Ю.М. Король, В.С. Крутиков, О.Н. Рудько УДК 629.5.015.2 О
advertisement

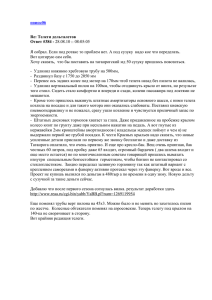
Ю.М. Король, В.С. Крутиков, О.Н. Рудько УДК 629.5.015.2 О-72 Ю.М. Король, доц., канд. техн. наук; В.С. Крутиков, д-р техн. наук; О.Н. Рудько, ассистент ХФ НУК Национальный университет кораблестроения, г. Николаев ОСОБЕННОСТИ МОДЕЛИРОВАНИЯ РАБОТЫ ВИНТОРУЛЕВЫХ КОМПЛЕКСОВ В СРЕДЕ FLOW VISION Исследовано влияние задаваемых параметров на моделирование работы винторулевого комплекса в CFD-пакете Flow Vision. Проанализированы полученные результаты и даны практические рекомендации для моделирования подобных задач во Flow Vision. Досліджено вплив параметрів на моделювання роботи гвинто-рушійного комплексу у CFDпакеті Flow Vision. Проаналізованo отримані результати і подані практичні рекомендації для моделювання подібних задач у Flow Vision. Influence of set parameteres on modelling of work of the screw-helmsman system in CFD-package Flow Vision is investigated. The received results are analysed and practical recommendations for modelling of similar problems in Flow Vision are made. Ключевые слова: винторулевой комплекс, физический эксперимент, метод имитационного моделирования, вычислительная эффективность, твердотельная модель, шаг по времени. Постановка проблемы. Движительно-рулевой комплекс (ДРК) является основным источником сил, приводящих судно в движение. При его выборе и проектировании приходится руководствоваться не только необходимостью обеспечить судну заданные маневренные качества, но и рядом других требований, связанных с обеспечением ходкости судна, с условиями размещения ДРК и т. д. [2]. Поэтому задача выбора оптимального ДРК для проектируемого судна требует обширных, трудоeмких экспериментальных исследований ввиду большого числа варьируемых параметров (характеристик гребного винта, руля, кронштейна и их взаимного расположения). Одним из методов исследования ДРК судна является физический эксперимент, который проводится в опытовом бассейне, аэродинамической или кавитационной трубе. Это один из классических методов, позволяющий получить достоверные результаты характеристик ДРК при различных углах перекладки руля, скорости набегающего потока и частоте вращения гребного винта, однако достаточно трудоемкий и дорогостоящий. Теоретические методы исследования действия ДРК, как средства управления судном, эффективны для малых углов атаки и коэффициентов нагрузки гребных винтов. В частности, вихревая теория [1] требует больших ресурсов, однако недостаточно точно учитывает форму гребного винта, вязкостные составляющие и применима лишь при больших поступях гребного винта и малых углах перекладки руля. Еще одним способом исследований ДРК является метод имитационного моделирования. Реализованные в CFD-пакете программ методы вычислительной Ю.М. Король, В.С. Крутиков, О.Н. Рудько КОРАБЛЕБУДУВАННЯ гидродинамики [5] связывают воедино теоретическую и экспериментальную гидроаэродинамику и являются эффективным средством моделирования реальных течений. Одним из таких пакетов является Flow Vision. Цель данной работы – исследование особенностей моделирования винторулевого комплекса в среде Flow Vision для достижения максимальной вычислительной эффективности и соответствия получаемых результатов данным натурного эксперимента. Основной материал. Базовыми уравнениями для программного комплекса Flow Vision служат уравнения Навье-Стокса (Рейнольдса), неразрывности и выбираемой модели турбулентности. Для численного решения уравнений гидродинамики используются метод конечных объемов и метод, основанный на консервативных схемах расчета нестационарных уравнений в частных производных [3]. Получаемые результаты моделирования задач гидродинамики в среде Flow Vision достаточно хорошо согласуются с результатами физического эксперимента при определенных задаваемых параметрах моделирования – начальных значениях, граничных условиях, степени и виде адаптации, размерах расчетной области, схеме расчета, шага по времени и др. В ходе численного моделирования исследовалось влияние на результаты расчета: шага по времени, выбранной модели турбулентности; выбираемой схемы расчета; степени и вида адаптации сетки. Тестирование полученных результатов проводилось путем сравнения сил и моментов, действующих на ДРК, с данными физического эксперимента.*) В аэродинамическую трубу c поперечным сечением 2,5 м×3,0 м был помещен движительно-рулевой комплекс, состоящий из гребного винта, руля, кронштейна и привода (четырехлопастной гребной винт серии В4.40 диаметром 0,8 м/с, шаговым отношением 0,95, дисковым отношением 0,4; руль с профилем NACA0020, средняя хорда – 0,667м. Исследовалось влияние частоты вращения гребного винта, углов перекладки руля и скорости потока на силы и моменты, действующие на элементы ДРК. Для проведения численного эксперимента с помощью инструментов программы Solid Works были построены твердотельные модели руля, кронштейна, привода, гребного винта соответствующих размеров. В ходе создания проекта в программном комплексе Flow Vision в бокс, имеющий форму параллелепипеда, при помощи фильтра подвижного тела были помещены элементы ДРК, соответствующие физическому эксперименту. Расставлены граничные условия Вход, Выход, Стенка. Также задавались угол перекладки руля, частота вращения движителя и скорость набегающего потока. Математическая модель движения жидкости представляет собой совокупность уравнений, для решения которых используется метод конечных объемов. В этом методе уравнения интегрируются по объему каждой ячейки расчетной сетки и по отрезку времени (шаг по времени) [3]. В Flow Vision имеется возможность *) Mollard, A. F. The design, construction and calibration of a thrust and torque dynamometr for a wind tunnel propeller model [Text] / A. F. Mollard, S. R. Turnock, University of Southampton // Ship Science Report. – 1990–1994. – № 44, 45, 49–52, 57, 80, 94. Ю.М. Король, В.С. Крутиков, О.Н. Рудько расчета этих уравнений явным и неявным алгоритмом (скошенная и неявная схема). В ходе проведения ряда экспериментов было установлено, что для моделирования винторулевых комплексов приемлема неявная схема расчета. Также возможен выбор модели турбулентности согласно специфике решаемой задачи. Для моделирования данной задачи исследовались модели турбулентности: стандартная k-ε; SST; SA. Первоначально была задана стандартная k-ε модель турбулентности. Проводился ряд экспериментов с различными шагами по времени при одних и тех же скорости потока, частоте вращения гребного винта и угле перекладки руля. В результате численных экспериментов обнаружено существенное влияние шага по времени на сходимость процесса расчета. Установлен предел величины шага, начиная с которого происходит численная неустойчивость решения. Представленные на рис. 1 зависимости демонстрируют влияние шага по времени на момент и упор гребного винта при скорости потока 10 м/с, частоте вращения гребного винта 2100 об/мин и угле перекладки руля 29,6°. Интерация – – – Интерация – – – – а б Рис. 1. Влияние шага по времени на сходимость расчета: а – шаг по времени 0,00079; б – шаг по времени 0,0025 (1, 2 – упор гребного винта соответственно без учета трения и с учетом; 3, 4 – момент гребного винта соответственно без учета трения и с учетом) Если для указанных условий шаг по времени равен или меньше 0,00079, то численное решение устойчиво и хорошо совпадает с экспериментальными значениями. На рис. 1,б наблюдается расходимость процесса после 200-й итерации с шагом по времени 0,0025. Кроме того, на этом же рисунке хорошо видно влияние сил трения на результаты расчета – момент с учетом трения больше, чем момент без учета трения. Для надежного моделирования винторулевого комплекса предлагается использовать время одного оборота как физическую величину, которая позволяет вычислить шаг по времени в зависимости от частоты вращения гребного винта и задать эту величину шага при моделировании во Flow Vision. Чем больше частота вращения гребного винта, тем меньше оптимальный шаг по времени. КОРАБЛЕБУДУВАННЯ Наиболее эффективной для решения данной задачи выступает модель турбулентности SA. Ниже представлены результаты моделирования работы винторулевого комплекса при скорости потока 10 м/с с частотой вращения гребного винта 2100 об/мин (рис. 2, 3). Отмечена достаточно хорошая согласованность результатов физического и численного экспериментов. С целью исследования влияния потока на вращающийся гребной винт с заданным углом перекладки руля были заданы слои визуализации Давле– – – – – – ние и Скорость. На рис. 4,а – представлена картина распределения давления на – поверхности гребного вин– та: повышенное давление на нагнетающей стороне, пониженное – на засасыРис. 2. Зависимость коэффициента подъемной силы руля вающей; на рис. 4,б – карот угла перекладки руля: тина распределения скоро••••• – физический эксперимент; – численный эксперимент стей при обтекании ДРК потоком воздуха. При исследовании , влияния степени и вида адаптации сетки (адаптация сетки по граничному , условию, адаптация сетки с заданием области адап, тации) наблюдалось следующее: некорректные резуль, таты при задании области адаптации в виде конуса , замечены в месте расположения гребного винта; повышение уровня – – – – адаптация по граничному условию Стенка, заданноРис. 3. Зависимость коэффициентов момента и упора му на поверхности гребгребного винта от угла перекладки руля: ного винта, практически ••••• – физический эксперимент; – численный эксперимент не влияет на результаты расчета. Моделирование работы винторулевого комплекса во Flow Vision характеризуется временем расчета – реальным временем протекания процесса моделирова- Ю.М. Король, В.С. Крутиков, О.Н. Рудько ния, а также временем работы компьютера, которое обычно колеблется от нескольких минут (для простых задач) до нескольких суток (для сложных задач) [4]. Критерием завершения расчета, как правило, является сходимость результатов. Вычислительная эффективность моделирования работы винторулевого комплекса во Flow Vision составляет 10^-6, в среднем на одну итерацию приходится 1,9 с. а б Рис. 4. Слои визуализации давления и скорости в среде Flow Vision: а – распределение давления на поверхности гребного винта; б – распределение скорости при обтекании ВРК потоком воздуха Выводы. 1. Обладая рядом преимуществ: сокращение времени проектирования, возможность проведения неограниченного количества исследований без затраты дополнительных ресурсов, возможность моделирования задачи в условиях, которые невозможно реализовать в аэродинамической трубе (что позволяет выявить новые направления исследований), – численный эксперимент во Flow Vision является эффективным инструментом для решения задач гидро- и аэродинамики, в частности судовых задач, наряду с классическими методами физического эксперимента. 2. Научная ценность данной работы состоит в исследовании параметров задачи моделирования винто-рулевых комплексов в среде Flow Vision, обеспечивающих максимальную вычислительную эффективность и сходимость процесса расчета, соответствие получаемых данных результатам физического эксперимента. Список использованной литературы 1. Басин, А. М. Теория и расчет гребных винтов [Текст] / А. М. Басин, И. Я. Миниович. – Л. : Судпромгиз, 1963. – 760 с. 2. Гофман, А. Д. Движительно-рулевой комплекс и маневрирование судна [Текст] / А. Д. Гофман. – Л. : Судостроение, 1988. – 360 с. 3. Кондранин, Т. В. Применение пакетов прикладных программ при изучении курсов механики жидкости и газа [Текст] : учеб. пособие / Т. В. Кондранин, Б. К. Ткаченко, М. В. Березникова, А. В. Евдокимов, А. П. Зуев. – М.: МФТИ, 2005. – 104 с. 4. Система моделирования движения жидкости и газа Flow Vision [Текст] : руководство пользователя. – М. : ООО "Тесис", 2007. 5. Anderson, John D. jr. Computational fluid dynamics. McGraw-Hill Series in Mechanical Engineering [Text] / John D. jr Anderson. – New York : R.R. Donnelley & Sons Company, 1995. – 547 p. Надійшла до редколегії 08.12.10 Статтю рекомендує до друку член редколегії ЗНП НУК д-р техн. наук, проф. В.О. Нєкрасов