АЛГОРИТМ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ЗОНДА
advertisement

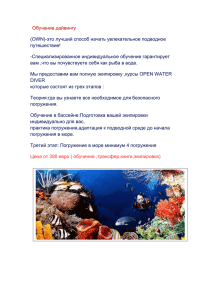
Известия ТРТУ «Экология 2004 – море и человек» БИБЛИОГРАФИЧЕСКИЙ СПИСОК НСАМ 215-ХС. Атомно-абсорбционное пламенно-фотометрическое определение бария после соосаждения его с сульфатом свинца. М. 1985. 2. Стандарт предприятия. Многоэлементный рентгенорадиометрический анализ донных осадков и магматических горных пород. Владивосток, 1992. 3. РД 52.10.556-95 Методические указания. Определение загрязняющих веществ в пробах морских донных отложений и взвеси. – М.: Гидрометеоиздат, 1996. 1. АЛГОРИТМ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ЗОНДА ПО ИЗМЕРЕННЫМ ЗНАЧЕНИЯМ ГИДРОСТАТИЧЕСКОГО ДАВЛЕНИЯ, СКОРОСТИ ЗВУКА И СОЛЕНОСТИ МОРСКОЙ ВОДЫ С.А. Васильев, В.Ю. Романов, И.И. Микушин, Е.С. Муравьева, Г.Н. Серавин Для определения вертикального распределения скорости звука (ВРСЗ) в измерительном зонде аппаратуры измерения скорости звука обычно размещаются измерительные преобразователи скорости звука и гидростатического давления. Глубину погружения зонда можно определить по следующей формуле: 1 n 1 1 ( Pi − Pi −1 ), + (1) ∑ 2 i =1 g i ρ i g i −1 ρ i −1 Zn – глубина погружения зонда, м; gi=9,7805(1+5,3·10-3Sinφ)+2,2·10-4Pi – ускорение свободного падения на i-м горизонте погружения зонда, м/с2; φ – широта места проведения измерений, град; Pi = Pi(Z)+(Pa – P0) – полное давление, действующее на зонд на i-м горизонте, Pi(Z) – гидростатическое давление (давление водяного столба на i-м горизонте, МПа; Pa – атмосферное давление на месте и P0 – во время проведения градуировки (поверки) измерительного преобразователя гидростатического давления, МПа; 3 ρi – плотность морской воды на i-м горизонте, кг/м . Горизонту i –1 соответствует поверхность моря, т.е. Pi-1(Z) = 0. Zn = где Плотность морской воды на каждом горизонте в общем случае зависит от температуры Т, солености S и давления Р, то есть ρ=f(T,S,P). (2) В океанологии принято иметь дело с условной плотностью морской воды σ=f(T,S,P). В системе СИ плотность морской воды можно выразить через ее условную плотность следующим образом: ρ=1000+ σ (T,S,P). (3) Как следует из соотношения (1), для определения глубины погружения зонда Zn (значения n-го горизонта) необходимо знать зависимость от полного давления Р= Pi по глубине в месте проведения измерений ускорения свободного падения gi(φ, Pi) и плотности морской воды ρi(Ti, Si, Pi) на i-х горизонтах. Если значение gi(φ, Pi) можно непосредственно вычислить, то для определения ρi необходимо знать не только давление Pi, но и температуру Ti и соленость Si на i-х горизонтах. В работе [1] предложено использовать при расчетах глубины погружения зонда до 1000 м по измеренным значениям гидростатического давления для откры- 10 Секция методов и средств экологического мониторинга водных районов тых районов Мирового океана среднюю по глубине плотность морской воды, равную 3 3 ρ=1,027·10 кг/м . Известно, что скорость звука в морской воде также зависит от температуры, солености и полного давления, то есть C=f(T, S, P). (4) Предложено много эмпирических формул, отображающих зависимость скорости звука в морской воде (4) от ее температуры, солености и давления. В настоящее время наиболее точной считается формула Дель Гроссо [3] и ее улучшенный вариант – формула из таблиц ГСССД 202-02, утвержденная Госстандартом [4] . Из соотношения (4) следует, что по скорости звука и полному давлению можно определить соленость морской воды, если известна ее температура. Практически это приводит к необходимости размещения в зонде измерителя скорости звука кроме измерительных преобразователей скорости звука и гидростатического давления также дополнительного измерительного преобразователя температуры, что и предложено ранее, в работе [2]. В свою очередь, из соотношения (4) следует, что по скорости звука и полному давлению можно определить температуру морской воды, если известна ее соленость, то есть T=f(C, S, P). (5) К настоящему времени не получен полином, однозначно отображающий зависимость (5), поэтому температура морской воды может быть найдена путем численного решения уравнения (4) (например, формулы Дель Гроссо) относительно Ti при известных значениях Сi(Ti, Si, Pi), Si и Pi. Определив Ti, далее можно найти по (3) плотность воды ρi на каждом i-м горизонте. Для зондов, предназначенных для работы в океане на глубинах до 2 000 м, можно использовать более простую формулу для расчета условной плотности [5] σ (T , S , P ) = 28,52 − 0,073 ⋅ T − 0,00469 ⋅ T 2 + + (0,802 − 0,002 ⋅ T ) ⋅ ( S − 35) + 0,46 ⋅ P, где S, ‰; T, °C; P, MПа. (6) Вычислив для каждого i-го горизонта gi и определив по Si, Pi и Ci плотности воды ρi, по соотношению (1) можно определить фактическую глубину погружения зонда Zn. Из соотношения (1) нетрудно получить выражение для относительной погрешности определения глубины погружения зонда ∆Z ∆P ∆ρ ср ∆g = − − , (7) Z P g ρ ср где символом ∆ обозначены абсолютные погрешности соответствующих величин; ρср – среднее значение плотности морской воды на глубине погружения зонда; ∆g легко определяется, если известны φ и P. Значения ∆ρi на различных горизонтах в общем случае могут иметь разные знаки, поэтому ∆ρср ≤ ∆ρi = ∆ρ, а ρср ≈ ρi ≈ ρ, тогда с учетом изложенного запишем ∆Z ∆P ∆ρ (8) . ≤ − ρ Z P Из зависимости (2) можно получить общее выражение для абсолютной погрешности определения плотности, равное 11 Известия ТРТУ «Экология 2004 – море и человек» dρ dρ dρ ∆S + ∆T + ∆P . (9) dS dT dP Из зависимости (3) можно найти выражение для абсолютной погрешности определения скорости звука dC dC dC ∆C = ∆T + ∆S + ∆P , (10) dT dS dP откуда получим выражение для абсолютной погрешности определения температуры −1 dC dC dC ∆T = ∆C − ∆S − ∆P . (11) dS dP dT Подставим выражение (11) в соотношение (10), получим ∆ρ = dρ dС dC dρ dC dC − ∆C + ∆S + dT dT dT dT dS dS −1 ∆ρ = dρ + dP −1 −1 − dρ dC dC ∆P . dP dT dP (12) Подставим соотношение (12) в выражение (8) и получим следующее соотношение для относительной погрешности определения глубины погружения зонда для данного случая: −1 −1 1 dρ dC 1 dρ dρ dC dC ∆Z ≤− − ∆C − ∆S + ρ dT dT ρ dS dT dT dS Z −1 (13) 1 1 dρ dρ dC dC + − − ∆P. P ρ dP dT dT dP Из соотношений (4), (3) и (6) находим частные производные, которые содержатся в выражении (13): dC dT S , P = 5,011 − 1,102 ⋅ 10 −1T + 66645 ⋅ 10− 4 T 2 − 1,275 ⋅ 10 − 2 S + + 1,94 ⋅ 10− 4 T ⋅ S ; dC dS T , P = 1,329 − 3,29 ⋅ 10 − 4 S − 1,275 ⋅ 10 − 2 T + 9,684 ⋅ 10 − 5 T 2 ; dC dP T , S = 1,59 + 6,477 ⋅ 10 − 2 T − 4,466 ⋅ 10 − 6 T 3 + 4,95 ⋅ 10 − 5 T ⋅ S 2 − − 3,473 ⋅ 10 − 3 T ⋅ S ; dρ dT S , P = −(3 ⋅ 10 − 3 + 9,4 ⋅ 10− 3 T ); dρ dS T , P = 8,02 ⋅ 10 −1 − 2 ⋅ 10 − 3 T ; dρ dP T , S = 4,6 ⋅ 10−1. (14) По соотношениям (14) вычисляем значения частных производных для солености S=35 ‰ и некоторых значений температуры морской воды, которые приведены в табл.1. Нетрудно убедиться, что для глубин погружения зонда Z<2 000 м в соотношении (13) 12 Секция методов и средств экологического мониторинга водных районов −1 лучим Например 1 1 dρ dρ dC dC >> − . P ρ dP dТ dТ dP для Z≈2 000 м (Р≈20 МПа), S=35 ‰ и (15) Т≈15˚С согласно табл.1 по- 1 >> 5,6 ⋅10 −4. 20 Таблица 1 Температура, °С 0 4,56 1,34 1,59 – 0,003 0,8 0,46 1,0285 (d С/dT)S,P мс-1/°С (dC /dS)T,P мс-1/ ‰ (d С/dP)S,T мс-1/МПа (d ρ/dT)S,P кгм—3/°С (d ρ/dS)T,P кгм—3/‰ (d ρ/dP)S,T кгм—3/МПа ρ 103 кг/м3 15 3,56 1,17 1,63 – 0,14 0,77 0,46 1,026 30 2,06 1,04 1,58 – 0,28 0,74 0,46 1,0217 Принимая во внимание (15), соотношение (13) можно переписать в следующем виде: (16) ∆Z ∆P . ≤ − A1 ⋅ ∆C − B1 ⋅ ∆S + Z P Так как значения S, P и C статистически независимы, то на практике имеем ∆Z ∆P 2 2 ≤ ( A1 ⋅ ∆C ) + (B1 ⋅ ∆S ) + Z P где в (16) и (17) −1 A1 = 2 1/ 2 , (17) −1 1 dρ dC 1 dρ dρ dC dC − , B1 = . ρ dT dT ρ dS dT dT dS (18) Пользуясь данными табл. 1, вычислим по (18) значения А1 и В1 для S=35 ‰, которые приведены в табл. 2. Таблица 2 Температура, Т °С 15 30 –3,8·10-5 –1,3·10-4 8·10-4 8,6·10-4 Из табл. 2 видно, что при температуре воды Т<30 °С точность определения глубины погружения зонда по S, P и C при значении ∆Р≈0 будет зависеть в основном от погрешности ∆S данных по солености морской воды, требования к которой в настоящее время будут относительно невысоки (∆S<1 ‰). Отсюда следует, что в большинстве районов Мирового океана, в которых температура в поверхностных слоях не достигает 30 °С, а на глубинах свыше 100 м почти всегда ниже 15 °С, достаточно точное для практики определение глубины погружения зонда измерителя скорости звука по гидростатическому давлению можно получить, не размещая в нем дополнительного измерительного преобразователя солености (электропроводности) морской воды. В этом случае возможно использование А1, 1/мс-1 В1, 1/‰ 0 –6,4·10-7 7,8·10-4 банка статистических данных о вертикальных распределениях солености в районе 13 Известия ТРТУ «Экология 2004 – море и человек» измерений, погрешность которых всегда ∆S<1 ‰ относительно фактических значений солености в данном районе. Были проведены на ПЭВМ численные эксперименты, имитирующие определение глубины погружения зонда измерителя скорости звука в воде по значениям гидростатического давления P, скорости звука С и солености S. Результаты этих экспериментов представлены на рис.1. Из рис.1, в частности, следует, что для горизонта Z=1 000 м (Ti =11,4 °C и S=35,9 ‰) при систематической постоянной погрешности по скорости звука ∆Сi=+1 м/с, абсолютная погрешность определения глубины равна ∆Z=0,076 м, то есть относительная погрешность ∆Z/ Z=7,6·10-5. Для того же горизонта Z=1 000 м при наличии систематической постоянной по глубине погрешности по солености ∆Si=1 ‰, абсолютная погрешность определения глубины ∆ Z= –0,83м и относительная ∆ Z/ Z= –8,3·10-4. Полученные значения относительных погрешностей по знаку совпадают, а по величине близки к оценкам по соотношению (16) с коэффициентами из табл. 1. 0,4 0,2 0 0 20 50 75 100 150 200 250 300 400 500 600 800 1000 1200 1500 2000 , м Н -0,2 ьт -0,4 со н -0,6 ш ер го п -0,8 яа нт -1 ю ло -1,2 бс А Систем.погрешность по С=1м/с Систем.погрешность по S=1 промилл. -1,4 Случайн.погрешность по S, равномерный закон распределения -1,6 Случайн.погрешность по С и S, равномерный законо распределения -1,8 Глубина, м Рис.1. Абсолютные погрешности ∆Н определения глубины по измеренным значениям гидростатического давления без погрешности и значениям скорости звука и температуры воды с различными погрешностями (район измерения – Атлантический океан) Рис.1 показывает, что для определения глубины погружения зонда скорости звука с относительно высокой точностью по значениям гидростатического давления Pi, скорости звука Сi и солености Si морской воды вполне приемлемо использование измерений с погрешностью менее 1 м/с значений скорости звука и даже ориентировочных данных по вертикальным распределениям солености в Мировом океане, приводимых в обобщающих монографиях типа [6] или данных о вертикальном распределении солености из банков гидрологических данных. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Микушин И.И., Романов В.Ю., Серавин Г.Н. Определение глубины погружения многоразового зонда измерителя скорости звука в море // Сборник рефератов ДР. ВИМИ. 2002. Вып.4. 2. Васильев С.А., Микушин И.И., Романов В.Ю., Серавин Г.Н. Определение глубины погружения зонда измерителя скорости звука в воде по значениям гидростатиче- 14 Секция методов и средств экологического мониторинга водных районов ского давления, скорости звука и температуры // 5 Международная конференция и выставка по морским интеллектуальным технологиям «Моринтех 2003»: Материалы конференции. – Санкт-Петербург. 2003. – С.316 – 320. 3. Del Grosso V.A. New eguation for tne speed of sound in natural waters (with comparisons to the oth eguations). J.Acoust. Soc. Amer., 1974. V.56. N4. Р.1084 – 1091. 4. Белогольский В.А., Левцов В.И., Саморукова Л.М., Секоян С.С., Стефанов С.Р. ГСССД 202-02. Морская вода. Скорость звука при соленостях 0…40 ‰, температурах 0…40 0С и избыточных давлениях 0…60 МПа. Свидетельство № 202 от 10.12.02 г. Москва. Госстандарт России. 2002. 31 с. 5. Мамаев О.И. T,S – анализ вод Мирового океана. – Л.:Гидрометеоиздат, 1970. – 364с. 6. Степанов В.Н. Мировой океан. – М.: Знание, 1974. – 255 с. СТАЦИОНАРНАЯ АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА И.И. Микушин, Г.Н. Серавин, С.П. Тарасов Для измерения от дна до поверхности вертикального распределения скорости звука (ВРСЗ) во внутренних водоемах и относительно мелководных прибрежных морских районах весьма перспективной является стационарная дистанционная акустическая аппаратура, основанная на акустическом зондировании искусственных отражателей, расположенных на различных горизонтах, приеме рассеянных от них сигналов и решении обратной гидроакустической задачи – восстановления искомого ВРСЗ по параметрам излучаемого и принятых сигналов. Такая аппаратура с искусственными отражателями, установленными по вертикали на тросе, впервые была предложена в СССР [1], изготовлена и испытана в море [2]. Однако в водной среде трос с отражателями и грузом или поплавком на конце не устанавливается строго вертикально. При изменении скорости течения и температуры воды форма и длина троса изменяется, что приводит к неконтролируемому изменению положения по глубине отражателей и в конечном итоге к недопустимым погрешностям восстановления искомого ВРСЗ. Эти недостатки исключены при использовании дистанционного акустического способа измерения ВРСЗ и стационарной аппаратуры для его реализации, предложенных в авторском свидетельстве [3]. Аппаратура (рис. 1) имеет трос 1, закрепленный одним концом на дне. На другом конце троса закреплен поплавок 2, а по его длине установлены искусственные акустические сферические отражатели 3. У основания троса размещен акустический излучатель 4 с передатчиком 5. Три акустических приемника 6 с усилителями 7 установлены на дне в одну линию, один приемник – у излучателя, а два других – на фиксированных расстояниях α1 и α2 по разные стороны от него. Передатчик 5 и усилители 7 электрически связаны с соответствующими измерителями временных интервалов 8, выходы которых подключены к вычислительному блоку 9. Излученный акустический сигнал распространяется от излучателя 4 до i-го отражателя и обратно к акустическим приемникам 6 с временами Т1i, T2i, T3i и углами φ1i, φ2i, φ3i прихода к ним. Индексы 1, 2, 3 соответствуют номерам приемников (1 и 2 – крайние приемники, 3 – приемник у излучателя). В вычислительном устройстве искомое ВРСЗ восстанавливалось по алгоритму, предложенному в работе [4], который справедлив для прямоугольной схемы зондирования, т.е. когда отражатели располагаются в водной среде строго по вертикали: 15