pdf-file 116 KB
advertisement

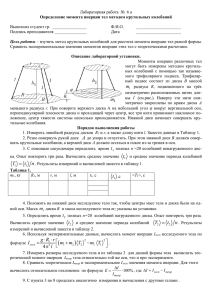
ЛАБОРАТОРНАЯ РАБОТА 5 ИЗМЕРЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДЫХ ТЕЛ Цель работы: определить величину момента инерции цилиндра в зависимости от расстояния между осью симметрии тела и осью вращения. КРАТКАЯ ТЕОРИЯ 1. Поступательное движение тел, можно рассматривать как движение материальной точки - центра масс тела, а движение материальной точки, как известно, описывается с помощью кинематических величин – перемещения s, скорости v и ускорения a. Характер такого движения определяется динамическими величинами - масса тела m и приложенная сила F. Основной закон движения - второй закон Ньютона имеет вид F = ma . (1) Вращательное движение тела около неподвижной оси нельзя рассматривать как движение точки, так как различные точки тела совершают разные движения. Различные и их скорости и ускорения. Поэтому вращательное движение удобно описывать другими кинематическими величинами - углом поворота ϕ, угловой скоростью ω и угловым ускорением ε. Величины s, v и a, с одной стороны и величины ϕ,ω и ε, с другой стороны, связаны между собой соотношениями s = r ⋅ϕ , v = r ⋅ω , a = r ⋅ε , (2) где r - радиус вращения точки. Динамические величины, которые описывают вращательное движение, также друα А – точка при- гие. Вместо силы F при вращательном движеF ложения силы нии используют момент силы M. Модуль моА мента силы связан с модулем силы соотношением r M = r ⋅ F ⋅ Sinα (3) О – ось вращения О Здесь r - расстояние от оси вращения до точки приложения силы и α - угол между r и F (см. Рис.1 рис.1). Величина rSinα называется плечом силы. Из рисунка видно, что плечо силы - это кратчайшее расстояние между осью вращения и линией действия силы. При α=90о - M=rF, а при α=0о или 180о величина M=0. Вторую динамическую величину, заменяющую при вращательном движении массу, можно найти, применив второй закон Ньютона к вращательному движению некоторой точки тела. При этом надо иметь в виду, что роль силы играет момент силы и вращательное движение описывается угловым ускорением ε, а не линейным - а. Умножив обе части равенства (1) на r, получим r⋅F=m⋅a⋅r. Заменив здесь линейное ускорение а его выражением (2), получим (4) r ⋅ F = M = m ⋅ r 2ε Из этого выражения видно, что роль массы при вращательном движении играет величина mr2 (она, также как и масса m, является коэффициентом пропорциональности между динамической и кинематической величинами). Называется эта величина моментом инерции. Обозначают её буквой J. Таким образом, второй закон Ньютона для вращательного движения можно записать в виде PDF created with FinePrint pdfFactory trial version www.pdffactory.com M = J ⋅ε (5) Момент инерции, как и масса, обладает свойством аддитивности. Это означает, что момент инерции системы тел равен сумме моментов инерции всех тел системы. Отсюда следует, что момент инерции тела равен сумме моментов инерции его частей, то есть, если мысленно разделить тело на отдельные малые элементы массой ∆mi, то момент инерции тела равен сумме моментов инерции всех элементов J = ∑ ri 2 ∆mi , (6) i ( ) где ∆mi - масса i-го элемента, ri- его расстояние от оси вращения. Из приведенных примеров видно, что момент инерции тела характеризует распределение массы тела относительно оси вращения: момент инерции тела тем больше, чем большая часть его массы расположена вдали от оси его вращения. Важно понимать, что момент инерции не является однозначной характеристикой тела (как, например, масса тела). Для одного и того же тела он будет разным для разных осей вращения. У однородных тел правильной геометрической формы для момента инерции относительно осей симметрии этого тела, а они обязательно проходят через центр тяжести тела, можно, используя выражение (6), получить простые формулы для расчета J. (Правда, для этого надо знать приемы интегрального исчисления.). Так, например, момент инерции цилиндра относительно его оси симметрии вычисляется по формуле 1 J = mR 2 , (7) 2 где m - масса цилиндра, а R - радиус цилиндра. Момент инерции тонкого стержня относительно оси, проходящей через его центр перпендикулярно стержню, вычисляется так 1 J = ml 2 , (8) 12 где l - длина стержня, а m - его масса. Следует подчеркнуть еще раз, что такие достаточно простые формулы для J получаются только в том случае, когда ось вращения совпадает с осью симметрии тела, проходящей через центр масс. (Последнее выполняется автоматически, если тело однородно, т.е. плотность его одинакова во всех точках.) Если необходимо определить момент инерции относительно оси, которая параллельна оси, проходящей через центр масс, то используется теорема о переносе осей (теорема Штейнера). Математическая запись этой теоремы такова J = J C + md 2 . (9) В этом выражении J -момент инерции относительно произвольной оси, JС - момент инерции относительно оси, параллельной данной, но проходящей через центр масс тела, d -расстояние между осями, m - масса тела. Так, например, в соответствии с теоремой Штейнера момент инерции цилиндра относительно оси параллельной оси симметрии цилиндра, но проходящей через его край равен PDF created with FinePrint pdfFactory trial version www.pdffactory.com 1 3 J = mR 2 + mR 2 = mR 2 (10) 2 2 а момент инерции тонкого стержня относительно оси, проходящей через конец стержня, перпендикулярно самому стержню, равен 2 1 1 l J = ml 2 + m = ml 2 (11) 12 3 2 2. В общем случае, когда тело не симметрично, момент инерции приходится измерять, как измеряют, например, массу тела. Но если для измерения массы пользуются весами, то для измерения момента инерции подобного прибора не существует. Поэтому при определении момента инерции используют наблюдения какоголибо движения, одна из характеристик которого определенным образом зависит от величины момента инерции. Движением, зависящим от момента инерции, в нашей работе являются крутильные колебания. Такие колебания совершает тело, прикрепленное к нити или стержню, если ее (нить) подвергнуть деформации кручения. Известно, что когда колеблется тело, подвешенное на пружине (тело в этом m случае движется поступательно), то период колебаний T = 2π , где m - масса тела k и k - жесткость пружины при деформации сжатия и растяжения. При крутильных колебаниях тело как бы совершает незавершенное вращение. Поэтому в формулу для периода крутильных колебаний T надо вместо массы подставить момент инерции J, а в вместо жесткости k - жесткость по отношению к деформации кручения µ. Таким образом, формула для периода крутильных колебаний приобретает вид J T = 2π . (12) µ Формула (12) в принципе позволяет определить момент инерции J из измерений периода крутильных колебаний T, однако такой способ определения J практически не используют, поскольку значение µ известно обычно с очень большой погрешностью. Погрешность, связанную с неопределенностью µ, можно исключить, если применить метод крутильных колебаний для определения отношения. моментов инерции, один из которых известен очень точно. На самом деле, пусть к нити прикреплено некоторое тело, имеющее известный момент инерции J0 относительно оси крутильных колебаний (т.е. нити). Период крутильных колебаний такого тела равен J0 T0 = 2π . (13) µ Если к первому телу прикрепить другое тело, момент инерции которого относительно оси колебаний равен J, то момент инерции такого составного тела будет равен сумме J+J0. Соответственно измениться и период колебаний T такой системы J + J0 T = 2π . (14) µ PDF created with FinePrint pdfFactory trial version www.pdffactory.com Разделив (14) на (13), найдем J + J0 T = . Отсюда T0 J0 J = J0 T 2 − T0 2 2 (15) T0 Величины, стоящие в правой части этой формулы, можно измерить с высокой точностью, следовательно, значение J, рассчитанное по формуле (15) тоже определяется с высокой точностью. МЕТОДИКА ЭКСПЕРИМЕНТА Установка для измерения момента инерции методом крутильных колебаний представляет собой, собранные на массивном основании колонку для крепления исследуемых тел и миллисекундомера. На колонке укреплены три кронштейна. Верхний и нижний кронштейны имеют зажимы, служащие для закрепления тонкой стальной проволоки, к которой прикрепляется рамка с платформой в виде тонкого диска. Момент инерции рамки с платформой относительно оси колебаний J известен (его значение приведено на установке). Конструкция рамки позволяет размещать на платформе различные тела, момент инерции которых подлежит измерению. На среднем кронштейне закреплена плита, которая служит основанием фотодатчику, угловой шкале и электромагниту, который можно перемещать по плите. Его положение относительно фотодатчика отсчитывается по угловой шкале. На лицевой панели миллисекундомера находятся два цифровых табло, на одном из которых высвечивается число периодов колебаний, совершенных рамкой, а на другом - время ,в течение которого эти колебания совершаются. Кроме того, на лицевой панели находятся управляющие клавиши: - клавиша "Cеть" - выключатель сети. При нажатии этой клавиши на двух цифровых табло должны высвечиваться нули, а также должна гореть лампочка фотодатчика; - клавиша "Сброс" - сброс показаний секундомера. Нажатие этой клавиши вызывает обнуление показаний секундомера и генерирование сигнала, разрешающего измерение; - клавиша "Стоп" - окончание измерений. При нажатии этой клавиши генерируется сигнал на окончание счета времени; - клавиша (или тумблер) "Пуск" - управление электромагнитом. Нажатие этой клавиши вызывает отключение тока, питающего электромагнит. При нажатии клавиши "Сеть" секундомер устанавливается в начальное состояние (нули на индикаторах) и блокируется схема формирования импульсов. Эта блокировка снимается сигналом, который вырабатывается при нажатии клавиши "Сброс". Нажатие клавиши "Пуск" освобождает электромагнит и начинаются крутильные колебания маятника. В момент первого прерывания светового потока падающего на фототранзистор от лампочки, генерируется электрический импульс, который подключает к счетчику времени кварцевый генератор. Счетчик подсчитывает число импульсов, следующих с кварцевого генератора с частотой 10 кГц. Одновременно другой счетчик подсчитывает каждый (следующий после первого) нечетный импульс. Прохождение каждого такого нечетного импульса соответствует одному колебанию и показание цифрового табло счетчика периодов изменится на единицу. PDF created with FinePrint pdfFactory trial version www.pdffactory.com При нажатии клавиши "Стоп" формируется сигнал, который подготавливает схему к концу счета. Полностью счет прекращается в момент генерации фотодатчиком очередного нечетного импульса. При этом на цифровом табло высвечивается число колебаний и время, в течении которого они совершались. Погрешность измерения времени составляет 0,02%. Таким образом, методика измерения момента инерции тела относительно оси вращения крутильного маятника сводится к следующему. Перед началом измерений следует убедиться в применимости формулы (15), которая справедлива только для малых колебаний. После этого надо измерить период колебаний пустой платформы Т0 и период колебаний Т платформы, с укрепленным на ней телом. Затем рассчитать J тела относительно оси вращения по формуле (15). Описанная методика пригодна для измерения момента инерции относительно оси колебаний крутильного маятника тела произвольной формы. В данной работе этот метод используется для определения J тел, обладающих цилиндрической симметрией. Кроме того, этот метод позволяет, используя теорему о переносе осей, определить массу тела. Для этого надо экспериментально определить величину J тела, располагая его на платформе так, чтобы ось тела находилась на некотором известном расстоянии от оси вращения. Проведя такие опыты при разных расстояниях между осями, надо построить график зависимости величины J от квадрата расстояния, то есть от величины d2. В таких координатах зависимость J от d2, согласно теореме о переносе осей (9), представляет собой прямую линию. Если по экспериментальным точкам "на глаз" провести "наилучшую прямую" (строго это делается так называемым методом наименьших квадратов), то величина тангенса угла наклона даст значение массы тела, а величина отсекаемой на оси ординат части даст величину JC. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ 1. Включить прибор нажатием клавиши "Сеть". Нажать кнопку "Сброс". При этом индикаторы измерителя должны высвечивать нули. Закрепить электромагнит в некотором положении и при помощи его зафиксировать рамку с платформой. 2. Убедиться в том, что колебания крутильного маятника слабозатухающие. Для этого, нажав последовательно кнопки "Сброс" и "Пуск", определите число колебаний N, в течение которых амплитуда их уменьшиться в 2-3 раза. Если N ≥ 10, то затухание мало, следовательно, при расчете J можно пользоваться формулой (15). Измерение N провести для пустой платформы и для платформы с помещенным на ней телом. 3. Определить время t0, в течение которого рамка с пустой платформой совершит N колебаний (например, N=10). Очевидно, что T0=t0/N. Данные занести в таблицу. Рассчитать среднее значение T0, случайную и систематическую погрешности. 4. Установить на платформу исследуемый образец так, чтобы его ось совпадала с ось колебаний маятника. Измерить период колебаний T, также как в пункте 3. По формуле (15) определить момент инерции тела относительно этой оси. Рассчитать погрешность величины J. 5.Установить на платформу образец так, чтобы его ось не совпадала с ось колебаний. Измерить расстояние между осями. Измерить период колебаний системы и определить момент инерции. PDF created with FinePrint pdfFactory trial version www.pdffactory.com 6. Повторить пункт 5 при разных расстояниях между осью тела и осью колебаний. 7. По экспериментальным данным построить график зависимости J от d2. Определить из графика величины JC и m. Сравнить их с результатами других измерений. ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА Значение момента инерции, измеренное методом крутильных колебаний, является результатом косвенных измерений. Формула для расчета погрешности ∆J имеет следующий вид: 2 2 4T 2 ∆T0 ∆T 2 + + 2 T T − ( T T ) 0 0 Подставляя в эту формулу случайную, а затем систематическую погрешности прямых измерений, рассчитываются случайная и систематическая погрешности величи- ∆J ∆J = J 0 J0 ны J соответственно. Полная погрешность равна ∆J = (∆J )2 + (∆ C J ) 2 При построении графика J от d2 эта величина определяет размер экспериментальной точки по вертикали. Размер точки по горизонтали определяет погрешность величины d2, которая равна 2∆d, т.е. удвоенной погрешности прибора. Теперь можно изобразить график экспериментальной зависимости J от d2. Для этого следует построить экспериментальные точки и по ним провести "наилучшую прямую". Это нетрудно сделать, наложив на график прозрачную линейку и, передвигая ее, получить такую прямую, к которой экспериментальные точки лежат ближе всего. Проведя эту прямую, можно определить тангенс угла наклона ее относительно оси абсцисс и отсекаемую на оси ординат часть. Согласно формуле (9) первая величина равна массе тела, вторая - моменту инерции относительно оси, проходящей через центр масс тела. В заключении надо сравнить полученное значение массы с величиной массы тела, измеренной при помощи весов, а полученное значение JC с величиной момента инерции, вычисленной по формуле (7). Для этого, очевидно, но надо измерить диаметр тела. PDF created with FinePrint pdfFactory trial version www.pdffactory.com