Pвых − Pгг )0 / ( m& р ) –
0
коэффициент
передачи
топливных
форсунок газогенератора, Па⋅с/кг.
На вход регулятора топливо подается дополнительным центробежным
насосом, ротор которого жестко связан и вращается вместе с ротором ТНА.
Известно, что основной характеристикой центробежного насоса является его
напорная характеристика, выражающая связь давления на его выходе (или на
входе в регулятор) с частотой вращения и расходом жидкости. С точки
зрения динамических свойств насоса и регулятора можно с уверенностью
полагать, что сопротивление насоса (со стороны выхода) мало по сравнению
с сопротивлением регулятора, на котором дросселируется большой перепад
давления. В связи с этим можно считать, что давление на выходе из насоса
слабо зависит от расхода жидкости и в основном определяется частотой
вращения его привода. При таком допущении ЖРД как объект регулирования
по каналу, связывающему расход горючего в газогенераторе с давлением на
выходе из дополнительного центробежного насоса или на входе в регулятор
расхода, можно описать уравнением апериодического типового звена
ΔP%вх = Wдв ( s ) Δm%& p ,
где Wдв ( s ) =
(3.6.3)
K дв
– передаточная функция двигателя, Па⋅с/кг; K дв –
Tдв s + 1
коэффициент передачи, Па⋅с/кг;
Tдв - постоянная времени двигателя как
объекта регулирования по внутренним двигательным параметрам, с. На
131
такую же форму описания процессов указывают и экспериментальные
характеристики ЖРД без регулятора [2].
Для исследования устойчивости САР ЖРД – регулятор топлива
необходимо определить её передаточную функцию по управляющему
воздействию.
Передаточную
функцию
САР
можно
определить,
воспользовавшись уравнениями (4.13), (4.14), (3.6.), (3.6.3) или по
структурной схеме системы ЖРД – регулятор (рис. 3.6.1).
Рис. .3.6.1. Структурная схема системы ЖРД – регулятор
Если выбрать в качестве выходного параметра САР приращение
%& , то после преобразований (4.13), (4.14), (3.6.), (3.6.3)
расхода топлива Δm
p
будем иметь:
[ K 5 (T 2 p s 2 + 2Tpζ s + 1) + K 2 K 4 ](Tдв s + 1) ⋅
Δm%& p =
⎧⎪(T 2 p s 2 + 2Tpζ s + 1)[(1 − K 3 K 6 )(Tдв s + 1) + ⎫⎪
⋅⎨
⎬
⎪⎩+ K 3 K дв ] − K p K дв + K p K 6 (Tдв s + 1)]
⎪⎭
−1
Δϕ% .
(3.6.4)
После приведения уравнения (3.6.4) к стандартному виду, можно
получить
Δm%& p = WЖРД − Р ( s )Δϕ% ,
132
где WЖРД-Р (s) = B(s)/D(s) – передаточная функция системы ЖРД –
регулятор,
B( s ) = b0 s 3 + b1s 2 + b2 s + b3 –
оператор
управляющего
воздействия,
D( s ) = a0 s 3 + a1s 2 + a2 s + a3
(3.6.5)
- собственный оператор системы регулирования.
В выражениях для B(s) и D(s) – коэффициенты членов полинома равны:
b0 = K 5Tp 2Tдв ;
b1 = K 5 (2Tдвζ + Tр )Т р ;
b2 = ( K 5 + K 2 K 4 )Tдв + 2 K 5Tpζ ;
(3.6.6)
b3 = K 5 + K 2 K 4 ;
a0 = (1 + K 3 K 6 )Tp 2Tдв ;
a1 = 2(1 + K 3 K 6 )TдвTрζ + [1 + K 3 ( K 6 − K дв )]Tр2 ;
a2 = [1 + K 6 ( K 3 − K p )]Tдв + 2[1 + K 3 ( K 6 − K дв )]Tpζ ;
(3.6.7)
a3 = 1 + ( K 3 − K p )( K 6 − K дв ).
ЖРД как исполнительный элемент системы управления ракетыносителя (см. рис. 1.1) также описывается уравнением апериодического звена
и здесь выходным параметром системы является тяга двигателя Рдв ,
& p . Однако в данном учебном пособии рассматривается
пропорциональная m
только часть системы управления, а именно ЖРД - регулятор.
При определенных сочетаниях параметров двигателя и регулятора
система ЖРД - регулятор может потерять устойчивость. Для стабилизации
системы необходимо изменять ее параметры или структуру. В принципе,
возможно изменение параметров двигателя и регулятора. Однако на практике
идут по пути наименьших затрат – изменяют параметры регулятора, причем
такие параметры, которые не затрагивают корпусные или другие сложные
его элементы.
133
Анализ
устойчивости
систем
регулирования
удобно
проводить
методом D-разбиения [3], который позволяет выделить области изменения
параметров, соответствующие устойчивой системе.
Области устойчивости в плоскости одного или двух параметров
строятся на основе собственного оператора, приравнивая его к нулю, то есть
при D(s)=0 или
a0 s 3 + a1s 2 + a2 s + a3 = 0 .
(3.6.8)
В коэффициенты собственного оператора входят параметры, в
плоскости которых строится D-разбиение. Легко изменяемым параметром
регулятора является коэффициент демпфирования ζ, поэтому целесообразно
строить D-разбиение в плоскости этого параметра. Для этого необходимо
приравнять к нулю собственный оператор и выделить в нем в явном виде
коэффициент демпфирования ζ. После этих действий можно получить:
β 0 s 3 + β1s 2 + β 2 s + β 3 + ( β 4 s 2 + β 5 s )ζ = 0,
(3.6.9)
β 0 = (1 + K 3 K 6 )Tp 2Tдв ;
β1 = [1 + K 3 ( K 6 − K дв )]Tp 2 ;
где
β 2 = [1 + K 6 ( K 3 − K р )]Tдв ;
β 3 = 1 + ( K 3 − K р )( K 6 − K дв );
β 4 = 2(1 + K 3 K 6 )TдвTp
β 5 = 2[1 + K 3 ( K 6 − K дв )]Tp .
Из равенства (3.6.9) следует:
β 0 s 3 + β1s 2 + β 3 s + β 3
.
ζ =−
β 4 s2 + β5 s
(3.6.10)
Для построения D-разбиения в плоскости параметра ζ необходимо в
(3.6.10) подставить s = jω и выделить в нем действительную и мнимую
части:
( β 3 − β1ω 2 ) + jω ( β 2 − β 0ω 2 )
= Re ζ + jJmζ ,
ζ =
β 4ω 2 − j β 5ω
134
где
β 4ω 2 ( β3 − β1ω 2 ) − β5ω 2 ( β 2 − β 0ω 2 )
Re ζ =
( β 4ω 2 ) 2 + ( β5ω ) 2
(3.6.11)
- вещественная часть коэффициента ζ ,
β 4ω 3 ( β 2 − β 0ω 2 ) + β 5ω ( β3 − β1ω 2 )
Jmζ =
( β 4ω 2 ) 2 + ( β 5ω ) 2
(3.6.12)
- мнимая часть коэффициента ζ .
Задаваясь рядом значений частоты
ω , определяют по выражениям
(3.6.11) и (3.6.12) Re ζ и Jmζ , а затем строят границу D-разбиения в
комплексной плоскости
ζ . При этом за максимальное значение частоты, до
которой нужно вести расчеты, можно принять ω max ≈ 10 / Tp .
Штриховку границы D-разбиения производят с левой стороны по мере
возрастания частоты ω [49]. Переход с заштрихованной стороны границы Dразбиения
в
незаштрихованную
будет
означать
переход
корня
характеристического уравнения из левой полуплоскости корней в правую, то
есть система станет неустойчивой. Исходя из указанного условия, в
плоскости ζ выделяют область с наибольшим числом корней в левой
полуплоскости,
и
данная
область
является
областью
возможной
устойчивости. Выбирая какое-либо значение параметра Re ζ из выделенной
таким образом области, подставляют его в коэффициенты собственного
оператора и проверяют устойчивость системы по какому-либо из критериев
устойчивости. Для системы с уравнением третьего порядка наиболее
простым является критерий устойчивости Рауса–Гурвица. Для устойчивости
системы по данному критерию необходимо и достаточно, чтобы при
положительных значениях коэффициентов a0 , a1 , a2 , a3 удовлетворялось
неравенство:
a1a2 − a0 a3 > 0 .
(3.6.13)
135
Если удовлетворяется неравенство (3.6.13), то это означает, что
выделенная область является областью устойчивости, то есть при всех
ζ,
взятых из этой области, система ЖРД – регулятор будет устойчива. Если же
неравенство (3.6.13) не выполняется, то система является структурно
неустойчивой, то есть нельзя такую систему сделать устойчивой простым
изменением
коэффициентов,
а
требуется
введение
корректирующих
элементов или изменения структуры системы.
Известно, что если в структуре системы регулирования присутствует
консервативное звено, то есть колебательное типовое звено с нулевым
демпфированием ( ζ = 0 ), то при порядке собственного оператора меньше
четырех система будет структурно неустойчивой. Для данного случая, то
есть когда n = 3 и ζ = 0 ,
коэффициенты собственного оператора будут
равны:
a0 = (1 + K 3 K 6 )Tp2Tдв ;
a1 = [1 + K 3 ( K 6 − K дв ) ]Tp2 ;
a2 = [1 + K 6 ( K 3 − K p )]Tдв ;
a3 = 1 + ( K 3 − K p )( K 6 − K дв ) .
Подстановка
коэффициентов
в
неравенство
(3.6.13)
и
его
преобразование дает
a1a2 − a0 a3 = − K p K двTp2Tдв < 0 ,
т.е. система является неустойчивой, причем при любых положительных
величинах K p , K дв , Tр , Tдв . Из этих соображений следует, что коэффициент
демпфирования должен быть больше нуля, причем с определенным запасом.
Запас устойчивости необходим для обеспечения устойчивости системы в
условиях принятых упрощающих допущений
в математической модели
регулятора, технологического разброса размеров при изготовлении деталей и
отклонения в работе системы от расчетного режима.
136
Для того чтобы оценить влияние режима работы системы ЖРД –
регулятор на ее устойчивость, необходимо построить D-разбиение для
нескольких режимов, характеризующихся соответствующими номинальными
& p )0 ,
значениями параметров, например ( m
( Рвх − Рвых )0 .
При известном значении коэффициента демпфирования ζ , при
котором система ЖРД - регулятор устойчива, можно по формуле (4.8)
определить, задавшись рядом параметров, требуемое гидравлическое
сопротивление жиклера RЖ и далее его размеры, например его диаметр
проходного сечения
dЖ
128μ l Ж 14
=(
) , м.
π RЖ
(3.6.14)
Таким образом, реализовав требуемые геометрические параметры
жиклера, можно обеспечить устойчивость системы ЖРД – регулятор, причем
с определенным запасом. Однако при выбранных параметрах регулятора не
всегда удается удовлетворить качеству переходного процесса. В этом случае
желательно иметь еще хотя бы один варьируемый параметр регулятора. В
качестве такого параметра часто используется коэффициент усиления
регулятора K p , а через него и другой физический параметр, например,
жесткость пружины
γ прж , площадь поршня Fn регулятора или какой-либо
режимный параметр. Такой подход реализуется построением D-разбиения в
плоскости двух параметров, например ζ и K p . Для такого построения
искомые параметры ζ и K p выделяются в собственном операторе в явном
виде:
(ψ 1s + ψ 5 s )ζ − (ψ 4 s + ψ 7 ) K p + (a0 s 3 + ψ 2 s 2 + ψ 6 ) = 0 ,
(3.6.15)
где
ψ 1 = 2(1 + K 3 K 6 )TдвTp ;
ψ 2 = [1 + K 3 ( K 6 − K дв )]Tp2 ;
137
ψ 3 = (1 + K 3 K 6 )Tдв ;
ψ 4 = K 6Tдв ;
ψ 5 = 2 [1 + K 3 ( K 6 − K дв ) ]Tp ;
ψ 6 = 1 + K3 ( K 6 − K дв ) ;
ψ 7 = K 6 − K дв .
Заменив в (3.6.15) s = jω и прировняв к нулю действительную и мнимую
части, можно получить:
ψ 1ω 2ζ + ψ 7 K p = ψ 6 − ψ 2ω 2
⎫⎪
⎬.
ψ 5ωζ − ψ 4ω K p = ω (ψ 3 − a0ω 2 ) ⎪⎭
(3.6.16)
Из решение системы из двух уравнений с двумя неизвестными ζ и K p
следует
Kp =
Δζ
ΔK
, ζ =
,
Δ
Δ
где
⎛ψ 1ω 2
Δ=⎜
⎝ ψ 5ω
(3.6.17)
ψ7 ⎞
2
⎟ = −ω (ψ 5ψ 7 + ψ 1ψ 4ω ) - определитель системы
−ψ 4ω ⎠
уравнений,
⎛ψ 1ω 2
ΔK = ⎜
⎝ ψ 5ω
(ψ 6 − ψ 2ω 2 ) ⎞
2
2
2
(
)
(
),
=
−
−
−
ψ
ω
ψ
a
ω
ψ
ψ
ψ
ω
⎟
1
3
0
5
6
2
−ω (ψ 3 − a0ω 2 ) ⎠
⎛ψ6
−ψ 2ω 2 ⎞
Δζ = ⎜
= −ψ 4ω (ψ 6 − ψ 2ω 2 ) + ψ 7ω (ψ 3 − a0ω 2 ) .
2⎟
⎝ −ω ψ 3 − a0ω ⎠
В результате подстановки выражений
Δ , Δζ и Δ K в (3.6.17) можно
получить
ψ 5 (ψ 6 − ψ 2ω 2 ) + ψ 1ω 2 (ψ 3 − a0ω 2 )
Kp =
,
ψ 5ψ 7 + ψ 1ψ 4ω 2
(3.6.18)
138
ψ 4 (ψ 6 − ψ 2ω 2 ) − ψ 7 (ψ 3 − a0ω 2 )
ζ =
.
2
ψ 5ψ 7 + ψ 1ψ 4ω
Задаваясь рядом значений
(3.6.19)
ω от 0 до ±ω max можно построить D-
разбиение системы регулирования в плоскости двух параметров ζ и K p .
Штриховку границы D-разбиения производят с левой стороны по мере
увеличения частоты
ω , если определитель Δ > 0 , и с правой стороны, если
Δ < 0 . В плоскости двух параметров ζ и K p
выделяют еще особую
прямую, если Δ = 0 . Для рассматриваемого случая Δ = 0 при
поэтому, подставив в выражения (3.6.18) и (3.6.19)
ω = 0,
ω = 0 и решив их
совместно, можно получить
ζ =
ψ4
Kp.
ψ5
Особая прямая, полученная при
стороны, а при
(3.6.20)
ω = 0 , заштриховывается с одной
ω ≠ 0 - заштриховывается двойной штриховкой, причем
особая прямая и граница D-разбиения должны быть обращены друг к другу
обоюдно заштрихованными или обоюдно не заштрихованными сторонами.
Области возможной устойчивости системы выделяются по той же
методике, что и для D-разбиения в плоскости одного параметра. Затем, взяв
из выделенной области возможной устойчивости два значения параметров ζ
и K p , подставляют их в собственный оператор системы и по одному из
критериев проверяют устойчивость системы. Если она оказалась устойчивой,
то выделенная область является областью устойчивости системы в плоскости
параметров ζ и K p . Если она оказалась неустойчивой, то это указывает на
то, что система является структурно неустойчивой.
3.7 Регулирование соотношения компонентов в ЖРДУ
Для обеспечения заданного режима работы двигательной установки и
получения требуемого закона изменения скорости ракеты по времени полета
139
необходимо регулировать,
кроме
тяги установки,
еще соотношение
компонентов, подаваемых в камеру и в ЖГГ и другие параметры (давление
наддува баков, работу рулевых двигателей и т. д.) [11, 14].
В двигательных установках баллистических ракет одной из основных
является система управления соотношением компонентов. Назначение ее
поддерживать
пределах
и
соотношение
обеспечивать
расходов
компонентов
одновременную
в
выработку
установленных
баков
обоих
компонентов. Вследствие действия ускорения на систему подачи и
связанного с этим различия напоров на входе в насосы, а также вследствие
изменения плотности компонентов при изменении их температуры и
возможной нестабильности характеристик насосов, действительные расходы
компонентов отличаются от номинальных (расчетных). Это может привести
к отклонению соотношения компонентов от расчетного и неодновременному
опорожнению баков, т. е. к неполному использованию компонентов. В
результате уменьшается скорость в конце активного участка полета.
Системы
регулирования
соотношения
компонентов
топлива
обычно
основываются либо на измерении уровней компонентов в баках, либо на
измерении секундных расходов топлива (рис 3.7.1,а и б).
На рис. рис 3.7.1,а а показан пример системы опорожнения баков
(СОБ), основанный на измерении уровней компонентов в баках. Датчики 5
уровня топлива в баках дают сигнал о выработке компонента в счетнорешающую систему 4. От системы сигналы поступают на дроссельные
регуляторы 2, которые, дросселируя расход того или иного компонента,
обеспечивают
заданное
соотношение
расходов
компонентов
и
одновременное опорожнение баков. Для реализации режима одновременного
опорожнения баков обычно целесообразно устанавливать дроссельный
регулятор только на линии
140
Рис.
3.7.1.
Схемы
систем
управления
соотношением
компонентов: а - система с
замером уровней компонентов в
баках;
б
система
с
расходомерами; 1 камера; 2
дроссельные
регуляторы;
З
источник энергии; 4 счетнорешающее устройство; 5 —
датчик уровня топлива в баках;
б— расходомеры
подачи одного из компонентов, расход которого меньше (рис 3.7.1,б). При
этом расход одного из компонентов с помощью дроссельного регулятора 2
«подстраивается» к расходу второго компонента.
Так как процесс изменения соотношения компонентов и его
поддержания
на
заданном
уровне
является
относительно
медленноменяющимся, то и требования по динамическим характеристикам
такой системы менее жесткие, например, по отношению к системе
регулирования
тяги
двигателя.
Поэтому
при
разработке
системы
регулирования соотношения компонентов топлива достаточно удовлетворить
в основном требования по точности статических характеристик и в данном
разделе вопросы по динамике таких систем не рассматриваются.
3.8 Дроссель системы автоматического опорожнения баков
Дроссель системы опорожнения баков (СОБ) является исполнительным
органом системы автоматического опорожнения баков ракеты. Изменяя
расход
горючего
в
камеру
сгорания
двигателя
путем
изменения
гидравлического сопротивления магистрали, дроссель изменяет соотношение
расхода компонентов топлива через двигатель.
141
Управление дросселем производится с помощью электромеханического
исполнительного элемента по сигналам от системы СОБ ракеты.
Рассмотрим конструктивную схему дросселя двух компонентного ЖРД
с насосной подачей компонентов и дожиганием НК-33, представленную на
рис 3.8.1.
Рис. 3.8.1. Конструктивная схема дросселя системы синхронного опорожнения баков: 1 —
жиклер; 2 — корпус; 3 — уплотнение; 4 — крышка; 5 — регулировочный винт; 6
— гайка; 7 — золотник; 8 — пружина; 9 — втулка; 10 — гайка; 11 — шпилька; 12
— втулка; 13 — гайка; 14 — игла; 15 — шпилька; 16 — корпус; 17 — гайка; 18 —
кольцо; 19 — фильтр; 20 — втулка; 21 — золотник; 22 — втулка; 23 — золотник;
24 — регулировочный винт; 25 — втулка; 26 — пружинное кольцо; 27 —
распорная шайба; 28 — манжета; 29 — регулировочная шайба; 30 — пружина; 31
— шарик; 32 — стопор; 33 — рейка; 34 — втулка; 35 — уплотнительное кольцо;
36 — гайка; 37 — поводок; 38 — гайка; 39 — стопор; 40 — уплотнение; 41 —
регулировочная шайба
Основные технические данные дросселя:
1 Перепад давления на дросселе, приведенный к расходу 150 кг/с при плотности
горючего 856 кг/м3:
α=63°
ΔР*=21,7 кгс/см2,
α=90°
ΔР*=52,2 кгс/см2,
142
ΔР*=85,2 кгс/см2.
α=117°
2
3
4
дросселя
Угол поворота приводного вала....................................................................... 54°
Максимальное давление на входе....................................................... 430 кгс/см2
Крутящий момент, необходимый для поворота или удержания приводного вала
2 кгсм
Дроссель состоит из корпуса, узла иглы и механизма привода узла
переключателя. Стальной корпус 2 имеет центральное тело с двумя окнами.
Кроме того, в центральном теле выполнены четыре канала
к
и два
резьбовых отверстия, в которых установлены жиклеры 1 настройки
гидравлической характеристики дросселя. Для обеспечения жесткости
корпуса центральное тело связано со стенками четырьмя ребрами. Со
стороны выхода корпус имеет фланец со шпильками 15 для крепления
клапана, а на боковой поверхности – прилив для крепления прибора
управления.
Узел иглы состоит из иглы 14, рейки 33 и элементов гидравлического
усилителя. Игла 14 центрируется в цилиндрической расточке корпуса двумя
поясками
р
и в крышке 4 – через втулку 12. Игла 14 изготовлена из
алюминиевого сплава. Игла 14 имеет два профиля, которые вместе с окнами
корпуса образуют кольцевые щели в, определяющие площадь проходного
сечения дросселя. Профили на игле выполнены для обеспечения заданной
гидравлической характеристики дросселя.
Рейка 33 преобразует вращательное движение приводного вала 43 в
поступательное движение иглы 14. При вращении вала 43 рейка 33
перемещается во втулке 20, которая запрессована в корпус 2.
Механическая связь рейки 33 с иглой 14 осуществляется через
регулировочный винт 24 и втулку 25. Для контровки регулировочного винта
24 имеется шариковый, замок, состоящий из стопора 32, шарика 31 и
пружины 30. Пружина 30 с помощью конуса на стопоре 32 удерживает
шарик 31 в одной из впадин шлицов, выполненных в рейке 33.
Гидроусилитель
гидродинамических
разгружает
сил,
вал
действующих
43
на
механизма
иглу
14.
привода
от
Гидроусилитель
золотникового типа состоит из исполнительного поршня, чувствительного
143
элемента, регулирующего устройства. Исполнительным поршнем является
игла 14 с полостями: командной м; сливной г, переключателя д.
Чувствительный элемент – золотниковая пара проточного типа,
состоящая из золотника 21, пружины 23 и втулки 22.
Фильтр 19 предназначен для фильтрации горючего, проходящего через
золотниковую пару. Он состоит из латунного корпуса, на который напаяны
стальная каркасная сетка со стороной ячейки 0,4 мм и бронзовая
фильтрующая сетка со стороной ячейки 0,056 мм.
Регулирующее устройство – переключатель компенсирует величину
осевой составляющей гидродинамической силы, действующей на иглу 14,
при её положении в корпусе, соответствующем по лимбу поводка 37 более
100°. Переключатель состоит из корпуса 16, золотника 7, втулки 9 и
пружины 8. Втулка 9 запрессована в корпус 16, который ввернут в иглу 14.
Золотник 7 соединен с регулировочным винтом 5, который ввернут в крышку
4 и законтрен гайкой 6.
Механизмы привода состоит из приводного вала 43 и поводка 37,
Приводной вал выполнен заодно с шестерней и установлен на двух
радиальных шарикоподшипниках 42 и 44. Осевой люфт вала регулируется
шайбой 45. Осевая сила, действующая на приводной вал воспринимается
упорным шарикоподшипником 41, который установлен во втулку 34.
Поводок 37 соединяется с валиком 43 шлицевым соединением и
крепится гайкой 38. Для соединения с прибором управления поводок
дросселя имеет два выступа С. На боковой поверхности поводка имеется
лимб с ценой деления 2° и диапазоном измерения от 0° до 200°. При
номинальном положении иглы 14 в корпусе 2, что соответствует 90° по
лимбу, поводок 37 застопорен стопором 33.
Изменение гидравлического сопротивления магистрали горючего
производится в дросселе за счет изменения площади кольцевых щелей при
перемещении иглы 14 в осевом направлении. При обтекании иглы 14
горючим создается гидродинамическая сила, осевая составляющая которой
144
перемещает иглу в пределах зазоров, суммарная величина которых
устанавливается регулировочной шайбой 29 и образует щель между
кромками золотника 21 и втулки 22.
Горючее из полости а высокого давления через отверстия о,
фильтрующую сетку, отверстия в фильтре, кольцевую щель l проходит в
командную полость М, а затем через жиклер Н и отверстия
б
выходит в
полость низкого давления Л. При изменении ширины щели l величина
давления в командной полости М может меняться от значений давления в
полости Л (щель l закрыта) до величины давления в полости а (щель l
полностью открыта). При увеличении давления в командной полости
М
увеличивается сила, действующая на иглу 14 от этого давления.
При достижении определенной ширины щели гидродинамическая сила,
действующая на иглу 14, и сила от давления в командной полости М ,
действующая на иглу 14, уравновешиваются. Вследствие чего, силы,
возникающие в дросселе при протекании через него горючего, не передаются
на приводной вал 43. Гидроусилитель в дросселе выполнен одностороннего
действия, то есть гидроусилитель может разгружать приводной вал 43 от
действия гидродинамической силы, действующей на иглу 14 в сторону
увеличения размера l. Несмотря на то, что гидравлическая схема дросселя
выбрана так, что гидродинамическая сила, действующая на иглу 14, во всем
диапазоне ее перемещения, стремится переместить иглу в сторону
увеличения щели l, отношение величины гидродинамической силы,
действующей на иглу 14, к величине силы, развиваемой гидроусилителем
при одинаковой ширине щели l, с увеличением перепада давления на
дросселе
уменьшается.
Это
происходит
за
счет
стремления
гидродинамической силы изменить свое направление на противоположное
при перемещении иглы 14 в сторону, соответствующую большим углам на
лимбе поводка 37.
Для
компенсации
действия
гидродинамической
силы
(уменьшающегося при перемещении иглы 14 в сторону, соответствующую
145
большим углам на лимбе поводка 37) служит переключатель. При изменении
положения иглы 14, соответствующему изменению углов на лимбе поводка
37 от 60° до 100°, отверстия Ж втулки 9 открыты. А так, как проходная
площадь отверстий Ж
больше жиклера l, то давление в полости д
равно
давлению в полости Л. Следовательно, в диапазоне углов от 60° до 100°
гидроусилитель противодействует только гидродинамической силе. При
дальнейшем изменении положения иглы в сторону увеличения углов на
лимбе поводка, отверстия Ж закрываются золотником 7, вследствие чего в
полости д поднимается давление до величины, определяемой соотношением
проходных площадей жиклеров и и е.
Это давление, действуя на иглу 14, компенсирует уменьшение действия
гидродинамической силы. Проходные площади жиклеров и и е подобраны
таким образом, чтобы баланс гидравлических сил, действующих на иглу 14,
обеспечивал достаточную эффективность гидроусилителя во всем диапазоне
её перемещения.
При поступлении сигналов от системы СОБ прибор управления через
поводок 37 вращает приводной вал 43, который перемещает рейку 33 и
прижатый к нему пружиной 23 золотник 21. При перемещении золотника 21
изменяется ширина кольцевой щели l, что приводит к изменению давления в
полости М. Равновесие сил, действующих на иглу 14, нарушается,
вследствие чего появляется неуравновешенная сила, которая перемещает
иглу в сторону движения золотника. При этом каждому положению
золотника будет соответствовать определенное положение иглы (слежение
иглы за золотником). С остановкой прибора управления, восстанавливается
равновесие действующих сил и перемещение иглы прекращается.
При отсутствии перепада давления на дросселе, изменение положения
иглы 14 и её удержание производится механической связью ее с поводком 37.
При повороте поводка 37 в сторону уменьшения углов по лимбу, золотник 21
упирается через пружину 23, или непосредственно, во втулку 22 (зазор l
146
выбран). При повороте поводка в сторону увеличения углов, регулировочный
винт упирается во втулку 25 (зазор l1 выбран).
4 НИЗКОЧАСТОТНАЯ МОДЕЛЬ ЖРД ЗАМКНУТОЙ СХЕМЫ
4.1. Задачи исследования динамических процессов в САР ЖРДУ
методами математического моделирования
Математическое моделирование является эффективным методом при
проектировании, анализе и доводке ЖРДУ [11, 14, 43, 46, 48]. Особое
значение придается методам математического моделирования при анализе
динамических процессов, протекающих в элементах и системах ЖРДУ во
время запуска, перехода с предварительной ступени тяги на главную,
регулирования тяги или давления в КС, соотношения компонентов, давления
в топливных баках и магистралях на входе в насосы, при останове двигателя.
В процессе математического моделирования процессов рассчитываются
изменения во времени основных параметров ЖРДУ при управляющем и
возмущающем воздействиях и по ним оценивается качество регулирования
систем, устойчивость, анализируется те или иные дефекты, возникающие в
процессе доводки ЖРДУ, определяется чувствительность характеристик
систем к отклонению конструктивных и режимных параметров.
Математическое моделирование стало мощным фактором решения
указанных выше задач с началом широкого внедрения в практику
быстродействующих ЭВМ, с увеличением их оперативной и постоянной
памяти, с созданием стандартного программного обеспечения, позволяющего
детально моделировать процессы в элементах и системах ЖРДУ.
Математическое моделирование начинается с составления расчетной
схемы ЖРДУ, принятия определенных упрощающих допущений при выводе
уравнений элементов. При моделировании ЖРДУ в виде замкнутой системы
нелинейных интегро-дифференциальных и алгебраических уравнений, число
неизвестных параметров в которой равно числу уравнений. В моделировании
указанный этап является наиболее трудным и ответственным, так как в
147
дальнейшем для решения систем уравнений существуют стандартные
методы, обеспечивающие наперед заданную точность результатов расчета.
Накладываемая на моделирование ответственность связана с трудностью
обоснования принятых допущений при выводе уравнений, так как, приняв
необоснованное допущение, можно качественно исказить результат анализа
протекающих в ЖРДУ процессов.
В данном разделе будут рассмотрены математическая модель ЖРДУ
закрытой схемы с дожиганием генераторного газа в основной КС, расчетная
схема которой представлена на рисунке 4.1. Функционирование основных
регуляторов ЖРДУ было описано в предыдущем разделе, поэтому с
принятием определенных упрощающих допущений выведем уравнения
элементов, входящих в состав этой ЖРДУ и составим систему уравнений,
подлежащей решению, и проведем анализ динамических характеристик
ЖРДУ.
4.2 Математическая модель камеры сгорания ЖРД
Математическая модель камеры сгорания (КС) ЖРДУ необходима для
описания изменения во времени основных параметров камеры и, прежде
всего, давления, температуры газа (продуктов сгорания) при отклонении
расхода компонентов топлива [32, 39, 43]. Такая модель в общем случае
должна включать известные уравнения баланса расхода компонентов
топлива, состояния газа, преобразования жидких компонентов в продукты
сгорания. В зависимости от того, для решения какой задачи составляется
математическая
модель,
КС
может
рассматриваться
как
объект
с
распределенными или сосредоточенными параметрами. Наиболее полно
процессы в КС описываются высокочастотной моделью, в которой камера
рассматривается как элемент с распределенными параметрами. На основе
такой модели могут быть решены задачи подавления высокочастотных
колебательных процессов, анализа вибрационного горения, однако такая
148
модель сложна и требует решения системы нелинейных дифференциальных
уравнений в частных производных.
Математическая модель КС в сосредоточенных параметрах более проста
и в ней камера описывается дифференциальным уравнением емкости,
способной к накоплению массы рабочего тела, а процесс преобразования
жидких
компонентов
топлива
в
газообразные
продукты
сгорания
рассматривается протекающим мгновенно, но с некоторой задержкой. Такая
математическая модель пригодна для анализа переходных процессов и
низкочастотных колебаний в КС и топливоподводящих магистралях. В
данном разделе рассматривается низкочастотная модель КС с принятием
ряда упрощающих допущений:
- процесс горения происходит мгновенно, но с некоторой задержкой по
времени τ к ;
- продукт сгорания – идеальный газ, параметры которого одинаковы во
всей камере.
Время задержки τ к включает в себя моменты распыла, испарения,
перемешивания и горения и оно составляет 0,01…0,1 с.
Основное уравнение в математической модели КС – уравнение баланса
массы компонентов топлива и продуктов сгорания в каждый момент
времени:
dmк (t )
= m& о (t − τ к ) + m& г (t − τ к ) − m& с (t ) ,
dt
где
(4.2.1)
mк (t ) - масса продуктов сгорания компонентов топлива; t - время;
m& о (t − τ к ) и m& г (t − τ к ) - массовые расходы окислителя и горючего в момент
& с (t ) - массовый расход продуктов сгорания через
времени t − τ к ; m
критическое сечение сопла в момент времени t .
Масса газа в КС определяется по известной зависимости:
mк (t ) =
Pк (t )Vк
,
RкTк
(4.2.2)
149
где Pк (t ) - давление в КС; Vк - объем КС; Rк - газовая постоянная; Tк температура газа в КС.
При постоянном соотношении компонентов топлива χ =const будет
постоянным и произведение RкTк = const .
Расход газа через критическое сечение сопла определяется по формуле:
m& с (t ) = Aк
Pк (t ) Fкр
RкTк
,
(4.2.3)
2 kk +−11
где Aк = k (
- постоянная, зависящая от коэффициента адиабаты
)
k +1
газа k ; Fкр - площадь критического сечения сопла.
Предположим, что двигатель работает на каком-то установившемся
режиме, относительно которого возможны малые отклонения параметров, то
есть:
Pк (t ) = Pк ,0 + ΔPк (t );
⎫
⎪
m& о (t − τ к ) = (m& о )0 + Δm& о (t − τ к );⎪
⎬
m& г (t − τ к ) = (m& г )0 + Δm& г (t − τ к ); ⎪
⎪
m& с (t ) = (m& с )0 + Δm& с (t ),
⎭
(4.2.4)
С учетом последних равенств (4.2.4) и (4.2.2) уравнение (4.2.1)
перепишется в виде:
Vк d ΔPк (t )
= (m& о )0 + Δmо (t − τ к ) + ( m& г )0 +
RкTк
dt
+Δm& г (t − τ к ) −
Aк Fкр
RкTк
Pк ,0 −
Aк Fкр
RкTк
(4.2.5)
ΔPк
На установившемся режиме работы КС соблюдается равенство:
Aк Fкр
Vк d ΔPк (t )
= (m& о )0 + (Δm& г )0 −
Pк ,0 = 0 .
PкTк
dt
RкTк
(4.2.6)
Преобразуем уравнение (4.2.5) с учетом(4.2.6) и приведем её к виду:
150
Vк d ΔPк (t ) Aк Fкр
+
ΔPк (t ) = Δm& о (t − τ к ) + Δm& г (t − τ к ) .
RкTк
dt
RкTк
Учитывая, что
Aк Fкр
RкTк
=
(4.2.7)
(m& ∑ )0
преобразуем уравнение к виду:
Pк ,0
Vк Pк ,0 Pк ,0 d ΔPк (t )
P
+ ΔPк (t ) = к ,0 [ Δm& о (t − τ к ) + Δm& г (t − τ к ) ] . (4.2.7)
RкTк (m& ∑ )0
dt
(m& ∑ )0
Переходя в (4.2.7) к относительным параметрам, получим:
Tкс
где Tкс =
d δ Pк (t )
+ δ Pк (t ) = K окδ m& о (t − τ к ) + K грδ m& г (t − τ к ) (4.2.8)
dt
Vк Pк ,0
Vк
=
- постоянная времени КС;
RкTк (m& ∑ )0 Aк Fкр Rк Tк
K ок = m& о ,0 / m& ∑ ,0 – коэффициент передачи КС по линии окислителя;
K гр = m& г ,0 / m& ∑ ,0 - коэффициент передачи КС по линии горючего.
Для дальнейшего анализа свойств КС как объекта регулирования
представим уравнение (4.2.8) к операторной форме (при нулевых начальных
условиях):
(Tкс s + 1)δ P%к = ( K окδ m&% о + K грδ m&% г )е −τ к s или
е −τ к s
%
δ Pк =
( K окδ m%& о + K грδ m%& г )
Tкс s + 1
(4.2.9)
где s – переменная в преобразовании Лапласа, волнистая черточка над
параметрами означает, что они приняты в изображениях по Лапласу.
Структурную схему КС как объекта регулирования можно построить на
основе уравнения (4.2.9) (рис. 4.2.1).
В некоторых случаях целесообразно представить уравнение (4.2.9) через
суммарный расход компонентов:
K ксδ m%& ∑ = K окδ m%& о + K грδ m%& г
δ P%к =
K кс −τ к s %
е δ m& ∑
Tкс s + 1
(4.2.10)
151
Рис. 4.2.1 – Структурная схема КС как объекта регулирования по давлению
Рассмотрим переходную характеристику КС при ступенчатом изменении
расхода топлива
δ m%& ∑ (t ) = Am& 1(t ) . Так как передаточная функция КС
∑
представляет собой последовательное соединение апериодического типового
звена и звена чистого запаздывания, то и переходная характеристика будет
соответствовать этим звеньям (рис. 4.2.2).
Рис. 4.2.2. – Переходная характеристика камеры сгорания ЖРД
при ступенчатом изменении расхода топлива
Из графика переходной характеристики КС следует, что давление в
камере начинает изменяться лишь по истечении времени τ к задержки
горения компонентов топлива, в дальнейшем рост давления протекает как
для апериодического звена – по экспоненте. Переходный процесс в КС
заканчивается в момент времени τ к + 3Tкс . Чем больше постоянная времени
КС, тем длительнее переходный процесс. Из формулы для Tкс следует, что
чем больше объем камеры, меньше площадь критического сечения сопла и
работоспособность газа RкTк , тем больше постоянная времени Tкс .
Для анализа частотных характеристик КС из (4.2.10) находим ее
передаточную функцию:
δ P%к K кс e −τ s
=
Wкс ( s ) =
δ m%& ∑ Tкс s + 1
к
(4.2.11)
152
и запишем соответствующую ей частотную функцию путем замены
s = jω .
δ P%K K кс e − jτ ω
=
.
Wкс ( jω ) =
δ m%& ∑ 1 + jTксω
к
(4.2.12)
Из (4.2.12) можно определить модуль и аргумент частотной функции,
которые иначе называют амплитудно-частотной (АЧХ) и фазочастотной
(ФЧХ) характеристиками.
M кс (ω ) = Wкс (iω ) =
K кс
(4.2.13)
1 + Tкс2 ω 2
ϕкс (ω ) = arg Wкс (iω ) = −ωτ к − ar сtg (ωTкс )
(4.2.14)
Из рисунка (4.2.3,а) ясно, что АЧХ КС представляет собой частотную
характеристику
апериодического
типового
звена,
а
фазочастотная
характеристика будет уходить в область отрицательных фаз более, чем -90
градусов (см. рис. 4.2.3,б).
а
б
Рис. 4.2.3. – Амплитудно-частотная (а) и фазочастотная характеристики камеры
сгорания ЖРД как объекта регулирования по давлению Pк
Так как ФЧХ звена чистого запаздывания представляет собой
бесконечную
прямую
с
отрицательным
наклоном,
то
амплитудно-
фазочастотная характеристика имеет вид спиралевидной кривой (рис. 4.2.4),
сходящейся к началу координат по мере возрастания частоты. Наличие
задержки τ к в процессе горения в КС имеет важное значение при оценке
низкочастотной неустойчивости процессов в ЖРДУ.
153
Рис. 4.2.4. – Амплитуднофазочастотная характеристика камеры сгорания ЖРД
как объекта регулирования
по давлению Pк
4.3 Математическая модель форсуночной головки и рубашки охлаждения
В предыдущем разделе при выводе уравнения КС рассматривался
процесс с момента поступления компонентов топлива непосредственно в
камеру, т.е. не учитывался момент прохождения топлива в форсуночной
головке и рубашке охлаждения. Рассмотрим модель этого процесса.
При выводе уравнений динамики форсуночной головки и рубашки
охлаждения камеры примем следующие допущения: компоненты топлива
при течении не меняют свои свойства; коэффициенты расхода топливных
форсунок принимаются постоянными и квазистационарными; перепад
давления на форсунках окислителя докритический; податливость каналов в
рубашке охлаждения камеры не учитывается; инерционность массы
компонентов топлива в форсунках не учитывается.
С учетом принятых допущений массовый расход газообразного
& о через форсунки рассчитывается по формуле:
окислителя m
m& о = μо Fо
2 kо
Pо 2
kо − 1 RоTо
2
kо
⎛ Pкс ⎞
⎛ Pкс ⎞
⎜
⎟ −⎜
⎟
P
P
о
2
о
2
⎝
⎠
⎝
⎠
kо +1
kо
(4.3.1)
где Fо – суммарная площадь проходных сечений форсунок окислителя; μо коэффициент расхода форсунок окислителя; kо – коэффициент адиабаты
154
газообразного окислителя; Pо 2 – давление на входе в форсунки или давление
на выходе из газовода за турбиной; Rо , Tо – газовая постоянная и
температура окислителя на входе в форсунки.
& г определяется по
Расход жидкого горючего через форсунки m
зависимости:
m& г = μ г Fг 2 ρ г ( Pгк 2 − Pкс ) ,
(4.3.2)
где Fг – суммарная площадь проходного сечения форсунок горючего; μ г коэффициент расхода форсунок горючего; Pгк 2 – давление на входе в
форсунки горючего; ρ г – плотность горючего.
Прежде чем попасть в полость форсуночной головки КС, горючее
проходит по каналам рубашки охлаждения камеры, уравнение движения
жидкости по которым имеет вид:
L po
dm& г
+ R po m& г = Pг 2 − Pгк 2 ,
dt
(4.3.3)
где L po , R po – акустическая индуктивность и гидравлическое сопротивление
каналов рубашки охлаждения; Pг 2 – давление горючего на входе в коллектор
рубашки охлаждения КС. Так как каналы в рубашке охлаждения КС
байпасные, то в первом приближении L po и R po можно рассчитать по
i=I
i)
формулам: L(kpo
=
∏L
i =1
i=I
∑L
i =1
i=I
(i )
kро
(i )
kро
;
i)
=
L(kpo
(i )
индуктивность i - го канала; Rkpo
=
∏R
i =1
i=I
(i )
kро
∑R
i =1
(i )
kро
i)
, где L(kpo
=
ρ г li
Fki
- акустическая
128 ρ г Li
- гидравлическое сопротивление
π di4
i-го канала; li , Fki – длина и площадь проходного сечения канала; ν г –
кинематическая вязкость горючего; di – эквивалентный диаметр канала.
155
Воспользовавшись методом малых отклонений можно линеаризировать
уравнения (4.3.1) …(4.3.3) и представить их в следующей линеаризованной
форме за вычетом базовых значений:
⎫
⎛ ∂m& ⎞
⎛ ∂m& ⎞
Δm& о = ⎜ о ⎟ ΔPо2 − ⎜ о ⎟ ΔPкс ; ⎪
⎝ ∂Pо2 ⎠0
⎝ ∂Pкс ⎠0
⎪
⎪
⎛ ∂m& г ⎞
⎛ ∂m& г ⎞
⎪
Δm& г = ⎜
⎟ ΔPгк 2 − ⎜
⎟ ΔPкс ; ⎬
⎝ ∂Pгк 2 ⎠0
⎝ ∂Pкс ⎠0
⎪
⎪
d Δm& г
&
Lро
+ Rро Δmг = ΔPг 2 − ΔPгк 2 ⎪
dt
⎪⎭
(4.3.4)
Переходя в (4.3.4) к относительным параметрам, получим:
⎫
⎪
δ m& о = K фодδ Pо 2 − K фокδ Pкс ;
⎪⎪
m& г = K фг 2δ Pгр 2 − K фгкδ Pкс ;
⎬
⎪
d δ m& г
Tpo
+ δ m& г = K po1δ Pг 2 − K po 2δ Pгр 2 , ⎪
⎪⎭
dt
где δ Pо 2 =
(4.3.5)
ΔPгр 2
ΔPо 2
ΔPг 2
; δ Pгр 2 =
; δ Pг 2 =
- относительные значения
( Pо 2 )0
( Pг 2 )0
( Pгр 2 )
0
переменных;
⎛ ∂m& ⎞
⎛ ∂m& ⎞
Δm& о = ⎜ о ⎟ ΔPо 2 − ⎜ о ⎟ ΔPкс ;
⎝ ∂Pо 2 ⎠0
⎝ ∂Pкс ⎠0
⎛ ∂m& г ⎞
⎛ ∂m& г ⎞
Δm& г = ⎜
Δ
−
P
⎟
⎜
⎟ ΔPкс ;
гк 2
∂
∂
P
P
⎝ гк 2 ⎠0
⎝ кс ⎠0
d Δm& г
+ R ро Δm& г = ΔPг 2 − ΔPгк 2 −
L ро
dt
156
K ро1 =
( Pг 2 )0
;
&
m
R
( г )0 ро
K ро 2 =
( Pгк 2 )0
( m& г )0 R ро
-
коэффициенты
передачи
форсуночной головки и рубашки охлаждения КС; Tро = L ро / R ро - постоянная
времени рубашки охлаждения КС.
Из формул (4.3.5) следует, что форсуночная головка представляет
собой пропорциональные звенья по линии окислителя и горючего, а рубашка
охлаждения КС – апериодическое типовое звено. Для представления
зависимостей (4.3.5) в форме структурной схемы выразим их в операторной
форме при нулевых начальных условиях:
⎫
⎪⎪
%
%
%
&
δ mг = K фг 2δ Pгр + K фгкδ Pкс ;
⎬
⎪
(Tро s + 1) δ m&% г = K ро1δ P%г 2 − K ро 2δ P%гр 2 ,⎪⎭
δ m%& о = K фо 2δ P%о 2 + K фокδ P%кс ;
(4.3.6)
где волнистая черточка над параметрами означает, что они учитываются в
изображениях по Лапласу. По уравнениям (4.3.6) можно составить
структурную схему форсуночной головки и рубашки охлаждения камеры
сгорания ЖРД. Таким образом по линии подачи горючего рубашка
охлаждения и форсуночная головка представляют собой апериодическое
типовое звено, а форсуночная головка окислителя – пропорциональное
типовое звено. Переходные и частотные характеристики этих типовых
звеньев достаточно хорошо изучены в курсе лекций «Управление в
технических системах», поэтому здесь не рассматриваются.
4.4 Математическая модель газовода и магистрали горючего
Газовод служит для подвода газообразного окислителя с выхода
турбины к камере сгорания ЖРД. Учитывая малую длину газовода, т.к. ТНА
расположен
непосредственно
на
двигателе,
примем
допущение
о
возможности рассмотрения газовода в сосредоточенных параметрах. Кроме
эого, предположим, что гидравлические потери по длине газовода
157
пренебрежимо малы. Тогда газовод можно рассматривать как акустическую
емкость, для которой основным уравнением является баланс расходов:
m& ог − m& о − Cаг
dPо 2
=0
dt
(4.4.1)
& ог – массовый расход газообразного окислителя с выхода турбины; m& о где m
массовый расход газообразного окислителя на входе в форсунки;
Cаг =
Vгв
aо2
(4.4.2)
– акустическая емкость газовода; Vгв – объем внутренней полости газовода;
aо – скорость звука в газообразном кислороде на выходе из турбины.
Переходя в (4.4.1) к малым отклонениям, получим
Tгв
d δ Pо 2
= δ m& ог − δ m& о
dt
где Tгв = Саг
( Pо 2 )0
( m& о )0
(4.4.3)
& ог =
– постоянная времени газовода; δ m
Δm& ог
( m& о )0
–
относительное отклонение расхода окислителя на выходе из турбины.
⋅
Из (4.4.3) можно определить δ mО :
δ m& о = δ m& ог − Tгв
d δ Pо 2
dt
или в операторной форме
δ m%& о = δ m%& ог − Tгв sδ P%о 2
(4.4.4)
Математическая модель трубопровода, подводящего горючее от насоса
к коллектору на входе в рубашку охлаждения при допущении о
сосредоточенности параметров и малости объемной податливости жидкости
описывается уравнением
Lтк
dm& г
+ K нл m& г2 = Pгн 2 − Pг 2 ,
dt
(4.4.5)
158
где Lтк =
lтк
– удельная акустическая индуктивность трубопровода; lтк ,
Fтк
Fтк – длина и площадь проходного сечения трубопровода; K нл = λтк
lтк
–
d тк
коэффициент, учитывающий гидравлические потери по длине трубопровода;
λтк =
4m& г
0,316
Re
–
коэффициент
трения
жидкости
в
трубопроводе;
=
–
Re0,25
π d ткν
число Рейнольдса; ν – кинематическая вязкость жидкости; d тк – диаметр
трубопровода; Pгн 2 – давление горючего на выходе из основного насоса.
После линеаризации нелинейной характеристики трубопровода и
приведения уравнения (4.4.5) к безразмерной форме получим
Tтк
d δ m& г
+ δ m& г = K тк1δ Pг 2 ,
dt
где Tтк =
2 ( ΔPтк )0
Lтк
= 2 K нл –
– постоянная времени трубопровода; Rтк =
Rтк
( m& г )0
линеаризованное
K тк1 =
(4.4.6)
гидравлическое
( Pгн 2 )0
;
&
m
R
( г )0 тк
K тк 2 =
сопротивление
( Pг 2 )0
( m& г )0 Rтк
–
трубопровода;
коэффициенты
передачи
трубопровода соответственно по давлениям Pгн 2 и Pг 2 .
& г и преобразовав его к
Решив уравнение (4.4.6) относительно δ m
операторной форме получим
δ m%& г =
1
K тк1δ P%гн 2 − K тк 2δ P%г 2 .
Tтк s + 1
(
)
(4.4.7)
На основе уравнений (4.4.4) и (4.4.7) можно построить элементы
структурной схемы ЖРДУ, представленные на рис. (4.4.1). Как следует из
структурных
схем
газовод
представляет
собой
идеальное
дифференцирующее заено, а трубопровод горючего – апериодическое
типовое
звено
с
соответствующими
переходными
и
частотными
характеристиками.
159
а
б
Рис. 4.4.1. Структурные схемы газовода (а) и трубопровода подвода горючего
от насоса к коллектору на входе в рубашку охлаждения (б).
4.5 Уравнение ротора ТНА
При выводе уравнения ротора ТНА принимаются допущения: момент на
вращение дополнительного насоса горючего по сравнению с моментами
противодействия
основных
насосов
пренебрежимо
мал;
в
модели
пиростартер не учитывается; процессы в ТНА квазистационарные [9, 32, 34].
Основным уравнением ротора является уравнение его движения или
баланса моментов, развиваемых турбиной и противодействия насосов:
IТНА
dω
= M т (ω , m& т , π т ) − M но (ω , m& о ) − M нг (ω , m& г ) ,
dt
(4.5.1)
& т , π т ) – момент,
где IТНА – полярный момент инерции ротора ТНА; M т (ω , m
развиваемый
турбиной;
M но (ω , m& о ) ,
M нг (ω , m& г )
–
моменты
противодействия со стороны насосов окислителя и горючего.
Применяя метод малых отклонений, представим равенство (4.5.1) в
виде:
IТНА
⎛ дM т ⎞
⎛ дM т ⎞
d Δω
⎛ дM т ⎞
= M т ,0 + ⎜
⎟ Δπ т −
⎟ Δω + ⎜ & ⎟ Δm& т + ⎜
dt
дm
д
π
⎝ дω ⎠0
т ⎠0
⎝
⎝ т ⎠0
⎛ дM но ⎞
⎛ дM нг ⎞
⎛ дM но ⎞
⎛ дM нг ⎞
&
− M но ,0 − ⎜
Δ
−
Δ
−
−
Δ
−
ω
ω
m
M
⎜
⎟
⎜ & ⎟ Δm& г ,
⎟
⎜
⎟
о
нг ,0
&
ω
ω
д
дm
д
⎝
⎠0
⎝
⎠0
о ⎠0
⎝
⎝ дmг ⎠0
(4.5.2)
где M т ,0 , M но ,0 , M нг ,0 - установившиеся значения моментов, соответственно
развиваемой турбиной, противодействия со стороны насосов окислителя и
160
⎛ дM т ⎞ ⎛ дM т ⎞ ⎛ дM т ⎞
⎟ , ⎜ дm& ⎟ , ⎜ дπ ⎟ - частные производные момента
ω
д
⎝
⎠0 ⎝
т ⎠0 ⎝
т ⎠0
горючего; ⎜
турбины по частоте вращения ротора ТНА, расходу газа через турбину и
⎛ дM но ⎞ ⎛ дM но ⎞ ⎛ дM нг ⎞
⎟ , ⎜ дm& ⎟ , ⎜ дω ⎟ ,
ω
д
⎝
⎠0 ⎝
⎠0
о ⎠0 ⎝
степения расширения газа на турбине; ⎜
⎛ дM нг ⎞
⎜ & ⎟ - частные производные моментов противодействия со стороны
⎝ дmг ⎠0
насоса окислителя и горючего по частоте вращения ротора ТНА и расходу
& т , Δπ т , Δm& о , Δm& г - соответственно
компонентов топлива; Δω , Δm
приращения частоты вращения ротора ТНА, расхода газа через турбину,
расхода окислителя и горючего.
Так
как
на
установившемся
режиме
справедливо
равенство
M т,0 − M но ,0 − M нг ,0 = 0 , то уравнение (4.5.2) можно представить в
следующем виде:
IТНА
d Δω ⎡⎛ дM но ⎞ ⎛ дM нг ⎞ ⎛ дM т ⎞ ⎤
+ ⎢⎜
⎟ + ⎜ дω ⎟ − ⎜ дω ⎟ ⎥ Δω =
dt
д
ω
⎠0 ⎝
⎠0 ⎝
⎠0 ⎦
⎣⎝
⎛ дM т ⎞
⎛ дM т ⎞
⎛ дM но ⎞
⎛ дM нг ⎞
⎜
⎟ Δm& т + ⎜
⎟ Δπ т − ⎜
⎟ Δm& о − ⎜
⎟ Δm& г ,
&
&
&
дm
д
дm
дm
π
т ⎠0
о ⎠0
г ⎠0
⎝
⎝ т ⎠0
⎝
⎝
или в относительной форме
TТНА
d δω
+ δω = K т ,m& т δ m& т + K т ,π т δπ т − K но ,m& о δ m& о − K нг ,m& г δ m& г
dt
где TТНА =
K т,m& т
(4.5.3)
IТНА
- постоянная времени ТНА;
⎛ дM но ⎞ ⎛ дM нг ⎞ ⎛ дM т ⎞
⎜ дω ⎟ + ⎜ дω ⎟ − ⎜ дω ⎟
⎝
⎠0 ⎝
⎠0 ⎝
⎠0
⎛ дM т ⎞
⎜ & ⎟ m& т ,0
⎝ дmт ⎠0
=
,
⎡⎛ дM но ⎞ ⎛ дM нг ⎞ ⎛ дM т ⎞ ⎤
⎢⎜ дω ⎟ + ⎜ дω ⎟ − ⎜ дω ⎟ ⎥ ω0
⎠0 ⎝
⎠0 ⎝
⎠0 ⎦
⎣⎝
161
K т ,m& т
⎛ дM т ⎞
⎜
⎟ π т ,0
д
π
⎝ т ⎠0
=
,
⎡⎛ дM но ⎞ ⎛ дM нг ⎞ ⎛ дM т ⎞ ⎤
⎢⎜ дω ⎟ + ⎜ дω ⎟ − ⎜ дω ⎟ ⎥ ω0
⎠0 ⎝
⎠0 ⎝
⎠0 ⎦
⎣⎝
K т,m& т
⎛ дM но ⎞
⎜ & ⎟ m& о ,0
⎝ дmо ⎠0
=
,
⎡⎛ дM но ⎞ ⎛ дM нг ⎞ ⎛ дM т ⎞ ⎤
⎢⎜ дω ⎟ + ⎜ дω ⎟ − ⎜ дω ⎟ ⎥ ω0
⎠0 ⎝
⎠0 ⎝
⎠0 ⎦
⎣⎝
K т,m& т
⎛ дM нг ⎞
⎜ & ⎟ m& г ,0
⎝ дmг ⎠0
=
⎡⎛ дM но ⎞ ⎛ дM нг ⎞ ⎛ дM т ⎞ ⎤
⎢⎜ дω ⎟ + ⎜ дω ⎟ − ⎜ дω ⎟ ⎥ ω0
⎠0 ⎝
⎠0 ⎝
⎠0 ⎦
⎣⎝
- коэффициенты передачи ТНА по соответствующим параметрам.
Перейдя
в
уравнении
(4.5.3)
к
относительным
параметрам
в
операторной форме и проведя некоторые преобразования, можно получить
уравнение ТНА, которое будет использовано при построении структурной
схемы ЖРД:
δω% =
1
( K т ,m& т δ m%& т + K т ,π т δπ% т − K но ,m& о δ m%& о − K нг ,m& г δ m%& г )
TТНА s + 1
(4.5.4)
В уравнении (4.5.4) волнистая черточка над параметрами означает, что
они берутся в изображениях по Лапласу.
4.6 Уравнения центробежных насосов ТНА
В ТНА применяются центробежные насосы, как позволяющие нагнетать
большие расходы компонентов при минимальных габаритах. Выходным
параметром насоса давление и массовый расход компонента топлива,
которые взаимосвязаны и эта связь определяется граничными условиями или
присоединенными магистралями. Входными параметрами насоса являются
частота вращения привода, его ускорение, расход компонента топлива и ег
скорость изменения во времени. При выводе уравнения насоса его разбивают
162
на три части: входной патрубок; рабочее колесо и отводящая магистраль в
виде спиралевидного и конического диффузора. Уравнения входного
патрубка и отводящего устройства выводятся на основе уравнения Бернулли
без учета изменения пьезометрического напора, а рабочего колеса на основе
теоремы об изменении момента количества движения жидкости в окружном
направлении.
Окончательно
(без
вывода)
уравнение
динамики
центробежного насоса записывается в виде:
Pвых = Pвх + а1ω 2 − а2ω m& − Rн m& 2 − Lн
dm&
dω
+ Aρ
,
dt
dt
(4.6.1)
где Pвх - давлние компонента топлива на входе в насос; а1 , а2 - постоянные
коэффициенты, зависящие от конструктивных и режимных параметров
& - массовый расход
насоса; ω - угловая частота вращения привода насоса; m
компонента топлива;
Rн
-
Коэффициент,
учитывающий
суммарные
гидравлические потери в насосе; Lн - акустическая индуктивность жидкости,
характеризующая
инерционные
свойства
насоса;
A
-
коэффициент
зависящие от конструктивных параметров рабочего колеса и определяющий
влияния ускорения ротора ТНА на выходное давление насоса; ρ - плотность
компонента топлива.
Если линеаризовать выражение (4.6.1) методом малых отклонений, то
учитывая только переменные параметры можно получить:
ΔPвых = ΔPвх + 2а1ω0 Δω − а2ω0 Δm& − а2 m& 0 Δω − 2 Rн m& 0 Δm& − Lн
(4.6.2)
d Δm&
d Δω
+ Aρ
dt
dt
Уравнение (4.6.2) можно привести к относительной форме:
δ Pвых = K1δ Pвх + K 2δω − K 3δ m& − T2
где
K1 =
Pвх ,0
Pвых ,0
,
K2 =
ω0
Pвых ,0
d δ m&
d δω
+ T1
dt
dt
(2а1ω0 − а2 m& 0 ) ,
коэффициенты передачи насоса; T1 =
(4.6.3)
K3 =
m& 0
(а2ω0 + 2 Rн ) ,
Pвых ,0
Aρω0
L m&
, T2 = н 0
Pвых ,0
Pвых ,0
-
- постоянные
163
времени насоса по частоте вращения привода ω и расходу компонента
топлива.
Если иметь в виду, что ТНА включает насосы окислителя и горючего,
то на основании равенства (4.6.3) можно записать для них соответствующие
выражения:
о
δ Pвых
= K1оδ Pвхо + K 2оδω − K 3оδ m& о − T2о
d δ m& о
d δω
+ T1о
dt
dt
(4.6.4)
d δ m& г
d δω
+ T1г
dt
dt
(4.6.5)
- для насоса окислителя;
г
δ Pвых
= K1гδ Pвхг + K 2гδω − K 3гδ m& г − T2г
- для насоса горючего.
Для ЖРД с дожиганием и газогенератором, работающим от основных
компонентов топлива можно еще записать уравнение для дополнительного
насоса горючего
гг
δ Pвых
= K1ггδ Pвхгг + K 2ггδω − K 3ггδ m& гг − T2гг
d δ m& гг
d δω
+ T1гг
.
dt
dt
(4.6.6)
Уравнения (4.6.4)…(4.6.6) можно привести к операторной форме
о
δ P%вых
= K1оδ P%вхо + ( K 2о + T1о s )δω% − ( K 3о + T2о s )δ m&% о ;
(4.6.7)
г
δ P%вых
= K1гδ P%вхг + ( K 2г + T1г s )δω% − ( K 3г + T2г s )δ m%& г ;
(4.6.8)
гг
δ P%вых
= K1ггδ P%вхгг + ( K 2гг + T1гг s )δω% − ( K 3гг + T2гг s )δ m&% гг .
(4.6.9)
На
основе
уравнений
(4.6.7)…(4.6.9)
могут
быть
построены
структурные схемы центробежных насосов ТНА, которые впоследствии
будут объединены в структурную схему САР ЖРД.
4.7 Низкочастотная и высокочастотная неустойчивости
камеры сгорания ЖРД
В камере ЖРД иногда возникает неустойчивое (вибрационное) горение
При этом происходят колебания давления, сопровождаемые колебаниями
температуры, состава и скорости газа в камере [14, 22, 25, 28, 30, 31].
Колебания давления могут происходить в широком диапазоне амплитуд от
164
долей атмосферы до величины среднего давления в камере при частотах
колебаний от десятков до нескольких тысяч герц.
Под неустойчивым горением понимают не случайно возникшие и сразу
затухающие колебания (всплески) давления, а периодические колебания с
определенными частотами и амплитудами, которые, начавшись по той или
иной причине, поддерживаются вследствие возникновения регулярного
автоколебательного процесса.
Обычно различают два основных типа колебаний: низкочастотные
колебания, имеющие частоту колебаний от десятков до нескольких сот герц,
и высокочастотные колебания с частотой колебаний до 10... 12 кГц.
На рис. 5.6 показаны типичные графики изменения давления при низко
частотных и высокочастотных колебаниях. Границу между низкочастотными
и высокочастотными колебаниями можно установить, сопоставляя период
колебаний Tк и время пребывания в камере сгорания τ к . Если Tк > τ к , газы в
камере колеблются как единое целое. Такие колебания относят к
низкочастотным. Так, например, при т τ к = 0,002 с колебания с частотой
f < 500 Гц ( Tк > 0,002 с) относятся к низкочастотным. Если Tк < τ к , то
можно проследить распространение волны по камере. Такие колебания
относятся к высокочастотным. Иногда отличают колебания с промежуточной
частотой, возникающие вследствие колебаний состава смеси, подаваемой в
камеру.
Возникновение неустойчивости горения в ЖРД крайне нежелательно.
При низкочастотной неустойчивости могут иметь место колебания давления
с амплитудой, приводящей к разрушению камеры, сильные вибрации всей
двигательной установки, уменьшение удельного импульса тяги. Основным
следствием высокочастотных колебаний является интенсификация
теплообмена из-за разрушения (размыва) пограничного слоя, приводящая к
прогару камеры.
165
Рис. 4.7.1. Колебания давления в камере: а, б низкочастотная неусгойчивость; в
высокочастотная неустойчивосТь; г - наложение низкочастотных и высокочастотных
колебаний
Процессы, происходящие при неустойчивом горении, являются
предметом тщательного теоретического и экспериментального изучения.
Несмотря на то, что существуют работы, в которых проведен широкий
анализ явлений при неустойчивом горении, общая теория неустойчивого
горения в ЖРД пока не опубликована.
Рассмотрим основные явления, происходящие при неустойчивом горении.
Низкочастотная неустойчивость. Характерным признаком низкочастотных
колебаний
является
превышение
периода
колебаний
над
временем
пребывания, т. е. колебания давления происходят сразу во всем объеме
камеры. Причины возникновения и поддержания низкочастотных колебаний
связаны, в первую очередь, с наличием времени задержки воспламенения, а
также с динамическими характеристиками элементов системы подачи. При
этом
механизм
возникновения
неустойчивости
можно
представить
следующим образом (рис. 4.7.2).
Пусть в камере сгорания по какой-либо причине произошло случайное
колебание давления (кривая 1). В начальный момент времени при
увеличении давления в камере перепад на форсунках ΔPф соответственно
уменьшился (кривая 2). Однако расход подаваемых компонентов сразу не
изменяется, так как система подачи не может мгновенно реагировать на
изменение ΔPф . Необходимо некоторое время в течении которого расход
топлива уменьшится в соответствии с уменьшением ΔPф . Иными словами,
166
изменение расхода при изменении давления Pк будет происходить с
запаздыванием на время τ 1 (кривая 3).
Воспламенение
будет
топлива
запаздывать
относительно подачи еще на
время
индукции
воспламенения τ и (кривая 4).
Но так как камера сгорания
имеет определенную емкость,
изме
нение
количества
топлива
изменения
сгоревшего
скажется
на
изменении давления в камере
Рис. 4.7.2. К пояснению механизма
возникновения
низкочастотной
неустойчивости камеры сгорания ЖРД
не сразу, а с запаздыванием на
некоторое время τ к (кривая 5).
Таким образом, изменение в какой-то момент времени давления в
камере сгорания Pк спустя время τ под
+ τ и + τ к проявится в виде влияния на
давление уже вследствие изменения количества сгоревшего топлива. Если
сумма
τ под + τ и + τ к
равна полупериоду колебания давления, то влияние
уменьшения количества сгоревшего топлива на Pк скажется как раз в тот
момент, когда это давление будет наименьшим. Это приведет к новому
уменьшению давления, вследствие чего колебания давления, возникнув,
будут поддерживаться без затухания.
Аналогично, при уменьшении давления влияние увеличения расхода
компонентов проявится при наибольшем давлении в камере. Таким образом,
из-за смещения фаз в изменении давления и влияния этого изменения на
давление в камере происходит самовозбуждение колебаний. При этом
колебания давления в камере приводят к колебаниям давления топлива в
167
системе подачи, т. е. при низкочастотных колебаниях происходят колебания
во всей системе подачи.
В
некоторых
случаях
возможно
возбуждение
низкочастотных
колебаний только внутри камеры, при сохранении неизменной подачи
топлива.
Это
так
называемая
внутрикамерная
низкочастотная
неустойчивость, возникающая независимо от характеристик системы подачи.
Причиной ее возникновения является колебание времени йндукции
воспламенения
τи
вследствие
колебания
значений
параметров
газа
(давления, температуры и т. д.) в камере.
Частота и амплитуда колебаний зависят, прежде всего, от давления в
камере и рода топлива. Увеличение давления приводит к увеличению
частоты и уменьшению амплитуды колебаний. Значительное снижение
давления может привести к опасному увеличению амплитуды. Для
самовоспламеняющихся топлив характерно увеличение частот и уменьшение
амплитуд колебаний; увеличение объема камеры приводит к уменьшению
частоты колебаний и уменьшению амплитуды; увеличение перепада
давления на форсунках приводит к возрастанию частоты.
Соотношение компонентов χ , мало влияет на частоту колебаний.
Однако устойчивость горения сильно зависит от величины χ . На рис. 4.7.3
приведены результаты экспериментального исследования устойчивости
работы ЖРД на топливе, состоящем из смеси HNO3 и фурфурилового
спирта, при изменении коэффициента избытка окислителя α и давления Pк в
камере сгорания.
Рис. 4.7.3. Влияние коэффициента
избытка окислителя и давления в
камере горания на устойчивость
горения
168
Высокочастотная неустойчивоеть
Кроме низкочастотных колебаний, в камере ЖРД возможно также
возникновение высокочастотных колебаний с частотой порядка нескольких
тысяч герц (в некоторых случаях до 10... 12 кГц) [14]. При этом период
колебаний меньше времени пребывания продуктов сгорания в камере, так
что можно проследить распространение волны давления по камере. Таким
образом, при высокочастотной неустойчивости в отличие от низкочастотной
возникают местные колебания давления, а не сразу во всем объеме, что
приводит к неоднородности давления (и других параметров) по объему
камеры в данный момент времени. При этом высокочастотные колебания в
камере практически не влияют на давление подачи и расход компонентов.
В зависимости от условий в камере сгорания ЖРД и ее геометрии
возможно возбуждение двух основных типов колебаний: продольных и
поперечных. В свою очередь, поперечные колебания разделяются на
тангенциальные и радиальные.
При продольных колебаниях параметры газов в камере (давление,
температура и т. д.) изменяются вдоль оси камеры. Тогда в сечениях камеры,
перпендикулярных оси, параметры газа имеют одинаковые значения. При
поперечных колебаниях (тангенциальных или радиальных) изменение
параметров происходит в плоскости, перпендикулярной оси камеры;
параметры газа вдоль каждой линии, параллельной оси камеры, остаются
постоянными.
Тангенциальные колебания могут существовать в двух формах: стоячей
волны, при которой поверхности узлов стационарны, и вращающейся волны,
в которой узловые поверхности вращаются. На рис. 4.7.4 приведены схемы
различных видов (мод) колебаний.
169
Рис.
4.7.4.
Виды
(моды)
высокочастотных
колебаний
в
камере ЖРД: а – прдольные; б –
тангенциальные; в – радиальные; - ----- линии равных давлений
Пунктиром показаны линии равных значений давлений; стрелками направление пульсационного движения газовых масс. Слева показан момент,
когда массы движутся вправо, а справа — через полпериода. При
продольных колебаниях (см. рис. 4.7.4,а) газы движутся вдоль оси камеры,
так что пульсационные составляющие складываются со средней скоростью.
При тангенциальных колебаниях (см. рис. 4.7.4,б) вследствие того, что
поперечное сечение камеры является кругом, линии равных давлений
перестают быть прямыми. В случае радиальных колебаниях (см. рис. 4.7.4,в)
осью симметрии является ось камеры сгорания.
В камере ЖРД колебания не всегда возбуждаются в виде «чистых»
продольных или поперечных колебаний. Часто происходят смешанные
(комбинированные)
колебания,
представляющие
собой
сочетание
продольных и поперечных колебаний или сочетание различных видов (мод)
поперечных колебаний. Кроме того, для каждого вида (моды) колебаний
возможно возникновение первой, второй и следующих мод колебаний. На
рис. 4.7.5 показаны различные виды поперечных колебаний.
Теоретический анализ высокочастотной неустойчивости очень сложен.
Несмотря на то, что опубликованы десятки трудов, посвященных анализу
отдельных видов высокочастотных колебаний, механизм возникновения и
поддержания высокочастотных колебаний до настоящего времени изучен
далеко не полностью [14].
170
Рис. 4.7.5. Виды поперечных колебаний: а – чисто тангенциальные
моды; б – чисто радиальные моды; в – смешанные моды
Экспериментальные данные показывают, что на высокочастотную
неустойчивость в камере ЖРД оказывают влияние системы впрыска топлива,
геометрия камеры, процесс расширения в сопле. Различные топлива
обладают
разной
склонностью
к
возникновению
высокочастотных
колебаний. Существует ряд практических рекомендаций по борьбе с
высокочастотной неустойчивостью, например использование различного
рода
антипульсационных
перегородок
на
форсуночной
головке,
предложенных главным конструктором А. М. Исаевым, и применение
выдвинутых в камеру сгорания двухкомпонентных форсунок, конструкция
которых разработана в НПО «Энергомаш» им. академика В. П. Глушко, и т.
д.
5 ПРОДОЛЬНАЯ УСТОЙЧИВОСТЬ РАКЕТЫ
С ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ
5.1 Механизм потери продольной устойчивости ракеты
Корпус
ракеты
представляет
собой
упругую
систему.
Поэтому
возмущения, действующие на ракету в полете, могут вызывать продольные
колебания (растяжение – сжатие) [19, 20, 29, 37]. Предположим, что
171
возникшие продольные колебания корпуса ракеты, сопровождающиеся
продольными колебаниями жидкости в баках, вызывают колебания расхода и
давления на их выходе. Возникшие колебания давления в топливных
магистралях передаются на вход в насосы, изменяя подачу топлива в камеру
сгорания и вызывая колебания тяги двигателя. Изменение тяги двигателя при
определенных условиях могут привести к усилению колебаний корпуса
ракеты, что в свою очередь как написано выше – к росту амплитуд колебаний
давления в топливных магистралях и так далее. Этим подтверждается
наличие
обратной
связи
в
системе:
корпус
ракеты-баки-топливные
магистрали –двигатель (рис. 5.1.1).
Можно представить схему замкнутого динамического контура, звеньями
которого являются указанные узлы ракеты. Возникающие в конструкции
ракеты большие динамические нагрузки могут вызвать повреждения
приборов и даже разрушить ракету. Это явление в американской литературе
получило название POGO-эффект. Это явление присуща для крупных ракет,
впервые с ним столкнулись на ракете-носителе “Атлас” (США).
Частота колебаний виброперегрузки и других параметров лежит в
пределах 3…10 Гц (в зависимости от конструктивных параметров системы).
На ракетоносителе “Атлас” – 6…7 Гц.
В
контуре
продольных
колебаний
имеются
два
выраженных
осциллятора: корпус ракеты и трубопровод, каждый из которых обладает
какой-то собственной (резонансной) частотой ωк и ωтр .
Рис. 5.1.1 – Схема динамического контура корпуса
ракеты – носителя с ЖРД
172
Рис. 5.1.2 – Характер изменения
виброперегрузки в процессе полета
ракеты в момент возникновения
POGO – эффекта
Наиболее благоприятные условия для развития продольных колебаний
корпуса ракеты складываются при ωк = ωтр . При этом резко увеличиваются
коэффициент усиления контура, что ведет к повышению эффективности
обратной связи.
Рис. 5.1.3 – График изменения собственных
частот колебаний корпуса ракеты ωК и
топливной магистрали ωТР в процессе
полета РН
При этом в смысле критерия Найквиста годограф АФЧХ разомкнутой
системы имеет максимум модуля при фазе примерно равной −π (два
колебательных звена), что создает условия для охвата точки
[ −1; j 0]
(рис. 5.1.4).
Рис. 5.1.4 – Годограф АФЧХ устойчивого
разомкнутого контура, соответствующие
устойчивому (1) и неустойчивому (2)
состояниям системы РН в смысле
продольной устойчивости
173
Двигатель в этом случае может явиться существенным стабилизатором
за счет ограничения модуля
δ Pк (ω )
, который в этой схеме ЖРД с ТНА и
δ Pвх (ω )
так не велик (0,01…0,1). Таким образом, зная коэффициент усиления корпуса
ракеты и топливных трубопроводов можно путем ограничения
δ Pк (ω )
δ Pвх (ω )
избежать в какой-то степени охвата критической точки [ −1; j 0] в плоскости
АФЧХ разомкнутой системы. Эффективный путь предотвращения этого
явления заключается в изменении динамических свойств топливоподающего
тракта. Оно может быть осуществлено разными способами, например,
вводом газа в магистрали для снижения скорости звука, установкой
демпфирующего устройства (сосредоточенная податливость) на выходе из
топливоподающего
тракта
(второй
способ
более
эффективен).
Он
использован на РН “Сатурн 5”. При этом уводится первый тон собственных
колебаний жидкости в трубопроводе ниже наименьшего тона корпуса РН.
Опыт летных испытаний ракет- носителей показывает, что на
определенном участке траектории в некоторых случаях наблюдается
значительное возрастание амплитуды продольных перегрузок, приводящее к
нарушению нормального функционирования систем или даже разрушению
конструкции. При этом, наряду с упругими продольным и колебаниями
корпуса ракеты-носителя, развиваются колебания давления той же частоты в
гидравлических трактах ДУ.
Рис. 5.1.5 – График изменения собственных
частот колебаний корпуса ракеты ( ωк ) и
топливной магистрали
ωтр
без демпфера и
с демпфером
174
Физическая
картина
указанного
явления
примерно
следующая.
Случайные возмущения тяги двигателя вызывают упругие колебания корпуса
ракеты-носителя. Последние приводят к изменению объемов системы
питания,
колебаниям
давления
на
днища
баков,
перемещениям
чувствительных элементов регуляторов и т. п. В результате возникают
колебания расходов топлива через камеру сгорания и массового соотношения
компонентов, что, в свою очередь, вызывает колебание тяги. Амплитуда этих
колебаний может оказаться больше амплитуды первоначальных возмущений,
что приведет к раскачиванию ракеты.
Опасность
возникновения
продольной
неустойчивости
ракеты-
носителя тем больше, чем ближе собственные частоты колебаний корпуса и
колебаний топлива в магистралях’ системы питания. Поэтому один из
методов повышения запаса устойчивости, который нашел наибольшее
распространение
на
практике,
состоит
в
изменении
динамических
характеристик расходных магистралей. При этом стремятся понизить
собственную частоту колебаний топлива путем установки в систему питания
вблизи ТНА гидравлических аккумуляторов-демпферов.
5.2 Трубопроводы топливных магистралей
и их динамические модели
Трубопроводы являются одним из основных элементов ПГС и служат
для передачи энергии (жидкости, газа) от одного агрегата к другому в
силовых системах или передачи сигнала в виде изменения давления от
объекта к чувствительным элементам. Длины трубопроводов в зависимости
от назначения ПГС исчисляются километрами (например, для авиационных
систем), а диаметры от 2…3 мм до30…50 мм. Динамические процессы в
трубопроводах играют существенную роль в динамике всей системы, они
определяют резонансные явления, разрушения усталостного характера
агрегатов, запаздывания и другие искажения сигнала в информационных
пневмогидравлических целях. Поэтому весьма важно изучение динамических
175
процессов в трубопроводах и составление их математических моделей,
адекватных реальным процессам [7, 19, 39, 42].
В зависимости от решаемой задачи математическая модель движения
жидкости в трубопроводах может быть представлена в сосредоточенных и
распределенных
параметрах.
Для
анализа
переходных
режимов
и
низкочастотных процессов в ЖРДУ используется модель трубопровода в
сосредоточенных параметрах, т.е. когда можно принять движение жидкости
как одну целую субстанцию, скорость жидкости на входе в трубе равна
скорости жидкости на выходе. При изучении высокочастотных процессов,
когда
длина
трубопровода
соизмерима
и
больше
длины
волны
распространяющихся колебаний жидкости следует пользоваться моделью
трубопровода в распределенных параметрах, когда скорость и давление
жидкости изменяются не только по времени, но и по длине трубопровода.
При выводе уравнения движения жидкости в топливопроводящей
магистрали примем следующие допущения: гидравлические потери по длине
трубопровода подчиняются закону
квазистационарного
турбулентного
давления жидкости; гидравлические потери на входе в трубопровод и на его
выходе не учитываются; жидкость однофазная; трубопровод – однородный.
При
таких
допущениях
динамический
процесс
в
трубопроводе,
представленном в сосредоточенных параметрах, описывается зависимостью
Lтр
dm&
+ K нл m& 2 = Pвх − Pвых ,
dt
где Lтр =
λтр =
lтр
Fтр
– акустическая емкость трубопровода; K нл =
(5.2.1)
λтр lтр
Fтр2 d тр
,
0,316
4m&
Re
–
коэффициент
гидравлических
потерь;
=
– число
Re0,125
ρπ d трν
Рейнольдса; ν – кинематическая вязкость жидкости; lтр , d тр – длина и
диаметр трубопровода; Fтр – площадь проходного сечения трубопровода; m&
176
– массовый расход жидкости; Pвх , Pвых – давление на входе в трубопровод и
выходе из него.
В малых приращениях (без учета постоянных составляющих) равенство
(5.2.1) можно переписать:
Tтр
d δ m&
+ δ m& = K1δ Pвх − K 2δ Pвых ,
dt
lтр
где Tтр =
– постоянная времени трубопровода;
Rтр
линеаризованное
K1 =
(5.2.2)
гидравлическое
сопротивление
Rтр = 2 K нл m& 0 –
трубопровода;
( Pвх )0
(P )
, K 2 = вых 0 – коэффициенты передачи трубопровода.
Rтр m& 0
Rтр m& 0
Трубопровод в сосредоточенных параметрах представляет собой
апериодическое типовое звено с соответствующими ему переходными и
частотными характеристиками.
В
некоторых
случаях
целесообразно
учитывать
объемную
податливость жидкости и стенок трубопровода, относя эту податливость к
центру трубопровода, т.е. представив его по электродинамической аналогии
в виде соединения двух участков, посередине которых размещена емкость.
Акустические
индуктивности
участков
трубопровода
находятся
так
Lтр1 = Lтр 2 = Lтр / 2 , а акустическая емкость определяется по формуле:
Cтр =
Vтр
2
ρ ж атр
, где Vтр = lтр Fтр – объем трубопровода; ρ ж – плотность
жидкости; атр = аж / 1 +
δ тр Е Ж
d тр Е м
– эквивалентная скорость звука в жидкости
с учетом податливости стенок трубопровода, δ тр – толщина стенок
2
– модуль объемной упругости жидкости в
трубопровода; Еж = ρ ж аж
трубопроводе; Е м – модуль упругости материала стенок трубопровода.
177
Если учитывается газовая каверна на входе в шнек центробежного
насоса с приведенным объемом Vкпр , то можно рассчитать резонансную
частоту трубопровода колебательного контура трубопровод - каверна.
Акустическая емкость каверны рассчитывается по формуле Ск =
Vкпр
ρ ж аж2
–
акустическая емкость каверны.
& = Cк
Для каверны справедлива зависимость m
dPвых
или в малых
dt
приращениях:
δ m& =
Cк ( Pвых )0 d δ Pвых
m& 0
dt
(5.2.3)
Зависимость (5.2.3) можно представить в виде
δ m& = Tк
где TK =
d δ Pвых
dt
(5.2.4)
CK PВЫХ 0
– постоянная времени каверны.
m& 0
Если решить совместно уравнения (5.2.2) и (5.2.4), то получим
d 2δ Pвых
d δ Pвых
TтрTк
+ Tк
+ K 2δ Pвых = K1δ Pвх , или
dt
dt
d 2δ Pвых
d δ Pвых
T
T
+
2
ς
+ δ Pвых = K ткδ Pвх ,
тк
тк
dt 2
dt
2
тк
(5.2.5)
где Tтк = TтрTк / K 2 – постоянная времени трубопровода с каверной;
2Tткς тк = Tк / K1 – коэффициент, учитывающий гидравлические потери в
колебательном контуре; K тк = K1 / K 2 – коэффициент передачи.
Учитывая, что формула (5.2.5) является выражением для колебательного
типового звена, то можно определить резонансную частоту системы
2
трубопровод-каверна: ω р ,тк = 1 − ς тк
/ Tтк , которая может повлиять на
свойства ЖРДУ при оценке продольной устойчивости РН.
178
5.3 Гидравлический демпфер для обеспечения устойчивости ракеты
Гидравлический демпфер для обеспечения устойчивости ракеты, как
следует из предыдущего раздела, должен понизить резонансную частоту
топливоподводящей магистрали для исключения совпадения этой частоты с
резонансной частотой корпуса ракеты [9, 14, 37]. Это можно обеспечить за
счет
подключения
элемента
с
упругой
объемной
податливостью.
Конструктивные схемы таких устройств представлены на рис. 5.3.1, 5.3.2.
В корпусе 1, который фланцем 6 крепится к трубопроводу системы
топливопитания двигателя, размещен сильфонный разделитель 2 жидкостной
и газовой полости (см. рис. 5.3.1). Постоянство перепада на разделителе и
минимальный его ход при колебаниях давления в системе подачи топлива
обеспечиваются подачей в газовую полость от специального источника через
штуцер 7 газа и регулированием сброса подвижным золотником 5, связанным
с днищем 4 разделителя. Такие демпферы надежны, но требуют специальной
системы подачи в них газа.
Разработка стойких к агрессивным жидкостям и герметичных
пластиков позволила создавать демпферы более простых конструкций.
Конструкция одного из таких демпферов показана на рис. 5.3.2. На
топливной магистрали устанавливается корпус 2 тороидальной формы, в
котором
размещены
заполненные
газом
пластиковые
секции
1,
удерживаемые в корпусе перфорированной вставкой З. Надежность
демпфера обеспечивается установкой нескольких секций.
Другим эффективным способом снижения собственной частоты
системы питания является уменьшение скорости распространения малых
возмущений
в
магистрали
путем
введения
в
жидкость
пузырьков
неконденсирующего газа.
179
Рис. 5.3.1. Газовый демпфер: 1 - корпус; 2 - сильфонный разделнтель; 3 - опорный
цилиндр; 4 - днище разделителя; 5 - золотник; 6 - фланец 7 - штуцер подвода газа; 8 дренажная трубка; 9, 10 - соответственно жидкостная и газовая полости
Рис. 5.3.2. Демпфер с упругими пластиковыми секциями: 1 - пластиковая секция; 2 корпус; 3 - вставка
Указанный метод был успешно реализован на ракете «Сатурн-5>,
причем для обеспечения необходимой упругости столба жидкого кислорода
потребовался вдув гелия с расходом всего лишь 0,045 кг/с.
6 СИСТЕМЫ ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ
ДВИГАТЕЛЬНЫХ УСТАНОВОК КОСМИЧЕСКИХ АППАРАТОВ
6.1 Газобаллонные реактивные двигатели
ориентации космических аппаратов
Для создания управляющих моментов относительно центра масс могут
применяться: реактивные двигатели малой тяги, работающие на запасах
180
сжатого газа азота или пролана, на продуктах разложения перекиси водорода,
двухкомпонентном самовоспламеняющемся топливе [4, 5, 6, 8, 18]. Тяга
таких двигателей может составлять от долей и единиц до десятков ньютонов.
Для
обеспечения
кратковременных
режимов
стабилизации
могут
использоваться пороховые двигатели; электрореактивные, плазменные и
ионные двигатели на КА, имеющие мощную энергетическую установку
(например, на основе ядерного реактора); маховичные системы.
Для управления относительно трех осей обычно используют комплект
из восьми реактивных двигателей. Для обеспечения надежности двигатели
дублируют, тогда комплект составляет 16 двигателей. Часто на КА
устанавливают двигатели малой тяги (от единиц до десятков ньютонов) для
обеспечения точных и экономичных режимов и двигатели большой тяги (до
сотен Ньютонов) для обеспечения стабилизации КА в момент работы
корректирующего двигателя или для совершения ускоренных разворотов.
При этом комплект может составлять 24 двигателя. При применении в
качестве рабочего тела запасов сжатого газа обычно используют азот или
пропан. ЖРД МТ для ориентации относительно центра масс обычно входят в
состав корректирующей двигательной установки и питаются топливом из ее
баков, что позволяет уменьшить массу двигательных установок на КА в
целом.
Рассмотрим типы двигательных установок для ориентации КА. Для
полной ориентации космического аппарата необходимо осуществлять
управление им путем поворотов вокруг трех осей. Простейший тип такого
комплекса для поворота вокруг осей КА представлен на рис. 6.1.1 [45].
Рис. 6.1.1 Схема системы реактивных
двигателей, работающих на сжатом газе: 1
– баллон со сжатым газом; 2 – клапан; 3 –
редуктор; 4 – коллектор; 5 – реактивные
двигатели ориентации
В качестве рабочего тела в нем используется сжатый газ (обычно азот),
хранящийся в баллоне 1 под большим давлением. Запорный клапан 2
181
отделяет баллон от остальной системы. При его открытии сжатый газ течет к
редуктору 3, в котором его давление понижается до некоторой заданной и
постоянной по мере падения давления в баллоне величины. Величина
давления за редуктором является рабочим давлением для установленных за
ним реактивных двигателей 5. При открытии такого клапана подведенный к
нему с помощью коллектора 4 газ устремляется во внешнее пространство,
причем для увеличения скорости истечения газа (а следовательно, и
реактивной силы) его расширение происходит в сопле Лаваля. Открытие и
закрытие
двигателей
(клапанов)
5
происходит
в
зависимости
от
электрических сигналов, поступающих к каждому из них из блока логики.
Тяга реактивного двигателя Р может быть выражена, как известно,
следующим образом:
P = m& c w
(6.1.1)
& c - секундный расход массы; w - скорость истечения.
где m
В технике нередко рассматривают не массовый, а весовой секундный расход
Gc = gm& c .
(6.1.1)
P = Gc I c ,
(6.1.2)
Тогда
где I c = w / g называют удельным импульсом тяги. В тех случаях, когда
важна не тяга, а импульс тяги за время Δt , из предыдущей формулы сразу
получаем:
PΔt = I c ΔG ,
(6.1.3)
где ΔG - весовые затраты газа за время Δt .
Таким образом, для получения заданного импульса с возможно
меньшими весовыми затратами рабочего тела ΔG надо стремиться к
получению в реактивных двигателях ориентации как можно более высоких
удельных импульсов. Из предыдущих формул видно, что это эквивалентно
требованию получения как можно более высоких скоростей истечения.
Скорость истечения зависит от природы истекающего газа, степени его
182
расширения в сопле Лаваля и степени подогрева. Очевидно, что для
рассматриваемого простейшего типа реактивных двигателей ориентации
путь повышения удельной тяги за счет подогрева газа исключен. Поэтому
рассматриваемая
система
исполнительных
органов
обладает
низкой
экономичностью.
Процесс
ориентации
космического
корабля
характеризуется
многократными включениями и выключениями реактивных двигателей.
Характер изменения тяги за время одного включения и выключения показан
на рис. 6.1.2.
В момент времени
τ 1 приходит электрический сигнал на открытие
клапана, однако фактическое его открытие начинается несколько позже, в
момент
τ 2 , и заканчивается в момент τ 4 . За время от τ 2 до τ 4 постепенно
нарастает тяга двигателя P , достигнув ко времени
τ 4 максимального
значения P0 .
Рис. 6.1.2. Зависимость тяги двигателя от времени
Начиная с момента
τ 4 , клапан остается открытым и тяга P сохраняет
постоянное значение. В момент
τ 5 приходит электрический сигнал на
закрытие клапана, однако, как и при открытии, исполнение команды будет
происходить с некоторым запаздыванием - тяга начинает уменьшаться с
момента времени
τ 6 . К моменту времени τ 7 клапан (двигатель) уже
полностью закрыт, но продолжает происходить истечение газа, находящегося
к этому моменту в полостях за клапаном и в сопле.
183
Можно ввести эффективное время запаздывания на открытие клапана
t3 − t1 = τ 0 , определив τ 3 из равенства
t4
(t4 − t3 ) P0 = ∫ Pdt
(6.1.4)
t1
Совершенно аналогично время запаздывания на закрытие клапана τ 3 = t8 − t5
определяется из равенства ∞
?
(t8 − t5 ) P0 = ∫ Pdt
(6.1.5)
t5
Существенным при этом является то, что несмотря на бесконечно
большое время истечения газа из полузамкнутого объема в вакуум, величина
создаваемого им импульса конечна.
Таким образом, при расчетах динамики космического аппарата можно
считать, что тяга реактивного двигателя ориентации мгновенно достигает
своего расчетного (максимального) значения P0 и мгновенно же падает до
нуля,
однако
появление
тяги
запаздывает
относительно
электрического сигнала на клапане на величину
запаздывания на закрытие равно
появления
τ 0 , а аналогичное время
τ з . Эта картина показана на рис. 6.1.2
пунктирной линией.
Как видно из приведенного описания, тяга реактивного двигателя
ориентации
считается
постоянной.
Когда
возникает
необходимость
уменьшения тяги сравнительно с P0 , то в некоторых случаях можно пойти на
импульсную работу двигателей, изображенную па рис. 6.1.3, причем
величина минимальной длительности одного импульса
τ 1 по существу
определяет минимально возможный импульс, допускаемый системой
исполнительных органов.
184
Рис. 6.1.3. Диаграмма импульсной работы
реактивных двигателей ориентации
Эта величина является одной из основных динамических характеристик
исполнительных органов. Для весьма приближенной, но в целом верно
передающей суть дела оценки
τ 1 следует уменьшить время полного
открытия клапана до минимально возможной величины. Дать сигнал на
закрытие клапана в то самое мгновение, когда тяга достигнет расчетной
величины, т. е. положить t5 − t4 = 0 . Назвав эффективным временем выхода
на режим величину τ в = t4 − t3 , можно написать, что
τ1 = τ в + τ 3
(6.1.6)
а величины P0τ1 , P0τ в и P0τ 3 назвать соответственно минимально возможным
импульсом, импульсом выхода на режим и импульсом последействия. Таким
образом, минимально возможный импульс складывается из импульса выхода
на режим и импульса последействия:
P0τ1 = P0τ в + P0τ 3
Если бы время
τв
(6.1.7)
и соответственно время
τ 3 были у всех клапанов
величинами одного порядка, то можно было бы говорить о том, что
минимально
возможный
импульс
прямо
пропорционален
величине
номинальной тяги, развиваемой реактивным двигателем ориентации. В
действительности эта зависимость сложнее, но формула (6.1.7) правильно
передает основное свойство двигателей рассматриваемого типа — вместе с
ростом
номинального
значения
тяги
увеличивается
и
минимально
возможный импульс.
185
Для уменьшения минимально возможного импульса можно, казалось
бы, дать сигнал на закрытие до того, как клапан полностью открылся, однако
этот путь имеет ряд существенных недостатков. Более перспективным
является уменьшение минимального импульса за счет уменьшения времени
τ 4 − τ 1 и τ 7 − τ 5 , то есть за счет увеличения быстродействия клапана.
Именно поэтому важную роль играет максимальная частота чередующихся
сигналов на открытие и закрытие клапана, которую он еще в состоянии
отработать.
Минимально возможный импульс увеличивается вместе с тягой
реактивного двигателя ориентации. Поэтому весьма эффективным способом
получения малого единичного импульса является уменьшение тяги P0 .
Однако этот путь таит в себе другие трудности. В некоторых режимах
реактивные двигатели ориентации должны работать с большой нагрузкой,
развивая максимально возможную тягу в течение значительного времени.
Это особенно относится к переходным режимам. Важно подчеркнуть, что
поэтому система исполнительных органов характеризуется как минимально
возможным импульсом, так и максимальной тягой. В совокупности эти две
величины определяют динамический диапазон возможностей системы.
Иногда
берут
отношение
величины,
характеризующей
наибольшее
возможное силовое воздействие, к величине, характеризующей наиболее
тонкое воздействие, как правило, связанное с реализацией точных режимов,
и называют это отношение диапазоном регулирования. В рассматриваемом
случае такое отношение будет размерной величиной, так как сравниваются
величины разной физической природы — сила и импульс. Если все же взять
отношение минимально возможного импульса к тяге двигателя ориентации в
установившемся режиме, то получится уже известная из предыдущего
величина минимальной длительности одного импульса
τ 1 . Поэтому
получение большого диапазона регулирования связано с созданием
достаточно быстродействующих клапанов.
186
Главным недостатком рассмотренного типа реактивных двигателей
ориентации, работающих на сжатом газе, является малый удельный импульс
и большой вес баллонов для хранения сжатого газа. Известное уменьшение
веса емкостей для хранения бортовых запасов рабочего тела можно
получить, если перейти от использования сжатых газов к использованию
сжиженных газов. Однако в последнем случае давление, при котором может
храниться сжиженный газ при обычной температуре, должно быть не
слишком велико. В целом схема системы исполнительных органов сохраняет
и в этом случае вид, изображенный на рис. 6.1.1, с тем лишь дополнением,
что где-то до редуктора 3 к рабочему телу следует подводить тепло для его
испарения. Это несколько усложняет конструкцию системы за счет
теплообменных устройств, даже если подводимое тепло заимствуется от
работающей
в
космическом
корабле
аппаратуры,
способствуя
ее
охлаждению.
6.2 Однокомпонентные ЖРД малой тяги
Существенное уменьшение веса системы исполнительных органов
нередко можно получить, если перейти к двигателям с более высокими
удельными импульсами, получая их за счет подогрева рабочего тела в
двигателе. Наиболее простым типом таких двигателей являются те, которые
используют одну компоненту, например перекись водорода. Схема такой
системы дана на рис. 6.2.1 [5, 17, 18, 45, 50].
Рис. 6.2.1. Схема системы реактивных
двигателей ориентации с использованием
однокомпонентного топлива: 1 — баллон;
2—клапан; З - редуктор; 4 — бак с
топливом; 5 – коллектор; 6 – камера
разложения топлива; 7 - реактивные
двигатели ориентации
187
Сжатый в баллоне 1 газ (например, азот) после открытия клапана 2
понижает свое давление в редукторе З до заданной постоянной величины
давления подачи перекиси водорода. Газ под этим давлением попадает в
емкость 4 с перекисью водорода, и если включится один из реактивных
двигателей ориентации 7, то по коллектору 5 перекись водорода поступит в
него, выдавливаемая из емкости 4 сжатым газом. Каждый двигатель имеет в
своем корпусе камеру 6, в которой под действием соответствующих
катализаторов перекись водорода разлагается с одновременным сильным
нагревом. В результате в сопло Лаваля включенного двигателя поступает
смесь сильно нагретых продуктов разложения — кислорода и паров воды.
Высокая температура продуктов разложения и обусловливает повышенные
по сравнению с холодными газами удельные импульсы. Более высокие
удельные импульсы могут обеспечить двухкомпонентные двигатели.
6.3 Двухкомпонентные ЖРД малой тяги
В двухкомпонентных двигательных установках горючее и окислитель
хранятся раздельно. При смешении горючего и окислителя в камере сгорания
двигателя происходит воспламенение, и продукты сгорания оказываются
нагретыми до температур более высоких, чем те, которые достигаются при
разложении однокомпонентного топлива. Следует, однако, иметь в виду, что
указанные компоненты при поступлении в камеру сгорания должны быть
тщательно смешаны и поданы в нужной пропорции, чтобы горение было
полным, чего очень трудно достигнуть при работе в режиме минимальных
импульсов.
Схема
системы
реактивных
двигателей
ориентации
с
использованием двухкомпонентного топлива приведена на рис. 6.3.1 [45, 48].
Из емкостей для хранения горючего и окислителя 4 и 5 компоненты
поступают по коллекторам б и 7 к двигателям 8. Вытеснение жидких
компонент из баков происходит, как и в предыдущем случае, с помощью
нейтральных газов, запасенных в баллонах 1, связанных с емкостями 4 и 5
через клапаны 2 и редукторы З.
188
Рис. 6.3.1. Схема системы реактивных
двигателей ориентации с использованием
однокомпонентного топлива: 1 — баллон;
2—клапан; З - редуктор; 4, 5 — баки
горючего и окислителя; 6, 7 –
соответствующие
коллекторы;
8
–
реактивные двигатели ориентации
График
нарастания
тяги
и
в
этих
случаях
имеет
характер,
представленный на рис. 6.1.2. И здесь целесообразно ввести времена
τ0, τв ,
τ 3 , τ 1 и определить минимально возможный импульс как P0τ или P0(τ +τ ) .
1
в
3
Однако следует предупредить, что в отличие от двигателей ориентации,
работающих на сжатом газе, для двигателей, связанных с химическими
реакциями, идущими непосредственно перед его истечением через сопло,
чрезвычайно актуальным становится вопрос об изменении удельного
импульса при малых временах включения двигателей. То есть, в общем
высокие величины удельных тяг, которые приводятся в справочниках,
даются (если не делается особых оговорок) для установившегося режима
работы двигателя. Поэтому если стремиться получать минимальный импульс
за счет только импульса выхода на режим и импульса последействия, то
величина удельного импульса для такого кратковременного включения
двигателя может оказаться много меньше той, которая соответствует
установившемуся режиму работы.
Из сравнения описанных выше двигательных установок малой тяги
следует, что увеличение сложности компенсируется возрастающим вместе с
нею удельным импульсом. Наиболее правильно сравнивать их, учитывая как
вес собственно системы, так и вес топлива (или сжатого газа) вместе с весом
содержащих
их
емкостей.
Впрочем,
рассматривая
реализованные
конструкции, можно утверждать, что в большинстве случаев простейшие
системы, использующие сжатый газ, применяются на сравнительно
189
небольших космических аппаратах автоматического типа, в то время как для
больших аппаратов и космических кораблей предпочитаются более
совершенные системы.
6.4 Комплексная двигательная установка космических аппаратов
С целью совершенствования массовых характеристик КА было
признано целесообразным на ЖРДУ возложить задачи как коррекции
орбиты, так и торможения при спуске спускаемого аппарата на поверхность
земли, а также ориентации и стабилизации КА на околоземной орбите. В
результате была создана комплексная двигательная установка, которая
выполняет все указанные требования. В состав комплексной двигательной
установки входят (рис. 6.4.1) [21]:
- корректирующе-тормозной ракетный двигатель, состоящий из камеры
сгорания 10, установленной в кардановом подвесе и пускоотсечных клапанов
7,
8,
12
и
13,
обеспечивающих
многоразовый
пуск
и
останов
корректирующего тормозного двигателя (КТД);
- система жидкостных ракетных управляющих двигателей малой тяги,
объединенных в два коллектора 1 и 11;
- топливные баки 1, 2, 37 и 38 с устройствами, обеспечивающими подачу
топлива в КТД и ЖРДМТ;
- система наддува, состоящая из шар-баллонов 39 высокого давления и
арматурьг (электроклапаны, редуктор, трубопроводы), обеспечивающей
подачу газа наддува и управления;
- сигнализаторы давления наддува баков, подачи управляющего газа в
пневмоклапаны, датчики системы телеметрического контроля;
- приводы для качания камеры в кардановом подвесе в двух взаимно
перпендикулярных плоскостях;
- средства обеспечения теплового режима комплексной двигательной
установки;
190
- кабельная сеть;
- рама для размещения систем и агрегатов комплексной двигательной
установки с узлами крепления к КА.
Рис. 6.4.1. Принципиальная схема комплексной двигательной установки: 1, 2, 37, 38 —
топливные баки с окислителем; 3, 9, 11, 23, 29, 36, 40, 44 — датчики давления окислителя,
горючего; 4, 41, 43 — электропневмоклапаны; 5, 6, 34, 35 — клапаны редукционные; 7, 8,
12, 13 — пневмоклапаны; 10 — камера сгорания; 14, 32, 45, 46, 47, 48 — горловины
заправочные; 15, 33 — сигнализаторы давления; 16, 20, 26, 28 — электрожидкостные
клапаны; 17, 18, 19 — двигатели для управления КА относительно центра масс; 21, 31 —
пневмоклапаны; 22, 27— электропневмоклапаны; 24, 30 — гидроаккумуляторы; 25 —
шар-баллон азота; 39 — шар-баллоны гелия; 42 — редуктор
Корректирующий тормозной двигатель создает импульсы тяги для
изменения скорости движения КА в направлении оси аппарата. Путем
поворота камеры в кардановом подвесе создаются поперечные силы,
используемые для управления угловым движением КА в двух плоскостях.
ЖРДМТ создают импульсы тяги для небольших изменений скорости КА по
трем осям и для управления угловым движением аппарата.
Запас газа (гелия) для вытеснения топлива и управления находится в
трех шар-баллонах.
191
Пуск (останов) КТД, ЖРДМТ производится подачей (снятием)
системой управления КА напряжения на соответствующие электроклапаны.
Редуктор поддерживает постоянным давление вытесняющего и
управляющего газов.
Запасы
компонентов
топлива
комплексной
двигательной
установки
размещены в четырех баках (двух баках окислителя 1, 2 и двух баках
горючего 37, 38). Баки сферической формы выполнены из алюминиевого
сплава.
Баки
имеют
пластически
деформируемые
перегородки
(“диафрагмы”), отделяющие запасы компонентов топлива от вытесняющего
газа.
На
линиях
расхода
компонентов
между
баками
установлены
дроссельные шайбы, обеспечивающие равенство расходов, потребляемых из
обоих баков.
Для исключения большого снижения давления на входе в камеру при
израсходовании топлива в одном из баков дроссельные шайбы шунтированы
редукционными клапанами 5 и 6, 34 и 35, открывающимися при увеличении
перепада давлений.
Питание топливом микрожидкостного ракетного двигателя (МЖРД)
осуществляется из промежуточных емкостей гидроаккумуляторов (ГА),
которые
опорожняются
при
расходовании
топлива
и
периодически
наполняются.
ГА обеспечивают равенство расходов и давлений компонентов топлива
на входе в МЖРД, а также позволяют определить количество топлива,
потребляемого ЖРД по числу наполнений ГА.
ГА
представляет
перегородкой
с
собой
сильфоном,
емкость,
имеющим
разделенную
небольшую
на
две
части
жесткость
с
сигнализаторами положения перегородки в крайних положениях. В одной
части емкости находится компонент, в другой — газ (азот) под нужным
давлением. Для обеспечения равенства давлений газовые полости ГА
соединены трубопроводами, для уменьшения изменений давления при
192
изменении количества жидкости в жидкостных полостях ГА к трубопроводу
присоединен
дополнительный
объем
25
(шар-баллон).
Необходимое
давление в шар-баллоне создается при заправке и зарядке комплексной
двигательной установки.
Открытие и прекращение наполнения ГА производится клапанами 21,
22 и 27, 31 по сигналам сигнализаторов положения перегородки.
Для повышения надежности комплексной двигательной установки —
сохранения запаса топлива при отказах МЖРД объединены в две группы с
общими для группы трубопроводами подвода компонентов (коллекторами).
На входе в коллекторы установлены электрожидкостные клапаны 16, 20, 26 и
28. Клапаны срабатывают при поступлении импульса напряжения на
обмотки электромагнитов от системы управления КА.
Перед первым включением комплексной двигательной установки
производится предварительный наддув газовых полостей топливных баков.
По команде “Предварительный наддув” система управления КА подает
команду на открытие клапанов 41 и 43. Гелий из шар-баллонов 39 поступает
в редуктор 42 и далее в газовые полости баков 1, 2, 37 и 38. Давление в баках
повышается. При достижении в баках расчетного давления срабатывает
сигнализатор давления 33 (контакты размыкаются). При повышеши давления
гелия за редуктором 42 до давления настройки редуктор закрывается и
прекращается доступ гелия в баки. По команде “Окончание наддува”
снимается напряжение и клапаны закрываются, прекращается подача гелия в
полости бака.
В случае замыкания сигнализатора давления (давление в баках
понижается ниже расчетного) также подается команда на открытие клапана.
При
достижении
в
баках
давления,
равного
давлению
настройки
сигнализатора давления 33, контакты сигнализатора размыкаются.
По команде “Окончание наддува” клапан закрывается. Прекращается
подача гелия в полости баков.
193
По команде “Пуск” открывается клапан 4, гелий из редуктора
поступает в управляющие полости клапанов 7, 8, 12 и 13. Клапаны
открываются. Компоненты топлива, поступая в камеру КТД, сгорают.
Давление в камере повышается и двигатель выходит на номинальный режим.
Для останова КТД по командам “Окончание наддува” и “Останов”
закрываются клапаны 41, 43 и 4. Гелий из управляющих полостей клапанов
стравливается в окружающее пространство. Клапаны 7, 8, 12 и 13
закрываются, прекращая доступ топлива в камеру КТД.
Перед первым включением КТД производится вакуумирование
полостей МЖРД и коллекторов срабатыванием электрожидкостных клапанов
МЖРД.
Перед работой системы управления движения КА по командам
системы управления КА открываются клапаны 16, 20, 26 и 27 — компоненты
топлива поступают в коллекторы. По командам системы управления
открываются клапаны соответствующих ЖРД; топливо поступает в камеры
сгорания МЖРД. МЖРД выходят на номинальный режим работы. Останов
производится снятием напряжения с соответствующих клапанов МЖРД.
При срабатывании контактов первой группы ГА подается напряжение
на клапаны 22 и 27. Клапаны открываются, пропуская газ управления к
пневмоклапанам
21
и
31.
Открываясь,
пневмоклапаны
пропускают
компоненты топлива из баков на заполнение ГА. Заполнение ГА
заканчивается срабатыванием контактов второй группы сигнализаторов. При
этом закрываются клапаны 4 и 27 и пневмоклапаны 21 и 31, прекращается
поступление компонентов топлива в ГА.
6.5 Коррекция динамических характеристик ЖРД малой тяги
Динамическая стабилизация параметров подачи компонентов топлива
на входе в ЖРДМТ приводит к существенному увеличению импульса
давления в камере сгорания при работе двигателей в режиме одиночных
включений [12, 13, 15, 16]. Одновременно изменяются массовые расходы
окислителя
и
горючего
за
импульс.
Следовательно,
степень
194
нестационарности входных параметров влияет па величину расходного
комплекса, характеризующего экономичность камеры сгорания ЖРДМТ. Для
стабилизации гидродинамических процессов в системе топливопитания были
разработаны корректирующие устройства в виде акустического RC –
фильтра.
Переходные процессы при одиночных включениях ЖРДМТ тягой 100
Н и 400 Н с длительностями импульсов 0,02, 0,03 и 0,05 с, полученные при
испытаниях на огневом вакуумном стенде, показаны на рис. 6.5.1.
Из графиков видно, что разработанные демпфирующие устройства
обладают высокой эффективностью. В исходном динамическом состоянии
стендовой системы топливопитания величина провала давления при
включении двигателей тягой 100 Н и 400 Н составляла 0,5 МПа и 1,0 МПа
соответственно, после установки демпферов амплитуды колебаний давления
уменьшились более чем в 5 раз, значительно уменьшилась и длительности
переходных процессов в магистралях после включения и выключения
двигателей.
Изменение динамических условий подачи компонентов топлива в
ЖРДМТ оказывает существенное влияние как на процесс формирования
импульса давления в камере сгорания, так и на величину этого импульса.
Устранение нестационарности входных параметров приближает форму
импульса к прямоугольной за счет увеличения темпа роста давления в камере
сгорания после самовоспламенения компонентов топлива (особенно это
заметно для двигателя тягой 400 Н).
Это приводит к уменьшению времени запаздывания воспламенения.
Время
τ 3 состоит из времени задержки самовоспламенения τ з.в (интервал
времени от момента начала поступления второго компонента топлива в
камеру сгорания до момента воспламенения) и времени заполнения
заклапанных полостей двигателя, причем на обе эти составляющие
оказывают влияние входные условия подачи компонентов. При отсутствии
демпфирования колебаний давления предпламенные процессы в двигателе и
195
процесс самовоспламенения протекают при давлениях подачи компонентов,
существенно ниже настроечных.
Так,
при
открытии
электроклапанов двигателя тягой
400 Н входные давления падают до
0,8 МПа при настроечном значении
1,8 МПа, этому соответствуют и
повышение значения мгновенных
расходов компонентов. В то же
время
результаты
исследования
влияния входных параметров на
время
задержки
самовоспламенения
что
для
показывают,
ЖРДМТ
размерностей
и
схемами
с
различных
различными
смесеобразования
уменьшение
входных
давлений
Рис. 6.5.1 Переходные процессы при (расходов) приводит к увеличению
одиночных включениях ЖРДМТ тягой 400 Н
τ з .в .
Динамическая стабилизация на входе в двигатель за счет установки в
магистрали демпфирующих устройств увеличивает мгновенные расходы
компонентов в период запуска двигателя (см. рис. 6.5.1) и это приводит к
уменьшению времени заполнения заклапанных полостей, а также к
интенсификации предпламенных процессов в камере сгорания. В результате
происходит
уменьшение
времени
запаздывания
самовоспламенения
компонентов топлива и увеличение темпов роста давления.
Стабилизация условий подачи компонентов топлива на входе в
ЖРДМТ может оказать влияние и на протекание переходных процессов в
системе
управления
космического
аппарата,
так
как
увеличение
быстродействия двигателей приводит к уменьшению амплитуды и угловых
скоростей колебаний в предельном цикле, который устанавливается в
196
режиме
стабилизации
пространственного
положения
КА.
При
этом
уменьшаются и расходы топлива на соответствующих участках полетной
программы.
197
Список литературы
1. Анализ устойчивости и автоколебаний в нелинейных системах управления [Текст] :
Учеб. пособие / А.Н. Крючков, Е.В. Шахматов, В.П. Шорин, А.Г. Гимадиев. Самар.
гос. аэрокосм. ун-т им. С. П. Королева. - Самара, 1998. - 80 с.
2. Бакингем, А. Космические двигатели [Текст]: Состояние и перспективы / А.
Бакингем, Т. Боттс, Д. Бьюден и др.; под ред. Л. Кейвни; пер. с англ. В. И. Брухния
и др., под ред. А. С. Коротеева. - М. : Мир, 1988. - 454 с.
3. Беляев, Н.М. Системы наддува топливных баков ракет [Текст] / Н.М. Беляев. – М.:
Машиностроение, 1976. – ЗЗ6 с.
4. Беляев, А. В. Методика расчета эффективности функционирования космических
средств межорбитальной транспортировки с двигателями малой тяги [Текст] / А. В.
Беляев, В. Д. Юдицкий // Ракетно-космическая техника : труды : [сб. ст.] / Ракет.косм. корпорация "Энергия" им. С. П. Королева. - Королев, 2003. - Сер. 12, Вып. 1-2.
- С. 79-84.
5. Беляев, Н.М. Реактивные системы управления космических летательных аппаратов
/ Н.М. Беляев. - М.: Машиностроение, 1979. - 229 с.
6. Бессонов, А.И. Перспективы развития космического двигателестроения [Текст] / А.
И. Бессонов, Г. П. Калмыков, А. И. Пастухов // Полет. - 2005. - №6. - С. 16-21.
7. Волков, Е.Б. Статика и динамика ракетных двигательных установок. Книга II.
[Текст] / Е.Б. Волков, Т.А. Сырицын, Г.Ю. Мазинг. - М., Машиностроение, 1978. 320 с.
8. Воробьев, А Разработка перспективных ЖРД малых и сверхмалых тяг в составе
объединенной двигательной установки космических аппаратов / А. Воробьев //
Инженер: ежемес. ил. науч. –попул. изд. – 2010. №2. – С. 28-29.
9. Гахун Г.Г. Конструкция и проектирование жидкостных ракетных двигателей
[Текст]: учеб. для вузов по специальности "Авиац. двигатели и энерг. установки" /
Г.Г. Гахун, В.И. Баулин, В.А. Володин и др.; под общ. ред. Г.Г. Гахуна. - М. :
Машиностроение, 1989. - 424 с.
10. Гимадиев, А.Г. Выбор параметров, расчет статических и динамических
характеристик регулятора расхода топлива: [учеб. пособие] [Текст] / А. Г.
Гимадиев, Самар. гос. аэрокосм. ун-т им. С. П. Королева. - Самара : Изд-во СГАУ,
2007. - 63 с.
11. Гликман, Б.Ф. Автоматическое регулирование жидкостных ракетных двигателей
[Текст] / Б. Ф. Гликман. - 2-е изд., перераб. и доп. - М. : Машиностроение, 1989. 296 с.
12. Динамические измерения и обработка экспериментальных данных при испытаниях
гидросистем: [учеб. пособие] / М.С. Гаспаров, А.Н. Крючков, А.Б. Прокофьев, Е.В.
Шахматов. - Самара: Изд-во СГАУ, 2006. - 127 с.
13. Динамические процессы в системах двигательных установок космических
аппаратов [Текст] / [В. П. Шорин [и др.]; под ред. В.П. Шорина; Самар. гос.
аэрокосм. ун-т им. С. П. Королева. - Самара: СГАУ, 1998. - 315 с.
14. Добровольский, М.В. Жидкостные ракетные двигатели: основы проектирования
[Текст]; [учеб. для вузов по направлению подгот. бакалавров и магистров "Авиа- и
ракетостроение", специальности "Ракет. двигатели" направления подгот. дипломир.
198
специалистов "Двигатели летат. аппаратов"] / М. В. Добровольский; под ред. Д.А.
Ягодникова. - Изд. 2-е, перераб. и доп. - М. : Изд-во МГТУ, 2006. - 487 с.
15. Жуковский, А.Е. Испытания жидкостных ракетных двигателей [Текст]; /А.Е.
Жуковский, В.С. Кондрусев, В.Я. Левин, В.В. Окорочков. М.: Машиностроение,
1981. - 255 с.
16. Жуковский, А.Е. Моделирование динамических процессов в двигательных
установках с ЖРД: Учебное пособие [Текст] / А.Е. Жуковский, А.Ф. Малеев.
Самара: СГАУ, 1992. - 66 с.
17. Квасников, Л.А. Теория и расчет энергосиловых установок космических
летательных аппаратов [Текст] / Л.А. Квасников, Л.А. Латышев, Н.Н. ПономаревСтепной, Д.Д. Севрук, В.Б. Тихонов. – Изд. второе, перераб. и доп. – М.: Изд-во
МАИ, 2001. – 480с.
18. Кейвни, Л. Космические двигатели: состояние и перспективы [Текст] / Леонард Г.
Кейвни.: Пер. с англ. – М.: Мир, 1988. – 454с.
19. Колесников, К.С. Динамика топливных систем ЖРД [Текст] / К.С. Колесников,
С.А. Рыбак, Е.А. Самойлов; под общ. ред. К.С. Колесникова. - М. :
Машиностроение, 1975. - 171 с.
20. Колесников, К. С. Продольные колебания ракеты с жидкостным ракетным
двигателем [Текст] / К.С. Колесников. - М.: Машиностроение, 1971. - 260 с.
21. Конструирование автоматических космических аппаратов [Текст] / Д. И. Козлов [и
др.]; под ред. В. Д. Козлова. - М. : Машиностроение, 1996. - 447 с.
22. Крокко, Л. Теория неустойчивости горения в жидкостных ракетных двигателях
[Текст] / Л. Крокко, Чжен Синь-и; пер. с англ. Т.Ф. Алтуховой, М.О. Лернер, под
ред. Ю.Х. Шаулова. - М. : Изд-во иностр. лит., 1958. - 351 с.
23. Куландин, А.А. Энергетические системы космических аппаратов [Текст] / А.А.
Куландин, С.В. Тимашев, В.П. Иванов. – Изд. 2-е, перераб. и доп. – М.:
Машиностроение, 1979. – 320 с.
24. Лепешкин, А.В. Гидравлические и пневматические системы [Текст] : учебник : [по
специальностям 1201 "Технология машиностроения", 1202 "Пр-во летат.
аппаратов"] / А. В. Лепешкин, А. А. Михайлин ; под ред. Ю. А. Беленкова. - 3-е
изд., стер. - М. : Академия, 2006. - 332 с.
25. Лихачев, В.Я. Техническая диагностика иневмогидравлических систем ЖРД
[Текст]/ В.Я. Лихачев, А.С. Васин, Б.Ф. Гликман. - М.: Машиностроение, 1983. 204 с.
26. Махин, В.А. Динамика жидкостных ракетных двигателей [Текст] / В.А. Махин, В.Ф.
Присняков, Н.П. Белик. - М. : Машиностроение, 1969. - 833 с.
27. Методы обеспечения функциональной надежности пневмогидравлических систем и
топливных систем блока ракетно-космического комплекса / Е.А. Вакулич, В.Д.
Варивода, А.Е. Жуковский и др.; Под ред. В.П. Шорина и С.А. Петренко. – Самара:
Импульс, 1994. – 256 с.
28. Мошкин, Е.К. Нестационарные режимы работы ЖРД [Текст] / Е.К. Мошкин. - М.:
Машиностроение, 1970. - 336 с.
29. Натанзон, М.С. Продольные автоколебания жидкостной ракеты [Текст] / М.С.
Натанзон. - М., Машиностроение, 1977. - 205 с.
199
30. Натанзон, М.С. Неустойчивость горения [Текст] / М.С. Натанзон. - М. :
Машиностроение, 1986. - 248 с.
31. Харье, Д.Т. Неустойчивость горения в ЖРД [Текст] / Д.Т. Харье, Ф. Г. Рирдона;
под ред. Д.Т. Харье. - М. : Мир, 1975. - 869 с.
32. Овсянников, Б.В. Теория и расчет агрегатов питания жидкостных ракетных
двигателей [Текст]: [учеб. для авиац. спец. вузов] / Б.В. Овсянников, Б.И.
Боровский. - 3-е изд., перераб. и доп. - М.: Машиностроение, 1986. - 375 с.
33. Основы создания агрегатов автоматики пневмогидравлических систем летательных
аппаратов и двигателей [Текст] / А. Е. Жуковский [и др.] ; под ред. В. П. Шорина ;
Самар. гос. аэрокосм. ун-т им. С. П. Королева. - Самара : [НПО: Импульс], 1995 Ч.2 : Обеспечение качества динамических процессов и устойчивости систем с
агрегатами управления и регулирования. - 215 с.
34. Основы теории автоматического управления ракетными двигательными
установками [Текст] / А.И. Бабкин, С.И. Белов, Н.Б. Рутовский [и др.] – М.:
Машиностроение, 1978.- 328 с.
35. Основы теории и расчета жидкостных ракетных двигателей [Текст] : учеб для
авиац. специальностей вузов: в 2 кн. / [А. П. Васильев и др.]; под ред. В. М.
Кудрявцева. - 4-е изд., перераб. и доп. - М. : Высш. шк., 1993 - 368 с.
36. Паничкин, Н.И. Конструкция и проектирование космических летательных
аппаратов. Учебник для средних специальных учебных заведений [Текст] / Н.И.
Паничкин, Ю.В. Слепушкин, В.П. Шинкин, Н.А. Яцынин. – М.: Машиностроение,
1986. – 344с.
37. Петренко, С.А. Системы аэрокосмических аппаратов [Текст]: Учеб. пособие / С.А.
Петренко, А.Г. Гимадиев, А.Н. Нечаев; Самар. гос. аэрокосм. ун-т им. С. П.
Королева, Волж. КБ Ракет.-косм. корпорация "Энергия" им. С. П. Королева. Самара, 2000. - 174 с.
38. Пневмогидравлические системы двигательных установок с ЖРДУ [Текст] / А.Д.
Полухин, Н.Н. Миркин, В.М. Орещенко, Г.Л. Усов. - М.: Машиностроение, 1978. 239 с.
39. Пневмогидравлические системы двигательных установок с жидкостными
ракетными двигателями [Текст] / В.Н. Челомей, Д.А. Полухин, Н.Н. Миркин [и
др.]; под ред. В. Н. Челомея. - М. : Машиностроение, 1978. - 239 с.
40. Полковников, В.А. Электрические, гидравлические и пневматические приводы
летательных аппаратов и их предельные динамические возможности [Текст]: [учеб.
для вузов по направлению подгот. бакалавров и магистров "Авиа- и
ракетостроение" и специальности "Системы приводов летат. аппаратов"
направления подгот. дипломир. специалистов "Интегрир. системы летат.
аппаратов" ] / В.А. Полковников; М-во образования Рос. Федерации, Моск. авиац.
ин-т (гос. техн. ун-т). - 2-е изд., перераб. и доп. - М.: Изд-во МАИ, 2002. - 449 с.
41. Полухин, Д.А. Отработка пневмогидросистем двигательных установок ракетных и
космических аппаратов с ЖРД [Текст] / Д.А. Полухин, В.А. Морозов В.А. [и др.]. –
М.: Машиностроение, 1987. – 248 с.
42. Попов, Д.Н. Механика гидро- и пневмоприводов [Текст]: Учеб. для вузов по
направлению подгот. дипломир. специалистов в обл. техники и технологии / Д. Н.
Попов. - 2-е изд., стер. - М. : Изд-во МГТУ им. Н. Э. Баумана, 2002. - 319 с.
200
43. Присняков, В.Ф. Динамика жидкостных ракетных двигательных установок и
систем питания [Текст]: [учеб. пособие для авиац. специальностей вузов] / В.Ф.
Присняков. - М. : Машиностроение, 1983. - 248 с/
44. Рeгуляторы давления газа: Методические указания к лабораторным работам /
Самар. гос. аэрокосм. ун-т; Сост. А.Е. Жуковский, Г.В. Шестаков, Ю.К. Перлов. –
Самара: СГАУ, 1994. – 36 с.
45. Раушенбах, Б.В. Управление ориентацией космических аппаратов [Текст] / Б.В.
Раушенбах, Е.Н. Токарь, , - М.: Изд-во «Наука», Главная редакция физикоматематической литературы, 1974. – 600 с.
46. Регуляторы расхода для топливных систем двигателей летательных аппаратов
[Текст] / А.А. Горячкин, А.Е.,Жуковский, С.М. Игначков, В.П. Шорин; под ред.
акад. РАН В.П. Шорина. – М.: Машиностроение, 2000. – 200 с.
47. Сафранович, В.Ф. Маршевые двигатели космических аппаратов [Текст] : выбор
типа и параметров [Текст] / В. Ф. Сафранович, Л.М. Эмдин. - М.: Машиностроение,
1980. - 240 с.
48. Свербилов, В.Я. Гидропривод и гидравлические средства автоматики
[Электронный ресурс] : электрон. учеб. пособие / В.Я. Свербилов, А. Б. Прокофьев;
Самар. гос. аэрокосм. ун-т им. С. П. Королева. - Электрон. текстовые дан. - Самара
: СГАУ, 2006. – 152 с.
49. Теория линейных систем автоматического регулирования двигателей летательных
аппаратов: учеб. пособие [Текст] / А.Г. Гимадиев, А.Н. Крючков, А.Б. Прокофьев,
Е.В. Шахматов, В.П. Шорин. - Самара : СГАУ, 2006. - 183 с.
50. Тимнат, И. Ракетные двигатели на химическом топливе [Текст] / И. Тимнат; пер. с
англ. В. А. Вебера, С. М. Фролова. - М. : Мир, 1990. - 292 с.
201