Сравнение режимов работы лидара-нефелометра для
advertisement

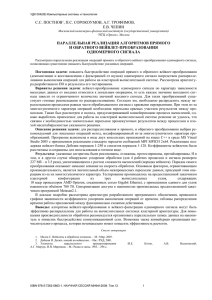
114 Прикладная физика и прикладная механика ТРУДЫ МФТИ. — 2014. — Том 6, № 3 УДК 551.501.793 Г. П. Арумов1,2 , А. В. Бухарин1 , Ю. М. Блих3 1 2 Институт космических исследований РАН Московский физико-технический институт (государственный университет) 3 НИЦ «Курчатовский институт» Сравнение режимов работы лидара-нефелометра для измерения коэффициента обратного рассеяния Проанализирована возможность работы лидара-нефелометра обратного рассеяния с двухпозиционной схемой зондирования. Схема нефелометра с двумя приемными каналами позволяет производить контроль трассовой зависимости геометрического формфактора для полей зрения двух приемных каналов. Предлагается использовать диодные лазеры с управлением интенсивностью излучения уровнем тока запуска. Тогда прибор можно переключать как в режим лидара, так и в режим нефелометра. Появляется перспектива упрощения калибровки этого нефелометра по сравнению с калибровкой обычного импульсного лидара без использования аттенюаторов для ослабления обратного сигнала от рассеивающей поверхности. Это позволит существенно повысить точность измерения коэффициента обратного рассеяния нефелометром. Ключевые слова: двухпозиционная схема, дистанционное зондирование, коэффициент обратного рассеяния, диодный лазер, геометрический форм-фактор, нефелометр, лидар, рассеяние, калибровка, аттенюатор. 1. Введение В настоящее время режим работы лидара в импульсном режиме является общепри- нятым. Импульсный лидар позволяет измерять расстояние до рассеивающих объектов и ширину рассеивающего слоя. На трассах, ограниченных поверхностью топографического объекта, импульсный лидар позволяет измерять пропускание по изменению сигнала, рассеянного поверхностью объекта. Для таких задач циклограмма работы импульсного лидара представляется оптимальной. Другой круг задач связан с измерениями базовых коэффициентов атмосферы. К базовым коэффициентам относятся коэффициент обратного рассеяния (КОР) и коэффициент экстинкции (КЭ) на открытых трассах. Калибровка по КОР сопряжена со значительными техническими трудностями. Суть этой калибровки заключается в измерении трассовой зависимости абсолютного значения обратного сигнала от поверхности объекта с известной угловой диаграммой рассеяния. При этом сигнал от рассеивающей среды и ослабление пучка должны быть предельно малыми. Измерение сигнала обратного рассеяния из атмосферы начинается с достаточно больших расстояний, от нескольких сотен метров до нескольких километров, что требует учета влияния рассеивающей среды. В ближней или мертвой зоне амплитуда сигнала настолько велика, что выходит за диапазон измерений приемником. Кроме того, внутри мертвой зоны формируются угловые размеры пучка и поля зрения приемного канала. При регистрации сигнала обратного рассеяния из некоторой точки трассы работает не вся апертура приемного канала. Это приводит к сложной трассовой зависимости геометрического форм-фактора в ближней зоне лидара. Амплитуда сигнала от калиброванной рассеивающей поверхности на несколько порядков превышает амплитуду сигнала обратного рассеяния из атмосферы. При этом угол между калиброванной поверхностью и оптической осью пучка должен быть постоянным на расстояниях от нескольких сотен метров до нескольких километров. Существующие лидарные системы имеют значительную энергию излучения лазерного импульса. В связи с этим атмосферу зондируют вдоль вертикальных трасс. Измеряемый ТРУДЫ МФТИ. — 2014. — Том 6, № 3 115 Г. П. Арумов и др. сигнал обратного рассеяния регистрируют от слоев до 100 км, для которых обратное рассеяние происходит только от молекулярной компоненты атмосферы. Появляется возможность сопоставить этому сигналу определенный КОР с достаточной степенью вероятности [1]. Наличие такого сигнала в конце зондируемой трассы позволяет использовать метод Клетта для восстановления трассовой зависимости КОР [2]. Перспективным направлением является использование диодных лазеров в лидарах. Характерной особенностью этих лазеров является управление мощностью излучения диодного лазера уровнем тока запуска. Это позволяет изменять максимальную мощность выходного излучения лазера. При этом лазер может работать как в непрерывном, так и в импульсном режимах. На современном уровне развития диодные лазеры позволяют задавать режим работы с мощностью генерации излучения до 1 Вт и более на длине волны 0.8 мкм. Не представляет существенных трудностей реализация режима работы такого лазера в импульсном режиме от 200 нс до нескольких микросекунд. Впервые возможность использования диодных лазеров в лидарном зондировании указана в работе [3], где предложен вариант PRN (Pseudo Random Noise) лидара. Лазерное излучение модулируется псевдослучайным образом. Форма лидарного сигнала из атмосферы для импульсного режима работы восстанавливается из временной зависимости рассеянного назад излучения. Особенностью данного лидара является высокий коэффициент полезного действия (КПД) использования лазерного излучения. На таком лидаре получен обратный сигнал от слоев атмосферы, находящихся на расстояниях от нескольких сотен метров. Однако для PRN-лидара существуют такие же трудности, как для обычного импульсного лидара в задаче измерения базовых рассеивающих параметров атмосферы. Реализация калибровки PRN-лидара для измерения КОР технически затруднительна. Невозможно настроить геометрию лидара на измерения базового параметра в заданном диапазоне. В приведенном ниже материале рассматривается режим работы лидара как нефелометра. Нефелометр определим как средство, оптимально настроенное на измерения КОР для трассы заданной длины, и может быть реализован внутри лидара посредством переключения лазера. Применение такого лидара-нефелометра является актуальным на горизонтальных трассах. Так, например, КОР, измеренный нефелометром, находящимся на конце трассы, использован в методе Клетта для обработки сигнала обратного рассеяния, измеренного импульсным лидаром, находящимся в начале трассы [2]. 2. Циклограмма нефелометра обратного рассеяния Будем предполагать, что лидар имеет коаксиальную схему зондирования. В такой схеме оптические оси приемного и передающего каналов совпадают. Циклограмма работы зондирующего средства в качестве нефелометра представлена на рисунке 1 (далее в тексте — циклограмма 1). В начале создается модуляция импульса лазера, начиная от максимума с линейным убыванием до нуля в течение времени 𝜏. В момент окончания импульса ин- тенсивности зондирующего излучения включается приемник в интервале от такой циклограмме работы производится зондирование трассы в диапазоне 𝐿 = 𝑐 · 𝜏 /2. Для тонкого слоя, расположенного внутри трассы на расстоянии интервале от 𝜏 до 2𝜏 0.5𝐼1 обратный сигнал в представляет собой фрагмент прямоугольного треугольника с гори- зонтальным размером и 𝑧1 , 𝜏 до 2𝜏 . При 0 6 𝑧 6 𝐿, 𝑡2 = 2𝑧1 /𝑐 (см. нижний треугольник с горизонтальной штриховкой) (𝑧2 = 2𝑧1 ), (2𝑡2 ) по вертикали 𝐼1 . На гра𝑧2 = 2𝑧1 соответствует треугольник по вертикали. Если расстояние до тонкого слоя увеличить в 2 раза то в 2 раза увеличится сторона по горизонтали и в 2 раза фике сигналу обратного рассеяния от тонкого слоя с размером стороны 𝑡3 = 2𝑡2 по горизонтали (треугольник с вертикальной штриховкой). Соответственно увеличится площадь треугольника в 4 раза (см. верхний треугольник с вертикальной штриховкой ). С другой стороны, уменьшится рассеянная назад максимальная интенсивность сигнала ввиду квадратичного убывания сигнала с расстоянием. 116 Прикладная физика и прикладная механика ТРУДЫ МФТИ. — 2014. — Том 6, № 3 Рис. 1. Циклограмма 1 для нефелометра обратного рассеяния Если тонкий слой находится на выходной апертуре нефелометра, назад сигнал не проходит в интервал от 𝜏1 до 2𝜏1 𝑧1 = 0, то рассеянный и близок к нулю. В общем случае коэффи- циент уменьшения интенсивности сигнала с увеличением расстояния будет меньше 4 (см. ниже). Энергия сигнала, пропорциональная площади треугольника от слоев внутри диапазона 0 ≤ 𝑧 ≤ 𝐿, будет монотонно увеличиваться с увеличением расстояния до некоторой величины. Рис. 2. Циклограмма 2 для импульсного лидара Циклограмма работы импульсного лидара представлена на рисунке 2 (далее циклограмма 2). Импульс очень малой длительности Δ𝑡 облучает зондируемый объект (см. рис. 2а). Одновременно с импульсом лазера включается приемник в течение времени 𝜏 (см. рис. 2б). Для рассеивающего объекта, представляющего собой плоскую поверхность и распо- ТРУДЫ МФТИ. — 2014. — Том 6, № 3 ложенного на расстоянии 𝑧1 , 117 Г. П. Арумов и др. обратный сигнал изображен на рис. 2с. При этом временная развертка рассеянного назад излучения повторяет форму лазерного импульса и имеет задержку 𝑡1 = 2𝑧1 /𝑐 относительно начала включения приемника. При увеличении расстояния до объекта амплитуда сигнала падает по квадратичному закону (см. штрихованные прямоугольники на рис. 2с). Рассмотрим характерные отличия схем с циклограммами работы на рис. 1, 2. Для циклограммы 1 фотоотсчеты под огибающей сигнала в стробе от 𝜏 до 2𝜏 не дают информации о пространственном распределении неоднородностей вдоль трассы зондирования в отличие от циклограммы 2. Как будет показано ниже, энергия сигнала монотонно возрастает с расстоянием до рассеивающей поверхности. Начиная с некоторой дистанции, сигнал практически не будет изменяться. Появляются новые возможности калибровки нефелометра по мишеням с известными рассеивающими свойствами. Для циклограммы 2 сигнал от рассеивающей поверхности на несколько порядков больше соответствующего сигнала от рассеивающего слоя в атмосфере. При использовании аттенюаторов в таких измерениях появляются дополнительные трудноконтролируемые источники погрешностей. Например, возможно изменение геометрического форм-фактора приемного и передающего каналов за счет излома оптической оси, искажения полей зрения и геометрии зондирующего пучка. Основным преимуществом измерительного средства с циклограммой 1 является возможность работы зондирующего средства без мертвой зоны. После выключения лазерного излучателя сигнал обратного рассеяния будет регистрироваться от слоя, находящегося в непосредственной близости от лидара. Причем уровень интенсивности излучения рассеянного назад этим слоем будет много меньше максимального. Для дальнего слоя уровень интенсивности будет максимален, однако этот слой будет находиться существенно дальше от лидара. Пример 1. Для имеющегося макета лидара максимальная мощность в импульсе состав- ляет 10 Вт при частоте следования импульсов 2.5 кГц. Длительность лазерного импульса 100 нс. Отсюда следует средняя мощность лазерного излучения — 2.5 мВт. КПД использования энергии лазера составляет 2.5 · 10−3 /10 = 2.5 · 10−4 (2.5 · 10−2 %). Этому КПД соответствует работа лидара с циклограммой на рис. 2. Для циклограммы на рис. 1 можно использовать диодные лазеры с мощностью до 1 Вт. Пусть интервал между включениями лазера в 3 раза больше длительности лазерного импульса, что соответствует скважности 1/3. Кроме того, из-за треугольной формы импульса энергия будет определяться средней мощностью, равной половине от максимальной. Следовательно, КПД использования лазерного излучения, в зависимости от условий задачи, может составлять 1/6 = 0.17 (17%). Это значение выше, чем для 2-й циклограммы в сотни раз. Средняя мощность лазера составляет приблизительно 170 мВт, что в 68 раз больше, чем для лазера с циклограммой 2. 3. Геометрия нефелометра обратного рассеяния Ранее [4] рассмотрена модель зондирования с точечным приемником и точечным источ- ником излучения в передающем канале в параксиальном приближении. Геометрическая схема представляет собой одно отверстие с оптической осью, проходящей через плоскость наблюдения. На оптической оси в плоскости наблюдения точечный источник и точечный приемник совмещены. В этой схеме поля зрения и зондирующий пучок формируются одним отверстием. Эту систему мы называем идеальной схемой (ИС) зондирования. Пусть отверстие имеет функцию пропускания (︂ 𝑀 (𝑟) = 𝑀0 exp где 𝑎 — радиус отверстия, точка 𝑟(𝑥; 𝑦) −𝑟 2 4𝑎2 )︂ , лежит в плоскости отверстия. Координаты (1) (𝑥; 𝑦) отсчитываются относительно оси пучка. Выражение (1) позволяет показать угловую зави- Прикладная физика и прикладная механика 118 ТРУДЫ МФТИ. — 2014. — Том 6, № 3 симость поля зрения и зондирующего пучка в явном виде √︀ 𝜙 = 2𝑎 𝐻(𝑧), (︀ )︀2 𝐻(𝑧) = 𝑙𝑑−2 + 𝑙−1 + 𝑧 −1 . Здесь параметр дифракционной длины 𝑙𝑑 = 2𝑘𝑎2 , 𝑙 — расстояние между плоскостью отвер- стия и плоскостью наблюдения. Параметр длины строба 𝑙. Предположим, что 𝐿 = 3𝑙. (2) 𝐿 может существенно превышать Отметим, что для обычной циклограммы 2 параметр теризует мертвую зону. Параметр 𝐿 𝑙 харак- характеризует зондируемую трассу. Этот параметр может быть выбран произвольно. Однако можно утверждать, что этот параметр должен 𝐿 = 3𝑙. быть достаточно велик по сравнению с 𝑙, например, 𝐻(𝑧) мож(𝜙𝑧)−2 . При 𝑧 << 𝑙 угло- В приближении геометрической оптики первым слагаемым в выражении для но пренебречь. Убывание сигнала с расстоянием пропорционально вой размер пучка стремится к бесконечности, при к постоянной величине 2𝑎/𝑙. 𝑧 >> 𝑙 угловой размер пучка стремится 𝑙 Физический смысл параметра диаметра входной апертуры к угловому размеру пучка Мощность рассеянного назад излучения 𝑃 (𝑡; 𝑅) 𝜙, определим как отношение см. (2). для циклограммы 2 от поверхности рассеивающего объекта для точечных приемников определяется выражением (︀ )︀−1 ⃒⃒ 𝑃1 (𝑡; 0) = const 𝑧 2 𝐻(𝑧) ⃒ Здесь 𝑃1 (𝑡; 0) 𝑧=𝑐𝑡/2 . (3) — мощность обратного сигнала в момент времени 𝑡 на оптической оси ИС, 𝑐 — скорость света. С увеличением расстояния до зондируемой поверхности интенсивность сигнала падает по квадратичному закону. Из (3) следует, что рассеянная назад интенсивность убывает с расстоянием 𝑧 как (𝑧+𝑙)−2 , см. рис. 2. Для циклограммы 1 вместо (3) будем иметь выражения для энергии сигнала от поверхности: 𝑊1 (𝑂) = const (𝐻(𝑧))−1 , 𝑊1 𝑃1 (𝑡; 0). Здесь ком (︀ )︀2 𝐻(𝑧) = 𝑙−1 + 𝑧 −1 . — энергия сигнала, измеряемая приемным каналом, или площадь под графиНа рис. 1 энергии сигнала соответствует площадь заштрихованного прямо- угольного треугольника. Пределы интегрирования до 𝑐𝜏 . (4) 𝑃1 (𝑡; 𝑅) по 𝑡 ограничены слоем от 𝑐𝜏 /2 Выражение (4) дает (см. (2)) трассовую зависимость квадрата углового размера 𝜙2 (𝑧). 𝑙 мы получаем монотонное возрастание энергии сигнала от зондируемой трассы. Если 𝑧 << 𝑙, то обратный сигнал от рассеивающе2 го объекта пропорционален (𝑧/𝑙) . Если 𝑧 >> 𝑙, то соответствующий сигнал практически пучка При известном параметре геометрии не изменяется. Для однородной атмосферы энергия сигнала обратного рассеяния складывается от всех слоев в диапазоне 0 ≤ 𝑧 ≤ 𝐿. Из сказанного выше следует необходимость измерения трассовой зависимости поля зрения (пучка). По сути, для циклограмм 1, 2 надо получить трассовую зависимость сигнала до рассеивающей поверхности, нормаль которой ориентирована одинаково по отношению к оптической оси ИС, или сигнал от ориентированной поверхности (СОП). Для калибровки по КОР достаточно определить сигнал от рассеивающей поверхности из ближней зоны. В этой зоне сигнал может быть на несколько порядков меньше, чем для импульсного лидара. При наличии калибровки СОП можно сопоставить сигналу из атмосферы сигнал от рассеивающей поверхности [5]. Тогда возможны ситуации, когда не надо использовать аттенюаторы для совмещения динамического диапазона сигналов от поверхности и из атмосферы. Пример 2. Для имеющегося макета лидара [5] отраженный с 30 метров сигнал от −1 определяется 120 фотоотсчетами. поверхности с коэффициентом отражения 0.3 стр Соответствующая величина от слоя атмосферы шириной 75 м составляет 0.02 фотоотсчета. Следовательно, ослабление сигнала должно составлять порядка 103 . Для нефелометра на расстоянии 10 м сигнал от рассеивающей поверхности может быть в 100 раз меньше, чем для расстояния 100 м. Соответствующий аттенюатор должен давать дополнительное ТРУДЫ МФТИ. — 2014. — Том 6, № 3 119 Г. П. Арумов и др. ослабление зондирующего пучка в 10 раз. При использовании диодного лазера такое ослабление можно задавать уменьшением амплитуды тока запуска. Таким образом, калибровку лидара по КОР можно производить без аттенюаторов. Для измерений КОР и интерпретации данных зондирования требуется определить степень однородности атмосферы вдоль трассы зондирования. Для циклограммы 2 форма сигнала обратного рассеяния при наличии СОП в принципе дает информацию о степени однородности вдоль трассы зондирования. Однако часто сигнал обратного рассеяния регистрируется из дальней зоны 𝑧 >> 𝑙, где измерения СОП технически затруднитель- ны. Для определения степени неоднородности трассы в режиме циклограммы 1 необходим дополнительный приемный канал с другим геометрическим форм-фактором по отношению к основному приемному каналу. Ранее была описана двухпозиционная схема (ДПС) [6], часть которой представляет собой ИС, а дополнительный приемный канал имеет ту же геометрию, что и основной канал (без излучающего источника), но его оптическая ось параллельно смещена на некоторое расстояние 𝑑. Пусть 𝑑 = 2𝑎. Этой геометрии соответ- ствует касание полей зрения на входной апертуре нефелометра. При этом передаточная функция пропускания отверстия должна соответствовать максимальному пропусканию по всей площади отверстия. Тогда на выходе из канала передатчика зондирующий пучок начинает сразу перекрываться с полем зрения дополнительного приемного канала. Каналы оптически изолированы горизонтальной темной перегородкой [7]. Пусть для ДПС произведена калибровка СОП. Такая калибровка позволяет определить отношение энергии сигналов из однородной атмосферы с малым пропусканием. Этому от- 0 внутри слоя 𝐿 из данных ло𝑧𝑒𝑡 0 кальной калибровки. Параметр 𝑧𝑒𝑡 определяется только геометрией ДПС нефелометра и ношению можно сопоставить протяженность видимости не зависит от оптических свойств среды. При наличии неоднородностей, ослабления и искажений пучка параметр 𝑧𝑒𝑡 ется. Если внутри трассы находится поверхность топографического объекта, то изменя- 𝑧𝑒𝑡 дает расстояние до поверхности данного объекта. Вопрос о зависимости этого параметра от рассеивающих параметров атмосферы вдоль трассы зондирования и КЭ требует отдельного рассмотрения. 4. Использование перфорированных экранов для калибровки нефелометра На нефелометре должен быть измерен СОП на расстояниях от 0 до 𝐿. Эти измере- ния связаны с большими техническими трудностями. Эти трудности могут быть решены посредством дополнительного приемного канала или нефелометра с ДПС. Пусть в нефелометре реализованы режимы переключения работы лазера согласно циклограммам 1, 2 и в непрерывном режиме. Для калибровок используются перфорированные экраны [8]. Такой экран представляет собой тонкую непрозрачную пленку с круглыми монодисперсными отверстиями с заданным размером. Эти отверстия расположены на экране случайным образом. В зависимости от диаметра отверстий можно вносить заданные изменения в угловой размер пучка и поле зрения приемного канала. На первой стадии следует произвести локальную калибровку (ЛК) для ДПС нефелометра. Измерения, соответствующие ЛК, заключаются в определении геометрического формфактора для основного и дополнительного приемных каналов. Эти измерения не представляют больших технических трудностей и могут быть реализованы с использованием любых топографических объектов, имеющих однородную плоскую рассеивающую поверхность со значительной площадью (стена дома, щиты, плакаты и т.п.). Во время измерений поверхность объекта может иметь любую ориентацию по отношению к зондирующему пучку. Результатом является зависимость отношения сигналов для дополнительного и основного приемных каналов от расстояния до рассеивающей поверхности. Для малых дистанций лучше использовать непрерывный режим работы лазера, так как могут быть существенными осцилляции мощности излучения. Это может привести к 120 Прикладная физика и прикладная механика ТРУДЫ МФТИ. — 2014. — Том 6, № 3 увеличению погрешности в результатах измерений геометрического форм-фактора. Для дальних расстояний преимущество имеет импульсный режим работы излучателя (циклограмма 2), так как возможен существенный вклад обратного рассеяния из атмосферы в ближней зоне. Затем результаты ЛК используются для калибровки СОП. Пусть зондируемая поверхность объекта находится на некотором расстоянии 𝑧0 𝑧0 . Для достаточно большой дистанции выбираем циклограмму 2 импульсного лидара. Установка экрана с отверстиями перед всеми оптическими каналами приводит к одинаковому увеличению полей зрения и углового размера зондирующего пучка. В результате увеличивается отношение энергии сигналов, измеряемых приемными каналами. Этому отношению соответствует новая дистанция 𝑧1 из ЛК. Ранее было обосновано, что если в отсутствие перфорированного экрана поверхность 𝑧1 , то отношение сигналов будет таким же, как для 𝑧0 дистанция больше 𝑧0 , поскольку угловой размер полей зрения объекта расположить на расстоянии при наличии экрана [6]. Эта и зондирующего пучка увеличиваются. При этом ориентация рассеивающей поверхности по отношению к оптической оси ИС не меняется. Для дистанции 𝑧1 находим рассеянные назад сигналы для обоих приемных каналов. Затем повторяем измерения для следующего перфорированного экрана с другими диаметрами отверстий. Находим сигналы обратного рассеяния для дистанции 𝑧2 из ЛК. Указанные измерения проводим для всех экранов. Получаем калибровку СОП или зависимость сигнала обратного рассеяния от расстояния (3). Коррекция (3) на квадрат расстояния дает трассовую зависимость рассеянной поверхностью объекта интенсивности, которую измеряет нефелометр с циклограммой 1 в однородной атмосфере без ослабления (4). По результатам измерений находим параметр протяженности видимости 5. 𝑧𝑒𝑡 для однородной атмосферы без ослабления. Выводы Оптимальные характеристики лидара и нефелометра принципиально различны. Циклограмма работы импульсного лидара оптимальна для измерений пространственного расположения и ширины рассеивающих слоев вдоль трассы зондирования, но не оптимальна для измерения КОР. При использовании диодных лазеров оптимальный режим калибровки по КОР достигается переключением лидара с циклограммой 2 в режим нефелометра с циклограммой 1. Для указанной циклограммы КПД использования энергии излучения лазера много больше, чем для импульсного лидара. Особенностью предложенной циклограммы является монотонное увеличение сигнала обратного рассеяния с расстоянием. Это открывает новые возможности для калибровки нефелометра с использованием калиброванных рассеивающих поверхностей. Использование диодных лазеров с управлением интенсивностью излучения током запуска позволяет не устанавливать аттенюаторы для ослабления сигнала обратного рассеяния от поверхности объекта. Несмотря на то, что основной задачей нефелометра является калибровка и измерение КОР, существует необходимость установки в нефелометре дополнительного приемного канала (нефелометр с ДПС). Дополнение нефелометра вторым приемным каналом позволяет определять степень неоднородности трассы и производить калибровку нефелометра с ДПС на протяжении всей зондируемой трассы посредством использования перфорированных экранов. Благодарность Авторы выражают благодарность сотруднику Института космических исследований РАН (ИКИ РАН) Макарову Владиславу Сергеевичу за помощь в выполнении работы. ТРУДЫ МФТИ. — 2014. — Том 6, № 3 Г. П. Арумов и др. 121 Литература 1. Veselovskii I., Kolgotin A., Griaznov V., Muller D., Wandinger U., Whiteman D.N. Inversion with regularization for the retrieval of tropospheric aerosol parameters from multiwavelength lidar sounding // Applied optics. — 2002. — V. 41, N 18. — P. 3685–3699. 2. Klett J.D. Stable analytical Inversion Solution for Processing Lidar returns // Appl. Opt. — 1981. — V. 20. — P. 211. 3. Takeuchi N. [et al.]. Diod-laser random-modulation CW lidar // Appl. Opt. — Jan. 1986. — V. 25, N 1. — P. 63–67. 4. Арумов Г.П., Бухарин А.В., Ерохин Н.С. Метод определения микрофизических пара- метров рассеивающих сред двухпозиционными схемами зондирования: препринт / ИКИ РАН. — M., 2003. — Пр-2095. — 19 с. 5. Першин С.М., Бухарин А.В. и др. [ ]. Калибровка аэрозольного лидара с квантовым счет- чиком и регистрация атмосферных неоднородностей // Оптика атмосферы и океана. — 1994. — Т. 7, № 4. — С. 538–547. 6. Bukharin A.V. Method for measurement of beam lateral distortions with two-position sensing schemes // Physics of Vibrations. — 2001. — V. 9, N 4. — P. 246–255. 7. Бухарин А.В. Особенность распространения поляризованного света через оптическую систему с проводящей пластиной // Нелинейный мир. — 2013. — Т. 11, № 8. — С. 577–582. 8. Bukharin A.V. Two-position Scheme Applied for Determination of Microphysical Properties of Random Transmitting Screen // Physics of Vibrations. — 2002. — V. 10, N 3. — P. 177–184. Поступила в редакцию 07.03.2014.