МОРСКОЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ имени
advertisement

ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА
ФЕДЕРАЛЬНОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
МОРСКОЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
имени адмирала Г. И. Невельского
На правах рукописи
Хоменко Дмитрий Борисович
РАЗРАБОТКА СПОСОБА АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ
ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ ДЛЯ ПОВЫШЕНИЯ
БЕЗОПАСНОСТИ ПЛАВАНИЯ СУДОВ
Специальность: 05.22.19 – Эксплуатация водного транспорта, судовождение
Диссертация
на соискание ученой степени кандидата технических наук
Научный руководитель:
кандидат физико-математических наук, доцент
Акмайкин Д. А.
Владивосток – 2015
2
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ................................................................................................................. 4
ГЛАВА 1. Анализ способов определения параметров морского волнения........ 10
1.1. Анализ влияния гидрометеорологических параметров на условия
мореплавания....................................................................................................... 10
1.2. Анализ способов определения интенсивности морского волнения
методом угловых расстояний ............................................................................ 21
1.3. Анализ способов определения интенсивности морского волнения
методом фоторегистрации ................................................................................. 25
1.4. Анализ вариантов построения радиолокационных волномеров............. 29
1.5. Анализ способов определения интенсивности морского
волнения с помощью ИСЗ.................................................................................. 35
1.6. Влияние состояния атмосферы на дальность радиолокационного
наблюдения .......................................................................................................... 39
1.6.1. Ослабление, вносимое дождем............................................................ 39
1.6.2. Ослабление, вносимое туманом .......................................................... 43
1.6.3. Ослабление, вносимое градом ............................................................. 44
1.6.4. Ослабление, вносимое облаками......................................................... 45
1.6.5. Результаты измерений влияния метеорологических условий
на распространение радиоволн судовой РЛС .................................... 46
1.7. Выводы по первой главе.............................................................................. 50
ГЛАВА 2. Отражение радиоволн морской поверхностью. .................................. 52
2.1. Отражающие свойства морской поверхности........................................... 52
2.2. Определение направления распространения морского волнения
на основе статистической структуры поля....................................................... 61
2.3. Анализ интерпретации волнения и сигналов РЛС, отраженных
от моря............................................................................................................ 66
2.4. Анализ структуры данных радиолокационного зондирования............... 70
2.5. Выводы по второй главе.............................................................................. 74
3
ГЛАВА 3. Разработка способа определения параметров морской поверхности
с помощью информации, получаемой от судовой радиолокационной
станции ....................................................................................................................... 76
3.1. Выбор средства обработки радиолокационной информации.................. 76
3.2. Методы цифровой обработки сигнала радиолокационной станции ...... 82
3.3. Синхронизация РЛС с внешними средствами обработки ....................... 87
3.4. Алгоритм обработки результатов измерений ........................................... 92
3.5. Практическая реализация радиолокационного волномера.................... 102
3.6. Выводы по третьей главе .......................................................................... 108
ГЛАВА 4. Апробация способа и средств определения характеристик
морского волнения .................................................................................................. 109
4.1. Условия проведения экспериментальных исследований. ..................... 109
4.2. Обработка результатов измерений........................................................... 112
4.3. Определение средней высоты морских волн .......................................... 114
4.4. Определение генерального направления распространения волн ......... 116
4.5. Определение длины морских волн........................................................... 122
4.6. Практическое применение результатов исследования .......................... 123
4.7. Выводы по четвертой главе ...................................................................... 124
ОСНОВНЫЕ ВЫВОДЫ И РЕЗУЛЬТАТЫ .......................................................... 126
Список литературы ................................................................................................. 129
Приложение А (справочное) Решение о выдаче патента на изобретение ........ 145
Приложение Б (справочное) Справка о погодных условиях
и состоянии морского волнения в районе мыса Купера........... 153
4
ВВЕДЕНИЕ
Актуальность темы. Безопасность мореплавания является важнейшим
фактором при осуществлении морского судоходства. В настоящее время этот
вопрос остается одним из приоритетных практически во всех ведущих морских державах мира.
Волнение, как правило, оказывает решающее влияние на безопасность
морского сообщения для судов в открытом море. Движение в штормовых условиях связано с целым рядом опасных обстоятельств: усилением качки, зарыванием в волну, попаданием на палубу больших масс воды и др. Особое
влияние морское волнение оказывает на такие мореходные качества судна,
как остойчивость, качка и управляемость.
Анализ состояния аварийности судов показывает, что ряд аварий на
морском транспорте связан с неправильной оценкой состояния морского
волнения. Так, 10 января 2005 года теплоход «Константин Паустовский», совершавший рейс с грузом удобрений, навалился на южный входной мол
Маршал дока в порту Силот (Великобритания). Основной причиной кораблекрушения признан неправильный учет волнения, ветра и течения при маневрировании захода судна в Маршал док.
23 октября 2006 года в Японском море потерпел кораблекрушение и затонул теплоход «Синегорье». Вследствие кораблекрушения погибло 5 и пропало без вести 2 человека. Основной причиной кораблекрушения признано
ошибочное управление судном на попутном волнении, приведшее к попаданию судна в зону резонансной качки, периодическому резкому уменьшению
его остойчивости на гребнях попутных волн и получению больших углов
крена, смещению груза на правый борт с люковых крышек трюма № 1 и последующему срыву за борт палубного лесного груза с люковых крышек трюма № 2 [94].
1 июля 2012 года в заливе Анива рыболовная шхуна «Аргонавт» получила крен на левый борт около 5 градусов. При циркуляции судна через ле-
5
вый борт крен увеличился до 25–30 градусов, палубу начала заливать вода, а
затем крен стал критическим. Захваченное волной судно с креном развернуло
лагом к волне. Судно затонуло. По мнению членов комиссии, расследовавших обстоятельства трагедии, капитан проявил излишнюю самоуверенность
и неоправданный риск, не приняв мер по обеспечению безопасности плавания и по предотвращению причинения вреда судну, экипажу и грузу. Кроме
того, он не следил за остойчивостью судна и неправильно оценил параметры
морского волнения [126].
В настоящее время, несмотря на разработанные рекомендации по
управлению движением судна в полях волн, определение параметров морского волнения судоводителями до сих пор осуществляется визуально. В результате, в мировом судоходстве происходят тяжелые аварии, сопровождающиеся человеческими жертвами и экологическими катастрофами, связанные с неправильной оценкой судоводителями параметров морского волнения. В связи с этим актуальной проблемой, связанной с управлением судном,
является определение параметров морского волнения, в большой степени
влияющего на безопасное движение судна.
На борту судна в настоящее время не имеется устройств для определения информации о состоянии морской поверхности. Такая информация либо
определяется судоводителями из личного опыта, либо принимается от береговых служб. Существуют бортовые устройства, но они требуют специализированной подготовки оператора, а получение данных от метеослужб либо
требует длительного времени, когда они уже становятся неактуальными, либо возможен практически мгновенный прием, для этого требуется установка
дополнительного дорогостоящего оборудования и значительные трудозатраты судоводителя на получение и обработку принятой информации.
В настоящее время все суда, осуществляющие морское и речное сообщение, оборудуются судовыми радиолокационными станциями (РЛС), позволяющими своевременно и с высокой точностью определять состояние окружающей судно обстановки. РЛС представляют информацию об окружаю-
6
щих судах, береговой черте и других целях. Но для безопасного маневрирования судоводителю не всегда достаточно только информации об окружающих судно объектах.
Диссертационная работа посвящена оценке состояния морской поверхности на основе обработки информации, поступающей от судовой радиолокационной станции, для снижения количества аварийных ситуаций вследствие движения судна в неблагоприятных сочетаниях курсовых углов и скоростей.
Результаты исследования направлены на повышение уровня безопасности судовождения, снижения морских и экологических катастроф.
Область исследования – методы и средства повышения безопасности
мореплавания, а предмет исследования – определение параметров морского
волнения на основе обработки принятого сигнала судовой РЛС.
Целью работы является разработка способа автоматического определения высоты, длины и направления распространения фронта морского волнения для уменьшения времени принятия судоводителем решения о способах
штормования.
В связи с этим в данной работе были поставлены следующие задачи.
1. Анализ существующих способа определения параметров морского
волнения.
2. Разработка способов определения высоты, направления и периода
морского волнения по данным радиолокационного зондирования.
3. Создание алгоритмов обработки радиолокационной информации по
определению характеристик морского волнения.
4. Разработка программно-аппаратного обеспечения, позволяющего
осуществлять прием и преобразование принятого радиолокационного сигнала для обработки с помощью вычислительных устройств.
Научная новизна работы состоит в следующем.
1. Определена степень затухания радиоволн радиолокационного диапазона при различных метеорологических условиях на основе сопоставления
7
данных о целях, определяемых транспондером автоматической идентификационной системы (АИС) и судовой РЛС.
2. Для оценки балльности морского волнения предложено использовать
в качестве уровня мощности принятого радиолокационного сигнала количество предельных значений аналого-цифрового преобразователя (АЦП) на
единицу площади.
3. Впервые предложено определять направление распространения морского волнения по характеристикам корреляционных функций, рассчитанных
на участках морской поверхности в различных азимутальных направлениях
относительно курса судна.
4. Разработано устройство для определения состояния морской поверхности.
На защиту выносятся следующие положения.
1. Алгоритм оценки высоты морского волнения на основе анализа количества предельных значений аналого-цифрового преобразователя на единицу площади морской поверхности.
2. Алгоритм определения направления распространения фронта морского волнения, основанный на расчете минимального значения длины
большой оси корреляционного эллипса, построенного по уровню ½ коэффициента детерминации двумерной корреляционной функции принятого сигнала судовой РЛС.
3. Алгоритм определения периода морского волнения на основе способа применения спектрального анализа принятых сигналов РЛС, выбранных
поперек фронта морского волнения.
4. Устройство для определения состояния морской поверхности.
Практическая значимость работы: разработанные в диссертации
способ, алгоритмы и программа обработки, применены в комплексной обработке данных судовых РЛС. Возможна адаптация этих процедур к радиолокационным станциям различных производителей и при разработке новых навигационных систем. Удобный интерфейс представления радиолокационной
8
информации о волнении позволяет оперативно принимать решение о смене
режима штормования на основе предупреждения о неблагоприятных сочетаниях скоростей судна и курсовых углов бега волн.
Диссертационная работа связана с научно-исследовательской госбюджетной темой программы «УМНИК» Фонда содействия развитию малых
форм предприятий в научно-технической сфере «Разработка системы предупреждения аварийных ситуаций при маневрировании судна с учетом гидрометеорологической обстановки в зоне видимости судовой радиолокационной
станции», выполняемой на кафедре технические средства судовождения
Морского государственного университета им. адм. Г. И. Невельского.
Тема связана с федеральными целевыми программами: «Модернизация
транспортной системы России» в рамках задачи «Комплексная информатизация транспорта на основе использования современных телекоммуникационных и навигационных систем»; планами НИР вуза в рамках темы «Повышение эффективности технических средств навигации и разработка методов их
комплексного использования».
Апробация работы. Основные результаты, вошедшие в диссертационную работу, докладывались и обсуждались на следующих конференциях:
молодежный конкурс ИТ-проектов «ДАЛЬИНФОКОМ» (Владивосток, Мор.
гос. ун-т, 2009); итоговая конференция Фонда содействия развитию малых
форм предприятий в научно-технической сфере, программа «УМНИК» (Владивосток, Мор. гос. ун-т, 2009); международный транспортный форум
«Транспорт России: становление, развитие, перспективы», выставка научнотехнического творчества (Москва, МИИТ, 2009); V международный форум
«Транспорт России» (Москва, Министерство транспорта РФ, 2011); конкурс
на лучшую научную работу среди аспирантов и молодых ученых по техническому направлению (Владивосток, Мор. гос. ун-т, 2012); конференция Фонда
содействия развитию малых форм предприятий в научно-технической сфере,
программа «УМНИК» (Владивосток, ДВФУ, 2012); 57-я, 58-я, 59-я, 60-я и 61-
9
я научно-техническая конференция «Молодежь – наука – инновации» (Владивосток, Мор. гос. ун-т, 2009, 2010, 2011, 2012 и 2013 гг.).
Публикации. Результаты, полученные в диссертации, опубликованы в
19 печатных работах, в том числе 3 работы в изданиях, рекомендованных
ВАК, и одна монография. Получено решение Роспатента о выдаче патента на
изобретение от 5 сентября 2013 г.: Хоменко Д. Б., Акмайкин Д. А. «Устройство
для
определения
состояния
морской
поверхности»,
заявка
№ 2012125680/28(039446).
Личный вклад. Соискатель участвовал в подготовке материалов и написании статей по тематике диссертации, разработке и создании экспериментальной установки по обработке сигнала, получаемого с выхода приемника
судовой радиолокационной станции. Проводил экспериментальные исследования и разрабатывал специализированные программные продукты для обработки и анализа данных радиолокационного зондирования.
10
Глава 1. Анализ способов определения интенсивности
морского волнения
1.1. Анализ влияния гидрометеорологических параметров
на условия мореплавания
При плавании судна в условиях шторма на попутном волнении или
волнении с кормовых курсовых углов характеристики его основных мореходных качеств, таких как остойчивость, качка и управляемость, существенно изменяются [118, 103].
Возникновению аварийной ситуации обычно предшествует одно из
следующих трех явлений или их комбинация:
– значительное изменение или потеря поперечной остойчивости при
прохождении вершины волны вблизи миделя судна. Наиболее опасным в
этом отношении является движение судна на волнах, длина и скорость которых близки соответственно к длине и скорости судна. При этом время пребывания судна с пониженной ниже опасного уровня остойчивостью за кажущийся период волны может оказаться большим, чем время, необходимое ему
на наклонение из вертикального положения на опасный угол крена или на
опрокидывание;
– основной или параметрический резонансы бортовой качки, когда соответственно τ = То или τ = То/2, где τ – кажущийся период набегания волн,
То – период качки судна;
– захват волной, потеря управляемости и самопроизвольный неуправляемый разворот судна лагом к волне – брочинг. Наиболее опасным является
захват на переднем склоне волн, имеющих скорость волны больше скорости
судна и длину волны λ = 0,84÷1,3 относительно длины судна. Брочингу в основном подвержены малые суда, имеющие длину менее 60 м.
Для облегчения задачи управления судном в шторм советскими учеными были предложены специальные диаграммы для выбора курса и скоро-
11
сти
в
штормовых
условиях.
Такие
диаграммы
разработаны
В. Г. Власовым, С. Н. Благовещенским, Л. М. Ногидом, Ю. В. Ремезом [11,
29, 40, 112].
Штормовые диаграммы В. Б. Липиса и Д. В. Кондрикова, универсальная диаграмма Ю. В. Ремеза, а также другая информация, содержащаяся в
нормативных документах, может существенным образом помочь капитану
выбрать оптимальное решение. Также диаграмма Ю. В. Ремеза позволяет определить неблагоприятные сочетания скорости и курсовых углов бега волн
так называемых резонансных зон, что дает судоводителю возможность принимать решения о выборе метода штормования [3, 66, 113].
Однако практическое применение штормовых диаграмм Ю. В. Ремеза
на судне не осуществляется из-за сложности расчетов, а также из-за того, что
высота и направление волн чаще всего определяется судоводителем визуально. При движении в штормовую погоду капитаны стараются не идти лагом к
волне, а двигаться волне навстречу, т. к. при этом качка минимальна. При
осуществлении маневра стараются сократить время воздействия волн на судно, когда оно в опасном положении [8, 26, 128].
Министерством транспорта Российской Федерации в 1993 году введен
в действие руководящий документ (РД) РД 31.00.57.2-91 «Выбор безопасных
скоростей и курсовых углов при штормовом плавании судна на попутном
волнении» [32].
РД 31.00.57.2-91 устанавливает рекомендации по остойчивости и выбору безопасных режимов штормового плавания судна на попутном волнении,
методику расчета необходимых для этого диаграмм и инструкцию по их использованию. РД распространяется на строящиеся и находящиеся в эксплуатации суда длиной 160 м и менее, включая суда смешанного (река – море)
плавания. Для судов большей длины требования РД могут выполняться по
усмотрению судовладельца.
Рекомендации РД 31.00.57.2-91 предназначены для оценки остойчивости и безопасности плавания судна в штормовых условиях на попутном вол-
12
нении и волнении с кормовых углов φ = 180º ± β, где 0º ≤ β ≤ 45º. Они позволяют капитану:
1) при загрузке судна перед выходом в рейс:
– оценить степень опасности штормового плавания на расчетном попутном волнении при заданном варианте загрузки;
– получить рекомендации по рациональной посадке и остойчивости,
при которых неблагоприятное влияние попутного волнения будет минимальным и в процессе рейса не потребуется существенно снижать скорость или
изменять выгодный курс судна;
2) при фактической загрузке судна в рейсе:
– оценить степень опасности штормового плавания при фактических
параметрах попутного волнения, глубине моря и курсовом угле к волне
(КУВ);
– получить рекомендации по требуемому изменению посадки и остойчивости с целью уменьшения неблагоприятного влияния попутного волнения;
– получить рекомендации по выбору безопасных режимов штормового
плавания на попутном волнении с целью предотвращения возникновения
аварийной ситуации или опрокидывания судна.
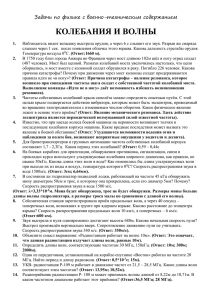
Для случаев нагрузки, при которых возможно попадание судна в условия шторма, положения РД устанавливают методику расчета диаграмм
штормового плавания на попутном волнении (рисунок 1.1).
На рисунке 1.1 представлены:
h3% – фактическая высота волны 3%-й обеспеченности;
h3 – фактическая средняя высота волн зыби;
λ – фактическая средняя длина этих волн;
L – длина судна между перпендикулярами;
h3% расч – указанная в информации об остойчивости высота волны 3%-й обеспеченности, принятая в качестве расчетной для данного судна при оценке остойчивости на попутном волнении [68, 123].
13
Рисунок 1.1 – Диаграмма расчета штормового плавания на попутном
волнении. Области отношений h3%/ h3% расч и λ/L, при которых плавание судов
на попутном волнении считается неблагоприятным или опасным
Внутреннему заштрихованному многоугольнику соответствует область
наиболее неблагоприятных, а также опасных для судна волн (λ/L=0,7÷1,3). В
диаграмме цифрами 1, 2, и 3 помечены параметры трех таких волн: высотой
h3% (1, 2, 3) = 1,0; 0,75; и 0,5 h3% расч или h3 (1, 2, 3) = h3% (1, 2, 3)/kh (kh= 1,336 –
коэффициент перехода от h3 к эквивалентной ей по периоду высоте h3%), при
которых построены диаграммы.
При необходимости судну следовать в шторм попутным курсом предварительно следует определить параметры фактического волнения h3% (или
h3) и λ и соответствующую им точку А нанести на диаграмму. Если точка А
располагается за пределами внешнего многоугольника, плавание на данном
попутном волнении считается благоприятным и проверка по диаграммам не
требуется, если внутри – неблагоприятным и следует оценить его безопасность по диаграмме. В случае, если точка А попадает внутрь заштрихованно-
14
го многоугольника, плавание при данных параметрах фактического попутного волнения может быть опасным для судна. Степень опасности возрастает
по мере приближения значения λ/L к 1,0 и увеличении h3% (или h3). В этом
случае требуется тщательная проверка по диаграммам, выбор безопасных
скоростей и КУВ, а если их практическая реализация невозможна – отказ от
плавания попутными курсами к волне [32].
Морским комитетом по безопасности Международной морской организации (ИМО) 11 января 2007 года одобрены исправленные рекомендации капитанам по избеганию аварийных ситуаций при плавании в штормовых условиях на попутном волнении.
Для выбора надлежащего курса и скорости судна с целью избежать резонансных
зон
качки
используется
диаграмма,
представленная
на рисунке 1.2.
Рисунок 1.2 – Диаграмма штормования ИМО
15
В основу построения диаграммы положена зависимость длины волны
(λ) от кажущегося ее периода (ТW):
TW = 0,8 ⋅ λ .
λ = 1,56 ⋅ T 2 ,
W
(1.1)
Период вынужденных колебаний судна (ТE) рассчитывается по формуле
TE =
3TW2
3TW + V cos α
,
(1.2)
где V – скорость судна;
α – курсовой угол волн.
Суда, снабженные компьютерной системой для расчета условий остойчивости и динамических внешних воздействий с учетом индивидуальных
особенностей судна, должны иметь оригинальное программное обеспечение,
одобренное Администрацией. Полученные при помощи диаграммы ИМО
расчеты могут использоваться для принятия окончательных решений при
плавании судна в штормовых условиях [138].
Российскими учеными под руководством М. А. Кутейникова была разработана методика, позволяющая облегчить выбор безопасных режимов
движения судна на волнении, учитывая индивидуальные параметры судна.
Принципы обеспечения и нормирования прочности судна во время
эксплуатации путем контроля режимов его движения, позволяют сформировать формальный алгоритм генерации эксплуатационных ограничений для
заданного судна.
Исходными данными для процедуры формирования эксплуатационных
ограничений по условиям прочности в предложенной методике являются:
– вся информация о конструкции корпуса судна, представляемая в виде
таких документов, как теоретический чертеж корпуса, чертежи общего расположения, конструктивные поперечные сечения, продольные разрезы, растяжка наружной обшивки;
– характеристики материала корпуса для каждого конструктивного
района. Поскольку все расчеты ведутся в упругой области, то достаточно та-
16
ких характеристик как модуль Юнга, коэффициент Пуассона, предел текучести материала;
– информация о текущем износе конструктивных элементов в виде
таблиц результатов измерения толщин, растяжки наружной обшивки с текущими толщинами листов.
Алгоритм построения эксплуатационных ограничений базируется на
последовательном переборе значений курсовых углов волнения ϕ и скоростей v. Диапазон изменений ϕ от 0 до 180º. Диапазон изменений v от 0 до vmax,
где vmax – максимальная скорость судна на тихой воде при 100 % мощности
главной энергетической установки.
Анализ происходит в следующей последовательности. Для каждого v
и ϕ получаются статистические значения линейных и угловых ускорений ai,
ψi по каждой из координатных осей для текущих параметров волнения. Затем
для каждого v и ϕ рассчитывается давление при слеминге с учетом статистических параметров ускорений по выбранной физической модели слеминга
для каждого конструктивного района. Полученные максимальные давления
слеминга ps,max сравниваются с давлением несущей способности pbr пластин
наружной обшивки корпуса судна. Если максимальные напряжения в пластине меньше допускаемых, то такой режим считается безопасным по условиям слеминга.
На основании полученных результатов проводится построение диаграммы безопасных режимов движения по условиям прочности при слеминге, прочности фундаментов, общей прочности судна.
На основании уровня допустимых размахов прочностных напряжений
строится диаграмма безопасных режимов движения судна (рисунок 1.3, 1.4)
при заданных параметрах загрузки в координатах высота «волны – курсовой
угол». Область 1 ограничивает допустимую комбинацию высоты волны и
курсового угла по условиям усталостной прочности. Область 2 представляет
собой опасное сочетание параметров движения. Горизонтальный участок
17
диаграммы определяет зону, где возможно безопасное плавание с любым
курсовым углом при соответствующей или меньшей высоте волны [62].
а)
б)
Рисунок 1.3 – Диаграмма безопасных режимов движения по условиям
усталостной прочности: а) декартовы координаты высоты волны и курсового
угла; б) полярные координаты высоты волны и курсового угла
Рисунок 1.4 – Объединенная диаграмма безопасных режимов движения
по условиям мореходности и прочности: 1) опасная зона; 2) безопасная зона
18
Методика, предложенная М. А. Кутейниковым, содержит рекомендации судоводителю по выбору такого сочетания курсового угла и скорости
движения в наблюдаемых условиях моря, которые безопасны по условиям
мореходности и прочности, но она требует соответствующего навыка работы
оператора и для объективного анализа – ввода динамических параметров
волнения вручную.
Автором диссертационной работы предлагается автоматизировать процесс получения характеристик морского волнения с помощью разработанного им способа.
Автоматическая передача данных о полях волн в объединенную диаграмму безопасных режимов движения по условиям мореходности и прочности предоставит судоводителю максимально достоверную информацию для
выбора оптимального способа штормования, что, несомненно, снизит влияние человеческого фактора, повысит безопасность мореплавания [119].
Наблюдения за поведением судов в период совершения маневра показывают отличие при проигрывании того же маневра при различной загрузке
и состоянии окружающей обстановки. Подтверждением этому может служить ряд навигационных аварий танкеров с необъяснимым на сегодняшний
день поведением в период, предшествующий аварии (посадка на мель танкера «Кривбасс», столкновение танкера «Хулио Антонио Мелья» и ряд других) [109].
Для исследования этого явления проведена работа по построению математической модели предполагаемой траектории маневра судна. В качестве
эксперимента в работе использовалось проигрывание маневра «Зигзаг Кемпфа10/10» [91] танкером «Port Said» при полной загрузке судна грузом различной плотности. Влияние различных факторов при осуществлении маневра
приводило к тому, что траектория движения судна при различной плотности
жидкого груза, объема свободной поверхности и влиянии окружающей среды
было различным.
19
В качестве первоначального приближения при повороте на левый борт
был выбран полином второй степени вида f (x) = p1x2 + p2 x . Для поиска коэффициентов полинома использовался метод наименьших квадратов. В результате
были получены коэффициенты, приведенные в таблице 1.1.
Таблица 1.1 – Значение коэффициентов полинома траектории движения танкера при испытании на маневр «Зигзаг Кемпфа»
Плотность,
кг/м3
К-т полинома
ρ = 0,8086
ρ = 0,8246
ρ = 0,8459
p1
–1,234*104
–1,403*104
–1,592*104
p2
0,2964
0,3176
0,3414
Из таблицы 1.1 видно, что функция, описывающая движение груженого
танкера, зависит от плотности груза. Если рассматривать особенности движения судна применительно к системам автоматической радиопрокладки
(САРП), системам электронной прокладки (СЭП) и другим подобным, можно
сделать следующее предположение: во всех подобных системах для проигрывания маневров расхождения вносятся коэффициенты, полученные на
заводcких испытаниях при полной загрузке и минимальном влиянии окружающей среды. Также такие системы не учитывают другие дополнительные
факторы, влияющие на движение судна, такие, например, как степень загрузки, плотность груза, сила и направление морского волнения, сила ветра, течения и т. п.
Используя приведенные результаты, описывающие движение судна
при различных условиях, можно создать систему, позволяющую точнее рассчитывать маневр на существующем в настоящее время оборудовании с помощью дополнительных данных для расчетов. В такой системе изначально
будут использоваться параметры движения судна, полученные при заводских
испытаниях. В дальнейшем коэффициенты, описывающие траекторию дви-
20
жения судна, корректируются автоматически каждый раз при изменении параметров как судна (характера, массы груза и особенности загрузки), так и
окружающей среды [5, 116]. Зная точно траекторию маневрирования судна,
проще избежать попадания судна в опасную зону.
В настоящее время определение морского волнения вокруг судна с помощью компьютерных технологии позволяют ускорить получение параметров фактического волнения и одновременно повысить информативность результатов оценки риска плавания на волнении [27].
Исследовательская задача – обеспечить возможность непосредственного измерения геометрических параметров волн дистанционно на ходу судна –
решена несколькими методами [59, 67, 72, 73, 81-83, 95-102] и к настоящему
времени может быть проиллюстрирована схемой на рисунке 1.5.
Рисунок 1.5 – Методы определения параметров взволнованной
поверхности
21
Из рисунка видно, что существующие в настоящее время методы определения параметров морской поверхности используют различные средства и
способы, но в основе своей либо требуют много ручной обработки, либо
сложно реализуемы, т. к. требуют наличия большого количества аппаратных
средств. Для повседневного использования на судах необходима разработка
системы определения параметров морских волн, более простой для использования на судне.
На основании вышеизложенного можно сделать следующие выводы.
1. Для повышения безопасности мореплавания в настоящее время интенсивно развиваются различные методы определения гидрометеорологических параметров вокруг судна.
2. Требуются исследования по разработке новых способов определения
гидрометеорологических параметров вокруг судна, не требующих установки
дополнительного дорогостоящего оборудования на судне.
1.2. Анализ способов определения интенсивности морского волнения
методом угловых расстояний
Инструментальное измерение параметров волнения с движущегося
судна в настоящее время ограничено только измерением кажущегося периода
волн, обычно реализуемого в виде среднего значения из нескольких последовательных волновых колебаний. Имеются методы пересчёта выполненных
измерений в истинные периоды волн, от которых можно перейти к вычислению длин волн, а на основе статистических связей – и к высотам волн. При
этом на каждом шаге вычислений теряется точность, особенно при расчёте
длины и высоты волн.
В 1993 году В. И. Сичкарёв предложил способ измерения длины волны
на ходу судна по измерению видимого угла между двумя соседними вершинами (рисунок 1.6).
22
Рисунок 1.6 – Измерение длины волны по её видимому угловому размеру
Для оценки расстояния до линии измерения использован угол её снижения от видимого горизонта. Способ реализован в виде волномера с двумя
подвижными линейками, в котором измерение угловых величин заменено
измерением линейных величин на расстоянии вытянутой руки (рисунок 1.7).
Рисунок 1.7 – Устройство двухлинеечного волномера:
1) горизонтальная линейка с делениями; 2) вертикальная линейка
с делениями; 3) крестовина; 4) пластина; 5) измерительные метки
23
Отношение линейной меры угла снижения измерительной линии к линейной мере угла между вершинами волн не зависит от длины вытянутой руки и может использоваться для определения длины волны по формуле [95]
λ=e
lг
lв .
(1.3)
где: λ – измеряемая длина волны;
e – высота глаза наблюдателя над уровнем моря;
lг – отсчёт горизонтальной линейки между направлениями на вершины
соседних волн;
lв – отсчёт вертикальной линейки между направлениями на видимый горизонт и измерительную линию по вершинам волн.
В окончательном виде прибор назван ортогонально-линеечным волномером (ОЛВ). Двухлинеечный ОЛВ предназначен для измерения только длины волны λ (или горизонтального размера любого объекта) в море при наличии видимого горизонта. Дальнейшие усовершенствования прибора позволили приспособить его для измерения не только длин волн, но и высот или высоты и длины волны сразу.
Трёхлинеечный ОЛВ предназначен для раздельного измерения длины и
высоты волн (или горизонтального и вертикального размера объекта). Также
может использоваться для измерения длины и высоты одной и той же волны,
однако требует достаточного опыта и сноровки. Трёхлинеечный ОЛВ (рисунок 1.8) состоит из основной горизонтальной линейки (ОГЛ) 1, вертикальной
линейки (ВЛ) 2, установленных в крестовине 3 взаимно перпендикулярно, и
дополнительной горизонтальной линейки (ДГЛ) 4, установленной в крестовине 5. Крестовины предоставляют возможность продольного перемещения
каждой линейки. ОГЛ 1 и ВЛ 2 содержат шкалы деления (например, миллиметровые) вдоль каждой кромки. Начало шкал деления совмещено с левым и
верхним торцом линеек соответственно.
24
Рисунок 1.8 – Устройство трёхлинеечного волномера:
1) основная горизонтальная линейка; 2) вертикальная линейка;
3, 5) крестовина; 4) дополнительная горизонтальная линейка
Высота и длина волны вычисляется по формулам:
h=e
l
c
; λ =e .
b
a
(1.4)
Пересчёт средних параметров hср, λср, в параметры волнения нужной
обеспеченности hx%, λx%, производится с использованием функций распределения этих параметров [90]:
⎛h
F ⎜ x%
⎜h
⎝ ср
⎡
⎛
⎞
⎟ = exp ⎢− 0.785⎜ hx %
⎜h
⎟
⎢
⎝ ср
⎠
⎣
⎞
⎟
⎟
⎠
⎛λ
F ⎜ x%
⎜λ
⎝ ср
⎡
⎛
⎞
⎟ = exp ⎢− 0.757⎜ λ x %
⎜λ
⎟
⎢
⎝ ср
⎠
⎣
⎞
⎟
⎟
⎠
2
⎤
⎥,
⎥
⎦
(1.5)
⎤
⎥.
⎥
⎦
(1.6)
2
Устройства и принцип использования двух- и трёхлинеечного ОЛВ
представлены в [24, 95, 96, 100, 101].
25
В результате проведенного анализа можно сделать выводы.
1. Для практического использования на морском судне метод годится
только при определенных погодных условиях, позволяющих произвести замер первичных параметров.
2. Определив средние параметры волнения любым из методов на основе функций распределения, можно пересчитать параметры волнения к волнению нужной обеспеченности для использования в практических целях.
1.3. Анализ способов определения интенсивности морского волнения
методом фоторегистрации
В 2009 году В. К. Лубковский предложил способ фотографирования
волнового поля через рамку, предполагая в дальнейшем получить элементы
волнения по методу ОЛВ, но выполняя необходимые измерения на фотоснимке. Эту работу завершил К. И. Зинченко, используя для обработки фотоснимки, соответствующие требованиям фоторегистрации волнения, и применяя к их обработке графический редактор Adobe Photoshop.
Основные требования к фоторегистрации волнения сводятся к выбору
крутой рельефной волны; к расположению волны достаточно близко к судну,
но вне зоны воздействия корабельных волн; к чёткости видимого горизонта;
к выбору момента съёмки, когда оптическая ось объектива лежит в вертикальной плоскости, параллельной фронту волны и проходящей через подошву волны. Для отбора снимков использованы видеозаписи волнения. С помощью графического редактора на экран выводятся горизонтальные и вертикальные линейки и разворачивается изображение, что по соответствующим
шкалам позволяет снять необходимые размеры для вычисления высот и длин
волн по формулам (1.4) [72].
Данный учет и измерение могут быть выполнены с помощью фотосъемки экрана РЛС. Съемку необходимо дополнить визуальными наблюдениями экрана. Перед съемкой необходимо зафиксировать параметры погод-
26
ных условий, сопровождающих судно в ближайшие 6 часов и на момент
съемки. Визуальные наблюдения рекомендуется производить не одним наблюдателем.
Фиксация изображения РЛС может производиться телекамерой или
фотоаппаратом. Однако не все РЛС при определенных погодных условиях
способны «удерживать» отстроенное изображение. Поэтому целесообразнее
использовать фотоаппарат.
Для получения наиболее полной картины волнового поля методом фоторегистрации одним из условий получения данных является установка фотоаппарата напротив экрана РЛС так, чтобы оптическая ось объектива совпала с осью луча развертки экрана. После подбора качественных снимков они
распечатываются, и на гребнях волн, либо от середины до середины, либо
между их начальными точками, снимаются расстояния. После того как все
дистанции на экране будут измерены (в мм), длину волны можно вычислить
по формуле [73]
λ=
где
a(1852 R )
,м
d
(1.7)
а – измеренная на снимке дистанция между гребнями, мм;
R – шкала РЛС, морские мили;
d – измеренный на снимке радиус экрана РЛС, мм.
В. И. Сичкарёву в работе [99] удалось связать различную ширину за-
светки волны на экране РЛС с высотой волны и получить формулу
h=
2hан ⋅ (1 − x / λ )
,
(D / λ − 1) ⋅ (1 − cos(2πx / λ )) + (1 − x / λ )
(1.8)
где h — высота волны;
x – ширина полосы засветки;
hан – высота установки антенны РЛС над уровнем моря;
D – расстояние от антенны до рассматриваемой волны;
λ – длина волны как расстояние между соседними гребнями.
Этот метод опробован ручной обработкой снимков экрана РЛС. Выполненная работа позволила выявить и устранить некоторые технологиче-
27
ские препятствия, что в итоге позволило сделать вывод о приемлемости метода измерения ширины засветки волны на экране РЛС для оценки высот
волн в исследовательских целях (из-за его трудоёмкости ).
Однако К. И. Зинченко удалось найти методы компьютерной обработки фотоснимка экрана РЛС, позволяющие существенно снизить трудоёмкость работы и при этом получить дополнительную информацию о волнении,
труднодостижимую при ручной обработке снимков [49].
Для обработки снимков использована программа анализа изображений
Altami Studio. Программа выполняет автоматическое распознавание объекта
(в данном случае – распознавание засветки волн на экране РЛС), его оконтуривание, вычисление некоторых параметров оконтуренных объектов (рисунок 1.9), а также в полуавтоматическом режиме выполнять некоторые построения и делать по ним замеры (рисунок 1.10).
Рисунок 1.9 – Фрагмент снимка экрана РЛС с оконтуренной засветкой волн и
с помехами, внесёнными захваченным фрагментом неподвижного кольца
дальности
28
Рисунок 1.10 – Дополнительные построения на оконтуренных объектах в виде стрелок белого и чёрного цвета, соответствующих длине волны и ширине
засветки от волн
Кроме того, предусмотрена возможность автоматического выполнения
статистической обработки результатов, в том числе в диалоге с оператором.
Метод съемки экрана РЛС выбран как исследовательский ввиду пригодности для получения квазиодномоментной картины волнового поля с получением до нескольких сотен длин волн; определена возможность выявления наиболее вероятных параметров ветровых волн и волн зыби. Недостатком метода явились большие затраты времени на обработку фотоснимков,
что определило его как исследовательский.
Определение состояния морской поверхности методом фоторегистрации подробно изложено в работах [24, 49, 72, 98, 99].
Из существующих систем мониторинга параметров морского волнения
по данным РЛС можно назвать Wavex фирмы Mipos (Норвегия) и систему
WaMoS II фирмы OceanWaveS (Германия) предоставляющие судоводителю
такие параметры как: h3% –высота волны 3%-й обеспеченности; среднего периода волнения; скорости и направления бега преобладающих волн; длины
преобладающих волн [27].
29
Выводы.
1. Согласно методике В. И. Сичкарева различная ширина засветки на
экране РЛС связана с высотой морского волнения, что далее в работе будет
использовано при автоматическом определении высоты морского волнения.
2. Анализ изображений для определения характеристик морского волнения с помощью программы Altami Studio в автоматическом режиме не решен, что требует разработки способов автоматического определения состояния морской поверхности.
1.4. Анализ практической реализации радиолокационных волномеров
Условия высокой разрешающей способности для серийных РЛС выполняются только относительно зыби и крупных (λ ≥ 100 м) ветровых волн.
В то же время наиболее важные для большинства практических задач характеристики волнения, такие как средняя высота, генеральное направление распространения волн и др., могут быть получены и при низкой разрешающей
способности РЛС. В связи с этим важным является построение радиолокационных волномеров, позволяющих получать информацию при любой разрешающей способности, чем достигается расширение диапазона исследуемых
волн.
Примеры реализации радиолокационных волномеров предложены
в [81–83].
Устройство [81] содержит поворотное устройство 1 антенны (рисунок
1.11, 1.12), антенну 2, приемопередатчик 3, синхронизатор 4, датчик углового
положения 5 антенны, электронный ключ 6, блок 7 формирования стробирующих импульсов, интегратор 8, первую линию 9 задержки, блок 10 выделения заднего фронта, блок 11 азимутальной селекции, делитель 12 частоты,
многоканальный накопитель 13, вторую линию 14 задержки, анализатор 15,
регистратор 16. Блок 11 азимутальной селекции содержит N каналов, содержащих источники 17 постоянного напряжения, компараторы 18, генераторы
30
19 импульсов, элементы 20 И, программируемые счетчики 21 и электронные
ключи 22, элемент 23 ИЛИ на N входов и электронный ключ 24 блока азимутальной селекции.
Рисунок 1.11 – Устройство для измерения характеристик морского волнения
Устройство работает следующим образом. Видеосигнал с выхода
приемопередатчика 3 проходит через электронный ключ 6 на интегратор 8
только при наличии на управляющем входе электронного ключа 6 разрешающего сигнала, поступающего в виде прямоугольного импульса с выхода
блока 7 формирования стробирующих импульсов, который синхронизируется импульсами, поступающими от синхронизатора 4. Видеосигнал на выходе
приемопередатчика 3 представляет собой последовательность, состоящую из
прямоугольного импульса, обусловленного просачиванием сигнала в приемный тракт РЛС при излучении зондирующего импульса, и сигнала сложной
формы, обусловленного отражением от морской поверхности. Время tзад задержки импульса на выходе блока 7 формирования стробирующих импульсов относительно зондирующих импульсов должно быть τ < tзад ≤ τ + tм, где
31
τ – длительность зондирующего импульса; tм – время, соответствующее
«мертвой зоне» после окончания зондирующего импульса. Блок 10 выделения заднего фронта вырабатывает прямоугольные импульсы длительностью
τ10, передний фронт которого совпадает по времени с задним фронтом стробирующего импульса на выходе блока 7. Этот импульс, задержанный на время t9 в первой линии 9 задержки, устанавливает в исходное (нулевое) состояние интегратор 8. Время задержки должно быть τ10 ≤ t9 ≤ Т–(τс), где Тп – период повторения зондирующих импульсов, τс – длительность стробирующих
импульсов. Стробирующий импульс должен перекрывать всю область отражений от морской поверхности, следовательно, его длительность должна определяться из условия tзад + τс ≥ 2Dmax/c, где Dmax – максимальная дистанция
от РЛС, с которой наблюдаются отражения от морской поверхности; с – скорость света. Дистанция Dmax зависит от типа РЛС и высоты Н подъема антенны над уровнем моря. Так, например, для судовых навигационных РЛС
Dmax ≈ 4 мили при Н = 15-16 м и Dmax ≈ 14 миль при Н =30м [76].
После интегрирования видеосигнала, обусловленного отражениями от
морской поверхности, на выходе интегратора 8 возникает напряжение, соответствующее энергии Wij радиолокационных отражений от морской поверхности при j-м зондирования в i-м азимутальном направлении, что справедливо для РЛС как с низкой, так и с высокой разрешающей способностью. За
время t9 осуществляется передача сигнала от интегратора 8 через блок 11
азимутальной селекции в соответствующий азимутальный канал многоканального накопителя 13. Сигнал с выхода датчика 5 углового положения антенны поступает на один из входов компараторов 18 всех каналов блока 11
азимутальной селекции (рисунок 1.12). На второй вход каждого из компараторов 18 подается от источников 17 постоянного напряжения сигнал, соответствующий определенному азимутальному направлению, при этом напряжение Ui на выходе источника 17 i постоянного напряжения должно соответствовать азимутальному направлению αi = (i–1)2π/N. Количество каналов в
блоке 11 азимутальной селекции определяется из условия обеспечения тре-
32
буемой точности, учитывая, что погрешность ∆α измерения генерального направления распространения волн определяется формулой ∆α = π/N. Компараторы 18 вырабатывают сигналы только в моменты совпадения напряжения на
двух входах.
Рисунок 1.12 – Структурная схема блока азимутальной селекции
33
Эти сигналы запускают генераторы 19 импульсов, вырабатывающие
прямоугольные импульсы с одинаковой длительностью 2Tп< τ19 > 2π/ω
(ω – угловая скорость вращения антенны), которые, поступая на программируемые счетчики 21 предыдущих каналов, передним фронтом устанавливают
их в исходное (нулевое) положение, а также поступают на один из входов
элементов 20 И, на вторые входы которых через электронный ключ 24 блока
азимутальной селекции поступают прямоугольные импульсы от схемы 10
выделения заднего фронта. Эти импульсы проходят через один из элементов
20 И, на втором входе которого есть сигнал от генератора 19 импульсов, соответствующий азимутальному положению антенны, и открывают электронный ключ 22 соответствующего канала, через который сигнал от интегратора
8 поступает в соответствующий канал многоканального накопителя 13. Электронный ключ 24 закрывается сигналом с выхода схемы 23 ИЛИ при поступлении на один из ее входов сигнала от программируемого счетчика 21, который появляется после того как на вход программируемого счетчика 21 поступит N21 импульсов. Значение N21 ≤ τ19 / Tп–1 устанавливается одинаковым
во всех каналах. В результате, при каждом обороте антенны в канале многоканального накопителя 13, каждый из которых соответствует определенному
азимутальному положению антенны, поступает одинаковое количество импульсов одинаковой длительности, амплитуда которых соответствует энергии Wij радиолокационных отражений от морской поверхности. Следует отметить, что значением N21 определяется сектор ∆α усреднения для каждого
азимутального направления ∆α = N21Tп.ω.
Делитель 12 частоты пропускает на выход только каждый k-й импульс
из поступивших на его вход (k – коэффициент деления). Импульс с выхода
делителя 12 частоты задним своим фронтом запускает анализатор 15 и регистратор 16, а после задержки на время t14 во второй линии 14 задержки также
задним фронтом устанавливает в исходное (нулевое) положение все каналы
многоканального накопителя 13.
34
Таким образом, в каждом канале многоканального накопителя 13 осуществляется накопление (суммирование) сигналов, соответствующих энергии радиолокационных отражений с определенного азимутального направления за k оборотов антенны. Следовательно, время измерения tизм = 2πk/ω,
а сигналы на каждом из выходов многоканального накопителя 13 соответствуют средней энергии Wср1. Wср2, Wсрi, ... WсрN радиолокационных отражений
с определенного азимутального направления α1, α2, ..., αi, ..., αN. Требуемое
время измерения задают, устанавливая соответствующее значение коэффициента k деления в делителе 12. За время t14 задержки импульса во второй
линии 14 задержки должна обеспечиваться передача массива {Wср} из многоканального накопителя 13 в анализатор 15. Далее анализатор 15 на основании
сравнения между собой элементов массива выбирает максимальный из них.
Сигнал с выхода анализатора 15 Wсрmax = Wсрi, значение которого связано с высотой поверхностных волн, измеряется регистратором 16. Кроме того,
на регистратор передается от анализатора 15 номер i-го канала, определяющий генеральное направление αГ, распространения поверхностных волн
αГ = αi + π [81].
Устройства [82] и [83] отличаются лишь по конструктивному исполнению, направленному на повышение точности измерения высоты поверхностных волн.
Недостатками приведенных устройств являются сложность технологического исполнения, и отсюда необходимость согласования уровней синхронизации сигналов РЛС с достаточно большим количеством элементов (узлов), высокая погрешность результатов измерения при возникновении случайной помехи и флуктуация угловой скорости вращения антенны, а также
необходимость наличия соответствующей квалификации и опыта оператора.
Вывод: необходима разработка устройства, устраняющего указанные
недостатки, а именно упрощение конструктивного исполнения устройства,
повышение точности измерения характеристик морского волнения.
35
1.5. Анализ способов определения интенсивности морского волнения с
помощью ИСЗ
В настоящее время спутниковые микроволновые приборы различных
диапазонов длин волн используются для глобального мониторинга скорости
и направления ветра над водной поверхностью, определения зон осадков и
оценки их интенсивности, картирования и измерения характеристик ледового
покрова, измерения влагосодержания и водозапаса атмосферы над океаном,
определения параметров волнения [92].
Дистанционное зондирование из космоса в видимом диапазоне основано на наблюдении яркости рассеянного и отражённого океаном солнечного
света. Такую съёмку ведут с помощью оптических камер и сканеров: из российских – это многозональные сканеры МСУ-М, МСУ-СК и МСУ-Э на спутниках «Ресурс-О» и «Метеор», «Океан»; из зарубежных – сканеры спутников
NOAA, Landsat, Spot, IRS и многих других, а также специально созданные
для изучения цвета океана системы CZCS (Coastal Zone Color Scaner) спутников Nimbus и SeaWiFS (Sea viewing Wide Field Sensor) спутника SeaStar.
Пассивное зондирование в микроволновом радиодиапазоне основано
на регистрации собственного СВЧ и радиотеплового излучения океана (системы «океан – атмосфера»); активное (радиолокация) зондирование – на излучении со спутника и приёме отраженного/рассеянного морской поверхностью радиосигнала. Основным средством активного зондирования стали радиолокаторы с антенной бокового обзора (РЛСБО) и с синтезированной
апертурой (РСА). Наибольший вклад в исследование океана внесли РСА на
спутниках Seasat, ERS-1, ERS-2, Radarsat и Envisat, среди российских –
РЛСБО на спутниках серии «Океан» и РСА на спутнике «Алмаз». На принципе активной локации работают также радиоальтиметры (для измерения
уровня океана и высоты волн) спутников Topex/Poseidon, Jason и др., и скаттерометры (для измерения поля приповерхностного ветра) NSCAT, QuikScat
и др [59].
36
Длинные поверхностные волны отображаются на радиолокационных
изображениях (РЛИ) космических систем в основном из-за наличия на их поверхности более мелких волн ряби, которые модулируются орбитальным
движением, формой волны и ветровым потоком вдоль профиля крупной волны. Методами спектрального анализа [63, 64] можно получить оценки длины
волны и направления их распространения. На различных стадиях развития
волнения картина взволнованной поверхности, изменяясь во времени и пространстве, изменяет и структуру изображения, что позволяет при помощи радиолокационных средств контролировать эти изменения.
Однако одной из главных проблем космической съемки является то,
что процедура формирования РЛИ поверхности моря обладает рядом особенностей, связанных с перемещением морской поверхности за время регистрации данных. Это приводит к искажению доплеровского спектра рассеянного сигнала и, как следствие, к существенным нелинейным искажениям
спектра волн и соответственно основных характеристик поля волнения, регистрируемого на РЛИ, по сравнению с реальным волнением. В настоящее
время механизмы формирования РЛИ поля океанских волн и эффекты, приводящие к нелинейным искажениям двумерного спектра, достаточно хорошо
изучены [9, 67] и, кроме того, разработан ряд алгоритмов, позволяющих минимизировать обусловленные ими ошибки [129].
Еще в начале 90-х гг. прошлого века были разработаны и верифицированы итерационные схемы для преобразования спектра РЛИ (спектра изображения) в спектр реального волнения, в которых спектр РЛИ характеризовал реальное волновое поле. Теория подобного нелинейного преобразования,
разработанная в работе [136], впоследствии была усовершенствована в [137,
139, 140]. Эти и подобные схемы инверсии данных были основаны на аппроксимации нелинейного преобразования по методу Хассельмана и успешно применялись для обработки и анализа радиолокационных данных спутников ERS-1 и ERS-2 (рисунок 1.13). Основные недостатки этих алгоритмов состоят в необходимости знания априорного (или модельного) спектра волне-
37
ния для того, чтобы устранить 180°-ю неоднозначность по направлению распространения волн с целью оценки реального направления распространения
волновых систем. Для этого использовался модельный спектр волнения, который являлся результатом счета в моделях предсказания, например WAMмодели (Wave Prediction Model), с помощью которой можно рассчитать направленный двумерный спектр волнения и затем получить оценки направления, длины и высоты значимых волн и зыби в океане.
Рисунок 1.13 – Спутник Envisat-1
В настоящее время разработан алгоритм, получивший название «алгоритм ESA», для определения спектральных характеристик океанских волн из
данных ИСЗ Envisat, полученных в режиме съемки «Wave Mode». В нем для
определения направления распространения волновых систем используется
кросс-спекральный метод анализа РЛИ [132, 133]. Для этого рассчитываются
кросс-спектры, которые получаются путем комплексной обработки РЛИ, по-
38
лученного при синтезе с различным, но небольшим количеством накоплений
по азимуту. Мнимая часть кросс-спектра дает однозначную информацию
о направлении распространения волн, в связи с чем отпадает необходимость
использования результатов счета волновых моделей для получения этой информации. Кроме того, этот алгоритм позволяет снизить отношение «сигнал
– шум», что позволяет получать информацию о более коротковолновых системах поля волнения, чем при использовании стандартного метода [133].
В результате этих исследований перед запуском спутника Envisat был
разработан специальный волновой продукт ASA_WVW_2P
–
Ocean Wave
Spectra (спектр волн), в отличие от продукта ИСЗ ERS-1 и ERS-2
–
ERS.SWM.UWA (спектр РЛИ), который является результатом обработки
РЛИ в режиме «Wave Mode». Режим «Wave Mode» позволяет получать кадры
размером 5 × 5 или 10 × 10 км с интервалом вдоль трассы 100 км, размер и
разрешение которых достаточны для последующей спектральной обработки.
Продукт ASA_WVW_2P может поставляться потребителям в режиме квазиреального времени.
В настоящее время на рынке существует большой выбор специального
(в том числе коммерческого) программного обеспечения (ПО), позволяющего
проводить все виды обработки радиолокационных изображений космической
съемки. В частности, существует как специальное ПО для решении задач
восстановления поля ветра, построения спектров РЛИ, выделения и классификации пятен нефти на РЛИ и детектирования судов, так и позволяющее
решать все эти задачи комплексно. Среди них NEST разработки ESA,
SARTool разработки французской компании Boost Technologies (ныне
Division of Radar Applications of CLS) [145] и ScanEx Image Processor отечественной разработки [59].
Большинство перечисленных устройств позволяют вести глобальный
мониторинг Мирового океана и их данные доступны через Интернет с пространственным разрешением 10 × 10 км. Однако в случае плохих погодных
39
условий данные о параметрах морского волнения могут достигать погрешности 300 % либо отсутствовать полностью [145].
Выводы.
1. Для практического применения на судне спутниковые методы определения параметров морской поверхности при движении в штормовых условиях малоприменимы. Получение карт морского волнения требует установки
дополнительного дорогостоящего оборудования. При сложных метеоусловиях получении информации о параметрах волнения может иметь значительные задержки когда такая информация становятся уже неактуальна для принятия решения о способе штормования.
2. При разработке судовых методов определения параметров взволнованной морской поверхности данные спутникового зондирования могут использоваться для калибровки результатов измерений другими методами.
1.6. Влияние состояния атмосферы на дальность
радиолокационного наблюдения
1.6.1. Ослабление, вносимое дождем
Поглощение и рассеяние радиоволн каплями выражены тем резче, чем
выше частота, т.е. чем ближе по величине диаметр капель к длине волны. В
диапазоне 10 см и на более коротких волнах, эти эффекты имеют существенное значение, а на волнах, превышающих 10 см, влияние дождя резко
уменьшается. Известно также, что удельное (на единицу длины) поглощение
взвешенными в воздухе каплями воды и дождя превышает суммарное удельное поглощение кислородом и водным паром атмосферы.
Ослабление радиоволн дождем в практических расчетах удобно выражать как функцию интенсивности осадков R, которое зависит как от содержания единицы объема воды в жидкой фазе, так и от скорости падения капель, зависящей, в свою очередь, от размера капель. Экспериментально опре-
40
делено распределение в горизонтальной плоскости размера водных капель в
дождях различной интенсивности. Оказалось, что чем выше интенсивность
дождя, тем больше размер капель и пределы разброса их диаметра. Однако
для того, чтобы определить действительное распределение водных капель по
их размерам при падении в воздухе, необходимо для каждой интенсивности
дождя установить соотношение между скоростью падения капель и их диаметром.
Ослабление (дБ/км) можно приближенно вычислить по формуле [104]
r
Lд = K ∫ [R(r )] dr ,
α
(1.9)
0
где К – коэффициент затухания зависящий от интенсивности дождя;
R(r) – распределение интенсивности дождя вдоль распространения r;
r – протяженность трассы в зоне дождя, км;
α – коэффициент, учитывающий потери частоты излучения.
Наибольшую неопределенность при расчетах ослабления радиоволн
дождем, производимых по теоретически полученным формулам, вносит
крайняя ограниченность имеющихся данных о распределении размеров водяных капель в дождях различной интенсивности, при различной погоде и в
различных климатических районах. Совершенно очевидно, что в дождях
одинаковой интенсивности должно быть и одинаковое распределение водяных капель по их размеру. Однако изучение этого вопроса показывает, что
каждой данной интенсивности дождя соответствует некоторое наиболее вероятное распределение капель по их размеру. Результаты этого изучения
приведены в таблице 1.2.
В этой таблице для различной интенсивности дождя дано процентное
распределение капель по их диаметру во всем объеме пространства, занимаемого осадками. На основе этих данных рассчитаны поперечные сечения
поглощения водяными каплями различного размера. Полученные значения
использованы для расчета ослабления, вносимого дождем.
41
Таблица 1.2 – Процентное распределение капель по их диаметру во всем
объеме пространства, занимаемого осадками
Диаметр капли d, см
Интенсивность дождя ρ, мм/ч
слабая мо-
слабый
сильный
сплошной
рось, %
дождь, %
дождь, %
ливень, %
0,05
28,0
7,3
2,6
1,0
0,1
50,1
27,8
11,5
4,1
0,15
18,2
32,8
24,5
7,5
0,20
3,0
19,0
25,4
11,7
0,25
0,7
7,9
17,3
13,9
0,30
3,3
10,4
17,7
0,35
1,1
4,3
16,1
0,40
0,6
2,3
11,9
0,45
0,2
1,3
7,7
0,50
0,6
3,6
0,55
0,2
2,2
0,60
1,2
Значение интенсивности дождя следует рассматривать как:
0,25 мм/ч – слабая морось;
2,5 мм/ч – слабый дождь;
12,5 мм/ч – сильный дождь;
150 мм/ч – сплошной ливень.
Так как полная эффективная площадь ослабления водяными каплями
(из-за поглощения и рассеяния) зависит от температуры (температура влияет
на диэлектрические свойства воды), представляется необходимым оценить
ослабление, вносимое дождем с учетом температуры.
В таблице 1.3 приведены рассчитанные значения ослабления, вносимого дождями различной интенсивности при распределении радиоволн диапазона 3,2 и 10 см для t = +18°С.
42
Таблица 1.3 – Ослабления дождями различной интенсивности для t = +18°С
(дБ/км)
Длина радиолокационной волны
Интенсивность дождя ρ,
мм/ч
λ= 3,2 см
λ= 10 см
0,25
0,0019
0,0000997
2,5
0,0317
0,000785
12,5
0,238
0,00364
150
4,39
0,481
Используя формулу расчетной дальности радиолокатора
Dmax = 4
Pu Gu2 λu2η1η 2
(4π )3 ⋅ Pmin
и учитывая потери из-за дождя, формула дальности действия радиолокационной системы примет следующий вид [17, 104]:
Dmax Lд = 4
Pu Gu2 λu2η1η 2
(4π )
3
⋅ Pmin
e −0, 23 Lд Dmax Lд ,
(1.10)
где Pи – мощность передатчика;
Gи – коэффициент направленного действия антенны;
λ – длина волны;
η1/η2 – коэффициент полезного действия передающего/приемного антенно-волнового тракта;
Pmin – мощность на входе приемника, ограниченная его чувствительностью, т. е. его пороговым значением;
Lд – коэффициент учитывающий потери из-за дождя.
В связи с тем что полученное выражение является трансцендентным,
его решение осуществляется методом последовательных приближений [30].
Т. к. интенсивность дождя в горизонтальной плоскости неравномерна
[80] формулу (1.10) можно использовать при дальности, не превышающей
нескольких сотен метров, что допустимо в рамках поставленной задачи исследования.
43
Имея значения Lд, можно рассчитать дальность действия радиолокационной системы для 3.2- и 10-сантиметрового диапазона, для осадков различной интенсивности. Результаты расчета Dmax Lд приведены в таблице 1.4.
Таблица 1.4 – Dmax Lд при воздействии осадков различной интенсивности
Интенсивность
Dmax Lд, м
дождя ρ, мм/ч
λ = 3,2 см
λ = 10 см
0
67441,2
74339,2
0,25
32114
43728,9
2,5
28100,5
37169,6
12,5
16976,4
33740,5
150
14978
30466,7
Для определения суммарного ослабления, вносимого дождем, выпадающим в пределах данной грозовой зоны, необходимо иметь сведения о
природе (происхождении самой грозы) и, следовательно, о том, как в грозовой зоне распределены интенсивность дождя и размер водяных капель.
1.6.2. Ослабление, вносимое туманом
Основным свойством, которым характеризуется туман, является
уменьшение видимости. Видимость определяется как максимальная дальность в данном направлении, на которой еще возможно распознать невооруженным глазом в дневное время рельефный темный объект на фоне неба, а в
ночное время – известный, желательно нефокусированный источник света
умеренной интенсивности. Хотя видимость зависит от размера капель, их
числа и в меньшей степени от содержания воды в жидкой фазе, на практике в
настоящее время видимость приближенно соотносится именно с содержанием в тумане воды в жидкой фазе (рисунок 1.14). Поэтому ее величину можно
использовать для оценки ослабления радиоволн, вносимого туманом [38].
44
В таблице 1.5 приведена величина ослабления, вносимого туманом, при
температуре 0°С. Это ослабление зависит от температуры, поскольку диэлектрическая проницаемость воды является функцией температуры.
Таблица 1.5 – Ослабление Lт, вносимое туманом
Lт, дБ/км
Видимость, м
λ = 3,2 см
λ = 10 см
80
0,20
0,02
120
0,04
0,005
300
0,007
0,001
Необходимо отметить, что ослабление, вносимое туманом, для волн
диапазона 3,2 см на порядок выше, чем для диапазона 10 см.
1.6.3. Ослабление, вносимое градом
В настоящее время сделаны выводы о том, что ослабление, вносимое
градом (Lгр), составляет лишь 1 % от ослабления, вносимого дождем, и что
облака, состоящие из кристаллов льда, вообще не вносят заметного ослабления, а снег вызывает очень малое ослабление радиоволн даже при очень
сильных снегопадах, достигающих 125 мм/ч. Однако ослабление, вызванное
отражением от сферических частиц, покрытых пленкой с другой диэлектрической проницаемостью, оказывается иным, чем в тех случаях, когда рассматриваются сухие частицы.
Так, например, если ледяная сферическая частица радиусом 0,2 см при
таянии покрывается пленкой воды толщиной в одну десятую радиуса, то рассеяние радиоволн диапазона 10 см такой сферой составляет приблизительно
90 % от рассеяния водяной каплей такого же размера.
Ослабление, вносимое тающими частицами льда, находящимися в зоне
температур непосредственно под областью температур изотеры, может быть
значительно больше ослабления в зоне снега (над областью изотеры или
45
уровня таяния), а при некоторых условиях – превышать ослабление в зоне
дождя (ниже области нулевой изотеры). Дальнейшее таяние частиц льда не
может привести к существенному повышению ослабления, а может вызвать
уменьшение коэффициента отражения частицы вследствие того, что она
примет форму, близкую к сферической, или вследствие распада частицы на
более мелкие. Это явление в сочетании с более высокими конечными скоростями падения частиц града по сравнению с каплями дождя вызывает возникновение так называемой «яркой полосы» вблизи нулевой изотеры [28].
1.6.4. Ослабление, вносимое облаками
Под каплями, образующими облака, понимают водяные или ледяные
частицы радиусом менее 100 мкм. При таких размерах частиц вносимое ослабление для падающего излучения с длиной волны, превышающей 0,5 см,
становится независимым от характера распределения частиц по их размерам.
В формулах для расчета ослаблении радиоволн, вносимого облаками, влажность учитывается множителем, характеризующим содержание воды в жидкой фазе (в г/м3).
Концентрация жидкой воды в облаках обычно изменяется от 1
до 2,5 г/м3, хотя в отдельные моменты времени содержание жидкой воды в
кучевых перенасыщенных облаках достигало 4 г/м3. В облаках, образованных
кристаллами льда, содержание воды (в пересчете на жидкую фазу) редко
превышает 0,5 г/м3, а зачастую и меньше 0,1 г/м3. Ослабление, вносимое облаками, состоящими из капель воды, можно выразить соотношением
Loб = K ⋅ M ,
(1.11)
где К – удельный погонный коэффициент затухания, дБ м3/км г;
М – водность облаков, г/м3.
Таблица 1.6 показывает, что ослабление, вносимое водяными облаками,
возрастает при снижении температуры.
46
Таблица 1.6 – Ослабление Lоб, вносимое облаками (для λ = 3,2 см)
Lоб, дБ/км
Температура, °С
Водяное облако
Ледяное облако
20
0,0483
10
0,0630
0
0,0858
–8
0,112
0
2,46·10-3
–10
8,19·10-4
–20
5,63·10-4
Вносимое облаками ослабление уменьшается с увеличением длины
волны. Ослабление, вызванное ледяными облаками, почти на два порядка
меньше, чем ослабление водяными облаками с таким же содержанием жидкой воды [53].
1.6.5. Результаты измерений влияния метеорологических условий
на распространение радиоволн судовой РЛС
Общее ослабление радиолокационного сигнала, вызванное влиянием
гидрометеоров, добавит в формулу (1.10) коэффициент
Lпот = Lд + Lт +Lгр +Lоб ,
(1.12)
учитывающий потери из-за дождя, тумана, града и облаков. Формула приняла вид
Dmax Lпот = 4
Pu Gu2 λu2η1η 2
(4π )
3
⋅ Pmin
e −0, 23 Lпот Dmax L .
(1.13)
Для практической проверки влияния метеорологических условий на
распространение радиоволн судовой РЛС, в работе был проведен эксперимент по определению дальности до судна-цели при различных погодных условиях с помощью транспондера автоматической идентификационной системы. Транспондер АИС предназначен для обмена навигационной информацией между судами и береговыми службами – информацией о судне (позыв-
47
ной, наименование, координаты, размеры и т. п.), его грузе (тип, наименование, категория безопасности), маршруте следования и параметрах движения
(истинная скорость, курс и др.) – с целью предотвращения столкновений,
контроля режима плавания и мониторинга судов [26, 127].
Сущность эксперимента заключалась в следующем: на экране РЛС с
помощью визира дальности и направления определяется направление и дальность на только что появившееся судно-цель. Далее снимается информация о
размерах и курсе цели с судовой АИС. Когда цель исчезает с экрана, снимается пеленг и дистанция на его последний след. По судовому журналу, а также путем визуальных наблюдений определялись данные о погоде и состоянии моря. Измерения были проведены не менее чем для 21 судна различных
размеров при разных погодных условиях. Результаты эксперимента сопоставлялись с теоретическими расчетами.
Проекция цели по отношению к наблюдающему судну характеризует
площадь отражающей поверхности цели (рисунок 1.15) и может быть найдена по формуле
R = L ⋅ sin α + B ⋅ cos α ,
(1.14)
где L – длина цели; B – ширина цели; α – обратный курсовой угол цели.
Рисунок 1.15 – Проекция размера цели
В таблице 1.7 приведены результаты дальности практического обнаружения целей с учётом проекций их размеров и состояния окружающей среды
в сравнении с теоретической дальностью обнаружения.
48
Таблица 1.7 – Дальность обнаружения судов различного размера в зависимости от погодных условий
Состояние
атмосферы
Сост.
моря,
баллы
Дистанция, морские мили
Проекция
Проекция
Проекция
Проекция
80–140 м
140–200 м
200–260 м
260–320 м
теор. практ.
теор.
практ.
теор.
практ.
теор. практ.
ясно
1
18,05
23,36
19,74
24,00
21,08
24,00
22,20
24,00
ясно
2
17,30
19,46
18,92
20,22
20,20
22,03
21,27
22,06
ясно
3
15,05
16,09
16,45
16,74
17,56
17,58
18,50
18,43
ясно
4
14,70
15,02
16,07
15,31
17,16
16,92
18,08
17,32
туман,
видимость
600 м
1
14,77
14,24
16,15
14,43
17,24
15,41
18,16
16,39
туман,
видимость
150 м
2
13,59
13,29
14,86
14,68
15,86
14,71
16,71
туман,
видимость
60 м
3
12,34
10,92
13,49
11,78
14,40
12,57
15,17
13,05
туман,
видимость
30 м
4
11,32
10,83
12,38
10,97
13,22
11,53
13,92
12,13
дождь, интенсивность
0,2 мм/ч
1
15,10
13,45
16,51
17,63
15,53
18,57
дождь, интенсивность
1 мм/ч
2
12,58
12,06
13,76
12,77
14,69
13,38
15,47
14,26
дождь,
интенсивно
сть 4 мм/ч
3
10,83
9,82
11,84
10,35
12,65
11,18
13,32
11,86
дождь,
интенсивно
сть 16 мм/ч
4
9,56
9,29
10,45
9,46
11,16
10,37
11,75
49
Теоретическая (потенциальная) дальность рассчитывалась по формуле
(1.13). Влияние окружающей атмосферы на дальность обнаружения указано
для трех состояний атмосферы над морем и состояния морского волнения.
На рисунке 1.16 приведен график сравнения теоретических и практических дистанций обнаружения судов, проекция размера которых находилась в
диапазоне 140÷200 м в зависимости от погодных условий. Пунктирной линией обозначены значения теоретической дальности обнаружения целей,
сплошной линией показаны результаты практического обнаружения судов
указанной проекции.
Рисунок 1.16 – Зависимость дальности обнаружения цели от погодных
условий проекции 140÷200 м в сопоставлении с теоретической дальностью
обнаружения целей
Проведенные исследования показали, что коэффициент корреляции
этих графиков превышает 0,9. Такой коэффициент корреляции показывает
тесную взаимосвязь между практически полученными значениями и результатами теоретических расчетов. Среднеквадратическая ошибка между теоре-
50
тическими расчетами и данными полученными экспериментальным путем не
превысила 15 % [4].
На основании проведенных исследований можно сделать вывод, что
вместе с изменением гидрометеорологической обстановки меняется уровень
принятого радиолокационного сигнала, что требуется учитывать, при разработке способа автоматического определения характеристик морской поверхности. Далее в работе предлагается формулу (1.12) использовать в качестве
коэффициента, учитывающего гидрометеорологическую обстановку вокруг
РЛС.
1.7. Выводы по первой главе
По результатам исследований, выполненных в первой главе, можно
сделать следующие выводы.
1. Существующие в настоящее время методы определения гидрометеорологических параметров вокруг судна редко применимы на морских судах
из-за сложности использования и обязательного наличия дополнительного
оборудования.
2. Для оперативного получения информации о состоянии морского
волнения вокруг судна требуется разработка новых способов определения
гидрометеорологических параметров, исключающих установку дополнительного дорогостоящего оборудования на судне.
3. Методика В. И. Сичкарева позволяет связать различную ширину засветки экрана РЛС от гребней волн с высотой морского волнения.
4. Анализ изображений для определения характеристик морского волнения в автоматическом режиме не решен, что требует разработки способов
автоматического определения состояния морской поверхности.
5. Направление распространения морского волнения на основе анализа
изображений осуществляется визуально. Возникает задача разработки спосо-
51
ба, позволяющего с судна автоматически определять направление фронта
морского волнения.
6. Для использования в практических целях, определив средние параметры волнения любым из методов, на основе функций распределения этих
значений, можно пересчитать параметры волнения к волнению нужной обеспеченности.
7. Проведенный анализ существующих устройств по определению характеристик морского волнения показал необходимость разработки устройства, устраняющего недостатки существующих, а именно упрощение конструктивного исполнения устройства, повышение точности измерения характеристик морского волнения.
8. Для практического применения на судне спутниковые методы определения параметров морской поверхности при движении в штормовых условиях малоприменимы. Получение карт морского волнения требует установки
дополнительного дорогостоящего оборудования. При сложных метеоусловиях получении информации о параметрах волнения может иметь значительные задержки когда такая информация становятся уже неактуальна для принятия решения о способе штормования.
52
Глава 2. Отражение радиоволн морской поверхностью
2.1. Отражающие свойства морской поверхности
Радиоволны отражаются от объекта в том случае, если его электрическая проводимость, диэлектрическая постоянная и магнитная проницаемость
отличаются от тех же параметров среды, в которой они распространяются.
Так как объекты имеют электрические свойства, отличающиеся от электрических свойств воздуха, то они в большей или меньшей степени обнаруживаются радиолокатором.
Морская поверхность при отсутствии волнения дает зеркальное отражение, при котором угол падения равен углу отражения, в противоположную
сторону и не обнаруживается на экране РЛС. Волнение и даже рябь создают
рассеянное отражение, в результате чего отдельные волны обнаруживаются
на расстоянии нескольких миль [41, 57, 110].
Основной характеристикой целей в радиолокации является эффективная площадь рассеяния (ЭПР). Она характеризует способность преобразовывать падающую электромагнитную волну в рассеянную волну, распространяющуюся в направлении приемника. Величина имеет размерность площади
и измеряется обычно в квадратных метрах.
Если предположить, что плотность потока мощности зондирующего
импульса Sp у элементарной площадки морской поверхности является вторичным излучателем, создающим во всей сфере радиуса r плотность потока
мощности, равную Sn, и рассеивает мощность P = 4πr2Sп, то отношение этой
мощности к плотности потока мощности, рассеиваемой в направлении приемника
SЭ =
S
P
= 4πr 2 п ,
SP
SP
называют эффективной площадью рассеяния [110].
(2.1)
53
Поверхность моря при волнении является поверхностью со сложной
шероховатостью. Она состоит из первичных, наиболее крупных и хорошо
выраженных волн, и вторичных, сравнительно небольших волн, покрывающих первичные. Некоторые участки поверхности моря покрыты пеной, пузырями, каплями рассыпавшихся гребней волн и т. п.
Функция, описывающая высоту любой точки поверхности, может быть
представлена в виде суммы нескольких слагаемых, каждое из которых опиn
сывает соответствующую структуру Fh (x, y ) = ∑ hi (x, y ) . Для практических цеi =1
лей достаточно ограничиться n = 3. Тогда h1 будет описывать первичные
волны, h2 – вторичные, h3 – эффективную высоту таких образований как
рябь, пена, капли и т. д.
Эффективная площадь рассеяния поверхности со сложной шероховатостью [50]
⎡1
Sэ = K f ⎢ 2
⎢ аш
⎣
⎛ 4πσ h
⎜1 −
λ
⎝
⎞ −
⎟e
⎠
tg 2 β
аш2
4πσ h −
+
e
λbш2
tg 2 β
bш2
⎤
⎥,
⎥
⎦
(2.2)
где Kf – коэффициент зеркального отражения;
аш2 =
4σ h21 4σ h22
+
– параметр шероховатости;
rh1
rh 2
(2.3)
rh – радиус корреляции, расстояние, при удалении на которое значения
высоты поверхности элементарных площадок ∆Si и ∆Sk будут все больше
различаться;
β – угол визирования;
⎞
⎛
λ
⎟⎟ – параметр шероховатости, зависящий от таких обраbш2 = а ш2 + ⎜⎜
⎝ 2πrh 3 cos β ⎠
зований как рябь, пена, капли и т. д.
Таким образом, эффективная площадь рассеяния поверхности, обладающей сложной шероховатостью, определяется модулем коэффициента
зеркального отражения, долей поверхности, занятой мелкой структурой,
54
среднеквадратическим значением высоты мелкой шероховатости и параметрами шероховатости крупной и мелкой структур [130].
С увеличением волнения аш2 растет, rh уменьшается. Однако так как поле поверхностных волн анизотропно в направлении распространения волны,
то при зондировании вдоль гребней морских волн шероховатость будет наименьшая, а rh максимальным. И, соответственно, минимальным при зондировании поперек гребней волн.
Существующая теория многолучевого распространения сантиметровых
и миллиметровых радиоволн над статистически неровными поверхностями
не позволяет объяснить ряд эффектов, наблюдаемых при углах скольжения,
существенно меньших эффективных наклонов неровностей [20, 60, 69,
89, 131].
Для разработки эффективных дистанционных методов необходимо более глубокое теоретическое исследование в области дифракции электромагнитных волн на статистически неровной поверхности. Строгого решения задачи дифракции на неровной поверхности не имеется. Существуют приближенные методы решения этой задачи, которые применимы при определенных соотношениях между длиной электромагнитных волн λ и характеристиками неровностей поверхности. Если длина волны λ намного больше, чем
высота неровностей h, то задача решается методом возмущений [10], основным следствием которого является резонансное рассеяние, в котором из всего спектра морского волнения только одна гармоника участвует в рассеянии.
Эта гармоника определяется длиной волны λ и углом падения ψ излучения.
В случае, когда длина волны λ намного меньше, чем характерные радиусы кривизны ρ, задача решается так называемым методом Кирхгофа (методом касательной плоскости) [143], приводящим к основному заключению о
том, что угловое распределение средней интенсивности отраженного излучения определяется функцией распределения наклонов отражающей поверхности. К этому же результату приводит и приближение геометрической оптики.
55
Сложность задачи о нахождении поля радиоволн, рассеянных морской
поверхностью, обусловлена невозможностью точного математического описания этой поверхности. Указанное обстоятельство приводит к необходимости конструирования моделей поверхности моря, в различной степени отражающих те или иные стороны реального процесса. Анализ существующих
моделей показывает, что правильные закономерности рассеяния радиоволн
поверхностью моря могут быть получены с помощью
так называемой
«двухмасштабной» (или двумерной) модели морской поверхности, предложенной Б. Ф. Курьяновым [61].
В модели Б. Ф. Курьянова поверхность моря Fh (x, y) представляется
в виде суперпозиции двух поверхностей:
Fh ( x, y ) = ξ ( x, y ) + ζ ( x, y ) .
(2.4)
Функция ξ(х, у) описывает крупные пологие волны (зыбь), функция
ζ(x, у) – мелкоструктурные образования (рябь) на их поверхности.
Считается, что поверхность ξ(х, у) удовлетворяет условиям применимости принципа Кирхгофа, а поверхность ζ(x, у) – условиям применимости метода возмущений. Поле над суммарной поверхностью Fh (x, y) находится
в виде суперпозиции двух полей: поля, рассеянного поверхностью ξ(х, у), и
возмущенного поля, вызванного мелкими неровностями на поверхности
ζ(x, у). Таким образом, в решении задачи используются оба метода: метод
Кирхгофа и метод возмущений.
Применение метода Кирхгофа для нахождения поля, рассеянного статистически шероховатой поверхностью ξ(x, у) с крупными пологими неровностями, разработано в [50, 52, 111, 122].
Сущность этого метода состоит в предположении о том, что на неровной поверхности отраженное поле можно вычислить по законам геометрической оптики, т. е. так же, как при отражении от бесконечной касательной
плоскости в данной точке поверхности. Это допущение оправдано, если радиус кривизны неровностей достаточно велик в масштабе длины волны [125].
56
Применение полученных результатов ограничивается не слишком
большими углами падения радиоволн на поверхность ξ(х, у), до 20 градусов.
В рамках метода Кирхгофа обозримые результаты получаются только
для средней интенсивности, а для вычисления флуктуации интенсивности
необходимо вычисление восьмикратных интегралов, и получить обозримые
результаты очень трудно.
Использование метода возмущения для нахождения поля, рассеянного
статистически шероховатой поверхностью ζ(x, у) с мелкими пологими неровностями, разработано в [20–23, 111]. Возмущенное поле существенно зависит
от угла облучения поверхности ζ(x, у) [110].
Для расчета средней интенсивности излучения, его флуктуации и плотности распределения разработан подход [35, 36], являющийся развитием метода зеркальных точек (МЗТ). Согласно МЗТ интенсивность излучения, отраженного от поверхности, определяется числом зеркальных точек N и радиусами кривизны ρ в точках зеркального отражения. Суть предлагаемого в
работе [35] развития МЗТ заключается в том, что отражение от точек поверхности, где кривизна отлична от нуля, рассчитывается по геометрической оптике, а для точек с нулевой кривизной ("каустические точки") – с привлечением волновой оптики. Если поверхность статистически неровная, то эта
операция осуществляется введением эффективной плотности распределения
радиусов кривизны.
Преимуществом МЗТ является то, что он имеет дело с чисто геометрическими
и
наблюдаемыми
характеристиками
поверхности
(N и ρ), причем очень чувствительными ко всяким изменениям структуры поверхности. Поэтому эти характеристики могут быть использованы для разработки эффективных дистанционных оптических методов изучения структуры
поверхности. Кроме того, для случайных гауссовых поверхностей, к числу
которых с большой точностью можно отнести и морскую поверхность, статистические характеристики радиусов кривизны ρ в точках зеркального от-
57
ражения и их числа N поддаются сравнительно полному теоретическому анализу.
Выражение для определения числа зеркальных точек N, пригодное для
практического применения, имеется для двух случаев: 1) на рассматриваемом
участке поверхности вероятность появления зеркальной точки мала, и появление следующей зеркальной точки статистически не зависит от прежней.
В этом случае зеркальные точки будут распределены по закону Пуассона;
2) на рассматриваемом участке поверхности много зеркальных точек, статистически независимых друг от друга. В этом случае зеркальные точки будут
распределены по закону Гаусса.
При зондировании возмущенной морской поверхности распределение
зеркальных точек соответствует закону Гаусса.
Среднее число зеркальных точек N1, приходящихся на единицу длины,
для одномерной гауссовой поверхности z = ξ(x) определяется выражением
N1 =
1
π
σ 12 exp
γ2
,
σ 12
(2.5)
где σ1 – дисперсия величины ξ(x);
γ – величина наклона ξ(x).
Среднее число зеркальных точек N2, приходящихся на единицу длины,
для двумерной гауссовой поверхности z = ξ(x, у) определяется как
N2 =
⎛E ⎞
E1Ф⎜⎜ 2 ⎟⎟W (γ x , γ y ) ,
π
⎝ E1 ⎠
4
(2.6)
где E1, E2 – параметры, определяемые моментами энергетического спектра
морского волнения;
Ф(x), (0 ≤ x ≤1/2) – очень медленно, монотонно убывающая функция с
максимальным и минимальным значениями, соответственно равными
Ф(0) = 1, Ф(1/2) ≈ 0,907;
W(γx, γy) – плотность распределения наклонов поверхности, которая является нормальным распределением.
58
Для определения площади морской поверхности, участвующей в обратном отражении зондирующего импульса, необходимо учитывать не только количество, но и размер зеркальных точек, характеризуемый радиусом
кривизны поверхности ρ.
Плотность распределения W(ρ) радиусов кривизны ρ для гауссовой поверхности z = ξ(x) в точках зеркального отражения с наклоном
ξ(x) = γ выведена в работах [14, 107, 134, 135].
Выражение для W(ρ), написанное для нормированного радиуса кривизны X = π
ρ
, имеет вид
ρ ср
1
2 −X2
e .
X3
W (X ) =
(2.7)
Средний радиус кривизны для двумерной поверхности определяется по
формуле
σ h3 / 2
.
2 1 + γ x2 + γ y2
π
ρ ср =
(2.8)
⋅
Для любой выпуклой поверхности при условии, что минимальный радиус кривизны поверхности значительно больше длины волны, эффективная
отражающая поверхность равна [15]
S эξ = πρ ср2 × N 2 .
(2.9)
Согласно [110] удельная эффективная площадь рассеяния мелкоструктурной составляющей (рябь) морской поверхности
S эζ
⎛ δζ
= 16π ⎜⎜
⎝ λ
4
⎞
⎟⎟
⎠
2
⎛ lζ
⎜⎜
⎝λ
2
2
2
2
⎞
⎟⎟ 12 α x4 + 4α y4 sin 4 Θ + 3α x2 sin 2 2Θ + cos 4 Θ e − 4π (lζ λ ) sin Θ , (2.10)
⎠
[ (
)
]
где δζ – дисперсия величины ζ(x, y);
lζ – радиус пространственной корреляции;
θ – угол падения зондирующего импульса;
αx – угол облучения участка водной поверхности между падением зондирующего импульса и генеральным направлением распространения морского
волнения;
59
αy – угол облучения участка водной поверхности между падением зондирующего импульса и перпендикуляром к генеральному направлению распространения морского волнения.
Усиление ветрового волнения приводит к увеличению Sэ.ζ – результат
уменьшения угла падения радиоволн на склоны крупных пологих волн, покрытых рябью.
При больших углах падения, когда cos θ << αx4√12, в теории волн малого наклона можно пользоваться приближенной формулой [110]
S эζ
⎛δ
= 192π ⎜⎜ ζ
⎝ λ
4
⎞
⎟⎟
⎠
2
⎛ lζ
⎜⎜
⎝λ
2
⎞ 4 4 −4π 2 (lζ λ )2 sin 2 Θ
⎟⎟ α x sin Θe
,
⎠
(2.11)
При малых углах падения, если cos θ >> αx4√12 – приближенной формулой
S эζ
⎛δ
= 16π ⎜⎜ ζ
⎝λ
4
⎞
⎟⎟
⎠
2
⎛ lζ
⎜⎜
⎝λ
2
⎞
− 4π 2 (lζ λ )2 sin 2 Θ
⎟⎟ cos 4 Θe
.
⎠
(2.12)
Анализ выражения (2.12) показывает, что при больших углах падения
на зависимость Sэ.ζ от θ может оказывать влияние анизотропия поверхности
ζ(x, y). С уменьшением угла падения для углов наклона крупных волн в направлении 0Y, перпендикулярном плоскости падения, Sэ.ζ падает, зависимость
Sэ.ζ. от анизотропии практически не проявляется.
Для расчета мощности отраженного от поверхности моря сигнала необходимо учитывать не только ее структуру, но и вид излучения, длительность импульса и угол визирования. Структура поверхности определят наличие когерентной и некогерентной составляющей в отраженном сигнале.
Мощность когерентной составляющей [50]
Pкг =
Pп G 2 S э
4π (2 H )
2
2
Kf e
⎛ 4π
⎞
σh ⎟
−⎜
⎝ λ
⎠
где Рп – мощность передатчика;
G – коэффициент усиления антенны;
Н – высота волны.
Мощность некогерентной составляющей
2
,
(2.13)
60
Pнкг =
K 2f
Pп S э
2
(
)
G
x
y
,
dxdy ,
aш2
16π 2 R0 ∫s
(2.14)
где R0 – расстояние до отражающей поверхности.
Если
шероховатость
поверхности
имеет
смешанную
структуру
и H > λ/4, то когерентная составляющая близка к нулю, а некогерентная определяется формулой
2
Pп S э K f
Pнкг (τ и ) =
⋅
cτ и G ,
16π 2 R03 a ш2
(2.15)
где τи – длина зондирующего импульса;
с – скорость света.
С увеличением высоты морского волнения площадь элементарных отражающих площадок в сторону приемника и, соответственно, мощность отраженного сигнала Pнкг в сторону приемника РЛС растет. Зная мощность излучения и коэффициент усиления антенны, можно определить среднее значение высоты первичных морских волн.
Из формул (2.3), (2.6), (2.8), (2.9), (2.15) и с учетом затухания сигнала,
вызванного изменением гидрометеорологической обстановки, среднеквадратическое значение высоты морского волнения составит
(
)
2
32 Pнкг 1 + γ x2 + γ y2 π ⋅ R03
σh =
⋅ e −0, 23 Lпот R0 .
Pп E1Ф⎛⎜ E2 ⎞⎟W (γ x , γ y )K 2f rh cτ и G
⎝ E1 ⎠
(2.16)
Средняя высота волн hср связана со среднеквадратическим значением
высоты морского волнения σ h соотношением [75]
hср = 8πσ h2 .
(2.17)
Проведенные исследования показали, что основным параметром,
влияющим на значение высоты волнения, является Pнкг.
Выводы.
1. Характеристики зеркальных точек и уровень шероховатости очень
чувствительны к изменению параметров морской поверхности, что в свою
очередь влияет на уровень сигнала, отраженного в сторону РЛС, величина
61
которого будет использована для практического определения высоты морского волнения.
2. Влияние удельной эффективной площади рассеяния морской поверхности на принимаемый сигнал судовой РЛС на больших судах с высоким
расположением антенны РЛС проявляется сильнее, чем на маломерных.
3. Для небольших судов информация о морском волнении более актуальна, т. к. согласно существующим рекомендациям при плавании судна в
штормовых условиях для них более вероятно попадание в область наибо-лее
неблагоприятных, а также опасных сочетаний скорости и курсовых углов бега волн (λ/L = 0,7÷1,3).
4. По уровню мощности отраженного от морской поверхности сигнала
РЛС можно определить значение средней высоты морского волнения с достаточной для конечной цели работы точностью.
2.2. Определение направления распространения морского волнения
на основе статистической структуры поля
Существуют различные способы интерпретации метеорологических
данных [34]. В настоящей работе направление распространения морского
волнения предлагается определять, основываясь на информации о статистической структуре полей морских волн.
С математической точки зрения поля морского волнения весьма изменчивы как в пространстве, так и во времени. Поэтому для таких полей оказывается очень плодотворным использование статистического подхода, при котором они рассматриваются как случайные. В различных случаях элемент такого поля может принимать различные значения. Совокупность этих значений для рассматриваемого объема пространства в данном интервале времени
представляет собой реализацию случайного поля.
Выбирая данные поля морского волнения на определенном участке, характеризующемся в некотором смысле одинаковыми внешними условиями,
62
можно в принципе получить бесчисленный набор реализаций случайного поля. Статистический подход позволяет отказаться от попытки раздельного
рассмотрения их индивидуальных свойств. Рассматривая лишь их статистические характеристики, можно установить общие особенности, характерные
для всего набора реализаций. Эти общие особенности принято называть статистической структурой случайного поля.
При этом имеется в виду, что статистическое осреднение производится
по всему набору возможных реализаций поля выбранного участка.
Если Fh(x, y, t)
f
j
(d) есть j-я реализация случайного поля (d – радиус-
вектор точки, а среди координат поля могут быть и пространственные координаты и время), а всего таких реализаций N, то статистическое осреднение,
производится по формуле
f (d ) =
1 N
∑f
N j =1
j
(d ) .
(2.18)
Величина f характеризует среднее из возможных значений в данной
точке в данный момент времени. Наряду с этим представляет интерес рассмотрение величин, описывающих отклонение величины f от среднего. Для
оценки возможного разброса величины используется значение дисперсии,
представляющей собой средний квадрат отклонения ее от средней величины
σ 2f (d ) = [ f (d ) − f (d )] .
2
(2.19)
Величина σf называется среднеквадратическим отклонением величины f.
В связи с тем что структура поля морского волнения представляет собой поле с различной шероховатостью в разных направлениях, то в каждой
отдельной реализации такого поля прирост величины f в той или иной точке
зависит от направления. В связи с этим встает вопрос о том, насколько близки к этому значению значения f в окружающих точках. Простейшей характе-
63
ристикой статистической связи является ковариационная функция величины
f, которая для любой пары точек di и dk определяется по формуле
[
][
]
m f (d i , d k ) = f (d i ) − f (d i ) f (d k ) − f (d k ) ,
(2.20)
которая для каждой пары точек ri и rk дает коэффициент ковариации значений величины f.
Морскую поверхность для одного участка в разные моменты времени
можно рассматривать как двумерное поле нескольких величин с возможностью оценки связи между ними. Эту связь можно характеризовать взаимными ковариационными и корреляционными функциями.
Так, для поля двух случайных величин f(d) и g(d) их взаимная ковариационная функция имеет вид [57]
[
]
m fg (d i , d k ) = f (d i ) − f (d i ) [g (d k ) − g (d k )] ,
(2.21)
a нормированная взаимная корреляционная функция
µ fg (d i , d k ) =
m fg (d i , d k )
σ f (d i )σ g (d k )
.
(2.22)
В литературе для обозначения этой функции используется также термин «кросскорреляционная функция». Часто, для того чтобы подчеркнуть,
что рассматривается связь между значениями одной и той же величины, вместо термина «ковариационная и корреляционная функция» используются
термины «автоковариационная и автокорреляционная функции». Однако далее в работе будет использоваться термин «корреляционная функция».
Одним из способов выявления неоднородности, а как следствие, и направления шероховатости является анализ полученных в процессе расчета
статистических характеристик, в первую очередь корреляционных функций [31].
Для оценки анизотропии поля производится расчет двумерных корреляционных функций. Расчет эмпирических оценок корреляционных функций
ведется в скользящих перекрывающихся окнах по расстоянию и углу либо по
широте и долготе. Процесс расчета двумерной корреляционной функции
представлен на рисунке 2.1. Между данными из фиксированного сектора,
64
обозначенного на рисунке цифрой 1, и данными субсектора, выбираемыми из
перемещающегося вокруг первого сектора, обозначенного на рисунке цифрой 2, рассчитывается коэффициент корреляции. Субсектор смещается с постоянным фиксированным шагом по широте и долготе из верхнего левого в
правый нижний угол поля. В месте нахождения центра субсектора присваивается значение рассчитанного коэффициента корреляции. В результате перемещения субсектора по всему выбранному полю рассчитанные коэффициенты корреляции представляют собой двумерную корреляционную функцию,
вписанную в сектор 1.
Рисунок 2.1 – Процесс расчета двумерной корреляционной функции.
1 – фиксированный сектор расчета двумерной корреляционной функции;
2 – перемещающийся по широте и долготе субсектор
На рисунке 2.2 в качестве примера приводится двумерная корреляционная функция, построенная по данным дистанционного зондирования водной поверхности со сканера SeaWiFS в 1998 г [25].
65
Рисунок 2.2 – Пример двумерной корреляционной функции двумерного
случайного поля
В случае отсутствия волнения морскую поверхность условно можно
рассматривать как однородное и изотропное поле. Для такого поля одноточечные статистические характеристики (например, средние и дисперсии) являются одинаковыми во всех точках поля, а двухточечные характеристики
(например, корреляционные функции) зависят лишь от расстояния между
точками. С увеличением расстояния между точками ковариационные и корреляционные функции, вообще говоря, убывают, хотя это убывание может и
не быть монотонным. При больших расстояниях связь между значениями
элементов поля практически отсутствует, соответственно, ковариационные и
корреляционные функции стремятся к нулю.
Выводы.
1. Статистические характеристики поля морского волнения позволяют
определить параметры пространственной структуры поля, основным критерием которого в рамках работы является направление шероховатости.
2. Направление фронта распространения морского волнения в работе
предлагается определять по направлению корреляционных функций, характеризующих шероховатость поверхности.
66
2.3. Анализ интерпретации волнения и сигналов РЛС,
отраженных от моря
Волнение относится к явлениям, элементы которых имеют повторяющийся характер. Реальное волнение моря представляет собой протекающий
во времени нерегулярный трехмерный процесс. Следующие одна за другой
волны различаются между собой по амплитуде, периоду, длине и форме.
Протяженность гребней ветровых волн невелика и составляет около 2–3 длин
волны. У зыби протяженность гребней значительно больше. В ряде случаев
она рассматривается как плоские волны, т. е. как двухмерные волны с бесконечной длиной гребней. Предельные высоты ветровых морских волн составляют 20÷30 м, а их длина не превышает 600 м.
Нерегулярность и определенная хаотичность взволнованной поверхности моря дали основание представлять волнение в виде случайного стационарного процесса. При этом волнение рассматривается как суперпозиция
(наложение) бесконечного множества элементарных гармонических (синусоидальных) плоских волн, отличающихся по амплитуде, частоте, направлению.
Морское волнение анализируют во времени и в пространстве. При решении задачи нахождения параметров волнения по сигналам РЛС высота h
морской волны рассматривается как случайная функция трех аргументов:
h = Fh(x, y, t).
(2.23)
Для получения данных о волнении анализируется обычно информация
РЛС о небольшом участке акватории около судна, порядка ± 600 м по х и у.
Можно назвать такой участок субакваторией.
Начало системы хоу помещается в точке субакватории, соответствующей расположению антенны РЛС. Как высота волны h, величина U напряжения принятого и усиленного до определенного уровня отраженного от моря
сигнала РЛС, может рассматриваться как случайная функция аргументов х,
у, t.
67
U = FU(x, y, t).
(2.24)
Функция U (2.24) отражает с определенными искажениями функцию F
(2.23). Поэтому ее называю радиолокационным образом h. Задача получения
параметров волнения состоит в оценке характеристик функции (2.23) по ее
радиолокационному образу (2.24).
При работе РЛС появляется радиолокационный образ взволнованной
субакватории около судна, благодаря отражению посылаемых РЛС сигналов
от склонов волн, обращенных к антенне, и отсутствию эха от склонов волн,
находящихся в зоне радиолокационной тени. Наилучшее условие для отражения радиоволн соответствует направлению оси антенны в сторону, откуда
приходят морские волны. Полученная с приемника РЛС в течение определенного интервала времени совокупность отраженных от моря сигналов
представляет собой одномерную реализацию однородного случайного трехмерного поля (2.23) [142].
Преобразованная в цифровой вид совокупность последовательных сигналов от моря обозначается как Ux,y,t. По значениям Ux,y,t, принадлежащих
субакватории, расположенной в направлении распространения морского волнения, с помощью быстрого преобразования Фурье возможно нахождение
спектральной функции отраженных сигналов [42, 124]
n −1
s ( X ) = A0 + 2∑ ( Am cos 2πmf1t + Bm sin 2πmf1t ) + Aп cos 2πnf1t ,
(2.25)
m =1
где f1 =
1
;
∆D разр
А0,m,n, Вm – коэффициенты Фурье [58].
Средняя спектральная мощность сигнала согласно теоремы Парсеваля
[42]:
1
N
∑ (Pλ − R ) = 2∑ R
λ
n −1
=− n
2
0
n −1
m =1
2
m
+ Rn2 ,
(2.26)
где Ri = Ai2 + Bi2 – вклад гармоники в среднюю спектральную мощность сигнала.
68
После разложения средней спектральной мощности сигнала на отдельные гармоники строится график спектральной мощности (рисунок 2.3).
Рисунок 2.3 – Пример спектра Фурье
Истинная скорость бега плоской морской волны (рисунок 2.4) связана с
частотой волны соотношением, полученным Ле Блондом и Мусаком [27]:
V =
g
ω2
,
где g – ускорение свободного падения.
Рисунок 2.4 – К характеристике морских волн
(2.27)
69
С учетом того, что длина волны λ есть расстояние между соседними
гребнями волн, выражение для определения длины волны
λ=
2πg
ω2
.
(2.28)
При проведении экспериментов по программе Orama (Operational Radar
and Optical Mapping in monitoring hydrodynamic, morphodynamic, and environmental parameters for coastal management) Ф. Зиммер в [146, 147] показал, что
частота морского волнения на глубинах менее 4 длин волн связана с глубиной следующим соотношением (рисунок 2.5):
ω H = ω tanh (ωH ) ,
(2.29)
где tanh(ωH) – коэффициент, учитывающий влияние мелководья;
H – глубина.
Рисунок 2.5 – Значения коэффициента tanh(ωH) в зависимости
от глубины
В пределах «диапазона больших глубин» (длина волны короче, чем
λ = 4h) коэффициент незначительно меньше «1». Для диапазона «промежуточных глубин» (от λ = 4h до λ = 20h) наблюдаются наибольшие изменения.
Работа Ф. Зиммера была посвящена определению изменчивости морского дна в районе песчаных мысов. Однако для целей данной работы, ис-
70
пользуя информацию о глубине, полученную от эхолота или электронной
картографической системы, из формулы (2.27) можно точно рассчитать скорость морского волнения
V=
g tanh (ωH )
ω
.
(2.30)
На основании изложенного материала можно сделать следующие выводы.
1.Частоту морского волнения возможно определять с помощью метода
быстрого преобразования Фурье по направлению распространения морского
волнения.
2. Другие параметры волнения возможно определить из высоты и частоты волн с помощью простых формул и информации от конвенционного судового оборудования.
3. При расчете длины морского волнения в случае ее уменьшения при
сохранении высоты волн судоводители могут быть предупреждены об
уменьшении глубины в направлении движения судна.
2.4. Анализ структуры данных радиолокационного зондирования
Особенностью работы радиолокационных станций является то, что принимаемый сигнал имеет радиальную структуру, поэтому в настоящей работе
при изучении изменчивости и динамики морской поверхности, оценок характеристик динамической изменчивости возникла необходимость интерполяции данных, полученных в неравномерно распределенных точках наблюдений в узлы заданной регулярной сетки. На рисунке 2.6 показан пример распределения данных радиолокационного зондирования на сетку равномерно
распределенных узлов. Заполненные окружности показывают положение
данных об уровне принимаемого сигнала на плоскости. Сетка равномерных
наблюдений показана знаками «+» [6].
71
Эта вычислительная процедура получила в литературе название «объективного анализа» [34]. В настоящее время для объективного анализа применяются методы полиномиальной, сплайновой аппроксимации и разнообразные типы весовых интерполяций.
Широкое распространение имеет метод оптимальной интерполяции в
различных вариантах, что связано с относительной простотой алгоритмов и
сохранением анизотропии из исходной выборки данных. Он позволяет оптимально использовать статистические характеристики полей волн при минимальной ошибке (в среднеквадратическом смысле). Однако применение оптимальной интерполяции в определении характеристик отраженного сигнала
судовой РЛС ограничивается необходимостью использования некоторой априорной информации.
Рисунок 2.6 – Наложение данных радиолокационного зондирования (заполненные окружности) на сетку равномерных наблюдений (знак +)
72
Так, алгоритмы оптимальной интерполяции требуют задания корреляционной функции как функции расстояний между узлами (интервалов времени), радиуса влияющих пикселей, норм полей, а для этого необходимо большое количество данных. Поэтому в работе предлагаются алгоритмы и программы оптимальной интерполяции, которые отличаются от известных процедурами получения надежных оценок эмпирической корреляционной функции, ее устойчивой аппроксимацией и необходимостью использования параметров алгоритма оптимальной интерполяции (погрешность данных, радиус
корреляционных функций) по исходной выборке данных [34, 44].
Методика оптимальной интерполяции, описанная в [34], основана на
восстановлении значений анализируемых секторов путем решения системы
уравнений:
n
f 0′ = ∑ a i f i′
,
(2.31)
i =1
n
∑ µ′ a
j =1
где –
fi '
ij
j
отклонения от нормы
+ η 2 a i = µ 0′ i , (i=1,2,...,n),
fi ,
(2.32)
попавших в круг пространственной корре-
ляции точки i = 0, где восстанавливается значение поля;
ai – весовые множители, являющиеся решением системы n линейных
алгебраических уравнений;
η2 – мера ошибки измерений;
µ`ij и µ`0i – коэффициенты корреляционной функции между секторами
внутри зоны корреляции и между узлом равномерной сетки.
Для качественной интерполяции значений в узлы равномерной сетки
район исходных данных разбивается на отдельные участки – окна расчета
корреляционной функции. Размер окон выбирается таким образом, чтобы
обеспечить учет особенностей интерполируемого поля в различных участках
и достаточное количество исходных данных для получения достоверной корреляционной функции. На расстоянии полурадиуса корреляции от границ ин-
73
терполируемого района генерируется поле узлов равномерной сетки, в которые интерполируются значения параметра.
Для уменьшения искажений возможно использование процедуры, которая уменьшает радиус влияющих пикселей на тех участках расчета корреляционных функций, где плотность данных высока, и увеличивает там, где исходные данные имеют промежутки по полосам сканирования или разреженную структуру.
Однако работать с самими корреляционными функциями для анализа
пространственных структур крайне затруднительно, поскольку для хранения
требуются большие объемы информации, а их наглядное представление не
всегда удобно. В работе предлагается использовать вместо полных корреляционных функций эллипсы, построенные по уровню ½ коэффициента детерминации двумерных корреляционных функций (рисунок 2.7).
Такой уровень был выбран из условия количества обрабатываемых
значений, т. е. области, в пределах которой переменная уменьшается менее
чем в 1/√2 раз по сравнению с максимальным значением и ослабление оцениваемого параметра не превышает заданной величины. Этот уровень приблизительно соответствует 3 дБ [18, 37, 51].
Рисунок 2.7 – Пример эллипса от нормированной корреляционной функции по уровню ½ коэффициента детерминации двумерных
корреляционных функций
74
Для построения эллипсов корреляционных функций достаточно знания
формы корреляционной функции от максимума до уровня 0,3, т. к. при уровне ниже 0,3 могут наблюдаться колебания корреляционной функции около
выбранного уровня, что приводит к ошибкам метода.
Пример распределения и статистические характеристики эллипсов корреляционных функций при сканировании морской поверхности с помощью
РЛС позволяют построить поле распределения морских волн вокруг РЛС,
т. к. направление фронта морских волн напрямую влияет на степень анизотропии поля.
Описанный в работе алгоритм отличается от других алгоритмов оптимальной интерполяции тем, что позволяет получить оценки характеристик
статистической структуры (корреляционную и структурную функции) и параметры оптимальной интерполяции (радиус влияющих данных) по исходному набору данных наблюдений, которые необходимо интерполировать.
Выводы.
1. Реализация метода оптимальной интерполяции данных на сетку равномерных наблюдений необходима для дальнейших расчетов параметров
морского волнения в системах математической обработки.
2. Использование алгоритмов оптимальной интерполяции позволяет
получить оценки характеристик структуры поля с сохранением свойств анизотропии.
2.5. Выводы по второй главе
1. Для небольших судов информация о морском волнении более актуальна, т. к. для них более вероятно попадание в область наиболее неблагоприятных, а также опасных для судна волн (λ/L = 0,7÷1,3).
2. Эффективная площадь рассеяния поверхности, обладающей сложной
шероховатостью, определяется характеристиками отражения сигнала и параметрами шероховатости.
75
3. С изменением шероховатости морской поверхности меняются характеристики зеркальных точек. Это в свою очередь позволяет рассчитать высоту морского волнения по уровню сигнала, отраженного в сторону РЛС от моря.
4. По характеристикам спада двумерных корреляционных функций в
работе предлагается определять направление фронта распространения морского волнения, т. к. корреляционные функции достоверно определяют анизотропию поля.
5. Применение методов спектрального анализа возможно использовать
для определения периода морского волнения.
6. Реализация метода оптимальной интерполяции данных на сетку равномерных наблюдений необходима для дальнейших расчетов параметров
морского волнения в системах математической обработки.
7. Использование алгоритмов оптимальной интерполяции позволяет
получить оценки характеристик структуры с сохранением анизотропии поля
при указанных граничных условиях.
8. Контролируя основные параметры волнения, с помощью несложных
формул можно определять опасные изменения глубины вокруг судна. При
этом кроме РЛС не требуется использования иного судового навигационного
оборудования.
9. Для дальнейшей обработки и анализа принимаемых сигналов необходима реализация предлагаемого в работе способа в виде устройства для
измерения характеристик поверхностного волнения, подготовка соответствующих алгоритмов и программ обработки.
76
Глава 3. Разработка способа определения параметров
морской поверхности с помощью информации, получаемой
от судовой радиолокационной станции
3.1. Выбор средства обработки радиолокационной информации
При исследовании сигналов, принимаемых от РЛС, одним из важных
аспектов является правильный подбор подходящего устройства аналогоцифрового преобразования.
Все многообразие АЦП можно разделить на группы, объединенные
общими технологией, схемотехникой и методом преобразования, близкими
точностными, динамическими или эксплуатационными параметрами, причем
эти группы могут пересекаться, т. е. иметь общие элементы.
На рисунке 3.1 приведена схема цифровой обработки сигналов РЛС
аппаратными средствами.
Рисунок 3.1 – Структурная схема цифровой обработки непрерывных
сигналов: а) судовая РЛС; б) устройство АЦП; в) персональный компьютер
При выборе АЦП необходимо учитывать основные параметры, которые определяют назначение и область его применения, а также возможность
его использования с различным оборудованием.
77
Статические параметры, характеризующие АЦП, являются основными
критериями при выборе устройства. Можно выделить следующие статистические характеристики АЦП.
Разрешающая способность – величина, обратная максимальному числу
кодовых комбинаций на выходе АЦП. Разрешающая способность выражается в процентах, разрядах или децибелах и характеризует потенциальные возможности
АЦП
с
точки
зрения
достижимой
точности.
Например,
12-разрядный АЦП имеет разрешающую способность 1/4096, или 0,0245 %
от полной шкалы, или 72,2 дБ.
Разрешающей способности соответствует приращение входного напряжения АЦП Uвх при изменении сигнала на единицу младшего запоминающего разряда (МЗР). Это приращение является шагом квантования. Для
двоичных кодов преобразования номинальное значение шага квантования
h = Uпш/(2N–1), где Uпш – номинальное максимальное входное напряжение
АЦП (напряжение полной шкалы), соответствующее максимальному значению выходного кода; N – разрядность АЦП. Чем больше разрядность преобразователя, тем выше его разрешающая способность [106].
Интерфейс – совокупность средств и правил, обеспечивающих взаимодействие устройств вычислительной системы и программ, а также взаимодействие их с человеком, т. е. форма для общения между средствами ввода и
программными средствами машины, разъём для соединения двух устройств
[39].
Поток данных интерфейса для судового оборудования должен соответствовать Международному стандарту МЭК 61162, разработанному Международной электротехнической комиссией (International Electrotechnical Commission). По этому стандарту передача и прием данных интерфейса производится со скоростью 4800 бит/с, каждый символ передается кодом ASCII
(American Standard Code for Information Interchange). Код символа состоит из
8 бит. Данные передаются и принимаются в виде предложений интерфейса ,
максимальное число символов в предложении – 82 [13].
78
Разрядность АЦП – характеризует количество дискретных значений,
которые преобразователь может выдать на выходе. В двоичных АЦП разрядность измеряется в битах, в троичных АЦП в тритах. Например, двоичный
8-разрядный АЦП, способен выдать 256 дискретных значений (0…255), поскольку 28 = 256, троичный 8-ми разрядный АЦП, способен выдать 6561 дискретное значение, поскольку 38 = 6561.
Буферная память – область памяти с быстрым доступом, содержащая
копию той информации, которая хранится в оперативной памяти с менее быстрым доступом, но с наибольшей вероятностью может быть оттуда запрошена. Доступ к данным идёт быстрее, чем выборка исходных данных из медленной памяти или их перевычисление, за счёт чего уменьшается среднее
время доступа [54].
Возникновение динамических погрешностей в АЦП связано с дискретизацией сигналов, изменяющихся во времени. Можно выделить следующие
параметры АЦП, определяющие его динамическую точность.
Максимальная частота дискретизации (преобразования) – это наибольшая частота, с которой происходит образование выборочных значений сигнала, при которой выбранный параметр АЦП не выходит за заданные пределы. Измеряется числом выборок в секунду. Выбранным параметром может
быть, например, монотонность характеристики преобразования или погрешность линейности.
Диапазон входного напряжения – максимальное значение напряженности электрической составляющей электромагнитного поля на входе АЦП.
Время преобразования (tпр) – время, отсчитываемое от начала импульса
дискретизации или начала преобразования до появления на выходе устойчивого кода, соответствующего данной выборке. Для одних АЦП, например
последовательного счета или многотактного интегрирования, эта величина
является переменной, зависящей от значения входного сигнала, для других,
таких как параллельные или последовательно-параллельные АЦП, а также
АЦП последовательного приближения, примерно постоянной.
79
Время выборки (стробирования) – время, в течение которого происходит образование одного выборочного значения [93].
В таблице 3.1 приведены сравнительные характеристики некоторых
типов аналого-цифровых преобразователей и систем сбора данных, используемых для анализа различных сигналов [33, 45, 46, 55, 78].
Из таблицы 3.1 видно, что основополагающими параметрами, влияющими на стоимость устройства АЦП, являются частота дискретизации и разрядность.
При обработке радиолокационной информации АЦП должен обеспечивать возможность получения достаточной информации об окружающей обстановке в принятом сигнале.
Разрешающая способность АЦП по дальности оценивается по формуле
[16]
∆D разр =
с
2 f дискр
,
(3.1)
где с – скорость света;
f дискр – частота дискретизации.
Тогда минимальная частота дискретизации для разрешения не более
3 метров, составит:
f дискр =
c
= 50 МГц .
2∆D разр
(3.2)
Согласно выражению (3.2) частота дискретизации АЦП требуется не
менее 50 МГц.
Для точного определения вероятностных характеристик при обработке
принимаемых сигналов РЛС рекомендуемая глубина оцифровки (разрядность) 10–12 бит.
В зависимости от типа и параметров вычислительного устройства, на
котором производится анализ измерений, плата АЦП может быть PCI или
USB [65].
80
81
Рисунок 3.2 – Плата аналогово-цифрового преобразования
Ла-н20-12PCI
Полученную с помощью плат АЦП информацию можно анализировать
в таких системах обработки, как Matlab, Mathcad и др. Результат такой обработки можно представить как в цифровом, так и в графическом виде [12,
85, 86].
Проведенный анализ показывает, что при выборе АЦП основным параметром является частота дискретизации и возможность внешней синхронизации. При частоте дискретизации 50 МГц разрешающая способность по
дистанции составляет 3 метра. Для синхронизации устройства АЦП с РЛС
необходимо изучение используемой станции, для подключения устройства
АЦП к выходу приемника, датчика импульсов начала отсчета курсового угла
антенны, и выходу импульсов синхронизации передатчика [120].
3.2. Методы цифровой обработки сигнала радиолокационной станции
В настоящее время широко используются методы обработки радиотехнических сигналов с помощью микроэлектронных вычислительных уст-
82
ройств и систем. Наиболее изученный и внедренный класс систем дискретной обработки сигналов – так называемые линейные стационарные цифровые
фильтры. Выполняя, подобно аналоговым цепям, операцию частотной
фильтрации, цифровые фильтры (ЦФ) обладают рядом существенных преимуществ. К ним относятся высокая стабильность параметров и возможность
получать самые разнообразные формы амплитудочастотных и фазочастотных
характеристик. Цифровые фильтры не требуют настройки и легко реализуются в электронно-вычислительных машинах программными методами. На
рисунке 3.3 приведена основная структурная схема цифровой обработки сигналов [19].
Рисунок 3.3 – Структурная схема цифровой обработки
непрерывных сигналов
В цифровых РЛС видеосигнал с выхода приемника подается на аналого-цифровой преобразователь для обработки в сигнальном (цифровом) процессоре. На сигнальный процессор поступает также информация о текущем
угле поворота антенны и реперные импульсы о нулевом положении антенны,
когда антенна перпендикулярна диаметральной плоскости судна и направлена по курсовому углу. В результате цифровой первичной обработки в памяти
83
процессора формируется массив данных, позволяющий получить на экране
индикатора кругового обзора (ИКО) радиолокационное изображение как за
один, так и за несколько оборотов антенны.
При цифровой обработке аналоговый сигнал на выходе видеоусилителя
приемника заменяется последовательностью выборок в дискретном ряде точек базовой шкалы времени. Каждая выборка преобразуется в цифровой код
[29, 47].
Для однозначного представления сигнала в соответствии с теоремой
Котельникова необходимо, чтобы последовательность выборок отстояла друг
от друга на интервал
t0 ≤
1
,
2∆f c
(3.3)
где ∆fc – ширина частотного спектра сигнала на выходе детектора.
Операция квантования взятых выборок по амплитуде обычно производится с помощью аналого-цифровых преобразователей.
В случае использования 8-разрядного преобразователя сигнал квантуется по амплитуде так, чтобы цена младшего разряда не превышала среднеквадратичной величины шума σN. Применение 8-битовых преобразователей
«аналог – цифра» приводит к необходимости использования больших объемов памяти по сравнению с бинарным преобразователем, однако при многоуровневом преобразовании представление аналогового сигнала в цифровом
виде является более точным. При бинарном квантовании порог квантования
выбирается на уровне 1,785σN. В реальных условиях работы величина σN неизвестна. Поэтому расчет производится исходя из наихудшего ожидаемого
уровня шума.
Аналоговый сигнал на выходе видеоусилителя (рисунок 3.4а) с помощью предельного ограничителя преобразуется в двухуровневое напряжение
U1,0 (рисунок 3.4б). На выходе предельного ограничителя любое напряжение,
превышающее пороговый уровень Uпор, представляется в виде постоянной
величины. Последовательность стробирующих импульсов (рисунок 3.4в)
84
формирует последовательность единиц нулей (рисунок 3.4г), причем нуль
формируется, если напряжение Uдет ниже порогового уровня Uпор, а единица,
если превышает этот уровень.
Рисунок 3.4 – Случай бинарного преобразования в цифровой код
Для представления в цифровом виде радиолокационного изображения
в пределах шкалы дальности на данном азимуте при бинарном квантовании
сигнала необходима информационная емкость Nсл = 1024 бита, а при
8-битовом квантовании – N'сл =1024·8 = 8192 бита. Информационную емкость
для представления радиолокационного изображения на радиусе обзора принято называть «словом дальности». При такой терминологии «слово дальности» при бинарном квантовании содержит 1024 бита.
85
Измерение угла поворота антенны РЛС производится с помощью
12-битного преобразователя «угол – код», «слово азимута» Nаз = 12 бит. Число уровней квантования N = 212 = 4096 бит. Дискрет измеряемого азимута
∆ аз =
360
= 0,088° ≈ 0,1° .
4096
(3.4)
Информационная емкость «слов дальности и азимута» для представления информационного изображения за один оборот антенны в случае бинарного квантования сигнала (рисунок 3.5) содержит
Nоб = Nсл · N + Nаз · N = N (Nсл + Nаз) бит.
(3.5)
В случае 8-битового квантования сигнала информационная емкость,
необходимая для представления радиолокационного изображения за один
оборот антенны,
N'об = 8 · Nсл · N + Nаз · N = N (8 · Nсл + Nаз) бит.
Для рассматриваемого примера
Nоб = 4096 · (1024 + 12) = 4 245 528 бит,
N'об = 4096 · (8 · 1024 +12) = 33 603 584 бит.
Соответственно, необходимые объемы памяти
Vоб = Nоб / 1024 = 4146 Кбайт ≈ 4,2 Мбайт,
V'об = N'об / 1024 = 33 816 Кбайт ≈ 34 Мбайт.
При угловой скорости вращения антенны 24 об/мин время одного оборота равно 2,5 с.
Информация радиолокационного изображения по результатам внутриимпульсной обработки определена в 4096 строках (рисунок 3.5). С целью
увеличения помехозащищенности дополнительно используется межимпульсная и межобзорная фильтрация программными методами [84].
86
Рисунок 3.5 – Информационная емкость слов дальности и азимута в
случае бинарного квантования сигнала
В рассматриваемом примере при частоте следования зондирующих импульсов F = 1000 Гц, при угловой скорости антенны Uа = 24 об/мин, при ширине диаграммы направленности антенны в горизонтальной плоскости
αг = 1,8° в пачке содержится N = 13 отраженных от точечной цели импульсов.
В течение одного периода следования стробирующих импульсов T = 0,001 с
антенна сделает поворот на 0,144°. За время длительности пачки из 13 импульсов поворот антенны равен 0,144·13 = 1,87°.
Каждая строка отличается от предыдущей строки по угловому положению антенны на 0,1°. Следовательно, число скользящих строк
1,87
≈ 19 . Ме0,1
тодом скользящей оценки на каждом дискрете дальности последовательно
анализируются 0 … 18, 1 … 19, 2 … 20 и т. д. группы строк. Результатами
оценки для данного дискрета дальности является наличие или отсутствие цели (1 или 0), которые записываются соответственно в 18, 19, 20, и т. д. строки.
87
Методика межимпульсной фильтрации при многоуровневом квантовании та же, с той разницей, что на каждом дискрете дальности оценке подлежит 8-битовая кодовая последовательность. При межобзорной фильтрации на
всех дискретах дальности определяются результаты, записанные в соответствующих строках за несколько поворотов антенны [13, 117, 144].
Новые требования, предъявляемые к РЛС, привели к разработке совершенно новой техники, новых принципов радиолокации. В настоящее время на современных РЛС импульс, посылаемый станцией, представляет собой
сигнал, закодированный по весьма сложному алгоритму, позволяющий получать данные повышенной точности и ряд дополнительных сведений о наблюдаемой цели. Развитие вычислительной техники и элементной базы приводит к тому, что мощные мегаваттные передатчики уходят в прошлое. На
смену им приходят сложные системы РЛС средней мощности, объединенные
посредством компьютера в навигационные комплексы. Благодаря внедрению
информационных технологий стала возможна синхронная автоматическая
работа нескольких РЛС. Радиолокационные комплексы постоянно совершенствуются, находя новые сферы применения [2, 114].
В результате проведенного исследования можно сделать вывод, что на
основании схемы построения судовой РЛС возможна реализация предлагаемого в работе алгоритма без подключения внешнего устройства АЦП с выводом информации сразу на ПК. Используя разрабатываемый в работе способ,
можно создать новые типы судовых РЛС, отражающих параметры морского
волнения на экране станции.
3.3. Синхронизация РЛС с внешними средствами обработки
Сигналы с видеоусилителя поступают в аналоговой форме, а кодирование и вывод их в сигнальный процессор или вычислительную машину требуют дискретной формы представления [41].
88
Для получения исходной информации в работе использовалась судовая
РЛС JMA-2044, основные параметры которой приведены в таблице 3.2 [70,
104].
Таблица 3.2 – Технические и навигационные характеристики РЛС JMA-2044
Максимальная дальность
32 мили
Минимальная дальность
не более 32 метров
Точность определения расстояния
не хуже 22 метров
Напряжение питания
11 – 43 В пост. тока
Поляризация радиоволны
горизонтальна
Ширина диаграммы направленности антенны:
Горизонтальная
2,4 град
Вертикальная
30 град
Частота вращения антенны
24 об/мин
Несущая частота
9445 мГц
Импульсная мощность
4 кВт
Длительность зондирующих импульсов
0,12; 0,5 мкс
Частота зондирующих импульсов
820 имп./с
Промежуточная частота
60 мГц
Точность определения расстояния 22 метра обусловлена размером пикселя на экране РЛС [4]. Регулировка малой постоянной времени позволяет
достигнуть инструментального разрешения по дальности 3 метра [41].
Для дальнейшего анализа аналогового сигнала станции использовалась
плата аналого-цифрового преобразования Ла-н20-12PCI. Плата предназначена для работы в составе персонального компьютера (ПК) типа IBM PC/AT.
Основное назначение платы – преобразование непрерывных (аналоговых)
входных сигналов в цифровую форму, которая удобна для дальнейшей обработки сигнала при помощи ПК [87]. Технические характеристики устройства
приведены в таблице 3.3.
89
Таблица 3.3 – Технические данные АЦП Ла-н20-12PCI
Число аналоговых входов
2 синхронных (два канала АЦП)
Конфигурация аналоговых входов
однополюсные
Входное сопротивление (Импеданс)
50 Ом
Разъем
BNC
Входная полоса частот аналогового
40 МГц
канала
Диапазоны входного напряжения
±2 В, ±1 В; ±0,4 В; ±0,2 В
Защита по напряжению аналоговых
±7,5 В
входов
Объем буфера памяти
256 кСлов
Передача данных АЦП
по прерываниям; программный обмен
Тип АЦП
последовательно-параллельный
Разрешение
12 бит
Максимальная частота дискретизации
50 МГц
Запуск АЦП
от внутреннего кварцевого генератора,
от внешней тактовой частоты
Внешняя тактовая частота
ТТЛ-совместимый
сигнал,
меандр.
Период должен находится в диапазоне
0,2 мкс ≤ T ≤ 20 нc
Защита по напряжению входа внеш±5 В
ней тактовой частоты
Источник синхронизации
канал 0, канал 1 или внешний
Тип синхронизации
по фронту или по спаду уровня напряжения сигнала канала 0, 1 или внешней
синхронизации
Внешний сигнал синхронизации
аналоговый, в диапазоне ±5 В
Тип входа синхронизации
открытый/закрытый
Число уровней порога синхронизации
256
Для того чтобы подключить АЦП Ла-н20-12PCI к РЛС JMA-2044, на
станции были скоммутированы дополнительные выходы (рисунок 3.6). Сигнал с выхода видеоусилителя (Xt1) приемника подается на вход одного из
90
аналоговых каналов платы (Xp4). Диапазон входного напряжения ограничен
±2 В. С выхода модулятора станции (Xt4) на вход внешней синхронизации
(Xp1) поступает синхроимпульс в диапазоне ±5 В. Динамический диапазон
входного напряжения схемы синхронизации разбит на 256 уровней. При совпадении заданного пользователем платы уровня напряжения синхронизации
и напряжения входного сигнала аналогового канала вырабатывается импульс
синхронизации, который производит пуск преобразования. С кодирующего
механизма антенно-волнового тракта (Xt3) на вход синхронных цифровых
данных (Xp5) подаются импульсы синхронизации курсового угла (КУ) антенны.
Рисунок 3.6 – Схема коммутации судовой РЛС JMA-2044
и платы АЦП Ла-н20-12PCI
Описание входов/выходов РЛС JMA-2044:
Xt1 – видеосигнал с выхода приемника;
Xt2 – кванты кругового угла антенны;
91
Xt3 – начало отсчета курсового угла антенны;
Xt4 – импульс синхронизации.
Описание входов/выходов АЦП Ла-н20-12PCI:
Xp1 – вход внешней синхронизации;
Xp2 – вход внешней тактовой частоты;
Xp3 – вход аналогового канала 1;
Xp4 – вход аналогового канала 0;
Xp5 – вход синхронных цифровых данных.
Видеосигналы радиолокационных импульсов, поступающих с выхода
видеоусилителя приемника, квантуются по бинарному принципу, т. е. на выходе образуется сигнал «1» (единичной) амплитуды в случае превышения
входного сигнала АЦП установленного порогового квантования, в обратном
случае на выходе АЦП вырабатывается «0» (нулевой) амплитуды.
После прихода команды преобразования данные с АЦП циклически
(непрерывно) записываются в выбранную часть внутреннего оперативного
запоминающего устройства (ОЗУ), которая именуется «предыстория». Циклическое внутреннее ОЗУ содержит 128 кСлов на канал. Объем используемого ОЗУ может быть программно уменьшен до 1 кСлова с шагом 2n , где n = 1,
2, …, например 128, 64, 32, 16, 8, 4, 2, 1 кСлов. Пока выбранный объем предыстории не заполнен синхроимпульсы блокируются и не обрабатываются.
По заполнении предыстории и приходе импульса синхронизации записывается часть ОЗУ за вычетом объема «предыстории». Эта часть ОЗУ называется
«историей».
Использование стандартного программного обеспечения производителя устройства АЦП позволяет наблюдать форму сигнала на входе устройства.
В ходе практической реализации схемы синхронизации РЛС JMA–2044 и
платы АЦП Ла-н20-12PCI [79] была создана экспериментальная установка по
изучению сигналов РЛС (рисунок 3.7).
92
Рисунок 3.7 – Экспериментальная установка по изучению принятых
сигналов РЛС
После преобразования входного аналогового сигнала судовой РЛС в
цифровые значения появляется возможность его дальнейшего анализа. Данные аналогового канала отправлялись для дальнейшей обработки на вычислительные устройства. Для проведения необходимых расчетов в системах
математической обработки MATLAB, Mathcad и похожих программах данные из внутренней памяти АЦП необходимо передать в память компьютера
[105, 115].
В результате проделанной работы были определены параметры АЦП,
необходимого для обработки сигнала РЛС, и реализована схема синхронизации, что является решением поставленной в разделе 3.1 технической задачи.
Для дальнейшей обработки и анализа принимаемых РЛС сигналов необходима реализация предлагаемого в работе способа в виде устройства для измерения характеристик поверхностного волнения и подготовка соответствующих алгоритмов и программ обработки.
3.4. Обработка результатов измерений
Анализ данных с каждого оборота антенны осуществлялся специально
разработанной программой.
Обработка осуществлялась в три параллельных потока. Первый поток
осуществлял первичное преобразование принятого сигнала. По фронту зон-
93
дирующего сигнала РЛС программа переключала плату в режим синхронизации. В данном режиме плата начинала запись в буфер памяти. При заполнении выделенного буфера драйвер платы копировал данные из буфера памяти платы в оперативную память компьютера и передавал управление подпрограмме обработки. При максимальной частоте синхронизации программа
позволяла оцифровать сектор радиусом 1,1 мили, обеспечивающий получение поля данных с радиальным разрешением не менее 6,4 метров и 3-х метров по дистанции.
Далее осуществлялось декодирование данных: для каждого измерения
плата передавала 4 байта данных, содержащих значения для первого и второго аналоговых входов и значение цифрового входа платы. Значение цифрового порта располагалось в 4 младших битах первого и третьего байта, а значения аналоговых входов – в оставшихся битах первого и второго байта для
первого входа и в оставшихся битах третьего и четвертого байта для второго
входа.
Значения указанного в настройках программы аналогового входа размещались в массиве типа «short», содержащего последовательно все измерения одного зондирующего импульса. При завершении обработки всех значений импульса указатель на этот массив добавлялся в вектор данных текущего
оборота антенны РЛС. На рисунке 3.8 приведен пример пяти последовательных импульсов РЛС [88].
При обнаружении значения «11» в данных цифрового порта, означающего начало нового оборота антенны РЛС, программа передавала вектор с
указателями второму потоку для дальнейшей обработки данных со всего
оборота РЛС и инициализировала новый пустой вектор.
94
Рисунок 3.8 – Пример отображения пяти последовательных
импульсов РЛС
На рисунке 3.9 представлен алгоритм подготовки данных для обработки.
Обработка осуществлялась в три параллельных потока. Первый поток
осуществлял первичное преобразование принятого сигнала. Второй поток
осуществлял преобразование сохраненных данных в декартову систему координат, где за ноль была взята точка нулевого положения антенны РЛС и
сохранение данных на жестком диске в текстовом формате.
Каждая точка описывалась на отдельной строке тремя числами – координатой по оси Х в метрах, координатой по оси Y в метрах и значением сигнала в этой точке. Числа записывались в символьном виде и разделялись
символом табуляции.
95
Рисунок 3.9 – Алгоритм программы обработки данных РЛС
зондирования
96
Третий поток отвечал за визуализацию результатов и присвоение параметров переменным. Для оценки информации, принятой за полный оборот
антенны, в программе был разработан режим, элементы которого представлены на рисунке 3.8. В левой части отображается график принятых зондирующих импульсов. В правой части находятся элементы управления с полями редактирования, раскрывающимися списками и списками выбора параметров работы программы.
В
дальнейшем
обработка
осуществлялась
в
системе
научно-
технических расчетов MATLAB [12, 56, 85]. Данные интерполировались
в равномерную сетку. Формирование узлов двумерной сетки осуществлялось
с помощью команды [X, Y] = meshgrid(x, y). Функция [X, Y] = meshgrid(x, y)
формирует массивы X и Y, которые определяют координаты узлов прямоугольника, задаваемого векторами x и y. Значения уровня сигнала АЦП интерполировались в узлы равномерной сетки с помощью метода оптимальной
интерполяции, описанного в разделе 2.4.
Далее осуществлялся выбор значений сигнала АЦП по площади кольца. За центр кольца принималось положение антенны судовой РЛС, большой,
RH, и малый, RL, радиусы кольца выбирались в зависимости от характеристик
РЛС и высоты установки антенны. Для выбора использовалась функция
inpoligon, которая для множества точек [X, Y] и многоугольника, заданного
своими вершинами, имеет размеры size(X), а каждый ее элемент равен 1, если соответствующая точка из [X, Y] лежит строго внутри многоугольника,
равен 0,5, если она попала на границу, и равен 0, если точка оказалась вне его
(рисунок 3.10).
Определение высоты морского волнения предложено рассчитывать по
плотности количества предельных значений АЦП (Nпред) на единицу площади, обозначенную как ρпред.
Для формирования массива данных, содержащего значения сигнала
АЦП, функция inpoligon использовалась дважды. При первом расчете многоугольник задавался окружностью с радиусом RH и выбирались точки внутри
97
заданной фигуры. Затем многоугольник задавался окружностью радиусом RL
и выбирались точки вне него. В полученном массиве осуществлялся подсчет
количества элементов, соответствующих уровню максимума из возможных
отсчетов АЦП. Полученное количество элементов делилось на площадь.
Рисунок 3.10 – Принцип работы функции inpoligon
Расчет высоты волн осуществлялся по формуле (2.17). Для определения
значений σh в формуле (2.16) в качестве значения мощности отраженного от
поверхности моря сигнала использовалась величина ρпред. В качестве мощности передатчика использовалась величина
ρзерк,
представляющая макси-
мально возможную плотность количества предельных значений АЦП на единицу площади при зеркальном отражении с учетом затухания сигнала в пространстве.
Графически алгоритм определения высоты морского волнения вокруг
судна приведен на рисунке 3.11.
Для определения генерального направления распространения фронта
морского волнения (рисунок 3.12, 3.13) из данных радиолокационного зондирования выбирались отдельные сектора, равноудаленные от судовой РЛС
98
во всех азимутальных направлениях в отдельные массивы с помощью функции find. Функция find дает поиск по условию элементов одно- или двухмерного массива в формате команд k = find (X<условие>). В полученных массивах проводился расчет корреляционных функций.
Расчет уровней корреляции внутри корреляционных функций велся в
скользящих перекрывающихся окнах по широте и долготе.
Рисунок 3.11 – Алгоритм определения высоты морского волнения
Следует учесть, что специфика корреляционной функции как второго
статистического момента требует для их оценок достаточного числа данных
в градации расстояния. Для предотвращения потери количества данных на
краю исследуемого района в результате процедуры интерполяции, в программе координаты района автоматически расширялись на 5 % с каждой стороны.
99
100
Рисунок 3.13 – Алгоритм определения генерального направления распространения фронта морского волнения (окончание)
После этого задавался диапазон расчета корреляционной функции. Диапазон
ограничивался выше ¼ нижних координат района и заканчивался расчет коэффициентов корреляции на ¾ верхнего предела координат района. Расчет проводился
в скользящем окне размером ¼ района со смешением последовательно по обеим
координатам через 3 метра (рисунок 2.1).
Следующим этапом определялось положение точек на уровне ½ коэффициента детерминации двумерной корреляционной функции [75]. По полученным
данным строился корреляционный эллипс, и определялась длина его большой
оси.
101
Положение сектора, в котором длина большой оси корреляционного эллипса
наименьшая, указывает на направление распространения фронта морского волнения.
Частоту морского волнения предложено находить из функции спектральной
мощности волнения. По направлению распространения фронта морского волнения, с помощью функции inpoligon выбирались данные в прямоугольном секторе,
ширина которого определялась шириной диаграммы направленности антенны
РЛС в горизонтальной плоскости, а длина определялась чувствительностью АЦП
и высотой установки антенны.
На рисунке 3.14 представлен алгоритм определения частоты морского волнения.
Рисунок 3.14 – Алгоритм определения частоты морского волнения
102
Выбранные данные сортировались по дистанции, и ближайшее к судну значение принималось за начало отсчета. С помощью команды n = nextpow2(a) вычислялось минимальное значение n, соответствующее 2^n > |a|. В работе параметр
а – длина массива, полученная в результате выборки данных. Параметр n необходим для ускорения работы функции Y = fft (X, n). Функция fft выполняет быстрое
одномерное преобразование Фурье по формуле (2.25).
В результате проделанной работы предложены алгоритмы, позволяющие
надежно определять основные компоненты морского волнения. Практическая
реализация и проверка разработанных алгоритмов будет представлена в последующих пунктах.
3.5. Практическая реализация радиолокационного волномера
Практическая реализация разрабатываемого в работе способа была оформлена в форме изобретения «Устройство для определения состояния морской поверхности» (приложение А). Реализованная в устройстве процедура позволяет с
помощью аналого-цифрового преобразования и специально разработанной программы экспериментально определять высоту и направление распространения
фронта морского волнения способом статистической обработки информации, поступающей от судовой радиолокационной станции. Устройство [81] послужило
прототипом в создании изобретения [48].
Изобретение относится к области измерительной техники, к оборудованию,
обеспечивающему безопасность мореплавания по средствам анализа состояния
взволнованной морской поверхности.
Поставленная в первой главе техническая задача по устранению недостатков в устройстве, принятом за прототип, достигается тем, что в известном устройстве для определения состояния морской поверхности, содержащем радиолокационную станцию, включающую антенну, синхронизатор, датчик углового положения антенны (блок углового положения антенны), который соединен механической связью с основанием антенны, электронный ключ (антенный переключа-
103
тель), индикатор, а также приемник и передатчик. При этом выход синхронизатора соединен со входом передатчика, а выход передатчика соединен со входом
электронного ключа (антенного переключателя), в отличие от него в разработанном устройстве дополнительно содержатся аналого-цифровой преобразователь и
соединенное с ним на выходе вычислительное устройство. Передатчик радиолокационной станции дополнительно содержит модулятор и генератор сверхвысокой частоты, вход которого соединен с выходом модулятора; при этом второй выход синхронизатора соединен со входом индикатора, упомянутый первый выход
синхронизатора соединен со входом модулятора передатчика, а его генератор
сверхвысокой частоты соединен на выходе со входом электронного ключа (антенного переключателя), выход которого соединен со входом приемника, а выход
приемника соединен со вторым входом индикатора, второй выход приемника соединен со входом аналогового канала аналого-цифрового преобразователя, второй
вход которого – вход синхронных цифровых данных – соединен с выходом датчика углового положения антенны (блока углового положения антенны), второй
выход которого соединен с третьим входом индикатора, а третий вход аналогоцифрового преобразователя – вход внешней синхронизации – соединен с третьим
выходом синхронизатора, а антенна электрически связана с электронным ключом.
Находящееся в его составе вычислительное устройство выполнено в виде персонального компьютера.
Совокупность отличительных и ограничительных признаков разработанного устройства, выражающаяся в установке дополнительно аналого-цифрового
преобразователя и вычислительного устройства, являющихся серийными, и в совокупности с их связями обеспечивает достижение поставленной технической задачи следующим путем. Каждый аналоговый видеоимпульс со второго выхода
приемника РЛС поступает на первый вход аналого-цифрового преобразователя, в
котором преобразуется в цифровую форму. С учетом данных, поступающих с
первого выхода блока углового положения антенны на второй вход – вход синхронных цифровых данных устройства аналого-цифрового преобразования,
оцифрованные значения видеоимпульсов полного оборота антенны записываются
104
в массив данных вычислительного устройства с соответствующим значением положения угла антенны. Размер данного массива обусловлен объемом встроенной
памяти конкретного вычислительного устройства, в частности персонального
компьютера. Для выявления структуры полей волн морской поверхности анализ
накопленных в нем данных с помощью специального программного обеспечения
производится на основе расчета двумерной корреляционной функции.
Расчет данной двумерной корреляционной функции происходит для выбранного сектора, для примера сектор может быть длиной от 250 до 350 м удаления от антенны РЛС и шириной 5°. Каждый последующий расчет происходит при
очередном смещении сектора на 2,5° по всей окружности. Сравнение значений
двумерной корреляционной функции происходит в вычислительном устройстве
по уровню ½ коэффициента детерминации. Двумерная корреляционная функция,
ширина которой на уровне ½ коэффициента детерминации будет наибольшая за
полный оборот антенны, соответствует направлению фронта волны с достаточной
точностью ±2.5°, т. к. чем выше интенсивность морского волнения, тем больше
эффективная поверхность рассеяния фронта волны при зондировании. За счет
этого уровень принимаемого сигнала выше и, соответственно, выше энергия видеоимпульса.
После сравнения данных за несколько полных оборотов антенны на индикаторе вычислительного устройства автоматически проецируется с достаточной
точностью значение состояния морского волнения. За счет этого повышается точность определения параметров. Процесс анализа, необходимая корректировка
расчетных коэффициентов программного продукта при возможном изменении настроек оборудования происходят автоматически и не требуют специальных навыков пользователя. Этим обеспечивается достижение поставленной технической
задачи – упрощение конструкции и повышение точности измерений. Дополнительным эффектом является автоматизация процесса анализа, что не требует соответствующей квалификации оператора.
На рисунке 3.15 представлена блок-схема, позволяющая реализовать устройство для определения состояния морской поверхности.
105
Устройство для определения состояния морской поверхности в своем составе содержит радиолокационную станцию 1, включающую синхронизатор 2, вырабатывающий последовательность запускающих видеоимпульсов, выход которого
соединен со входом передатчика 3, состоящего из модулятора 4 и генератора
сверхвысокой частоты 5, вход которого соединен с выходом модулятора, который
под действием синхронизирующих импульсов генерирует мощные, короткие радиоимпульсы, и его выход соединен со входом электронного ключа (антенного
переключателя) 6, приемник 7, усиливающий принятые отраженные сигналы и
преобразующий их в видеоимпульсы, вход которого соединен с выходом антенного переключателя 6, индикатор 8, первый вход которого соединен со вторым
выходом синхронизатора 2, а второй вход соединен с выходом приемника 7.
Рисунок 3.15 – Устройство для определения состояния
морской поверхности
106
Устройство также содержит входящие в РЛС антенну 9 и датчик (блок передачи данных) углового положения антенны 10, который соединен механической
связью (не показано) с основанием антенны, и дополнительно аналого-цифровой
преобразователь 11 и соединенное с ним на выходе вычислительное устройство
12. При этом второй выход приемника 7 соединен со входом аналогового канала
аналого-цифрового преобразователя 11, а выход блока передачи данных углового
положения антенны 10 соединен со вторым входом – входом синхронных цифровых данных аналого-цифрового преобразователя 11, второй выход которого соединен с третьим входом индикатора 8. Причем третий вход – вход внешней синхронизации аналого-цифрового преобразователя 11 – соединен с третьим выходом синхронизатора.
Аналого-цифровой преобразователь 11 и вычислительное устройство, например персональный компьютер 12, являются серийными устройствами, и в зависимости от типа их соединение может осуществляться через разъемы (не показано) PCI (Peripheral Component Interconnect – шина соединения периферийных
компонентов), USB (Universal Serial Bus – универсальная последовательная шина,
является промышленным стандартом расширения архитектуры ПК) и др.
В качестве примера для реализации устройства его основными элементами
могут являться радиолокационная станция «JMA-2044», устройство аналогоцифрового преобразования «Ла-н20-12PCI» и персональный компьютер с аппаратными
требованиями
не
ниже
следующих:
процессор
семейства
Intel Core2Duo/AMD Athlon AM2 – 1 Гб оперативной памяти, 10 Гб свободного
места на жестком диске, программный продукт, построенный на платформе
Win32, совместим с операционными системами Windows 98/2000/XP [115].
Устройство используют следующим образом: включают радиолокационную
станцию в работу, запускающие импульсы ее синхронизатора 2 с периодом следования или повторения Ти поступают одновременно (либо с постоянной задержкой) на вход модулятора передатчика 4 и первый вход индикатора 8. Импульсный
модулятор передатчика вырабатывает модулирующие видеоимпульсы длительностью τи, воздействующие на генератор сверхвысокой частоты 5, который генери-
107
рует радиоимпульсы длительностью, равной примерно длительности модулирующих импульсов. Радиоимпульсы генератора сверхвысокой частоты через антенный переключатель 6 поступают в антенну 9 и излучаются, выполняя функцию зондирующих сигналов. Через интервал времени tD на входе приемника 7
возникают отраженные сигналы, которые в нем усиливаются и детектируются. В
результате детектирования на первом выходе приемника создаются видеоимпульсы, которые через второй вход подаются на управляющий электрод индикатора 8.
Существенно, что второй выход приемника 7 соединен с первым входом
аналогового канала аналого-цифрового преобразователя 11 (xв –видеоимпульс),
первый выход блока передачи данных углового положения антенны 10 соединен
со вторым входом – входом синхронных цифровых данных (xн – импульс начала
отсчета курсового угла антенны), а третий выход синхронизатора 2 соединен c
третьим входом – входом внешней синхронизации преобразователя 11 (xc – импульс синхронизации).
После преобразования видеоимпульса, поступающего со второго выхода
приемника 7, с учетом данных, поступающих с первого выхода блока передачи
данных углового положения антенны 10 на второй вход синхронных цифровых
данных устройства аналого-цифрового преобразования 11 и с третьего выхода
синхронизатора 2 на третий вход внешней синхронизации преобразователя 11, с
помощью последнего в цифровую форму, данные поступают в вычислительное
устройство 12. После анализа данных за несколько полных оборотов антенны в
вычислительном устройстве 12 отображается информация о состоянии морского
волнения. Весь процесс происходит в автоматическом режиме и не требует участия пользователя. Этим достигается простота и удобство в использовании.
Испытание опытного образца устройства для определения состояния морской поверхности показало эффективность его использования при достижении
поставленных технических задач, а именно: упрощение конструктивного исполнения устройства, повышение точности измерения характеристик морского волнения, автоматизация процесса анализа.
108
3.6. Выводы по третьей главе
В результате исследований, выполненных в третьей главе, можно сделать
следующие выводы.
1. При наличии подробной схемы судовой РЛС возможна реализация предлагаемых в работе алгоритмов с выводом информации сразу на ПК.
2. Используя разрабатываемый в работе способ, возможно создание судовых РЛС, отражающих параметры морского волнения на экране.
3. В результате проделанной работы были определены критерии выбора
устройства АЦП для обработки и анализа принимаемых РЛС сигналов.
4. В работе была реализована схема синхронизации РЛС и АЦП с минимальным количеством связей между устройствами, что облегчает реализацию
предложенного способа с другими типами РЛС и устройствами АЦП.
5. В результате проделанной работы предложены алгоритмы, позволяющие
надежно определять основные компоненты морского волнения. Практическая
реализация и проверка разработанных алгоритмов будет представлена в последующих пунктах.
6. Разработано устройство для определения состояния морской поверхности.
109
Глава 4. Апробация способа и средств определения характеристик
морского волнения
4.1. Условия проведения экспериментальных исследований
Проведение эксперимента осуществлялось с учетом того, чтобы входные
переменные измерялись в точно учитываемых условиях, позволяя оценить ход
опытов и воссоздавать их результаты каждый раз при повторении с точностью до
случайных ошибок.
Планирование и анализ эксперимента представлял собой важную часть разработанного способа для решения задачи изменения входного сигнала РЛС при
различных погодных условиях.
Одной из главных задач эксперимента являлось получение и проверка математической модели объекта, описывающей в количественной форме взаимосвязи между входными и выходными параметрами исследования [1].
Измерения проводились на водной станции Морского государственного
университета им. адм. Г. И. Невельского. Водная станция расположена на берегу
гавани для спортивных судов непосредственно к югу от мыса Купера – югозападного входного мыса бухты Федорова Амурского залива северо-западного
побережья Японского моря.
С мая по август в Амурском заливе дуют преимущественно южные и юговосточные ветры, с октября по март преобладают северные и северо-западные
ветры, изредка наблюдаются северо-восточные, которые отличаются большой силой и сопровождаются пургой. В апреле и сентябре ветры неустойчивые. В середине и конце лета отмечаются бризы, с полудня и до захода солнца наблюдаются
морские бризы юго-западных направлений. Среднее годовое число дней с туманами в Амурском заливе от 23 в вершине залива до 105 в южной его части. Течения в заливе незначительные и зависят главным образом от ветров [71].
С берега гавани водной станции можно проводить наблюдения за состоянием водной поверхности с северо-восточного по юго-западное направление. Со
стороны остальных направлений гавань окружена сопками, что уменьшает влия-
110
ние судоходства расположенной рядом бухты Золотой рог, крупнейшего тихоокеанского порта РФ – Владивосток.
Одним из условий эксперимента являлось одинаковое для разных состояний
погоды направление ветра. Поэтому для проведения эксперимента был выбран
период с августа по ноябрь в дни, когда ветер отсутствовал вовсе или преобладали преимущественно северо-западные ветры.
Натурные измерения производились на научно-исследовательском катере
«Галс» (рисунок 4.1) со следующими характеристиками: длина – 16 м;
ширина – 4 м; водоизмещение – 21 т; скорость хода – 8 узлов; научная лаборатория – 12 м2.
Навигационное оборудование – РЛС JMA-2044 , электронно-магнитный
компас, GPS recerver SPR-1400, картплотер, эхолот.
Радиооборудование – УКВ радиостанция.
Для объективного анализа и исключения погрешностей, обусловленных
качкой, сбор данных производился с фиксированного места. При всех условиях
эксперимента катер находился у причала.
Рисунок 4.1 – Судно «Галс». Экспериментальная установка
111
Скорость ветра измерялась с помощью чашечного анемометра МС-13. Высота морской волны измерялась с помощью зафиксированного на волнорезе гавани лазерного безотражательного дальномера Disto D8.
Сбор натурных данных проводился при трех состояниях волнения моря
(таблица 4.1, приложение Б) [77].
Таблица 4.1 – Погодные условия при проведении эксперимента
№ п.п.
Состояние моря
Скорость ветра, м/с
Высота волны, м
1
Легкий ветер
2
0,05 ÷ 0,1
2
Спокойный бриз
6
0,4 ÷ 0,5
3
Сильный бриз
18
1,3 ÷ 1,5
Направление ветра для случаев 2 и 3 северо-западное, курсовой угол направления распространения морского волнения визуально составлял около
200–230° (рисунок 4.2).
Рисунок 4.2 – Морское волнение в зоне проведения эксперимента:
а) погодные условия «легкий ветер»; б) погодные условия
«спокойный бриз»; в) погодные условия «сильный бриз»
Записывалось не более 50 полных оборотов антенны РЛС, что обусловлено
аппаратными возможностями вычислительного устройства.
112
4.2. Обработка результатов измерений
Видеосигнал с выхода приемника РЛС подавался на вход Ла-н20-12PCI для
преобразования аналоговых входных сигналов в цифровую форму, которая удобна для дальнейшей обработки сигнала при помощи персонального компьютера.
Частота дискретизации составляла 50 МГц, что является максимальной для данного устройства. При объеме буфера памяти 256 кСлов использовалось 1024 Слова, что позволяло получить 1024 отсчета каждого зондирующего импульса с пространственным разрешением 3 метра и разрешением оцифровки 12 бит. Входной
сигнал измерялся в единицах младшего значащего разряда. Для АЦП с разрешением 12бит предельное значение оцифровки составляет 4096 единиц. Для синхронизации преобразования принимаемых сигналов на вход синхронизации платы
подавался импульс синхронизации зондирующих импульсов РЛС, а на цифровой
вход платы – импульс начала отсчета курсового угла антенны [79].
Анализ отраженного сигнала проводился в восьми секторах размером
100 × 100 м, центры которых расположены на удалении 300 метров от антенны
РЛС, как показано на рисунке 4.3. При разрешении 3 м по расстоянию разрешающая способность по углу между смежными импульсами зондирования не превышала 1,1 м.
Углы между центрами анализируемых секторов с первого по восьмой и нулевым курсовым углом судна составляли 290°; 262.5°; 235°; 207,5°; 180°;152,5°;
55° и 0° соответственно.
Сектора 7 и 8 (рисунок 4.3) располагались в зоне отображения земной поверхности, и для всех типов анализа и вариантов эксперимента уровень принятого
сигнала в максимальном количестве координат поверхности соответствовал предельным значениям АЦП, а в секторах, расположенных в зоне отображения морской поверхности при отсутствии целей в секторе, уровень этих значений зависел
от состояния морской поверхности.
113
Рисунок 4.3 – Пример развертки экрана РЛС относительно береговой черты
Пример таких сигналов приведен на рисунке 4.4. Данный фактор экспериментально подтверждает работоспособность предложенного в третьей главе способа.
Рисунок 4.4 – Принятый сигнал при одинаковой настройке программы обработки: а) сектор 4 – водная поверхность; б) сектор 7 – земная поверхность
114
4.3 Определение средней высоты морских волн
При отсутствии волнения во всех секторах наблюдались схожие результаты
(рисунок 4.5). Уровень сигнала на входе приемника не превышал 150 МЗР, что
соответствует уровню шумов приемника РЛС. При наличии навигационной цели
в секторе уровень сигнала достигал максимума отсчетов АЦП, цель отмечалась на
экране РЛС и в программе обработки.
При увеличении интенсивности волнения увеличивалось количество импульсов, отраженных от фронта морской волны. Данные сигналы не отображались на экране РЛС, т. к. фильтровались методом межобзорной фильтрации [13].
В процессе проведения эксперимента дополнительным подтверждением того, что
эти сигналы отразились от фронта морской волны, а не от морских навигационных целей, служил визуальный контроль отсутствия навигационных целей в исследуемом секторе.
По количеству точек координатной сетки, в которых значения АЦП достигают своего максимума, можно судить о высоте морского волнения.
По формуле (2.17) были получены расчетные значения морского волнения.
Полученные значения ρпред и высоты волнения приведены в таблице 4.2.
Таблица 4.2 – Расчетные значения морского волнения
№
п/п
1
2
3
Состояние моря
Легкий ветер
Спокойный бриз
Сильный бриз
Фактическая высота
ρпред,
Расчетная высота
волнения, м
Nпред/м2
волнения, м
0,05÷0,10
0,4÷0,5
1,3÷1,5
0,1·10-2
±0,04·10-2
3,2·10-2
±0,10·10-2
7,5·10-2
±0,55·10-2
0,1
0,3÷0,4
1,3÷1,6
115
Рисунок 4.5 – Пространственное представление принятых сигналов (сектора
2, 4, 5 – водная поверхность; сектор 7 – суша): а) погодные условия «легкий
ветер»; б) погодные условия «спокойный бриз»; в) погодные условия
«сильный бриз»
116
Таким образом, зная значение ρпред для нескольких значений высоты морских волн, пользуясь способом предложенным в третьей главе, можно определить
высоту морского волнения вокруг РЛС [7].
4.4 Определение генерального направления распространения волн
Между высотой волн и шероховатостью морской поверхности существует
прямая связь. Однако шероховатость при зондировании поперек фронта волн
больше, чем при зондировании вдоль фронта. Соответственно, форма корреляционной функции в секторе позволяет судить о направлении распространения морских волн вокруг РЛС.
В выбранных секторах (рисунок 4.3) рассчитывались корреляционные функции для одного и того же координатного сектора за несколько оборотов антенны.
Полученные значения корреляционных функций подвергались некоторому сглаживанию. Это позволило выполнить экстраполяцию полученных корреляционных
функций до расстояния, равного нулю [19].
На рисунке 4.6 в качестве примера приводятся двумерные корреляционные
функции, построенные по данным зондирования морской поверхности при различном состоянии моря.
Рисунок 4.6 – Пример двумерных корреляционных функций при различном
состоянии моря: а) легкий ветер; б) спокойный бриз; в) сильный бриз
117
Далее по уровню ½ коэффициента детерминации двумерных корреляционных функций осуществлялось нахождение корреляционных эллипсов. Для дальнейшего анализа данных полей морских волн в корреляционных эллипсах находились значения длин большой оси Rh (рисунок 4.7).
Рисунок 4.7 – Пример нахождения длины большой оси корреляционного
эллипса
На рисунках 4.8, 4.9 и 4.10 приведены примеры характерных корреляционных функций и корреляционных эллипсов для секторов 2, 4 и 5 при различных
погодных условиях.
Как показал анализ корреляционных функций, построенных по данным
снимков экрана РЛС, их форма сильно отличается при различных состояниях
морской поверхности.
При легком ветре корреляционная функция отражает плавный спад примерно на 0,1 от 1 за 10÷15 м, и практически не зависит от азимутального направления
исследуемого сектора. При увеличении шероховатости морской поверхности спад
корреляционной функции значительно увеличивается. Изолинии корреляционных
функций в различных анализируемых секторах экрана РЛС похожи на эллипсы,
вытянутые вдоль направления импульса зондирования.
118
Рисунок 4.8 – Корреляционные функции и корреляционные эллипсы
при погодных условиях «легкий ветер»: а) сектор 2; б) сектор 4; в) сектор 5
119
Рисунок 4.9 – Корреляционные функции и корреляционные эллипсы
при погодных условиях «спокойный бриз»: а) сектор 2; б) сектор 4; в) сектор 5
120
Рисунок 4.10 – Корреляционные функции и корреляционные эллипсы
при погодных условиях «сильный бриз»: а) сектор 2; б) сектор 4; в) сектор 5
121
Значения длин большой оси корреляционных эллипсов представлены в таблице 4.3.
Таблица 4.3 – Средние значения длин большой оси корреляционных эллипсов
Курсовой угол,
град.
152,5
180
207,5
235
262,5
290
Высота волны
0,05÷0,1 м
40,2
39,5
38
38
39,5
39
Rh ср, м
Высота волны
0,4÷0,5 м
25,3
12
4,4
9,7
17,1
20
Высота волны
1÷1,5 м
17,5
8
2,2
7,7
10
18,8
Из рисунка 4.11 видно, что минимальному значению длины большой оси
корреляционных эллипсов соответствует курсовой угол 210°. Данные, полученные экспериментально, подтверждают результаты визуальных наблюдений.
Рисунок 4.11 – График зависимости значения длины большой оси корреляционных эллипсов от курсового угла исследуемого сектора
122
На основании полученных результатов можно сделать вывод, что по форме
корреляционной функции, рассчитанной по данным принятого сигнала, можно
определять направление распространения морского волнения [7].
4.5 Определение частоты и длины морского волнения
В разделе 3.4 был предложен алгоритм определения частоты морского волнения с помощью быстрого преобразования Фурье. Однако в связи с тем, что частота дискретизации используемого в работе АЦП составляла не более 50 МГц, то
исходя из условий теоремы Котельникова [19, 43] расчет проводился только для
высоты морского волнения 1,3÷1,5 метра.
Анализ данных (рисунок 3.8) показал, что для экспериментальной установки, используемой в работе, оценки частоты морского волнения оптимально проводить на дистанции от 150 до 300 метров. После определения направления распространения морского волнения из данных радиолокационного зондирования
выбирался сектор по курсовому углу 210 градусов, шириной 10 метров и длиной
200 метров на расстоянии 150 метров от судна.
Процедура прямого преобразования Фурье и применение теоремы Парсеваля к данным радиолокационного зондирования позволила построить функцию
средней спектральной мощности различных гармоник волнения (рисунок 4.12).
Рисунок 4.12 – Спектр морского волнения при высоте волны 1,5 м
123
На полученных спектрах наблюдаются значения основных гармоник длины
морских волн от 12 до 17 метров, что подтверждено визуальными наблюдениями
и результатами измерений другими методами [77]. Следует отметить, что погрешность определения основной гармоники морского волнения для волн высотой менее 1,5 достигает 50 %. В случае более сильного волнения форма волны
выражена более четко, погрешность измерения значительно уменьшается [121].
Проведенные в данном пункте расчеты показали работоспособность предложенного способа. Однако для расширения диапазона определения длин волн
необходимо использование АЦП с большей частотой дискретизации.
4.6. Практическое применение результатов исследования
Автором диссертационной работы предлагается автоматизировать процесс
получения характеристик морского волнения с помощью разработанного им способа. Алгоритмы, предложенные в работе, могут использоваться в программном
комплексе, предложенном М. А. Кутейниковым. Автоматическое внесение информации о параметрах волнения вокруг судна выдаст судоводителю рекомендации по выбору сочетания курсового угла и скорости движения в текущих условиях моря, которые безопасны по условиям мореходности и прочности. Благодаря
этому от оператора не требуется навыка по определению параметров морского
волнения, ввод динамических параметров волнения вручную. Также использование предложенного способа позволит проводить оценку опасности морского волнения при любом состоянии окружающей среды, в том числе ночью в условиях
сильного тумана.
Преимущество разработанного устройства над существующими зарубежными системами заключается в том, что сопоставимая точность результатов измерений достигается при высоте установки антенны РЛС всего 8 метров над
уровнем моря, когда у зарубежных от 15 м. Конечная стоимость устройства на
порядок дешевле.
124
Имея возможность автоматического определения данных о полях волн и передачи их в объединенную диаграмму безопасных режимов движения по условиям мореходности и прочности, можно создать устройство предоставления судоводителю максимально достоверную информацию для выбора оптимального способа штормования.
Используя приведенные результаты описывающие движение судна при различных условиях, можно создать устройство, позволяющее точнее рассчитывать
маневр на существующем в настоящее время оборудовании, используя дополнительные данные для расчетов. В такой системе изначально будут использоваться
параметры движения судна, полученные при заводских испытаниях. В дальнейшем коэффициенты, описывающие траекторию движения судна, корректируются
автоматически, каждый раз при изменении параметров, как судна (характера, массы груза и особенности загрузки), так и окружающей среды [5]. Если знать точную траекторию маневрирования судна, дальнейшим развитием работы в этом
направлении может быть согласование предлагаемого устройства с другим судовым навигационным оборудованием, и при движении судна устройство сможет
предупреждать судоводителя, об опасности совершения того или иного маневра в
условиях шторма. С таким устройством судоводителю становится проще избежать попадания судна в опасную зону, что, несомненно, повысит безопасность
мореплавания [119].
4.7. Выводы по четвертой главе
По результатам исследований проведенных в главе четыре можно сделать
следующие выводы.
1. Подтверждено экспериментальным путем, что измерение параметров
морского волнения предложенным способом дает устойчивые результаты определения высоты, направления и периода морского волнения.
125
2. Предложенная методика постановки эксперимента и схема его проведения работоспособны и могут найти применение при использовании разработанного устройства для других типов РЛС.
3. Погрешности измерения высоты, направления и периода морского волнения имеют достаточно хорошую сходимость с результатами теоретических исследований и результатами измерений другими методами.
4. Использование результатов исследований, предложенных в работе, позволяет осуществлять разработку устройств предупреждения судоводителей об
опасных сочетаниях курсовых углов и скоростей, интегрированных в судовые
РЛС.
126
ЗАКЛЮЧЕНИЕ
В итоге проделанной работы достигнута основная цель – повышение безопасности плавания за счет автоматического определения высоты, направления
распространения и периода морского волнения с использованием судовых РЛС.
В диссертационной работе на основании выполненных исследований получены следующие основные научные результаты и выводы.
1. В результате анализа существующих методов определения параметров
морского волнения вокруг судна установлено, что существующие в настоящее
время методы редко применимы на морских судах из-за сложности использования
и обязательного наличия дополнительного оборудования.
2. Для небольших судов информация о морском волнении более актуальна,
т. к. для них более вероятно попадание в область наиболее неблагоприятных,
а также опасных для судна волн (λ/L = 0,7÷1,3).
3. Для практического применения на судне спутниковые методы определения параметров морской поверхности при движении в штормовых условиях малоприменимы. Получение карт морского волнения требует установки дополнительного дорогостоящего оборудования. При сложных метеоусловиях получении
информации о параметрах волнения может иметь значительные задержки когда
такая информация становятся уже неактуальна для принятия решения о способе
штормования.
4. Для использования в практических целях параметры волнения, определенные любым из методов на основе функций распределения, можно пересчитать
к волнению нужной обеспеченности.
5. Вместе с изменением гидрометеорологической обстановки вокруг судна,
меняется уровень принимаемого радиолокационного сигнала. В связи с этим при
разработке способа определения параметров морского волнения необходимо учитывать изменение гидрометеорологической обстановки.
6. Проведенный анализ существующих устройств по определению характеристик морского волнения показал необходимость разработки устройства, устра-
127
няющего недостатки существующих, а именно – упрощающего конструктивное
исполнение устройства и повышающего точность измерения характеристик морского волнения.
7. Эффективная площадь рассеяния поверхности, обладающей сложной шероховатостью, определяется параметрами шероховатости и влияет на характеристики отраженного от морской поверхности сигнала. Это в свою очередь позволяет рассчитать высоту морского волнения по уровню сигнала, отраженного в сторону РЛС от моря.
8. С помощью обработки двумерных корреляционных функций, характеризующих пространственную структуру поля морского волнения, можно достоверно
определять направление фронта распространения морского волнения.
9. Применение таких элементов спектрально анализа, как метод быстрого
преобразования Фурье и теорема Парсеваля, к данным радиолокационного зондирования, выбранным поперек фронта распространения морского волнения, позволяет определить период морского волнения.
10. Контролируя параметры волнения можно определять опасные изменения глубины вокруг судна. При этом, кроме РЛС и разработанного устройства,
не требуется использования иного судового оборудования.
11. При наличии подробной схемы судовой РЛС возможна реализация
предлагаемого в работе алгоритма с выводом информации сразу на ПК. Используя разрабатываемый в работе способ, возможно создание судовых РЛС, отражающих параметры морского волнения на экране.
12. В работе была реализована схема синхронизации РЛС и АЦП с минимальным количеством связей между устройствами, что облегчает реализацию
предложенного способа с другими типами РЛС и устройствами АЦП.
13. В результате проделанной работы предложены алгоритмы, позволяющие
надежно определять основные компоненты морского волнения.
14. Разработано устройство для определения состояния морской поверхности.
128
15. Погрешности измерения высоты, направления и периода морского волнения имеют достаточно хорошую сходимость с результатами теоретических исследований и результатами измерений другими методами.
16. Использование результатов исследований, предложенных в работе, позволяет осуществлять разработку устройств, предупреждающих судоводителей
об опасных сочетаниях курсовых углов и скоростей.
129
СПИСОК ЛИТЕРАТУРЫ
1.
Адлер Ю. П. [и др.] Планирование эксперимента при поиске опти-
мальных условий. – М.: Наука. 1976. – 270 с.
2.
Акмайкин Д. А., Хоменко Д. Б. Защита судовых навигационных ра-
диолокационных станций от помех при аналоговой и цифровой обработке сигналов: монография. – Владивосток: Мор. гос. ун-т, 2011. – 84 с.
3.
Акмайкин Д. А., Хоменко Д. Б. Определение параметров морской по-
верхности с помощью судовой радиолокационной станции // Вестн. Мор. гос.
ун-та. – Сер. Судовождение. – Вып. 42/2010. – Владивосток: Мор. гос. ун-т, 2010.
– С. 48–53.
4.
Акмайкин Д. А., Хоменко Д. Б. Совместное определение параметров
цели с помощью судовой РЛС и транспондера АИС // Эксплуатация морского
транспорта: сб. науч. стат. – СПб.: Гос. мор. академ. – 2010. – № 4(62). – С. 48–51.
– ISSN 1992-18181.
5.
Акмайкин Д. А., Пилюгин А. Г., Хоменко Д. Б. Особенность маневри-
рования наливных судов в зависимости от параметров груза // Эксплуатация морского транспорта: сб. науч. стат. – СПб.: Гос. мор. академ. – 2009. – № 4(58). –
С. 17–21. – ISSN 1992-18181.
6.
Акмайкин Д. А., Хоменко Д. Б. Методы интерполяции данных радио-
локационного зондирования // Проблемы транспорта Дальнего Востока: пленар.
докл. 9-й междунар. науч.-практич. конф. FEBRAT-11 (5–7 октября) / ДВО Российской академии транспорта. – Владивосток: Мор. гос. ун-т, 2011. –
C. 56–59.
7.
Акмайкин Д. А., Хоменко Д. Б., Клюев Д. В., Фалина Е. С. Обработка
радиолокационной информации программно-аппаратными средствами // Автоматизация процессов управления: науч.-техн. журн. – Ульяновск: НПО «Марс». –
2012. – № 4(30). – С. 62–66. – ISSN 1991-2927.
8.
Алексеев Г. М. [и др.] Морское дело / под ред. А. И. Щетининой – Л.:
Транспорт, 1967. – 880 с.
130
9.
Альперс В., Вильде А., Брюнинг К. [и др.] Отображение морского
волнения радиолокаторами с синтезированной апертурой. Сравнительный анализ
данных, полученных ИСЗ “Алмаз-1” и ERS-1 // Исслед. Земли из космоса, 1994. –
№ 6. – С. 83–95.
10.
Андронов А. А., Леонтович М. А. К теории молекулярного рассеяния
света на поверхности жидкости. – М: Изд-во АН СССР – 1956. № 5.
11.
Антонов В. А., Письменный М. Н. Теоретические основы управления
судном: учеб. пособие – 2-е изд., перераб. и доп. – Владивосток: Мор. гос. ун-т,
2007. –78 с.
12.
Ануфриев И. Е. Самоучитель MatLab 5.3/6.x. – СПб.: БХВ-Петербург,
2004. – 736 с. – ISBN 5-94257-107-0.
13.
Афанасьев В. В., Маринич А.Н., Припотнюк А. В., Устинов Ю. М.
Судовые радиолокационные системы: Учебник / под ред. Ю. М. Устинова. –
СПб.: Веленара, 2009. – 366 с.
14.
Ахмедов JI. H., Гардашов Р. Г., Шифрин К. С. О расчете флуктуации
интенсивности параллельного пучка света, отраженного от морской поверхности
// Изв. АН СССР. Сер. Физика атмосферы и океана. – 1990. – Т. 26. – № l. –
С. 99–103.
15.
Байрошевский А. М. Судовые радиолокационные станции – Л.: Изд-
во: Мор. Транспорт, 1988. – С. 199–202.
16.
Байрашевский А. М., Ничипоренко Н. Т. Судовые радиолокационные
системы: учебник для мор. вузов. – 2-е изд., перераб. и доп. – М.: Транспорт, 1982.
– 317 с.
17.
Байрошевский А. М. [и др.] Судовая радиоэлектроника и радионави-
гационные приборы. – М: Транспорт – 1988. – 271 с.
18.
Баркан В. Ф., Жданов В. К. Радиоприемные устройства – М.: Оборон-
гиз, 1956. – 496 с.
19.
Баскаков С. И. Радиотехнические цепи и сигналы: учебник для вузов
по спец. «Радиотехника» – 3-е изд., перераб. и доп. – М.: Высш. шк., 2000. – 462 с.
131
20.
Басс Ф. Г., Фукс И. М. Рассеяние радиоволн на статистически неров-
ной поверхности. – М.: Наука, 1972. – 424 с.
21.
Басс Ф. Г. К теории комбинированного рассеяния волн на неровной
поверхности: учеб. пособ. для вузов. сер. Радиофизика. – М.: – 1961. – Т. 4. – № 1.
– 58 с.
22.
Басс Ф. Г. К теории рассеяния коротких и средних радиоволн на мор-
ской поверхности // Радиоокеанографические исследования морского волнения. –
Киев: Изд-во АН УССР, 1962. – 79 с.
23.
Басс Ф. Г., Бочаров В. Г. К теории рассеяния электромагнитных волн
на статистически неровной поверхности // Радиотехника и электроника. – 1958. –
№ 2 – С. 180–186.
24.
Брынский Д. Е. Оценки длины волны в групповых наблюдениях орто-
гонально-линеечным волномером в сопоставлении с оценками другими способами / Д. Е. Брынский, С. В. Касилов, Д. В. Сердюков, В. И. Сичкарев // Судовождение-2000: сб. науч. трудов. – Новосибирск: НГАВТ, 2000. – С. 34–43.
25.
Букин О. А. [и др.] Использование пассивно-активных методик опти-
ческого зондирования для измерения структурных особенностей распределения
биооптических характеристик в верхнем слое океана // Оптика атмосферы и океана. – 2000. – Т. 13. – № 09. – C. 847–851.
26.
Вагущенко Л. Л. Судовые навигационно-информационные системы –
Одесса: Латстар, 2004. – 302 с.
27.
Вагущенко Л. Л. Интегрированные системы ходового мостика. –
Одесса: Латстар, 2003. – 169 с.
28.
Васин В. В., Степанов Б. М. Справочник-задачник по радиолокации –
М.: Сов. радио, 1977. – 320 с.
29.
Васюков В. Н. Цифровая обработка сигналов и сигнальные процессо-
ры в системах подвижной радиосвязи – Новосибирск: НГТУ. – 2006. – 292 с. –
ISBN: 5-7782-0314-4.
132
30.
Власов В. И. [и др.] Судовые радиолокационные станции и их приме-
нение: справоч. руковод. / под ред. В. И. Ракова. В 2 т. Т 1. – Л: Судостроение,
1969. – 408 с.
31.
Волгин В. В., Каримов Р. Н. Оценка корреляционных функций в про-
мышленных системах управления. – М.: Энергия, 1979. – 80 с.
32.
Выбор безопасных скоростей и курсовых углов при штормом плава-
нии судна на попутном волнении: РД 31.00.57.2.-91 – Утв. М-вом транспорта
Рос. Федерации 22.02.93; ввод. в действие с 01.09.93. – СПб.: ЗАО ЦНИИМФ,
2002. – 59 с.
33.
Высокочастотные АЦП // Компания сигнал. URL: www.signal.ru (дата
обращения 24.10.2011).
34.
Гандин Л. С., Каган Р. С. Статистические методы интерпретации ме-
теорологических данных. – Л.: Гидрометеоиздат, 1976. – 359 с.
35.
Гардашова Т. Г., Гардашов Р. Г. Математическое моделирование ста-
тистических характеристик света, отраженного от морской поверхности // Изв.
РАН. Физика атмосферы и океана. – 2001. – Т. 37. – № 1. – C. 74–84.
36.
Гардашов Р. Г. Обратная задача определения плотности распределе-
ния зеркальных точек на морской поверхности // Изв. РАН. Физика атмосферы и
океана. – 2006. – Т. 42. – № 5. – С. 687–692.
37.
Гершензон Е.М., [и др.] Радиотехника: учеб. пособие. – М.: Просве-
щение, 1986. – 319 с.
38.
Грудинская Г. П. Распространение радиоволн: учеб. пособие для ра-
диотех. спец. вузов. – изд. 2-е, перераб. и доп. – М.: Высш. шк., 1975. – 280 с.
39.
Гук М. Интерфейсы ПК: справочник – СПб: ЗАО Изд-во «Питер»,
1999. – 416 с.
40.
Демин С. И., Жуков Е. И. [и др.] Управление судном / под ред.
В. И. Снопкова. – М.: Транспорт, 1991. – С. 195–204.
41.
Демиденко П. П Судовые радиолокационные и радионавигационные
системы: учеб. пособие – Одесса: Феникс, 2009. – 372 с.
133
42.
Дженкинс Г., Ваттс Д. Спектральный анализ и его приложения / пер. с
англ. В. Ф. Писаренко. – М.: Мир, 1971. – 158 с.
43.
Дискретизация непрерывных сигналов во времени. Теорема Котель-
никова: электрон. учеб.-метод. пособие / под ред. И. П. Ястребова. – Нижний Новгород: Нижегород. гос. ун-т, 2012. – 31 с.
44.
Дьяконов В. П. Mathematica 5.1/5.2/6. Программирование и математи-
ческие вычисления. – М.: ДМК-Пресс, 2008.– 576 с.
45.
ЗАО «Руднев–Шиляев» // Технические характеристики АЦП. URL:
www.rudshel.ru (дата обращения 03.10.2011).
46.
ЗАО «Инструментальные системы». URL: www.insys.ru (дата обраще-
ния 25.10.2011).
47.
Защита радиолокационных систем от помех. Состояние и тенденции
развития / под ред. А. И. Канащенкова и В. И. Меркулова – М.: Радиотехника,
2003. – 416 с.
48.
Заявка № 2012125680/28(039446). Российская Федерация, МПК7
G01S13/00, G01S7/00. Устройство для определения состояния морской поверхности
/
Хоменко
Д.
Б.,
Акмайкин
Д.
А.;
заявитель:
МГУ
им.
адм.
Г. И. Невельского; заявл. 19.06.12. – 5 с. : ил.
49.
Зинченко К. И. Разработка метода полуавтоматической обработки ра-
диолокационного снимка волнения // Судовождение-2012: сб. науч. тр. – Новосибирск: НГАВТ, 2012. – С. 73–86.
50.
Зубкович С. Г. Статистические характеристики радиосигналов, отра-
женных от земной поверхности. – М.: Сов. радио, 1968. – 224 с.
51.
Изюмов Н. М., Линде Д. П. Основы радиотехники – М.: «Энергия»,
1971. – 480 с.
52.
Исакович М. А. Рассеяние волн от статистически шероховатой по-
верхности // Журнал экспериментальной и теоретической физики. – 1952. –
Т. 23. – № 3(9). – С. 305–314.
53.
Кацнельсон В. З. [и др.] Основы радиолокации и импульсной техники
– Л.: Гидрометеоиздат, 1985. – 307 с.
134
54.
Колесниченко О. В., Шишигин И. В. Аппаратные средства РС. – 4-е
изд., перераб. и доп. – СПб.: БХВ-Петербург, 2002. – 1024 с.
55.
Компания сигнал // Высокочастотные АЦП. URL: www.signal.ru (дата
обращения 24.10.2011).
56.
Кондрашев В. Е., Королев С. В. MATLAB как система программиро-
вания научтно-технических расчетов. – М.: Мир; Ин-т стратегич. стабильности
Минатома РФ, 2002. – 350 с.
57.
Коновалов В. В., Кузнецова Л. И., Мельников Н. П. Судовые радиона-
вигационные приборы: Учебник для мореход. Училищ. – 5-е изд., перераб. и доп.
– М.: Транспорт, 1989. – 223 с.
58.
Корн Г., Корн Т. Справочник по математике для научных работников
и инженеров. – М.: Наука, 1984. – 831 с.
59.
Космические исследования океана. URL: http://www.geogr.msu.ru (да-
та обращения 03.12.2012).
60.
Кулемин Г. П., Разсказовский В. Б. Рассеяние миллиметровых радио-
волн поверхностью Земли под малыми углами – Киев: Наукова думка, 1987. –
230 с.
61.
Курьянов Б. Ф. Рассеяние звука на шероховатой поверхности с двумя
типами неровностей // Акустический журнал. – 1962. – Т. 8. – № 3. – С. 325–333.
62.
Кутейников М. А. Разработка теоретических основ и методологии
комплексного нормирования мореходности с учетом прочности морских судов:
автореф. дис. … докт. техн. наук : 05.08.01 : защищена 08.06.10 / Кутейников Михаил Анатольевич. – СПб., 2010. – 32 с.
63.
Кушнир В. М., Душко В. Р., Федоров С. В. Воздействие морской сре-
ды на системы освоения шельфа. – Севастополь: Изд. СевНТУ, 2009. – 303 с.
64.
Кушнир В. М. Федоров С. В. Оценки больших скоростей ветра по
спектральным характеристикам // Метеорология и гидрология. – 2001. – №2. –
С. 56–65.
65.
Левин А. Ш. Самоучитель работы на компьютере / 9-е изд.– СПб.:
Питер, 2007. – 748 с.
135
66.
Липис В. Б., Ремез Ю. В. Безопасные режимы штормового плавания. –
М.: Транспорт, 1982. – 117 с.
67.
Литовченко К. Ц., Раев М. Д., Семенов С. С. [и др.] Оценка парамет-
ров морских волн по спектрам изображений, полученных РСА с различных высот
спутниковых орбит // Исслед. Земли из космоса. – 1995. – № 3. – С. 47–55.
68.
Лихачев А. В. Управление судном: учебник для мор. вузов. – СПб.:
изд-во политехн. ун-та, 2004. – 504 с.
69.
Логвинов Ю. Ф. Влияние затенений на статистические характеристи-
ки зеркальных элементов при многолучевом распространении над морем // Радиофизика и радиоастрономия. – 1997. – Т. 2. – № 4, – С. 450–456.
70.
Лоскутов
Н.
В.
Малогабаритная
радиолокационная
станция
JMA-2044: пособие по изуч. – Владивосток: Мор. гос. ун-т, 2006. –18 с.
71.
Лоция
северо-западного
берега
японского
моря
/
под
ред.
Ю. В. Старков. – СПб.: ЦКП ВМФ, 1996. – Ч. 1. – 360 с.
72.
Лубковский В. К. Сопоставление статистических характеристик вол-
нового поля по замерам ортогонально-линеечным волномером и по фотоснимкам
экрана РЛС // Научные проблемы Сибири и Дальнего Востока – Новосибирск:
ФГОУ ВПО «НГАВТ», 2009. – №1 – С. 165–169.
73.
Лубковский В. К. Анализ волнового поля по фотоснимкам экрана су-
довой РЛС// Научные проблемы Сибири и Дальнего Востока. – Новосибирск:
ФГОУ ВПО «НГАВТ», 2008. – № 2 – С. 115–119.
74.
Матущевский Г. В. О некоторых важных вопросах измерения волн
неконтактными методами // Неконтактные методы измерения океанографических
параметров: сборник – М.: Моск. отд. гидрометеоиздата, 1977. – С. 96–99.
75.
Миронов Б. Н., Степанов З. В. Историк и математика / АН СССР. – Л.:
Наука, 1976. – 185 с.
76.
Морская радиолокация / под ред. В. И. Винокурова. – Л.: Судострое-
ние, 1986 – 256 с.
136
77.
О погодных условиях и состоянии морского волнения в районе мыса
Купера 15.10.2011, 17.10.2011 и 18.10.2011: справка. – Владивосток: ООО «Метеосервис», 2013. – 1 с.
78.
ООО «Л Кард» / Индустриальные системы управления и сбора дан-
ных. URL: www.lcard.ru (дата обращения 24.10.2011).
79.
Описание унифицированных драйверов для работы с платами
ЛА-XXX в операционной системе Windows 95/98/Me/2K/XP // Руководство пользователя. – М.: ЗАО «Руднев–Шиляев», 2001. – 78 с.
80.
Орошук И. М. Космические и наземные средства связи и сети телера-
диовещания: курс лекций. – Владивосток: ДВГТУ, 2006. – 456 с.
81.
Пат. № 2018873(13) Российская Федерация, МПК5 G 01 S 13/95. Уст-
ройство для измерения характеристик поверхностного волнения / Ушаков И. Е. ;
заявитель Ин-т эколог. проблем Севера Уральского отдел. РАН; патентообладатель Ушаков И. Е. – № 4881265/09 ; заявл. 11.11.1990; опубл. 30.08.1994. –
5 с. : ил.
82.
Пат. 2018874(13) Российская Федерация, МПК5 G 01 S 13/95. Устрой-
ство для измерения характеристик морского волнения / Ушаков И. Е., Матюшенко В. А.; заявитель Ин-т эколог. проблем Севера Уральского отдел. РАН; патентообладатель Ушаков И. Е., Матюшенко В. А. – № 4881266/09 ; заявл. 11.11.1990;
опубл. 30.08.1994. – 5 с. : ил.
83.
Пат. 2018875(13) Российская Федерация, МПК5 G 01 S 13/95. Устрой-
ство для измерения характеристик морского волнения / Ушаков И. Е., Матюшенко В. А., Жирухин А. В.; заявитель Ин-т эколог. проблем Севера Уральского отдел. РАН; патентообладатель Ушаков И. Е., Матюшенко В. А., Жирухин А. В. –
№ 4904221/09 ; заявл. 26.12.1990; опубл. 30.08.1994. – 5 с. : ил.
84.
Плекин В. Я. Цифровые устройства селекции движущихся целей – М.:
САЙНС-ПРЕСС, 2003. – 80 с.
85.
Половко А. М., Бутусов П. Н. MATLAB для студента. – СПб.: БХВ-
Петербург, 2005. – 320 с. – ISBN 5-94257-595-5.
137
86.
Поршнев С. В., Беленкова И. В. Численные методы на базе Mathcad. –
СПб: БХВ-Петербург, 2005. – 456 с. – ISBN: 5-94157-610-2.
87.
Прецизионная плата аналого-цифрового преобразования для IBM
PC/AT-совместимых компьютеров Ла-н20-12PCI: руководство пользователя. – М.:
ЗАО «Руднев–Шиляев», 2001. – 38 с.
88.
Разработка методов определения различных компонент гидрометео-
рологических параметров с судна в движении // отчет о НИР (промежуточ.) : 4550 / Фонд содействия развитию малых форм предприятий в науч.-техн. сфере,
программа «УМНИК» ; рук. Бортник И. М.; исполн.: Хоменко Д. Б. – М., 2011. –
63 с. – Библиогр.: с. 59-63. – № ГР 01201168517. – Инв. № 120424101303.
89.
Разсказовский В. Б., Педенко Ю. А. Зарубежная радиоэлектроника –
1996. – № 7. – С. 29–39.
90.
Регистр СССР. Ветер и волны в океанах и морях: справочные данные.
– Л.: Транспорт, 1974. – 360 с.
91.
Резолюция ИМО А.751(18) // Сб. резолюций № 2 ИМО. – СПб.:
ЦНИИМФ, 1994 – С. 76–83.
92.
Решетнев М. Ф. Развитие спутниковых радиолокационных систем //
Информационный бюллетень НТЦ «Интернавигация». – 1992. – № 1. – С. 6–10.
93.
Рынок микроэлектроники // Параметры АЦП. URL: www.gaw.ru (дата
обращения 03.10.2011).
94.
Сборник характерных аварийных случаев с судами на морском транс-
порте за 2004–2006 гг. – СПб.: ЗАО ЦНИИ МФ, 2007. – 124 с.
95.
Сичкарев В. И. Способ и прибор для дистанционного определения
длины волны на ходу судна // Судовождение: управляемость, управление, навигация, обучение: сб. науч. тр. – Новосибирск: Новосиб. гос. акад. вод. трансп., 1999.
– С. 3–9.
96.
Сичкарев В. И. Длино-высото-волномер из трёх ортогонально распо-
ложенных линеек // Судовождение-2004: сб. науч. тр. – Новосибирск: Новосиб.
гос. акад. вод. трансп., 2004. – С. 4–11.
138
97.
Сичкарев В. И. Измерение высот и длин волн ортогонально-
линеечным длино-высото-волномером // Науч. проблемы трансп. Сибири и Дальнего Востока. – 2007. – № 1. – С. 48–54.
98.
Сичкарев В. И. Определение параметров волнения по фотографии на
основе метода ортогонально-линеечного волномера // Судовождение-2010: сб. науч. тр. – Новосибирск: Новосиб. гос. акад. вод. трансп., 2010. – С. 52–58.
99.
Сичкарев В. И. Способ определения высот волн по радиолокационной
картине волнового поля // Судовождение-2010: сб. науч. тр. – Новосибирск: Новосиб. гос. акад. вод. трансп., 2010. – С. 3–19.
100. Сичкарев В. И. Точность измерения длин волн волномером Сичкарёва
/ В. И. Сичкарев // Судовождение-2000: сб. науч. тр.– Новосибирск: Новосиб. гос.
акад. вод. трансп., 2000. – С. 13–25.
101. Сичкарев В. И. Статистические характеристики рельефных волн, измеренных ортогонально-линеечным волномером Сичкарева // Судовождение2000: сб. науч. тр. – Новосибирск: Новосиб. гос. акад. вод. трансп., 2000. –
С. 26–33.
102. Сичкарев В. И., Зинченко К. И. Новые технологии обработки волномерных наблюдений с движущегося судна // Научные проблемы транспорта Сибири и Дальнего Востока. – Новосибирск: Новосиб. гос. акад. вод. трансп., 2012. –
С. 151–154. – ISSN 2071-3827.
103. Справочник капитана / под ред. Б. П. Хабура. – М.: Транспорт, 1972. –
708 с.
104. Сколник М. Справочник по радиолокации. В 2 т. Т. 1. – М.: Сов. радио, 1976. – 456 с.
105. Создание лабораторной установки для проведения экспериментальных
работ
по
тематике
проекта:
отчет
о
НИР
(промежуточ.)
:
41–45 // Фонд содействия развитию малых форм предприятий в науч.-техн. сфере,
программа «УМНИК»; рук. И. М. Бортник; исполн.: Д. Б. Хоменко – М.: 2011. –
63 с. – Библиогр.: с. 59–63. – № ГР 01201168517. – Инв. № 120424101303.
139
106. Статическая передаточная функция АЦП и ЦАП и погрешности по
постоянному току // Применение цифровой техники в аппаратуре связи.
URL: www.digteh.ru (дата обращения 23.11.2011).
107. Татараев T. М., Гардашова Т. Г., Эминов Ш. О. Дистанционное зондирование морской поверхности методом зеркальных точек // Изв. нац. академ.
наук Азербайджана. Сер. физ.-мат. и техн. наук, 2004. – № 5. – C. 131–137.
108. Теоретические основы радиолокации : учеб. пособие для вузов /
под ред. Я. Д. Ширмана – М.: Сов. радио, 1970. – 560 с.
109. Типичные аварийные случаи с морскими судами / отв. ред.
Г. М. Овчинников. – СПб.: ЦНИМФ, 1994. – 90 с.
110. Ушаков И. Е., Шишкин И. Ф. Радиолокационное зондирование морской поверхности. – М.: РИЦ «Татьянин день», 1997. – 264 с.
111. Файнберг Е. Л. Распространение радиоволн вдоль земной поверхности. – М.: Изд-во АН СССР, 1961. – 546 с.
112. Хоменко Д. Б. Оптимизация выбора курса движения судна в зависимости от параметров морской волны // Молодежь и научно-технический прогресс:
мат-лы науч.-практ. конф. В 2ч. Ч 1. – Владивосток: ДВГТУ, – 2009. – С. 376–380.
– ISSN 2072-9057.
113. Хоменко Д. Б., Акмайкин Д. А. Система контроля маневрирования
судна с учетом динамических параметров движения // Сб. докл. 57-й междунар.
молодеж. науч.-технич. конф. «Молодежь – Наука – Инновации» (25–26 ноября).
В 2 т. Т 1. – Владивосток: Мор. гос. ун-т, 2009. – С. 49–53.
114. Хоменко Д. Б. Методы цифрового определения помех судовой радиолокационной станции // Молодежь и научно-технический прогресс: матер. науч.практ. конф. В 2 ч. Ч 1. – Владивосток: ДВГТУ, – 2011. – С. 338–343. –
ISSN 2072-9057.
115. Хоменко Д. Б. Использование программно-аппаратных средств в обработке радиолокационной информации // Сб. докл. 58-й междунар. молодеж. науч.-технич. конф. «Молодежь – Наука – Инновации» (24-25 ноября). В 2 т. Т 1. –
Владивосток: Мор. гос. ун-т, 2010. – С. 23–26.
140
116. Хоменко Д. Б., Акмайкин Д. А. Учет динамических характеристик судов при маневрировании // Современные техника и технологии: сб. тр. XVІ междунар. науч.-практич. конф. студентов, аспирантов и молодых ученых. В 3 т. Т 1.
– Томск: Изд-во Томск. политехнич. ун-та, – 2010. – С. 280–282.
117. Хоменко Д. Б., Акмайкин Д. А., Лоскутов Н. В. Защита судовых навигационных радиолокационных станций от помех при аналоговой обработке сигналов // Морские исследования на Дальнем Востоке: сб. науч. тр. курсантов, студентов и молодых ученых. – Владивосток: Мор. гос. ун-т, 2011. – С. 29–36.
118. Хоменко Д. Б., Акмайкин Д. А. Обзор траекторий маневрирования судов различных типов на глубокой воде и мелководье [Электронный ресурс] //
Вестн. инженер. шк. ДВФУ. – Владивосток: ДВФУ. – 2012. – № 4 (13) – С. 79–82.
– ISSN 22227-6858.
119. Хоменко Д. Б., Акмайкин Д. А. Обзор современных рекомендаций
штурманской службе по управлению судном на волнении // Сб. докл. 60-й междунар. молодеж. науч.-технич. конф. «Молодежь – Наука – Инновации»
(17–18 сентября). В 2 т. Т. 1. – Владивосток: Мор. гос. ун-т, 2012. – С. 48–51.
120. Хоменко Д. Б., Акмайкин Д. А. Обоснование характеристик АЦП для
анализа эхосигналов РЛС // Сб. докл. 59-й междунар. молодеж. науч.-технич.
конф. «Молодежь – Наука – Инновации» (23–25 ноября). В 2 т. Т.1. – Владивосток: Мор. гос. ун-т, 2011. – С. 26–29.
121. Хоменко Д. Б. Методы определения параметров морского волнения с
помощью судовой радиолокационной станции // Сб. докл. 61-й междунар. молодеж. науч.-технич. конф. «Молодежь – Наука – Инновации». – Владивосток: Мор.
гос. ун-т, 2013. – С. 18–20.
122. Чернов Ю. М. Уточнение выражений для поля, рассеянного шероховатой поверхностью // Изв. вузов. Сер. Радиотехника. – 1969. – Т. 24. – № 11.
123. Шарлай Г. Н. Управление морским судном: учеб. пособие. – Владивосток: Мор. гос. ун-т, 2008. – 492 с.
124. Шестов Н. В. [и др.] Измерение спектров Фурье двумерных функций
// Успехи физических наук. – 1968. – Т. 96 (4). – С. 717–740.
141
125. Шмелев А. Б. Рассеяние волн статистически неровными поверхностями // Успехи физических наук. – 1972. – Т. 106 (3). – С. 359–480.
126. Эксперты назвали причину гибели сахалинского судна «Аргонавт»:
статья. – Информационное агентство «Дейта». URL: http://deita.ru (дата обращения 28.10.2013).
127. Ярощук В. В., Хоменко Д. Б. Плюсы и минусы обнаружения соседних
судов с помощью РЛС и АИС // Сб. докл. 57-й междунар. молодеж. науч.-технич.
конф. «Молодежь – Наука – Инновации» (25–26 ноября). В 2 т. Т. 1. – Владивосток: Мор. гос. ун-т, 2009. – С. 58–62.
128. Akmaykin D., Khomenko D. Use of Ships Radar for Improvement of Navigation in Rough Sea Condition // International Siberian Conference on Control and
Communications (SIBCON): Proceedings. – Krasnoyarsk: Siberian Federal University.
Russia. (September 15−16) 2011. – Р. 147–148.
129. Alpers W. Ocean surface wave imaging from Seasat to Envisat – Proc.
IGARSS-2003 (21–25 July). – Toulouse, France, 2003. – V. 1. – P. 35–37.
130. Beckman P. The scattering of electromagnetic waves from rough surfaces.
– Oxford: Pergamon Press, 1963.
131. Beckman P., Spizzichino A. The scattering of electromagnetic waves from
rough surface. – London: Pergamon press, 1963. – 303 p.
132. Engen G., Johnsen H., Krogstad H. E., Barstow S. F. Directional wave
spectra by inversion of ERS-1 synthetic aperture radar ocean imagery // IEEE Trans.
Geosci. Rem. Sens. – 1994. – V. 32. – P. 340–352.
133. Engen G., Johnsen H. SAR Ocean wave inversion using image cross spectra // IEEE Trans. Geosci. Rem. Sens. – 1995. – V. 33. – № 4. – P. 1047–1056.
134. Gardachov R. G. The Probability Density of the Total Curvature of a Uniform Random Gaussian Sea Surface, Int. – J. Remote Sensing. – 2000. – V. 21. –
№ 15. – P. 2917–2926.
135. Gardashovа Т. G., Ргос. оf IММ оf NAS Аzегbaijan, ХIV (ХХП). – 2001.
– 149 р.
142
136. Hasselmann K., Hasselmann S. On the nonlinear mapping of an ocean
wave spectrum into a synthetic aperture radar image spectrum and its inversion //
J. Geophys. Res. – 1991. – V. 96. – № C6. – P. 10713–10729.
137. Hasselmann S., Brüning C., Hasselmann K., Heimbach P. An improved algorithm for the retrieval of ocean wave spectra from synthetic aperture radar image
spectra // J. Geophys. Res. – 1996. – V. 101. – № C7. – P. 16615–16629.
138. IMO MSC.1/Circ.1228 «Revised guidance to the master for avoiding dangerous situations in adverse weather and sea conditions», 11 January 2007. – 8 p.
139. Krogstad H. E. A simple derivation of Hasselmann as nonlinear ocean-tosynthetic aperture radar transform // J. Geophys. Res. – 1992. – V. 77. – № C2. –
P. 2421–2425.
140. Krogstad H. E., Samset O., Vachon P. W. Generalization of the non-linear
ocean SAR transform and a simplified SAR inversion algorithm // Atmosphere – Ocean.
– 1994. – V. 32. – № 1. – P. 61–82.
141. Marine radar equipment JMA-2044MII // Instruction manual. – Japan Radio Co., LTD. – 68 р.
142. Nieto. J.-C., Analisis de Campos de Oleaje Mediante Radar de Navigacion
en Banda X. – Ph. D. thesis at the dep. of physics of the University of Madrid. – Spanish, 1997.
143. Rice S. 0. Reflection of electromagnetic waves from slightly rough surfaces // Communications in Pure and Applied Mathematics. – 1951. – V. 4 – P. 361–
378.
144. Skolnik M. Radar handbook. – Third Edition. – The McGraw-Hill Companies, 2008. – 1351 p.
145. Wave measurement from SAR imagery / Boost technologies. URL:
http://www.boost-technologies.com (дата обращения 15.10.2012).
146. Ziemer. F., Brockmann C., Vaughan R. A., Seeman J., Senet C. M. Radar
survey of near shore bathymetry within the OROMA project // EARSeL Proceedings. –
2004. – № 3(2). – P. 282–288.
143
147. Ziemer F., Flampouris S., Seeman J. Accuracy of Bathymetric Assessment
by Locally Analyzing Radar Ocean Wave Imagery // IEEE transactions on geoscience
and remote sensing. – 2008. – V. 46. – № 10. – P. 2906–2913.
144
ПРИЛОЖЕНИЯ
145
Приложение А
(справочное)
Решение о выдаче патента на изобретение
146
147
148
149
150
151
152
153
Приложение Б
(справочное)
Справка о погодных условиях и состоянии морского волнения
в районе мыса Купера