Lotka Volterra (A const, AX k0 2X, XY k1 2Y, X k2 D, Y k3 E).
advertisement
.")
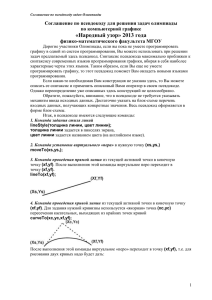
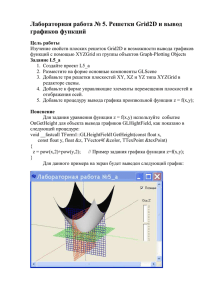
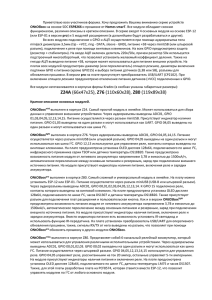
Провести численный расчет кинетики реакции Лотки-Вольтера A= const, A +X →k0 2X, X +Y →k1 2Y, X →k2 D, Y →k3 E, получить в символьном виде выражения для стационарных решений и собственных значений для системы дифференциальных уравнений описывающей изменение концентраций X и Y. Определить частоту колебаний используя быстрое преобразование Фурье. Построить качественный фазовый портрет системы ДУ с помощью векторного графика. dA (1) = k4 - k0AX = 0 k0 k2 A + X ¾¾ 2X X ¾¾ D dt A = const Система ДУ соответствующая рассматриваемой схеме имеет вид: k1 k3 dX X +Y ¾¾ 2Y Y ¾¾ E (2) = k0AX - k1XY - k2X dt dY ( 3) = k1XY - k3Y dt dD dE (4 ) = k2X (5) = k3Y dt dt Для выяснения особенностей кинетики данной реакции достаточно рассмотреть подсистему из (2) и (3) уравнений, поскольку продукты D и E далее ни в каких реакциях не учавствуют. Стационатные решения Найдем стационарные решения системы (2) и (3) уравнений : Given k0 A0 X k1 X Y k2 X = 0 k1 X Y k3 Y = 0 0 k3 k1 Find ( X Y) 0 0 Стационарных решений оказалось два, одно из которых Xst = Yst = 0 - тривиальное Собственные значения Для анализа на устойчивость этих решений необходимо определить собственные значения линеаризовнной системы ДУ для малых отклонений от стационарных решений. Линеаризуем систему при небольшом отклонении от стационарного состояния, произведя замену в правых частях уравнений (2) и (3) X -> Xst + ΔX и Y -> Yst + ΔY и убрав квадратичные члены по ΔX и ΔY. substitute X = Xst ΔX k0 A0 X k1 X Y k2 X substitute Y = Yst ΔY Xst k2 A0 k0 Yst k1 Xst k1 ΔY ΔX k2 A0 k0 Yst k1 k1 ΔX ΔY series ΔX ΔY Xst k2 A0 k0 Yst k1 Xst k1 ΔY ΔX k2 A0 k0 Yst k1 - линеаризованная правая часть уравнения (2) substitute X = Xst ΔX k1 X Y k3 Y substitute Y = Yst ΔY Yst k3 Xst k1 ΔY k3 Xst k1 Yst k1 ΔX k1 ΔX ΔY series ΔX ΔY Yst k3 Xst k1 ΔY k3 Xst k1 Yst k1 ΔX - линеаризованная правая часть уравнения (3) Теперь для каждой стационарной точки в линеаризованные правые части уравнений (2) и (3) вместо Xst и Yst подставим стационарные решения. Для первой стационарной точки (Xst -> 0, Yst -> 0) имеем: Xst k2 A0 k0 Yst k1 Xst k1 ΔY ΔX k2 A0 k0 Yst k1 Yst k3 Xst k1 ΔY k3 Xst k1 Yst k1 ΔX substitute Xst = 0 A0 k0 ΔX k2 ΔX substitute Yst = 0 substitute Xst = 0 k3 ΔY substitute Yst = 0 ( ) DX = [ A ]0 k0 - k2 ⋅ DX + 0 ⋅ DY DY = 0 ⋅ DX - k3 ⋅ DY Составляем характеристическое уравнение |a11 -λ a12 | | a21 a12 -λ| =0 и находим его собственные значения. В Mathcad это можно легко сделать с помощью функции eigenvals(): k3 k0 A0 k2 0 0 k3 A0 k0 k2 eigenvals Аналогично для второй стационарной точки (Xs -> k3/k1, Ys -> (k0*A0-k2)/k1): Xst k2 A0 k0 Yst k1 Xst k1 ΔY ΔX k2 A0 k0 Yst k1 Yst k3 Xst k1 ΔY k3 Xst k1 Yst k1 ΔX substitute Xst = substitute Yst = substitute Xst = substitute Yst = k3 k1 k0 A0 k2 k3 ΔY k1 k3 k1 k0 A0 k2 k1 A0 k0 ΔX k2 ΔX DX = 0 ⋅ DX - k3 ⋅ DY DY = ([A]0 k0 - k2 ) ⋅ DX - 0 ⋅ DY k3 k2 A0 k0 0 k3 k0 A0 k2 0 k3 k2 A0 k0 eigenvals Итак, для первой стационарной точки (0,0) λ 1 = -k3, λ 2 = A0*k0-k2, для второй (k3/k1, (k0*A0-k2)/k1) λ 1 = (k3*(k2-A0*k0))1/2 , λ 2 = -(k3*(k2-A0*k0))1/2 . В случае когда k2 < A0*k0 первая стационарная точка оказывается неустойчивой т.к. λ 2 > 0, а в окрестности второй возможны осцилляции, причем как мы ниже убедимся они будут незатухающими с частотой 2π/|Im(λ 1 )|. В случае k2 > A0*k0 первая стационарная точка оказывается устойчивой т.к. λ 1 < 0 и λ 2 < 0, а вторая соответствует физически неосуществимому состоянию [Y] < 0. Теперь перейдем к численному расчету и получим решение для произвольных начальных концентраций X и Y (т.е. не при не обязательно малых отклонений [X] и [Y] от стационарных значений). Убедимся также в правильности теоретических предсказаний. dX = k0AX - k1XY - k2X dt dY = k1XY - k3Y dt Численный расчет Зададим константы скоростей k0 1 k1 .5 k2 .01 k3 2 A0 1 Если при заданных выше значениях констант и A0 условие колебаний k0 A0 1 > k2 0.01 выполняется, то концентрации X и Y будут испытывать колебания вокруг второй стационарной точки k3 0 k1 0 4 XYst k0 A0 k2 0 1.98 0 k1 0 0 XYst 0 1 XYst 4 1.98 Чем ближе ко второй стационарной точке выбрать начальные концентрации веществ X и Y, тем более синусоидальный вид будут иметь колебания концентраций. В пределе малых колебаний их частота будет равна νsmall Y0 Im k3 ( k2 A0 k0) 2π 1 0.22395 , а период Tsmall 4.46527 . νsmall X0 1 Y0 1 X0 1 Y0 1 tb 0 te 300 - начальное и конечное время интегрирования Вектор правых частей ДУ: Sys ( t Y) 15 N 2 k0 A0 Y0 k1 Y0 Y1 k2 Y0 k1 Y0 Y1 k3 Y1 1 32767 Матрица решения: 0 t M 1 X M 1 -X 2 -Y - число точек решения на интервале (tb, te] Задаем в таком виде для того, чтобы иметь возможность воспользоваться в дальнейшем быстрым преобразованием Фурье! M Rkadapt ( Y0 tb te N Sys) 2 Y M - дискретные значения времени и концентраций веществ X и Y в эти моментв времени График численного решения: Фазовая траетрория решения: Y 10 X 6 XYst 4 1 1 2 Y 5 0 5 10 X XYst 0 1 0 100 200 300 t Частота осцилляций Частоту осцилляций можно определить как непосредственно из приведенного выше графика, так и используя быстрое преобразование Фурье. fs N te 109.22333 - частота дискретизации (sampling frequency) = 1/dt nν 0 N 1 N 1 2 2 16384 νnν nν fs N 1 fs 0.00916 t1 0.00916 - частоты, соответствующие nν компаненте Фурье спектра ff fft ( X) 300 200 Im ff nν На графике также видны 2 - я и последующие гармоники, поскольку колебания носят отличный от синусоидального характер. 100 max Im ( ff) 251.30475 0 0.5 1 ν nν Ν lookup max Im ( ff) Im ( ff) ν 0 0.18667 - частота осцилляций Заметим, что c ростом амплитуды колебаний их частота уменьшается: Ν 0.18667 < νsmall 0.22395 . 1 te 0.00333 ν1 0.003333 - точность измерения частоты Фазовый портрет Представление о фазовом портрете рассматриваемой системы ДУ (кривых Y(X) при различных начальных условиях) можно получить с помощью векторного графика, показывающего направление и скорость изменения X и Y (вектор с компонентами (dX/dt;dY/dt)) в различных точках плоскости XY. xlow 0 xhigh 2 XYst xn 20 ylow 0. yhigh 2 XYst yn xn 0 1 1 1 i 0 xn 1 xindi xlow i j 0 yn 1 yindj ylow j xindi 0 yindj gXi j Sys 0 ( gX gY) xhigh xlow xn 1 yhigh ylow yn 1 xindi 1 yindj gYi j Sys 0 Направление маленьких стрелок на предыдущем графике можно лучше расмотреть, если пронормировать вектора: gXni j gXi j gXi j2 gYi j 2 gYni j gYi j gXi j2 gYi j 2 ( gXn gYn) Чтобы получиить точный фазовый портрет решений необходимо изобразить множество зависимостей Y(X) при различных начальных условиях. Фазовая диаграмма Подробное объяснение построения фазовой диаграмы приводится в задаче о Брюсселяторе. Здесь мы построим ее без объяснений, записав правые части СДУ с использованием стехиометрической матрицы α (Stoichiometric Matrix) и вектора скоростей реакций R. A = const k0 (1) A + X ¾¾ 2X k1 (2) X +Y ¾¾ 2Y k2 (3) X ¾¾ D k3 (4) Y ¾¾ E N 2047 nx 7 1 T 1 Z α 1 0 1 1 1 1 0 α R ( k XY) 0 0 1 0 1 1 k3 k0 0 k1 k1 0 4 k XYst k2 k 0 A0 k 2 0 1.98 0 k1 k3 te 1.5 Tsmall 6.6979 ny 5 xb 0.9 yb 0.3 0 1 for i 0 nx 1 v 0 jnx i i v 1 jnx i j ye 2 XYst 1 1 0 xe xb nx 1 ye yb ny 1 xb 1 2 3 3.26667 4.45 5.63333 6.81667 8 1 0.3 0.3 0.3 0.3 0.3 0.3 ... 0 yv Z q ( k y ) 3 z2 q ( k y ) y i yv 2 1 z1 stack ( z1 z2) z1 0 6 2.08333 q ( k C0 ) Rkadapt ( C0 tb te N E ( k ) ) 5 0.9 yb z1 Z 4 0 2 4 x 6 8 XY0 k0 XY0 k2 XY0 XY1 k1 XY0 XY1 k 1 XY1 k 3 dX = k0AX - k1XY - k2X dt dY = k1XY - k3Y dt v 0 E ( k t Y) α R ( k Y) T 1 for i 1 last v α R ( k XY) 3.96 v U k0 A0 XY0 k1 XY0 XY1 k 2 XY0 k 3 XY1 tb 0 xe 2 XYst for j 0 ny 1 v 0