о движении замкнутых систем, или при каких условиях не
advertisement

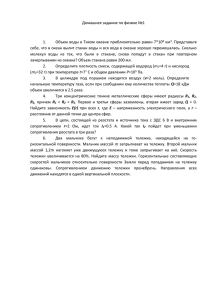
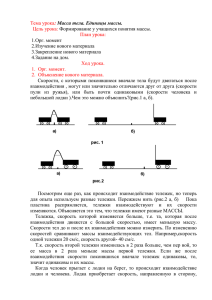
О ДВИЖЕНИИ ЗАМКНУТЫХ СИСТЕМ, ИЛИ ПРИ КАКИХ УСЛОВИЯХ НЕ ВЫПОЛНЯЕТСЯ ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА Турышев М.В. В рамках традиционной (эйлеровой) классической механики, будет показано что, возможно движение так называемых замкнутых механических систем за счет внутренних сил, что законы сохранения импульса и момента импульса имеют ограниченную сферу действия, а реальную природу отражает закон сохранения действия (мгновенной мощности) или креатона. Многие энтузиасты делали попытки (и не мало успешно) доказать, что движение замкнутых систем посредством внутренних сил возможно, например Пехотин И.Е. и Витко А.В. [1-2]. В данной работе процессы действия тел друг на друга будут рассматриваться с двух позиций – традиционной и ньютоновской. Результаты теории и эксперимента подробно приведены в [3-4]. Известно, что при качении тел по наклонной поверхности без проскальзывания полые и сплошные тела с равными массами (их масса определяется взвешиванием) и диаметрами движутся с разными ускорениями aCспл > aCпол , в то время как при этом на оба цилиндра одновременно действуют равные силы. Хотя при скольжении по той же поверхности их ускорения равны. По логике традиционной механики, при действии на тела с равными массами (весом) равных сил имеем: F =m a пол пол C =m a спл спл C aCспл m пол и пол = спл , aC m (1) но измеренные экспериментально ускорения не равны aCспл > aCпол , тогда и инертные массы то же не равны и m пол >mспл . Что бы разобраться в этом вопросе будем скатывать цилиндры, как это показано на рис. 1. Δaсистема C C a ϕ спл C a Cп ол ϕ Рис. 1. Полый и сплошной цилиндры равные по массе (весу) и диаметру закрепим между собой нитью и разместим на вершине. Далее пережигаем нить, и цилиндры скатываются по наклонным плоскостям в противоположных направлениях и ударяются в бортики тележки. В серии опытов цилиндры меняли местами, но всегда тележка после ударов цилиндров смещалась в сторону движения сплошного цилиндра. 2 Любой экспериментатор может провести элементарные опыты с тележками. Для этого необходимо изготовить две тележки равные по массе (по весу) и установить на них равное число полых (на первой тележке) и сплошных (на второй тележке) колесцилиндров равных по размеру и весу. Далее надо установить тележки, как показано на рис. 2, на стол и соединить их нитью. mA = mB a A >a B Рис.2. К каждой из них крепим нить и привязываем равные по весу грузы. Опускаем грузы и пережигаем нить и убеждаемся в том, что тележка А со сплошными колесамицилиндрами доедет до края стола раньше, чем тележка В с полыми колесамицилиндрами. Автор изготовил механическую систему изображенную на рис. 3. ΔF = m(aCспл − aCпол ) Fспл = ma спл C ΔF Δa = ΔF mсис Fпол = maCпол Δa aCспл F C F aCпол Рис. 3. Она состоит из трех тел – тележки на роликах и двух цилиндров с равными массами (весом) m и радиусами R. Один из цилиндров является полым, а другой – сплошным. Цилиндры расположены симметрично относительно центра масс тележки С. Тележка по краям имеет бортики высотой равной диаметру цилиндров. В центре масс всей системы установлен пружинный механизм, толкающий цилиндры в противоположные стороны с равными силами F . Коэффициенты трения для цилиндров равны, т.к. их поверхности имеют одинаковые пары материалов. На систему не действуют внешние силы. На цилиндры за время Δt действуют равные внутренние силы F со стороны механизма. Под действием этих сил цилиндры катятся по поверхности тележки в 3 противоположных направлениях. Силы трения равны и направлены противоположно. В результате действия пружинного механизма цилиндры ударялись о борта тележки, и она всегда перемещалась в сторону движения сплошного цилиндра. Рассмотрим общий случай действия силы на тела вращения. Движение однородных тел вращения радиуса R и массы m происходит по горизонтальной плоскости без скольжения. В начальный момент тело покоится. Найдем линейное ускорение центра масс (инерции) тела aC . Применим уравнение моментов относительно мгновенной оси вращения, проходящей через точку K (точка соприкосновения тела с поверхностью). Поскольку эта точка в каждый момент времени неподвижна, то сила трения будет силой трения покоя. Уравнение моментов имеет простую форму IK dω = F ⋅l , dt (2) где I K = I C + mR 2 – момент инерции тела относительно мгновенной оси, проходящей через точку K ; I C – момент инерции тела относительно оси, проходящей через центр масс C ; dω – угловое ускорение; l – плечо силы F . dt Решая уравнение (2) относительно линейного ускорения центра масс тела имеем: aC = F l⋅R l⋅R = aП ⋅ m , 2 I C + mR I C + mR 2 (3) где aП – ускорение поступательного движения тела в случае действия силы F приложенной к его центру масс. При качении тела под действием силы F линейное ускорение имеет существенную зависимость от плеча силы l и более мягкую от пространственного распределения массы тела относительно его центра инерции (от момента инерции тела I C = γ mR 2 , где γ – число, характеризующее степень инертности тела при их вращении вокруг центра инерции.) (рис. 4). Как видно из графиков (рис.4) наибольшая разница линейных ускорений цилиндров aCспл − aCпол будет при значении плеча силы l = R . Уравнение движения можно записать в виде: F = aC ⋅ I C + mR 2 I + R2 = m⋅ C aC . l⋅R m⋅l ⋅ R (4) Определим теперь результат действия внутренних сил ΔF = Fспл − Fпол = m(aCспл − aCпол ) на тележку (замкнутую систему). Линейные ускорения для полого и сплошного цилиндров равны: 4 aС a П 10 aП − aCспл 8 aCспл − aCпол сплош ной 6 aП − aCпол цилиндр 4 полы й цилиндр 2 l 0 0 2 4 6 8 10 R Рис. 4. для сплошного цилиндра – ( I спл = 0,5mR 2 , γ = 0,5) – aCспл = для полого цилиндра – ( I пол = mR 2 , γ = 1) – aCпол = F F ≈ 0, 67 m 1,5m (5) F F = 0,5 . m 2m (6) Откуда следует, что aCспл > aCпол . Здесь и далее для простоты мы приняли момент инерции полого цилиндра равным I пол = mR 2 , хотя точное значение равно I пол = 0,5m( R 2 + r 2 ) , где r это внутренний радиус цилиндра, который мы считаем равным внешнему R = r . И так, в результате действия равных между собой внутренних сил F цилиндры, имеющие равные массы, за один и тот же промежуток времени приобретают разные по величине линейные ускорения центров масс, а соответственно и скорости при ударе о бортики передают тележке результирующий импульс отличный от нуля и направленный в сторону движения сплошного цилиндра. Результирующая сила, действующая на замкнутую систему (тележку) будет равна F F⎞ ⎛ ΔF = m ( aCспл − aCпол ) = m ⎜ 0, 67 − 0,5 ⎟ = 0,17 F . m m⎠ ⎝ (7) Неравнозначное действие цилиндров на бортики тележки создает внутреннюю силу тяги ΔF равную 17% от внутренней силы F . Еще большего эффекта мы добились, когда один из цилиндров перемещался только поступательно (без вращения) и имел линейное ускорение aП = F m (8), а другой – полый катился по поверхности тележки. В этом случае разница линейных ускорений aП − aCпол будет максимальной для данной системы (см. рис.4). Разница между ускорениями существенно возросла ( aпост =2 aCпол ) и сила тяги действующая внутри на замкнутую систему равна: F⎞ ⎛F ΔF = m ( aП − aCпол ) = m ⎜ − 0,5 ⎟ = 0,5F . m⎠ ⎝m (17) 5 Неравнозначная реакция цилиндров на действие равных внутренних сил F далее приводит их к действию на бортики тележки, что создает внутреннюю силу тяги ΔF равную 50% от величины внутренней силы F . Очевидно, что, меняя местами цилиндры (поворачивая платформу тележки на 180°) можно непрерывно двигать ее в одном направлении, посредством только внутренних сил. Такое устройство было изготовлено и успешно двигалось без привода на колеса по горизонтальной поверхности и на крутильных весах. Таким образом, основываясь только на втором законе традиционной механики и уравнении моментов, мы получили теоретически и экспериментально результат, противоречащий закону сохранения импульса – замкнутая система движется за счет работы внутренних сил. В другом опыте под действием равных по величине сил упругости пружины F = Fупр (рис. 5.), полый и сплошной цилиндры, равные по массе (по весу) и помещенные внутрь жестких одинаковых коробок, которые установлены на идентичных роликах, приобретают разные (не равные) по величине линейные ускорения aCспл >aCпол . Далее коробкам в результате соударения передается действие от цилиндров. aCспл aCпол F F F спл F пол Рис. 5. Они давят на пружинные динамометры с силами F спл >F пол и динамометры фиксируют не равные силы действия со стороны коробок F спл >F пол . Таким образом, действие пружины равными силами F на коробки посредством цилиндров имеющих равные массы (вес) приводит к не равным силам действия коробок F спл >F пол и реакции со стороны динамометров. Как видим, при опосредованном (через разные тела) действии равными силами, возможно, получить не равные реакции. Пружины динамометров сжатые на не равные расстояния x спл >x пол , соответственно при разжимании будут спл пол >Fупр ), что приводит к не толкать коробки с разными (не равными) силами ( Fупр равным противодействиям (реакциям) с их стороны. 6 Рассмотрим, что будет происходить при взаимодействии тел, которые имеют возможность свободно вращаться без качения по поверхности. Для этого была изготовлена механическая система, показанная на рис. 6., состоящая из двух одинаковых тележек со свободно вращающимися на оси сплошными (и полыми) цилиндрами, размещенными на большой тележке, в центре которой закреплен пружинный механизм для выброса шариков равных по массе и размеру pсистема = mЦ (vП − vC ) v v vП vC vсистема ω Рис. 6. В исходном состоянии пружина сжата и закреплена нитью, ось одного из цилиндров свободно вращается, а другого зафиксирована и флажки на цилиндрах расположены вертикально. На всю систему не действуют внешние силы. При пережигания нити пружина разжимается и выбрасывает шарики с равными скоростями в противоположных направлениях. Они ударяются по флажкам на цилиндрах. После ударов тележки с цилиндрами перемещаются в противоположных направлениях и соударяются с бортами большой тележки. Вся система перемещается в сторону движения тележки с цилиндром, который не вращается. После действия шариков имеющих равные импульсы на цилиндры, левый цилиндр будет одновременно вращаясь вокруг оси совершать поступательное движение с тележкой, тогда как правый будет двигаться только поступательно вместе с тележкой. Так как в результате таких взаимодействий вся система смещается вправо, следовательно, импульс, который получает правый цилиндр больше чем левый. Это легко показать, используя закон сохранения кинетической энергии. Пусть кинетическая энергия каждого из шариков равна E = 0,5mv 2 , где m – масса шарика, v – скорость шариков, приобретенная под действием пружины. В нашем случае массами тележек mТ по отношению к большим массам цилиндров mЦ можно пренебречь т.к. mЦ mТ . Тогда кинетическая энергия правой тележки (с не вращающимся цилиндром), полученная от шарика будет равна E = 0,5mЦ vП2 . Для левой тележки (со свободновращающимся цилиндром) она будет равна E = 0,5mЦ vС2 + 0,5 I Cω 2 (где I C – момент инерции цилиндра относительно оси вращения, проходящей через его центр масс; ω – угловая скорость 7 вращения цилиндра). Приравняем эти выражения для кинетической энергии тележек и получим: 0,5mЦ vП2 = 0,5mЦ vС2 + 0,5 I Cω 2 . Момент инерции представим в общем виде I C = γ mЦ R 2 , тогда для уравнения энергий будет иметь следующий вид: 0,5mЦ vП2 = 0,5mЦ vС2 + 0,5γ mЦ R 2ω 2 . После упрощений мы получим следующее уравнение: 2 (где vлин = ω R – линейная скорость). Откуда следует, что vП2 = vС2 + γ R 2ω 2 = vС2 + γ vлин vП > vС , т.е. скорость правой тележки больше левой и их импульсы не равны mЦ vП > mЦ vС . На рис. 7. показана еще одна система, состоящая из двух одинаковых по массе небольших тележек. На них были размещены полые (можно и сплошные), равные по массе и размерам цилиндры, свободно вращающиеся вокруг своих продольных осей. pС pП C B A Рис. 7. Тележки с цилиндрами в свою очередь были установлены на большую по длине тележку. Пружину располагали над перегородкой и ее концы, посредством нитей соединяли с корпусом одной из малых тележек в точке A и намотали 1-2 витка нити на цилиндр другой малой тележки, закрепив ее на нем в точке B . Далее точки A и B соединяются между собой нитью ,при этом пружина была растянута. На данную замкнутую систему не действуют внешние силы. Далее пережигалась нить на участке AB и пружина сжималась. Силы упругости пружины действовали с равными силами в точках A и B , и под их действием тележка с точкой B перемещалась с одновременным вращением цилиндра, а другая двигалась поступательно (без вращения цилиндра). В результате действия малых тележек большая тележка перемещалась в сторону движения тележки с точкой A . Вся система может двигаться в одном направлении, если попеременно менять точки приложения сил (точки A и B ). Такая система совершала движение, находясь на одном из плеч крутильных весов. Прекрасной иллюстрацией не равной реакции одинаковых тел (маятника Максвелла) на одно и то же действие (их притяжение) может служить их взвешивание, как показано на рис. 8. На два одинаковых цилиндра действует равная сила тяжести 8 приложенная к разным точкам тел. При такой реакции тел вес и ускорение левого цилиндра (сила натяжения нити действует через его центр масс) в три раза больше, чем правого вращающегося цилиндра (сила натяжения нити приложена к его краю). TП = mg 1 Tвращ = mg 3 F = mg F = mg Рис. 8. Как известно из курса традиционной механики работа внешней силы над свободным телом в общем случае выражается следующим образом: A = Aпост + Aвращ = F ⋅ xC + F ⋅ l ⋅ ϕ , (18) где Aпост – работа силы F затраченная на поступательное перемещению тела на расстояние xC ; Aвращ – работа силы F затраченная на поворот тела на угол ϕ ; ϕ – угол поворота тела; xC – линейное смещение тела за время действия силы F ; l – плечо силы F , линия действия которого не проходит через центр масс (инерции) тела. Aпруж = F ⋅ xС + F ⋅ l ⋅ ϕ Aпруж = F ⋅ xП FП F FС F С l С xП xС ϕ xП FП = maП = F FС = m(aП − l ⋅ ε ) F = FП FC ϕ Рис. 9. На рис. 9 показаны два идентичных тела, на которые со стороны пружины действуют равные силы, имеющие разные линии действия. В этом случае реакции этих тел будут 9 разными. На левое тело действует сила упругости пружины F через его центр масс (инерции) и совершает над ним работу: Aпруж = F ⋅ xП . (19) Над правым телом пружина совершает работу равную: Aпруж = F ⋅ xС + F ⋅ l ⋅ ϕ . (20) Приравняем (19) и (20) получим F ⋅ xП = F ⋅ xС + F ⋅ l ⋅ ϕ и продифференцировав это уравнение по времени, получаем уравнение мощностей: F ⋅ vП = F ⋅ vC + F ⋅ l ⋅ ω = F ⋅ vC + F ⋅ vЛИН , (21) где vП – скорость поступательного движения тела, приобретенная в результате действия силы F через его центр масс (инерции); vC – скорость центра масс тела, приобретенная в результате действия силы F , линия действия которой не проходит через его центр масс (инерции); ω – угловая скорость тела, приобретенная в результате действия силы F , линия действия которой не проходит через его центр масс (инерции); vЛИН = l ⋅ ω . Делим левую и правую части уравнения (21) на F и получаем: vП = vC + vЛИН (22) и перемножив, левую и правую части этого выражения на m , мы получим уравнение импульсов: mvП = mvC + mvЛИН . (23) Как видим импульс mvП тела, который придается силой F , с линией действия проходящей через его центр масс, явно не равен импульсу mvC (на величину mvЛИН ) того же тела, на которое подействовала та же сила F , но с линией действия не проходящей через его центр масс. Таким образом, из (23) получается: pП = mvП ≠ pC = mvC , т.е. закон сохранения импульса в данном случае не выполняется. В работах Смирнова А.П. [5-8] сформулированы аксиомы и законы динамики реальных процессов в системах состоящих из взаимодействующих элементов. Опираясь на базис, заложенный И.Ньютоном, понимание закона взаимосвязи причины и следствия им корректно сформулированы все законы механики И.Ньютона. При этом главенствующее место занимает характеристика элементарного акта действия F ⋅ v – мгновенной мощности или креатона. В таком видении, смысл третьего закона И.Ньютона – «Действию всегда соответствует и равная реакция» – качественно отличается от традиционного, сформулированного Л.Эйлером. Его математическая форма: Fд vд = − Fр v р или D = − D р , (24) 10 где Fд – величина движущей силы; vд - скорость приложения силы Fд ; Fр – величина силы реакции; v р – скорость реакции; D – действие (креатон); D р – реакция. Хорошо видно, что уравнения (21) и (24) имеют один и тот же физический смысл – это закон сохранения действия (мгновенной мощности) или креатона, сформулированный еще великим И.Ньютоном как третий закон механики. Уравнения действия пружины на тела (рис. 8) теперь можно записать в / + Dвращ ) . следующем виде: для левого тела – Dпруж = − Dпоступ и правого – Dпруж = −( Dпоступ Становится совершенно ясно, что в процессе действия пружины на тела равные по размеру и массе, но с разным пространственным распределением вещества относительно их центров масс, последние будут проявлять разную (не равную) реакцию. Аналогично происходит процесс с идентичными телами, но с разными точками приложения к ним сил (действия). Сформулированный Р.Декартом закон сохранения импульса основан на измерениях только для поступательного движения тел при их взаимодействиях, когда кинетическая энергия поступательного движения одних тел полностью преобразуется в кинетическую энергию поступательного движения других. Это справедливо для очень ограниченной области динамики. Как было показано выше, аппарат традиционной механики давно позволяет учитывать при действии тел друг на друга их реакции, которые не соответствуют традиционной механике. В любых реальных процессах сохраняется действие, а не импульс или момент импульса тела. Второй закон И.Ньютона (уравнение движения) с учетом изложенного может быть записан следующим образом: F = m(aC + l ⋅ ε ) , (24) где aC – линейное ускорение центра масс тела; ε – угловое ускорение тела; l – плечо силы F . При ε = 0 уравнение (24) принимает традиционный вид: F = maC . Эксперименты и расчеты взаимного действия тел, проведенные автором (с учетом ньютоновского подхода) свидетельствуют о том, что: • истинным законом сохранения является закон сохранения действия, а не традиционные законы сохранения импульса или момента импульса , имеющие очень ограниченную область применения; • экспериментально можно осуществить взаимодействия тел, при которых не выполняются традиционные второй и третий законы механики; • замкнутые механические системы могут перемещаться за счет работы внутренних сил. Автор надеется, что данная работа послужит для стимулирования дальнейших более детальных исследований в области динамики. 11 Литература: 1. Пехотин И.Е., Пятый закон механики, М. «Информ - Знание», 1994. 48 с. 2. Витко А.В., Полет в аспектах науки,- М., МАИ, 1998. 448 с. 3. Турышев М.В., О движении замкнутых систем, или при каких условиях не выполняется закон сохранения импульса., «Естественные и технические науки», №3(29), 2007, ISSN 1684-2626. 4. Турышев М.В./ К вопросу о законе сохранения импульса., ООО «ВЕЛМА». Москва, 2007,-49 с.-ил.23-.рус. – Деп. в ВИНИТИ 12.03.07, №233-В2007. 5. Смирнов А.П., Научное видение золотого века. http://www.physicalcongress.spb.ru 6. Смирнов А.П., Выход из интеллектуального дефолта в науке, философии и сознании: новая научная парадигма. http://www.physical-congress.spb.ru 7. Смирнов А.П., Осознание знания – откровение ΧΧΙ века. http://www.physicalcongress.spb.ru 8. Смирнов А.П., Прокрустово ложе законов сохранения. http://www.physicalcongress.spb.ru