ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
advertisement

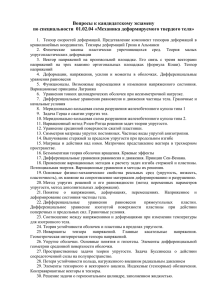
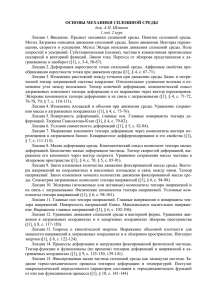
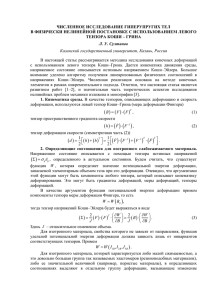
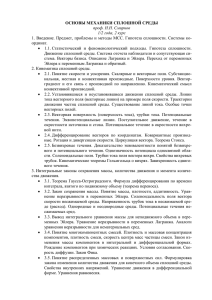
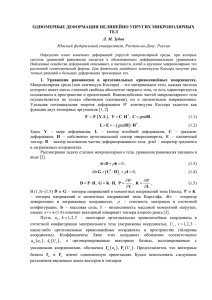
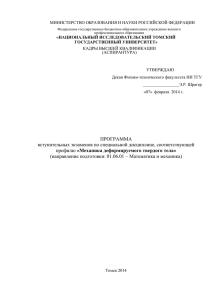
Пособие для подготовки курсовых проектов по курсу лекций ТЕПЛОФИЗИЧЕСКИЕ ОСНОВЫ СОВРЕМЕННЫХ МЕТОДОВ МЕТАЛЛООБРАБОТКИ Князева А.Г. 1 Содержание Часть 1 1.1. Тензор напряжений 1.2. Тензор деформаций 1.3. Основные уравнения теории упругости 1.4. Условия совместности деформаций 1.5. Уравнения Ламе 1.6. Уравнения Бельтрами 1.7. Плоские статические задачи теории упругости 1.8. Основные уравнения теории термоупругости 1.9. Основные уравнения массоупругости 1.10. Обобщенное плоское напряженное состояние Часть 2 Примеры решения частных задач 2.1. Простейшие задачи теории упругости 2.2. Напряжения в пластине 2.3. Напряжения в нагретом диске 2.4. Напряжения в цилиндре 2.5. Напряжения в шаре 2.6. Напряжения в составных телах 2.6.1. Составная пластина 2.6.2. Двухслойный цилиндр 2.7. Примеры заданий 2.7.1. Общие рекомендации 2.7.2. Задания 2.7.3. Пример выполнения работы Приложения Рекомендуемая литература 2 2 3 6 9 10 11 13 16 18 19 20 21 30 32 34 37 39 39 40 43 43 44 46 2 Часть 1 Общие соотношения 1.1. Тензор напряжений Важной гипотезой, служащей для механического описания внутренних сил в деформируемом теле, является принцип напряжений Коши и Эйлера: В каждом поперечном сечении, мысленно проведенном внутри тела, имеет место взаимодействие сил такого же характера, как и распределенных по поверхности нагрузок. Представим себе тело, находящееся в состоянии равновесия под действием внешних сил P1 , P2 ,... (рис. 1,а). Под действием внешних сил между частями тела возникают внутренние силы взаимодействия. Вообразим, что тело разделено на две части A и B поперечным сечением m - m , проходящим через произвольную точку O . Любая из частей тела находится в равновесии под действием внешних и внутренних сил, распределенных по поперечному сечению m - m и представляющих действие одной части материала на другую. Величины таких сил обычно определяют их интенсивностью, т.е. величиной силы, отнесенной к единице площади, на которую они действуют. Элемент поверхности dA с центром в точке O сечения m - m характеризуется единичным вектором нормали n , направленным к B. Действие части А в точке O на часть В можно представить вектором силы dP и в общем случае вектором момента dM . Если мы теперь будем непрерывно уменьшать величину элементарной площадки, на которую действует результирующая сила, то предельное значение dP dA = s(A) даст нам вектор напряжений σ n , действующий в поперечном сечении m - m в точке O или интенсивность силы. Предельное направление результирующей силы dP является направлением вектора напряжения в этой точке. В общем случае направление результирующей силы dP не совпадает с направлением нормали n к поверхности, на которую она действует, и вектор напряжений σ n может быть разложен на три составляющих – нормальную к поверхности и две касательные. а б Рис. 1. К определению тензора напряжений Очевидно, что через точку O можно провести бесконечное множество поверхностей (сечений) со своим направлением нормали и, следовательно, 3 определить бесконечное множество векторов напряжений σ n (O ) . Иными словами, каждому направлению в пространстве в произвольной точке O можно поставить в соответствие вектор напряжений. В теории напряжений показано, что бесконечное множество векторов напряжений не являются независимыми друг от друга. Они могут быть вычислены, если в точке O известны векторы напряжений для трех взаимно ортогональных площадок, проходящих через эту точку - σ1n , σ 2 n , σ 3n . В свою очередь, каждый из векторов напряжений может быть разложен на три составляющих (рис.1,б). Получающиеся 9 величин (по 3 для каждого вектора напряжений) и образуют тензор, называемый тензором напряжений и служащий для описания напряженного состояния в произвольной точке. Наглядное изображение компонент тензора напряжений, действующих на гранях элемента кубической формы, показано на рис. 2. Девять компонент тензора напряжений могут быть представлены матрицей é s11 s12 ês ê 21 s 22 êës 31 s 32 s13 ù s 23 úú . s 33 úû Первый индекс у компонент тензора соответствует номеру координатной поверхности, Рис. 2. К определению компонент тензора второй – направлению напряжений действия. Величины s11 , s 22 , s 33 есть нормальные напряжения; s12 , s32 , s13 ,... касательные, для которых часто используют иные обозначения t11 , t 22 , t33 ,…. 1.2. Тензор деформаций От приложенной нагрузки тело деформируется. Пусть тело V , содержащее точку P до деформации, после деформации переходит в тело V * . При этом Точка P переходит в точку P*. Перемещение определим как разность радиус-векторами R и r, соответствующими этим точкам PP * = OP * - OP . или u = r -R, где u - вектор перемещений с компонентами u1 , u 2 , u 3 . Компонента вектора перемещений положительна, если ее направление совпадает с направлением 4 соответствующей координатной оси. Для каждой компоненты этого вектора, очевидно, имеет место равенство ui = xi - X i , i = 1, 2,3 . Перемещение точки Q, расположенной в некоторой малой окрестности точки P, в общем случае не будет совпадать с перемещением точки P. Эти перемещения будут отличаться на некоторую малую величину du. u(r + dr ) = u(r ) + du , где r + dr - радиус-вектор (на рисунке не Рис. 3 К определению показано), соответствующий точке Q*, в деформаций которую после деформации перемещается точка Q. Для каждой компоненты вектора смещения имеем (1) ui (r + dr ) = ui (r ) + dui . Вектор du называют вектором относительного смещения. Представим компоненты вектора u(r + dr ) в виде ряда Тейлора относительно компонент вектора u(r ) с точностью до слагаемых второго порядка малости: ui (r + dr ) » ui (r ) + 3 å k =1 ¶ui ¶u dxk º ui (r ) + i dxk , ¶xk ¶xk (2) Относительные смещения малы по сравнению с абсолютными значениями смещений: ¶ui ¶xk << 1 Сравнивая (1) и (2), находим ¶u dui = i dxk = Aik dxk , ¶xk где Aik - компоненты тензора относительной деформации точки Q относительно точки P или компоненты тензора дисторсии Представим тензор дисторсии в виде суммы двух тензоров: 1 1 Aik = ( Aik + Aki ) + ( Aik - Aki ) = 2 2 = e ik + jik , где 1 1 æ ¶u ¶u ö eik = ( Aik + Aki ) = çç i + k ÷÷ (3) 2 2 è ¶xk ¶xi ø симметричный тензор малых деформаций Коши, eik = e ki ; 5 æ ö 1 ( Aik - Aki ) = 1 çç ¶ui - ¶uk ÷÷ 2 è ¶xk ¶xi ø 2 антисимметричный тензор малых поворотов jik = - jki . В декартовой системе координат X 1 = x, X 2 = y , X 3 = z компоненты тензора малых деформаций Коши é e11 e12 e13 ù (4) e = êe 21 e 22 e 23 ú ú ê êëe 31 e 32 e 33 úû допускают простую геометрическую интерпретацию (рис. 4). jik = z z z e zz g xz x e xx x x Тело до деформации Растяжение-сжатие Сдвиг Рис. 4. Геометрическая интерпретация тензора малых деформаций Главные (диагональные) компоненты тензора деформаций описывают растяжение – сжатие в направлениях координатных осей. Например, Ddx Ddz e xx » , e zz » . dx dz Недиагональные компоненты тензора деформаций есть углы сдвига – малые изменения первоначально прямых углов g xz = g zx = 2e zx . Таким образом, вместо (3) можем записать ¶u y ¶u ¶u e xx = x , e yy = , e zz = z , ¶x ¶y ¶z ¶u y ¶u y ¶u ¶u 2e xy = 2e yx = x + = g xy , 2e yz = 2e zy = z + = g yz , (5) ¶y ¶y ¶x ¶z ¶u x ¶u z 2e zx= 2e xz= + = g zx , ¶z ¶x где u x , u y , u z - компоненты вектора перемещений в декартовой системе координат. Величина e kk = e11 + e 22 + e 33 описывает малое изменение объема при деформации. Пусть dx10 , dx20 , dx30 - линейные размеры тела до деформации. Тогда его объем до деформации есть 6 V 0 = dx10 dx20 dx30 . После деформации («чистое» растяжение-сжатие) (рис.5) имеем соответственно dx1 , dx2 , dx3 Ddx3 и V = dx1 x2 dx3 Ddx2 ( )( )( ) V = dx10 + Ddx1 x20 + Ddx2 dx30 + Ddx3 . Ddx1 Рис. 5. Изменение при деформации или объема Найдем изменение объема в результате деформации DV = V - V 0 = æ Ddx ö æ Ddx2 ö æ Ddx3 ö ÷ - dx10 dx 20 dx30 = ÷ × ç1 + = dx10 dx20 dx30 ç1 + 01 ÷ × ç1 + 0 ÷ ç 0 ÷ ç ÷ ç dx1 ø è dx2 ø è dx3 ø è = V0 [(1 + e11 )(1 + e11 )(1 + e 33 ) - 1] = = V0 (e11 + e 22 + e 33 + e11e 22 + e 22 e 33 + e 33e11 + e11e 22 e 3 ) Следовательно V - V0 » e11 + e 22 + e33 = e kk , eij << 1 (6) V0 Эта величина относительного изменения объема не зависит от выбора системы координат. Для декартовой системы координат имеем e kk = e xx + e yy + e zz = q . (7) 1.3. Основные уравнения теории упругости В технических расчетах деформацию стержня при растяжении определяют через относительное удлинение l - l0 e= l0 Идеальная упругость означает, что существует однозначная зависимость между силами и вызванными этими силами перемещениями l - l0 s = y(e ) Рис. 6. Растяжение Для многих материалов закон упругости с стержня большой точностью можно считать линейным s = Ee . (8) Это и есть экспериментально установленный закон Гука. Коэффициент пропорциональности в этом законе E - есть модуль упругости. Закон упругости справедлив, пока напряжения не достигнут некоторого предела, называемого пределом упругости. Для всех материалов, 7 применяемых в технике (кроме резины и каучукообразных полимеров), модуль упругости весьма высок по сравнению с пределом упругости, поэтому величина упругой деформации невелика – не более 1-2 % В общем случае, кроме деформации в направлении растяжения будет происходить и сжатие в поперечном направлении b - b0 e¢ = , b0 где b0 и b - поперечный размер стержня до и после деформации. Для изотропного материала величина e¢ одинакова для всех направлений в поперечном сечении (нет предпочтительного направления). Если деформация – упругая и подчиняется закону Гука, то оказывается, что отношение поперечной деформации к продольной – величина постоянная s e¢ = -ne = -n . (9) E Это – соотношение Пуассона, а коэффициент пропорциональности n коэффициент Пуассона. В трехмерном случае в произвольной системе координат закон Гука для изотропного тела можно представить следующим образом sij = 2meij + d ij le kk . (10) где l и m - коэффициенты Ламе, dij - символ Кронекера, é1, i = j; dij = ê ë0, i ¹ j , Просуммируем (10) по i=j: V - V0 2 ö æ s11 + s 22 + s33 = s kk = -3 p e = 3ç l + m ÷(e11 + e 22 + e 33 ) = 3 Ke kk » 3K 3 ø V0 è По определению K – есть модуль всестороннего сжатия. 1 1 æ ¶V ö 2 = - çç e ÷÷ , K = l + m 3 K V è ¶p ø Для одноосного растяжения из (10) имеем 2 ö æ s11 = 2me11 + le kk = 2me11 + ç K - m ÷(1 - 2n )e11 = Ee11 , 3 ø è 2 ö æ 0 = 2me 22 + le kk = -2mne11 + ç K - m ÷(1 - 2n )e11 , 3 ø è 2 ö æ 0 = 2me33 + le kk = -2mne11 + ç K - m ÷(1 - 2n )e11 . 3 ø è Отсюда следуют равенства E En E ,m= . , l= K= 2(1 + n ) (1 + n )(1 - 2n ) 3(1 - 2n ) Закон Гука (8) для чистого сдвига имеет вид t = Gg , 8 где G - модуль сдвига. Из (10) следует, что при чистом сдвиге, например, в плоскости xz s xz = 2me xz . Следовательно, m = G . Обобщенный закон Гука для анизотропного тела: sij = Cijabe ab . Более подробная запись соотношений закона Гука в произвольной системе координат: s11 = (l + 2m )e11 + l (e 22 + e33 ) , s 22 = (l + 2m )e 22 + l(e11 + e33 ) , s33 = (l + 2m )e33 + l (e 22 + e11 ) , (11) s12 = s 21 = 2me12 , s 23 = s32 = 2me32 , s13 = s31 = 2me13 . Используя обозначения для декартовой системы координат, запишем s xx = 2me xx + lq , s yy = 2me yy + lq , s zz = 2me zz + lq , (12) t xy = 2me xy = Gg xy , t yz = 2me yz º Gg yz , t zx = 2me zx º Gg zx . Уравнения (3), (5) – это геометрические уравнения, а уравнения (11) или (12) – физические. Для того чтобы сформулировать и решить задачу теории упругости, требуется записать уравнения равновесия для выделенного объема. Уравнения равновесия вида sij , j + rX j = 0 (13) используются при решении квазистатических задач. В декартовой системе координат имеем ¶s xx ¶t xy ¶t xz + + rX = 0 , + ¶x ¶z ¶y ¶t yx ¶s yy ¶t yz (14) + + + rY = 0 , ¶x ¶y ¶z ¶t zx ¶t zy ¶s zz + + + rZ = 0 , ¶x ¶y ¶z где X , Y , Z - составляющие вектора внешних объемных сил, действующих на выделенный элемент. Уравнения движения или уравнения с учетом сил инерции ¶ 2u sij , j + rX j = r 2i - (15) ¶t при решении динамических задач. Уравнения равновесия можно записать в векторной форме 9 Ñ × s + rF = r ¶ 2u 2 . ¶t В переменных, соответствующих декартовой системе координат уравнения движения записываются следующим образом ¶ 2u x ¶s xx ¶t xy ¶t xz + rX = r 2 + + ¶z ¶x ¶y ¶t ¶t yx ¶x + ¶s yy ¶y ¶t zy + ¶t yz ¶z + rY = r ¶ 2u y ¶t 2 ¶ 2u z (16) ¶t zx ¶s + + zz + rZ = r 2 ¶x ¶y ¶z ¶t В 15 уравнениях (5), (12) и (16) неизвестными являются шесть компонент тензора напряжений s xx , s yy , s zz , t xy , t yz , t zx , шесть компонент тензора деформаций e xx , e yy , e zz , e xy , e yz , e zx и три компоненты вектора перемещений ux ,u y ,uz , т.е. всего 15 неизвестных. С математической точки зрения задачу нахождения 15 неизвестных на основе 15 уравнений можно решить, если будут заданы краевые условия на поверхности тела, поведение которого изучается. В случае динамических задач требуется задать начальные условия, а условия на поверхностях могут зависеть от времени. При прямом решении задачи, когда используются все 15 уравнений, не нужны условия совместности деформаций. 1.4. Условия совместности деформаций Условия совместности деформаций, которые вытекают из геометрических уравнений (т.е., являются их следствием), в декартовой системе координат имеют вид* ¶ 2 e xx ¶y 2 ¶ 2 e yy ¶z 2 ¶ 2 e zz ¶x 2 * + ¶ 2 e yy ¶x 2 + ¶ 2 e zz + ¶ 2 e xx ¶y 2 ¶z 2 =2 =2 ¶ 2 e xy ¶x¶y ¶ 2 e yz ¶y¶z , , ¶ 2 e zx , =2 ¶z¶x Вывод уравнений совместности есть в книгах 1.Кац, Теория упругости; 2.Боли Б., Уайнер А. Теория термоупругости, 3.Тимошенко, Гудьер Теория упругости (17) 10 ¶ æ ¶e yz ¶e zx ¶e xy ç + ¶z çè ¶x ¶y ¶z ö ÷= ÷ ø ¶ æ ¶e zx ¶e xy ¶e yz ö ç ÷= + ¶x çè ¶y ¶z ¶x ÷ø ¶ 2 e zz , ¶x¶y ¶ 2 e xx , ¶y¶z 2 ¶ æ ¶e xy ¶e yz ¶e zx ö ¶ e yy ç ÷= . + ¶y çè ¶z ¶x ¶y ÷ø ¶z¶x В некоторых частных задачах эти уравнения оказываются полезными не только для проверки решения, но и для его нахождения. Перемещения из выписанных уравнений непосредственно не определяются. В различных приложениях задачи теории упругости можно формулировать и решать в напряжениях и в перемещениях в зависимости оттого, что в первую очередь требуется определить. 1.5. Уравнения Ламе Задачи теории упругости можно непосредственно решать в перемещениях. Для этого следует записать уравнения равновесия в перемещениях. Это можно сделать, выразив компоненты тензора напряжений из (12) и подставив их в (16). Окончательные уравнения можно представить в виде (l + m ) ¶q + mDu x + rX ¶x =r ¶ 2u x ¶t 2 ¶ 2u y ¶q (l + m ) + mDu y + rY = r 2 ¶y ¶t (18) ¶q ¶ 2u z (l + m ) + mDu z + rZ = r 2 ¶z ¶t Это и есть уравнения Ламе в теории упругости. В векторном виде имеем r ¶ 2u ¶t 2 = (l + m )ÑÑ × u + mDu + rF . (19) Аналогичным образом в перемещениях можно представить и краевые условия. Тогда последовательно можно определить компоненты вектора перемещений помощью (18), затем – компоненты тензора деформаций по формулам (5) и, наконец, - компоненты тензора напряжений – по соотношениям (12). 11 1.6. Уравнения Бельтрами Задачи теории упругости можно формулировать и решать в напряжения. В этом случае уравнений равновесия (16) недостаточно, чтобы найти все компоненты тензора напряжений s xx , s yy , s zz , t xy , t yz , t zx . В этом случае используют уравнения неразрывности, записанные через напряжения. Выразим с помощью соотношений закона Гука компоненты тензора деформаций через напряжения. Так как s kk = 3Ke kk (см. пункт 1.3), то из (10) найдем s s ij = 2me ij + d ij l kk 3K и 1 l s kk 1 é n ù e ij = s ij - d ij = s s ij kk úû . 2m 2m 3K 2G êë 1+ n Подставив последние равенства в (17), найдем 2 ¶ 2 t xy ¶ 2 s xx ¶ s yy n æç ¶ 2 s ¶ 2 s ö÷ , + =2 + 1 + n çè ¶x 2 ¶y 2 ÷ø ¶x¶y ¶y 2 ¶x 2 ¶ 2 s yy ¶z 2 ¶ 2 s zz ¶x 2 + ¶ 2 s zz + ¶ 2 s xx ¶y 2 ¶z 2 ¶ 2 t yz n æç ¶ 2 s ¶ 2 s ö÷ , =2 + 1 + n çè ¶y 2 ¶z 2 ÷ø ¶y¶z ¶ 2 t zx n æç ¶ 2 s ¶ 2 s ö÷ =2 + 1 + n çè ¶x 2 ¶z 2 ÷ø ¶z¶x ¶t xy ¶t yz ¶ 2 s xx n ¶ 2s ¶ æ ¶t = çç zx + ¶y¶z 1 + n ¶y¶z ¶x è ¶y ¶z ¶x ¶ 2 s yy (20) ö ÷, ÷ ø n ¶2s ¶ æ ¶t xy ¶t yz ¶t zx ö ÷, = çç + ¶z¶x 1 + n ¶z¶x ¶y è ¶z ¶x ¶y ÷ø ¶ 2 s zz n ¶2s ¶ æ ¶t yz ¶t zx ¶t xy ö ÷. = çç + ¶x¶y 1 + n ¶x¶y ¶z è ¶x ¶y ¶z ÷ø Это есть уравнения неразрывности (сплошности), записанные через напряжения. Компоненты тензора напряжений должны одновременно удовлетворять уравнениям равновесия. Для учета этого факта проведем некоторые преобразования. Складывая первое и третье уравнения (20) и учитывая первое из уравнений равновесия (14), находим 12 ¶ 2 s xx ¶y 2 + ¶ 2 s xx ¶z 2 + ( ¶ 2 s yy + s zz ¶x 2 )- n æç ¶ 2 s ¶ 2 s ¶ 2 s ö÷ 2 + + = 1 + n çè ¶x 2 ¶y 2 ¶z 2 ÷ø 2 ¶ t xy ¶t xy ö ¶ t zx ¶ æ ¶t ¶ ¶s ÷ = - æç xx + rX ö÷. +2 = 2 çç zx + ¶z¶x ¶x¶y ¶x è ¶z ¶y ÷ø ¶x è ¶x ø Перегруппировав в (21) слагаемые, найдем 1 ¶2s n ¶X . Ds xx + 2 D = r s 1 + n ¶x 2 1 + n ¶x Заменяя в (22) x на у, а затем на z, найдем еще два равенства 1 ¶2s n ¶Y , D s = r Ds yy + 2 1 + n ¶y 2 1 + n ¶y =2 2 (21) (22) 1 ¶2s n ¶Z s D = r . Ds zz + 2 1 + n ¶z 2 1 + n ¶z Складывая последние равенства с (22), найдем æ ¶X ¶Y ¶Z ö 2(1 - n ) Ds = -2rçç + + (23) ÷÷ . 1+ n ¶ x ¶ y ¶ z è ø Подставляя (23) в (22), окончательно найдем 1 ¶2s ¶X n æ ¶X ¶Y ¶Z ö Ds xx + = 2 r r + + ç ÷. 1 + n ¶x 2 ¶x 1 - n çè ¶x ¶y ¶z ÷ø Одно из второй группы уравнений найдем из четвертого уравнения (20) с помощью простых преобразований, опять же используя (14): ¶ 2 s xx n ¶ 2s ¶ æ ¶t ö ¶ æ ¶t xy ö ¶t yz ÷= ç zx ÷ + çç = ¶y¶z 1 + n ¶y¶z ¶y è ¶x ø ¶z è ¶x ÷ø ¶x 2 =- ö ¶ æ ¶s yy ¶t yz ö ¶t yz ¶ æ ¶t yz ¶s zz ç ÷- ç ÷+ r Z + + r Y + ÷ ¶z ç ¶y ÷ ¶x 2 = ¶z ¶ z ¶y çè ¶y ø è ø = - Dt yz - ( ¶ 2 s yy + s zz ) - ræç ¶Z + ¶Y ö÷ . ç ¶y ¶z ÷ ¶y¶z è ø После простой перегруппировки слагаемых это дает æ ¶Z ¶Y ö n ¶2s Dt yz + = -rçç + ÷÷ . 1 + n ¶y¶z è ¶y ¶z ø Вся система преобразованных уравнений имеет вид 1 ¶2s ¶X n æ ¶X ¶Y ¶Z ö Ds xx + = 2 r r + + ç ÷, 1 + n ¶x 2 ¶x 1 - n çè ¶x ¶y ¶z ÷ø Ds yy + 1 ¶2s ¶Y n æ ¶X ¶Y ¶Z ö = 2 r r + + ç ÷, 1 + n ¶y 2 ¶y 1 - n çè ¶x ¶y ¶z ÷ø (24) 13 Ds zz 1 ¶2s ¶Z n æ ¶X ¶Y ¶Z ö + 2 = r r + + ç ÷, 1 + n ¶z 2 1 - n çè ¶x ¶y ¶z ÷ø ¶z æ ¶X ¶Y ö n ¶2s Dt xy + = -rçç + ÷÷ , 1 + n ¶x¶y è ¶y ¶x ø æ ¶Z ¶Y ö n ¶2s Dt yz + = -rçç + ÷÷ , 1 + n ¶y¶z è ¶y ¶z ø n ¶2s æ ¶Z ¶X ö Dt zx + = -rç + ÷. 1 + n ¶z¶x è ¶x ¶z ø Уравнения (24) – есть уравнения Бельтрами-Митчелла. Если объемные силы отсутствуют, то (24) существенно упрощаются. В этом случае, как следует из (23), первый инвариант тензора напряжений s – гармоническая функция. Можно показать, что все составляющие тензора напряжений будут бигармоническими функциями. Таким образом, для решения задачи в напряжениях мы имеем уравнения (24), (14) и граничные условия на поверхностях вида s xx cos(n, x ) + t xy cos(n, y ) + t xz cos(n, z ) = Pnx , t xy cos(n, x ) + s yy cos(n, y ) + t yz cos(n, z ) = Pny , t zx cos(n, x ) + t yz cos(n, y ) + s zz cos(n, z ) = Pnz . Число уравнений больше, чем число неизвестных, но зато граничных условий – всего три. Тем не менее, этих уравнений и условий достаточно для решения задачи. 1.7. Плоские статические задачи теории упругости Для практических задач интерес представляют две предельные ситуации. 1. Если тонкая пластинка нагружена усилиями, приложенными на ее границе параллельно плоскости пластинки и равномерно распределенными по толщине (рис. 7), то компоненты напряжений s zz ; t xz ; t yz на обеих поверхностях пластинки равны нулю, и можно предварительно предположить, что они равны нулю и внутри пластинки. Тогда напряженное состояние будет определяться только компонентами s xx ; s yy ; t xy и называется плоским напряженным состоянием. Можно также предположить, что эти компоненты не зависят от z , т.е. не меняются по толщине пластинки, а являются функциями только x и y . 14 Рис. 7. Рис. 8. Тензор деформаций в этом случае можно представить в виде ée xx êe ê yx êë 0 e xy e yy 0 0 ù 0 úú , e zz úû (25) так как в направлении z есть и удлинение (деформация) и смещение. Система уравнений равновесия в этом случае без учета объемных сил и сил инерции может быть представлена в виде ¶s xx ¶t xy + = 0, ¶x ¶y ¶t yx ¶s yy (26) + = 0, ¶x ¶y а из соотношений Коши остается ¶u y ¶u e xx = x , e yy = , ¶x ¶y ¶u yy ö 1 æ ¶u ÷. (27) e xy = çç xx + 2 è ¶y ¶x ÷ø Пользуясь соотношениями закона Гука в виде (см. пункт 1.6) 1 é n ù eij = s s kk ú , (28) ij ê 2G ë 1+ n û найдем e xx = ( ) ( ) 1 1 s xx - ns yy , e yy = s yy - ns xx , E E e xy = (1 + n ) t 1 t xy º xy 2G E (29) Восемь уравнений (27) – (29) содержат восемь неизвестных и могут быть решены любым из методов (в перемещениях, в напряжениях или смешанным методом). Оставшаяся компонента тензора деформаций может быть найдена из соотношения 15 e zz = - ( ) n s xx + s yy , E (30) также следующего из закона Гука. Это и есть задача о плоском напряженном состоянии. 2. Подобные упрощения возможны и в другом предельном случае, когда размер тела в направлении z очень велик. Примером может быть длинное цилиндрическое или призматическое тело, нагруженное силами, которые перпендикулярны продольной оси тела и не меняются по его длине (рис. 8). Предположим, что концевые сечения ограничены фиксированными гладкими абсолютно жесткими плоскостями, которые препятствуют перемещениям в продольном направлении. В этом случае можно считать, что все поперечные сечения находятся в одних и тех же условиях. Поскольку в каждом поперечном сечении условия одинаковы, достаточно рассмотреть тонкий слой между двумя сечениями, расстояние между которыми – единица. Еще одним примером может быть тело, помещенное между двумя абсолютно твердыми плитами, расстояние между которыми остается неизменным, и сжимаемое силами, параллельными плоскостям плит Компоненты вектора перемещений u x и u y являются функциями только x и , но не зависят от продольной координаты В этом случае имеем y z. Перемещения u z =0† (рис. 8). ¶u y ¶u x , e yy = , ¶x ¶y ¶u ö 1 æ ¶u e xy = çç x + z ÷÷ , ¶x ø 2 è ¶y e zz = 0 , e yz = 0 , e zx = 0 . e xx = Рис. 9 Если такое тело, нагружено силами, не меняющимися по всей длине, то t xz = t yz = 0 и тензор напряжений имеет вид és xx êt ê yx êë 0 t xy s yy 0 0 ù 0 úú . s zz úû В этом случае задача также сводится к нахождению компонент тензора напряжений s xx , s yy и t xy как функций координат x и y , а компонента тензора напряжений s zz (так же как и компоненты тензора деформаций, отличные от нуля) находится из соотношений закона Гука: † . Н.И. Безухов, стр. 181 ( 16 ) s zz = n s xx + s yy , e yy [( [( ) ) ] ] e xy = (1 + n ) t 1 1 - n 2 s xx - n(1 + n )s yy , E 1 = 1 - n 2 s yy - n(1 + n )s xx , E e xx = E (31) xy . Это есть задача о плоской деформации. 1.8. Основные уравнения теории термоупругости В теории термоупругости соотношения между компонентами тензоров напряжений и деформаций имеют вид sij = 2meij + d ij [le kk - 3Ka T (T - T0 )], (32) где T - температура, в общем случае функция координат и времени, T0 температура недеформированного состояния, aT - линейный коэффициент теплового расширения, 1 æ ¶V ö aT = ç ÷ 3V è ¶T ø Этот коэффициент может быть в условиях постоянства напряжений или в условиях постоянства энтропии. Соотношения Коши остаются прежними (5). Уравнения равновесия (14) или (16) не изменяются. В декартовой системе координат уравнения (32) имеют вид s xx = 2me xx + [lq - Kw], s yy = 2me yy + [lq - Kw] , s zz = 2me zz + [lq - Kw], (33) t xy = 2me xy , t yz = 2me yz , t zx = 2me zx . w = 3a T (T - T0 ) - описывает объемное изменение в условиях постоянства напряжений, (т.е. объемное изменение, вызванное нагревом). Действительно, просуммировав первые три уравнения (33), найдем s11 + s 22 + s 33 = 3K (q - w) . (34) Если напряжения неизменны, то из последнего равенства следует dq dw = . dt dt Эти уравнения должны быть дополнены уравнением теплопроводности (в общем случае связанным с деформациями), которое в декартовой системе координат имеет вид 17 ¶e ¶T ¶ æ ¶T ö ¶ æ ¶T ö ¶ æ ¶T ö = ç lT (35) ÷÷ + ç l T ÷ + çç l T ÷ + W - 3Ka T T kk , ¶t ¶x è ¶x ø ¶y è ¶y ø ¶z è ¶z ø ¶t где l T - коэффициент теплопроводности, ce - теплоемкость при постоянстве деформаций, r - как и выше, плотность; W – плотность внутренних источников тепла. Во многих ситуациях последним слагаемым в (35) пренебрегают и приходят к несвязанной теории термоупругости. В этом случае теория позволяет определять напряжения и деформации, вызванные нагревом. Если интерес представляют только медленные процессы, то силами инерции в уравнениях равновесия (движения) пренебрегают. В этом случае приходят к квазистатическим задачам теории термоупругости, в которых время является параметром, и возникающие напряжения и деформации могут изменяться во времени со скоростью изменения температуры. Уравнения совместности в деформациях, требующиеся для решения целого ряда квазистатических задач, имеют вид (17). В общем случае свойства материалов могут зависеть от температуры. Но при условии, что в исследуемом интервале температур такими изменениями можно пренебречь, для задач термоупругости можно записать уравнения совместности в напряжениях, а затем вывести уравнения, подобные соотношениям Бельтрами-Митчелла. В конечной форме эти уравнения имеют вид 2 2 ö æ (1 + n )Ds xx + ¶ 2s + E çç 1 + n Dw + ¶ w2 ÷÷ = 0 , 3 è1- n ¶x ¶x ø ¶ 2 s E æç 1 + n ¶ 2 w ö÷ (1 + n )Ds yy + 2 + ç Dw + 2 = 0 , 3 è1- n ¶y ¶y ÷ø ¶ 2 s E æç 1 + n ¶ 2 w ö÷ (1 + n )Ds zz + 2 + ç Dw + 2 = 0 (36) 3 è1- n ¶z ¶z ÷ø 2 2 (1 + n )Dt xy + ¶ s + E ¶ w = 0 , ¶x¶y 3 ¶x¶y ce r (1 + n )Dt yz ¶ 2 s E ¶ 2w + + = 0, ¶y¶z 3 ¶y¶z ¶ 2 s E ¶ 2w = 0. + ¶z¶x 3 ¶z¶x Для задач поверхностной обработки могут представлять интерес и динамические задачи теории термоупругости. Высокие градиенты температуры и скорости ее изменения приводят к генерации волн напряжений, которые являются важным фактором, влияющим на эволюцию физико-механических свойств. (1 + n )Dt zx + 18 1.9. Основные уравнения массоупругости В теории массоупругости соотношения между компонентами тензоров напряжений и деформаций имеют вид n é ù (37) s ij = 2me ij + d ij êle kk - 3K a k (C k - C k 0 )ú , êë ú k =1 û где C k - массовые концентрации (массовые доли) компонентов, число которых n , (в общем случае C k - функции пространственных координат и времени), C k 0 - концентрации в недеформированном состоянии; a k линейные коэффициенты концентрационного расширения, 1 æ ¶V ö ÷. ç ak = 3V çè ¶C k ÷ø Компоненты тензора деформаций по-прежнему удовлетворяют соотношениям Коши (5). Уравнения равновесия (14) или (16) не изменяются. В декартовой системе координат уравнения (37) имеют вид (33), где å n åa w=3 k (Ck - Ck 0 ) . (38) k =1 Систему уравнений упругости мы должны дополнить уравнениями баланса для компонентов. Без учета явления бародиффузии (или диффузии под действием напряжений) в изотермических условиях, уравнения баланса для компонентов можно представить в виде ¶C k = -Ñ × J k + wk , ¶t (39) где J k - диффузионные потоки компонентов, wk - источники и стоки компонентов в химических реакциях. Дополнительно должны выполняться соотношения n n åJ k = 0, k =1 åC k =1 (40) k =1 В простейшем случае для потоков справедлив обобщенный закон Фика, в соответствии с которым n Jk = - åD kj ÑC k , (41) j =1 где Dkj - парциальные коэффициенты диффузии, в общем случае, - функции концентраций. 19 Из выписанных соотношений следует, что для описания диффузии в бинарной системе требуется всего одно уравнение диффузии. Если диффузия в кристалле идет по вакансионному механизму и вакансии – неравновесны, то к системе уравнений следует добавить уравнение для вакансий, предварительно определив концентрации вакансий и включив их в баланс массы, а потоки вакансий – в баланс потоков. Уравнения неразрывности в напряжениях имеют вид (36), где функция w следует из (38). Основная проблема в решении задач массопругости заключается в отсутствии данных о величинах парциальных диффузионных коэффициентов для подавляющего большинства систем. Для многих практически важных ситуаций задачи массоупругости можно считать квазистатическими. Но в условиях высокочастотных или кратковременных интенсивных воздействий интерес могут представлять и динамические задачи. Связанные задачи теории термоупругости (с учетом бародиффузии или диффузии под действием напряжений) требуют специального исследования. 1.10. Обобщенное плоское напряженное состояние При постановке задачи о плоском напряженном состоянии предполагалось, что силы, приложенные к краям пластинки, равномерно распределены по ее толщине, которая предполагалась малой. Отсюда следовало предположение, что напряжения s x , s y и t xy не зависят от координаты z., т.е. они распределены по толщине пластинки равномерно. Компоненты s z , t xz , t yz предполагались отсутствующими. Практически же встречаются пластинки конечной толщины, хотя и малой, но не исчезающе малой, что следовало бы иметь в виду. При конечной толщине пластинки даже при условии равномерного распределения сил по ее наружному контуру компоненты s xx , s yy и t xy могут по толщине пластинки изменяться, хотя и незначительно, но симметрично относительно срединной плоскости пластинки. Другие составляющие тензора напряжений тоже могут появиться. Введем понятие о погонных усилиях, под которыми понимаем следующие интегралы от напряжений + Nx = h 2 òs - h 2 + xx (z )dz , Ny = h 2 òs - h 2 + yy (z )dz , N xy = h 2 òt - xy (z )dz . (42) h 2 От погонных усилий перейдем к средним по толщине напряжениям, а именно 20 (s xx )m = N x , (s yy )m = Ny h h , (s zz )m = Nz . h (43) В этом случае в уравнениях равновесия (14) понимаются именно такие средние величины. Очевидно, что все другие уравнения сохраняют свою силу. Часть II Примеры решения частных задач 2.1. Простейшие задачи теории упругости 1. Однородная деформация. Деформация тела называется однородной, если все компоненты тензора деформаций постоянны по всему объему тела, т.е. не зависят от координат. Примером однородной деформации может быть деформация стержня или бруса с сечением произвольной формы, ось которого перпендикулярна сечению, а ее направление совпадает с направлением растягивающей силы (рис. 1). Боковые поверхности стержня (или боковые грани бруса) свободны от действия внешних сил. Массовые силы отсутствуют. Следует также предположить, что свойства стержня одинаковы во всех сечениях. Все частицы стержня имеют одинаковую температуру. Принятые условия (б) означают, что F (1) s xx = p = , S где S – площадь сечения; p = pn = F S нормальное к S напряжение Все остальные компоненты тензора напряжений, равны нулю. Тензор напряжений в а рассматриваемом случае имеет вид é p 0 0ù s = ê 0 0 0ú . ú ê êë 0 0 0úû Следовательно, на основе соотношений закона Гука можем записать б Рис. 1. К задаче об p = 2me xx + l e xx + e yy + e zz , ( ) 0 = 2me yy + l (e xx + e yy + e zz ), 0 = 2me zz + l (e xx + e yy + e zz ) однородной деформации В результате находим все компоненты тензора деформаций, отличные от нуля: l p n (2) e yy = e zz = = - p, E 2 m 3K 21 l +m p p= . 3 Km E Заметим, что в большинстве задач о равновесии упругих тел под действием различных сил перемещения могут быть определены только с точностью до перемещения всего тела как абсолютно твердого. С этим связано понятие инвариантности законов механики по отношению к выбору места и направления в пространстве. В задаче о растяжении стержня формулы для перемещений получаем как решение системы уравнений ¶u y ¶u ¶u p n n e xx = x = , e yy = = - p , e zz = z = - p , ¶y E ¶x E ¶z E ¶u y ¶u (3) 2e xy = x + = 0, ¶y ¶x ¶u ¶u 2e xz = x + z = 0 , ¶z ¶x ¶u y ¶u z 2e yz = = 0. + ¶y ¶z Перемещения из системы линейных уравнений (3) можно определить с точностью до неизвестных функций‡. Из первых трех уравнений имеем p pn pn u x = x + j1 ( y , z ) , u y = y + j 2 (x , z ) , u z = z + j 3 ( x, y ) . E E E Три других уравнения дают: ¶j1 ( y , z ) ¶j 2 ( x, z ) + = 0, ¶y ¶x ¶j1 ( y , z ) ¶j3 ( x, y ) + (4) = 0, ¶z ¶x ¶j 2 ( x, z ) ¶j3 (x , y ) + = 0. ¶z ¶y Следовательно, ¶j ¶j ¶j ¶j1 ¶j ¶j 2 = - 2 = a (z ) , 1 = - 3 = b( y ) , = - 3 = g(x ) , ¶y ¶z ¶x ¶z ¶x ¶y где a, b, g - пока произвольные функции своих аргументов. После интегрирования этих уравнений получаем j1 = a( z ) y + f1 (z ) = b( y )z + g1 ( y ) , j 2 = - a( z )x + f 2 (z ) = g (x )z + g 2 ( x ) , j3 = - b( y )x + f 3 ( y ) = - g (x ) y + g 3 (x ) , где f i , g i - произвольные функции своих аргументов. Отсюда непосредственно видно, что искомые функции должны иметь вид j1 = k1 zy + k 2 z + k3 y + k 4 , e xx = ‡ Седов Л.И. Механика сплошной среды. Т.2. /М.: Наука, 1984. – 560 С. 22 j 2 = m1 zx + m2 z + m3 x + m4 , j3 = l1 xy + l 2 x + l3 y + l 4 , где k i , mi , li - некоторые постоянные, которые в силу (4) должны быть связаны между собой соотношениями k1 z + k3 + m1 z + m3 = 0 , k1 y + k 2 + l1 y + l 2 = 0 , m1 x + m2 + l1 x + l3 = 0 , которые должны выполняться при любых x , y . z . Из этих соотношений следует k1 = - m1; k k = -l1; m1 = -l1 , что возможно, если k1 = m1 = l1 = 0 . Из этих же соотношений следует k 3 = -m3 = - a3 ; k 2 = -l 2 = a2 ; m2 = -l3 = - a1 , где введены новые обозначения для постоянных. В результате находим j1 = a 2 z - a3 y + k 4 , j 2 = - a1 z + a3 x + m4 , j3 = - a 2 x + a1 y + l 4 . Вводя векторы r = xi + yj + zk , r = a1i + a2 j + a3k и j 0 = k 4 i + m4 j + l 4 k , видим, что полученное решение можно записать следующим образом u = j = j1i + j 2 j + j 3k = j 0 + a ´ r При бесконечно малых a1 , a 2 , a3 последняя формула определяет перемещение тела как абсолютно твердого. Чтобы исключить из рассмотрения перемещение тела как абсолютно твердого, нужно дополнительно потребовать, например, чтобы некоторая точка упругого тела сохраняла свое положение в пространстве и компоненты вектора малого поворота главных осей деформации в этой точке были равны нулю. Если в задаче о растяжении стержня дополнительно потребовать, чтобы в начале координат отсутствовали перемещения и повороты главных осей деформации, т.е., чтобы при x = 0, y = 0, z = 0 выполнялись условия u x = 0, u y = 0, u z = 0 и ¶u y ¶u x ¶u ¶u z ¶u y ¶u (5) = 0 , x - z = 0, = 0, ¶y ¶z ¶z ¶x ¶y ¶x то выражения для перемещений примут вид 23 p pn pn x , uy = y , uz = z. (6) E E E Дополнительные условия могут быть другими, но они всегда необходимы. Первая формула (6) показывает, что плоские сечения при деформации всегда остаются плоскими; другие говорят о том, что во всех поперечных сечениях перемещения u y , u z одинаковы и пропорциональны расстоянию данной точки поперечного сечения до оси бруса (стержня). ux = 2. Стержень под действием собственного веса. Рассмотрим теперь задачу о растяжении бруса плотности r и длиной l , закрепленного своим верхним концом и подверженного деформации растяжения под действием собственного веса. Система координат расположена так, как показано на рис. 2. Предположим, что всюду на внешней поверхности бруса e ij = 0 , но F = gi и s n = 0 , за исключением торца A , где брус закреплен. Напряжения на торце А определяются в результате решения задачи. Уравнение равновесия в этом случае будет иметь вид ¶s xx = -rg , ¶x откуда следует s xx = -rgx + j( y , z ) , (7) где j( y, z ) - пока произвольная функция, для определения которой воспользуемся условием на Рис. 2. К задаче о нижнем торце бруса. Так как s = 0 при x = 0 , то xx растяжении стержня под действием собственного j( y, z ) = 0 . веса Распределение напряжений (7) и s yy = s zz = s xz = s zy = s xy = 0 удовлетворяет всем уравнениям равновесия внутри бруса и условиям на его поверхности, что можно проверить непосредственной подстановкой. На верхнем торце бруса, т.е. в сечении А, имеем G s xx = rgl = , S где S - площадь поперечного сечения бруса, G = rglS - его полный вес. С помощью закона Гука определим компоненты тензора деформаций s ns ns rgx nrgx nrgx e xx = xx = , e yy = - xx = , e zz = - xx = , (8) E E E E E E e xy = e zy = e xz = 0 . В том, что деформации удовлетворяют уравнениям совместности, также легко убедиться. Для определения перемещений имеем шесть уравнений 24 ¶u x rgx ¶u y nrgx ¶u z nrgx =, , = , = ¶x E E ¶z E ¶y ¶u x ¶u y ¶u x ¶u z ¶u y ¶u z + = + = = 0. (9) + ¶z ¶x ¶y ¶x ¶y ¶z Первые три уравнения системы (9) дают nrgxy nrgxz rgx 2 ux = + y 2 ( x, z ) , u z = + y 3 ( y, x ) + y1 ( y , z ) , u y = (10) 2E E E Подставляя (10) во вторую группу уравнений (9), найдем систему уравнений для определения неизвестных функций ¶y1 nrgy ¶y 2 + + = 0, E ¶y ¶x nrgy ¶y 3 ¶y1 = 0, + + E ¶x ¶z ¶y 2 ¶y 3 + = 0. ¶z ¶y Если теперь ввести обозначения nrg 2 j1 = y1 + y + z2 , 2E j 2 = y 2 , j3 = y 3 , то задача определения неизвестных функций сведется к уже решенной системе уравнений для ji . Следовательно, решение задачи для перемещений примет вид rg 2 ux = x + n y 2 + z 2 + a 2 z - a3 y + k 4 , 2E nrgxy uy = - a1 z + a3 x + m4 , 2E nrgxz uz = - a 2 x + a1 y + l 4 . 2E Полагая, что в центре верхнего торца, т.е. при x = -l , y = 0, z = 0 , выполняются условия (5), найдем rg 2 a1 = a 2 = a3 = m4 = l 4 = 0, k 4 = l . 2E Следовательно, формулы для перемещений примут вид rg 2 2 ux = x - l + n y2 + z2 , (11) 2E nrgxy nrgxz uy = , uz = . 2E 2E Полученное решение говорит о том, что точки оси бруса перемещаются вертикально. Во всех других точках, кроме точек сечения x=0, ( ( ) ( )) (( ) ( )) 25 горизонтальные перемещения отличны от нуля. Произвольное плоское сечение x = x0 после деформации будет описываться уравнением rg x = x + u x = x0 x0 2 - l 2 + n y 2 + z 2 , 2E т.е. превращается в поверхность параболоида вращения. Наибольшее напряжение s11 получается в верхнем сечении бруса. Оно не зависит от площади поперечного сечения и определяется формулой s11 (x = -l ) = rgl . 3. Требуется определить модуль сдвига из опыта, принципиальная схема которого показана на рис. 3. В этом случае единственная компонента x d тензора напряжений, отличная от нуля, это F F uz s xz = . S Смещение любой точки бруска j происходит вдоль оси z; а смещением d вдоль других осей можно пренебречь. z Следовательно ux = u y = 0 , Рис. 3. К определению модуля сдвига (( ) ( )) u z = x tgj » xj Из соотношений Коши находим: ¶u ö 1 ¶u z 1 1 æ ¶u j e xz = ç z + x ÷ = = tgj » . ¶z ø 2 ¶x 2 è ¶x 2 2 С другой стороны, из закона Гука имеем: 1 1 F e xz = s xz = 2m 2m S Из рисунка следует: d tg (2j ) » 2j » , d откуда имеем модуль сдвига Fd m =G=2 Sd (12) 4. Определить деформацию шара под действием собственного веса. Сила тяготения, действующая на единицу массы шара в точке с радиус-вектором r (рис. 4), направлена противоположно радиус-вектору f = - gr R Если шар – изотропное тело, то задача является сферически симметричной и одномерной, а деформация представляет собой смещение точек шара в радиальном направлении, угловые компоненты вектора смещения – нулевые: 26 uq = uj = 0, ur = u (r ) . r В этих условиях (в сферическиR симметричной системе координат) уравнение равновесия принимает вид: r r d æ 1 d 2 ö r u ÷= A , (13) ç R dr è r 2 dr ø где Рис. 4. Шар под действием (1 + n )(1 - 2n ) . собственного веса A = rg E (1 - n ) Дополнительными условиями будут конечность перемещений в центре шара (или условие симметрии) и отсутствие напряжений на его внешней поверхности u (0) < ¥; srr (R ) = 0 . Общее решение уравнения (13) имеет вид ( ) r3 r C u (r ) = A + C1 + 22 10 R 3 r (14) Из условия в нуле сразу находим C2 = 0 . Для того чтобы воспользоваться вторым условием, нам нужно выразить радиальные напряжения через деформации: srr = [ ( E (1 - n )e rr + n eqq + ejj (1 + n )(1 - 2n ) )] (15) Для сферически симметричного случая имеем (см. Приложения) e rr = ¶u r u u , e qq = r , e jj = r ¶r r r (16) Находим из (14): ¶ur 3 Ar 2 C1 = + , err = 3 ¶r 10 R ur r 2 C1 eqq = ejj = =A + . r 10 R 3 Подставляем полученные выражения напряжения при r = R нулю. Это дает C1 = В результате находим: 3 3-n AR . 10 1+ n в (15) и приравниваем 27 2 AR é 3 - n æ r ö ù - ç ÷ ú, u (r ) = rê 10 ê 1 + n è R ø ú û ë 2 AR é æ r ö 3 - n ù err = (17) ú, ê3ç ÷ 10 ê è R ø 1 + n ú û ë 2 AR éæ r ö 3 - n ù e qq = e jj = ú, êç ÷ 10 êè R ø 1 + n ú û ë Следовательно, внутри шара существует недеформированная в радиальном направлении поверхность, где e rr = 0 Формулы (17) позволяют с помощью соотношений закона Гука найти распределения всех компонент тензора напряжений, отличных от нуля, по радиусу шара. Имеем: ( ) s qq = (l + 2m )e qq + l (e rr + e jj ) , s rr = (l + 2m )e rr + l e qq + e jj , (18) s jj = (l + 2m )e jj + l (e rr + e qq ) . С учетом соотношений, приведенных в п.1.3, находим (1 - n )E . l + 2m = (1 - 2n )(1 + n ) и s rr = [ ( (19) )] E (1 - n )e rr + n e qq + ejj . (1 - 2n )(1 + n ) Следовательно, s rr 2 ù E (3 - n ) AR éæ r ö = êç ÷ - 1ú . (1 - 2n )(1 + n ) 10 êëè R ø úû Аналогично найдем s rr 2 ù E (3 - n ) AR é1 + 3n æ r ö = 1 ú. ê ç ÷ (1 - 2n )(1 + n ) 10 êë 3 - n è R ø úû 5. Определить деформацию полой цилиндрической трубы, заполненной газом или жидкостью с давлением p. Давление снаружи отсутствует, силой тяжести пренебречь. 28 Здесь нам потребуется цилиндрическая система координат с осью z, направленной вдоль оси цилиндра R1 (рис. 5). В соответствии с законом Паскаля, давление внутри трубы изотропно и действует во всех направлениях одинаково. Следовательно, деформация R2 стенок трубы происходит только в радиальном p направлении. Задача вновь становится одномерной. Уравнение равновесия в перемещениях в Рис. 5. Цилиндрическая цилиндрической системе координат имеет вид: труба под действием d æ1 d (20) (ru )ö÷ = 0, ç внутреннего давления dr è r dr ø а граничные условия - вид s rr (R1 ) = - p , s rr (R2 ) = 0 (21) Записываем общее решение: 1 1 u (r ) = C1r + C 2 . 2 r Следовательно, находим деформации e rr = ¶u r 1 1 = C1 - C 2 2 , 2 ¶r r e jj = ur 1 1 = C1 + C 2 2 , 2 r r (22) e zz = 0 . Подставляя (22) в соотношение закона Гука для радиальных напряжений E (1 - n )e rr + n e zz + e jj , (23) s rr = (1 + n )(1 - 2n ) найдем C2 ù E é C1 s rr = 1 2 n ( ) ú. (1 + n )(1 - 2n ) êë 2 r2 û Следовательно, имеем систему уравнений для нахождения постоянных интегрирования é C1 C ù E (24) ê - (1 - 2n ) 22 ú = - p , (1 + n )(1 - 2n ) ëê 2 R1 ûú C1 C - (1 - 2n ) 22 = 0 , 2 R2 [ ( )] откуда последовательно находим постоянные интегрирования, перемещения, деформации и напряжения, отличные от нуля. Действительно, подставляя постоянные интегрирования 29 R12 p C1 = 2 (1 + n )(1 - 2n ) 2 , E R2 - R12 C2 = 2 2 p (1 + n ) R21 R2 2 . E R2 - R1 в общее решение, находим R12 é R22 ù p u (r ) = (1 + n ) 2 ú. ê(1 - 2n )r + E r ûú R2 - R12 ëê Следовательно, é R22 ù ê(1 - 2n ) - 2 ú , r úû êë R12 é R22 ù p ( ) ( ) ( ) r 1 1 2 e jj = +n 2 - n + 2 ú. 2 ê E R2 - R1 êë r úû R12 p e rr (r ) = (1 + n ) 2 E R2 - R12 Из (23) следует é R22 ù 1- 2 ú . 2 2 ê R2 - R1 ëê r ûú Аналогично из соотношений закона Гука для данной задачи имеем pR12 é R22 ù E (1 - n )e jj + ne rr º 2 2 ê1 + 2 ú , s jj = (1 + n )(1 - 2n ) R2 - R1 ëê r ûú s rr (r ) = pR12 [ s zz ] 2 pnR12 E = n e +e º . (1 + n )(1 - 2n ) rr jj R22 - R12 ( ) 6. Определить деформацию сплошного цилиндра, равномерно вращающегося вокруг своей оси с угловой скоростью ω. Силой тяжести пренебрежем. Как и в предыдущей задаче, система координат – цилиндрическая. На единицу массы цилиндра в точке с радиус-вектором r действует центробежная сила f = w2r В соответствии с условиями, деформация цилиндра происходит только в направлении r и только под действием этой силы. z Математическая постановка задачи включает уравнение равновесия в перемещениях: w ( )( ) d æ1 d 1 1 2 + n n ö (ru )÷ = -rw2r (25) ç dr è r dr E (1 - n ) ø r и граничные условия: R u (0) < ¥; srr (R ) = 0 . Общее решение уравнения (25) имеет вид: Рис. 6. К задаче о вращающемся цилиндре 30 r 3 (1 + n )(1 - 2n ) C1 C u (r ) = -rw + r+ 2 . 2 8 E (1 - n ) r Из условия в нуле имеем С2=0. Чтобы найти постоянную интегрирования С1, поступаем аналогично предыдущему. Определяем деформации 2 ¶u r 2 3r (1 + n )(1 - 2n ) C1 e rr = = -rw + , ¶r 2 8 E (1 - n ) 2 ur r 2 (1 + n )(1 - 2n ) C1 = -rw 2 + , 2 8 r E (1 - n ) e zz = 0 , и подставляем их в соотношение для радиальных напряжений (23): 2 é C1 ù E 2 r (1 + n )(1 - 2n ) (3 - 2n )ú . s rr = ê - rw (1 + n )(1 - 2n ) êë 2 8 E (1 - n ) úû Используя внешнее граничное условие, находим С1 e jj = (26) R 2 (1 + n )(1 - 2n ) C1 = rw (3 - 2n ) . 4 E (1 - n ) 2 Следовательно, распределение радиальных перемещений во вращающемся цилиндре описывается формулой u(r ) = rw2 (1 + n )(1 - 2n ) r [(3 - 2n )R 2 - r 2 ]. 8E (1 - n ) (27) Далее находим деформации (1 + n )(1 - 2n ) [(3 - 2n )R 2 - 3r 2 ], 8E (1 - n ) (1 + n )(1 - 2n ) [(3 - 2n )R 2 - r 2 ] e jj (r ) = rw 2 8E (1 - n ) e rr (r ) = rw 2 и напряжения s rr (r ) = s jj s zz [ ] rw2 (3 - 2n ) R 2 - r 2 , 8(1 - n ) rw 2 = 8 é 2 1+ n 2 ù 3 2 n R r , ( ) êë 1 - n úû rw2 n (3 - 2n )R 2 - 2r 2 . = 4 1- n [ ] 2.2. Напряжения в пластине Исследуем напряженно-деформированное состояние, которое возникает при насыщении свободной от нагрузок толстой пластины произвольной формы вследствие диффузии элементов из окружающего 31 пространства или при нагреве поверхности этой пластины равномерно распределенным источником: T = T (x ) или Ck = Ck (x ) , или w = w( x ) (рис. 7). Можно предположить, что в этих условиях s zz = s yy = s( x ) , s xx = s xy = s xz = s yz = 0 . В этом случае уравнения равновесия выполняются тождественно. Из шести условий совместности (17) (раздел 1.4) остаются два Рис. 7. К задаче о напряжениях в пластине эквивалентных уравнения: d 2e (28) = 0 , e zz = e yy = e( x ) . dx 2 Решение уравнения (28) имеет вид e = C1 x + C 2 . (29) Из соотношений Дюамеля-Неймана находим s = 2me + [l (2e + e xx ) - Kw] , 0 = 2me xx + [l (2e + e xx ) - Kw]. Последнее соотношение дает 1 [Kw - 2le ] º 1 1 + n w - 2n e . e xx = l + 2m 31- n 1- n Следовательно, E æ wö s= çe - ÷ . 1- n è 3ø или w E E (C1x + C2 ) . s=+ 3 1- n 1- n Для свободной незакрепленной пластины равнодействующее усилие по контуру пластины и равнодействующий момент сил равны нулю: h h ò s(x)dx = 0 , ò s(x )xdx = 0 0 0 (30) Напряжение s действует перпендикулярно контуру пластины в плоскости yz , h - толщина пластины. Условия (30) позволяют найти систему уравнений для определения постоянных интегрирования h - ò 0 h ò h ò w E E E dx + C1 xdx + C 2 dx = 0 , 3 1- n 1- n 1- n 0 0 32 h - ò h h ò ò w E E 2 E xdx + C1 x dx + C2 xdx = 0 3 1- n 1- n 1- n 0 0 0 Если свойства не зависят от температуры и координаты, все интегралы, кроме двух, легко берутся, система уравнений принимает вид h - ò 0 h - ò 0 w h2 dx + C1 + C2 h = 0 , 3 2 w h3 h2 xdx + C1 C + 2 = 0. 3 3 2 и решается без труда. Если свойства нельзя считать постоянными по толщине пластины, то систему уравнений для определения постоянных интегрирования удобно представить следующим образом - N + C1b + C 2 a = 0 , - M + C1g + C 2b = 0 , где h N= h ò ò E E 1 1 w dx , M = wx dx , 3 1- n 3 1- n 0 h a= ò 0 0 h ò h ò E E E 2 dx , b = xdx , g = x dx . 1- n 1- n 1- n 0 0 Решение системы уравнений имеет вид Nb - Ma Ng - Mb C1 = 2 , C2 = . b - ga b 2 - ga Далее, используя представленные соотношения, найдем компоненты тензоров напряжений и деформаций, отличные от нуля. все 2.3. Напряжения в нагретом диске Найдем напряжения в тонком круглом диске с радиальным отверстием или без него и с радиальным распределением температуры (рис. 8). Т.е. температура T = T (r ) - заданная функция радиальной координаты. Силой тяжести и внешним давлением пренебрегаем. Так как диск – тонкий, напряженное состояние в нем можно считать плоским, т.е. s zz = 0 . Из симметрии задачи следует, что радиальные перемещения зависят только от радиуса r, а перемещения в направлении q Рис. 8. Тонкий диск 33 равны нулю. Следовательно, с учетом симметрии задачи в цилиндрической системе координат du u (31) e rr = , e qq = , e rq = e rz = e qz = 0 . dr r Из соотношений Дюамела-Неймана имеем s rr = 2me rr + le kk - Kw , s qq = 2me qq + le kk - Kw , 0 = 2me zz + le kk - Kw , где w = 3a T (T - T0 ) . Из последнего уравнения находим l K (32) (e + e ) . e zz = w(l + 2m ) (l + 2m ) qq rr Следовательно, находим s rr = 4m(l + m ) 2ml 2mK e rr + e qq w, (l + 2m ) (l + 2m ) (l + 2m ) 4m(l + m ) 2ml 2mK e qq + e rr w, (l + 2m ) (l + 2m ) (l + 2m ) или с учетом связи коэффициентов Ламе с модулем упругости и коэффициентом Пуассона – E [e + ne qq ] - E w , s rr = 2 rr 3(1 - n ) 1- n E E [ ] (33) s qq = e + ne w. qq rr 2 3 1 ( n ) 1- n С учетом симметрии задачи из уравнений равновесия остается одно s qq = ds rr s rr - s qq + = 0. dr r или (34) Используя (31), (32), представим (34) в виде d 2 u 1 du u 1 + n dw + = 3 dr dr 2 r dr r 2 d é1 d ù 1 + n dw ru ( ) úû = 3 dr . dr êë r dr Первый интеграл этого уравнения есть 1 d (ru ) = 1 + n w + C1 . r dr 3 Последующее интегрирование дает (35) 34 u= 1+ n 3r r ò R1 w(r )rdr + C1 C r+ 2 , r 2 (36) где R1 - радиус кругового отверстия. Дальнейший ход решения задачи аналогичен простейшим задачам теории упругости. Это решение годится и в том случае, если температура – меняется во времени. Условие применимости – скорость изменения температуры должна быть много меньше скорости изменения механических величин динамических процессах. Фактически мы должны принять, что напряжения и деформации мгновенно подстраиваются под изменение поля температуры. Для задачи упругости время будет параметром. Тогда для каждого момента времени, пользуясь полученным решением, можно рассчитать напряжения и деформации, соответствующие изменяющемуся во времени температурному полю. Второе условие, которому необходимо удовлетворить для использования полученного решения: температура не должна превышать значения, при котором материал выходит за пределы упругости. В противном случае потребуется прибегнуть к одной из теорий, описывающих неупругое поведение материала (к моделям, пластичности, ползучести, вязкоупругости и др.). Эволюцию полей необратимых деформаций, связанных с диффузией, фазовыми и химическими превращениями в твердой фазе, в первом приближении также можно исследовать с помощью подобных решений (см. часть 1, разделы 1.8-1.10). Все сказанное относится и к задачам, описанным далее. 2.4. Напряжения в цилиндре В цилиндрической системе координат удобно решать еще одну задачу. Пусть требуется найти напряжения в полом цилиндре, вызванные неравномерностью его нагрева вдоль радиальной координаты. Силой тяжести и внешним давлением можно пренебречь. Температура T = T (r ) заданная функция радиальной координаты. Пренебрегая влиянием торцов, можно считать, что сечения трубы, перпендикулярные к ее оси, остаются плоскими и работают в одинаковых условиях, так что радиальные перемещения зависят только от радиуса, перемещения в направлении q отсутствуют. Как и в предыдущей задаче, справедливы соотношения (31). Относительное удлинение в направлении z пока неизвестно, но гипотеза плоских сечений позволяет считать, что e zz = const . Эта величина будет явно присутствовать во всех формулах и потребует определения на основе дополнительного условия. Уравнение равновесия остается прежним. Так, из соотношений Дюамеля-Неймана найдем s rr = (l + 2m )e rr + l (e qq + e zz ) - Kw , s qq = (l + 2m )e qq + l (e rr + e zz ) - Kw , 35 s zz = (l + 2m )e zz + l(e qq + e rr ) - Kw , s rq = s rz = s qz = 0 . Используя связь между коэффициентами Ламе и техническими величинами ( E , n ) и соотношение (19), запишем nE E (1 - n )E du + æu ö s rr = w, ç + e zz ÷ 3 1 2 (1 - 2n )(1 + n ) dr (1 - 2n )(1 + n ) è r ( n ) ø nE (1 - n )E u + E æ du ö s qq = (37) w, ç + e zz ÷ (1 - 2n )(1 + n ) r (1 - 2n )(1 + n ) è dr ø 3(1 - 2n ) nE E (1 - n )E e + æ u du ö s zz = w. ç + ÷zz (1 - 2n )(1 + n ) (1 - 2n )(1 + n ) è r dr ø 3(1 - 2n ) Подставляя первые два соотношения (37) в уравнение равновесия (34), найдем d 2 u 1 du u 1 1 + n dw + = dr 2 r dr r 2 3 1 - n dr или d é1 d ù 1 1 + n dw (38) ( ru ) úû = 3 1 - n dr dr êë r dr Это уравнение отличается от (35) только коэффициентом. Следовательно, сразу записываем решение 1 1+ n 1 u= 3 1- n r r ò R1 w(r )rdr + C1 C r+ 2 . 2 r (39) В качестве граничных условий к задаче примем равенство нулю радиальных напряжений на внутренней и внешней поверхностях цилиндра (рис. 9): r = R1 : s rr = 0 ; (40) r = R2 : s rr = 0 Еще одно условие – интегральное условие R1 равновесия: R2 R2 (41) s zz (r )rdr = 0 ò R1 Рис. 9. К задачам о равновесии тел с цилиндрической симметрией. имеет место для цилиндра со свободными от нагрузки торцевыми поверхностями. Это условие означает, что труба не несет осевой нагрузки. 36 Этих трех условий достаточно, чтобы найти неизвестные величины C1 , C 2 , e zz §. Непосредственно из полученного решения на основе (31) имеем r ù é 1 1+ n ê 1 ú C C e rr = w(r ) - 2 w(r )rdr ú + 1 - 22 , (42) ê 2 r 3 1- n r úû êë R1 ò e qq = Следовательно, напряжений найдем 11+ n 1 31- n r2 на s rr s qq r ò R1 основе соотношений E 1 =3(1 - n ) r 2 1 E = 3(1 - n ) r 2 C1 C 2 + 2 . 2 r w (r )rdr + r ò w(r )rdr + A - R1 r ò (37) w(r )rdr - R1 B r2 для радиальных , E w B + A+ 2 , 1- n 3 r (43) где C2 E E é C1 ù + ne , = B . (44) zz ú (1 - 2n )(1 + n ) êë 2 1+ n û Для осевых напряжений получаем формулу E nE (1 - n )E e = w+ C1 + s zz = (1 - 2n )(1 + n ) (1 - 2n )(1 + n ) zz 3(1 - n ) . (45) E =w + 2 An - Ee zz . 3(1 - n ) Воспользовавшись граничными условиями (40), найдем систему уравнений для определения постоянных A и B B A - 2 = 0, R1 A= - E 1 3(1 - n ) R2 2 R2 ò w(r )rdr + A - R1 B R2 2 = 0, откуда находим § Если торцы цилиндра закреплены, то очевидным условием будет равенство нулю смещений (и, следовательно, деформаций) в осевом направлении. Тогда e zz = 0 . 37 B= R12 E 1 3(1 - n ) R2 2 - R12 A= где R2 ò w(r )rdr , R1 R2 E 1 3(1 - n ) R2 2 - R12 ò w(r )rdr . (46) R1 Следовательно, на основе (44) получаем 1 1+ n (1 - 2n )wcp - 2ne zz , C1 = 3 1- n R2 1+ n C2 = 1 wcp , 6 1- n wcp = 2 R22 - R12 R2 ò rw(r )dr - (47) R1 среднее значение приращения w (вследствие изменения температуры или концентраций) в пределах поперечного сечения трубы. Для того, чтобы найти осевую деформацию, постоянную для всех сечений трубы, имеем равенство R2 ò R1 é ù E ê- 3(1 - n ) w + 2 An - Ee zz ú rdr = 0 ë û или E wcp + 2 An - Ee zz = 0 , 3(1 - n ) откуда с учетом (46), (47) находим e zz = - wcp . - (48) 2.5. Напряжения в шаре Рассмотрим упругий шар, с неоднородным распределением температуры или концентраций легирующих элементов, симметричным относительно центра шара, так что T = T (r ) или C k = C k (r ) . Массовые силы отсутствуют. Условия симметрии позволяют считать, что s qr = s qj = s jr = 0 , (49) e qr = e qj = e jr = 0 , а остальные компоненты тензоров напряжений и деформаций являются функциями только радиальной координаты (и, возможно, времени, как параметра). В этих условиях 38 du u (50) , e qq = e jj = . dr r Из трех уравнений равновесия в этом случае остается одно ¶s rr 2s rr - s qq - s jj (51) + =0 ¶r r С учетом (50) и соотношений, связывающих коэффициенты Ламе и технические величины E , n , имеем три уравнения, связывающие компоненты тензоров напряжений с радиальным перемещением nE E du uö E æ du s rr = + w, ç +2 ÷1 + n dr (1 + n )(1 - 2n ) è dr r ø 3(1 - 2n ) nE E u uö E æ du s qq = s jj = + (52) w. ç +2 ÷1 + n r (1 + n )(1 - 2n ) è dr r ø 3(1 - 2n ) Подставляя (52) в (51), придем к уравнению равновесия в перемещениях в сферической системе координат d 2u é 1 du u ù 1 1 + n dw + 2 ê r dr - 2 ú = 3 1 - n dr 2 ë dr r û или d é 1 d r 2 u ù 1 1 + n dw . (53) ê ú= dr ëê r 2 dr ûú 3 1 - n dr Первый интеграл этого уравнения есть 1 d r 2u 1 1 + n w + C1 . = 3 1- n r 2 dr Последующее интегрирование дает e rr = ( ) ( ) 1 1+ n 1 u= 3 1- n r 2 r ò w(r )r 2 dr + R1 C1 C r + 22 , 3 r (54) где R1 - радиус полости. Следовательно, находим деформации e rr 2 1+ n 1 =3 1- n r3 e qq = e jj = r ò w(r )r 2 dr + R1 1 1+ n 1 3 1- n r3 1 1+ n C C w + 1 - 2 32 , 3 1- n 3 r r ò w(r )r 2 dr + R1 C1 C 2 . + 3 r3 Следовательно, из первого соотношения (52) имеем s rr 2 E 1 =3 1- n r 3 r ò R1 w(r )r 2 dr + 1 E C E C1 - 2 32 . 3 1 - 2n 1 + n r (55) 39 Для нахождения постоянных интегрирования нужно сформулировать граничные условия. Примем, что внутренняя и внешняя поверхность шара свободны от нагрузок, т.е. выполняются условия (40). Эти условия приводят к системе уравнений относительно C1 и C 2 , решение которой имеет вид C1 = 1 - 2n 2 1 - n R23 - R13 C2 = 1 1+ n 3 1- n R2 ò w(r )r 2 dr , R1 R13 R23 - R13 R2 ò w(r )r 2 dr . (56) R1 В пределе R1 ® 0 , т.е. для сплошного шара, имеем C1 = s rr = - 1 - 2n 2 1 - n R23 2 E 1 3 1- n r3 1 1+ n 1 u= 3 1- n r 2 r ò 0 R2 ò w(r )r 2 dr , C 2 = 0 , 0 r ò 0 w(r )r 2 dr + 2 E 2 3 1 - n R23 2 1 - 2n 1 w(r )r 2 dr + r 3 1 - n R23 R2 ò R2 ò w(r )r 2 dr , (57) 0 w(r )r 2 dr . 0 Несложно заметить, что радиальные напряжения максимальны в центре сплошного шара, а перемещения в центре сплошного шара равны нулю, так как r ö æ ç 1 2 ÷ lim ç w(r )r dr ÷ = lim w(r )r = 0 . r ®0ç r 2 ÷ r ®0 0 ø è ò 2.6. Напряжения в составных телах 2.6.1. Составная пластина Пусть требуется исследовать напряженно-деформированное состояние пластины, состоящей из двух слоев с толщинами h1 и h2 . Свойства слоев обозначим соответственно индексами «1» и «2». Как и в задаче с однослойной пластиной, в условиях однородного нагрева или изотермического отжига логично предположить, что угловые деформации и сдвиговые напряжения равны нулю, а оставшиеся – меняются только в направлении оси, перпендикулярной поверхности пластины. Кроме того, равны нулю и напряжения в этом направлении. Так что имеем e xx = e xx ( x ) , e yy = e zz = e( x ) , 40 s yy = s zz = s( x ) . В этом случае мы можем воспользоваться уже найденным решением (29), но во всех коэффициентах, через которые определяются постоянные С1 и С2, интегрирование должно идти по всей толщине пластины от 0 до h = h2 + h1 . Имеем e = Ax + B , w E E ( Ax + B ) , s= + (58) 3 1- n 1- n 11+ n 2n e xx = we, 3 1- n 1- n где Nb - Ma Ng - Mb A= 2 , B=- 2 , b - ga b - ga h1 N= ò E 1 1 w1 ( x ) 1 dx + 3 1 - n1 3 h1 + h2 ò 0 h1 M = w2 ( x ) h1 h1 + h2 ò ò E 1 1 w1 ( x )x 1 dx + 3 1 - n1 3 0 h1 a= ò 0 E1 dx + 1 - n1 h1 + h2 g= ò 0 h1 E2 dx , b = 1 - n2 ò E1 2 x dx + 1 - n1 ò h1 h1 ò h1 w2 (x )x (59) E2 dx , 1- n2 E1 xdx + 1 - n1 0 h1 + h2 h1 E2 dx , 1- n2 h1 + h2 ò h1 E2 xdx , 1- n2 (60) E2 2 x dx . 1- n2 Если в пределах каждого слоя свойства – постоянны, интегралы в a, b, g легко берутся. В любом случае характер напряженнодеформированного состояния пластины будет зависеть от соотношения свойств слоев. 2.6.2. Двухслойный цилиндр Пусть требуется исследовать напряженно-деформированное состояние полого цилиндрического образца с покрытием, находящегося в условиях однородного нагрева с боковой поверхности или в условиях изотермического отжига, сопровождаемого перераспределением легирующих элементов. Радиус полости - R1 , радиус внутреннего цилиндра R2 , а внешнего - R заданы. Предположим, что распределение температуры или концентраций – известно, а контакт между слоями – идеальный. Последнее означает, что при 41 r = R2 равны радиальные перемещения u и радиальные компоненты тензора напряжений s : r = R2 : u1 = u 2 , s1 = s 2 . (61) Внутренняя и внешняя поверхности цилиндра свободны от напряжений, т.е. r = R1 : s1 = 0 ; (62) r = R : s2 = 0 . (63) Дополнительно предположим, что положение торцы цилиндра фиксировано, так что u z = 0, e zz = 0 . Если торцы цилиндра свободны от нагрузки, потребуется дополнительное условие отсутствия осевой нагрузки для определения постоянной величины e zz = const (см. раздел 4). Эту задачу можно решать в напряжениях или в перемещениях. При решении задачи в перемещениях уравнения равновесия для каждого из слоев имеют вид (38), так что сразу можем записать общее решение 1 1 + n1 1 3 1 - n1 r u1 = r ò R1 r 1 1+ n2 1 3 1- n2 r u2 = w1 (r )rdr + ò w(r )rdr + R2 A1 B r+ 1, r 2 A2 B r+ 2 . r 2 (64) Четырех условий (61) – (63) достаточно для нахождения четырех постоянных интегрирования. Чтобы ими воспользоваться, найдем радиальные и тангенциальные деформации: r ù é 1 1 + ni ê 1 ú A B w(r ) - 2 w(r )rdr ú + i - 2i , e rr ,i º e i = ê 3 1 - ni 2 r r ú ê Ri û ë ò e qq,i 1 1 + ni 1 = 3 1 - ni r 2 r ò w(r )rdr + Ri Ai Bi + , 2 r2 (65) а затем - радиальные напряжения 1 E1 1 s1 = 3 1 - n1 r 2 1 E2 1 s2 = 3 1- n2 r 2 r ò w1 (r )rdr + R1 r ò R2 w(r )rdr + E1 A1 E1 B1 (1 - 2n1 )(1 + n1 ) 2 (1 + n1 ) r 2 E2 A2 E 2 B2 (1 - 2n 2 )(1 + n 2 ) 2 (1 + n 2 ) r 2 (66) 42 Следовательно, система уравнений для нахождения постоянных интегрирования примет вид E1 A1 E1 B1 = 0, (1 - 2n1 )(1 + n1 ) 2 (1 + n1 ) R12 1 1 + n1 1 3 1 - n1 R2 1 E1 1 3 1 - n1 R2 2 = R2 ò R2 ò w1 (r )rdr + R1 w1 (r )rdr + R1 A1 B A B R2 + 1 = 2 R2 + 2 , R2 R2 2 2 E1 A1 E1 B1 = (1 - 2n1 )(1 + n1 ) 2 (1 + n1 ) R2 2 (67) E2 A2 E2 B2 , (1 - 2n 2 )(1 + n 2 ) 2 (1 + n 2 ) R2 2 1 E2 1 3 1- n2 R2 R ò w2 (r )rdr + R2 E2 A2 E 2 B2 . (1 - 2n 2 )(1 + n 2 ) 2 (1 + n 2 ) R 2 Система уравнений решается стандартным способом. Решение удобно представить в форме Db + Cx Da + Cg , A2 = , A1 = gb - ax gb - ax A1 R12 1 1+ n2 B1 = , B2 = 3 1- n2 2 1 - 2n1 R ò R2 A2 R 2 w2 rdr + , 2 1 - 2n 2 (68) где a= g= R12 R2 2 + , b = R2 + , 1 - 2n1 1 - 2n 2 E2 R22 - R12 , x = R22 - R 2 , (1 - 2n 2 )(1 + n 2 ) R22 E1 (1 - 2n1 )(1 + n1 ) ( ) ( R2 R ù é ( 1+ n2 ) 2 ê (1 + n1 ) ú C= ê w1rdr w2 rdr ú , (1 - n 2 ) 3 (1 - n1 ) úû êë R1 R2 R2 R ù é E2 2 ê E1 ú D=- ê w1rdr w2 rdr ú . (1 - n 2 ) 3 (1 - n1 ) úû êë R1 R2 ò ò ò ò ) (69) 43 Так как постоянные интегрирования известны, можем определить все компоненты тензоров напряжений и деформаций, отличные от нуля. Дополнительно к (64) – (66) имеем: s qq,i = Ei 1 3(1 - n i ) r 2 r ò wi (r )rdr - Ri s zz ,i = - Ei wi Ei Ai Bi Ei , + + 1 - n i 3 (1 - 2n i )(1 + n i ) 2 (1 + n i )r 2 Ei n i Ei wi (r ) + A. (1 - 2n i )(1 + n i ) i 3(1 - n i ) (70) 2.7. Примеры заданий 2.7.1. Общие рекомендации Принципиально невозможно предложить единый рецепт для решения всех задач теории упругости, термоупругости, массоупругости на все случаи жизни. Формулировка и ход решения задач зависят от конкретных условий, для которых требуется сформулировать задачу, и от целей исследования. Общая последовательность действий должна состоять из следующих этапов**. 1. Решение задачи следует начинать с анализа всех сил, действующих на тело. Необходимо выявить природу этих сил, точку приложения, направление действия и зависимость от координат. 2. Далее следует проанализировать топологию задачи, т.е. геометрическую форму тела и свойства симметрии. Отсюда выбирается удобная система координат, такая, в которой составляющие уравнения равновесия и граничные условия будут иметь наиболее простой вид. Для наглядности полезно сделать рисунок. 3. С учетом геометрии задачи и направления действия сил нужно определить направления деформаций и координаты, от которых зависят компоненты вектора смещения. 4. Записать уравнения равновесия для тех компонент вектора смещения, которые необходимо определить. При этом нужно учесть свойства симметрии задачи и сделать сравнительную оценку членов полученных уравнений. Решение может существенно упроститься, если пренебречь слагаемыми более высокого порядка малости. 5. Задать граничные условия с учетом симметрии задачи, действующих объемных сил и вызываемых ими внутренних напряжений. 6. Выбрать метод решения полученных дифференциальных уравнений, точный или приближенный с требуемой точностью. 7. Проанализировать полученный результат, т.е. рассмотреть представляющие интерес частные случаи, выявить физические следствия, найти известные аналогии в механике, сравнить с экспериментом, оценить ** Черняк, Суетин 44 прикладное значение и т.д. Для практических приложений важное значение имеет качественное сравнение с экспериментом, непротиворечивость выводов теории здравому смыслу и физическим законам. Если для решения задачи или для анализа полученного решения выбран численный метод, то перед составлением программы следует продумать алгоритм численного решения и составить блок-схему. 2.7.2. Задания 1. Исследовать влияние зависимости модуля упругости материала от температуры на эволюцию поля напряжений и деформаций в пластине при ее нагреве тепловым потоком, равномерно распределенным по ее поверхности. В качестве объектов исследования выбрать пластины, изготовленные, например, из железа, меди и титана. 2. Исследовать эволюцию поля напряжений в двухслойной пластине (например, титан-железо; железо-медь, никель-медь) при ее нагреве тепловым потоком постоянной интенсивности. Свойства металлов считать постоянными (вычислить как среднеинтегральные значения в интересующем диапазоне температур). 3. Исследовать эволюцию поля напряжений в пластине, изготовленной из композиционного материала типа «матрица-включения» при варьировании доли включений в условиях нагрева постоянным потоком. Коэффициент теплопроводности и модуль упругости композита рассчитывать из соотношений l= l p h + l m (1 - h) , E= E p h + Em (1 - h) или 1 1 l-1= l p h + l m (1 - h) , E -1= E p -1h + Em -1 (1 - h) 4. Исследовать эволюцию поля напряжений в тонком круговом диске, изготовленном из композиционного материала типа «матрица-включения» при варьировании доли включений в условиях нагрева потоком, в котором энергия распределена по заданному закону. Коэффициент теплопроводности и модуль упругости композита рассчитывать из соотношений l = l p h + l m (1 - h) , E = E p h + Em (1 - h) или l-1 = l p -1h + l m -1(1 - h) , E -1 = E p -1h + Em -1 (1 - h) 5. Исследовать влияние характера распределения энергии в потоке на эволюцию полей напряжений и деформаций в тонком диске с учетом и без учета зависимости модуля упругости от температуры. 45 6. Исследовать эволюцию поля напряжений в двухслойной пластине (материал-покрытие) в условиях изотермического отжига в результате перераспределения легирующего элемента при варьировании толщины покрытия и коэффициента диффузии. Последнее условие может быть связано с величиной температуры отжига. 7. Исследовать эволюцию полей напряжений и деформаций в плоском образце при его насыщении легирующим элементом из окружающей среды (где он находится в избытке) для различного характера зависимости коэффициента диффузии от концентраций. 8. Исследовать влияние параметров импульсного теплового потока, в котором энергия распределения по заданному закону, на эволюцию полей напряжений и деформаций при нагреве тонкого диска. 9. Исследовать эволюцию полей напряжений и деформаций в полом цилиндрическом образце, находящимся в среде с температурой, меняющейся по заданному закону. 10. Исследовать эволюцию полей напряжений и деформаций в полом цилиндрическом образце со свободными торцами, который насыщается примесью из окружающей среды с постоянным коэффициентом диффузии и с коэффициентом диффузии, зависящим от концентраций. 11. Исследовать эволюцию полей напряжений и деформаций в полом цилиндрическом образце с фиксированным положением торцов, который насыщается примесью из окружающей среды с постоянным коэффициентом диффузии и с коэффициентом диффузии, зависящим от концентраций. 12. Исследовать эволюцию полей напряжений и деформаций при отжиге длинного полого цилиндрического образца с покрытием вследствие перераспределения легирующего элемента из покрытия. Считать, что свойства материалов покрытия и основной детали – постоянные, торцы цилиндра неподвижно фиксированы. 13. Исследовать эволюцию полей напряжений и деформаций в сферической частице, находящейся в окружающей ее матрице вследствие образования переходного диффузионного слоя в условиях изотермического отжига. Контакт между частицей и матрицей считать идеальным; свойства материалов – постоянными. 14. Исследовать эволюцию полей напряжений и деформаций в сферической металлической частице, покрытой слоем окисла (или оболочкой) вследствие диффузии примеси, находящейся в окружающей среде в избытке. Контакт между частицей и оболочкой считать идеальным. 46 15*. Исследовать эволюцию полей напряжений и деформаций в плоском образце, в котором может протекать обратимый фазовый переход, в условиях периодического нагрева. Приложения Выражения для деформаций через перемещения: Декартова система координат (рис. 1), u = ux , u y , uz : ( ) ¶u y ¶u x ¶u , e yy = , e zz = z , ¶x ¶z ¶y y 1 æ ¶u x ¶u y ö 1 æ ¶u z ¶u y ö ç ç ÷ ÷, + + = = e , e x xy zy ¶x ÷ø ¶z ÷ø 2 çè ¶y 2 çè ¶y Рис. 1. ¶u ö 1 æ ¶u e xz = ç x + z ÷, ¶x ø 2 è ¶z Цилиндрическая система координат (рис. 2) z e xx = ( e rz ) u = ur , uj , u z : ¶u ¶u 1 ¶uj ur + , e zz = z , e rr = r , ejj = ¶r ¶z r ¶j r ¶ æ uj ö ö 1 æ 1 ¶ur 1 æ ¶uj 1 ¶u z ö 1 æ ¶u ¶u ö ÷, + r çç ÷÷ ÷÷, ejz = çç + = ç z + r ÷ , e rj = çç ¶r è r ø ø 2 è r ¶j 2 è ¶z r ¶j ÷ø 2 è ¶r ¶z ø z z r dz x Q (r ,j , z ) z dr dr dQ y j (r ,Q,j ) r j x dj Рис.2. dj Рис.3. ( ) Сферическая система координат (рис.3), u = ur , uj , uq : ¶ur , ¶r 1 ejj = r sin q e rr = 1 ¶uq ur + , r ¶q r ¶uj ur uq ctgq + + , ¶j r r eqq = y 47 1 æ ¶uj 1 ¶ur uj ö 1 æ 1 ¶ur ¶uq uq ö - ÷÷, + - ÷, ejr = çç + e rq = ç r ø 2 è ¶r r sin q ¶j ¶r r ø 2 è r ¶q 1 æ 1 ¶uq 1 ¶uj uj ctgq ö ÷. + ejq = çç r ÷ø 2 è r sin q ¶j r ¶q Уравнения равновесия Для декартовой системе координат уравнения представлены в части 1, раздел 1.3 (уравнения (14)). Цилиндрическая система координат ¶s rr 1 ¶s rq ¶s zr s rr - s qq + + + + Kr = 0 , ¶r r ¶q ¶z r ¶s rq 1 ¶s qq ¶s qz 2s rq + + + + Kq = 0 , ¶r r ¶q ¶z r ¶s rz 1 ¶s qz ¶s zz s rz + + + + Kz = 0. ¶r r ¶q ¶z r Сферическая система координат ¶s rr 1 ¶s rq 1 ¶s rj 2s rr - s qq - s jj + s rj ctgj + + + + Rr = 0 , r sin j ¶q r ¶j r ¶r ¶s qr 1 ¶s qq 1 ¶s qj 3s qr + 2s qj ctg j + + + + Rq = 0 , ¶r r sin j ¶q r ¶j r ¶s jr 1 ¶s jq 1 ¶s jj s jj - s qq ctg j + 3s rj + + + + Rj = 0 . ¶r r sin j ¶q r ¶j r ( )