Q f Df Dy Dx x
advertisement

III Всероссийская конференция «Радиолокация и радиосвязь» – ИРЭ РАН, 26-30 октября 2009 г.
ВЛИЯНИЕ ДЕКОРРЕЛЯЦИОННЫХ ФАКТОРОВ НА
ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ ГЛУБИН
ИНТЕРФЕРОМЕТРИЧЕСКИМ ГИДРОЛОКАТОРОМ БОКОВОГО
ОБЗОРА
Смольянинов В.М., Смольянинов И.В.. ИРЭ им. В.А. Котельникова РАН.
На основе общей модели отраженных от шероховатой поверхности сигналов [1] получены
соотношения для оценок погрешностей измерения глубин интерферометрическим гидролокатором
бокового обзора (ГБО), вызванных декорреляцией колебаний в каналах приемника из-за
пространственного разноса антенн. Скорректированы известные из [1], [2] модели колебаний и
алгоритмы их обработки для более эффективного подавления аддитивных помех при увеличении
измеряемых глубин.
При измерении больших глубин интерферометрическим ГБО увеличение антенной базы и
базы зондирующего сигнала уменьшает погрешности вычисления глубин, обусловленные
аддитивными помехами. Однако расширение полосы зондирующих сигналов и антенной базы
приводит к декорреляции колебаний в каналах приемника и росту систематических
погрешностей измерения глубин интерферометрическим ГБО. Настоящая работа посвящена
анализу декорреляционных погрешностей и поиску подходов, допускающих расширение
антенной базы и полосы зондирующих сигналов за пределами, определенными условием
пространственно-временной узкополосности измерительной системы [1].
Исследования выполняем применительно к интерферометрическим ГБО с узкой
диаграммой направленности вдоль линии движения судна, использующими в качестве
зондирующего сигнал с линейной частотной модуляцией (ЛЧМ) на центральной частоте f 0 ,
длительностью Tc и девиацией частоты F , а на входе приемника – согласованные с ЛЧМ
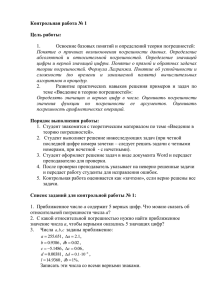
сигналом фильтры[2]. Для вычисления глубин в таких системах, без учета рефракции
применима геометрия, представленная на рисунке 1.
Dx
2
Q
1
f
Df
R
x
Dy
Рис. 1. Геометрия вычисления глубин интерферометрическим
ГБО.
239
III Всероссийская конференция «Радиолокация и радиосвязь» – ИРЭ РАН, 26-30 октября 2009 г.
Отражающую поверхность считаем шероховатой. Для нее в [1] дана в общем виде модель
отраженных сигналов. Используя результаты этой работы для комплексных огибающих Z 1 (t )
и Z 2 (t ) на выходе согласованных фильтров в случае однозначной поверхности, находящейся в
дальней зоне, можно получить соотношения:
Z 1 (t ) h( ) s (t ) exp{ j 2f 0 }d
Z 2 (t ) h( ) s [t
x
x
( )] exp{ j 2f 0 [
( )]}d ,
V
V
(1)
где s (t ) - нормированная автокорреляционная функция (АКФ) зондирующего сигнала,
( ) sin[ ( )] , а функция h( ) - реализация -коррелированного нормального
случайного процесса. Функция h2 ( ) | h( ) | 2 полагается медленно меняющейся. В этом
случае Z i (t ) есть реализация гауссовского процесса с нулевым средним и дисперсией
Z2 (t ) | Z i (t ) | 2 пропорциональной h2 (t ) , а нормированная корреляционная функция
отсчетов Z 1 (t1 ) и Z 2 (t 2 ) может быть представлено в виде:
Z (t1 )Z * (t 2 )
x
12 (t1 , t 2 )
exp{ j 2
(t1 )} p (t1 , t 2 )} ,
(2)
2
z (t1 )
p(t1 , t 2 ) 1 измеренная разность фаз между отсчетами Z 1 (t1 ) и Z 2 (t 2 ) ,
x
соответствовало бы точному значению (t1 ) 2
(t1 ) в отсутствии помех. Отличие от
При
единицы приводит к погрешностям измерений, то есть погрешности измерений зависят от
декорреляционного коэффициента p p(t1 , t 2 ) . Декорреляция за счет временного сдвига
отсчетов названа временной, а за счет вариации фазы в показателе экспоненты (1) – фазовой.
На входе приемника наряду с сигнальными компонентами (1) присутствуют аддитивные
помехи в виде независимых реализаций белого гауссового шума, порождающих на выходах
согласованных фильтров колебания n1 (t ) и n2 (t ) .
Если (t ) измерена со стандартным отклонением , то стандартные отклонения величин
и равны:
x
2
| ' ( ) | | cos( ) |
(3)
Отсчеты колебаний Y1 (t1 ) Z 1 (t1 ) n1 (t1 ) и Y2 (t 2 ) Z 2 (t 2 ) n 2 (t 2 ) взятые в моменты
времени t1 и t 2 при оговоренных условиях эквивалентны двум отсчетам Y1 и Y2 из
стационарного нормального случайного процесса, статистические свойства которых изучены в
[3], в частности, получено одномерное распределение разности фаз. В нашем случае параметры
распределения определяются коэффициентом декорреляции p и дисперсией помеховых
компонент. Численный анализ показал, что при p 1 дисперсия случайной погрешности
2 (q )
за
счет
аддитивных помех
2
аппроксимирована выражением
для
отношения
1 q
Z2
10 6
2
n
может
быть
3
. В отсутствии помех и p 1 оценка разности фаз
q
240
III Всероссийская конференция «Радиолокация и радиосвязь» – ИРЭ РАН, 26-30 октября 2009 г.
может быть смещенной при комплексном p , а её случайная составляющая равна погрешности
в аддитивной помехе с эквивалентным отношением q Э
(t ) (t )
При
для
| |
1
F
имеет
| p|
.
1 | p |
место
временная
декорреляция
и
декорреляционный коэффициент при ЛЧМ сигнале с достаточно большой базой может быть
представлен в виде :
sin(u )
,
(4)
u
x
где u [t1 t 2
(t1 )]F . При | u | 1 оценка величины (t1 ) будет не смещенной и
V
p ( t1 , t 2 )
погрешность из-за временной декорреляции будет равна погрешности в аддитивной помехе с
эквивалентным отношением сигнал-помеха q Э .
Численный анализ зависимости (u ) показал, что для значений | u |
1
эта зависимость
2
1
величина . Дальнейшее увеличение | u |
2
2
приводит к резкому возрастанию . Полагая допустимым стандартное отклонение в 90 ,
получаем ограничение на допустимое значение величины u :
1
| u | .
(5)
2
является почти линейной
и при | u |
При выполнения условия пространственно-временной узкополосности [1] измерение
разности фаз осуществляется в одновременно взятых отсчетах ( t1 t 2 ). При этом
F x
F x
| (t1 ) |
, а граница (5) переходит при произвольном t1 в границу:
f0
f0
x F 1
,
f0 2
| u |
(6)
которую можно считать уточненным условием пространственно-временной узкополосности.
Это условие не зависит от глубины и ставит ограничение на допустимое произведение полосы
сигнала на размер антенной базы и, тем самым, на возможности подавления аддитивных помех
при измерении больших глубин.
Эти ограничения можно значительно ослабить, положив:
t 2 t1
x
( t1 ) .
V
(7)
В этом случае имеет место в основном фазовая декорреляция. При численном анализе
декорреляционного коэффициента каждой задержке t сопоставляется на отражающей
поверхности линейный участок (рис.1), находящийся на расстоянии R от антенн под углом
к горизонтали, и размером, соответствующим разрешающей способности зондирующего
сигнала. Для получения качественных выводов, функции s2 ( ) аппроксимировалась
прямоугольником шириной | |
1
.
F
Анализ показал, что для углов | | 2
f 0
декорреляционный коэффициент имеет
RF
вид (4), где:
241
III Всероссийская конференция «Радиолокация и радиосвязь» – ИРЭ РАН, 26-30 октября 2009 г.
u
x f 0
ctg ( ) cos( ) .
(8)
2 R F
При | u | 1 оценка разности фаз будет не смещенной, а поведение (u ) в зависимости от
u будет такой же как и в предыдущем случае с эквивалентным отношением сигнал-помеха q Э ,
2
R F
. С учетом ограничения на величину | | , вместо условия
пропорциональным
x f 0
(6) получаем условие:
x
F R
,
2
f0
(9)
которое допускает расширение антенной базы и полосы сигнала по сравнению с (6) и тем
больше, чем больше измеряемая глубина. Отметим также, что с ростом глубины расширяется
диапазон углов ( ) , для которых был сделан анализ.
Для отражающего участка, перпендикулярного направлению на антенны ( ) имеет
место неоднозначность, так как положительным и отрицательным угловым приращениям
соответствуют положительные приращения по дальности. Декорреляционный коэффициент p
в общем случае комплексный, в следствии чего, оценка разности будет смещенной. Как
показал численный анализ, погрешности измерений будут незначительны лишь при:
2
x f 0
| cos( ) | 1
F R
В остальных случаях погрешности будут аномально высокими.
В целом, анализ полученных соотношений показал, что для наиболее вероятных ситуаций,
когда линейный отражающий участок размером, соответствующий разрешающей способности
по дальности зондирующего сигнала, отклонен от перпендикуляра к направлению на антенны
на угол превышающий 2
f0
, и моменты взятия отсчетов из колебаний на выходе
F R
согласованных фильтров скорректированы в соответствии с (7) декорреляционные
погрешности носят случайный характер и равны погрешностям в аддитивном шуме с
2
R F
. Для описания
эквивалентным соотношением сигнал-помеха пропорциональным
x f 0
выходных колебаний в каналах приемника может быть использована модель:
Y1 (t ) Z э (t ) n1 (t ) n1э (t );
Y2 [t
x
x
(t )] Z э (t ) exp{ j 2
(t )} n2 (t ) n2 э (t ) ,
V
(10)
где все составляющие представляют собой реализации независимых гауссовских процессов с
нулевым средним.
В соответствии с этой моделью разность фаз должна вычисляться между смещенными во
времени отсчетами выходных колебаний. Такой подход по сравнению со случаем взятия
синхронных отсчетов позволяет увеличить антенную базу и полосу зондирующих сигналов с
ростом исследуемой глубины и уменьшить погрешности измерений, обусловленных
аддитивными помехами.
Для отражающих участков поверхности, перпендикулярных направлению на антенны,
декорреляция обусловлена локальной неоднозначностью и вызывает аномальные ошибки
измерений. С ростом глубины вероятность появления аномальных ошибок подает. Тем не
менее, необходимо производить контроль качества измерений для обнаружения
242
III Всероссийская конференция «Радиолокация и радиосвязь» – ИРЭ РАН, 26-30 октября 2009 г.
неоднозначности рельефа дна, которые могут иметь не только локальный характер. Для
контроля могут быть использованы либо дополнительные антенны, либо, при ориентации на
поверхности с медленным изменением рельефа, несколько пар соседних отсчетов при
соответствующей аппроксимации функции (t ) .
Литература.
1. Фалькович С.Е., Пономарев В.И., Шарко Ю.В. «Оптимальный прием
пространственно-временных сигналов в каналах с рассеянием», «Радио и
Связь», Москва, 1989.
2. Каевицер В.И., Разманов В.М., Кривцов А.П., Смольянинов И.В., Долотов С.А.
«Дистанционное зондирование морского дна акустическими сигналами с
линейной частотной модуляцией». – Радиотехника, 2008, № 8.
3. Левин Б.Р. «Теоретические основы статистической радиотехники», Том 1,
«Советское радио», Москва, 1969.
4. Xavier Lurton, «Swath Bathymetry Using Phase Difference: Theoretical Analysis of
Acoustical Measurement Precision», IEEE J. Oceanic Eng., Vol. 25, № 3, July 2000.
243