Министерство образования и науки Российской Федерации
advertisement

Министерство образования и науки Российской Федерации
Федеральное государственное образовательное учреждение высшего профессионального образования «Сибирская государственная
автомобильно-дорожная академия (СибАДИ)»
На правах рукописи
Савельев Сергей Валерьевич
РАЗВИТИЕ ТЕОРИИ И СОВЕРШЕНСТВОВАНИЕ КОНСТРУКЦИЙ
ВИБРАЦИОННЫХ КАТКОВ С ПНЕВМОШИННЫМИ РАБОЧИМИ
ОРГАНАМИ
Специальность 05.05.04 – Дорожные, строительные
и подъѐмно-транспортные машины
Диссертация на соискание учѐной степени
доктора технических наук
Научный консультант:
доктор технических наук, профессор
Пермяков Владислав Борисович
Омск – 2014
2
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ……………………………………………………………………………. 6
1. СОСТОЯНИЕ ВОПРОСА В ОБЛАСТИ УПЛОТНЕНИЯ ГРУНТОВ.................. 14
1.1. Анализ процессов уплотнения грунтов различными способами………. 14
1.1.1. Анализ процесса статического уплотнения……………………….. 16
1.1.2. Анализ процесса вибрационного уплотнения………………........... 30
1.1.3. Анализ процесса трамбования………………………………............ 36
1.1.4. Анализ процесса комбинированного уплотнения…………............ 39
1.2. Выводы по главе…………………………………………………………... 41
2. АНАЛИЗ ТЕОРЕТИЧЕСКИХ ПРЕДПОСЫЛОК ИНТЕНСИФИКАЦИИ
ПРОЦЕССА УПЛОТНЕНИЯ ГРУНТОВ ДОРОЖНЫМИ КАТКАМИ…………... 44
2.1. Анализ влияния характеристик грунтов на интенсивность
процесса уплотнения………………………………………………………….. 44
2.1.1. Анализ влияния структурного состояния грунтов
на интенсивность процесса уплотнения…………………………….......... 45
2.1.2. Анализ влияния физико-механических свойств грунтов
на интенсивность процесса уплотнения………………………………….. 49
2.1.3. Анализ влияния минералогического состава грунтов
на интенсивность процесса уплотнения………………………………….. 63
2.1.4. Анализ влияния гранулометрического состава грунтов
на интенсивность процесса уплотнения…………………………….......... 66
2.2. Факторы, влияющие на интенсивность уплотнения грунтов…………….
69
2.2.1. Величина контактных напряжений………………………………… 69
2.2.2. Скорость деформирования уплотняемой среды……………........... 76
2.2.3. Влажность грунтов…………………………………………….......... 84
2.2.4. Количество проходов по одному следу…………………...….......... 91
2.2.5. Толщина уплотняемого слоя…………………………………..........
96
2.3. Выводы по главе…………………………………………………………… 109
3.
МАТЕМАТИЧЕСКОЕ
ДИНАМИЧЕСКОГО
МОДЕЛИРОВАНИЕ
ДЕФОРМИРОВАНИЯ
ПРОЦЕССА
УПЛОТНЯЕМОЙ
СРЕДЫ
3
ВИБРАЦИОННЫМИ
КАТКАМИ
С
ПНЕВМОШИННЫМИ
РАБОЧИМИ
ОРГАНАМИ…………………………………………………………………………... 112
3.1. Математическая модель элементарного упруговязкопластичного
столба грунтовой среды, деформируемой внешней периодической силой... 112
3.2. Математическая модель нескольких последовательно соединѐнных
элементарных упруговязкопластичных столбов грунтовой среды,
деформируемых внешней периодической силой…………………………….. 122
3.3. Математическая модель взаимодействия нескольких последовательно
соединѐнных элементарных упруговязкопластичных столбов среды с
пневмошинным рабочим органом катка посредством внешней
периодической силы…………………………………………………………….. 124
3.4. Выводы по главе ……………………..……………………………..……... 133
4.
ЭКСПЕРИМЕНТАЛЬНЫЕ
ИССЛЕДОВАНИЯ
ПАРАМЕТРОВ
ПНЕВМОШИННЫХ РАБОЧИХ ОРГАНОВ ВИБРАЦИОННЫХ КАТКОВ ДЛЯ
УПЛОТНЕНИЯ ГРУНТОВ.………………………………………………………….. 135
4.1. Общая методика проведения экспериментальных исследований............ 136
4.1.1. Планирование эксперимента для определения показателей
жѐсткости и вязкости пневмошинных рабочих органов………………… 138
4.1.2. Планирование эксперимента для определения степени влияния
жѐсткости рабочего органа на интенсивность процесса уплотнения…... 134
4.1.3. Методика обработки экспериментальных данных.…..…................ 139
4.2 Экспериментальные исследования показателей жѐсткости и вязкости
пневмошинных рабочих органов вибрационных катков…………………… 141
4.2.1. Исследования жѐсткости и коэффициента вязкого трения шины,
заполненной жидкостью………………………..…..................................... 143
4.2.2. Исследования жѐсткости и коэффициента вязкого трения
пневматической шины, оборудованной сменными металлическими
бандажами………………………………………………………………….. 147
4.2.3. Исследования параметров пятна контакта пневмошинных
рабочих органов с опорной поверхностью………………………............. 157
4
4.3. Выводы по главе…………………………………………………...…......... 170
5. ИССЛЕДОВАНИЯ ВЛИЯНИЯ ПНЕВМОШИННЫХ РАБОЧИХ ОРГАНОВ
КАТКОВ
НА
ИНТЕНСИВНОСТЬ
ПРОЦЕССА
ВИБРАЦИОННОГО
УПЛОТНЕНИЯ ГРУНТОВ …………………………………………………………. 171
5.1. Анализ результатов теоретических исследований……………............... 171
5.2. Оптимизация параметров вибрационных катков с пневмошинными
рабочими органами для уплотнения грунтов................................................... 186
5.3. Сравнительный анализ теоретических и экспериментальных данных
процесса уплотнения грунтов вибрационными катками…………………… 192
5.4. Исследования влияния жѐсткости рабочих органов катков на
значения виброускорений в виброуплотняемых грунтах…………………... 203
5.5. Анализ энергоэффективности вибрационных катков
с пневмошинными рабочими органами……………………………………… 212
5.5.1 Анализ энергоэффективности передачи вибрации
уплотняемой грунтовой среде…………………………………………….. 212
5.5.2 Сравнительный анализ эффективности уплотнения
грунтов вибрационными катками с пневмошинными рабочими
органами……………………………………………………………………. 214
5.6. Выводы по главе………………………..………………………………… 218
6. РЕАЛИЗАЦИЯ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ …………………............... 221
6.1. Методика выбора параметров вибрационных катков
с пневмошинными рабочими органами.…………………………………….. 221
6.1.1. Методика определения жѐсткости пневмошинных рабочих
органов вибрационных катков ……………………………………............ 221
6.1.2. Обоснование величины контактных напряжений при
уплотнении грунтов катками с пневмошинными рабочими органами… 225
6.1.3. Обоснование параметров вибрации катков с пневмошинными
рабочими органами………………………………………………………… 227
6.1.4. Обоснование рациональной скорости вибрационных катков
с пневмошинными рабочими органами…………………………............... 232
5
6.2. Разработка перспективных конструкций пневмошинных рабочих
органов вибрационных катков…………………………………………..…… 233
6.2.1. Вибрационный гидрошинный рабочий орган катка……………… 234
6.2.2. Пневмошинный рабочий орган катка с металлическими
бандажами …………………………………………………………………. 240
6.2.3. Виброимпульсный пневмошинный рабочий орган катка………… 245
6.2.4. Кулачковый пневмошинный рабочий орган дорожного катка…... 248
6.3. Технологические рекомендации по уплотнению грунтов
вибрационными катками с пневмошинными рабочими органами…………. 251
6.4. Выводы по главе……………………………………………………........... 257
ЗАКЛЮЧЕНИЕ……………………………………………………..………………… 258
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ………………………………………………………. 262
СПИСОК ЛИТЕРАТУРЫ ……………………………………………………………. 266
ПРИЛОЖЕНИЕ 1. ЛИСТИНГИ………………………...…………………................ 283
ПРИЛОЖЕНИЕ 2. АКТЫ ИСПЫТАНИЙ………………………………………….. 287
ПРИЛОЖЕНИЕ 3. РАСЧЁТ ЭКОНОМИЧЕСКОГО ЭФФЕКТА
ОТ ИСПОЛЬЗОВАНИЯ НОВОЙ ТЕХНИКИ……………………………................. 302
ПРИЛОЖЕНИЕ 4. ПРИМЕР РАСЧЁТА ПАРАМЕТРОВ ВИБРАЦИОННОГО
КАТКА С ПНЕВМОШИННЫМ РАБОЧИМ ОРГАНОМ………………………….. 310
ПРИЛОЖЕНИЕ 5. ПАТЕНТЫ……………………………………………................. 315
ПРИЛОЖЕНИЕ 6. АКТЫ ВНЕДРЕНИЯ……………………………………………. 320
6
ВВЕДЕНИЕ
Актуальность темы исследования. Необходимость создания высокопроизводительной дорожной техники, в том числе дорожных катков, являющихся основным средством для уплотнения и упрочнения дорожно-строительных материалов,
обусловливается острой необходимостью развития транспортной инфраструктуры. Общая протяжѐнность российской сети автодорог общего пользования федерального, регионального и местного значений оценивается Росавтодором в 1,1
млн км (в том числе протяжѐнность местных дорог — 0,5 млн км), что явно недостаточно для такой страны, как Россия (для сравнения: протяжѐнность автодорог США составляет 6,4 млн км, Индии — 3,4 млн км, Китая 1,9 млн км) [49, 98,
131].
Правительством РФ принята программа «Транспортная стратегия РФ на период до 2030 года» Общая протяжѐнность дорожной сети автодорог должна быть
увеличена в 1,5 раза. Уже сейчас на строительство и реконструкцию автомобильных дорог выделяются значительные средства, так с 2002 по 2010 год на развитие
автомобильных дорог уже было выделено 2,7 трлн рублей. В ближайшие годы через федеральный и региональные дорожные фонды планируется выделить в общей сложности около 8,4 трлн рублей. Размер Федерального дорожного фонда в
2013 году составил около 450 млрд рублей и увеличился по сравнению с 2012 годом (414,4 млрд рублей) на 10 процентов. Эти средства выделяются на строительство и модернизацию автодорожных магистралей, подходов к западным и южным
границам России, в том числе в рамках трансконтинентальных транспортных коридоров [129].
Решение поставленных задач невозможно без применения современных
строительных технологий, инновационных технических решений и высокопроизводительной строительной техники. Особое внимание при строительстве необходимо уделять производству работ по уплотнению грунтов земляного полотна, т. к.
именно вследствие этой операции обеспечивается необходимая долговечность и
работоспособность всей автомобильной дороги.
7
Можно вкладывать сколько угодно финансовых средств и применять самые
совершенные технологии при устройстве оснований и покрытий автодороги, но
если уплотнение грунтовых слоев земляного полотна было проведено некачественно, с отступлением от требований, то вся конструкция будет неустойчивой.
Недоуплотнение любого технологического слоя земляного полотна снижает показатели прочности и долговечности всей автомобильной дороги, а это в свою очередь приводит к огромным убыткам.
Наиболее распространѐнные машины осуществляющие уплотнение грунтов
земляного полотна – это дорожные катки различных типов. Наиболее эффективными, как в России, так и за рубежом, считаются вибрационные катки с металлическими вальцами, обладающие высокой производительностью и меньшей массой, в сравнении со статическими катками. Основной проблемой для любых дорожных катков является то, что они должны адаптировать свои параметры и
обеспечивать контактные напряжения для уплотнения грунтовых слоѐв от свежеотсыпанного состояния до нормативной плотности. Нормативные документы и
практика строительства рекомендуют производить уплотнение грунтовых слоѐв,
как минимум, двумя разными (по массе) катками. Всѐ это увеличивает энергоѐмкость и себестоимость строительства автомобильных дорог, снижает общий темп
работ. Задача создания уплотняющей техники, обеспечивающей уплотнение грунтов до требуемой плотности одной машиной, до сих пор не решена и это является
значительной научной проблемой.
Развитие теоретических основ взаимодействия рабочих органов катков с уплотняемой средой, разработка новых и перспективных рабочих органов уплотняющих средств являются актуальными задачами. Данное направление исследований в полной мере соответствует программе «Транспортная стратегия РФ на
период до 2030 года».
С 2009 г. и по настоящее время, диссертационные исследования по решению
научной проблемы создания перспективных рабочих органов катков и повышению эффективности уплотнения грунтов в строительстве поддерживаются грантом Министерства образования и науки РФ «Развитие теории виброуплотнения
8
упруго-вязких материалов катками с адаптивными рабочими органами» № государственной регистрации 01201055467.
Степень разработанности темы. Значительная часть исследований в области
уплотнения грунтов отечественными учѐными проводилась в СоюздорНИИ,
МАДИ, ХАДИ, СибАДИ и др. Здесь можно назвать таких известных учѐных, как
В. Ф. Бабков, О. Т. Батраков, Д. Д. Баркан, А. К. Бируля, И. И. Блехман, А. А. Борщевский, И. И. Быховский, С. А. Варганов, С. С. Вялов, Н. М. Герсеванов,
Г.
Ю. Джанилидзе, А. Е. Дубровин, М. В. Дудкин, С. В. Жиркович, А. В. За-харенко,
Н. Н. Иванов, А. С. Ильин, Я. А. Калужский, М. П. Костельов,
Г. В. Кус-
тарев, А. А. Малышев, Н. И. Наумец, Н. А. Островцев, В. Б. Пермяков, Г.Н. Попов, В. Н. Сорокин, И. С. Тюремнов, Н. Я. Хархута, Н. А. Цытович и др. За рубежом уплотнением грунтов занимались: L. Forssblad, К. Terzaghi, W. A. Lewis, W.
V. Ping, P. E. Guiyan Xing, Michael Leonard, Zenghai Yang, Michael A. Mooney, Robert V. Rinehart, Paulvan Susante и др. Вышеперечисленными учѐными разработаны теоретические основы уплотнения грунтов, исследованы и выявлены основные
закономерности взаимодействия рабочих органов (РО) уплотняющих машин с
деформируемой грунтовой средой. Существующие научные положения определяют дальнейшее направление развития теоретических исследований в области
повышения эффективности процесса уплотнения грунтов и создания перспективных конструкций уплотняющей техники.
Цель исследований: повышение эффективности использования вибрационных катков в процессе строительства земляного полотна автомобильных дорог.
Задачи исследований:
1) Провести анализ в области вибрационного уплотнения грунтов в строительстве, сформулировать проблемы и определить направления развития исследований;
2) Разработать математическую модель процесса динамического деформирования уплотняемой среды вибрационными катками с пневмошинными рабочими
органами;
9
3) Установить функциональные зависимости характеристик пневмошинных
рабочих органов от внутреннего давления в шинах и их конструктивных параметров, зависимости параметров пятна контакта от физико-механических свойств
грунта и количества проходов катка по одному следу;
4) Установить степень влияния жѐсткости пневмошинных рабочих органов
на интенсивность процесса уплотнения грунтов;
5) Определить влияние характеристик грунтов на развитие в них напряжѐннодеформируемого состояния в процессе их уплотнения вибрационными катками с
пневмошинными рабочими органами;
6) Разработать новые конструкции пневмошинных рабочих органов вибрационных катков;
7) Разработать методику для обоснования параметров виброкатков с пневмошинными рабочими органами;
8) Рассчитать экономическую эффективность использования результатов исследований.
Объект исследований: процесс уплотнения грунтов вибрационными катками
с пневмошинными рабочими органами.
Предмет исследования: закономерности взаимодействия пневмошинных рабочих органов вибрационных катков с уплотняемой грунтовой средой.
Научная новизна работы:
- разработана математическая модель взаимодействия нескольких последовательно соединѐнных элементарных упруговязкопластичных столбов среды с
пневмошинным рабочим органом вибрационного катка;
- получены зависимости жѐсткости с1 и коэффициента вязкого трения b1
пневмошинных рабочих органов от внутреннего давления и конструктивных параметров шин, позволяющие оценить энергоэффективность колебательных процессов за счѐт снижения диссипации энергии в шинах при изменении еѐ жѐсткости;
- получены зависимости параметров площади пятна контакта от жѐсткости
рабочих органов и плотности обрабатываемой среды (количества проходов), под-
10
тверждающие возможность регулирования площади пятна контакта в широком
диапазоне;
- получены зависимости распределения напряжений и деформаций по толщине грунтового слоя, определяющие области эффективного использования катков;
- получены зависимости, определяющие эффективную зону проработки уплотняемой среды в зависимости от жѐсткости рабочего органа и частоты приложения внешней силы;
- предложены рекомендуемые значения жѐсткости пневмошинных рабочих
органов для различных этапов уплотнения.
Теоретическая значимость:
- открыто новое направление в области уплотнения грунтов вибрационными
катками с пневмошинными рабочими органами;
- получены теоретические зависимости распределения напряжений и деформаций по толщине грунтового слоя при его уплотнении вибрационными катками
с пневмошинными рабочими органами;
- получены теоретические зависимости, определяющие эффективную зону
проработки уплотняемой среды вибрационными катками, учитывающие параметры катка и жѐсткость рабочих органов.
Практическая значимость:
-разработана линейка перспективных конструкций пневмошинных рабочих
органов вибрационных катков с расширенным диапазоном изменения жѐсткости;
-разработана комплексная методика обоснования параметров вибрационных
катков с пневмошинными рабочими органами;
-разработаны технологические рекомендации по уплотнению грунтов вибрационными катками с пневмошинными рабочими органами.
Методология и методы исследований. Методология исследований предусматривает использование метода системного анализа и статистических методов
исследований. Общая методика исследований основывается на комплексном экспериментально-теоретическом подходе, включающем математическое моделирование и теоретические исследования процесса уплотнения упруговязкопластич-
11
ной грунтовой среды вибрационными катками с пневмошинными рабочими органами. Эмпирические исследования, экспериментальную проверку результатов
теоретических исследований.
Положения, выносимые на защиту:
- математическая модель взаимодействия нескольких последовательно соединѐнных элементарных упруговязкопластичных столбов среды с пневмошинным рабочим органом вибрационного катка;
- зависимости жѐсткости и коэффициента вязкого трения пневмошинных рабочих органов от внутреннего давления и конструктивных параметров шин;
- зависимости параметров площади пятна контакта от жѐсткости рабочих органов и плотности обрабатываемой среды (количества проходов);
- зависимости распределения напряжений и деформаций по толщине грунтового слоя, определяющие области эффективного использования катков;
- зависимости, определяющие эффективную зону проработки уплотняемой
среды в зависимости от жѐсткости рабочего органа и частоты приложения внешней силы;
- рекомендуемые значения жѐсткости пневмошинных рабочих органов для
различных этапов уплотнения;
- конструкции пневмошинных рабочих органов вибрационных катков с расширенным диапазоном изменения жѐсткости;
- методика обоснования параметров вибрационных катков с пневмошинными
рабочими органами;
- технологические рекомендации по уплотнению грунтов вибрационными
катками с пневмошинными рабочими органами.
Степень достоверности результатов исследований. Достоверность теоретических исследований обеспечена использованием общеизвестных положений теории деформирования упруговязких и упруговязкопластичных сред, достаточным
количеством эмпирических исследований и общепринятыми методами обработки
экспериментальных данных. Сравнение теоретических и экспериментальных данных получено в результате проведения многофакторного эксперимента с исполь-
12
зованием экспериментального образца вибрационного катка с пневмошинным рабочим органом.
Апробация работы. Основные положения диссертации доложены, обсуждены
и одобрены: на международной конференции «Современные проблемы транспортного строительства, автомобилизации и высокоинтеллектуальные научнопедагогические технологии» (г. Омск, 13 – 15 ноября 2000 г.); на научнопрактической конференции «Пути повышения качества и эффективности строительства, реконструкции, содержания автомобильных дорог и сооружений на
них» (г. Барнаул, 9 – 23 марта 2002 г.); на семинаре-совещании «Совершенствование технологий проектирования строительства Федеральной автодороги ЧитаХабаровск» (г. Иркутск, 3 – 7 декабря 2001); на международной научнопрактической конференции «Дорожно-транспортный комплекс, экономика, экология, строительство и архитектура» (г. Омск, 21 – 23 мая 2003 г.); на 43-й международной научно-технической конференции ААИ «Проблемы создания и эксплуатации автомобилей, специальных и технологических машин в условиях Сибири и Крайнего севера» (г. Омск, СибАДИ 2003 г.); на Всероссийской научнопрактической конференции студентов, аспирантов и молодых учѐных «Проблемы
функционирования систем транспорта» (г. Тюмень, 11-12 октября 2011 г.); на
Всероссийской научно-технической конференции (с международным участием)
«Ориентированные фундаментальные прикладные исследования – основа модернизации и инновационного развития архитектурно-строительного и дорожнотранспортного комплексов России (г. Омск, 2011 г.); на международной научно
практической конференции, посвященной 200-й годовщине победы России в Отечественной войне 1812 г. ( г. Пермь, 26–28 апреля 2012 г.); на международной 66й научно-практической конференции «Ориентированные фундаментальные и
прикладные исследования – основа модернизации и инновационного развития архитектурно-строительного и дорожно-транспортного комплексов России» (Омск,
2012 г.), на заседаниях кафедры «ЭСМиК» ФГБОУ ВПО «СибАДИ» и др.
Публикации. По материалам диссертации опубликовано более 40 печатных
работ, из них 17 в изданиях, рекомендованных ВАК РФ, 5 свидетельств и патен-
13
тов на изобретения и полезные модели РФ.
Внедрение результатов исследований:
- методика обоснования параметров вибрационного гидрошинного катка и
конструкция вибрационного гидрошинного катка для уплотнения грунтов
ОАО «Раскат» (г. Рыбинск);
- методика определения рациональных параметров и конструкция вибрационного пневмошинного катка в ОАО «Раскат» (г. Рыбинск);
- экспресс-методика определения жѐсткости пневмошинных рабочих органов
катков в ОАО «Сибтрубопроводстрой» (г. Новосибирск);
- методика определения рациональных параметров вибрационных катков в
ООО «Стройтехника» (г. Омск);
- методика обоснования рациональных параметров и технологические рекомендации по уплотнению грунтов вибрационными катками с пневмошинными
рабочими органами в ООО «НПО «Мостовик»» (г. Омск);
- технологические рекомендации по уплотнению грунтов вибрационными
катками с пневмошинными рабочими органами в ООО «Дорожно-Строительные
Технологии» (г. Омск).
Структура и объѐм работы. Диссертационная работа состоит из введения, 6
глав, заключения, списка литературы и приложений. Объѐм диссертации составляет в целом 326 страниц, в том числе 62 таблицы, 152 рисунка и 6 приложений.
14
1. СОСТОЯНИЕ ВОПРОСА В ОБЛАСТИ УПЛОТНЕНИЯ ГРУНТОВ
1.1. Анализ процессов уплотнения грунтов различными способами
Необходимость исследования напряжѐнно-деформированного состояния различных сред при их уплотнении является важной и актуальной задачей для многих областей науки. Изучение закономерностей
изменения напряжѐнно-
деформируемого состояния среды, при внешнем силовом воздействии, позволит
определять правильные значения параметров взаимодействия среды и уплотняющего средства для достижения необходимых показателей плотности и прочности,
которые принято оценивать коэффициентом уплотнения ку с минимальными затратами энергии и времени.
Основная задача исследований по уплотнению дорожно-строительных материалов, и в частности грунтов земляных насыпей, заключается в обосновании оптимальных методов и режимов обработки уплотняемых сред для достижения требуемого коэффициента уплотнения.
Многообразие типов грунтов и их свойств требует использования различных
рабочих органов уплотняющих средств, оптимизации параметров и режимов уплотнения. Появились различные способы уплотнения, эффективность каждого из
которых непосредственно зависит от свойств и состояния уплотняемого грунта.
Сложность и многообразие механических свойств контактирующих тел (рабочего
органа уплотнителя, с одной стороны, и деформируемого грунта, с другой) привели к появлению разнообразных конструкций уплотняющих машин, процесс взаимодействия которых с уплотняемой средой протекает с разной степенью интенсивности.
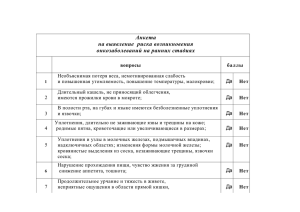
По силовому воздействию на среду различают следующие способы: статический (укатка), вибрационный (динамический), трамбование и комбинированный,
сочетающий различные способы. Классифицируются уплотняющие машины по
разным признакам с точки зрения перспектив их развития, в качестве примера
15
можно привести классификацию (рисунок 1.1), разработанную В. Б. Пермяковым,
А. В. Захаренко и др. [88].
Уплотняющие машины
1.1 Непрерывный
Уплотняющие средства всех типов с
бортовыми или автономными средствами
контроля (катки, виброплиты,
трамбующие машины ,
асфальтоукладчики )
1. Контроль
характеристик
материала в процессе
уплотнения
1.2 Эпизодический
2.1 Саморегулирование от
прохода к проходу
2.2 Саморегулирование за один
проход на протяжении контакта
рабочего органа с материалом
2. Регулирование
уплотняющих
давлений
2.3 Принудительное
ступенчатое от прохода к
проходу
Каток с прерывистой рабочей
поверхностью , с бочкообразным вальцом
ОАО«Раскат»
Каток однопроходного уплотнения
Лѐгкие, средние , тяжѐлые статические и
вибрационные катки , виброплиты,
трамбующие машины
2.4 Принудительное
непрерывное от прохода к
проходу
3. Увеличение
времени
взаимодействия
(контакта) с
уплотняемым
материалом
3.1 Применение
недеформирующегося рабочего
органа значительной
протяжѐнности
Каток с пневмовакуумным балластным
устройством , пневмошинный каток с
широким интервалом регу лирования
давления в шинах (на авиационных
шинах)
Вибро- и выглаживающие плиты
3.2 Применение
деформирующегося рабочего
органа
Пневмошинные катки, гидрошинный
вибрационный каток ОАО «Раскат»
4.1 Управление режимами
оптимальных температур и
влажности
Уплотняющие средства всех типов
4. Минимизация
сопротивления
деформированию
уплотняемых
материалов
4.2 Вибрационное воздействие
Вибрационные плиты , катки,
гидрошинный вибрационный каток
4.3 Учѐт анизотропных свойств
уплотняемых материалов
4.4 Учѐт реологических свойств
уплотняемых материалов
Материалоукладчик с наклонно
расположенным трамбующим брусом ,
самоходные вибропли ты, катки с
направленной вибрацией и перекосом
вальцов
Уплотняющие машины импульсного
действия
5. Дополнительное
касательное силовое
воздействие на
уплотняемый материал
5.1 С использованием
статического касате льного усилия
Каток с прерывистой рабочей
поверхностью
5.2 С использованием
импульсного касательного усилия
Катки осциллирующие , нутирующие
Dynapac, НАММ
Рисунок 1.1 – Классификация уплотняющих машин
16
Рабочие органы уплотняющих машин выполняются в виде: плиты плоского и
криволинейного профиля; гладких, кулачковых, ребристых, пластинчатых, решѐтчатых вальцов; пневматических колѐс. Уплотнение материала различными совмещѐнными способами называют комбинированным.
Создание в уплотняемой среде напряжѐнно-деформируемого состояния (далее НДС), приводящего к необратимой деформации, определяется контактными
напряжениями, скоростью приложения внешней силы, структурой, состоянием
самого материала и т.д. Для каждого материала необходимо использовать наиболее эффективные параметры процесса уплотнения, которые определяют способ
укатки. Практически все способы уплотнения обеспечиваются с помощью рабочих органов катков: статический, вибрационный, трамбующий.
1.1.1. Анализ процесса статического уплотнения
Статическим уплотнением считается укатка материалов катками на относительно небольших скоростях движения 3-5 км/ч. Напряжения в обрабатываемом
материале возникают в результате действия силы тяжести от рабочих органов
машины. Уплотняющее действие катков зависит от максимальных контактных
напряжений, распределения напряжений по площади контакта, размеров поверхности контакта, скорости укатки и числа проходов. Основное влияние на прочность материала оказывают значения контактных напряжений. По мере движения
катка в каждой точке контакта возникает напряжѐнно-деформируемое состояние
(НДС), вследствие чего происходят перегруппировка и упаковка частиц обрабатываемой среды [143, 147].
Гладковальцовые катки. В настоящее время гладковальцовые катки (рисунки 1.2, 1.3) в большей степени используются при уплотнении асфальтобетонных
покрытий и в меньшей степени – для уплотнения грунтов.
17
Рисунок 1.2 – Статический гладковальцовый каток
h0 – толщина уплотняемого слоя; ∆x – необратимая (пластическая)
деформация; ∆xу – обратимая (упругая) деформация;
ζмах – максимальные контактные напряжения грунта
Рисунок 1.3 – Схема взаимодействия гладкого вальца
с грунтом и эпюра напряжений в грунте
18
Эффект уплотнения зависит от параметров катка: размеров рабочих органов,
веса, линейного давления на грунт и режима уплотнения (числа проходов, скорости движения катка). Напряжения в грунте (рисунок 1.3), согласно исследованиям
профессора Н. Я. Хархуты [143, 147], можно выразить следующей зависимостью:
мax q л
Eу
qл
;
(1.1)
Fст
,
L
(1.2)
R
где qл – линейное среднее удельное давление на грунт; Eу – модуль упругости
грунта; R –радиус вальца катка; Fст – сила тяжести вальца; L – ширина вальца.
Гладковальцовые статические катки всѐ меньше и меньше используются в
строительстве. Основная причина заключается в том, что они обладают невысокой производительностью и для достижения нормативной плотности, согласно
СНиПу [128], необходимо применять как минимум два типоразмера таких катков
(средние, тяжѐлые). Статические катки не могут создать необходимые напряжения для уплотнения материала в диапазоне от свежеосыпанного состояния до значений нормативной плотности. В начале укатки прочность материала невысока, и
контактные напряжения не должны превышать предел его прочности. Необходимо использовать более лѐгкие катки. По мере того, как в процессе уплотнения
прочность материала повышается, каток перестаѐт создавать соответствующее
напряжения, и возникает необходимость применять более тяжѐлые модели катков. Это увеличивает энергоѐмкость строительства, усложняет состав специализированного комплекта машин (СКМ) и, в конечном итоге, применение только
статических катков значительно снижает эффективность технологического процесса и увеличивает себестоимость работ [128, 147].
Основное преимущество таких катков – простота конструкции.
Пневмошинные катки. При статическом уплотнении достаточно эффективными являются катки на пневматических шинах (рисунок 1.4). Преимущество их
в том, что они обладают возможностью регулировки контактных напряжений. Это
достигается изменением давления внутри пневматических шин, при этом изменя-
19
ется площадь пятна контакта, а значит и контактные напряжения. Ещѐ одним преимуществом пневматических шин является большая площадь пятна контакта, по
сравнению с металлическими вальцами, что позволяет при одной и той же скорости движения увеличивать время контакта. Увеличивается время материала в
НДС, что положительно сказывается на накоплении необратимых деформаций,
т. е. на интенсивности процесса уплотнения, увеличивается толщина уплотняемого слоя, уменьшается количество проходов катка по одному следу [5, 147].
Рисунок 1.4 – Статические катки на пневматических шинах
Эффект уплотнения зависит от величины контактных напряжений, приложенных уплотнителем к поверхности слоя, и времени их действия [5, 8, 15, 16, 23,
29, 63, 68, 72, 133, 137, 144, 158].
Контактные напряжения могут быть вычислены по формулам контактной
теории упругости [24, 97, 135] либо по эмпирическим формулам. Отметим, что
авторами изучались не только максимальные контактные напряжения, но также и
закономерности их распределения по площади отпечатка [16, 17, 24, 34, 35, 45,
84], так как от характера распределения зависит процесс уплотнения материалов.
Согласно исследованиям О. Т. Батракова, Н. А. Ульянова и др. [15, 16, 137, 158]
было установлено, что, с увеличением давления воздуха в пневматической шине
до рwмax, эпюра контактных напряжений близка к эллиптической (рисунок 1.5) и
имеет максимум в центре площадки нагружения и максимумы на краях отпечатка,
20
т.е. давление в шинах непосредственно влияет на распределение напряжений в
уплотняемом грунте.
h0 – толщина уплотняемого слоя; ∆x – необратимая (пластическая) деформация;
∆xу – обратимая (упругая) деформация; ζмах – максимальные контактные
напряжения в грунте
Рисунок 1.5 – Схема взаимодействия пневмошинного
вальца с грунтом и эпюра напряжений в грунте
Для полноценной оценки НДС среды при уплотнении пневмокатками необходимо знать не только свойства среды, но и свойства шин. Свойства пневматических шин изучались рядом авторов, из которых следует отметить: В. А. Анфимова
[5], А. К. Бирулю [30 35], В. Ф. Бабкова [6 –9], О. Т. Батракова [15 – 23],
В. А. Бидермана [29], В. И. Кнороза [64], В. И. Гребенщикова [45, 46], А. А. Ма-
21
лышева [75], В. Н. Тарасова [132, 134], Н. А. Ульянова [137], Р. Хедекеля [155] и
др.
Экспериментальные исследования ряда авторов показали, что радиальная
деформация шины растѐт несколько медленнее нагрузки и закон деформирования
может быть представлен в виде [46]
Fст c х ро ,
(1.3)
где Fст – сила тяжести; Δхро – радиальная деформация шины; с – жѐсткость шины;
– постоянная характеристика для данного типа пневматической шины.
Для определения радиальной деформации пневматической шины часто используется формула Р. Хедекеля [155]:
х ро
Fст
,
pw 2 R R пр
(1.4)
где рw – давление воздуха в шине; R – наружный радиус колеса (шины); Rпр – радиус протектора.
Радиальная деформация пневматической шины существенно зависит от жѐсткости опорной поверхности, однако в настоящее время формул, учитывающих
это обстоятельство, не имеется, за исключением приближѐнной зависимости,
предложенной А. К. Бирулей и О. Т. Батраковым [33].
При уменьшении давления воздуха радиальная деформация пневматической
шины возрастает [47, 64, 46, 75, 155]. Площадь отпечатка пневматической шины
при сжатии на жѐсткой поверхности растѐт с увеличением нагрузки и имеет форму, близкую к овалу или эллипсу [8, 68, 83, 131, 132]. Так как уплотняющие машины передвигаются по поверхности различной жѐсткости, то при описании
взаимодействия пневматических колѐс с уплотняемым слоем необходимо более
полно учитывать механические свойства этого слоя. В рыхлом слое грунта силы
трения и сцепления между частицами материала малы, и поэтому слой оказывает
малое сопротивление деформированию. В этом случае площадь контакта велика,
а значения напряжений малы. При последующих проходах слой уплотняется, что
ведѐт к увеличению его сопротивления деформированию, уменьшению площади
контакта и увеличению напряжений, т.е. у пневмошинных катков проявляется
22
способность адаптироваться по контактным напряжениям.
В работе В. Н. Тарасова [132] выполнено отсечение пятна контакта от оболочки шины (рисунок 1.6), рассмотрена физическая сущность взаимодействия
пневматической шины с опорной поверхностью. В поверхности сечения для
плоского контакта на рисунке 1.6,б показаны силы реакции в виде распределенных удельных сил и (напряжений). Нормальные распределенные удельные
силы ζ в поверхности сечения по периметру контакта и распределенные моменты
Мi оказываются взаимно уравновешенными и не имеют равнодействующей [132].
Для гладкой шины без протектора средние контактные напряжения ζ являются
практически равномерно распределѐнными по площади пятна контакта. Для шины, имеющей протектор, площадью пятна контакта является площадь фигуры, ограниченной огибающей по внешнему периметру контакта. Из условия равновесия
отсечѐнного контакта получено следующее уравнение [132]:
S Fст р wS 0,
(1.5)
где S – площадь пятна контакта шины с опорной поверхностью; – средние напряжения в контакте; pw – давление воздуха в шине; Fст – сила тяжести колеса;
μ – относительный коэффициент нагрузки, воспринимаемый каркасом шины.
Рисунок 1.6 – Расчетная схема шины на опорной поверхности
(по В. Н. Тарасову)
23
Равнодействующая от вертикальных сил каркаса шины Fст является долей
от силы тяжести колеса Fст, где – коэффициент, определяющий долю вертикальных сил, воспринимаемых каркасом от общей силы тяжести на колесо [132].
Из уравнения (1.5) записывается выражение:
p wS S p w
1,
S
(1.6)
где рwS – грузоподъѐмность шины.
Сила тяжести колеса Fст равна нормальной силе реакции N в пятне контакта:
Fст Nр S .
(1.7)
Из уравнения (1.6) установлено, о если pw>ζ, коэффициент μ имеет положительный знак, т. е. между контактом шины и оболочкой в каркасе возникает вертикальная растягивающая сила, равная μ Fст [132].
Вопрос о распределении напряжений по глубине уплотняемого суглинистого
грунта от пневматических шин, при оптимальной влажности, проиллюстрирован
на рисунках 1.6. – 1.15. [5, 16, 131, 144, 158].
Катки имеют несколько колес на одной оси, которые могут располагаться в
шахматном, рядном или комбинированном порядке. Из работ по теории упругости [97, 135] известно, если к поверхности массива приложено несколько сил, то
сжимающие напряжения в любой точке указанного массива определяются путем
суммирования напряжений, возникающих от силы более простого вида, следовательно, необходимо суммировать напряжения от каждого колеса для получения
истинной картины распределения напряжений под колесами пневмошинного катка.
Исследования, проведѐнные П. Л. Сурье [131], представлены в диаграммах
(рисунки 1.8 – 1.16) через e обозначено расстояние между штампами (колесами), а
через а – диаметр круга, равновеликого площади пятна контакта шины с грунтом.
Не трудно заметить, что в данном случае мы условно увеличиваем ширину полосы уплотнения, т.е. сравниваем ширину беговой дорожки колеса с диаметром
равновеликого круга a при пропорциональном увеличении расстояний между ко-
24
лесами e [131].
Из диаграмм (рисунки 1.7 – 1.11) видно, что линии напряжений при нескольких колесах охватывают большую активную зону, чем при одном колесе. На основе диаграмм суммарных напряжений П. Л. Сурье [131] были предложены графики распределения средних глубин напряжений в зависимости от схемы расположения колес и расстояний между ними на одной оси.
Однако данные диаграммы «относятся только к каткам, оборудованным шинами общего назначения, а при использовании специальных шин надо дополнительно учесть дополнительный поправочный коэффициент» [131].
Исследования авторов Л. А. Антипова, В. Ф. Бабкова, Д. С. Баранова, Н. Н.
Иванова, Г. И. Покровского, Г. Пресса, В. Н. Тарасова, Н. А. Ульянова, И. С. Федорова, Н. А. Цытовича и др. [8, 15, 60, 89, 90, 132, 137, 148] выявили, что вертикальные нормальные напряжения в уплотненном грунтовом массиве, как по характеру, так и по абсолютной величине близки к напряжениям, определенным по
формулам теории упругости [131]. Это происходит потому, что грунт в конце
укатки набирает высокую прочность, перестаѐт пластически деформироваться, и
при дальнейшем приложении уплотняющей силы проявляются только упругие
деформации.
Анализ распределения НДС в уплотняемом грунте (рисунки 1.7. – 1.16.) позволяет сделать вывод, что наиболее интенсивно процесс уплотнения будет проходить при шахматной схеме расположения колѐс и параметре е=(0,8-0,9)а.
25
Рисунок 1.7 – Диаграмма напряжений грунта
под одним колесом (статическая нагрузка) [131]
Рисунок 1.8 – Диаграмма напряжений грунта
под колесами катка при e = 0,1а (рядная схема) [131]
26
Рисунок 1.9 – Диаграмма напряжений грунта
под колесами катка при e = 0,2а (рядная схема) [131]
Рисунок 1.10 – Диаграмма напряжений грунта под колесами
катка при e = 0,3а (рядная схема) [131]
Рисунок 1.11 – Диаграмма напряжений грунта под колесами
катка при e = 0,4а (рядная схема) [131]
27
Рисунок 1.12 – Диаграмма напряжений грунта под колесами катка
при e = 0,1а (шахматная схема) [131]
Рисунок 1.13 – Диаграмма напряжений грунта под колесами
катка при e = 0,9а (шахматная схема) [131]
Рисунок 1.14 – Диаграмма напряжений грунта под колесами
катка при e = 0,8а (шахматная схема) [131]
28
Рисунок 1.15 – Диаграмма напряжений грунта под колесами
катка при e = 0,7а (шахматная схема) [131]
Рисунок 1.16 – Диаграмма напряжений грунта под колесами
катка при e = 0,6а (шахматная схема) [131]
Анализ диаграмм (рисунки 1.7 – 1.16) позволил сделать вывод, что для создания необходимого НДС в грунте, уплотняемом катками на пневматических шинах, необходимо не только правильно выбирать вес катка, типоразмер пневмошин
и внутреннее давление в них, но и правильно осуществлять расстановку шин на
вальцах. Это напрямую влияет на производительность пневмошинных катков и их
способность прорабатывать слои большой толщины по сравнению с гладковальцовыми статическими катками.
Кулачковые катки. Рабочим органом таких катков (рисунок 1.17) служит
валец, оснащѐнный кулачками (типа «шипфуд» – острые или «пэдфуд» – с увели-
29
ченной опорной поверхностью), уплотнение происходит за счет повышенных
значений напряжений грунта под кулачками. Изменение максимальных контактных напряжений грунта описывается зависимостью [147, 153]
мax
Fст
;
s л / 2
(1.8)
h 0 0,65(h k 0,25b k h1 ) ,
(1.9)
где Fст – сила тяжести вальца; s – площадь опорной поверхности кулачка; л – количество кулачков в ряду; hk – высота кулачка, см; bk – толщина кулачка, см; h1 –
толщина верхнего разрыхленного слоя после прохода кулачком.
Рекомендуемые проф. Н. Я. Хархутой [ζмах]:
0,5-0,7 МПа – для песков и супесей;
0,7-1,5 МПа – для легких суглинков;
1,5-4,0 МПа – для средних суглинков;
3,0-6,0 МПа – для тяжелых суглинков и глин.
При уплотнении грунтов кулачковыми катками различают три зоны уплотнения по глубине: h1 – зона разрыхления при заглублении кулачка; h2 – зона, где
грунт уплотняется за счет сдвига в боковую поверхность при заглублении кулачка; h3 – зона ниже опорной поверхности кулачка, где грунт уплотняется вертикальной нагрузкой.
h1
bк
h2
hк
h0
h3
Рисунок 1.17 – Кулачковый каток и схема уплотнения грунта кулачком
30
Следует отметить, что в настоящее время наиболее эффективными себя показали кулачковые катки типа «пэдфут», особенно на связных грунтах, где требуются повышенные напряжения [153]. Данные катки обладают возможностью частично адаптироваться по контактным давлениям под изменяющуюся плотность
грунта в процессе укатки, за счѐт изменения глубины погружения кулачка, т.е.
изменения площади контакта рабочего органа с материалом. Нагрузка на один кулачок должна быть разрушающей для данного вида грунта, но не такой, чтобы
кулачок вдавливался на всю высоту. Всѐ это снижает диапазон контактных напряжений кулачковых катков, а значит и их возможности к адаптации. При этом
эффективность их применения на несвязанных и слабонесущих грунтах значительно падает. Данные катки не всегда обеспечивают необходимую ровность поверхности и, как правило, используются в комплектах совместно с гладковальцовыми катками других типов [132, 147, 153].
1.1.2. Анализ процесса вибрационного уплотнения
Одним из способов повышения интенсивности процесса уплотнения является
использование вибрации [63, 67, 153, 163], особенно ярко это проявляется у несвязанных материалов. При вибрировании в них резко уменьшаются условные коэффициенты вынужденного трения, уменьшается внутреннее сопротивление трению (сухой мелкозернистый песок имеет коэффициент внутреннего трения до
вибрации – 0,5, во время вибрации – 0,07, а после вибрации – 0,85), снижается сопротивление деформированию, процесс уплотнения протекает более интенсивно
[63, 147]. Поэтому в настоящее время при уплотнении грунтов всѐ больше и
больше применяется вибрационная уплотняющая техника (рисунок 1.18), которая,
как показывает практический опыт, является более эффективной и производительной, чем статические катки [63, 132].
31
Рисунок 1.18 – Самоходный вибрационный каток
Машины для вибрационного уплотнения делятся на вибрационные плиты и
катки. Катки получили гораздо большее распространение для уплотнения грунтов, укреплѐнных грунтов, щебѐночных оснований, жѐстких бетонных смесей и
асфальтобетонных смесей, вследствие большей универсальности и многотипности рабочих органов, а плиты в основном применяются при уплотнении цементобетонных смесей [63, 65, 66, 67, 163].
Преимуществом использования вибрационных катков с металлическими
вальцами является возможность добиваться того же коэффициента уплотнения
(ку), как и статическими катками; при этом вес виброкатка может быть снижен в 3
раза [63, 66, 67]. Снижается потребляемая мощность, используются менее мощные, а потому более дешѐвые тягачи. Получаемый от применения виброкатков
эффект, согласно исследованиям Я. А. Калужского, О. Т. Батракова [63], можно
оценить коэффициентом эффективности кэ, который представляет собой отношение
32
кэ
qл
,
qв
(1.10)
где qл – линейное давление обычного гладковальцового катка, которое необходимо для доведения грунта до необходимой плотности в слое оптимальной толщины; qв – линейное давление того же катка, определяемое при тех же условиях, но
при наличии колебаний вальца.
Вибрационные катки, как прицепные, так и самоходные, могут работать в
ударном режиме. Анализируя уплотняющую способность виброкатков, зависящую от относительной величины возмущающей силы (рисунок 1.19.), авторы [63,
147] делают выводы, что на участке (ОА) характер колебаний близок к гармоническому режиму, ударное действие отсутствует, и рост плотности является следствием увеличения амплитуд колебаний. Максимальная эффективность уплотнения при этом достигается в точке А. На участке (АВ) гармонический характер колебаний нарушается, колебания становятся ударными, но амплитуды для такого
режима невелики, потери на ударный режим не компенсируются, поэтому уплотняющая способность снижается. Если и дальше увеличивать соотношение F0/Fст и
амплитуды, то вибротрамбование становится более интенсивным (ВС), благодаря
этому значительно повышаются контактные напряжения, наблюдается рост уплотняющего эффекта [63, 147].
Для уплотнения несвязанных грунтов наиболее выгоден режим, соответствующий участку (ОА). Для уплотнения малосвязанных и связанных грунтов требуются значительные контактные напряжения, и значения F0/Fст должны быть
выше, чем в точках А и В [63, 147].
Максимальные значения контактных напряжений в грунте для виброкатков
выражаются зависимостью [147]:
мax 0,5
qвE
,
R
(1.11)
где R – радиус вальца; Е – модуль деформации грунта; qв – линейное давление,
которое должно быть определено с учѐтом возмущающей силы.
33
Линейное давление [147]
q в к пр
F0 Fcт
,
L
(1.12)
где F0 – амплитудное значение возмущающей силы; Fст – сила тяжести вальца; L –
ширина вальца; кпр – коэффициент превышения, кпр=3 – 5 (рисунок 1.20).
C
A
B
O
F0/Fст
Рисунок 1.19 – Зависимость плотности грунта от отношения вынуждающей
силы к весу рабочего органа (по Н. Я. Хархуте, Я. А. Калужскому [63, 147])
Исследования [14, 60, 147] показали, что переход к ударным колебаниям у
вибрационных катков происходит при несколько большем отношении возмущающей силы к весу, чем в случае вибрационных площадок. Уплотнение несвязных грунтов более эффективно в том случае, когда каток совершает квазигармонические колебания большой амплитуды, соответствующие точке А (рисунок
1.19.). При таком режиме на уплотнение единицы объѐма грунта расходуется минимальная работа. Этот режим при частотах 25 – 100 Гц достигается, когда
F02Fcт. Уплотнение связных грунтов в большей степени должно производиться
34
при ударных колебаниях катка, поэтому при выборе относительной величины
возмущающей силы возможно руководствоваться неравенством F0(3,5–4,0) Fcт
[63, 147].
кпр
6
4
2
2
4
6
8
10
12
F0/Fcт
Рисунок 1.20 – Зависимость коэффициента превышения кпр действительных
контактных напряжений, от рассчитанных по формуле (1.17)
Осцилляторное уплотнение. Отдельно стоит отметить осцилляторные катки, которые в определѐнной степени являются ответвлением вибрационного способа уплотнения. При осцилляторном способе уплотнения валец совершает возратно-поступательные (крутильные) колебания вокруг своей оси (рисунок 1.21.),
при этом угол поворота вальца «вперѐд» немного больше, чем «назад» для обеспечения поступательного движения катка. Вибровозбудитель представляет вращающиеся в одном направлении грузы, которые создают момент силы относительно оси вальца, вызывающий осциллирующие перемещения вальца по горизонтали. Появляющиеся при этом силы сдвига, направленные вперед и назад, передаются в слой, и материал испытывает напряжения не только от нормальных
сил тяжести машины, но и сдвиговые напряжения в горизонтальной плоскости.
Таким образом, создаѐтся необходимое НДС среды для еѐ уплотнения. Колебательные нагрузки в этом случае примерно в 10 раз меньше по сравнению с такими
же силами при «классической» вибрации. Кроме того, валец остается в постоянном контакте с поверхностью. Непрерывная нагрузка в результате такого контакта также способствует быстрому и равномерному уплотнению [66].
35
В целом этот способ достаточно эффективен и безопасен для слоѐв небольшой толщины, благодаря меньшим колебаниям как материала, так и машины.
Возникающие при этом напряжения, как правило, позволяют получить очень хороший уплотняющий эффект.
Рисунок 1.21 – Схема работы осцилляторного рабочего органа катка
Тем не менее, данный способ из-за уменьшенных напряжений в вертикальной плоскости эффективен только на тонких слоях, и вслед за осцилляторным
катком должен использоваться тяжелый статический каток с надлежащим контактным давлением вальца, чтобы в конечном итоге получить высокие значения
напряжений и, как следствие требуемое качество обрабатываемой грунтовой среды [66, 67].
Для вибрационных дорожных катков используют гладкие, ребристые, кулачковые (типов «пэдфут» и «шипфут») вибрационные вальцы. Известны попытки
использования вибрационных катков на пневмошинах, но в силу демпфирующих
свойств шин они не получили широкого распространения [28, 51, 52].
Несмотря на то, что вибрационные катки являются наиболее эффективным
средством для уплотнения несвязных и малосвязанных материалов, они способны
прорабатывать слои большой толщины и обладают высокой производительностью и меньшей металлоѐмкостью, их применение зачастую экономически не оправдано на связных грунтах, т.к. для этих грунтов требуются значительное время
приложения нагрузки. Для этого необходимо увеличивать время нахождения материала в напряжѐнном состоянии. Данный эффект достигается либо снижением
скорости движения катка, что приводит к снижению производительности, либо
36
увеличением площади контакта, что невозможно в силу конструктивных особенностей рабочих органов виброкатков. Поэтому вибрационные катки также часто
работают совместно с катками других типоразмеров по массе. Способность адаптироваться под меняющиеся в процессе уплотнения свойства грунта, в основном
сводится к регулированию параметров вибрации (частоты колебаний, величины
вынуждающей силы), причѐм эти регулировки чаще всего производятся дискретно. Кроме того, отсутствует возможность изменения контактных напряжений в
диапазоне, необходимом для полного цикла уплотнения материала.
1.1.3. Анализ процесса трамбования
Трамбование является динамическим способом уплотнения различных материалов. Трамбующие машины способны уплотнять грунты слоями больших толщин. Они пригодны для уплотнения и связных, и несвязных грунтов. Для реализации данного способа применяют падающие плиты на экскаваторах, трамбующие машины. В некоторых случаях используется режим вибротрамбования катками, описанный выше в анализе процесса вибрационного уплотнения.
Трамбование основано на последовательных ударах плиты по материалу (рисунок 1.22). Физическая сущность процесса отвечает теории удара [51]. Уплотнение происходит за счѐт кинетической энергии падающего груза, которая расходуется на необратимые перемещения частиц материала и выжимание плѐнок жидкой фазы из зон контактов между минеральными частицами, а также упругое сжатие материала.
37
Н–высота сбрасываемого груза; h0–толщина уплотняемого слоя; Δxу – обратимая
(упругая) деформация; ζ – контактные напряжения; η0 – период действия импульса;
Fст – сила тяжести трамбовки
Рисунок 1.22 – Схема уплотнения грунта трамбовкой
Изменение напряжѐнно-деформируемого состояния в уплотняемом грунте
(рисунок 1.23) достаточно подробно исследовал Н. Я. Хархута [147]. Суть процесса заключается в том, что после удара в грунте начинает распространяться волна
напряжений. Деформации при этом развиваются через некоторый промежуток
времени после удара в точке 2, по мере распространения волны объѐм деформируемого грунта возрастает, следовательно, возрастает величина деформации (участок 2–3). Напряжения на поверхности в этот период также возрастают, но не так
интенсивно, т. к. по мере накопления деформаций возрастает структурное и вязкое сопротивление грунта деформированию. Напряжения на поверхности контакта достигают максимума в точке 3. В течение некоторого времени деформации
продолжают возрастать, но с гораздо меньшей интенсивностью, и максимум деформаций наблюдается в точке 4. После максимума напряжений этот эффект обусловлен влиянием вязких и инерционных сил. Удар заканчивается в точке 4, после
этого начинается восстановление упругих, упруговязкопластичных деформаций
материала (участок 5–6). Для эффективного уплотнения материала необходимо
38
стремиться к увеличению значений НДС на участках 2–3 и 3–4 и к уменьшению
значений на участках 4–5 и 5–6.
напряжение
3
4
2
1
6
деформация
5
Δx
Рисунок 1.23 – Зависимость между напряжениями и деформацией
(по Н. Я. Хархуте)
Основными факторами, влияющими на НДС среды при трамбовании, являются: максимальные значения контактных напряжений, импульс силы, время удара, скорость падающего груза.
F H
max ст
; h 0 (J пред ) ;
S
J
Fст 2Hg
,
gS
(1.13)
(1.14)
где S – площадь трамбовки, м2; J – удельный импульс, Н·с/м2; Н – высота подъѐма
трамбовки, м; g – ускорение свободного падения, м/с2.
Удельный импульс является основной характеристикой процесса трамбования. Экспериментальные исследования показали [143, 147], что уплотнение грун-
39
та при трамбовании прямо пропорционально величине удельного импульса. Для
обеспечения требуемого уплотнения величина удельных импульсов должна быть
больше предельных значений Jпред, величина которых зависит от вида грунта.
Опытами проф. Н. Я. Хархуты установлены предельные импульсы Jпред для
различных грунтов, зная которые возможно определить необходимые параметры
процесса уплотнения.
Jпред =(40-60)10-6 Н·с/м2 – для легких грунтов,
Jпред = (175-225)10-6 Н·с/м2 – для связных тяжелых грунтов.
Оптимальная толщина слоя h0 возрастает с возрастанием Jпред.
Например:
при Jпред = 20·10-6 Н·с/м2, h0 =0,3м;
при Jпред = 180·10-6 Н·с/м2, h0 =1,35м.
Процесс трамбования характеризуется малой продолжительностью воздействия напряжений по сравнению со статическими и даже вибрационными катками,
и значительной глубиной распространения напряжѐнно-деформированного состояния. Трамбующие машины прорабатывают слои толщиной до 1 м и более,
адаптация таких уплотняющих машин возможна за счѐт изменения высоты подъѐма трамбовки, но это приводит к снижению и без того невысоких значений производительности.
1.1.4. Анализ процесса комбинированного уплотнения
Уплотнение данным способом осуществляется комбинацией различных способов: таких как «укатка – вибрация», «вибрация – трамбование» и т. д., применяются специальные машины, в частности, комбинированные катки. Комбинированными катками, согласно ГОСТ 21994 – 76, являются катки с рабочими органами различных видов. Существуют различные комбинации рабочих органов, например, кулачковый вибрационный валец и пневмошины; гладкий вибровалец и
пневмошины; несколько пневмошин на двух осях и статический или вибрационный на третьей оси; сдвоенные вибровальцы и пневмошины.
40
Процессы уплотнения, протекающие при работе таких катков, соответствуют
процессам взаимодействия между уплотняемым материалом и каждым рабочим
органом, но при этом используются не несколько различных катков, а один.
Самая распространѐнная комбинация для данных машин – это сочетание
вибрационного и пневмошинного вальцов (рисунок 1.24). Такая схема наиболее
выгодно показала себя при производстве уплотняющих работ. Пневматические
шины обладают большим временем воздействия на уплотняемый материал и способны регулировать контактные напряжения от прохода к проходу, а также обеспечивают эффективное уплотнение материалов с вязкими свойствами. В то же
время вибрационный валец действует на глубину, превышающую действие пневмошин, и наиболее эффективно обрабатывает несвязанные или малосвязанные
материалы.
Рисунок 1.24 – Каток комбинированного действия
Опыт эксплуатации таких катков показал, что они являются эффективными и
универсальными уплотняющими машинами [65]. Тем не менее, данные машины
41
представляют собой лишь совмещение различных агрегатов (вальцов), реализующих тот или иной способ уплотнения в одной машине. Поэтому их способность
адаптироваться по значениям контактных напряжений ограничена теми же факторами, что и для каждого рабочего органа, отдельно реализующего любой из вышеописанных способов уплотнения.
1.2. Выводы по главе
Выполнен обзор исследований, посвящѐнных возникновению и развитию напряженно-деформированного состояния грунтов при их уплотнении различными
способами. Анализ состояния исследований в данной области показал, что деформирование грунтов является сложным физическим процессом, зависящим от
многих факторов, как со стороны грунтового массива, так и со стороны уплотняющего средства.
Наиболее распространѐнными уплотняющими машинами до сих пор являются
статические гладковальцовые катки. Их основное преимущество это простота
конструкции. Недостаток – такие катки не способны адаптироваться по контактным напряжениям в процессе уплотнения и требуют применения других типоразмеров (по массе) катков, обладают невысокой производительностью.
Несколько более эффективными являются кулачковые статические катки, которые эффективно прорабатывают «тяжѐлые» глинистые грунты, способны частично адаптировать контактные напряжения за счѐт изменяемой, в процессе уплотнения, глубины погружения кулачков. Несмотря на это, диапазон контактных
напряжений у них недостаточен для уплотнения грунтов от свежеотсыпанного состояния до нормативной плотности одним катком, поэтому кулачковые катки
также используются совместно с катками других типоразмеров. Ещѐ одним недостатком кулачковых катков является недостаточная , в некоторых случаях, ровность уплотнѐнной поверхности насыпи.
Наиболее эффективными из статических катков, являются катки на пневматических шинах. Эти машины способны достаточно широко адаптироваться
42
по контактным напряжениям за счѐт саморегулирования площади пятна контакта при деформации шин. Существенное расширение диапазона контактных
напряжений достигается изменением давления воздуха в шинах. Однако данные катки обладают значительными габаритно-массовыми характеристиками,
а их производительность несколько ниже, чем у вибрационных катков.
Наиболее высокопроизводительными катками являются вибрационные
катки. За счѐт применения вибрации они обладают высоким уплотняющим
эффектом при меньших, по сравнению с пневмокатками, габаритно-массовых
характеристиках. Основным недостатком вибрационных катков является незначительный диапазон адаптации контактных напряжений, поэтому виброкатки также используются совместно с катками других типоразмеров.
Катки комбинированного действия совмещают в себе достоинства разных
способов уплотнения, т. к. в них применяется несколько различных рабочих
органов. Они обладают высокой производительностью, могут использовать
вибрацию и достаточно широко регулировать контактные напряжения при наличии пневматических шин, но и здесь диапазон напряжений недостаточен
для того, чтобы уплотнять грунты от свежеотсыпанного состояния до нормативной плотности одним катком.
Научная гипотеза: повышение производительности вибрационных катков достигается за счѐт расширения диапазона адаптации контактных напряжений путѐм
авторегулирования площади пятна контакта при деформировании рабочего органа
в процессе уплотнения грунтов. Расширение диапазона адаптации контактных напряжений достигается путѐм регулирования жѐсткости рабочих органов в диапазоне, обеспечивающем требуемые контактные напряжения и минимальные диссипативные потери вибрационной энергии.
Идея работы: регулирование жѐсткости пневмошинных рабочих органов вибрационных катков в диапазоне значений, обеспечивающем интенсивное протекание процесса уплотнения грунтов от начальной до требуемой плотности одним
катком. Создание вибрационных пневмошинных катков, способных обеспечить
43
повышение производительности и снижение энергоѐмкости производства работ
при уплотнении грунтов.
Общая структура работы представлена на рисунке 1.25.
Актуальность
ВХОД
Анализ состояния вопроса
.
Постановка проблемы
Предмет
исследования
Объект
исследования
Цель
Задачи исследования
Математическое моделирование процесса уплотнения упруговязкопластичной среды
вибрационными катками с пневмошинными рабочими органами
Анализ влияния жѐсткости РО на
величину виброускорений в
деформируемой среде
Экспериментальные исследования пневмошинных РО
1. Определение зависимости реологических свойств РО (с1, b1)
от внутреннего давления и количества бандажей.
2. Определение зависимости параметров пятна контакта от
реологических свойств РО и стадии уплотнения грунта.
1. Определение степени влияния жѐсткости РО на напряжѐнно-деформируемое состояние
виброуплотняемой среды;
2. Определение тенденций распределения напряжений по глубине уплотняемого слоя среды с
учѐтом жѐсткости РО;
3. Определение интенсивности распространения виброускорений в уплотняемой среде с
учѐтом жѐсткости РО;
4. Установление влияния частоты приложения внешней силы на величину виброускорений в
уплотняемой среде;
5. Установление влияния жесткости РО и параметров пятна контакта на время приложения
внешней силы и интенсивность деформирования среды;
6. Определение влияния жѐсткости РО на время уплотнения и скорость движения катка.
ВЫХОД
ПРОЦЕСС
Теоретические исследования
Анализ влияния жѐсткости РО на
напряжѐнно-деформируемое
состояние среды
Экспериментальные исследования процесса уплотнения
грунтов вибрационными катками с пневмошинными
рабочими органами
Анализ эффективности применения вибрационных
катков с пневмошинными РО
1. Обоснование необходимости применения вибрационных катков с пневмошинными РО, способными за счѐт изменения
жѐсткости адаптироваться
РО к изменяющимся свойствам виброуплотняемой среды по времени и частоте приложения
внешней силы;
2. Математическая модель процесса уплотнения упруго-вязкой среды вибрационными катками с пневмошинными рабочими
органами;
3. Определение влияния жѐсткости РО на изменение напряжѐнно-деформируемого состояния среды и интенсивность
процесса уплотнения;
4. Определение степени влияния жѐсткости РО на энергоэффективность виброуплотнения по значениям виброускорений в
уплотняемой среде;
5. Разработка новых конструкций пневмошинных органов вибрационных катков и инженерных методик обоснования их
параметров;
6. Оптимизация параметров (симплекс-метод) вибрационных катков с пневмошинными РО с учѐтом коэффициента
уплотнения, как критерия эффективности процесса уплотнения грунтов;
8. Разработка технологических рекомендаций уплотнения грунтов вибрационными катками с пневмошинными РО;
7. Расчѐт экономической эффективности применения вибрационных катков с пневмошинными РО
Рисунок 1.25 – Общая структура работы
44
2. АНАЛИЗ ТЕОРЕТИЧЕСКИХ ПРЕДПОСЫЛОК ИНТЕНСИФИКАЦИИ
ПРОЦЕССА УПЛОТНЕНИЯ ГРУНТОВ ДОРОЖНЫМИ КАТКАМИ
Теоретическое обоснование возможностей интенсификации процесса уплотнения грунтов, в первую очередь, должно строиться на анализе физических процессов, происходящих внутри обрабатываемой грунтовой среды. Наличие грунтов
с различными физико-механическими свойствами требует использования различных типов уплотняющих средств. Отсутствие способности уплотнителей в широком диапазоне адаптироваться по контактным напряжениям к изменению плотности и прочности грунтов в процессе их деформирования требует использования
нескольких типоразмеров (по массе) уплотнителей. Проблема интенсификации
процесса уплотнения грунтов должна решаться за счѐт новых перспективных уплотняющих средств, разработка которых невозможна без понимания сущности
физических процессов, происходящих при деформации грунтов.
Исследованиями
в данной области
занимались
такие
учѐные, как
В. Ф. Бабков, О. Т. Батраков, Д. Д. Баркан, И. И. Блехман, А. А. Борщевский,
И. И. Быховский, С. А. Варганов, Г. Ю. Джанилидзе, А. Е. Дубровин,
С. В. Жиркович, А. В. Захаренко, Н. Н. Иванов, А. С. Ильин, Я. А. Калужский,
Н. И. Наумец, М. П. Костельов, Г. В. Кустарев, В. Б. Пермяков, Г.Н. Попов,
Н. Я. Хархута, W. V. Ping, P. E. Guiyan Xing, Michael Leonard, Zenghai Yang,
Michael A. Mooney, Robert V. Rinehart, Paulvan Susante и д.р. [8, 15, 16, 34, 35, 65,
67, 70, 75, 84, 132, 143, 147, 148, 158 – 160, 163 – 165 и т. д.].
2.1. Анализ влияния характеристик грунтов на интенсивность процесса
уплотнения
Характеристики грунтов как уплотняемой среды имеют первостепенное значение, с точки зрения развития в них напряженно-деформируемого состояния и
45
интенсивности накопления пластических деформаций, при приложении внешней
уплотняющей силы.
Разнообразие типов грунтов требует применения соответствующих классификаций грунтов по физико-механическим и реологическим свойствам, опираясь
на которые необходимо создавать перспективную уплотняющую технику и совершенствовать технологический процесс уплотнения грунтовых сред.
Исследованиями свойств грунтовых сред занимались такие учѐные, как проф.
К. А. Артемьев, проф. В. Ф. Бабков, проф. Д. Д. Баркан, проф. А. К. Бируля, проф.
С. С. Вялов, проф. В. М. Безрук, проф. Н Н. Иванов и др. [4, 7 –9, 11 – 26, 31 – 36,
65, 67, 75, 84, 132, 143, 147, 148, 158 – 160, 163 – 165 и т.д.]. Объем исследований
по этой теме настолько велик, что полная его систематизация в данной работе не
представляется возможной. В то же время, большинство вышеперечисленных
учѐных сходится во мнении, что для полноценного исследования возможностей
интенсификации уплотнения грунтов необходимо знать и систематизировать такие их основные свойства и характеристики, как гранулометрический фракционный состав, объѐмный вес, модуль деформации, оптимальная влажность, угол
внутреннего трения, жѐсткость, кинематическая и динамическая вязкости.
2.1.1. Анализ влияния структурного состояния грунтов на интенсивность
процесса уплотнения
Исследования в области грунтоведения показывают, что структура грунта
определяется формой и размерами грунтовых частиц и их взаимным расположением и взаимодействием. Форма твердых частиц может быть угловатой, округлой,
пластинчатой, чешуйчатой. Различают три основных типа структуры грунтов осадочного происхождения: зернистую, сотообразную (губчатую) и хлопьевидную
(рисунок 2.1) [9, 26, 42].
46
Зернистая структура характерна для несвязных грунтов (песок, гравий и др.).
Взаимное расположение отдельных частиц зависит от условий их отложения и
может изменяться от рыхлого до плотного. Сотообразная (губчатая) структура
свойственна глинистым грунтам. Хлопьевидная структура образуется при осаждении в воде коллоидных частиц [9, 26].
б
а
в
а – зернистая; б – сотообразная (губчатая); в – хлопьевидная
Рисунок 2.1 – Основные типы структуры грунтов
Структуры глинистых грунтов, в зависимости от физико-химических условий
формирования горных пород, П.А. Ребиндер предложил подразделить на два основных
типа:
коагуляционно-тиксотропные
и
конденсационно-
кристаллизационные [96].
Коагуляционно-тиксотропные
структуры
характеризуются
водно-
коллоидными связями. Поскольку толщина пленок, а соответственно и величина
межмолекулярных сил, зависит от плотности грунта, то первичное сцепление повышается при уплотнении грунта. Эти связи малопрочны и после разрыва восстанавливаются, т.е. способны к тиксотропному упрочнению. Примером коагуляционно-тиксотропных структур является глиняная паста [26, 96]. В таких грунтах
ярко выражены вязкие силы, которые в значительной степени зависят от влажности. В процессе их уплотнения помимо структурного сопротивления необходимо
стремиться снижать вязкую составляющую сопротивления деформированию.
Изучением прессования подобных структур занимались В. Н. Тарасов, Ф. И.
Шлегель и др. [134].
47
В конденсационно-кристаллизационных структурах частицы соединены непосредственно, без разделения их водной пленкой. Под конденсационными связями имеют в виду сухие контакты между частицами; такие контакты могут возникнуть при непосредственном сближении частиц в результате испарения влаги и
пр. Под кристаллизационными связями подразумевают химические связи, возникающие в процессе диагенеза в результате цементации; они являются жесткими и
могут быть нарушены лишь при приложении достаточно большого напряжения.
Нарушенные кристаллизационные связи не восстанавливаются. У осадочных пород кристаллические связи возникают в результате химических, физических, биохимических и других процессов. Поэтому в осадочных породах кристаллизационные связи являются, по классификации Н. Я. Денисова, вторичными [26, 96]. Особенности такой структуры позволяют достаточно интенсивно снижать структурное сопротивление уплотнению за счѐт снижения сил трения и сцепления при использовании динамических способов, тем самым повышая интенсивность процесса уплотнения.
Классифицируя грунты по характеру их структурных связей. М. М. Горькова,
развивая классификацию П.А. Ребиндера, предложила подразделять структуры
дисперсных грунтов в зависимости от степени их агрегированности, т.е. соотношения содержания частиц по данным гранулометрического и микроагрегатного
анализов, поскольку именно этот показатель определяет характер взаимодействия
частиц [26, 96].
Стабилизационные структуры с частицами менее 1 мкм имеют коэффициент
агрегированности, равный 1. Эти структуры образуются у тонкодисперсных пород при наличии на поверхности частиц гидрофильных стабилизаторов, препятствующих слипанию частиц. Наличие стабилизаторов приводит к увеличению адсорбционного слоя воды вокруг частиц и соответственно снижает прочность
грунта. Стабилизационные структуры характерны для осадочных пород, образующихся в щелочной среде [26, 43].
Коагуляционные структуры с частицами менее 2 мкм имеют коэффициент
агрегированности, равный 4,5–5, и для частиц менее 5 мкм, равный 1. Эти струк-
48
туры характерны для пород, содержащих небольшое (до 1,5%) количество электролита, что приводит к структурной коагуляции и образованию структурного
каркаса. Межчастичные связи у коагуляционной структуры значительно выше,
чем у стабилизационной [43].
Пластифицированно-коагуляционные структуры характеризуются значением
коэффициента коагуляции, не превышающим 3 для частиц менее 1 мкм, и коэффициентом 2 – для частиц менее 5 мкм. Эти структуры образуются также в условиях коагуляционного структурообразования, но в присутствии пластифицирующих органических соединений (более 0,7%), в особенности карбонатов кальция
(до 50%). Концентрация электролитов колеблется в широких пределах — от 0,3
до 10% [26, 43].
Смешанные
коагуляционно-кристаллизационные
или
коагуляционно-
конденсационные структуры характеризуются значением коэффициента агрегированности от 6 до 38 для частиц менее 1 мкм и от 2 до 30 — частиц менее 5 мкм.
Эти структуры имеют коагуляционно-цементные связи, обусловленные, как уже
отмечалось, помимо межчастичных еще и внутримолекулярными силами химической природы. Подобные связи, отличающиеся большой прочностью, хрупкостью
и водостойкостью, возникают при цементации пород аморфным кремнеземом,
окислами железа и др. [9, 26, 96].
С точки зрения интенсификации уплотнения связанных грунтов, наиболее
подходящими являются грунты с конденсационно-кристаллизационной структурой, так как они обладают более жесткими связями, чем коагуляционнотиксотропные структуры, характеризуемые малопрочными водно-коллоидными
связями, способными к тиксотропному восстановлению.
В процессе виброуплотнения дисперсных грунтов, грунты с коагуляционной
структурой легко разрушаются и быстро восстанавливаются за счет образования
структурного каркаса. Смешанные коагуляционно-кристаллизационные и коагуляционно-конденсационные структуры отличаются большей прочностью, хрупкостью и водостойкостью и в меньшей степени подвержены действию вибрации.
49
2. 1. 2. Анализ влияния физико-механических свойств грунтов
на интенсивность процесса уплотнения
Физико-механические свойства грунтов как уплотняемой среды (таблицы 2.1
– 2.4) являются наиболее важными показателями, с точки зрения прогнозирования
поведения грунтовой среды при приложении к ней внешних воздействий. Зная
эти свойства и тенденции их изменения, в процессе уплотнения можно обоснованно выбирать уплотняющие средства и рациональные режимы обработки грунта.
Таблица 2.1 – Модуль упругости грунта
Грунт
Расчетные значения модуля упругости Еу, МПа, при разном коэффициенте уплотнения, ку
0,50 0,55 0,60 0,65 0,70 0,75 0,80 0,85 0,90 0,95
Супесь легкая
70
Песок пылеватый
96
Суглинок легкий и тяже108
лый, глина
Супесь пылеватая, суглинок
108
легкий пылеватый
60
90
56
84
53
78
49
72
45
66
43
60
42
54
41
48
40
43
90
72
50
41
34
29
25
24
23
90
72
54
46
38
32
27
26
25
Рисунок 2.2 – Зависимость динамического предела прочности грунтов ζпр
от влажности (в долях от оптимальной) по данным [42, 43, 89]
50
Основными физико-механическими показателями грунтов, с точки зрения их
деформативности, являются: предел прочности ζпр, плотность ρ, объемный вес γг,
угол внутреннего трения грунта θ, сцепление С, в зависимости от коэффициента
уплотнения ку, модули деформации и упругости грунта Е, Еу, реологические показатели и др.
Таблица 2.2 – Пределы прочности грунтов оптимальной влажности
при уплотнении пневмоколесными катками (статическая укатка) [131, 134, 147]
Пределы прочности грунтов пр , МПа при
Грунт
коэффициенте уплотнения ку
Малосвязанный (песчаный, супесчаный пылеватый)
Средней связанности (суглинистый)
Высокой связанности
(тяжелосуглинистый)
Весьма связанный (глинистый)
0,95
1,00
0,3 – 0,4
0,39 – 0,52
0,4 – 0,6
0,64 – 0,96
0,6 – 0,8
0,96 – 1,28
0,8 – 1,0
1,28 – 1,60
Рисунок 2.3 – Зависимость плотности ρ от влажности грунта W (динамическое воздействие) [147]
51
Рисунок 2.4 – Зависимость предела прочности грунтов ζпр от ку (динамическое воздействие) [147]
Таблица 2.3 – Среднее значение коэффициента Пуассона ν и модуля деформации Е [147]
Грунт
ν
Е, МПа
Песок и супесь
0,3
ест. 21–23 водонас. 16
Суглинок
0,35
9–10
Глина
0,42
13
На основе исследований [131] процесса уплотнения грунтов пневмошинными
катками были получены зависимости распределения плотностей по глубине уплотняемых грунтов, а также зависимости между плотностями и влажностями на
различных стадиях процесса уплотнения (рисунки 2.2 – 2.4). Определялся предел
прочности, зависящий от текущей плотности (стадии уплотнения) и влажности
грунта. Фактор влажности оказывает особенное влияние на предел прочности
грунта, и особенно в случае связных грунтов, где со снижением влажности предел
прочности прогрессивно возрастает.
52
Таблица 2.4 – Характеристики грунтов в зависимости от их консистенции
Консистенция
Показатель
грунта
текучести IL
Твердая
Глина
Суглинок
Супесь
ρ,
θ,
С,
ρ,
θ,
С,
ρ,
θ,
С,
т/м3
град
Н/м2
т/м3
град
Н/м2
т/м3
град
Н/м2
IL ˂ 0
2,15
22
0,001
2,15
25
0,006
2,05
28
0,002
Полутвердая
0 ≤ IL≤ 0,25
2,10
20
0,006
2,10
23
0,004
2,00
26
0,0015
Тугопластичная
0,25 ≤ IL≤ 0,50
2,05
18
0,004
2,00
21
0,0025
1,95
24
0,001
Мягкопластичная
0,50 < IL≤ 0,75
1,95
14
0,002
1,90
17
0,0015
1,90
20
0,0005
Текучепластичная
0,75 < IL≤ 1
1,90
8
0,001
1,85
13
0,001
1,85
18
0,0002
Текучая
IL > 1
1,80
6
0,0005
1,80
10
0,0005
1,80
14
0,00001
53
В таблице 2.4 представлены некоторые физико-механические свойства разных типов грунтов при их различной консистенции. Здесь можно отметить, что
консистенция грунта в значительной степени зависит от влажности [26, 147] и,
согласно исследованиям проф. В. Б. Пермякова [87], процесс уплотнения должен
осуществляться в границах от предела текучести до предела прочности материала, что соответствует диапазону от полутвѐрдой до текучепластичной консистенции грунта. Необходимо учитывать изменение состояния грунтов на различных
стадиях уплотнения, что позволит повысить интенсивность накопления остаточных деформаций в уплотняемом грунтовом слое.
Рисунок 2.5 – Распределение плотности по глубине
уплотняемого слоя суглинка [131]
Таблица 2.5 – Распределение плотности по глубине уплотняемого слоя суглинка
№ линии
1
2
3
4
5
Масса катка, т
20
45
Fст, кН
22,2
50,0
50,0
100,0
100,0
рw, МПа
0,56
0,63
0,98
0,63
0,98
54
В процессе уплотнения грунтовых слоев необходимо учитывать факторы,
влияющие на распределение плотности по толщине слоя. Равномерное распределение плотности позволяет получить более устойчивую и долговечную структуру
грунтовой насыпи. На рисунках 2.5, 2.6 и в таблицах 2.5, 2.6 представлены зависимости влияния влажности, силы тяжести катка и внутреннего давления в шинах
на распределение плотности по толщине уплотняемого слоя суглинистого грунта.
Анализ зависимостей показывает, что наиболее равномерное распределение плотности (с учѐтом стадии процесса уплотнения) наблюдается при максимальной
внешней силе и при максимальных представленных давлениях, что соответствует
максимальным значениям контактных напряжений под РО катка.
Рисунок 2.6 – Зависимости между плотностью и влажностью
суглинка при различных уплотняющих нагрузках [131]
Таблица 2.6 – Зависимости между плотностью и влажностью суглинка
55
№ линии
1
2
3
4
5
Масса катка, т
45
20
12
Fст, кН
100,0
100,0
50,0
22,2
13,3
рw, МПа
0,88
0,63
0,63
0,56
0,25
Одним из основных показателей уплотняемости грунтов является модуль
общей деформации Е, который характеризует способность грунтов сопротивляться внешним нагрузкам. Согласно СНиПам, для расчѐтов рекомендуется принимать значения модуля линейной деформации в соответствии с данными таблицы
2.7.
Таблица 2.7 – Значения модуля деформации грунтов
Тип грунта
Модуль деформации Е, МПа
Пески средние и крупные
30-50
Пески мелкие и пылеватые
11-48
Глинистые
5-40
С точки зрения протекания процесса уплотнения, исследователям может быть
интересна упругая часть Еу модуля общей деформации Е. Этот показатель характеризует восстанавливающуюся после снятия нагрузки часть общей деформации
и позволяет рассчитать невосстанавливающиеся пластические деформации, которые и обуславливают процесс уплотнения грунтов. Согласно исследованиям Д. Д.
Баркана [11, 14], значения Еу возрастают от степени связанности грунта (таблица
2.8) и требуют более длительного времени действия внешней уплотняющей силы
по сравнению с несвязанными грунтами.
56
Таблица 2.8 – Значения упругого модуля деформации грунтов
Тип грунта
Модуль упругости Еу, МПа
Песок
83
Суглинок
31-295
Лѐсс
100-130
Немаловажным фактором, влияющим на протекание процесса уплотнения,
являются вязкостные свойства грунта, которые характеризуются динамической
вязкостью . Эти значения неодинаково изменяются на ветвях нагрузки и разгрузки и, согласно исследованиям В. А. Анфимова, Я. А. Калужского, О.Т. Батракова, В. Ф. Бабкова и др. авторов [5, 9, 35, 42, 68, 146, 147], в значительной степени зависят от количества жидкой фазы. Значения вязкости приведены в таблице
2.9 и на рисунке 2.7.
Таблица 2.9 – Значения вязкости η в зависимости от влажности среднесуглинистого грунта
Объѐмный вес скелета грунта, Н/м3
Влажность
12100
13000
грунта
0,4Wт
14000
Вязкость, Н·с/м2
н
р
19200·105
46200·105
5
н
5
р
–
н
–
5
р
–
5
–
5
0,5Wт
2100·10
9640·10
4400·10
15750·10
11000·10
21000·105
0,6Wт
330·105
4890·105
780·105
5300·105
1100·105
5360·105
57
н , Н с/м 2
х10 8
20
16
12
1
8
4
2
3
3
1 при г = 12100 Н/м
3
2 при г = 13000 Н/м
3
3 при г = 14000 Н/м
Относительная влажность
0,3WT
W/WT
0,4WT
0,5WT
10
20
1
2
3
30
40
50
60
х10 8
р , Н с/м2
Рисунок 2.7 – График зависимости вязкости грунта
от его влажности
С увеличением содержания глинистых частиц прочность грунта возрастает до
1,5–2 раз по сравнению с песчаными грунтами. Реальная влажность связных грун-
58
тов является очень важным показателем, влияющим не только на их прочность,
но и на уплотняемость. Наилучшим образом такие грунты уплотняются при оптимальной влажности. С превышением реальной влажности этого оптимума снижается прочность грунта в связи со снижением конечной плотности грунта. Наоборот, с уменьшением влажности ниже оптимального уровня предел прочности
резко возрастает (при 85% от оптимальной – в 1,5 раза, а при 75% – до 2 раз), но
при этом резко увеличивается энергоѐмкость процесса уплотнения.
По мере уплотнения грунта растет и его прочность. В частности, по достижении в насыпи коэффициента уплотнения 0,95 прочность связного грунта повышается в 1,5–1,6 раза, а при ку=1,0 – в 2,2–2,3 раза по сравнению с прочностью в начальный момент уплотнения (коэффициент уплотнения 0,80–0,85) [63, 143, 147].
Из графической зависимости (рисунок 2.7) видно, что вязкость связанного
грунта на ветвях нагрузки и разгрузки значительно отличается. Глинистые грунты
обладают выраженными реологическими свойствами вследствие их пластичности; динамическая прочность на сжатие может возрасти в 1,5–2 раза при времени
их нагружения 20 мс (0,020 сек), что соответствует частоте приложения виброударной нагрузки 25–30 Гц, а на сдвиг – даже до 2,5 раз по сравнению
со статической прочностью. При этом динамический модуль деформации таких
грунтов повышается до 3–5 раз и более.
Это свидетельствует о необходимости прикладывать к связным грунтам более высокие уплотняющие напряжения динамического характера, чем статического, чтобы получить одну и ту же деформацию и результат уплотнения. Поэтому
некоторые связанные грунты можно было эффективно уплотнять статическими
напряжениями 0,6–0,7 МПа (пневмокатки), а при трамбовании потребовались динамические напряжения порядка 1,5–2,0 МПа.
Такое различие в необходимых для уплотнения напряжений обусловлено
значительно возрастающей при ударном нагружении величиной вязкой составляющей силы сопротивления, которая пропорциональна скорости деформирования материала. Со скоростью изменения напряженного состояния связного грунта
в 10 раз его прочность повышается в 1,5–1,6 раза, а в 100 раз – до 2,5 раз. У пнев-
59
моколесного катка скорость изменения контактных напряжений во времени составляет 3–5 МПа/с, у трамбовок и виброкатков – около 300–350 МПа/с, т.е. повышение составляет 70–100 раз.
Очевидно, что для интенсификации процесса уплотнения грунтов, особенно
связанных, необходимо снижать вязкую составляющую силы сопротивления деформированию. Как показал вышеприведенный анализ, этого можно достичь,
уменьшая скорость деформирования грунта (и) или увеличивая время действия на
него, что также позволяет преодолеть вязкие сопротивления.
Пневмошинные катки способны увеличивать время действия на грунт увеличивая пятно контакта, уменьшая внутреннее давление в шинах, не снижая скоростного режима обработки. Для вибрационных катков с металлическими вальцами
единственный путь увеличения времени уплотнения – это снижение скорости
катка, что по понятным причинам (снижается производительность) нежелательно.
Тем не менее, именно увеличение времени действия контактных напряжений, при
динамическом нагружении уплотняемого грунта, позволит добиться решения поставленных задач по интенсификации процесса уплотнения.
Ориентировочные данные по пределам прочности грунтов с коэффициентом
плотности 0,95 при статическом и динамическом их нагружении установлены
профессором Н.Я. Хархутой (таблица 2.10) [147].
Следует отметить, что с повышением плотности до 1,0 (100 %) динамическая
прочность на сжатие некоторых высокосвязных глин оптимальной влажности
возрастет до 3,5–3,8 МПа [72, 79]. При снижении влажности до 80% от оптимальной, что может быть в теплых, жарких или засушливых местах ряда стран, их
прочность может достигать еще больших значений: 3,5–4,5 МПа (плотность 95%)
и даже 6,0–7,0 МПа (100%).
60
Таблица 2.10 – Значения пределов прочности грунтов
Тип грунта
Cпособ
уплотнения
несвязный и малосвязный (песчаный, супесчаный, в
т.ч. пылеватые),
МПа
среднесвязный
(суглинок легкий), МПа
связный (суглинок тяжелый),
МПа
высокосвязный
(глина),
МПа
0,3–0,4
0,5–0,6
0,7–0,8
0,9–1,2
0,5–0,7
0,9–1,2
1,4–1,8
2,0–2,5
Пневмокаток
Виброкаток,
трамбовка
При динамическом (вибрационном) воздействии на грунт его поведение несколько отличается от поведения при статическом уплотнении (укатке). Рядом
отечественных и зарубежных авторов было доказано [11, 14, 65, 134, 140, 163],
что сопротивление сдвигу некоторых материалов в момент их вибрирования может снижаться на 80–98%, это объясняется тем, что частицы среды приводятся в
колебательные движения, силы внутреннего трения между ними снижаются, а
значит, существенно снижается сопротивление деформированию. Это говорит о
том, что при вибрационной обработке значительно повышается интенсивность
процесса уплотнения.
Для решения практических задач по уплотнению грунтов необходимо также
знать значения показателей жѐсткости и вязкости грунтов. Эти показатели исследовались рядом авторов: Н. А. Азюковым Д. Д. Барканом, С. В. Вяловым, П. Ф.
Овчинниковым, В. Н. Сорокиным, Б. И. Филипповым и др. [3, 11, 19, 42, 130, 154,
161, 168], наиболее существенные из них жѐсткость и коэффициент вязкого трения, которые зависят не только от физико-механических свойств, но и от состояния грунта, который деформируется в процессе уплотнения.
c
ES
,
h0
(2.1)
где с - жѐсткость деформируемой среды, Н/м; Е – динамический модуль деформации, Па; S – площадь контакта, м2; h0 – толщина деформируемого слоя, м.
61
b
S
,
h0
(2.2)
где b - коэффициент вязкого трения деформируемой среды, Нс/м; η – вязкость деформируемой среды, Нс/м2.
Одним из критериев энергоэффективности протекания процесса вибрационного уплотнения грунтов, могут служить значения амплитуд виброускорений частиц обрабатываемого грунта. Профессор Д.Д. Баркан [12, 13] доказал, что эффективность виброуплотнения в наибольшей степени зависит от величины ускорения
частиц грунта. Увеличение значений виброускорений приводит к снижению диссипации энергии и интенсификации процесса уплотнения.
Экспериментальные исследования тенденций изменения виброускорений в
грунтах при вибрационном силовом воздействии проводились С. А. Варгановым,
С. В. Жирковичем, Л. Форссбладом, М. П. Костельовым [40, 54, 65, 141] и др. На
рисунке 2.8 показаны две кривые затухания нормальных ускорений колебаний
частиц грунта, при его уплотнении прицепным виброкатком ДУ-14 на двух рабочих скоростях. Критическое ускорение внутри грунтового массива составляло
(0,4–0,5)g, (около 4–5 м/с2). Из полученных графиков вытекает, что толщина прорабатываемого слоя легким виброкатком согласно исследованиям М.П. Костельова [65 – 67], составляет 35–45 см (рисунок 2.8).
На основании исследований [134] были построены две кривые – изменения
критических ускорений и их затухания, действующих от виброплиты или вибровальца, ускорений грунтовых частиц с удалением от поверхности, где располагается источник колебаний. Точка пересечения этих кривых даѐт интересующую
глубину эффективного уплотнения для песка или гравия.
62
Относительное ускорение (в долях земного)
0
10
20
30 j/g
5,0 км/ч
10
Глубина, см
20
2,5 км/ч
30
Прицепной виброкаток ДУ-14
Вес - 3000 кг;
Валец 1400х1200 мм;
Амплитуда:
номинальная - 0,6 мм
реальная - от 1,50 до1,56 мм;
Частота - 27 Гц;
Вынуждающая сила - 80 кН.
40
50
60
70
ку=1
для суглинка
80
90
h0, см
ку=1
для песка
Рисунок 2. 8 – Кривые затухания ускорения колебаний частиц
грунта при уплотнении катком ДУ-14
Анализ виброускорений от касательных динамических нагрузок при вибрационном уплотнении исследовались С. А. Пульниковым [95], который показал,
что виброускорения от касательных сил значительно ниже, чем от нормальных.
Графики развития виброускорений от продольных перемещений в грунте, при
различных интенсивностях динамического воздействия, приведены в таблица
2.11.
Таблица 2.11 – Виброускорения от касательных нагрузок в суглинистом
грунте
Параметры
Виброускорение A, м/с2
Частота f, Гц
1
2
3
4
0 (СН)
0,03
0,07
0,20
0
40
30
50
63
Физико-механические свойства грунтов оказывают значительное влияние на
уплотнение, поскольку обуславливают их сопротивляемость деформированию.
Для интенсификации процесса уплотнения грунтов необходимо стремиться к
снижению всех составляющих сопротивления деформированию. Этого можно
достичь, применяя вибрацию (снижаются силы трения и сцепления), увеличивая
время воздействия на грунт за один цикл приложения нагрузки (снижается вязкая
сила сопротивления). Одним из показателей, характеризующих интенсивность
протекания процесса уплотнения, являются значения виброускорений в уплотняемом грунте от нормальных сил, как показал проведѐнный анализ, виброускорения от касательных сил имеют не столь решающее значение. Состояние и свойства грунтов необходимо учитывать на каждой стадии процесса уплотнения и, исходя из этого, выбирать режим обработки, позволяющий добиться минимального
сопротивления грунтов деформированию, интенсифицируя тем самым процесс
уплотнения.
2.1.3. Анализ влияния минералогического состава грунтов на интенсивность
процесса уплотнения
Минеральный состав оказывает значительное влияние на уплотняемость и
степень устойчивости грунта в инженерных сооружениях. Он резко изменяется в
зависимости от исходного состава горной породы, степени ее дробления, условий
формирования и залегания.
В природных условиях грунты, как правило, являются полиминеральными, и
применительно к каждому их виду можно говорить лишь о преимущественном
преобладании в них того или иного минерала.
В грунтах различают глинистую, песчаную и пылеватую фракции. К первой
фракции относят частицы, размером не превышающие 0,001 мм, ко второй – от
0,05 до 2 мм, к третьей — частицы, находящиеся в пределах от 0,002 до 0,05 мм.
Форма наиболее крупных песчаных частиц может быть округлой (речные пески) и
угловатой (горные пески). Пылеватые частицы, состоящие из очень мелких об-
64
ломков отдельных минералов, в большинстве случаев кварца и аморфной кремнекислоты, приближаются к сферической форме [12, 13].
Твердые минеральные частицы взаимодействуют с имеющейся в грунтах
жидкой фазой — водой. Характер этого взаимодействия является основным фактором, определяющим физические и механические свойства грунтов, влияющие
на их уплотняемость. На природу удержания воды в грунтах существует несколько воззрений. По одному из них, вода в грунтах удерживается капиллярными силами. Этим же объясняется и связность грунтов. Впервые это предположение высказал К. Терцаги [167], он считал, что действие капиллярных сил усиливается
тем обстоятельством, что вода в узких капиллярах обладает иными свойствами:
она как бы отвердевает, теряя способность к испарению [167]. Лебедевым А. Ф.
[71] было высказано предположение, что вода в грунтах удерживается молекулярными силами, возникающими между минеральными частицами и молекулами
воды. Действие капиллярных сил А. Ф. Лебедевым не исключается, но им он отводит второстепенную роль.
Глинистые (коллоидно-дисперсные) минералы разделяют на три основные
группы: 1) каолиниты, 2) гидрослюды и 3) монтмориллониты. Гидрослюды по
своим свойствам занимают промежуточное положение между каолинитом и монтмориллонитом.
Монтмориллонитовые глины и рыхлые образования, имеющие многочисленные полости, которые могут быть как открытыми, так и закрытыми, уплотняются
меньшими нагрузками, но требуют длительного времени их приложения.
Карбонаты в грунтах представлены преимущественно кальцитом и доломитом. Наличие их в глинистых грунтах обусловливает меньшую смачиваемость водой и способствует улучшению свойств, характеризующих способности к уплотнению. В таких грунтах меньше выражено вязкое сопротивление деформированию.
К водорастворимым минералам относятся гипс, галит, сильвин. Гипс характеризуется сравнительно небольшой растворимостью, галит и сильвин — эти ми-
65
нералы, с точки зрения их уплотнения в инженерных насыпях, нежелательны, поскольку при наличии осадков сооружения из таких минералов будут разрушаться.
В зависимости от минералогического состава и влажности могут быть получены как рыхлые, сильно обводненные агрегаты, так и более или менее плотные
образования. В случае каолина агрегаты получаются довольно плотными, требуют приложения значительных уплотняющих нагрузок, хорошо поддаются вибрационному уплотнению.
Грунты, как правило, уплотняются в рыхлом состоянии, когда их сплошность
нарушена механизмами во время возведения насыпей. Под действием рабочих органов машин распад сплошной массы грунта на отдельные зерна и комья из-за
расклинивающего действия тонких пленок воды происходит по наиболее гидрофильным плоскостям, структура же и сцепление внутри комьев сохраняются в
прежнем виде [31, 36, 143, 147,].
Возникающие в момент соприкосновения друг с другом силы связи глинистых минеральных частиц с течением времени усиливаются, ввиду процессов старения и перекристаллизации, происходящих в водно-коллоидных пленках. Относительное движение соседних частиц такого «старого» образования может начаться лишь после того, как эти связи будут разрушены, из-за чего деформация
начнет развиваться лишь при определенной нагрузке. Этот вид связей называется
вторичной связью [147], или сцеплением упрочнения [26, 167], в отличие от связей, образующихся в первые моменты после соприкасания частиц, которые называются первичными. Таким образом, при наличии коллоидов первичные связи
при определенных условиях, в течение длительного времени, могут переходить во
вторичные [26, 167].
Влияние минералогического состава грунтов на их физико-механические
свойства признается многими исследователями [26, 141, 143, 147]. Так, по отношению к глинам это было отмечено еще П. А. Земятченским. В. В. Охотиным был
сделан вывод, что свойства глинистых грунтов целиком обусловливаются их активной поверхностью. Глины разного минералогического состава, но одинаковой
активной поверхности имеют одинаковые свойства. Многие исследователи [26,
66
84, 132, 143, 147, 148] предполагают наличие связи между гранулометрическим и
минералогическим составами природных грунтов. Для песка такая связь обнаружена А. В. Сидоренко [26]. В природных условиях мономинеральные грунты
встречаются довольно редко, и в практике строительства почти всегда приходится
иметь дело с полиминеральными грунтами, где можно говорить лишь о преобладании того или иного минерала.
Минералогический состав влияние которого на свойства грунтов, должно
обязательно учитываться при рассмотрении вопросов уплотнения. Обширные исследования были проведены Н. Я. Хархутой [143 – 147]. Исследовалось поведение
грунтов, имеющих один и тот же гранулометрический состав или одну и ту же
удельную поверхность, но глинистая фракция которых состояла из различных
минералов. Проведѐнные проф. Хархутой исследования позволили сделать вывод,
что при прочих равных условиях минералогический состав в значительной степени влияет на устойчивость грунтов к воздействию погодно-климатических факторов, связанных с возможностью увлажнения и промерзания. При уплотнении минералогический состав почти не влияет на характер поведения грунтов.
2.1.4. Анализ влияния гранулометрического состава грунтов
на интенсивность процесса уплотнения
Количественное содержание в грунтах твердых частиц того или иного размера называется гранулометрическим или механическим составом. Гранулометрические составы природных грунтов крайне разнообразны.
В таблице 2.12, согласно дорожной классификации, приведѐн фракционный
состав основных типов грунтов. Если в каком-либо грунте содержание пылеватых
частиц превышает содержание песчаных, то к наименованию грунта прибавляется
слово «пылеватый».
В результате взаимодействия частиц друг с другом и с водой грунты обладают связностью, что увеличивает необходимые для их деформирования или разрушения силы. Ввиду этого мелкие частицы грунта образуют достаточно прочные
67
грунтовые агрегаты. Связанность грунта зависит главным образом от гранулометрического состава и влажности. В песках, даже влажных, связанность проявляется
в незначительной степени, и потому эти грунты относят к несвязанным. Супеси
можно отнести к малосвязанным грунтам. Связанность особенно становится заметной в случаях суглинков и глин, поэтому последние относят к грунтам связанным. Такое разделение грунтов удобно при изучении многих процессов, связанных с их обработкой силовыми методами. Связанные грунты требуют большого
времени приложения силы и высоких контактных напряжений. Несвязанные
грунты не требуют длительного приложения нагрузки и хорошо уплотняются
вибрацией.
Таблица 2.12 – Фракционный состав грунтов
Название грунта
Песчаный
Песчаный
пылеватый
Супесчаный
Супесчаный
мелкий
Пылеватый
Суглинистый
Тяжѐлый
суглинистый
Суглинистый
пылеватый
Глинистый
Содержание фракций по весу, %
песчаных с частицами
пылеватых с частиглинистых с частидиаметром от 2,0 до 0,05
цами диаметром от
цами диаметром мемм
0,05 до 0,005 мм
нее 0,005 мм
–
15
3
–
15 - 20
3
Больше 50% (частицы
диаметром 2,0 – 0,25 мм)
Меньше 50% (частицы
диаметром 2,0 – 0,25 мм)
–
Больше
пылеватых
Больше
пылеватых
–
–
5
3 - 12
5
3 - 12
Больше песчаных
–
12
12 – 18
–
18 –25
Больше песчаных
12 –25
–
25
Песчаные грунты с преобладанием частиц размером от 0,1 до 0, 5 мм являются существенно несвязанными грунтами. Они обладают высоким внутренним
трением и водопроницаемостью, эффективно уплотняются вибрацией и невысокими контактными напряжениями. При вынужденных колебаниях силы трения
между частицами снижаются, процесс протекает интенсивно. После прекращения
процесса вибрирования внутренние связи восстанавливаются [6, 7].
68
Супеси с содержанием больше 50% (частицы диаметром 2,0 – 0,25 мм) и содержанием 3 – 12% (частицы диаметром менее 0,005 мм) относятся к несвязанным грунтам, малопластичны и даже не пластичны. Хорошо поддаются уплотнению вибрированием. При контактных напряжениях, равных 0,5 – 0,7МПа, вязкое
сопротивление деформированию выражено незначительно, поэтому скорость
процесса уплотнения достаточно высока. В плотном состоянии обладают высокой
устойчивостью, влагоустойчивы [143, 147].
Суглинки с содержанием 12–18 % (частицы диаметром менее 0,005 мм) и наличием песчаных и пылеватых частиц, относятся к связанным грунтам, обладают
значительными силами внутреннего сцепления, которые зависят от влажности.
При уплотнении в силу высокого вязкого сопротивления деформированию требуют значительного времени приложения контактных напряжений, величиной не
менее 0,7 МПа [143, 147].
Глинистые грунты с содержанием больше 25 % (частицы диаметром менее
0,005 мм) очень чувствительны к влаге, в сухом состоянии трудно уплотняемы,
при оптимальной влажности требуют длительного времени уплотнения, в переувлажнѐнном состоянии практически не уплотняются [143, 147].
Гранулометрический состав грунтов в значительной степени влияет на интенсивность уплотнения грунтов, в большей степени хорошо уплотняются несвязанные и малосвязанные грунты с относительно большими размерами частиц.
Высокое содержание глинистых частиц размером менее 0,005 мм. увеличивает
значения необходимых для уплотнения контактных напряжений и время их приложения. Высокое содержание крупных частиц более 0,5 мм хорошо уплотняются
(вибрацией), но обладают невысокой связанностью в плотном состоянии. Наиболее интенсивно уплотняются грунты с рационально подобранным грансоставом
(близкие к легким супесям). В реальных условиях для строительства используются грунты естественного залегания. Поэтому грансостав, как правило, далѐк от
оптимального. Для интенсификации процесса уплотнения грунтов того или иного
69
фракционного состава необходимо правильно выбирать способ уплотнения, значение контактных напряжений и время их приложения [143, 147].
2.2. Факторы, влияющие на интенсивность процесса уплотнения грунтов
Согласно исследованиям таких учѐных, как Н. Я. Хархута, О. Т. Батраков,
В. Ф. Бабков, Н. Н. Иванов, В. Б. Пермяков, А. В. Захаренко [8, 15, 16, 57, 84, 87,
132, 143, 144, 147] и др., наиболее значимыми факторами, влияющими на интенсивность процесса уплотнения являются: влажность W, величина контактных напряжений ζ, скорость деформирования среды dх/dt, толщина уплотняемого слоя
h 0.
2.2.1. Величина контактных напряжений
Учет физико-механических свойств грунтов при выборе средств уплотнения
касается прежде всего тех напряжений, которые развиваются на поверхности контакта рабочих органов машин с уплотняемым грунтом. При больших напряжениях происходят разрушения сплошности грунта, а вследствие этого чрезмерное погружение в грунт рабочих органов машин. В итоге грунт не столько уплотняется,
сколько выдавливается в стороны. При небольших контактных напряжениях почти вся деформация развивается как деформация уплотнения, однако она мала, и
потому интенсивность процесса недостаточна.
Следовательно, имеются какие-то определенные значения контактных напряжений, при которых обеспечивается нормальное течение процесса, когда вся
или почти вся деформация развивается в результате сближения отдельных частиц
и их агрегатов, т.е. в результате уплотнения грунта, и при этих условиях деформация максимальна.
Согласно Н. Я. Хархуте [143, 147], значения контактных напряжений должны
соответствовать пределу прочности грунта. Проф. Пермяков [84] уточнил данное
положение, связав с характеристиками грунта предел прочности и предел текуче-
70
сти, ограничив не только верхний, но и нижний пределы контактных напряжений
выражением
(2.3)
т (t i )(t i )пр (t i ) ,
где ζт(ti) - предел текучести уплотняемого материала, соответствующий времени
ti, МПа; ζ(ti) – контактные напряжения, соответствующие времени ti, МПа; ζпр(ti) –
предел прочности уплотняемого материала, соответствующий времени ti, МПа.
На рисунке 2.9 представлена графическая зависимость изменения контактных
напряжений с точки зрения эффективного протекания процесса уплотнения.
пр
Напряжения, Па
т
Зона активного
накопления
вязкопластичных
(остаточных)
деформаций
т
пр
Относительная деформация
Рисунок 2.9 – Диаграмма испытания грунтовых
образцов «ζ - ε»
Если грунт деформировать посредством плоского жесткого штампа и силу
постепенно повышать, то вначале (при малых контактных напряжениях, ниже ζт),
деформация сосредотачивается в небольшом объеме грунта, расположенном
вблизи контактной поверхности. С ростом контактного напряжения деформации
постепенно распространяются на все большую часть объема грунта, наиболее ярко эта тенденция начинает проявляться при превышении контактных напряжений
71
выше ζт. На рисунке 2.9 эта зона обозначена штриховкой – зона активного накопления остаточных деформаций. Наконец, наступает момент, когда, при продолжающемся увеличении напряжения, рост деформируемой зоны практически прекращается (точка соответствует ζпр), а затем начинается разрушение материала,
т.е. потенциальные возможности такого роста, определяемые поперечными размерами контактной поверхности, оказываются исчерпанными. При этом грунт,
расположенный в определенной зоне, имеет одинаковую плотность. Эта зона с
верхней стороны ограничена поверхностью, которая может быть принята полусферической. Расположенный в этой зоне грунт называют уплотненным ядром
[147].
При уплотнении грунтов гладковальцовыми и пневмошинными катками контактные напряжения не должны превосходить пределов прочностей грунта, так
как в противном случае он будет выжиматься из-под рабочих органов машин. В
результате верхняя часть уплотняемого грунта окажется разрыхленной [143, 147].
Исключением из этого правила являются кулачковые и решетчатые катки,
контактные напряжения у которых в 1,5-2 раза превышают пределы прочностей
грунтов. Это объясняется тем, что у данных катков «ядра» уплотнѐнного грунта
начинают образовываться на определѐнной глубине, когда рабочие органы погружаются в рыхлый грунт всей поверхностью. На этом этапе в большей степени
формируется нижний, более прочный, слой, на следующем этапе происходит уплотнения верхнего слоя, также приобретающего необходимую плотность и прочность, соответствующие контактным напряжениям таких катков.
Во избежание снижения эффекта уплотнения контактные напряжения не
должны быть и слишком низкими. Лучший эффект получается в тех случаях, когда контактные напряжения под рабочими органами катков с гладкими вальцами,
на пневматических шинах и трамбующих машин будут по возможности близкими
к нему, т.е. составят 0,9 1 пр , где σ пр - предел прочности [147].
Большой практический интерес представляют значения контактных напряжений, ниже которых требуемая плотность грунта, даже при неограниченно
большом числе проходов машин, уже не может быть достигнута. Эта зависимость
72
для каждой нагрузки отображается экспоненциальными кривыми (рисунок 2.10)
[147].
ε, ρ
σ1 > σ2 > σ3
σ3
σ2
ρ
0
А В
С
σ1
t
Рисунок 2.10 – Зависимость относительной деформации
(плотности грунта ρ) от времени t или числа приложений
внешней силы n при разных контактных напряжениях
Какая-либо плотность ρ может быть достигнута при различных напряжениях,
но действующих в течение разного времени. Необходимая продолжительность
действия напряжений, и число их приложений возрастают с уменьшением напряжения. Таким образом, недостаток в напряжении может быть до некоторой степени компенсирован увеличением времени действия силы или числа ее приложений.
Вместе с тем, давление и продолжительность его действия влияют на деформацию неодинаково, и потому возможности такой компенсации ограничены. Каждому значению контактного напряжения соответствует своя предельная деформация, выше которой она практически развиваться не будет, даже и при очень
большой продолжительности его действия. Поэтому каждой плотности соответст-
73
вует какое-то минимальное значение контактного напряжения, ниже которого эта
плотность достигнута быть не может. Опытным путем применительно к разным
значениям плотностей установлены следующие минимальные значения контактных напряжений в таблице 2.13 [147].
Таблица 2.13 – Значения максимальных контактных напряжений
Требуемая плотность
грунта в долях от ρ max .
Максимальное давление в
долях от σ пр
0,90
0,95
0,98
1
0,2–0,3
0,3–0,4
0,6–0,7
0,8–0,9
Указанная плотность достигается в пределах активной зоны. Таким образом,
средство уплотнения необходимо выбирать по развиваемому им контактному напряжению в зависимости от требуемой плотности. При таком выборе следует
прежде всего убедиться, что требуемая плотность при данных конкретных условиях работы может быть достигнута.
Следует иметь в виду, что приведенные здесь минимальные напряжения вовсе не являются наиболее эффективными, так как чем меньше контактное напряжение, тем большее время понадобится для достижения требуемой плотности
грунта и, следовательно, тем меньше будет производительность машины. Наиболее выгоден случай, когда контактное напряжение имеет оптимальную величину,
равную 0,9 1,0 пр [143, 147].
Контактные напряжения должны быть близкими к пределу прочности в течение всего процесса уплотнения грунта. Пределы прочности зависят от плотности,
повышаясь с ее увеличением (рисунок 2.11.). При укатке, когда контактные напряжения превышают предел прочности грунта, происходит сильное волнообразование поверхности, сопровождающееся появлением трещин.
74
σпр /σpo
1,2
0,8
0,4
0,80
0,85
.
..
0,90
.
.
0,95
/max
Рисунок. 2.11 – Зависимость предела прочности связного грунта
от его плотности при оптимальной влажности [135]
В процессе уплотнения контактные напряжения должны повышаться постепенно. Напряжения первых проходов необходимо выбирать по пределу прочности, соответствующему начальному состоянию грунта. Постепенное увеличение
контактных напряжений – основное правило уплотнения, обеспечивающее получение плотной и прочной структуры [147].
При работе машин контактные напряжения в известных пределах повышаются автоматически, главным образом, благодаря увеличению плотности грунта и
уменьшению площади контакта. Обычно они возрастают в 1,5-2 раза [147]. Однако для достижения нормативной плотности (ку=0,98 – 1,0) необходимо, чтобы они
возрастали в 3-4 раза. Поэтому грунты следует уплотнять двумя машинами: легкой и тяжелой. Легкая машина служит для предварительного уплотнения грунта,
тяжелая – для окончательного доведения его до требуемой плотности. Исследования показали, что при такой технологии на 20-25% снижается общее число проходов машин и экономия достигает 30% от общей стоимости работ по уплотнению [143, 147]. Экономия образуется не только в результате уменьшения общего
числа проходов, но еще и потому, что значительная часть их совершается более
легкой, поэтому более дешевой машиной. Контактные напряжения последнего
прохода легкой машины и первого прохода тяжелой машины должны быть равны.
Из этих соображений и следует подбирать параметры машин [143, 147].
75
Предварительное уплотнение грунта более легкими средствами можно не
применять лишь в том случае, если грунты до начала работы уплотняющих машин имели плотность не ниже 0,9 max , т.е. при возведении насыпей скреперами
[143, 147].
Вибрационные катки как прицепные, так и самоходные, динамически воздействуют на среду в вибрационном или виброударном режимах. Напряженнодеформируемое состояние среды при этом несколько отличается от состояния при
статической укатке, сказываются цикличность приложения нагрузки за очень малый отрезок времени и импульсная природа приложения нагрузки. Поэтому в зависимости от величины относительной возмущающей силы удар вальца о грунт
происходит за два, три и более оборотов эксцентрикового вала. Опытами
Г.Н.Попова [91, 92] установлено, что переход к ударному режиму (рисунок 1.19,
точка В) происходит при F0 2 Fст . Можно полагать, что размах колебаний вальца катка увеличивается прямо пропорционально относительной величине возмущающей силы. Такая закономерность имеет место до F0 8 Fст , после чего она
приобретает экспоненциальный характер. С повышением возмущающей силы
возрастают контактные напряжения и напряженное состояние грунта. При прочих
равных условиях увеличение диаметра вальца приводит к уменьшению контактных напряжений. Максимальное контактное напряжение, как показывают исследования [143, 147], с погрешностью до 7-10% может быть определено как
max 0,5
qв Е
,
R
(2.4)
где q в - линейное давление, которое должно быть найдено с учетом действия возмущающей силы, Н/м.
Контактные напряжения, один из основных факторов, влияющих на интенсивность процесса уплотнения, должны увеличиваться по мере увеличения плотности и прочности грунтов.
76
2.2.2. Скорость деформирования уплотняемой среды
Под скоростью изменения напряженного состояния из понимается первая
производная от напряжения по времени
из d / dt ,
(2.5)
которая, при линейном изменении напряжения во времени принимает вид
из / t .
(2.6)
Деформация у неупрочненных связных грунтов, нагружаемых с небольшой
скоростью изменения напряженного состояния – менее 0,01 МПа/с, начинает
развиваться одновременно с возрастанием напряжения (рисунок 2.12, б) [147].
Для связных грунтов между напряжением и деформацией с возрастанием
нагрузки существует линейная зависимость, в случае несвязных грунтов эта
зависимость становится нелинейной.
Для упрочненных и неупрочненных грунтов, нагружаемых со скоростями
изменения напряженного состояния более 0,01 МПа/с, наблюдается запаздывание
в развитии деформации, которое на диаграммах (рисунок 2.12) определяется
отрезками ОА, соответствующими напряжению 1 .
Это запаздывание – следствие инерционных и вязких свойств грунта.
Опытным путем установлено, что оно прямо пропорционально логарифму
скорости изменения напряженного состояния. При деформации упрочненных
грунтов
запаздывание
происходит
и
при
малых
скоростях
изменения
напряженного состояния. Здесь оно является следствием сцепления между
грунтовыми частицами и агрегатами, которое развивается в результате
упрочнения грунта многократным приложением циклических нагрузок. Если к
такому упрочненному грунту приложить нагрузку, при которой напряжение будет
равно или меньше 1 , то как бы долго такая нагрузка ни действовала, деформация
развиваться не будет. Таким образом, в результате упрочнения грунт в
определенных пределах приобретает свойства абсолютно твердого тела [147].
77
б)
σ
σ
2
4
3
1
0
t
ε
ε
0
г) σ
в)
σ
B
2‘
B
σI A
σI A
3‘
1‘
0
t
0
E
C
D C‘
ε
0
C
E
D
C‘
ε
Рисунок 2.12 – Зависимости между напряжением ζ
и относительной деформацией ε при циклическом нагружении
(по Н. Я. Хархуте)
На участке АВ деформация развивается со все возрастающей скоростью,
несмотря на это при больших скоростях изменения напряженного состояния
развитие деформации все же отстает от соответствующего изменения напряжения
и потому деформация продолжает развиваться и после того, как напряжение по
достижении максимума начинает уже снижаться. Этот процесс дальнейшего
развития деформации, который на циклических диаграммах отображается
кривыми ВС, можно назвать последействием нагружения [147].
Последействие
нагружения
наблюдается
при
деформировании
как
упрочненных, так и неупрочненных грунтов, если скорость изменения
напряженного состояния превосходит характерные для данного вида грунта
значения. Для связных грунтов последействие нагружения наблюдается при
скоростях изменения напряженного состояния, превышающих 0,01 МПа/с,
поэтому даже при таких небольших скоростях движения, какие характерны,
например, для катков при уплотнении грунтов (2-3 км/ч), уже около 50%
деформации развивается как деформация последействия нагружения [147].
78
При больших скоростях изменения напряженного состояния, как например,
при соударении штампа и грунта, диаграмма напряжение – деформация
принимает вид, изображаемый на рисунок 2.12, г. В этом случае деформация
достигает максимума в момент времени, когда нагрузка грунта оказывается почти
полностью снятой [147].
Восстановление обратимой части деформации всегда начинается с большим
запаздыванием – когда напряжение уже снизилось на какую-то определенную
величину, зависящую от скорости изменения напряженного состояния и степени
упрочнения грунта. Это запаздывание больше у связных, чем у несвязных
грунтов, оно уменьшается с ростом влажности грунта и с повышением его
напряженного состояния, запаздывание увеличивается в результате инерционных
явлений [147].
После того как восстановление обратимой части деформации началось, оно
идет с возрастающими скоростями (кривые CD на рисунке 2.12.) и продолжается
уже и после того, как грунт оказывается полностью разгруженным (отрезки
прямых DE). Эту последнюю часть обратимой деформации можно полностью
полагать деформацией обратного упругого последействия. Чем выше была
скорость изменения напряженного состояния, тем большая часть обратимой
деформации восстанавливается в процессе обратного упругого последействия
[147].
Отрезки осей абсцисс ОС / отображают полную деформацию, а отрезки ОЕ и
ЕС / соответственно необратимую и обратимую ее части. Площади диаграмм
ОАВСDО соответствуют затраченной на деформирование грунта работе.
Деформирование даже упрочненных грунтов связано с затратой значительной
работы, которая при этом рассеивается [147].
Если рассматривать не течение деформации, а ее результаты, т.е. итоговые
значения как полной деформации, так и обратимой и необратимой ее частей, то
применение данной зависимости между давлением на поверхности контакта
штампа с грунтом и деформацией грунтового полупространства оказывается
возможным в случае связных неупрочненных и малоупрочненных грунтов,
79
влажность которых находится в пределах (0,6-1,2) W0 , но при условии, что эти
напряжения не превосходят предела прочности грунта. Ввиду влияния на
деформацию скорости изменения напряженного состояния, и особенно когда она
более 2,5-3,5
МПа/с, применение линейной зависимости возможно, если
сравниваются результаты циклических нагрузок, совершаемых при одних и тех
же значениях скоростей, или когда скорости изменения напряженного состояния
выше указанного здесь предела [143, 147].
а)
Относительная
деформация
0,25
I
II
0,20
1
0,15
2
0,10
3
0,05
0 -3
2
-1
-2
3
10
10
1
10
10
10
10
Скорость изменения напряжённого состояния, (ˣ0,1) МПа/с
б)
1,6
Относительная
деформация
I II
1,4
1,2
4
1,0
5
0,8
0,6
6
0,4
-3
-1
2
-2
3
10
10
1
10
10
10
10
Скорость изменения напряжённого состояния, (ˣ0,1) МПа/с
I – зона работы катков; II – зона работы трамбующих машин; 1, 4–6 – полная
деформация; 2 – необратимая часть деформации; 3 – обратимая часть деформации;
сплошные линии – суглинистый грунт; пунктирные – песчаный грунт
Рисунок 2.13 – Зависимость относительной деформации грунта / d ш
от скорости изменения напряженного состояния при циклических
нагрузках (по Н. Я. Хархуте)
80
Повышение скорости изменения напряженного состояния приводит к
снижению как полной деформации, так и ее необратимой части (рисунок 2.12),
при этом особенно интенсивно деформация снижается в зоне небольших
абсолютных значений скоростей – до 0,1 МПа/с. Обратимая деформация
практически не изменяется и при очень большом повышении скорости, что
указывает на большую скорость ее течения в неупрочненных грунтах [147].
Чувствительность
грунтов
гранулометрического
состава.
к
влиянию
Наиболее
скорости
зависит
чувствительными
от
их
оказались
так
называемые оптимальные смеси, т.е. грунты, где соотношение между отдельными
фракциями обеспечивает получение максимальной плотности. Эти грунты
обычно содержат 10-12% глинистых частиц. Увеличение скорости изменения
напряженного состояния в 10 4 раз уменьшает деформацию этих грунтов в 3 раза.
Наименее чувствительными являются песчаные грунты, где такое же увеличение
скорости уменьшает деформацию в 1,2-1,4 раза. Связные грунты занимают
промежуточное положение (рисунок 2.12.) [147].
Уменьшение скорости изменения напряженного состояния при циклических
нагрузках эквивалентно соответствующему увеличению напряжения. Поэтому
грунты, будучи вполне уплотненными и упрочненными повторными нагрузками,
при снижении скорости деформирования вновь обнаруживают необратимую
деформацию [143, 147].
А это значит, что помимо контактных напряжений, для получения более
прочной структуры материала, необходимо уменьшить скорость деформирования,
увеличивать
время
приложения
нагрузки
(именно
этим
и
объясняется
возникновение эффекта необратимых деформаций при снижении скорости
деформирования).
Работа деформации может быть принята прямо пропорционально величине
деформации. С ростом скорости изменения напряженного состояния работа
несколько возрастает, однако этот рост существен только при малых значениях
скоростей.
81
Полная деформация, которая образуется в результате циклической нагрузки,
состоит из трех составляющих: обратимой части, величина которой определяется
модулем упругости Еу; необратимой части, которая развивается с высокими
скоростями и может быть найдена при помощи модуля необратимой деформации
Еп, и необратимой части статической деформации, развивающейся с малыми
скоростями Δхп. Эту часть можно назвать вязкой пластической деформацией и
определять при помощи параметров η 0 и χ . В случае упрочненных грунтов
некоторая часть обратимой деформации также протекает со сравнительно
небольшими
скоростями
и
поэтому
является
четвертой
составляющей
деформации [147].
σ
C
D
A
E
0
t3
t1
B
t
Рисунок 2.14 – Схема для определения
эквивалентного времени
При однократном нагружении неупрочненного грунта можно пренебречь
вязкой частью необратимой деформации, если скорости изменения напряженного
состояния при циклических нагрузках превышают 1,0 МПа/с. В этом случае
полную деформацию можно найти из формулы [147]
82
1
1
х
.
E
Е
п
у
(2.7)
Эта формула может быть использована во многих случаях, когда
рассматривается взаимодействие грунтовой поверхности с
колесами как
транспортных средств, так и машин для уплотнения грунтов.
При небольшой скорости изменения напряженного состояния необходимо
учитывать еще вязкую часть необратимой деформации. В этом случае расчет
полной деформации можно произвести хотя и недостаточно строгим, но зато
простым методом. Изменение напряжения во времени, существующее в
действительности при циклической нагрузке, может быть заменено таким
нагружением
грунта,
при
котором
напряжение
мгновенно
возрастает,
поддерживается некоторое время постоянным, а затем также мгновенно падает до
нуля. Время, в течение которого это напряжение поддерживается постоянным, т.е.
время текучести, должно быть эквивалентно времени повышения напряженного
состояния в рассматриваемом процессе [147].
Эквивалентное время t Э
может быть найдено из условия равенства
площадей. При этом предполагается, что площадь, заключенная между кривой
нагрузки, осью абсцисс и ординатой, соответствующей времени нагружения t1
(площадь ОАВО), должна быть равна площади, отображающей мгновенную
нагрузку (OCDE). Максимальные значения напряжений в обоих случаях
одинаковы. При таком условии эквивалентное время может быть определено как
t
1 1
tЭ
t dt ,
t1 0
(2.8)
где t1 - напряжение, соответствующее времени t 1 .
Значение величины полной деформации применительно к деформированию
неупрочненного связного грунта находится по формуле [135]:
t1
1
1
t1
х
t1
ln 1
t dt .
E
0
t1 0
у Еп
(2.9)
83
При линейном возрастании напряжения во времени, т.е., когда
d
постоянно,
dt
выражение примет вид:
1,25 1
1
х 0,8
ln 1 0,5 t1 .
E у Е пл 0
(2.10)
В результате опытов Н. Я. Хархуты, Иванова и др. [6, 7, 16, 38, 39]
установлено, что при деформировании грунтов циклической нагрузкой с
мгновенным нагружением и разгрузкой необратимая деформация в среднем на
20% выше, чем в случае, когда напряжение возрастает и снижается во времени по
линейному закону. Это расхождение учтено введением в формулу (2.11)
численных коэффициентов. Проф. Н. Я. Хархутой было экспериментально
доказано изложенное выше утверждение, что помимо контактных напряжений на
процесс деформации грунтов значительное влияние оказывает время приложения
уплотняющей силы.
Формулами (2.9) и (2.10) учитывается лишь деформация, которая развивается
в процессе нагружения грунта. Для определения полной деформации, которая
развивалась за весь цикл нагружения, состоящий из процессов нагрузки и
разгрузки, можно пользоваться формулой
1
х E у
ln 1 0,5 t1 .
0
(2.11)
Скорость деформирования материала существенным образом влияет на процесс уплотнения и если этот процесс осуществлять без учета времени приложения
нагрузки, изменяя только контактные напряжения, то материал не «успевает» набрать необходимую прочность. Это в свою очередь может привести к деформации
грунтовых насыпей под действием эксплуатационных нагрузок [143, 147].
84
2.2.3. Влажность грунтов
Влажность также является одним из основных факторов, влияющих на
интенсивность уплотнения грунтов. Пространственно вода и другие жидкости
находятся в грунтах благодаря наличию в них всевозможных пустот (трещин, пор,
каналов и др.). Абсолютно сплошных грунтов, не содержащих сколько-нибудь
малое количество пор, в природе не существует. Эти пустоты, как правило,
занимают вода или другие жидкости из-за своей высокой подвижности.
Установлено, что ниже уровня грунтовых вод до глубин около 4-5 км и более,
практически все пустоты горных пород (за исключением углеводородных
залежей) заполнены водными растворами, образующими в пределах литосферы
региональные неразрывные макроскопические системы гидросферы [147].
Количественное
содержание
жидкого
компонента
в
грунте
может
оцениваться различными показателями: объемной и весовой влажностью.
Объемная влажность ( Wп ), или объемное содержание жидкости, численно
равна отношению объема воды (жидкости) в грунте ( Vw ) к объему всего грунта
( Vtot ):
V
Wп w 100% .
Vtot
(2.12)
Эта величина измеряется в % или в долях единицы и может меняться от нуля
(для абсолютно сухого грунта) до 100% или 1 (для полностью насыщенного
грунта).
Весовая влажность (W), или весовое (массовое) содержание жидкости,
численно равна отношению массы воды (жидкости) в грунте ( m w ) к массе
твердой фазы грунта ( m sk ):
m
W w 100% .
msk
(2.13)
85
Эта величина также измеряется в % или долях единицы. Однако в отличие от
объемной влажности имеет лишь нижнее ограничение – 0% для абсолютно сухого
грунта. Объемная и весовая влажности связаны между собой соотношением:
Wn w W ,
(2.14)
где - плотность скелета грунта, г / см 3 .
Степень (коэффициент) влажности ( S г ) характеризует относительную долю
заполнения пор водой (жидкостью) в данному грунте. Ее величина численно
равна отношению объема воды или жидкости ( Vw ) к объему пор грунта ( Vп ):
Sг
Vw
.
Vп
(2.15)
Величина Sг измеряется в долях единицы или в % и может меняться от 0 (в
случае абсолютно сухого грунта) до 1 или 100% (при полном насыщении пор).
Грунты, уплотненные до стабильной плотности, при воздействии влаги не
меняют этой плотности, т.е. в данном случае осадка и набухание отсутствуют. Из
рисунка 2.15 следует, что во избежание осадок грунтов при водонасыщении их
плотности должны быть тем выше, чем больше действующая сила. Различия в
стабильных плотностях связных и несвязных грунтов объясняются более жестким
скелетом несвязных грунтов [147].
Опытами установлено, что максимальная влажность водонасыщения зависит
от внешних сил, уменьшаясь с их ростом, притом особенно интенсивно в области
сравнительно небольших значений сил. Эта влажность зависит от вида грунта,
снижаясь с увеличением его связности. За единицу приняты оптимальные
влажности грунтов [147].
Относительная влажность, как правило, близка к пределу пластичности,
отличаясь от него для разных видов грунтов на 2-3%.
W0/
W
,
W0
где W , W0 - влажность и оптимальная влажность грунта, %.
(2.16)
86
/max
1
0,95
2
0,90
0,85
0
0,1
0,2
σ, МПа
1 – связный грунт; 2 – несвязный грунт
Рисунок 2.15 – Зависимость постоянной плотности
от контактного напряжения (по Н. Я. Хархуте)
При рассмотрении трѐхфазной среды, уплотнение грунтов, т.е. сближение его
частиц и агрегатов, происходит за счет удаления только воздуха. Отжатие воды
практически отсутствует, оно становится возможным лишь при уплотнении песков вибрированием, т.е. в относительно редких случаях. В уплотненном грунте
какой-то объем всегда остается занятым защемленным воздухом, удалить который уже оказывается невозможно. Поэтому максимально допустимая влажность
грунта в процентах ( Wmax ) может быть определена по формуле [147]
Wmax
1 V
1
1
0
100 ,
(2.17)
где 1 - удельная плотность воды, г / см 3 ( 1 1г / см3 ); ρΔ - удельная плотность
частиц грунта, г / см 3 ; Vа - относительный объем защемленного воздуха; 0 - тре-
87
буемая нормами плотность грунта, определяемая как 0 к у max , где ку– коэффициент уплотнения; max - максимальная плотность.
Удельный вес минеральной части грунта находится в сравнительно узких
пределах, и определение его не вызывает затруднений. Поэтому задачу можно
считать решенной, если найти объем, занятый защемленным воздухом. Определять этот объем необходимо в грунтах, уплотненных при повышенной влажности
или подвергнутых водонасыщению с одновременным действием нагрузки. Именно при этих условиях формируется земляное полотно автомобильных дорог и в
тех случаях, когда возможно его подтопление [147].
На основании исследований проф. Н. Я. Хархуты установленно, что для уплотненных связных грунтов объем пор, занятый защемленным воздухом, составляет около 3%. В уплотненных несвязных грунтах воздухом занят больший объем, достигающий 6 - 6,5%. Эти значения и могут быть приняты при определении
по формуле (2.17) максимально допустимой влажности грунта [89, 134, 143, 147].
Таблица 2.14 составлена проф. Н. Я. Хархутой [147] на основе данных по 270
грунтам. Отклонение отдельных значений влажности от среднего значения по отдельным видам грунтов находится в пределах 3–10 %, т.е. является допустимым.
Всякое превышение влажности грунтов по сравнению с максимально допустимыми значениями повлечет за собой недоуплотнение, а следовательно, понижение устойчивости, и потому является недопустимым. Поэтому для того, чтобы
исключить возможные ошибки, в таблице приведены не средние величины, а значения, соответствующие нижней границе случайных отклонений.
Вначале вычисляли средние величины и общепринятым методом находили
среднее отклонение отдельных частных значений от этих величин. Табличные
значения представляют собой разность между вычисленными средними величинами и средними отклонениями (таблица 2.14).
88
Таблица 2.14 – Значения допустимой влажности для различных грунтов
Коэффициент уплотнения (укатка)
1,0-0,98
0,95
Максимально допустимая влажность в долях от оптимальных значений, определенных методом стандартного уплотнения
Грунты
Пески (крупнозернистые и
среднезернистые)
Мелкие и пылеватые пески
Легкие супеси
(в том числе пылеватые)
Тяжелые супеси, легкие суглинки
Тяжелые суглинки, пылеватые суглинки и глины
2,0
2,50
1,35
1,60
1,25
1,35
1,15
1,30
Превышение оптимальной
влажности не допускается
1,20
При изучении влияния влажностей грунтов на их устойчивость, с учетом воздействия погодно-климатических факторов, были найдены оптимальные значения
влажностей, соответствующие наибольшей устойчивости. Под оптимальной
влажностью понимается такая влажность грунта, при которой требуемая плотность достигается при минимальных затратах механической работы. Эта влажность зависит от той нагрузки, при которой производится уплотнение (рисунок
2.16).
Показатели
влияния
количества
глинистых
частиц
определялись
Н. Я. Хархутой и М. П. Костельовым [65, 147] для уплотнения грунтов одиночным ударом и при вибрировании.
Для одиночного удара
К 'u
1 2
,
1
(2.18)
где υ1 и υ2 – скорости прохождения ультразвуковой волны, измеренные соответственно до и после удара.
Для вибрации
Кu
Е 01 Е 02
,
Е 01
(2.19)
где Е01 и Е02 – модули деформации грунта, измеренные до вибрации и во время вибрации.
89
1,0
0,2
1
W=1,3W0
0,8
3
0,6
0,4
Показатель КU‘
Показатель КU
2
0,1
1W0
1,2W0
0,2
0
10
20
30
40
Количество глинистых частиц, %
1, 2 – при вибрации с частотой 50Гц; 3 – при одиночном ударе
Рисунок 2.16 – Влияние содержания в грунтах глинистых
частиц на их тиксотропное разупрочнение (по Н. Я. Хархуте)
Каждой степени уплотнения соответствует своя оптимальная влажность
грунта, которая может быть определена по общему объему пор с учетом некоторого количества защемленного в грунте воздуха. Содержание последнего зависит,
в частности, от гранулометрического состава грунта и от содержания глинистых
частиц (рисунок 2.16.). График относится к грунтам, уплотненным при оптимальной влажности до максимальной стандартной плотности.
Из рисунка 2.16 видно, что наибольшим тиксотропным превращениям подвержены супеси (содержание глинистых частиц 3–7% и влажность W =1,2 - 1,3
W0), при вибрировании сопротивляемость таких грунтов деформированию может
быть снижена на 60 % или даже на 90 %. [147]. Дальнейшее увеличение содержания глинистых частиц уменьшает склонность к тиксотропным превращениям, однако при их содержании около 26 % эта склонность снова возрастает [143, 147].
90
Оптимальная влажность зависит от объема пор и от предельно возможной
пептизации, т.е. от вида грунта. Очевидно, что на величину оптимальной влажности будеут влиять гранулометрический и минералогический составы грунтов, состав обменных катионов, а также наличие в грунтовой влаге и грунте солей и других примесей.
Очевидно, что не всякое повышение влажности облегчает процесс уплотнения. Повышение влагосодержания обычно эффективно лишь при увлажнениях
грунтов до такой степени, при которой вся вода еще находится в связанном состоянии.
Оптимальная влажность зависит от величины действующей нагрузки лишь
постольку, поскольку последнюю определяет требуемая плотность. В практике
уплотнения грунтов оптимальную влажность приходится отыскивать именно по
отношению к параметрам нагрузки. Для определения оптимальной влажности при
уплотнении грунтов катками с гладкими вальцами удобно пользоваться опытной
зависимостью (рисунок 2.16.), построенной по данным В. Льюиса [157]. Этот
график, будучи построен по результатам работ различных исследователей, показывает, что с известным приближением эта зависимость может быть принята линейной.
Исследователями [31, 43, 62, 132, 145, 147, 161] было установлено, что размеры контактов рабочих органов машин с уплотняемым грунтом, а также скорость
изменения напряженного состояния практически не оказывают влияния на оптимальную влажность. Так, при повышении диаметра штампа (dш), которым деформируют грунт при уплотнении, в 2 раза и снижении скорости изменения напряженного состояния в 22 раза весовая влажность соответственно увеличилась всего
на 0,2 и 0,4%. Повторность приложения нагрузки, также оказывает влияние на оптимальную влажность лишь постольку, поскольку от нее зависит получаемая в
итоге плотность грунта. Это является существенным фактором, позволяющим интенсифицировать процесс уплотнения.
Рассматривая влияние влажности грунтов на протекание процесса уплотнения можно сделать вывод, что при повышении влажности грунтов уменьшается
91
их внутреннее сопротивление деформированию. Это происходит за счѐт того, что
влага облегчает относительное «проскальзывание» частиц грунта относительно
друг друга и снижает коэффициент внутреннего трения при его уплотнении. Однако такая тенденция наблюдается до определѐнного момента влагонасыщения, т.
е. до состояния оптимальной влажности, при котором грунт меньше всего сопротивляется деформации. Дальнейшее повышение влажности снижает эффективность процесса уплотнения, жидкая фаза начинает в большей степени проявлять
свои «несжимаемые» свойства, увеличивается вязкая составляющая сопротивления деформированию. Дальнейшее увеличение влажности может привести к снижению пределов прочности и пластичности, что особенно характерно для связанных глинистых грунтов.
Таким образом, влажность грунтов оказывает существенное влияние на
снижение их сопротивления деформированию. Уплотнение грунтов необходимо
проводить не только при значении оптимальной влажности, но и определѐнной
частоте приложения внешней силы, при которой колебательное движение частиц
виброуплотняемого грунта вызывает тиксотропные эффекты, резко снижающие
сопротивляемость
грунта
уплотнению
даже
при
невысоких
контактных
напряжениях.
2.2.4. Количество проходов по одному следу
Необходимое число проходов катка является важнейшим параметром,
характеризующим
интенсивность
уплотнения.
Достаточно
отметить,
что
отклонение от него в ту или иную сторону способно вызвать недоуплотнение
грунта или обеспечить напрасные затраты энергии на непродуктивных проходы
катка.
Деформирование
грунта
вальцами
катка
описывается
диаграммой
―напряжение - деформация‖, представленной на рисунке 2.17 в обобщенном виде.
92
σ
σ ПР
С
B
Напряжение
σТ
εT
ε
ПР
ε
Деформация
Рисунок 2.17 – Диаграмма ―напряжение – относительная
деформация‖
На диаграмме (площадка В–С) прослеживается близкое к разрушению
состояние уплотняемого материала, которое энергетически выгодно использовать
для повышения эффективности уплотнения. Материал при этом достаточно легко
накапливает необратимые деформации и по состоянию приближается к пределу
возможной плотности [147].
По современным представлениям контактные напряжения катка должны
быть больше предела текучести т уплотняемого материала, не превосходя
одновременно значения его предела прочности пр . Для обеспечения процесса
уплотнения в рассматриваемом прочностном диапазоне одних контактных
93
напряжений недостаточно, вальцы должны обеспечивать соответствующую
деформацию:
т пр ,
(2.20)
где εт – деформация, соответствующая пределу текучести грунта; εпр –
деформация, соответствующая пределу прочности грунта.
Процесс
уплотнения
сопровождается
ростом
прочности
и
модуля
деформации Е уплотняемого материала. При этом слой свежеотсыпанного
рыхлого материала толщиной h 0 деформируется после каждого прохода катка на
определѐнную величину, достигает соответствующего ей значения плотности ρ и
толщины слоя в ―плотном теле‖ h пл .
Если общую деформацию принять в соответствии с условием (2.20), то
исходя из формулы для определения модуля деформации, можем записать с
учетом свойств уплотняемого материала:
х i
пр h i
Еi
.
(2.21)
Толщина слоя уложенного материала h0 уменьшится на величину Δх:
h h 0 х .
(2.22)
Вследствие накапливаемых деформаций изменяется объѐмный вес грунта,
накопление остаточных деформаций может быть оценено коэффициентом
уплотнения ку:
ку
.
ст
(2.23)
Из графика на рисунке 2.18, видно, как должны изменяться модуль
деформации и предел прочности грунта от коэффициента уплотнения к у при
действии на него рабочего органа катка.
Модуль деформации, предел прочности, МПа
94
E
σПР
Коэффициент уплотнения КУ
Рисунок 2.18 – Зависимость предела прочности
и модуля деформации от коэффициента
уплотнения материала [135]
Следует отметить, что рассмотренный случай полного соответствия
параметров катка прочностным и деформативным свойствам уплотняемого
материала в течение всего процесса уплотнения на практике невозможен.
Поскольку рыхлый материал в свежеотсыпанным слое h0 обладает низким
пределом прочности, а затем набирает плотность, контактные напряжения
создаваемые уплотнителем, не должны его превышать. При последующих
проходах, как уже было отмечено выше, плотность и прочность грунта
возрастают.
Для
осуществления
дальнейшей
деформации
εi
контактные
напряжения должны увеличиваться, т.е. возникает необходимость изменять
контактно-массовые параметры катков, причем в течение всего процесса
уплотнения такая необходимость может возникать несколько раз [147].
В реальных условиях к этому ближе всего катки, регулирующие контактные
напряжения вслед за ростом предела прочности материала. Как правило, это
катки на пневмошинах, у которых такое регулирование происходит за счет
сокращения площади пятна контакта.
95
Классическая же технология укатки предусматривает применение нескольких
типов катков, обеспечивающих постепенный рост контактных напряжений ζ.
Если
их
параметры
не
полностью
соответствуют
изменению
свойств
уплотняемого материала, то снижается производительность работ, требуется
корректировка расчета числа проходов.
Деформацию, создаваемую вальцом за одно воздействие, можно определить,
воспользовавшись зависимостью А. Ю. Ишлинского [61]:
Fст2
,
х
2
2 L2 пр
R
(2.24)
где Fст – сила тяжести вальца; L – ширина вальца; R – радиус вальца.
Учитывая толщину уплотняемого слоя h0 и достигнутый коэффициент
уплотнения ку из графика на рисунке 2.23, можно найти соответствующее этому
коэффициенту значение предела прочности материала. Производя расчет числа
проходов катка, необходимо учитывать число и расположение вальцов, их
размеры, схему движения (кольцевая или челночная) и развесовку по осям.
Вычисления показывают, что каток ДУ-47А с развесовкой по осям 30×70%
более эффективен при кольцевой схеме укатки, чем при челночной. Выигрыш
составляет 2-3 прохода [66, 67]. Очевидно, что для самоходных катков,
работающих преимущественно по челночной схеме, следует рекомендовать
равномерную развесовку, обеспечивающую равенство контактных напряжений
между вальцами. И наоборот, для прицепных катков, работающих в сцепке, более
выгодно постепенное нарастание веса. Как видим, для катков с вальцами,
идущими ―след в след‖, расчет довольно прост.
Несколько сложнее расчет числа проходов для двухосного трехвальцового
катка. Общая полоса уплотнения таких катков складывается из перекрывающихся
на 200-300 мм полос уплотнения трех их вальцов, имеющих к тому же разные
размеры и контактные напряжения. При одинаковой прочности материала это
может
привести
к
неравномерному
деформированию.
В
этом
случае
деформирование от переднего и задних вальцов приходится считать отдельно и
96
для определения коэффициента уплотнения брать ее среднее значение. Число
воздействий вальцов у такого катка равно числу его проходов.
Для вибрационных катков расчеты производятся по тем же зависимостям с
подстановкой соответствующих этому способу уплотнения значений предела
прочности и модуля деформации грунта. Подобный подход так же, как и
вышеперечисленные факторы, определяет интенсивность процесса уплотнения.
2.2.5. Толщина уплотняемого слоя
Оптимальная толщина уплотняемых слоев грунта определяется предельной
глубиной распространения напряжений от силового воздействия рабочих органов
катков. Известно, что предельная глубина действия нагрузки находится в пределах (3-3,5) d ш – диаметра штампа, которым деформируют грунт.
Грунты всегда уплотняют послойно. С повышением толщины уплотняемого
слоя деформации и напряжения начинают затухать [147], а это значит, что чрезмерно большие слои будут недоуплотняться в нижней части, что в свою очередь
не позволит обеспечить равномерную плотность и прочность таких насыпей. Поэтому в основании каждого слоя находится ранее уплотняемый более жесткий
грунт. Различие в жесткости грунтов слоя и основания особенно велико в начале
уплотнения, когда грунт находится в рыхлом состоянии. Более жесткое основание
расположено на меньшей глубине, чем предельная глубина, на которую распространяется еще действие нагрузок, и потому оно существенно влияет на распределение напряжений в грунте и на деформацию слоя грунта с учѐтом содержания
глинистых частиц (рисунок 2.19). Жесткое основание приводит к концентрации
сжимающих напряжений, а также к меньшему перепаду напряжений по глубине,
т.е. к их выравниванию [143, 147].
97
Оптимальная толщина слоя
2,0
1,6
1,2
1
2
3
0,8
.
0,4
0
2
4
6
8
10
Содержание глинистых частиц, %
1 2000Н / м 2 ; 2 1400Н / м 2 ; 740Н / м 2
Рисунок 2.19 – Зависимость оптимальной толщины слоя
от содержания в грунте глинистых частиц
(по Н. Я. Хархуте) [135]
Выравнивание напряжений является также и следствием пластических сдвигов, которые развиваются в отдельных точках объема грунта. Выравнивание, т.е.
уменьшение перепада напряжений с глубиной, особенно проявляется при какойто средней плотности грунта, когда абсолютная величина и количество сдвигов
еще значительны, но они более или менее равномерно распределены по объему
грунтов, а не сосредоточены в верхней части слоя, как это бывает в рыхлом грунте. Ввиду выравнивания кривая распределения напряжений по толщине слоя значительно отличается от классической кривой Буссинеска (рисунок 2.20) [147].
При близком расположении основания (рисунок 2.20, кривая 3) напряжения
настолько выравниваются, что у основания они практически близки к напряжениям, действующим на поверхности грунта. В данном случае минимальные значения напряжений соответствуют средним частям слоя, причем разрыв между этими
напряжениями и напряжениями на поверхности грунта незначителен.
98
σ
1
2
3
h
1 – при отсутствии жесткого основания; 2 – при расположении
жесткого основания на относительно большой глубине;
3 – при близком к поверхности расположении грунтового основания
Рисунок 2.20 – Распределение напряжений
по глубине h (по Н. Я. Хархуте)
Такое распределение напряжений наблюдается при значительных различиях
в жесткостях слоя грунта и основания и при условии, что грунт слоя уже несколько уплотнен. В конце уплотнения при одинаковой влажности грунта слоя и основания их жесткости выравниваются.
В основу расчета получаемой в итоге деформации, во всяком случае при первых проходах машин, когда различие в жесткостях слоя и основания еще не велико, проф. Н. Я. Хархутой [147] предложен эквивалентный модуль деформации Е э ,
имеющий промежуточное значение, т.е. Е ос Е э Е , где Е ос - модуль деформации
основания; Е - модуль деформации грунта уплотняемого слоя.
99
Значение эквивалентного модуля находится в зависимости от толщины уплотняемого слоя. Чем меньше толщина, тем ближе его значение к модулю деформации основания (рисунок 2.21). График получен опытным путем проф.
Н. Я.
Хархутой [143, 147], он может быть использован при практических расчетах.
1,0
0,8
3
3
E /E
ОС
0,6
0,4
2
0,2
1
0
1
2
3
h/dш
1 – совершенно рыхлый грунт; 2 – рыхлый грунт;
3 – почти плотный грунт
Рисунок 2.21 – Зависимость эквивалентного модуля Е э
от относительной толщины уплотняемого слоя связного
грунта оптимальной влажности (по Н. Я. Хархуте [135])
Проф. Н. Я. Хархутой установлено, что жесткое основание, с одной стороны,
выравнивает распределение напряжений по глубине, в чем сказывается его положительная сторона, а с другой стороны, ввиду повышения жесткости всей системы, оно способствует уменьшению деформации, что относится к отрицательным
сторонам воздействия этого основания. Для компенсации этого уменьшения, необходимо увеличивать контактные напряжения. Это вполне возможно, так как
100
более жесткое основание повышает не только жесткость системы, но и предел
прочности. Закономерность повышения предела прочности аналогична зависимости, изображенной на рисунке 2.21 [147].
При отсутствии жесткого основания, т.е. когда деформируется полупространство грунта, тоже имеется зона равномерного уплотнения. Однако в этом случае
ее глубина на 10-20% меньше. Наличие зоны равномерного уплотнения при грунтовом полупространстве объясняется повышением напряженного состояния грунта с ростом числа поверхностей приложения нагрузки. Этот процесс повышения
прекращается по достижении грунтом какого-то определенного состояния, которое соответствует величине нагрузки. Чем глубже расположен рассматриваемый
объем грунта, тем при большем числе повторений приложения нагрузки прекращается этот процесс повышения, поскольку с каждым повторным приложением
нагрузки напряжения передаются через уже уплотнѐнную верхнюю часть полупространства ещѐ недоуплотнѐнной нижней. В этом случае в полупространстве
происходит своеобразное выравнивание напряжений, которое, однако, отличается
от рассмотренного ранее случая формирования слоя грунта на жестком основании
тем, что одинаковые напряжения возникают не одновременно, а при разных циклах нагружения [143, 147].
Напряжения, необходимые для доведения какого-то объема грунта до определенной плотности, уменьшаются с увеличением глубины расположения этого
объема. Поэтому одинаковая плотность грунта вблизи поверхности достигается
при больших напряжениях, чем на какой-то глубине. Кроме предельной зоны, на
которую распространяется действие нагрузки, можно выделить еще такую зону, в
которой деформация при уплотнении грунтов распределяется более или менее
равномерно (рисунок 2.22). Эта зона называется активной, а ее глубина – глубиной активной зоны. В этой зоне реализуется 80, а иногда и 90% всей необратимой
деформации [147].
Глубина активной зоны зависит от размеров параметров контакта рабочих
органов машин с грунтом, от скорости изменения напряженного состояния и величины контактного напряжения (рисунок 2.22). Главным фактором является
101
диаметр отпечатка контакта (штампа), который и определяет максимальную глубину, в пределах которой при благоприятных обстоятельствах, т.е. при контактных напряжениях, близких к пределу прочности, и относительно небольших скоростях изменения напряженного состояния, может быть получено однородное уплотнение грунта. Для интенсивного протекания процесса уплотнения необходимо,
чтобы скорость деформирования должна быть такой, что за время действия нагрузки волна напряжений не только успела достигнуть этой глубины, но и создать
на ней высокий уровень НДС, поддерживаемый в течение времени, достаточного
для развития соответствующей этому напряжению деформации. При самых благоприятных условиях глубина активной зоны близка к 2dш [147].
а
h0 /hmax
1,0
б
h0 /hmax
0,8
1,2
0,6
1,0
0,4
0,8
0,2
0,6
0,4
0
0,2
0,4
0,6
0,8
σ / σпр
0,8
0,9
1,0
1,1
1,2
1,3
W/W0
Рисунок 2.22 – Зависимость глубины активной зоны h 0 от: а – величины контактного напряжения; б – относительной влажности грунта; h мах - глубина активной зоны, соответствующая пределу прочности грунта пр и его оптимальной
влажности W0 (по Н. Я. Хархуте)
После превышения предела прочности грунта активная зона по своим размерам не увеличивается, а лишь смещается вниз. При снижении контактного напряжения зона уменьшается (рисунок 2.22, а). Это становится заметным после того,
как контактное давление уменьшается более чем на 50% от предела прочности
грунта. Вместе с тем, любое снижение контактного напряжения из-за уменьшения
деформации грунта влечет за собой необходимость в увеличении числа повторе-
102
ний приложения нагрузки, т.е. приводит к уменьшению производительности [143,
147].
При прочих равных условиях глубина активной зоны в связных грунтах на
20-25% ниже, чем в несвязных. В тех случаях, когда контактные напряжения
строго соответствуют пределу прочности грунта, его влажность не оказывает
влияния на глубину активной зоны. Однако, если контактное давление постоянно
и выбрано по оптимальной влажности грунта, то с понижением этой влажности
активная зона уменьшается (рисунок 2.22, б), что является следствием увеличения
предела прочности из-за того, что выбранное давление, ввиду резкого уменьшения предела прочности, оказывается чрезмерно большим. Это способствует интенсивному пластическому течению грунта, которое нарушает механизм распространения деформаций и в конечном итоге уменьшает глубину активной зоны.
Поэтому зависимость глубины активной зоны от влажности характеризуется кривой, имеющей максимум [147].
Максимум в зависимости от выбранного контактного напряжения может соответствовать различным влажностям и, в частном случае (рисунок 2.22, б), он
может соответствовать оптимальной влажности грунта.
Расчет глубины активной зоны h 0 можно вести по следующей формуле (по
Н. Я. Хархуте [131, 135]):
где L min
0
W
пр
,
(2.25)
h 0 Lmin
1 e
W0
– минимальный поперечный размер (ширина) поверхности контакта ра-
бочего органа машин с уплотняемым грунтом; σ 0 и σ пр – соответственно контактное напряжение и соответствующий оптимальной влажности предел прочности; е – основание натуральных логарифмов; и – безразмерные постоянные.
Коэффициент зависит от скорости изменения напряженного состояния;
при укатке 1,7 2,0 , при трамбовании 1,1 . Показатель степени зависит
от вида грунта и для связных грунтов принимается =3, 7 [147].
103
Формула (2.25) может служить для практических расчетов при σ σпр и
W W0 . Когда влажность грунта менее оптимального значения и предел прочно-
сти пр соответствует этой пониженной влажности, следует полагать, что
W / W0 1 .
Толщину уплотняемых слоев измеряют в плотном теле, т.е. при таком состоянии грунта, когда его плотность соответствует требуемому значению. Оптимальная толщина уплотняемых слоев грунта, т.е. толщина, при которой требуемая
плотность грунта достигается при наименьшей затрате механической работы, а
производительность машины максимальна и определяется глубиной активной зоны.
Исследования, а также практика эксплуатации катков с гладкими вальцами,
на пневматических шинах и трамбующих машин показали, что, если требуемая
плотность не превышает 0,95ρmax , оптимальная толщина может быть принята
равной глубине активной зоны. Такая плотность достигается относительно легко
и не требует излишне большого числа проходов машин. Для вибрационного уплотнения особенно несвязанных материалов картина несколько отличается, здесь
необходимо учитывать вертикальную глубину распространения виброволн. Проф.
Д. Д. Баркан [11–14] предлагает оценивать оптимальную толщину виброуплотняемого слоя грунта по критическим значениям виброускорений, при которых
ещѐ происходит накопление необратимых деформаций. Значения оптимальной
толщины виброуплотняемого слоя, как правило, превышают значения при статической укатке, исключение составляет уплотнение связанных грунтов, обладающих высоким вязким сопротивлением деформированию.
В таблице 2.15 приведены расчетные параметры связанных грунтов оптимальной влажности, которые могут быть использованы для практических расчетов. Эти параметры соответствуют уплотнению грунтов в слоях оптимальной
толщины при скоростях изменения напряженного состояния, близких к тем, которые наблюдаются при укатке и трамбовании грунта.
104
Плотность связных грунтов mах , обычными машинами при толщине слоя,
равной глубине активной зоны, может быть достигнута только при оптимальной
влажности грунтов. При этом подразумевается предел, соответствующий оптимальной влажности и толщине слоя, равной глубине активной зоны или превышающей эту глубину. При этих условиях высокая плотность грунта может быть
достигнута только увеличением числа проходов. Многочисленные опыты показали, что для достижения относительной плотности, равной mах , требуется сделать
в 3 раза больше проходов, чем для получения плотности 0,95 mах . Таким образом, производительность машин снижается в 3 раза.
Таблица 2.15 – Значения расчѐтных параметров связанных грунтов
Характеристика состояния
грунта
/ mах
Модуль деформации Е , МПа
0,60-0,70
0,71-0,75
0,76-0,85
0,86-0,90
0,91-0,94
5-10
10-20
20-40
40-80
80-100
Расчетные параметры грунтов оптимальной влажности
Эквивалентный модуль
деформации
Е Э , МПа
30
50
65
85
120
Эквивалентный модуль
пластичности
E ПЭ , МПа
35
65
85
140
240
Кн.д.
0,20
0,30
0,40
0,55
0,70
Высокая плотность грунта может быть достигнута изменением толщины уплотняемого слоя меньше глубины активной зоны. При этом уменьшаются боковые перемещения части грунта и их агрегатов, т.е. начинают преобладать вертикальные смещения, что способствует получению высокой плотности грунта. Однако более близкое расположение жесткого основания повышает эквивалентный
модуль системы, вследствие чего относительная деформация грунта, выраженная
в долях от толщины слоя, увеличивается не пропорционально уменьшению, а несколько отстает от него. Вместе с тем, при уменьшении толщины слоя всѐ усиливающееся влияние жесткого основания является основной причиной непрерывного повышения предела прочности грунта, что и позволяет применять более тяжелые машины.
Теоретическим и опытным путем установлено, что для достижения плотности грунта (0,98-1) mах толщину уплотняемого слоя грунта целесообразно выби-
105
рать в 1,5-2 раза меньше глубины активной зоны [147]. Именно такая толщина в
данном случае и будет оптимальной. Необходимое число проходов при этом может быть уменьшено на 20-30% по сравнению с тем количеством, которое требуется для доведения грунта в слое толщиной, равной глубине активной зоны, до
плотности 0,95 mах .
Уменьшение толщины уплотняемого слоя грунта выгоднее увеличения числа
проходов, так как производительность катков по сравнению с тем случаем, когда
требуемая плотность равна 0,95 mах , снижается не в 3, а в 1,5 раза. Однако этот
метод не применим, когда толщина слоя мала, например, при укатке грунтов катками с гладкими жесткими вальцами. В этих случаях единственным способом
достижения высокой степени уплотнения является увеличение числа проходов.
Уменьшать толщину уплотняемых слоев, как это следует из формулы (2.25),
приходится и в случаях, когда грунты имеют влажность менее оптимальной. Однако уменьшения можно избежать, если для уплотнения применять машины с повышенными контактными напряжениями. К таким машинам относятся тяжелые
модели кулачковых и решетчатых катков. Максимальные значения плотностей,
достигаемые этими машинами, составляют (1,1-1,12) mах
–
при тяжелых суглин-
ках, в том числе и пылеватых, и (1,03-1,06) mах – при несвязанных и малосвязанных грунтах. Такие и близкие к ним высокие плотности грунта получаются при
W 0,8 0,85 W0 и контактных напряжениях, близких к пределам прочностей
грунтов, которые при этих влажностях превосходят пределы прочностей тех же
грунтов оптимальных влажностей в 5-7 раз [143, 147].
Соотношение между ростом предела прочности и модуля деформации при
изменении состояния грунта может служить критерием для определения возможности уплотнения этого грунта [143, 147]. Возможность уплотнения определяется
неравенством
/
пр
Е 0/
,
пр Е0
(2.26)
106
где σ пр и Е 0 - предел прочности и модуль деформации первоначального состоя/
ния грунта; σ пр
и Е0/ - предел прочности и модуль деформации измененного со-
стояния грунта.
Неравенством (2.26) определяется возможность уплотнения грунтов и в тех
случаях, когда в результате изменения их состояния пределы прочности и модули
деформации не повышаются, а снижаются.
Возможность получения высоких плотностей грунтов при уменьшении их
влажности обусловлена соблюдением неравенства (2.26), т.е. с уменьшением
влажности предел прочности растет быстрее, чем модуль деформации (рисунок
2.23).
10
8
σпр
σпр ,E0
6
4
E0
2
0
0,7
0,8
0,9
1,0
W/W0
Рисунок 2.23 – Изменение предела прочности пр
и модуля деформации Е 0 связных грунтов
в зависимости от их влажности (по Н. Я. Хархуте)
Более быстрый рост предела прочности позволяет увеличивать контактные
напряжения без разрушения грунта в несколько большей мере, чем это требуется
по увеличению сопротивляемости грунтов деформированию, что и дает возможность получить высокие плотности. Таким образом, уменьшение влажности грун-
107
та создает потенциальные возможности для получения высокой степени уплотнения, а развивающиеся на поверхности грунтов напряжения создают условия для
реализации этих потенциальных возможностей. В таблице 2.16 приведены полученные опытным путем [26, 147] предельные значения плотностей грунтов, которые могут быть достигнуты при уменьшении влажности, а также необходимые
для этого контактные напряжения. Здесь предполагается, что уплотняемый слой
грунта расположен на основании, которое состоит из такого же ранее уплотненного грунта. За единицу контактных напряжений принят соответствующий оптимальной влажности предел прочности σ пр . В таблице приведены максимальные
значения относительной влажности, выше которых плотность, указанная в таблице 2.16 уже не может быть достигнута.
Таблица 2.16 – Значения максимальной относительной влажности грунтов
Влажность
грунта
W / W0
1
0,95
0,85
Предельная
плотность
/ mах
1,00
1,04
1,09
Контактные напряжения
0 / пр
Для достижения предельной плотности
Для достижения
плотности
1,0
2,0
5,0
1,0
1,2
1,5
Влажность
грунта
W / W0
Предельно
достижимая
плотность
/ mах
mах
0,83
0,80
0,77
1,10
1,12
1,13
Контактные напряжения
0 / пр
Для достижения
предельной
плотности
Для достиж-я
плотности
5,5
7,0
7,5
1,6
1,8
1,9
mах
Толщина уплотняемого слоя оказывает существенное влияние на интенсивность процесса уплотнения грунтов. Для эффективного осуществления этого процесса необходимо учитывать глубину активной зоны проработки материала. Причѐм при необходимости достижения высоких значениях требуемой плотности
толщина слоя должна снижаться, при этом необходимо учитывать не только возрастающее влияние жѐсткого основания, но и возможное снижение производительности машины за счѐт уменьшения прорабатываемого объѐма грунта. Применение вибрации позволяет значительно увеличить толщину уплотняемых слоѐв
грунта, для связанных грунтов при этом необходимо увеличивать ещѐ и контакт-
108
ные напряжения. Равномерное распределение плотности при максимальной толщине уплотняемого слоя возможно при виброуплотнении грунтов с оптимальной
влажностью и с учѐтом ранее изложенных факторов (величины контактных напряжений, скорости деформирования), влияющих на интенсивность уплотнения.
Представленные результаты исследований по свойствам грунтов позволяют
провести аппроксимацию экспериментальных данных (таблицы 2.17 – 2.20), полученных такими учѐными, как Д. Д. Баркан, С. С. Вялов, Н. Я. Хархута и др. [11,
13, 42, 43, 63, 143, 147], получения функциональных зависимостей основных физико-механических свойств грунтов от влажности и плотности (коэффициента уплотнения ку).
Таблица 2.17 – Зависимости модулей деформации супесчаного грунта
от коэффициента уплотнения
Влажность
Зависимость
Достоверность
аппроксимации
R 2 0,959
W0
E 0,1711е
W0
Eп 0,0056е
9,4268ку
R 2 0,977
W0
E у 1,0943е
2,2543к у
R 2 0,932
3,4984к у
Таблица 2.18 – Зависимости модуля деформации суглинистого грунта
от коэффициента уплотнения
Влажность
Зависимость
W0
E 0,0003е
W0
Eп 0,0056е
R 2 0,989
W0
Eу 0,9894е
R 2 0,918
11,522ку
9,4268ку
3,3165к у
Достоверность аппроксимации
R 2 0,978
Таблица 2.19 – Зависимости предела прочности грунтов от влажности
Тип
Зависимость
Суглинок
пр 1,7044W08,7763
Достоверность
аппроксимации
R 2 0,998
Супесь
пр 0,8974W09,8578
R 2 0,977
109
Таблица 2.20 – Зависимости предела прочности грунтов от плотности (коэффициента уплотнения ку)
Тип
Зависимость
Суглинок
пр 1,6616к8,2245
у
Достоверность
аппроксимации
R 2 0,993
Супесь
пр 0,7405к6,0506
у
R 2 0,816
2.3. Выводы по главе
Многообразие свойств грунтов и факторов, влияющих на интенсивность протекания процесса уплотнения, расширяют возможности совершенствования уплотняющей техники. В то же время именно это многообразие усложняет процесс
уплотнения и приводит к необходимости применения комплексного подхода, который должен учитывать все возможности для адаптации уплотняющей техники к
изменяющимся в процессе обработки свойствам грунтов.
Теоретические положения взаимодействия уплотнителей с грунтами и эмпирические данные, полученные такими учѐными, как Э. А. Абраменков [1], В. А.
Анфимов [5], К. А. Артемьев [4], Д. Д. Баркан [11 – 14], В. Ф. Бабков [6 – 9], О. Т.
Батраков [15 – 23] В. А. Бидерман [29], А. К. Бируля [30 – 36], В. И. Гре-бенщиков
[45, 46], А. В. Захаренко [56, 57], В. И. Кнороз [64], А. А. Малышев [75], Н Н.
Иванов [59, 60], В. Б. Пермяков [84 – 88], В. Н. Сорокин [130], В. Н. Та-расов [132
–134], В. С. Щербаков [149, 150], Р. Хедекель [155] и др., позволяют сделать вывод, что для интенсификации процесса обработки грунтов необходимо в самом
широком диапазоне адаптировать параметры РО уплотнителей в зависимости от
свойств и состояния уплотняемых грунтов.
Основными факторами, влияющими на интенсивность процесса уплотнения,
являются:
1. Контактные напряжения. Интенсивное деформирование грунтов происходит при контактных напряжениях от РО, превышающих предел текучести и не
превышающих предел прочности уплотняемой среды. Максимальная интенсивность протекания этого процесса наблюдается при контактных напряжениях, мак-
110
симально близких к пределу прочности. Контактные напряжения должны постепенно повышаться, т.е. соответствовать изменению прочностных показателей уплотняемого грунта в течение всего процесса его деформирования.
2. Скорость деформирования. Интенсивность уплотнения грунтов не всегда
пропорциональна увеличению скорости их деформирования, особенно это характерно для связанных грунтов. Увеличение скорости деформирования вызывает
резкое увеличение вязкого сопротивления грунтов уплотнению, но если правильно регулировать время цикла приложения контактных напряжений, за которое
материал будет переводить (релаксировать) напряжѐнное состояние в максимально возможные остаточные деформации, то интенсивность процесса уплотнения
возрастет. Такой подход позволит интенсифицировать процесс уплотнения как
для несвязанных, так и для связанных грунтов.
3. Влажность грунтов. Уплотнения грунтов необходимо проводить не только
при значении оптимальной влажности, но и определѐнной частоте приложения
внешней силы, при которой колебательное движение частиц виброуплотняемого
грунта вызывает тиксотропные эффекты, резко снижающие сопротивляемость
грунта уплотнению даже при невысоких контактных напряжениях.
4. Количество проходов по одному следу. Необходимо стремиться к достижению требуемой плотности, которая оценивается коэффициентом уплотнения к у,
за минимальное количество проходов одним уплотняющим средством. Необходимое количество проходов следует снижать за счѐт увеличения площади контакта РО с уплотняемой средой. При этом правильно выбранное соотношение контактных напряжений и скорости деформирования среды позволит добиться повышения интенсивности процесса уплотнения.
5. Толщина уплотняемого слоя. Глубина проработки грунтового слоя должна
быть максимальной с учѐтом получения требуемого коэффициента уплотнения и
равномерности распределения напряжений по всей толщине слоя. Для интенсификации процесса уплотнения необходимо увеличивать глубину активной зоны.
Равномерное распределение плотности при максимальной толщине уплотняемого
слоя возможно при виброуплотнении грунтов с оптимальной влажностью и с учѐ-
111
том ранее изложенных факторов (величины контактных напряжений, скорости
деформирования) влияющих на интенсивность уплотнения.
Проведѐнный анализ позволяет сделать следующие выводы и определить основные направления исследований в области уплотнения грунтовых сред:
• наиболее интенсивно грунты уплотняются динамическими вибрационными
и трамбующими способами;
• интенсивность развития напряжѐнно-деформируемого состояния упруговязкопластичных уплотняемых грунтов в первую очередь зависит от величины,
времени действия и частоты приложения внешней силы при оптимальной влажности;
• время действия, частоту приложения и величину внешней силы необходимо
увеличивать до максимально возможных значений, напряжения от которых при
этом должны быть выше предела текучести и в то же время не должны превышать
предел прочности уплотняемого грунта;
• современные вибрационные катки адаптируют контактные напряжения, в
основном, за счѐт дискретного изменения величины внешней вынуждающей силы
в довольно узком диапазоне. Время приложения внешней силы регулируется изменением поступательной скорости их движения. Для увеличения времени действия внешней силы на уплотняемый грунт приходится снижать поступательную
скорость, т.е. снижать производительность катков. Необходимо в широком диапазоне адаптировать контактные напряжения, не снижая производительности вибрационных катков, при уплотнении грунтовых сред.
112
3. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПРОЦЕССА
ДИНАМИЧЕСКОГО ДЕФОРМИРОВАНИЯ УПЛОТНЯЕМОЙ СРЕДЫ
ВИБРАЦИОННЫМИ КАТКАМИ С ПНЕВМОШИННЫМИ РАБОЧИМИ
ОРГАНАМИ
3.1. Математическая модель элементарного упруговязкопластичного столба
грунтовой среды, деформируемой внешней периодической силой
Описание деформационных процессов, в том числе и процесса уплотнения
грунтовых сред, является достаточно сложной задачей, в которой изменение напряжений и деформаций в грунтах, вследствие приложения к ним внешних сил,
приводит к изменению их физико-механических свойств в течение процесса уплотнения. Решение данной задачи возможно с помощью замены реальных физико-механических свойств уплотняемой среды некоторыми реологическими моделями, отражающими еѐ наиболее существенные свойства при деформировании
(рисунок 3.1). Уплотняемый грунт в таком случае можно представить в виде элементарного столба упруговязкопластичной среды [10, 81, 136]:
(3.1)
el pl v (Fо sin t Fст )/S ,
где ζel – напряжения, обусловленные упругими деформациями, Па (реологическая
модель Гука); ζpl – напряжения, обусловленные пластическими деформациями, Па
(реологическая модель Сен-Венана); ζv – напряжения, обусловленные вязким сопротивлением деформированию, Па (реологическая модель Ньютона); F0 – амплитуда внешней периодической силы, Н; Fст=Мg – сила тяжести рабочего органа,
Н;ω – частота колебаний, с-1; S – площадь пятна контакта, м2..
х
,
(3.2)
h0
где Еу – модуль упругости среды, Па; h0 – начальная толщина среды, м; Δх – веel Е у
личина смещения среды относительно недеформированного состояния.
В качестве координат смещения среды можно выбирать текущее положение
сосредоточенной массы грунтовой среды, однако в нашем случае, более удобной
113
является величина смещения среды относительно недеформированного состояния
Δх=х–х0, где х0 – координата несмещѐнной сосредоточенной массы.
х
,
(3.3)
h0
где Θ – функция Хевисайда, (x) (signx 1) / 2 ; ζ – напряжения, возникающие в
pl ( т )
грунтовой среде от внешних сил, Па; ζт – напряжения предела текучести среды,
Па.
v
dx
,
dx
(3.4)
где η – вязкость среды, Нс/м2.
Реологическое уравнение движения уплотняемой грунтовой упруговязкопластичной среды (3.1) запишется в виде
Еу
х
х
dx
( т )
(Fо sin t Fст ) /S ,
h0
h0
dx
(3.5)
Для осуществления процесса виброуплотнения на данную среду должна действовать внешняя сила, которая приводит к созданию НДС среды и накоплению в
ней необратимых деформаций. Задача интенсификации процесса уплотнения упруговязкопластичной грунтовой среды требует принятия определѐнных допущений, которые без существенного изменения точности итоговых результатов позволяют проводить исследования процесса динамического деформирования среды
[81].
1. Среда – это элементарный столб сосредоточенной в материальной точке
массы, на которую наложены упругие и вязкие связи. Процесс виброуплотнения
сводится к одномерным колебаниям данной точки, при этом характер движения
рабочего органа, далее РО, известен. Показатели вязкости и жѐсткости среды постоянны в течение одного цикла движения РО. Параметры движения РО выбираются из условия максимального снижения вязкого сопротивления деформированию среды.
114
2. Помимо сил вязкого и упругого сопротивления на среду действуют силы
пластического сопротивления деформированию. Процесс виброуплотнения должен сводиться к созданию направленного движения рассматриваемой точки. Параметры движения РО должны обеспечивать максимальную скорость направленного движения точки сосредоточенной массы.
3. Рабочий орган – плоскость, совершающая гармонические колебания, допускающие представление в виде ряда Фурье. Движение среды описывается дифференциальными уравнениями, полученными из второго закона Ньютона.
4. Описание движения колебательной системы «рабочий орган - деформируемая среда» строится на основании формализма Лагранжа, диссипативная
функция основания на котором расположена уплотняемая среда, не учитывается.
5. Распределение деформаций и напряжений внутри среды учитывается еѐ
представлением в виде системы материальных точек с сосредоточенными массами, связанными между собой упруговязкопластичными связями линейного и нелинейного характера. Процесс виброуплотнения состоит в уменьшении вибрационной вязкости системы в целом и создании направленного движения центра масс
системы с максимальной скоростью.
Рассмотрим элементарный столб уплотняемой среды, определѐнного объѐма
и массы, на который действует внешняя периодическая сила F0sin(ωt) (рисунок
3.1.). Действие периодической вынуждающей силы вибровозбудителя с частотой
ω на деформируемую среду запишем в виде дифференциального уравнения движения массы среды [81, 116, 136]:
V
x b 2 x c 2 x Fо sin t Fст ,
(3.6)
где ∆x – деформация среды, м; m=ρV – приведенная масса среды, кг; ρ – плот3
3
ность деформируемой среды, кг/м ; V – объѐм деформируемого столба среды, м ;
Fст=Mg – сила тяжести РО, Н; с2– жѐсткость деформируемого столба среды, Н/м;
b2– коэффициент вязкого трения деформируемого объѐма, Нс/м.
b2
S
h0
(3.7)
115
где η – вязкость деформируемой среды, Нс/м2; h0–толщина уплотняемого слоя
2
среды, м; S –площадь пятна контакта, м .
c2
ES
,
h0
(3.8)
где Е – модуль деформации среды, Па;
Fд‘ (t)= F0 sin(t) +Fст
mS
∆x
c2el
h0
h1
с
c2pl
b2
х
Рисунок 3.1 – Схема деформирования элементарного
упруговязкопластичного деформируемого столба среды внешней
периодической силой
Поскольку модуль деформации среды характеризуется пластической и упругой деформациями [81, 147], то жѐсткость столба грунтовой среды также складывается из упругой и пластичной составляющих.
c 2el
E уS
h0
где Еу – модуль упругости грунтовой среды, МПа.
,
(3.9)
116
c 2pl
E пS
,
h0
(3.10)
где Еп – модуль пластичности грунтовой среды, МПа.
Преобразуем уравнение (3.6) с целью изучения поведения деформируемой
грунтовой среды при динамическом нагружении внешней периодической силой:
x
b2
c
F
F
x 2 x 0 sin t ст .
m
m
m
m
(3.11)
Для удобства вычислений запишем коэффициенты влияния
x kx 02x а 0 sin t а1 ,
(3.12)
где
k
b2
c
F
F
, 02 2 , а 0 0 , а1 ст .
m
m
m
m
(3.13)
Найдѐм решение уравнения 3.12:
x kx 02x 0 ,
r 2 kr 02 0 .
k k 2 40 k k k
r1,2
,
2
2
0
x 00 C1 C2 kt .
Далее
x r11 ASint BCost Dt
| 02 ;
x r11 ACost BSint D
| k;
x r11 A2Sint B2Cost.
A2Sint B2Cost kACost kBSint kD A02Sint
B02Cost 02Dt a 0Sint a1.
(3.14)
117
Sint
A kB 02 A a 0 ;
Cost
B2 kA 02B 0;
02 D a1 ,
t0
D
a1
.
02
Отсюда:
A(02 ) Bk a 0
.
2
Ak B(0 ) 0
x
A
B
r11
02
k
k
2
0
k
a0
02
0
02 a 0
k
0
(02 ) 2 k 22 ;
a 0 (02 ) 2 ;
a 0 k .
A
A
a (2 2 )
2 0 20 2
.
(0 ) k 22
(3.15)
B
B
a 0k
.
2
(0 2 )2 k 22
(3.16)
a 0 (02 2 )Sint
a 0tCost
a1
.
(02 2 ) 2 k 22 (02 2 ) 2 k 22 02
x C1 C2e
kt
a 0 (02 2 )
a 0 k
a
2
Sint 2
Cost 12 .
2 2
2 2
2 2
2 2
(0 ) k
(0 ) k
0
(3.17)
С учѐтом начальных условий:
x \ t 0 0
;
x\ t 0 0
x C2 ke
kt
a 0 (02 2 )Cost
a 0 k2Sint
2
, (3.18)
(02 2 ) 2 k 22
(0 2 ) 2 k 22
118
a 0 k
a1
C
C
0;
1
2
(02 2 )2 k 22 02
2
2
C k a 0 (0 ) 0.
2
(02 2 )2 k 22
a 0 (02 2 )
C2
0;
k (02 2 )2 k 22
a1
a 0k
a 0 (02 2 )
C1 2 2
.
0 (0 2 )2 k 22 k (02 2 )2 k 22
a1
a 0 k
a 0(02 2 )
a 0(02 2 )
x(t) 2 2
e kt
2 2
2 2
2
2 2
2 2
2
2 2
2 2
0 (0 ) k k (0 ) k k (0 ) k
(3.19)
2
2
a ( )
a 0 k
a
2 0 20 2
Sint 2
Cost 12 ;
2 2
2 2
2 2
(0 ) k
(0 ) k
0
Sin
Cos
a 0 (02 2 )
( ) k
2
0
2 2
2
2
k
(02 2 )2 k 22
;
.
a 0 k
a 0(02 2 )
a 0(02 2 )
x(t) 2
e kt
2 2
2 2
2
2 2
2 2
2
2 2
2 2
(0 ) k k (0 ) k k (0 ) k
(3.20)
a 0Sin(t )
;
(02 2 ) 2 k 2
tg
k
;
02 2
arctg(
k
).
2
2
0
(3.21)
Получим решение:
x(t)
a 0k
a 0 sin(t )
.
2 2
2 2
( ) k
(02 2 )2 k 2
2
0
(3.22)
Деформация системы на каждом цикле, в силу соотношения между жесткостью и вязкостью, в значительной степени зависит от величины внешней силы и
119
частоты еѐ приложения, поэтому рассматривается решение только для вынужденных колебаний.
Постоянная сила «статического пригруза» Fст, приводит к возникновению постоянного смещения (изменению точки отсчета), и ее влияние может быть учтено
выбором начальных условий.
Решение уравнения (3.3) не представляет сложности в случае неизменных
параметров b2 , c2 (ω02 , k) , но при меняющихся параметрах точное решение затруднительно. Поэтому решение определяется приближением, обеспечивающим достаточную точность расчѐтов, с учѐтом принятых допущений [116, 117]. Оценка
остаточных деформаций, обусловленных силами пластичного сопротивления,
производится следующим образом:
1. При деформации сжатия, когда выполняется условие т (t i ) (t i ) пр (t i ) ,
вынуждающая сила действует как против упругих, так и пластичных сил сопротивления среды, так что
2
01
(
c2el c2pl
c2el c2pl
(3.23)
)/m
и определяется модулем деформации (3.8), соотношение между пластическими и
упругими напряжениями можно выразить, используя уравнения (3.9, 3.10),
c2
c2el c2pl
c2el c2pl
.
(3.24)
2. На всем остальном периоде действует только упругая сила, так что
c
2
02
2el .
(3.25)
m
3. Очевидно, что остаточная деформация на одном периоде будет равна доле
неупругой деформации в амплитуде колебаний с учетом пластической силы:
x
a0
( ) k
2
0
2 2
2
.
(3.26)
4. Циклический процесс приводит к накоплению пластических деформаций:
уплотнению среды, так что суммарная деформация составит
120
n
x x i .
(3.27)
i 1
5. Учет зависимости параметров среды от деформации происходит на каждом
периоде, когда вязкость и жесткость пересчитываются для новых значений высоты деформируемого столба и его эффективной площади (с учетом угла внутреннего трения).
6. Суммарная работа на уплотнение считается законченной при достижении
граничных условий (заданного коэффициента уплотнения).
0
конеч
h 0 x
ку ,
h0
(3.28)
где ρ0 – начальная плотность деформируемой среды, кг/м3; ρконеч – конечная (нормативная) плотность среды, кг/м3.
Исходя из выражения для величины полной деформации (3.27) и учитывая
граничные условия процесса уплотнения среды (3.28), определим необходимое
количество циклов приложения нагрузки n для достижения граничных условий.
Число циклов n, необходимых для этого, с учѐтом работ Хархуты Н. Я., Калужского Я. А., Пермякова В. Б. и др., [62, 84, 147, 160] определяет время работы
t 2n / .
(3.29)
Соответствующая скорость уплотнителя, с учѐтом времени и частоты приложения внешней силы, для достижения необходимой плотности деформируемой
среды определится, как
d
,
t
(3.30)
где d – продольный параметр пятна контакта рабочего органа со средой, м.
В первом приближении d может быть найден, как
d=S/L,
(3.31)
где L – ширина рабочего органа, м.
Напряжения для каждого цикла, возникающие в деформируемой грунтовой
среде, определятся:
121
i
Fi c2i x i .
Si Si (x)
(3.32)
Площадь контакта можно выразить функцией от состояния обрабатываемой
среды и конструктивных особенностей уплотнителя S=f(ρ, c2, b2), тогда данная
модель с определѐнными допущениями может применяться к исследованиям
взаимодействия уплотняемой среды с пневмошинными рабочими органами.
В случае, когда наблюдается отрыв рабочего органа от поверхности уплотняемой среды, т. е. наблюдается процесс трамбования (рисунок 3. 2), согласно
принятым допущениям необходимо учитывать изменение начальных условий таким образом, что деформация среды в начальный момент времени Δх0=0, а вертикальная скорость движения трамбовки u0=u [112, 113, 117].
Fст
∆x
u
S
m
c2el
h0
h1
с
c2pl
b2
х
Рисунок 3.2 – Деформируемая упруговязкопластичная среда
при трамбовании
122
3.2. Математическая модель нескольких последовательно соединѐнных
элементарных упруговязкопластичных столбов грунтовой среды,
деформируемых внешней периодической силой
Поскольку в предложенном подходе рассматривается движение сосредоточенных масс, предыдущая модель позволяет рассматривать лишь среднее значение деформации центра масс рассматриваемого элементарного столба и соответственно средние по толщине слоя значения напряжений. Изучение изменения напряженного состояния среды на примере использования одного элементарного
столба не позволяет получить достаточно полной картины распределения напряжений и деформаций по всей толщине уплотняемого слоя. Поэтому уплотняемый
слой среды необходимо рассматривать в виде нескольких элементарных соединѐнных столбов [92, 121, 125, 126, 156] (рисунок 3. 3), которые последовательно
воспринимают нагрузку от внешней силы. В этом случае, используя предложенный в п. 3.1. модельный подход, необходимо получить аналогичное решение для
системы уравнений движения нескольких сосредоточенных масс. Минимальное
количество последовательно соединѐнных столбов должно быть не менее трѐх,
поскольку процесс изменения напряжений и деформаций в уплотняемом слое
протекает нелинейно.
x1 b2' (x 1 x 2 ) c2' (x1 x 2 ) b1 (x ро x 1 ) c1(x ро x1) F (t);
m1
x 2 b2'' (x 2 x 3 ) b2' (x 1 x 2 ) c2'' (x 2 x 3 ) c2' (x1 x 2 ) m 2g; (3.33)
m2
m
3 x 3 b2'''x 3 b2'' (x 2 x 3 ) c2'''x 3 c2'' (x 2 x 3 ) m3g,
где ∆xi – деформация соответствующего элементарного стержня среды, м; mi=ρiVi
– соответствующая приведенная масса стержня, кг; ρi – плотность соответствую3
щего элементарного стержня, кг/м ; Vi – объѐм соответствующего элементарного
3
2
стержня, м ; h0-толщина уплотняемого слоя среды, м; S-площадь контакта, м ; Е –
модуль деформации среды, Па; b2 – коэффициент вязкого трения деформируемого
столба среды, Нс/м; с2 – жѐсткость деформируемого столба среды, Н/м; η – вязкость деформируемой среды, Нс/м2; Fд(t) – внешняя периодическая сила, Н.
123
Fд(t)
∆ x1
S
c2'el
h1
c 2'pl
m1
с
b2'
∆x2
m2
c2'’el
h 0 h2
c 2'’pl
сb
2'’
∆ x3
m3
c 2'’’el
h3
c 2'’’pl
с
b2'’’
х
Рисунок 3.3 – Деформирование грунтовой среды внешней
периодической силой в виде нескольких элементарных столбов
Предложенная модель позволяет в полной мере оценить интенсивность протекания процесса накопления остаточных деформаций (процесса уплотнения), в
124
зависимости от величины и характера прилагаемой силы с учѐтом времени еѐ
приложения при известном значении функции S=f(ρ, c2, b2).
3. 3. Математическая модель взаимодействия нескольких последовательно
соединѐнных элементарных упруговязкопластичных столбов среды
с пневмошинным рабочим органом катка посредством внешней
периодической силы
С учѐтом того, что параметры внешней силы должны постоянно изменяться
[112, 113, 115], а время еѐ действия должно стремиться к максимальному значению, рабочие органы катков необходимо адаптировать в соответствии с этим условием. Решение данной задачи предполагается получить за счѐт деформирования
рабочего органа катка в процессе уплотнения (рисунок 3.4). На начальной стадии,
когда среда обладает невысокой прочностью, за счѐт деформации рабочего органа
необходимо увеличивать пятно контакта и время действия на среду. По мере увеличения сопротивления деформированию необходимо усиливать динамическую
составляющую силы, а для снижения диссипации энергии должна увеличиваться
жѐсткость рабочего органа [103, 104, 114, 119, 120, 122, 124, 152, 166].
Математическая модель, помимо изменения свойств среды в процессе уплотнения, должна учитывать деформацию РО, поэтому систему уравнений (3.33) необходимо записать с учѐтом уравнения, учитывающего деформацию рабочего органа.
x ро b1 (x ро x 1 ) c1 (x ро x1 ) F (t);
M
x1 b 2 ' (x 1 x 2 ) c 2 ' (x1 x 2 ) b1 (x ро x 1 ) c1 ( x ро x1 ) m1g; (3.34)
m1
x 2 b 2 '' (x 2 x 3 ) b 2 ' ( x 1 x 2 ) c 2 '' ( x 2 x 3 ) c 2 ' ( x1 x 2 ) m 2g;
m 2
m
3 x 3 b 2 '''x 3 b 2 '' (x 2 x 3 ) c 2 '''x 3 c 2 '' (x 2 x 3 ) m 3g,
где ∆xро – деформация рабочего органа, м; с1 – жѐсткость РО, Н/м; b1 - коэффициент вязкого трения РО, Нс/м; М – масса рабочего органа катка, кг; ∆xi – деформация соответствующего элементарного столба среды, м; mi=ρiVi – соответствующая приведенная масса соответствующего элементарного столба среды, кг; ρi –
125
3
плотность соответствующего элементарного столба, кг/м ; Vi – объѐм соответст3
вующего элементарного стержня, м ; h0-толщина уплотняемого слоя среды, м; S2
площадь пятна контакта, м ; c2i - жѐсткость соответствующего элементарного
столба среды, b 2 - коэффициент вязкого трения соответствующего элементарного
i
столба Нс/м; Fд(t) – внешняя периодическая сила, Н.
Рисунок 3.4 – Расчѐтная схема взаимодействия рабочего органа катка
с упруговязкопластичной средой
Для решения системы уравнений (3.34) составлена расчѐтная схема (рис. 3.4),
которая учитывает деформацию среды и деформацию рабочего органа катка с
учѐтом его линейных размеров. Площадь контакта РО со средой, и соответственно и еѐ деформируемый объем, зависит от величины деформации РО, который
126
принимается однородным упругим цилиндром шириной L и радиусом R, соприкасающимся с уплотняемой средой своей боковой поверхностью. В качестве уплотняемого объема выступает набор последовательных элементарных объѐмов
грунтовой среды определѐнной массы, верхнее основание которых имеет ширину
области
контакта
с
РО.
Внешняя
сила,
носит
гармонический
харак-
тер F (t) F0 sin(t) Fст . С учѐтом статического силы – Fст, смещение рабочего органа в свободном состоянии – x 0 .
В каждый момент времени как жесткость деформированной среды, так и жесткость рабочего органа зависят от деформации последнего. Коэффициент вязкого трения среды также зависит от величины пятна контакта и скорости его эволюции.
Решение задачи о движении деформируемого объема среды в рамках теории
линейных колебательных систем не представляется возможным [130, 154]. Параметры системы «рабочий орган - деформируемая среда» сложным образом зависят от деформаций и смещений, и даже численное решение уравнений движения
становится весьма затруднительным, а точное, если и возможным, то для очень
узкого круга частных случаев, и навряд ли представляющих практический интерес.
В рамках формализма Лагранжа решение задачи может производиться следующим образом. Полная функция Лагранжа системы «деформируемый объем
среды – деформируемый рабочий орган», с учетом действия вынуждающей силы,
диссипации и зависимости характеристик рабочего органа и среды от деформации
[136, 152] может быть записана:
127
M(x ро ) 2
m1 (x 1 ) 2 m 2 ( x 2 ) 2 m3 (x 3 ) 2
2
2
2
2
c1 (x ро )(x ро x1 ) 2 c 2' ( x ро , x1 )( x1 x 2 ) 2 c 2'' ( x ро , x 2 )( x 2 x 3 ) 2
2
2
2
c 2''' (x ро , x 3 )(x 3 ) 2
(x ро )F (t) m1gx1 m 2 gx 2 m3gx 3 ;
2
L(x ро , x1 , x 2 , x 3 , x ро , x 1 , x 2 , x 3 , t)
D(x ро , x, x ро , x)
b1 (x ро )(x ро x 1 ) 2
b 2'' (x ро , x 2 )(x 2 x 3 ) 2
2
b 2' (x ро , x1 )( x 1 x 2 ) 2
2
b 2''' ( x ро , x 3 )( x 3 ) 2
2
2
,
(3.35)
,
- диссипативная функция; x ро , x - величины деформации
где D(x ро , x, x ро , x)
грунта и рабочего органа, определяемые как смещения из состояния, соответствующего устойчивому равновесию системы, которое рассматривается как состояние с накопленной пластичной деформацией в результате уплотнения.
Здесь учтены вязкость и жѐсткость рабочего органа, которые зависят только
от его деформации, в то время как эти параметры для деформируемого объема
грунта зависят от деформации рабочего органа как функции величины пятна контакта. Уравнения движения Эйлера-Лагранжа в этом случае будут выглядеть следующим образом:
d L(x ро , x1 , x 2 , x 3 , x ро , x 1 , x 2 , x 3 , t)
x ро
dt
L(x ро , x1 , x 2 , x 3 , x ро , x 1 , x 2 , x 3 , t) D( x ро , x1 , x 2 , x 3 , x ро , x 1, x 2 , x 3 , t)
;
x1
x ро
(3.36)
d L(x ро , x1 , x 2 , x 3 , x ро , x 1 , x 2 , x 3 , t)
x 1
dt
L(x , x , x , x , t) D(x , x , x , x , x , x , x , x , t)
ро
1
2
3
ро
1
2
3
1
2
1
2
;
x 2
x 1
....
В частности получаем уравнение движения для уплотняемого объема среды:
c 2 ( x ро , x) x
m
x b 2 (x ро , x)x b 2 (x ро , x)(x ро x)
c1 (x ро , x)( x ро x)
c1 (x ро , x) ( x ро x) 2
2
b1 (x1 , x) (x ро x)
x
2
x
2
c 2 ( x ро , x) (x) 2
x
2
b 2 ( x ро , x) x 2
F (t).
x
2
(3.37)
128
Решение этих уравнений, являющихся нелинейными, затруднительно. Предполагая зависимости вязкости и жесткости от координат слабыми, по сравнению с
зависимостями координат от времени, в уравнении (3.37) пренебрегаем членами,
содержащими производные вязкости и жесткости по координатам и скоростям,
примем:
c1 (x ро , x) (x ро x) 2
x
2
2 c 2 ( x ро , x) (x) 2 b 2 ( x ро , x) x 2
b1 ( x ро , x) ( x ро x)
0.
x
2
x
2
x
2
Поскольку интерес представляет смещение рабочего органа, с учетом гармонического характера внешней силы, можно построить приближенную модель,
описывающую вынужденные колебания системы около положения равновесия,
аналогично процессам для недеформируемого рабочего органа с уравнением движения.
m
x b2 (x ро , x)x c2 (x ро , x)x F (t) .
(3.38)
Отличие от линейной системы состоит в сложной зависимости коэффициентов от координат. Рассматривается физически обоснованное приближенное описание процесса в рамках циклической модели для системы с переменными параметрами, примененной в п. 3.1 [116].
Уравнение динамики системы (3.34) может быть записано следующим образом:
F (t) F1 (t) F2 (t) ,
(3.39)
F1 – сила сопротивления деформации рабочего органа.
F1 (x ро ) E1L( 2Rx ро (x ро ) 2 (R x ро )arccos(
R x ро
R
)).
(3.40)
F2 – суммарная сила сопротивления деформации рабочего органа и сопротивления деформации грунтовой среды.
F2 (x ро , x)
E2L
L
(2 2Rx ро (x ро ) 2 h 0 tan )x
(2 2Rx ро ( x ро ) 2 h 0 tan ) x , (3.41)
h0
h0
где Е1 и Е2 – модули деформации соответственно рабочего органа и среды,
θ – угол внутреннего трения среды.
129
С учѐтом, что в течение всего процесса уплотнения жѐсткость рабочего органа должна всегда быть выше жѐсткости уплотняемой среды, условие для деформации среды и РО будет выглядеть так:
F
(x ро x) F1 (x ро ) F2 (x ро , x) .
x 0
(3.42)
Данное уравнение не можешь быть решено без наложения дополнительной
связи. Эта связь может быть получена из условия равновесия сил сопротивления
деформированию среды и РО в момент «остановки» системы. Но и это условие
является существенно нелинейным и его непосредственное использование также
затруднительно.
F1 (x ро ) E1L( 2
x ро
R
) x ро - сила сопротивления деформации рабочего ор-
гана.
F2 (x ро , x)
2L
- сила сопротивления де( 2Rx ро h 0 tan )(E 2 x x)
h
формации среды.
Условие равенства сил в момент «установившегося равновесия» системы будет иметь следующий вид:
E1L( 2
x ро
R
)x ро
2L
( 2Rx ро h 0 tan )E 2x .
h0
(3.43)
Наложим связь x f (x ро ) , что позволит решить уравнение (3.42), а затем
найти деформацию среды на одном цикле вибрации. Уравнение (3.42) при этом
выглядит так:
x ро
E
(
2
)
x
1
ро
x
x
E L
F
R
0. . (3.44)
2E1L( 2 1 ) x ро 1
( 2 ро ) x ро x ро
R
4E 2
R
x 0
(2 2Rx ро h 0 tan )E 2
Ненулевое решение этого уравнения и представляет собой деформацию рабочего органа в момент остановки, которое после подстановки в уравнение связи
(3.43) позволяет получить деформацию среды x . Учет изменения жесткости и
130
вязкости среды в зависимости от числа циклов виброуплотнения производится
стандартным образом [116, 126].
По аналогии с предыдущими исследованиями для каждого цикла вибрации
показатели вязкости и упругости постоянные, тогда xi xi (c2(i1) ,b2(i1) ) , то есть
деформация на последующем шаге есть функция от значений вязкости и упругости, принятых для предыдущего цикла, согласно зависимости (3.27).
Необходимая продолжительность процесса уплотнения определится из граничных условий для достижения необходимой плотности материала (3.28), согласно требованиям проектной и нормативной документации.
Таким образом, можем использовать выражения (3.29) и (3.30) для определения необходимого времени и поступательной скорости движения уплотнителя.
Для более детального изучения влияния жѐсткости рабочего органа уплотнителя на поведение уплотняемой среды необходимо рассмотреть напряжения, возникающие в деформируемом слое. Учитывая форму объема уплотняемой среды и
действуя в рамках принятых приближений, можно без труда получить выражение
для напряжений по толщине слоя:
F (x ро , x) (x)S .
И далее
F
(x ро x)
x 0
(х)
,
S(x)
(3.45)
где S(x) – площадь сечения уплотняемой области грунта в зависимости от глубины.
S(x) L(2 2Rx ро 2x tan ) .
(3.46)
Математическое моделирование процесса уплотнения упруговязкопластичной грунтовой среды пневмошинным рабочим органом вибрационного катка проводилось в программной среде Maple 11 (Приложение 1). Общая структура модели представлена на рисунке 3.5, блок-схема расчѐта представлена на рисунке 3.6.
Расчѐты позволяют определить интенсивность процесса деформирования среды и
131
рациональные режимы процесса уплотнения с учѐтом изменяемой жѐсткости РО.
Анализируя влияние жесткости рабочего органа на диапазон адаптации контактных напряжений, определим время, величину и частоту приложения внешней силы в зависимости от изменяющихся свойств деформируемой среды [112, 115, 116,
124].
Модель деформирования
элементарного столба грунтовой
среды внешней периодической силой
F0, f
S, d
Зависимости
между параметрами пятна контакта,
величиной и частотой внешней
силы, деформациями,
напряжениями и виброускорениями
S, d
Δx
Δx
Модель деформирования нескольких
последовательно соединѐнных
элементарных столбов грунтовой
среды внешней периодической силой
Зависимости
между деформациями,
напряжениями, виброускорениями и
глубиной деформируемого слоя
Зависимости между жѐсткостью
рабочего органа и параметрами
пятна контакта
hi, Δxi
c2
Δхро
Модель деформирования нескольких
последовательно соединѐнных
элементарных столбов грунтовой
среды внешней периодической силой
посредством деформируемого РО
Зависимости
между деформациями,
напряжениями, виброускорениями,
глубиной деформируемого слоя и
жѐсткостью РО
A, σ, n
Регулятор
величины внешней
силы и частоты еѐ
приложения
Регулятор
жѐсткости РО
Рисунок 3.5 – Блок-схема алгоритма расчѐта в соответствии с моделью
132
Начало
Ввод исходных данных:
Е1, Е2, L, R, η, φ, ρ0 , ρконеч
Расчёт деформации рабочего органа: Δхро
E1L( 2
x ро
R
) x ро
2L
( 2Rx ро h 0 tan )E 2 x
h0
Расчёт деформации грунтовой среды: Δх
x
E1 ( 2 ро )x ро
x ро
x1
E1L
F
R
0.
2E1L( 2
) x ро
( 2
) x ро
x ро
R
4E 2
R
x 0
(2 2Rx ро h 0 tan )E 2
Расчёт виброускорений в грунтовой среде:
A(x) х2 .
x i 1 x i
нет
и
А j1 A j.
да
Расчёт площади пятна контакта:
S(x) L(2 2R x ро 2 x tan )
Расчёт напряжений грунтовой среды:
F
(x ро x)
x 0
(х)
S(x)
Вывод:
Δх, А, σ
Конец
Рисунок 3.6 – Блок-схема алгоритма расчѐта в соответствии с моделью
133
Проф. Д. Д. Барканом было установлено, что критерием энергоэффективности процесса вибрационного уплотнения грунтов могут служить значения виброускорений в грунтах [13], что было подтверждено Н. Я. Хархутой [147],
М. П. Костельовым [65, 67]. Установлено, что амплитуда колебаний влияет на
эффективность виброуплотнения поскольку она пропорциональна значениям виброускорений. Изучением виброускорений в колебательных системах занимались
многие отечественные и зарубежные учѐные: Н. А. Азюков, Д. Д. Баркан,
В. И. Баловнев, И. И. Блехман, А. А. Борщевский, В. Г. Зедгенизов, П. А. Корчагин,
П.Ф. Овчинников, К. П. Севров, С. П. Тимошенко, В. С. Щербаков,
А. А. Яблонский, H. Amick, D. Pietzsch, Yoo, T-S. Selig и др. [3, 10 – 14, 28, 39, 41,
51 – 58, 66, 67, 69, 81, 82, 91, 95, 136, 149, 151, 156, 161 –164]. Было доказано, что
виброускорения являются не только критерием энергоэффективности процесса
уплотнения [55, 85, 166], но и показателем развития НДС виброуплотняемой среды [12, 13, 169].
А(х)= –Δxω2=f(ζ(x)),
(3.29)
Разработанная математическая модель позволяет провести всесторонние исследования деформирования упруговязкопластичной среды пневмошинными рабочими органами с изменяемой жѐсткостью, определить рациональный диапазон
жѐсткости РО, величину и частоту приложения внешней силы с учѐтом деформативных свойств уплотняемой среды.
3.4. Выводы по главе
1. Построена математическая модель грунтовой среды в виде элементарного
упруговязкопластичного столба, деформируемого внешней периодической силой,
позволяющая исследовать напряжѐнно-деформируемое состояние и тенденции
изменения виброускорений в уплотняемой среде.
2. Разработана расчѐтная схема взаимодействия пневмошинного рабочего органа катка с упруговязкопластичной средой в виде нескольких последовательно
соединѐнных элементарных упруговязкопластичных столбов, позволяющая про-
134
вести математическое моделирование процесса уплотнения грунтовой среды вибрационным катком с пневмошинным рабочим органом изменяемой жѐсткости.
3. Математическая модель взаимодействия нескольких последовательно соединѐнных элементарных упруговязкопластичных столбов среды с пневмошинным рабочим органом катка даѐт возможность провести полномасштабные теоретические исследования уплотнения грунтов вибрационным катком с пневмошинными рабочими органами. Анализ результатов математического моделирования
позволяет определить рациональный диапазон жѐсткости РО, величину внешней
периодической силы и частоту еѐ приложения, с учѐтом свойств среды и параметров уплотнителя.
4. Результаты реализации представленной математической модели являются
областью допустимого решения (ОДР) для задач по оптимизации параметров
вибрационных катков с пневмошинными рабочими органами при уплотнении
грунтовых сред.
135
4. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ
ПНЕВМОШИННЫХ РАБОЧИХ ОРГАНОВ ВИБРАЦИОННЫХ КАТКОВ
ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
4. 1. Общая методика проведения экспериментальных исследований
Процесс взаимодействия пневмошинных рабочих органов с упруговязкопластичными грунтовыми средами является сложным процессом, зависящим от
большого количества различных факторов, как со стороны грунтового массива,
так и со стороны РО катков. Для пневмошинных рабочих органов с изменяемым
диапазоном жѐсткости необходимо провести экспериментальные исследования
для установления зависимостей жѐсткости РО от его конструктивных особенностей и внутреннего давления в шинах. Следующим шагом должны стать исследования влияния ряда факторов, в том числе и жѐсткости РО, на эффективность
протекания процесса уплотнения.
В качестве показателей эффективности процесса виброуплотнения могут
служить значения виброускорений и коэффициент уплотнения грунтов, которые в
свою очередь зависят от влажности грунта, его гранулометрического состава,
толщины прорабатываемого слоя, режимов работы и конструктивных особенностей уплотнителя.
Предельная толщина уплотняемого слоя, прорабатываемая до требуемой степени уплотнения (предельная глубина активной зоны), определяется следующими
факторами (по О. Т. Батракову, Н. Я Хархуте, В. Б. Пермякову, Yoo T-S, Selig E.
T. и др. [19 –23, 84 –88, 143 –147, 156, 171, 172]):
- характером прикладываемой уплотняющей силы (статическая, вибрационная и ударная);
- размером площади пятна контакта, передающей силовое воздействие на уплотняемую грунтовую среду;
- соотношением т (t i )(t i )пр (t i ) (где ζт, ζпр - соответственно предел текучести и предел прочности при сжатии грунта i–плотности, Па; ζi – контактное
136
давление под рабочим органом, Па);
- количеством циклов силового воздействия (проходов катка).
В соответствии с решаемыми задачами при проведении экспериментальных
исследований обычно применяют два метода эксперимента: активный и пассивный [79, 80], а наличие многофакторного пространства требует планирования
экспериментальных исследований с учѐтом вышеназванных факторов.
4.1.1. Планирование эксперимента для определения показателей жѐсткости
и вязкости пневмошинных рабочих органов
Жѐсткость и коэффициент вязкого трения пневматических шин, заполненных
жидкостью (гидрошин), в наибольшей степени зависят от внутреннего давления
жидкости в шинах, поэтому данный эксперимент может рассматриваться как однофакторный.
Жѐсткость и коэффициент вязкого трения пневматических шин с металлическими бандажами зависят не только от внутреннего давления воздуха в шинах, но
и от количества съѐмных бандажей, т. е. имеет место двухфакторный эксперимент.
Выбор критерия. Критерий (Y): Значения жѐсткости пневмошинного рабочего органа.
Определение факторов.
Факторы:
1) X1 − внутреннее давление воздуха в шинах, МПа;
2) X2 − количество металлических бандажей, шт;
Определение интервалов изменения факторов
Область определения факторов устанавливается, согласно схеме полнофакторного эксперимента, и предусматривает одновременное варьирование всех
исследуемых факторов на двух уровнях: верхнем (Max), имеющем максимальное
значение рассматриваемого фактора, и нижнем (Min), соответствующем мини-
137
мальному значению фактора. Интервалы изменения факторов в эксперименте
представлены в таблице 4.1.
Таблица 4.1 – Интервалы варьирования факторов в двухфакторном эксперименте
Уровни
Факторы
X1
X2
Min (-1)
0,2 МПа.
2 шт.
Max (+1)
0,6 МПа.
12 шт.
Построение плана проведения эксперимента
При известном значении числа факторов, можно найти число опытов, необходимых для реализации всех возможных сочетаний уровней факторов.
Nэ 2ф ,
(4.1)
где N э − количество экспериментов, ф− число факторов эксперимента.
Подставив значение числа факторов, вычислим количество экспериментов по
формуле (4.1):
N э 22 4 .
План эксперимента удобно задавать таблицей, называемой матрицей планирования эксперимента, включающей в себя значения факторов и эффектов их
взаимодействий. Матрица планирования полнофакторного эксперимента типа 2 2
и результаты опытов представлены в таблице 4.2. В таблице и в дальнейшем применяем сокращенное обозначение уровней факторов: вместо +1 и −1 обозначаем +
и −.
Таблица 4.2 – Матрица планирования двухфакторного эксперимента
Номер опыта, Nk
1
2
3
4
Порядок варьирования факторов
x1
x2
x1x2
+
+
+
−
+
−
+
−
−
−
−
+
138
Построен полный факторный эксперимент 2 2 , который имеет четыре опыта и
включает все возможные комбинации уровней двух факторов.
4.1.2. Планирование эксперимента для определения степени влияния жѐсткости рабочего органа на интенсивность процесса уплотнения
Выбор критерия. Критерий (Y): Значения виброускорений в уплотняемом
грунтовом слое.
Определение факторов.
1) X1 −влажность грунта, %W0;
2) X2 − частота колебаний вибровозбудителя, Гц;
3) X3 − жѐсткость рабочего органа, кН/м.
Определение интервалов изменения факторов
Многофакторный эксперимент запланирован для исследования процесса уплотнения грунтовых сред вибрационным пневмошинным катком. Область определения факторов, как и в предыдущем эксперименте, предусматривает одновременное варьирование всех исследуемых факторов на двух уровнях: верхнем
(Max), имеющем максимальное значение рассматриваемого фактора, и нижнем
(Min), соответствующем минимальному значению фактора. Интервалы изменения
факторов в эксперименте представлены в таблице 4.3. В качестве функции отклика на воздействие факторов, определяющих характер протекания исследуемого
процесса, выбраны значения виброускорений в грунте.
Таблица 4.3 – Интервалы варьирования факторов в трѐхфакторном эксперименте
Уровни
Факторы
X1
X2
X3
Min (-1)
0,90W0
24 Гц
1000 кН/м
Построение плана трѐхфакторного эксперимента
Вычислим количество экспериментов по формуле (4.1):
Max (+1)
W0
44 Гц
6000 кН/м
139
N э 23 8 .
Матрица планирования трѐхфакторного эксперимента типа 23 . В таблице
применяем сокращенное обозначение уровней факторов: вместо +1 и −1 обозначаем + и −.
Таблица 4.4 – Матрица планирования трѐхфакторного эксперимента
Номер опыта,
Nk
1
2
3
4
5
6
7
8
x1
+
−
+
−
+
−
+
−
Порядок варьирования факторов
x2
x3
x1x2
x1x3
+
+
+
+
+
+
−
−
−
+
−
+
−
+
+
−
+
−
+
−
+
−
−
+
−
−
−
−
−
−
+
+
x2x3
+
+
−
−
−
−
+
+
Построен полный факторный эксперимент 2 3 , который имеет восемь опытов
и включает все возможные комбинации уровней трех факторов.
4.1.3 Методика обработки экспериментальных данных
Независимо от метода испытаний важным условием их проведения является
обеспечение достоверности экспериментальной информации с требуемой доверительной вероятностью. В прикладных исследованиях считается достаточной доверительная вероятность (1-э)=0.95, э - коэффициент значимости [48, 79].
При проведении экспериментальных исследований возникает целый ряд факторов, приводящих к погрешностям результатов измерений.
Точность результатов исследования обеспечивалась количеством повторных
измерений. Полагая, что распределение величин, измеряемых в ходе выполнения
экспериментов подчиняются нормальному закону, число повторных измерений
определялось по формуле [79, 80]
nи
z2 2
,
2
(4.2)
140
где z квантиль нормального распределения; коэффициент вариации величины, для которой определяется количество повторных измерений; допустимая
погрешность в определении искомой величины.
На основании предварительных экспериментов значение коэффициентов вариации при определении плотности не превышает 0,15. При допустимой погрешности эксперимента 0,10 и доверительной вероятности 0,95, квантиль нормального распределения равен 1,82. Тогда необходимое число измерений составит
1,822 0,152
nи
7,4.
0,142
Таким образом, для достижения точности результатов эксперимента в пределах 10 %, необходимо выполнить 8 повторных наблюдений.
Для исключения из экспериментальных данных грубых ошибок использовался критерий Стьюдента [80].
y1 yc
t Т t T f , n и 1 ,
кв
(4.3)
где у1 - результат опыта, поставленный под сомнение; ус - среднее арифметическое значение результатов эксперимента; кв – среднеквадратичное отклонение;
t Tf – табличное значение критерия Стьюдента при доверительной вероятности
(1 -э) и числе степеней свободы ; nи – число повторных измерений.
Оценка среднеквадратичного отклонения определяется по формуле [80]:
y y
nи
кв
i 1
c 2
i
nи 1
.
(4.4)
Полученный результат выбраковывался, если вычисленное значение t было
меньше табличного при определѐнном уровне значимости.
В таблице 4. 5 приведены данные обработки результатов экспериментальных
исследований и погрешности основных приборов.
Таблица 4.5 – Результаты обработки экспериментальных данных и приборные погрешности
141
№ опыта/
параметр
1 (х)
2 (х)
3 (А)
Среднее Средняя
арифм. квадратичная
ошибка
8,6 мм
0,013
4,9 мм
0,011
2,5 м/с2 0,041
Доверит.
интервал,
α
0,95
0,95
0,95
Абсолют.
погреш-ть
Прибор.
погрешн.
Прибор
0,01
0,01
0,031
0,01 мм
0,01 мм
0,05 м/с2
Megatron
Megatron
Экофизика
Обработка экспериментальных данных показала, что погрешность измерений, как правило, не превышает приборную погрешность и обеспечивает требуемую достоверность результатов измерений.
4. 2. Экспериментальные исследования показателей жѐсткости и вязкости
пневмошинных рабочих органов вибрационных катков
В соответствии с теоретическими положениями и предложенной гипотезой о
необходимости расширения диапазона жѐсткости пневмошинных рабочих органов, с целью повышения интенсивности процесса уплотнения грунтов вибрационными катками, встаѐт вопрос о количественном определении возможных границ диапазона жѐсткости пневматических шин.
Проведѐн ряд экспериментальных исследований для выявления зависимостей
и численных значений жѐсткости и вязкости пневмошинных рабочих органов
предложенных конструкций (приложение 2) [105, 112, 118, 119, 122, 124].
Необходимо определить следующие значения величин и зависимости:
- значения жѐсткости с1 и коэффициента вязкого трения b1 пневмошинных РО
от внутреннего давления и конструктивных особенностей;
- площадь пятна контакта S в зависимости от состояния грунта (этапа уплотнения) и жѐсткости пневмошинного РО.
Методика проведения исследований заключалась в следующем: к опытным
образцам РО прикладывался ударный импульс в виде сбрасываемого груза, действие которого приводило к деформации опытного вальца.
Первый этап. Рассматривалась работа, затрачиваемая на деформацию рабочего органа, которая равна работе упругих, инерционных и диссипативных сил (4.5).
142
Был принят ряд допущений: рассматривается неупругий удар, деформация
шины линейна, деформируемый рабочий орган это однородное тело, опорная поверхность - абсолютно твѐрдое тело.
mг u12 (mк mг ) u 22 c2 x ро
b1 u 2 x ро .
2
2
2
2
(4.5)
где с1 – жесткость РО, кН/м; mг – масса сбрасываемого груза, кг; mк – масса колеса, кг; u1 и u2 –скорости груза до удара и системы «груз-колесо» после удара, м/с;
Н0 -высота падения груза, м; Δхро – деформация рабочего органа, м.
Второй этап. Определялась жесткость с1 рабочего органа.
Потенциальная энергия груза U=mгgН0, после его освобождения она переходит в кинетическую энергию системы Ek mг u12 / 2 , которая после взаимодействия с рабочим органом станет Ek (mк mг ) u22 2 . Известная часть кинетической энергии сбрасываемого груза тратится на деформацию вальца. Вводя обозначения
mг /(mк mг ) ,
(4.6)
u1, 2 g H0 ,
(4.7)
`
u,2 =u1 ,
(4.8)
Жѐсткость будет равна
c1
mг (u1,2 u ,22 ) 2 b1 u 2 x ро
x ро 2
.
(4.9)
Третий этап. Коэффициент вязкого трения b1, определится с учѐтом затухания колебаний в вальце [136, 151]. По С. П. Тимошенко, А. А. Яблонскому и др.
[48, 97, 135, 151], коэффициент вязкого трения деформируемых шин характеризуется декрементом затухания колебаний:
b1
b
ро д 1 д ,
b кр
2 Jц
(4.10)
где δ – логарифмический декремент затухания колебаний, который учитывает
скорость демпфирования и вид колебаний; b1 – коэффициент вязкого трения,
143
Н·с/м; bкр – критический коэффициент вязкого трения, Н·с/м; 0 - частота свободных колебаний РО, рад/с; τ д - период колебаний, с.
х ро
Jц
x
ln miР.О ,
x mi 1
Р.О.
(4.11)
где Jц – число циклов колебаний, хmi Р.О. – амплитуды колебаний рабочего органа
за один период колебаний.
b1
2 Jц
.
д
(4.12)
С другой стороны, коэффициент вязкого трения b1 определяется как
b1
F1
,
изро
(4.13)
где Fд1 – сила, создаваемая грузом, Н; υизро – скорость деформации рабочего органа, м/с.
4.2.1 Исследования жѐсткости и коэффициента вязкого трения шины, заполненной жидкостью
Определение жѐсткости и коэффициента вязкого трения шины 8,25 R20
(240×508) КИ-63, заполненной жидкостью, производилось в соответствии с вышеизложенной методикой. Внешняя нагрузка создавалась приложением ударного
импульса от сбрасываемого груза массой 70 кг. Конструктивная схема установки
представлена на рисунке 4.1. Деформация гидрошины и амплитуд еѐ свободных
колебаний при динамическом воздействии замерялась с помощью потенциометрического датчика, результаты измерений обрабатывались на ЭВМ.
144
Рисунок 4.1 – Экспериментальная установка
для определения жѐсткости и коэффициента
вязкого трения гидрошины
Давление внутри шины создавалось при помощи гидравлического стенда
КИ 4815М – 03 ТУ 70.0001.075 - 79 (рисунок 4.2), при этом из камеры шины сначала насосом откачивали воздух, а затем камеру заполняли жидкостью (в нашем
случае антифризом) под соответствующим давлением.
Средние значения динамических характеристик гидрошины вычислялись в
соответствии с вышеизложенной методикой определения жѐсткости и коэффициента вязкости испытуемого образца по результатам опытов для каждой серии экспериментов [105, 112].
145
Рисунок 4.2 – Гидростенд КИ 4815М – 03
для заполнения шины жидкостью под давлением
Графическая интерпретация данных представлена на рисунках 4.3 и 4.4. и
таблицах 4.6, 4.7.
b1, Нс/м
3000
пневмошина
2500
гидрошина
2000
1500
1000
0,1
0,2
0,3
0,4
0,5
0,6
рw, МПа
Рисунок 4.3 – Зависимость изменения коэффициента
вязкого трения от внутреннего давления в шинах
146
с1, кН/м
3000
2500
2000
гидрошина
1500
1000
пневмошина
500
0
0,1
0,2
0,3
0,4
0,6 рw, МПа
0,5
Рисунок 4.4 – Зависимость изменения жѐсткости
от внутреннего давления жидкости в шинах
Таблица 4.6 – Значения коэффициента вязкого трения и жѐсткости гидрошины и пневмошины при различном внутреннем давлении
Гидрошина
Пневмошина
Давление, МПа
Коэфф-т
вязкости,
кНс/м
Жѐст-ть,
МН/м
0,2
0,3
0,4
0,5
0,6
0,7
0,2
0,3
0,4
0,5
0,6
0,7
2,5
2,45
2,43
1,9
2,05
1,19
3,00
2,8
2,75
2,35
2,05
1,6
0,6
1,1
1,49
1,9
2,4
2,55
0,25
0,45
0,5
0,6
0,75
0,76
Таблица 4.7 – Зависимости жѐсткости и коэффициента вязкого трения
от внутреннего давления в пневмо- и гидрошинах
Пневмошина
c1 1818,3ln(p w ) 3173, 4
b1 3750p w 675p w 2990
R2 , достоверность аппроксимации
0,985
0,992
Гидрошина
R2
c1 968,57p w 119,4
0,944
b1 4149p2w 1203,2pw 2437
0,975
147
Проведѐнные экспериментальные исследования позволили определить коэффициент вязкого трения и жѐсткость гидрошины при различном внутреннем давлении. Анализ полученных данных позволил установить, что реологические характеристики гидрошины значительно превосходят показатели пневматических
шин, с точки зрения эффективности передачи вибрации обрабатываемой среде.
Причем эта тенденция прослеживается во всѐм рабочем диапазоне внутренних
давлений в шинах. Наиболее рациональным является значение 0,6 МПа, при нѐм
жѐсткость гидрошины более чем в два раза превышает жесткость шин, заполненных воздухом, а коэффициент вязкости, характеризующий диссипацию энергии
вибровозбудителя находится, на минимальном уровне, к тому же 0,6 МПа – это
максимальное значение давления для общепромышленных шин, при котором выдерживается заявленный производителем ресурс [105, 112].
4.2.2. Исследования жѐсткости и коэффициента вязкого трения пневматической шины оборудованной сменными металлическими бандажами
Целью данных исследований является определение жѐсткости и коэффициента вязкого трения пневмошины, оборудованной съѐмными металлическими бандажами, выявление зависимостей этих показателей от количества устанавливаемых бандажей и внутреннего давления в шине. Конструкция шины с установленными бандажами представлена на рисунке 4.5.
Для выполнения исследований рекомендован [77] следующий состав регистрирующего оборудования:
1. Бортовой измерительный комплекс (БИК) с модульной системой измерения на базе крейт-контроллера и персонального компьютера (изготовитель ФГУП
«Научно-исследовательский тракторный институт НАТИ»), включающий следующие компоненты:
1.1 Персональный компьютер-ноутбук Rover Book Navigator В510 Pentium
4M - 2.2 GHz 512MB RAM с программным обеспечением БИК (рисунок 4.7, позиция 1).
148
1.2 Крейт L-Card (рисунок 4.7, позиция 2): шасси LTC-26; контроллер LC-014
(ЕРР); блоки питания LTC-PW (220 В), OP-PW (12 В); модуль АЦП LC-111DP
(универсальный до ±10В по 16/32 каналам); модуль АЦП LC-451 (8-канальный
частотомер до ±5 В).
2. Коробка коммутационная (рисунок 4.7, позиция 3) с двумя клеммными колодками DB-37F (разводка сигнальных кабелей и питания на датчики и модули
АЦП).
3. Блок питания потенциометрического датчика перемещений DC +9 В.
4. Кабель сигнальный (экранированная витая пара, коаксиальный).
5. Датчик перемещения потенциометрический Megatron RC35-750S для измерения смещения рабочего органа, оборудованного съемными бандажами, относительно реперной точки - 1 шт. (рисунок 4.7, позиция 5; рис. 4.6).
6. Измеритель шума и вибрации ВШВ-003-М2 (рисунок 4.7, позиция 4).
7. Преобразователь пьезоэлектрический виброизмерительный ДН-3-М1 (рисунок 4.7, позиция 6; рисунок 4.8).
8. Цифровые видео- и фотокамеры.
Рисунок 4.5 – Пневмошина с установленными съѐмными бандажами
Потенциометрический датчик линейных перемещений Megatron RC35-750S
для измерения деформации опытного рабочего органа представлен на рисунке 4.7,
позиция 5 и рисунке 4.6.
149
Рисунок 4.6 – Потенциометрический датчик Megatron RC35-750S
для измерения линейных перемещений
Измеряемая длина перемещений - от 0 до 750 мм с точностью < 0,01 мм. Во
время эксперимента использован источник опорного напряжения Uоп = 9 В , на
выходе датчика измерено напряжение Uвых=0...U o n , зависящее от перемещения
штока датчика относительно корпуса [77]. Перемещение l штока (в метрах) определяется из выражения
l
Uвых 0,750
.
Uоп
(4.14)
С помощью программного обеспечения БИК осуществляются управление
модулями АЦП, автоматизированный сбор, хранение и визуализация измеренных
данных деформации при динамическом воздействии на шины. Программно задан
следующий режим работы модулей: задействованы 2 канала АЦП LC-111DP, общая частота опроса датчиков 1000 Гц [77].
Для определения виброускорений, возникающих в опытном образце при приложении внешней нагрузки, использовался прибор ВШВ-003-М2 (класс точности
1), который использует принцип преобразования механических колебаний исследуемых объектов в пропорциональные им электрические сигналы. В качестве
преобразователей механических колебаний в электрические сигналы, пропорциональные ускорению колеблющегося объекта, используется пьезоэлектрический
виброизмерительный преобразователь ДН-3-М1 (погрешность измерений ± 10%)
150
(рисунок 4.10.). Экспериментальная установка представлена на рисунки 4.7, 4.8.
Измерение деформации проводилось от воздействия на шины падающего груза
массой 25 кг с высоты 1м.
Рисунок 4.7 – Фотографии экспериментальной
установки и еѐ элементов
Рисунок 4.8 – Фрагмент экспериментальной
установки
151
а)
б)
в)
Рисунок 4.9 – Графики вертикальных колебаний пневмошинного
рабочего органа с 12 бандажами при давлении в шине рw = 0,4 МПа
В процессе исследований изменялось количество устанавливаемых бандажей
и внутреннее давление в шине [114, 118, 124]. Результаты представлены в виде
графиков (рисунки 4.9, 4.10). Уменьшение колебаний от ударного импульса при
установке бандажей подчеркивает факт изменения коэффициентов жесткости и
вязкости пневматика.
152
а)
б)
в)
Рисунок 4.10 – Графики вертикальных колебаний пневмошинного
рабочего органа с 12 бандажами при давлении в шине рw = 0,6 МПа
В результате эксперимента и обработки данных проведена аппроксимация
(таблица 4.8) полученных значений и построены графические зависимости для
153
жѐсткости и коэффициента вязкого трения пневмошинного рабочего органа при
различном количестве бандажей и внутреннем давлении (рисунок 4.11) [118, 114].
с1 , кН/м
6000
N=12шт
5000
N=10шт
4000
N= 8 шт
3000
N= 6 шт
2000
N= 4 шт
1000
N= 2 шт
N= 0 шт
0
0,3
0,2
р w , МПа
0,5
0,4
b1 , Нс / м
3000
N= 0 шт
2500
N= 2 шт
2000
N= 4 шт
N= 6 шт
1500
N= 8 шт
1000
N=10шт
500
N=12шт
0
0,1
0,2
0,3
0,4
0,5
0,6
р w , МПа
Рисунок 4.11 – Графики зависимостей коэффициентов жесткости c1
и вязкости b1 от числа установленных бандажей N и давления в шине
154
Таблица 4.8 – Значения жесткости с1 (кН/м) и коэффициента вязкого трения
b1 (Нс/м) от давления воздуха в шинах и количества бандажей
Количество ус-
Давление в шине
Давление в шине
Давление в шине
тановленных
рw = 0,2 МПа
рw = 0,4 МПа
рw = 0,6 МПа
с1
b1
с1
b1
с1
b1
2
338
2950
510
2750
773
1910
4
412
2885
800
2705
1105
1725
6
470
2800
1400
2650
2100
1500
8
523
2715
2100
2580
3540
1235
10
578
2615
2824
2475
4780
920
12
600
2500
3340
2350
5400
540
бандажей
N, шт
Таблица 4.9 – Зависимости жѐсткости и коэффициента вязкого трения
от давления воздуха в шинах и количества бандажей
Количество
бандажей
N, шт
2
шин с бандажами от внутреннего давления
Величина достоверности аппроксимации
c1, кН/м
с1 193,11ln(p w ) 296,38
R² = 0,915
b1, Нс/м
b1 5573,7p w 2135,5p w 2747,5
R² = 0,982
c1, кН/м
c1 34,556p3w 421,43p2w 904,3pw 985,14
R² = 0,984
b1, Нс/м
b1 8667,7p2w 4058pw 2267,9
R² = 0,979
c1, кН/м
c1 39,861p3w 448,57p2w 400,14pw 434,29
R² = 0,998
b1, Нс/м
b1 15286p2w 6336,7pw 1833,2
R² = 0,995
6
12
Регрессионные зависимости реологических свойств
С целью сопоставления значений полученных для динамической жѐсткости
шин с бандажами, которая определялась при помощи ударного импульса, дополнительно проводились экспериментальные измерения жѐсткости пневмошин с
бандажами при их статическом нагружении (рисунок 4.12). Сила веса составляла
от 9810 Н до 19620 Н, измерялась деформация пневмошинного рабочего органа.
Для определения жѐсткости использовался классический метод Гука.
155
с1
Fст
x ро
(4.15)
Рисунок 4.12 – Установка для измерения жѐсткости при статическом
нагружении
Контрольные измерения жѐсткости проводились для значений внутреннего
давления 0,5 МПа и количестве дополнительных бандажей 2, 1 и 0 штук. Расхождение значений жѐсткости при сравнении данных полученных при динамическом
и статическом способе измерения не превысило 10%.
Результаты исследований, представленные на рисунке 4.11, позволяют сделать вывод, что предложенные технические решения значительно расширяют
диапазон регулирования упруговязких свойств РО катков по сравнению с классическими пневматическими шинами. Одновременное увеличение количества металлических бандажей и внутреннего давления (рисунок 4.11) значительно увеличивает жѐсткость до 6000 кН/м (очевидно, что это не предел) и одновременно
снижает коэффициент вязкого трения, характеризующий диссипативную составляющую РО до 100 Нм/с и ниже. Это значит, что такой РО способен эффективно
передавать вибрацию уплотняемой среде с минимальными потерями на диссипацию энергии вибровозбудителя, что является значительным фактором, влияющим
на интенсивность процесса виброуплотнения грунтов.
156
Анализ зависимостей (рисунок 4.11.) показывает, что значительное улучшение реологических свойств вальца (с точки зрения эффективного использования
вибрации) достигается при давлении в шинах не менее 0,4 МПа и количестве бандажей от 6 штук. Тенденция явного улучшения реологических характеристик
продолжается до значения количества бандажей 12 штук и максимально возможного давления в шине. Дальнейшее наращивание количества бандажей не является целесообразным. Сравнивая показатели жѐсткости и вязкости пневмошин, гидрошин и шин, оборудованных бандажами, можно сделать вывод, что пневматические шины, оборудованные съѐмными металлическими бандажами, обладают
наилучшими свойствами, а при давлении 0,6 МПа и 12 бандажах обеспечивают
максимальную жѐсткость при минимальных значениях диссипации энергии вибровозбудителя [112, 114].
Полученные данные (рисунки 4.3, 4.4, 4.11.) позволяют оценить влияние деформационных свойств рабочего органа (жѐсткости и коэффициента вязкого трения) на эффективность передачи виброколебаний уплотняемой среде. Количественным критерием здесь является добротность колебательной системы (рисунок
4.13), характеризующая потери энергии в рабочем органе виброкатка.
Q
4500
4000
3500
b1
3000
2500
2000
1500
1000
с1
500
0
0
1000000
0
500
2000000
1000
3000000
4000000
1500
5000000 c1, кH/м
2000
b1, Hм/с
Рисунок 4.12 – Зависимость добротности колебательной системы
от жѐсткости и коэффициента вязкого трения пневмошин
157
Q M c1 / b1
(4.16)
где М – масса рабочего органа, кг; с1 – жѐсткость, Н/м; b1 – коэффициент вязкого
трения, Нс/м.
Анализ зависимостей (рисунок 4.13) показывает, что резкое увеличение добротности колебаний наблюдается при значениях жѐсткости пневмошинных РО от
5000кН/м и снижении коэффициента вязкого трения ниже 500 Нм/с. После достижения этих значений темп нарастания добротности снижается. Сделан вывод,
что дальнейшее улучшение демпфирующих показателей в меньшей степени будет
влиять на снижение диссипации энергии виброколебаний в процессе уплотнения
грунтовых сред. При значениях жѐсткости пневмошинных РО свыше 6000 кН/м
эффективность процесса уплотнения становится сопоставима с уплотнением
грунтовых сред машинами с металлическими рабочими органами, у которых
практически отсутствует диссипация энергии на деформацию РО.
4.2.3. Исследования параметров пятна контакта пневмошинных рабочих органов с опорной поверхностью
Существенным фактором, влияющим на интенсивность протекания процесса
уплотнения, являются параметры пятна контакта РО и грунта –это площадь контакта S и продольная ось отпечатка d. От площади контакта в первую очередь зависят контактные напряжения и соответственно развиваемое в грунте НДС.
Исследованиями взаимодействия пневматических колес с деформируемой
поверхностью занимался целый ряд таких учѐных, как Я. С. Агейкин [2],
В. А. Анфимов [5], В. Ф. Бабков [6, 7], О. Т. Батраков [15 – 19], А. К. Бируля [30,
33, 34], В. А. Бидерман [29], В. И. Гребенщиков [45, 46], В. И. Кнороз [64],
Н. А. Ульянов [137], Р. Хедекель [165] и др. Для исследуемых РО необходимо
провести дополнительные экспериментальные исследования параметров пятна
контакта, поскольку расширение диапазона жѐсткости обуславливает отличные от
классических пневматических шин их деформативные свойства [113, 114, 115].
158
Был проведен ряд опытов для определения параметров пятна контакта гидрошины с суглинистым грунтом. В зависимости от времени приложения внешней
силы (количества проходов) и давления внутри шины 8,25 R20 (240×508) КИ-63
при рw=0,4 МПа, нагрузки на неѐ 250 кг, сделаны замеры малой и большой осей
эллипса отпечатка а и d (рисунок 4.16) соответственно, а площадь определилась
из выражения
S
a d
,
4
(4.17)
где a, d – поперечная и продольная оси эллипса отпечатка соответственно.
Средние значения определѐнных величин в соответствии с критерием Стьюдента были сведены в таблицы 4.10 – 4.12.
Таблица 4.10 – Параметры отпечатка контакта при давлении в гидрошине 0,2 МПа
Количество проходов n
0
1
2
3
4
Малая ось контакта a, м
0,200
0,195
0,190
0,180
0,180
Большая ось контакта d, м
0,260
0,230
0,210
0,200
0,190
Площадь отпечатка S, м2
0,042
0,035
0,031
0,028
0,026
Таблица 4.11 – Параметры отпечатка контакта при давлении в гидрошине 0,4 МПа
Количество проходов n
0
1
2
3
4
Малая ось контакта a, м
0,180
0,175
0,160
0,155
0,150
Большая ось контакта d, м
0,230
0,210
0,170
0,160
0,140
Площадь отпечатка S, м2
0,033
0,026
0,021
0,020
0,016
Таблица 4.12 – Параметры отпечатка контакта при давлении в гидрошине 0,6 МПа
Количество проходов n
0
1
2
3
4
Малая ось контакта a, м
0,180
0,170
0,160
0,150
0,150
Большая ось контакта d, м
0,220
0,210
0,165
0,160
0,130
Площадь отпечатка S, м2
0,031
0,028
0,021
0,019
0,016
Дополнительно определялись следующие параметры: отрезок большой оси
эллипса отпечатка d’, обозначающий кривую необратимой деформации грунта
159
под шиной и отрезок, определяющий остаточную деформацию шины при еѐ контакте с грунтом d’’, а также зависящие от этих отрезков углы сегментов продольного сечения шины 0 и 1, представленные на рисунке 4.14.
Был проведѐн ряд замеров величин d’ и d’’, а углы θ0 и θ1 определились как
0 arcsin(d / R) ;
(4.187)
1 arcsin(d / R) .
Полученные данные сведены в таблицы 4.13 – 4.15.
O
φ0 φ
1
R
A
B
d''
d'
a
C
d
Рисунок 4.14 – Схема параметров пятна контакта шины с грунтом
(4.19)
160
Таблица 4.13 – Зависимости параметров отпечатка пятна контакта
при давлении в гидрошине 0,2 МПа
Количество
проходов, n
а, м
d, м
d’, м
d’’, м
S, м2
Угол θ0, 0
Угол θ1, 0
0
1
2
3
4
0,200
0,260
0,260
0,000
0,042
30,000
0,000
0,195
0,230
0,180
0,050
0,035
20,500
5,580
0,190
0,210
0,150
0,060
0,031
16,900
6,700
0,180
0,200
0,105
0,095
0,028
11,700
8,300
0,180
0,190
0,085
0,085
0,026
9,500
9,500
Таблица 4.14 – Зависимости параметров отпечатка пятна контакта
при давлении в гидрошине 0,4 МПа
Количество проходов, n
а, м
d, м
d’, м
d’’, м
S, м2
Угол θ0, 0
Угол θ1, 0
0
0,180
0,230
0,230
0,000
0,033
27,600
0,000
1
0,175
0,210
0,170
0,040
0,026
19,800
4,460
2
0,160
0,170
0,125
0,045
0,021
14,000
5,000
3
0,155
0,16
0,10
0,06
0,020
11,800
6,700
4
0,150
0,140
0,070
0,070
0,016
7,800
7,800
Таблица 4.15 – Зависимости параметров отпечатка пятна контакта
при давлении в гидрошине 0,6 МПа
Количество проходов, n
а, м
d, м
d’, м
d’’, м
S, м2
Угол θ0, 0
Угол θ1, 0
0
0,180
0,220
0,220
0,000
0,031
25,300
0,000
1
0,170
0,210
0,170
0,040
0,028
18,300
4,460
2
0,160
0,165
0,120
0,045
0,021
12,500
5,000
3
0,150
0,160
0,090
0,050
0,019
9,700
5,600
4
0,150
0,130
0,065
0,065
0,016
7,200
7,200
По экспериментальным данным построен график зависимости углов 0 и 1
от числа проходов по одному следу (рисунок 4.15). По зависимостям на рисунке
4.16 можно определить, что угол 0, характеризующий необратимую деформацию
грунта, уменьшается до определѐнного значения, соответствующего окончанию
процесса деформирования грунта. Угол 1, характеризующий остаточную деформацию шины при еѐ взаимодействии с грунтом, растѐт по обратной от 0 зависи-
161
мости до момента окончания деформирования грунта и в этот момент сравнивается по своему значению с 1, т.е. d’=d’’, когда уплотняемый грунт достигает своей
максимальной плотности [112].
35
30
Параметр контакта
20
15
10
25
20
15
5
10
0
5
(0,2 МПа)
(0,4 МПа)
(0,6 МПа)
(0,2МПа)
(0,4 МПа)
(0,6 МПа)
0
1
2
3
4
Количество проходов
5
n
Рисунок 4.15 – График зависимости углов 0 и 1 от количества
проходов катка
С помощью аппроксимации экспериментальных данных получены регрессионные зависимости, характеризующие изменения значений величин d, a, 0, 1 в
зависимости от числа проходов катка по одному следу (таблица 4.16).
162
Таблица 4.16 – Зависимости изменения параметров контакта от количества
проходов катка
Давление в
Регрессионные зависимости изменения параметров
гидрошине,
контакта от количества проходов катка, n.
pw, МПа
Достоверность
аппроксимации,
R2
Параметр контакта d, м
0,2
d 0,3571n 2 3,84n 29,4
0,985
0,4
d 0,2143n 2 3,5857n 26,6
0,981
0,6
d n 2 2,3n 24,6
0,998
Параметр контакта, 0, 0
0,2
0 38,481e 0,2861n
0,983
0,4
0 36,8351e 0,3045n
0,988
0,6
0 34,001e 0,3148n
0,980
Параметр контакта, 1, 0
0,2
1 5,709 ln( n ) 0,5496
0,983
0,4
1 4,633 ln( n ) 0,3559
0,987
0,6
1 4,0989 ln( n ) 0,5273
0,982
d, м
0,24
0,22
pw=0,2 МПа
0,2
0,18
pw=0,4 МПа
0,16
pw=0,6 МПа
0,14
0,12
0
1
2
3
n
Рисунок 4.16 – Зависимость параметра контакта d от количества
проходов гидрошины по грунту
163
0,
0
35
0,2МПа
0 38, 481e 0 , 2861 n
30
0,4 МПа
0 36,8351e 0,3045n
Параметр контакта
25
20
15
10
0,6 МПа
5
0 34,001e 0,3148n
0
1
2
3
4
5
n
Количество проходов
Рисунок 4.17 – Зависимость параметра контакта θ0
от количества проходов гидрошины по грунту
1
0
12
0,4 МПа
1 4,633 ln( n ) 0,3559
10
0,6 МПа
Параметр контакта
8
1 4,0989 ln( n ) 0,5273
0,2 МПа
1 5,709 ln( n ) 0,5496
6
4
2
0
1
2
3
4
5
n
Количество проходов
Рисунок 4.18 – Зависимость параметра контакта θ1
от количества проходов гидрошины по грунту
164
Рисунок 4.19 – Измерения параметров отпечатка контакта
для экспериментального образца катка на суглинистом грунте
Площадь контакта шины с грунтом будет определяться как площадь эллипса
с большой и малой осями по формуле (4.19).
В случае специальных шин, имеющих прямоугольную форму площади контакта, равенство будет иметь вид
S a d.
(4.19)
Как показали исследования (рисунки 4.21 – 4.24), бандажи увеличивают жесткость в таких пределах, что пятно контакта изменяется от прилагаемой силы в
более широких пределах, по сравнению с серийными шинами. Было также отмечено, что при воздействии статической нагрузки на рабочий орган, оборудованный двенадцатью бандажами (при рw = 0,5 МПа), геометрическая форма пневматика изменилась незначительно, как иллюстрирует рисунок 4.19.
С целью сравнения диапазона регулирования параметров пятна контакта
пневмошинных РО с металлическими вальцами были проведены измерения этих
параметров для вибрационного катка ДУ-107 (рисунок 4.20).
165
Рисунок 4.20 – Определение параметров пятна контакта
катка ДУ-107
Таблица 4.17 – Грунт суглинок (число пластичности 7), влажность 0,9W0
№
1
Каток
Пневмошинный РО
рw =0,2 МПа
4
Пневмошинный РО
рw =0,5 МПа
3
ДУ-107
Проходы
1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
Плотность, г/см3
1,870
1,920
1,955
1,985
2,005
2,020
2,030
2,040
1,870
1,930
1,970
2,005
2,030
2,050
2,070
2,085
2,085
1,870
1,905
1,940
1,970
2,000
2,020
2,040
2,050
Дуга, см
32
28
25
23
21
21
20
20
30
27
24
22
21
20
19
18
18
20
15
12
11
10
9
9
8
166
Таблица 4.18 – Грунт суглинок (число пластичности 7), влажность 0,95W0
№
Каток
1 Пневмошинный РО
рw =0,2 МПа
2
Пневмошинный РО
рw =0,5 МПа
3
ДУ-107
Проходы
1
2
3
4
5
6
1
2
3
4
5
6
7
1
2
3
4
5
6
7
Плотность, г/см3
1,870
1,960
2,040
2,080
2,120
2,130
1,870
1,960
2,065
2,105
2,135
2,160
2,175
1,870
1,970
2,050
2,090
2,110
2,120
2,125
Дуга, см
28
26
24
22
21
19
28
25
22
20
19
18
18
16
12
11
10
9
8
8
Таблица 4.19 – Грунт супесь, влажность 0,9W0
№
1
Каток
Пневмошинный
РО
рw =0,2 МПа
2
Пневмошинный
РО
рw =0,5 МПа
3
ДУ-107
Проходы
1
2
3
4
5
6
7
8
1
2
3
4
5
6
1
2
3
4
5
6
7
8
Плотность, г/см3
1,45
1,5
1,56
1,60
1,62
1,64
1,645
1,65
1,45
1,53
1,60
1,64
1,65
1,655
1,45
1,51
1,56
1,59
1,62
1,63
1,64
1,645
Удары ДорНИИ
1
3
5
6
6
6
5
5
1
3
5
6
6
7
1
3
5
6
7
7
8
8
Дуга, см
32
28
25
23
21
21
20
20
30
27
24
22
20
18
20
15
12
11
10
10
9
9
167
Таблица 4.20 – Грунт супесь, влажность W0
№
1
Каток
Пневмошинный
РО
рw =0,2 МПа
2
Пневмошинный
РО
рw =0,5 МПа
3
ДУ-107
Проходы
1
2
3
4
5
6
7
1
2
3
4
5
6
1
2
3
4
5
6
7
Плотность, г/см3
1,45
1,60
1,63
1,66
1,67
1,675
1,68
1,62
1,66
1,68
1,69
1,695
1,7
1,45
1,51
1,56
1,59
1,62
1,64
1,647
Удары ДорНИИ
5
6
7
8
8
9
9
5
6
7
8
9
9
5
6
6
7
8
9
9
Дуга, см
27
26
24
22
20
19
19
26
23
22
20
18
18
16
12
10
9
8
7
7
d, м
0,30
0,25
Пневмошинный
рw=0,2 МПа
0,20
Пневмошинный рw=0,5 МПа
0,15
ДУ-107
0,10
0,05
1
2
3
4
5
6
7
n
Рисунок 4.21 – Зависимость параметра d от количества проходов n,
суглинок, влажность 0,9W0
168
d, м
0,30
0,25
Пневмошинный
рw=0,2 МПа
0,20
Пневмошинный рw=0,5 МПа
0,15
ДУ-107
0,10
0,05
1
2
3
4
n
5
Рисунок 4.22 – Зависимость параметра d от количества
проходов n, суглинок, влажность 0,95W0
d, м
0,35
0,30
Пневмошинный
0,25
рw=0,2 МПа
0,20
Пневмошинный рw=0,5 МПа
0,15
ДУ-107
0,10
0,05
1
2
3
4
5
6
n
Рисунок 4.23 – Зависимость параметра d от количества проходов n,
супесь, влажность 0,9W0
169
d, м
0,30
0,25
Пневмошинный
рw=0,2 МПа
0,20
Пневмошинный рw=0,5 МПа
0,15
ДУ-107
0,10
0,05
0
1
2
3
4
5
n
Рисунок 4.24 – Зависимость параметра d от количества проходов n,
супесь, влажность W0
По результатам экспериментальных данных получены регрессионные зависимости изменения параметров контакта от стадии уплотнения (количества проходов) и жѐсткости РО (таблица 4.21).
Таблица 4.21 – Зависимости параметров отпечатка контакта от количества
проходов катка при влажности близкой к оптимальной
Жестк-ть,
Регрессионные зависимости изменения параметра пятна контакта d
c1, кН/м
от количества проходов катка n
(pw, МПа)
600 (0,2)
Суглинок
d 0, 0015n 2 0, 029n 0,3093
4500 (0,5) d 0, 0032n 2 0, 0425n 0,32
6000 (0,6)
d 0, 0038n 2 0, 0416n 0,1941
R2
Супесь
R2
0,996
d 0, 0013n 2 0, 0263n 0,3004
0,998
0,998
d 0, 0026n 2 0, 035n 0, 2914
0,998
0,980
d 0, 0034n 2 0, 407n 0,1936
0,984
Результаты исследований, представленные на рисунках 4.21 - 4.24, позволяют, сделать вывод о возможности расширения диапазона адаптации контактных
напряжений и времени их приложения для пневмошинных РО. Жѐсткость должна
регулироваться в пределах от 600 кН/м до 6000 кН/м. Верхний предел жѐсткости
при этом позволяет эффективно использовать вибрационное уплотнение [112,
114].
170
Появляется возможность интенсифицировать процесс уплотнения грунтов
адаптацией параметров вибрационных пневмошинных катков по величине контактных напряжений и максимальному времени их приложения, за счѐт изменяемой жѐсткости рабочих органов с учѐтом массовых характеристик катков.
4.3. Выводы по главе
1. Созданы экспериментальные установки для исследования жѐсткости и
коэффициента вязкого трения пневмошинных рабочих органов катков. Изучены
значения деформаций рабочих органов при приложении внешнего динамического
импульса. Определены зависимости изменения жѐсткости и коэффициента вязкого трения от внутреннего давления и количества металлических бандажей (рисунки 4.3, 4.4, 4.11, таблицы 4.6, 4.7, 4.8, 4.9). Проведѐн их сравнительный анализ, с
точки зрения снижения диссипативных потерь энергии при уплотнении грунтов,
который показал, что увеличение жѐсткости с 1000 кН/м до 6000 кН/м позволяет
повысить энергоэффективность виброколебаний в 5 – 6 раз.
3. Выявлены зависимости изменения параметров отпечатка контакта от жѐсткости пневмошинных рабочих органов и состояния грунта на различных этапах
уплотнения. Построены графики зависимости (рисунки 4.21 - 4.24) и получены
уравнения регрессии, описывающие зависимости параметров пятна контакта РО с
грунтом от жѐсткости рабочего органа катка. Проведѐн сравнительный анализ,
который показал, что увеличение значений жѐсткости РО в 5 – 6 раз обеспечивает
уменьшение площади контакта в 2 – 3 раза.
4. Получены регрессионные зависимости жѐсткости и коэффициента вязкого трения от внутреннего давления и количества металлических бандажей, параметров отпечатка контакта от жѐсткости пневмошинных РО и этапа уплотнения
грунтов. Результаты экспериментальных исследований позволяют определить рациональные параметры и режимы виброуплотнения грунтовых сред.
171
5. ИССЛЕДОВАНИЯ ВЛИЯНИЯ ПНЕВМОШИННЫХ РАБОЧИХ ОРГАНОВ
КАТКОВ НА ИНТЕНСИВНОСТЬ ПРОЦЕССА ВИБРАЦИОННОГО
УПЛОТНЕНИЯ ГРУНТОВ
5.1. Анализ результатов теоретических исследований
Теоретические исследования процесса уплотнения грунтов подтвердили значительное влияние жѐсткости РО на НДС и интенсивность деформирования грунтов. Изменение жѐсткости РО позволяет адаптировать процесс уплотнения под
свойства уплотняемой среды не только по контактным напряжениям, но и по времени их приложения. В этом случае интенсивность процесса уплотнения существенно увеличивается [112, 126]. Для достижения максимального эффекта необходимо стремиться в течение всего процесса выдерживать условие (2.3), при этом
время ti зависит от параметров контакта, которые изменяются в силу деформации
РО и также зависят от жѐсткости РО катка. Параметры контакта при этом влияют
не только на время приложения нагрузки, но и на скорость движения катка, значение которой должно быть увязано с частотой приложения вынуждающей силы
вибровозбудителя. Здесь должно соблюдаться условие снижения вибровязкости
грунтов (по Д. Д. Баркану [11]), суть которого состоит в том, что к виброуплотняемой среде необходимо прикладывать не менее 6 колебательных импульсов за
один цикл. Исследования влияния жесткости пневмошинного рабочего органа на
интенсивность процесса уплотнения в упруговязкопластичном слое виброуплотняемой среды, на примере уплотнения легкого суглинистого грунта (рис. 5.1 –
5.8.), показали, что рациональная частота колебаний вибровозбудителя находится
в пределах 30 – 40 Гц, где верхний предел соответствует большей жѐсткости РО.
172
Δх
Δх
t
t
Рисунок 5.1 – Динамическое деформирование среды, F0=100 кН;
частота 30 и 40 Гц соответственно, жѐсткость 10000кН/м
Δх
Δх
t
t
Рисунок 5.2 – Динамическое деформирование среды, F0=50 кН;
частота 30 и 40 Гц соответственно, жѐсткость 10000кН/м
Δх
Δх
t
t
Рисунок 5.3 – Динамическое деформирование среды, F0=100 кН;
частота 30 и 40 Гц соответственно, жѐсткость 5000 кН/м
173
Δх
Δх
t
t
Рисунок 5.4 – Динамическое деформирование среды, F0=50 кН;
частота 30 и 40 Гц соответственно, жѐсткость 5000 кН/м
Δх
Δх
t
t
Рисунок 5.5 – Динамическое деформирование среды, F0=100 кН;
частота 30 и 40 Гц соответственно, жѐсткость 3000 кН/м
Δх
Δх
t
t
Рисунок 5.6 – Динамическое деформирование среды, F0=50 кН;
частота 30 и 40 Гц соответственно, жѐсткость 3000 кН/м
174
Δх
Δх
t
t
Рисунок 5.7 – Динамическое деформирование среды, F0=100 кН;
частота 30 и 40 Гц соответственно, жѐсткость РО 1000 кН/м
Δх
Δх
t
t
Рисунок 5.8 – Динамическое деформирование среды, F0=50 кН;
частота 30 и 40 Гц соответственно, жѐсткость РО 1000 кН/м
Представленные исследования подтверждают гипотезу о необходимости
расширения жѐсткости пневмошинных рабочих органов катка и вследствие этого
повышать интенсивность процесса уплотнения грунтовых сред. Помимо жѐсткости рабочего органа, как видно из проведѐнных исследований, существенное
влияние на процесс уплотнения оказывает величина вынуждающей силы и частота еѐ приложения. При выборе параметров уплотнителя необходимо определять
рациональные или даже оптимальные значения этих параметров, с учѐтом заданных свойств уплотняемого грунта.
175
Исследования выявили существенное отличие рационального диапазона значений жѐсткости РО для связанных и несвязанных грунтовых сред. На рисунке 5.9
представлены зависимости напряжений от глубины при различной жѐсткости рабочего органа.
σ, МПа
1,2
1,0
0,8
0,6
с1 =5000 кН/м
0,4
с1 =4000 кН/м
0,2
с1 =1000 кН/м
0
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
h, м
Рисунок 5.9 – Зависимость напряжений в суглинистом грунте от глубины
в грунтовом слое при различной жѐсткости рабочего органа
На рисунке 5.10 представлены зависимости изменения средних напряжений
от деформации в слое суглинистого грунта толщиной 0,4 м оптимальной влажности и числом пластичности 7. Начальный модуль деформации грунта Е2=30 МПа;
начальный коэффициент вязкого трения η=1005 Па·с; начальная плотность
ρ0=1870 кг/м3; радиус вальца R=0,6 м; ширина L=1 м; вынуждающая сила F0=85
кН; частота вибровозбудителя f=40 Гц (250 с-1).
На основании исследований, приведѐнных в главе 2, в процессе уплотнения
грунтов контактные напряжения не должны превышать их предел прочности. Для
плотного (ку≈1,0) суглинистого грунта предельные контактные напряжения соответствуют диапазону от 0,7 до 1,2 МПа, а средние, по толщине слоя напряжения,
от 0,3 до 0,6 МПа. Жесткость пневмошинного рабочего органа, обеспечивающая
данный диапазон напряжений (рисунок 5.9.), соответствует значениям от 4000 до
5000 кН/м.
176
σ,МПа
0,53
с1 = 5000 кН/м
0,51
с1 = 4800 кН/м
0,49
0,47
с1 = 4600 кН/м
0,45
0,43
0,41
с1 = 4300 кН/м
0,39
0,37
0,35
0
0, 01
0, 02
0, 03
0, 04
0, 05
0, 07 ∆ х , м
0, 06
Рисунок 5.10 – Зависимость средних напряжений суглинистого грунта
от деформации в грунтовом слое при различной жѐсткости рабочего органа
На рисунке 5.11 показано, что изменение жѐсткости РО в указанном выше
диапазоне позволяет добиться контактных напряжений у поверхности слоя
0,8 МПа с постепенным затуханием до глубины 0,4 м, что соответствует рациональной толщине уплотняемого слоя для связанного суглинистого грунта.
σ, МПа
0,9
0,8
с1 = 5000кН/м
0,7
0,6
с1 = 4800 кН/м
0,5
0,4
0,3
с1 =4600 кН/м
0,2
с1 = 4300кН/м
0,1
0
0,1
0,15
0,2
0,25
0,3
0,35
Рисунок 5.11 – Зависимость напряжений в суглинистом грунте
от глубины при различной жѐсткости рабочего органа
h, м
177
Рисунок 5.12 – Рациональная скорость уплотнения суглинистого
грунта на различных этапах уплотнения за один условный проход
Анализ влияния жѐсткости РО на скорость движения катка представлен на
рисунке 5.12. Здесь рассматривалось влияние жѐсткости на продольный параметр
контакта d с учѐтом времени, необходимого для достижения определѐнной плотности (коэффициента уплотнения), в соответствии с формулой (3.30).
Очевидно, что с повышением прочности материала его сопротивление деформированию возрастает и контактные напряжения необходимо увеличивать за
счѐт увеличения жѐсткости РО, но и время приложения силы также необходимо
увеличивать, что приводит к необходимости снижения скорости движения катка.
Скорость катка должна изменяться от 2,4 км/ч при уплотнении рыхлого грунта
(ку=0,875) до 0,4 км/ч на плотном грунте (ку=1,0) за один условный проход.
Поскольку в реальных условиях уплотнение грунта от рыхлого состояния до
нормативной плотности за один проход практически невозможно в силу упругих
деформаций и циклической релаксации грунтов [1, 33, 40, 57, 147], то уплотнение
должно осуществляться за несколько проходов.
Аналогичные исследования были проведены для супесчаного грунта, на рисунке 5.13 представлены зависимости напряжений от глубины в грунтовом слое
при различной жѐсткости рабочего органа.
178
σ, МПа
0,9
0,8
0,7
0,6
0,5
с 1=8000 кН/м
0,4
0,3
с 1=6000 кН/м
0,2
с 1=1000 кН/м
0,1
0
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
h, м
Рисунок 5.13 – Зависимость напряжений в супесчаном грунте от глубины
в грунтовом слое при различной жѐсткости рабочего органа
σ,МПа
0,50
с1 = 8100 кН/м
0,45
с1 = 7600 кН/м
с1 = 7200 кН/м
0,40
с1 = 6700 кН/м
0,35
0,30
0
0,01
0,02
0,03
0, 04
0, 05
0, 06
0, 07
0,08
0,09 ∆ х , м
Рисунок 5.14 – Зависимость средних напряжений супесчаного грунта
от деформации в грунтовом слое при различной жѐсткости рабочего органа
На рисунке 5.14 представлены зависимости изменения средних напряжений
от деформации супесчаного грунта оптимальной влажности и толщиной уплотняемого слоя 0,5 м. Начальный модуль деформации Е2=10 МПа; начальный коэффициент вязкого трения η=0,5·105 Па·с; начальная плотность ρ0=1445 кг/м3; радиус вальца R=0,6 м; ширина L=1 м; вынуждающая сила F0=50 кН; частота вибровозбудителя f=40 Гц (250 с-1).
179
Предел прочности супесчаного плотного (ку≈1,0) грунта соответствует диапазону контактных напряжений от 0,5 до 0,8 МПа или средним напряжениям в слое
от 0,3 до 0,5 МПа. Диапазон рациональных значений жѐсткости в этом случае от
6000 до 7000 кН/м (рисунки 5.14, 5.15.).
σ, МПа
0,8
0,7
с1 = 8100 кН/м
0,6
с1 = 7600 кН/м
0,5
0,4
0,3
с1 = 7200 кН/м
0,2
с1 = 6700 кН/м
0,1
0
0,1
0,15
0,2
0,25
0,3
0,35
h, м
Рисунок 5.15 – Зависимость напряжений в супесчаном грунте
от глубины при различной жѐсткости рабочего органа
Скоростной режим требует снижения скорости с увеличением плотности и
прочности материала. Несвязанные грунты в большей степени подвержены вибрационной обработке [4, 8, 31, 36, 52, 67, 98, 132], поэтому процесс уплотнения,
по сравнению со связанными грунтами, для супеси происходит более интенсивно,
и скорость движения катка лежит в диапазоне от 4 до 0,5 км/ч за один условный
проход (рисунок 5.16).
Результаты полученных исследований позволяют построить зависимости необходимой поступательной скорости катка, с учѐтом требуемого времени приложения внешней силы, для достижения нормативной плотности за один условный
проход от жесткости рабочих органов катков (рисунок 5.17) при толщине слоя 0,4
м и 0,5 м для суглинка и супеси соответственно. Среднее время приложения силы
для суглинка составляет около 2 с, для супеси – около 1,3 с.
180
Рисунок 5.16 – Рациональная скорость уплотнения супесчаного
грунта на различных этапах уплотнения за один условный проход
Рисунок 5.17 – Скорость уплотнения с учѐтом требуемого времени приложения нагрузки от жѐсткости за один условный проход
181
σ, МПа
0,55
суглинок
0,50
0,45
0,40
супесь
0,35
0,30
4000
5000
6000
7000
8000
с1, кН/м
Рисунок 5.18 – Средние значения напряжений грунта от жѐсткости
рабочего органа
σ, МПа
0,80
0,75
0,70
суглинок
0,65
0,60
0,55
супесь
0,50
0,45
4500
5000
5500
6000
6500
7000
7500
с1, кН/м
Рисунок 5.19 – Значения напряжений в верхней части уплотняемого
слоя грунта (0,1 м) от жѐсткости рабочего органа
182
Теоретические исследования позволили определить зону эффективного уплотнения, по сути, уточнить оптимальную толщину уплотняемого слоя, на основании критических значений виброускорений, при которых ещѐ протекает процесс деформирования уплотняемого грунта. Критические значения величины
виброускорений уплотняемых суглинистых и супесчаных грунтов различной
влажности были установлены проф. Д. Д. Барканом и подтверждены исследованиями М. П. Костельова, H. Amick, D. Pietzsch и др. [11 – 13, 65 –67, 95, 153, 154,
166].
Полученные значения величины зоны эффективного уплотнения (рисунки
5.20, 5.21) совпадают со значениями толщины уплотняемого слоя по анализу распределения напряжений в виброуплотняемых грунтах (рисунки 5.9, 5.11, 5.14,
5.15)
А, м/с
16
2
суглинок
14
с 1 = 10000кН/м
12
10
8
с 1 = 5000кН/ м
6
Зона эффективного уплотнения
4
2
Зона неэффективного уплотнения
с1 =1000 кН/м
0
0
0,1
0,2
0,3
0,4
0,5
h, м
Рисунок 5.20 – Зависимость изменения величины виброускорений
по глубине суглинистого слоя с учѐтом жѐсткости рабочего органа
183
А, м/с2
30
супесь
25
20
с1
= 10000кН/м
15
10
5
с1=5000кН/м
Зона эффективного уплотнения
с 1=1000 кН/м
Зона неэффективного уплотнения
0
0
0,1
0,2
0,3
0,4
0,5
0,6
h, м
Рисунок 5.21 – Зависимость изменения величины виброускорений
по глубине супесчаного слоя с учѐтом жѐсткости рабочего органа
В результате проведѐнных исследований (таблицы 5.1 – 5.4) были получены
регрессионные зависимости, описывающие влияние жесткости пневмошинных
рабочих органов катков на интенсивность протекания процесса уплотнения грунтов.
Таблица 5.1 – Зависимость скорости движения от жѐсткости рабочего органа
катка
Вид
грунта
Суглинок
Регрессионная зависимость
h0, м
(c1 ) 26,007e0,001c1
0,4
Достоверность аппроксимации R2
0,995
Супесь
(c1 ) 43,767e0,0006c1
0,5
0,994
Таблица 5.2 – Зависимости напряжений в грунтах от жѐсткости рабочего органа катка
Напряжения ζ
Вид грунта
Средние по
толщине слоя
В верхней части
уплотняемого
слоя (0,1 м)
Регрессионные зависимости, достоверность аппроксимации
Суглинок, h0=0,4 м
R2
Супесь, h0=0,5 м
R2
(c1 ) 819, 44ln(c1 ) 6463,5 0,999 (c1 ) 795,15ln(c1 ) 6677,1
0,998
(c1 ) 1490,7 ln(c1 ) 11888
0,999
(c1 ) 1413ln(c1 ) 12003 0,999
184
Таблица 5.3 – Зависимости изменения напряжений от глубины грунтового
слоя с учѐтом жѐсткости рабочего органа катка
Жѐст-ть
с1, кН/м
4300
4600
4800
5000
Регрессионные зависимости, достоверность аппроксимации
Суглинок
R2 Жѐст-ть
Супесь
с1, кН/м
(h) 427034ln(h) 288563 0,993 6700 (h) 278024ln(h) 112429
(h) 507937ln(h) 363456 0,994 7200 (h) 372439l n(h) 201293
(h) 507937ln(h) 363456 0,996 7600 (h) 372439l n(h) 201293
(h) 636775ln(h) 484277 0,997 8100 (h) 533847l n(h) 354420
R2
0,993
0,994
0,996
0,997
Таблица 5.4 – Зависимости изменения виброускорений от глубины грунтового слоя с учѐтом жѐсткости рабочего органа катка
Регрессионные зависимости, достоверность аппроксимации
Жѐст-ть
Суглинок
R2 Жѐст-ть
Супесь
R2
с1, кН/м
с1, кН/м
2
A(h) 35,06h 46,615h 16,187
A(h) 59,772h 2 79,875h 26,951 0,999
10000
1,0 10000
A(h) 30,911h 2 41,76h 14,096
A(h) 50,121h 2 69,656h 24,182
6000
1,0 6000
1,0
2
2
A(h) 27,586h 34,732h 11,02 0,999 900
A(h) 46,465h 64,788h 22,036 0,999
900
Анализ зависимостей (рисунки 5.9 - 5.10) позволяет сделать вывод о влиянии
величины жѐсткости РО на интенсивность процесса уплотнения в зависимости от
его стадии (текущего значения плотности грунта). Регулирование жѐсткости РО
позволяет адаптировать НДС и время действия внешней силы, что в свою очередь
определяет скорость движения и количество проходов катка по одному следу (рисунок 5.17).
Для уплотнения суглинистого грунта оптимальной влажности с числом пластичности 7 рациональный диапазон максимальных значений жѐсткости РО
с1=4000…5000 кН/м, при среднем скоростном режиме 4 км/ч и количестве проходов по одному следу 10. Значения вынуждающей силы вибровозбудителя в этом
случае должны быть достаточно высокими: 80 – 100 кН.
Уплотнение грунта при жѐсткости пневмошинного вальца менее с2=4000
кН/м позволяет увеличить время приложения нагрузки на 30%, но в этом случае
наблюдается значительная диссипация вибрации в рабочем органе (рисунок 5.20)
– зона неэффективного уплотнения, что выражено в низких значениях виброускорений и, как следствие, недостаточном НДС грунта (рисунки 5.20, 5.21).
185
При жѐсткости вальца более 5000 кН/м существенно снижается время приложения внешней уплотняющей силы (рисунок 5.17.), что также негативно сказывается на интенсивности деформирования грунтовой среды. При этом напряжения
могут превысить предел прочности, что приведет к разупрочнению грунта (рисунки 5.18, 5.19).
Для уплотнения супесчаного грунта оптимальной влажности процесс интенсивного деформирования соответствует максимальной жѐсткости вальца не менее
с1=6000 кН/м. При жѐсткости рабочего органа более 8000 кН/м, снижается время
приложения уплотняющей внешней силы, к тому же значения напряжений могут
превысить значения предела прочности супесчаного грунта (рисунки 5.18, 5.19),
что неприемлемо для осуществления процесса уплотнения. Рациональными значениями максимальной жѐсткости рабочего органа для уплотнения супесчаного
грунта являются значения с1=6000…7000 кН/м, при этом значения виброускорений соответствуют зоне эффективного уплотнения (рисунок 5.21.).
В реальных условиях процесс уплотнения должен осуществляться за несколько циклов (проходов катка по одному следу). Для супесчаного грунта, с учѐтом рекомендуемого диапазона жѐсткости рабочего органа пневмошинного катка,
средняя рекомендуемая скорость составит около 5 км/ч за 6 проходов (рисунок
5.17.). Значения величины вынуждающей силы могут быть несколько ниже, чем
при уплотнении связанных грунтов – около 50 кН.
Анализ проведѐнных исследований доказал значительное влияние жѐсткости
РО на интенсивность протекания процесса деформирования грунтов. В результате
исследований
были
выявлены
закономерности
изменения
напряжѐнно-
деформируемого состояния грунтов при их обработке вибрационными пневмошинными катками, зависимости изменения скорости от состояния грунта и этапа
уплотнения, определено необходимое количество проходов.
186
5.2 Оптимизация параметров вибрационных катков с пневмошинными рабочими органами для уплотнения грунтов
Результаты математического моделирования уплотнения грунтовой среды
вибрационным катком с пневмошинным рабочим органом позволили установить
функциональные зависимости параметров рабочего органа катка от свойств грунта на различных этапах процесса уплотнения. Полученные решения позволяют
определить рациональный диапазон значений параметров пневмошинного рабочего органа в зависимости от изменяющихся свойств обрабатываемой среды. В
силу достаточной сложности рассматриваемого процесса и множества факторов,
влияющих на интенсивность его протекания, необходимо синтезировать такие
значения данных параметров, при которых процесс уплотнения будет происходить с максимальной интенсивностью при минимальных энергозатратах.
Необходимо решить задачу по оптимизации параметров вибрационного катка
с пневмошинным рабочим органом для уплотнения грунтов. Задача оптимизации
процесса уплотнения может быть решена методами математического описания
данного физического процесса функцией нескольких переменных, при наложении
на них определѐнных ограничений [78]. В качестве целевой функции в нашем
случае целесообразно принять коэффициент уплотнения ку, который является качественным критерием эффективности уплотнения грунтовых сред.
Коэффициент уплотнения в нашем случае является функцией от некоторых
переменных, которые в свою очередь зависят от физико-механических свойств
грунта и технологических факторов.
ку=f (X, ) ,
(5.1)
где Х – вектор-столбец переменных задачи, X (c1,F0 ,f ,n) ; - вектор-столбец
Т
задаваемых параметров, характеризующих свойства грунта и технологические
факторы, (с2 ,b2 ,E2 ,h 0 ,L,R, 0 )Т .
Запишем задачу математического программирования в общем виде [78]:
187
G(X) (0,85 к у ) min .
(5.2)
Функция G(X) является функцией, у которой необходимо найти экстремум.
Экстремум данной функции будет соответствовать максимальным значениям ку,
которые должны достигаться за минимальное количество циклов n (периодов колебаний РО) с учѐтом остальных переменных, входящих в вектор столбец Х.
Задача линейного программирования записывается в виде:
G(X) (a1c1 a 2 F0 a 3f a 4 n) min .
Экстремум предложенной функции необходимо определить в рациональной
области значений переменных при безусловном протекании процесса уплотнения
до ку=1, который характеризуется конечным насыщением остаточных деформаций Δх, за минимальное количество циклов n.
Значения коэффициентов для линейного функционала определились в результате имитационного моделирования.
a1
a
2
a 3
a 4
0,00183333
0,40000000
;
для суглинка
0,7300000
0,50000000
0,00014166
0,0020000
.
для супеси
0,02500000
0,5000000
Система линейных ограничений:
1000000 c1 10000000;
50000 F 100000;
0
.
30
f
40;
8 n 36.
Рассмотрим решение многомерной задачи оптимизации для функции G(X) от
четырѐх переменных с использованием симплекс-метода линейной оптимизации.
В качестве инструмента, реализующего данный метод оптимизации, использован
пакет оптимизации программной среды Maple 11 – Optimization Assistant. Оптимизация параметров проводилась на примере уплотнения связанного грунта оптимальной влажности на трѐх стадиях процесса уплотнения (1. 0,85 к у 0,9 ; 2.
0,90 к у 0,95 ; 3. 0,95 к у 1,0 ). Методика определения оптимальных параметров приведена на рисунке 5.22.
188
В результате процедуры оптимизации установлены экстремумы целевой
функции для начальной, средней и заключительной стадий процесса уплотнения
(рисунки 5.23 – 5.25, таблица 5.5).
В соответствии с практическими рекомендациями по уплотнению грунтов
[116], первые проходы необходимо осуществлять в статическом режиме, поэтому
при значениях ку менее 0,9 частота вибровозбудителя равна 0.
Исходные данные: физико-механические свойства грунта,
начальная плотность, толщина слоя, геометрические размеры
рабочего органа
Обработка результатов имитационной модели динамического
деформирования уплотняемой среды
Определение функционала, выражающего зависимости,
характеризующие интенсивность процесса уплотнения, от жѐсткости
рабочего органа и параметров вибрации
Установление области допустимых решений (ОДР) для нахождения
оптимальных параметров пневмошинного рабочего органа
Решение задачи оптимизации
Выходные данные: оптимальные параметры процесса уплотнения
(с1, F0, f, n)
Рисунок 5.22 – Методика определения оптимальных параметров вибрационных катков с пневмошинными рабочими органами
189
Таблица 5.5 – Рекомендуемые параметры вибрационного катка с пневмошинным рабочим органом при уплотнении суглинка оптимальной влажности
Стадия процесса
Жѐсткость
Амплитуда вынуждающей силы
Частота f,
с1, кН/м
F0, кН
Гц
Начальная, 0,85 к у 0,90
998,5
48,4
0
Средняя, 0,90 к у 0,95
2999
74,9
30
Заключительная, 0,95 к у 1,0
5000
100
40
Рисунок 5.23 – Оптимальные значения параметров катка на начальной
стадии процесса уплотнения 0,85 к у 0,9
190
Поскольку решение функционала с числом переменных более трѐх в трѐхмерном пространстве не может быть представлено в явном виде, то результат оптимизации представляется в виде плоскости среза функционального пространства
фиксированием двух из четырѐх параметров в явном виде и точки глобального
оптимума на этом срезе, от взаимно зависимых двух оставшихся параметров неявного вида (рисунки 5.23 – 5.25).
Рисунок 5.24 – Оптимальные значения параметров катка на средней
стадии процесса уплотнения 0,9 к у 0,95
191
Рисунок 5.25 – Оптимальные значения параметров катка на заключительной
стадии процесса уплотнения 0,95 к у 1,0
Оптимизация параметров вибрационного катка с пневмошинным рабочим
органом при уплотнении супесчаного грунта проведена в соответствии с разработанной методикой (рисунок 5.22). Результаты оптимизации представлены в таблице 5.6.
192
Таблица 5.6 – Оптимальные параметры вибрационного катка с пневмошинным рабочим органом при уплотнении супеси оптимальной влажности
Стадия процесса
Жѐсткость
с1, Вынуждающая
Частота f,
кН/м
сила F0, кН
Гц
Начальная, 0,85 к у 0,90
1010
24,8
0
Средняя, 0,90 к у 0,95
4150
35
33
Заключительная, 0,95 к у 1,0
6100
49,7
42
5.3. Сравнительный анализ теоретических и экспериментальных данных процесса уплотнения грунтов вибрационными катками
Для экспериментального подтверждения результатов исследований и оценки
адекватности математической модели на кафедре ЭСМиК ФГБОУ ВПО «СибАДИ» был создан экспериментальный образец пневмошинного вибрационного дорожного катка с изменяемой жѐсткостью рабочего органа (рисунок 5.26.). Проведены эмпирические испытания уплотнения суглинистого и супесчаного грунтов
экспериментальным образцом катка. С целью сравнения возможностей предлагаемых катков с классическими жѐстковальцовыми вибрационными катками использовался вибрационный каток ДУ-107 (ОАО «Раскат», г. Рыбинск) (рисунок
5.27).
Общая методика проведения эксперимента соответствует методике, изложенной в 4-й главе. Для подтверждения теоретических исследований выполнялся
многофакторный эксперимент, измерялись виброускорения, плотность грунта после каждого прохода катка и дуга контакта рабочего органа с грунтом. При этом
менялись такие факторы, как влажность грунта, жѐсткость РО, частота колебаний
вибровозбудителя и вынуждающая сила. В грунтовом канале кафедры ТНКИ
ФГБОУ ВПО «СибАДИ» проводились испытания по уплотнению суглинистого
грунта с числом пластичности 7 (рисунки 5.27 – 5.32). Уплотнение супеси проводилось в полевых условиях (рисунки 5.33 – 5.38).
193
Рисунок 5.26 – Экспериментальный образец адаптивного катка
Оценка проведенных исследований проводилась не только сравнительным
анализом данных, полученных теоретическим и экспериментальным путѐм, для
опытного образца и классического ДУ-107, но и сравнительным анализом возможностей предлагаемых адаптивных катков с перспективным вибрационным
пневмошинным катком Sakai GW-750 (Япония, рисунок 5.39) [93]. Данный каток
был представлен в 2007 г., и с тех пор он зарекомендовал себя как высокоэффективная уплотняющая машина для различных видов грунтов и асфальтобетонных
покрытий. Эффективность уплотнения Sakai GW-750, по данным производителя,
проиллюстрирована на рисунок 5.40.
194
Рисунок 5.27 – Экспериментальный образец адаптивного
катка и вибрационный каток ДУ-107 (ОАО «Раскат»)
Рисунок 5.28 – Уплотнение суглинистого грунта адаптивным катком
195
Рисунок 5.29 – Уплотнение суглинистого грунта вибрационным
катком ДУ-107 (ОАО «Раскат»)
Рисунок 5.30 – Контроль плотности при уплотнении
суглинистого грунта адаптивным пневмошинным катком
196
Рисунок 5.31 – Контроль плотности при уплотнении
суглинистого грунта адаптивным пневмошинным катком
Рисунок 5.32 – Контроль плотности при уплотнении суглинистого
грунта вибрационным катком ДУ-107 (ОАО «Раскат»)
(по числу ударов ударником ДорНИИ)
197
Рисунок 5.33 – Уплотнение супесчаного грунта
адаптивным катком
Рисунок 5.34 – Уплотнение супесчаного грунта
адаптивным катком
198
Рисунок 5.35 – Контроль плотности при уплотнении
супесчаного грунта адаптивным катком
Рисунок 5.36 – Уплотнение супесчаного
грунта катком ДУ-107 (ОАО «Раскат»)
199
Рисунок 5.37 – Уплотнение супесчаного грунта
катком ДУ-107 (ОАО «Раскат»)
Рисунок 5.38 – Контроль плотности при уплотнении
супесчаного грунта катком ДУ-107 (ОАО Раскат)
200
Рисунок 5.39 – Вибрационный пневмошинный
каток Sakai GW-750 (Япония)
Рисунок 5.40 – Эффективность уплотнения асфальтобетона
и суглинистого грунта вибрационным пневмошинным катком
Sakai GW-750 и пневмошинным статическим катком (28 т) [93]
201
Анализ эффективности применения вышеназванных катков и оценка адекватности математического моделирования могут быть проведены посредством
сравнения графических зависимостей на рисунки 5.41, 5.42, 5.44, 5.61. Анализ
проводится по результатам обработки экспериментальных и теоретических данных, полученных при уплотнении суглинистого и супесчаного грунтов. Использовались данные при обработке грунтов экспериментальным образцом адаптивного катка, вибрационным катком ДУ-107 (ОАО «Раскат», г. Рыбинск), а также данные по уплотнению суглинистого грунта вибрационным пневмошинным катком
Sakai GW-750 (Япония).
ку
ку
1,00
1,00
4
3
0,98
4
7
1
0,98
3
1
5
0,96
0,96
8
2
2
0,94
0,94
6
0,92
Эксперимент 0, 2 МПа (0,95W0)
1
0,90
0,88
0,86
2
Sakai GW-750 2 ст. (0,95W0)
3
Sakai GW-750 3 ст. (0,95W0)
4
Эксперимент 0, 6 МПа (0,95W0)
5
Эксперимент ДУ-107 (0,95W0)
6
Эксперимент 0, 2 МПа (0,9W0)
7
Эксперимент 0, 6 МПа (0,9W0)
8
Эксперимент ДУ-107 (0,9W0)
0,92
0,90
Эксперимент 0, 5 МПа (0,95W0)
1
2
0,88
Эксперимент 0, 5 МПа (0,9W0)
3
Моделирование 0, 5 МПа (0,95W0)
4
Моделирование 0, 5 МПа (0,9W0)
0,86
0,84
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
n
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Рисунок 5.41 – Анализ результатов математического моделирования
и экспериментальных данных при уплотнении суглинистого грунта
Значения напряжений в виброуплотняемых грунтах экспериментально исследовались как отечественными, так и зарубежными учѐными, в частности
Г. Н.
Поповым, M. A. Mooney, R. V. Rinehart, L. Forssblad, S. Cessler и др. [91, 92, 141,
153, 161 – 164, 168, 172]. Значения средних динамических напряжений в грунтовом слое, полученные в результате математического моделирования, сравнивались с экспериментальными данными, полученными в лаборатории фирмы
«DINAPAK» (Швеция) доктором Л. Форссбладом [141] (рисунок 5.43, 5.44.).
n
202
ку
ку
1,00
1,00
2
2
1
6
3
3
0,97
0,97
0,94
0,94
1
4
5
4
1
Эксперимент 0, 5 МПа (W0)
1
Эксперимент 0, 2 МПа (W0)
2
Эксперимент 0, 6 МПа (W0)
2
Эксперимент ДУ-107 (W0)
3
Эксперимент 0, 5 МПа (0,9W0)
3
Эксперимент 0, 2 МПа (0,9W0)
4
Моделирование 0, 5 МПа (W0)
4
Эксперимент ДУ-107 (0,9W0)
5
Моделирование 0, 5 МПа (0,9W0)
6
Моделирование 0, 6 МПа (0,9W0)
0,91
0,91
0,88
0,88
0,85
0,85
1
2
3
4
5
6
7
8
9
n
1
2
3
4
5
6
7
8
9
n
Рисунок 5.42 – Анализ результатов математического моделирования
и экспериментальных данных при уплотнении супесчаного грунта
1
2
3
4
5
6
Рисунок 5.43 – Экспериментальные значения средних
динамических напряжений в уплотняемом грунтовом
слое (по Л. Форссбладу), лаборатория «Динапак» (Швеция)
203
0,1
0,2
0,3
0,4
0,5
0,6
σ , МПа
0
2
6
1
5
0,2
3
4
0,4
h,м
1 – уплотнение суглинка катком 3,3 т (по Л. Форссбладу); 2 – уплотнение суглинка
катком 3,3 т (модель); 3 – уплотнение супеси катком 3,3 т (по Л. Форссбладу);
4 – уплотнение супеси катком 3,3 т (модель); 5 – уплотнение супеси виброкатком 1,4 т
(по Л. Форссбладу); 6 – уплотнение супеси виброкатком 1,4 т (модель)
Рисунок 5.44 – Результаты теоретических и экспериментальных значений
средних динамических напряжений в уплотняемом грунтовом слое
Адекватность математического моделирования процесса уплотнения суглинистого и супесчаного грунтов оценивалась сравнением максимального расхождения теоретических и экспериментальных данных. Сравнительные результаты
показали, что абсолютная погрешность не превышает 12 %.
5.4. Исследования влияния жѐсткости рабочих органов катков на значения
виброускорений в виброуплотняемых грунтах
Необходимость данных исследований обусловлена огромным влиянием, которое оказывают параметры динамического возмущения на интенсивность протекания процесса уплотнения в обрабатываемой среде. Согласно исследованиям П.
204
А. Ребиндера [99], для эффективного уплотнения среды, состоящей из различных
по величине частиц, необходимо применять определѐнные частотные режимы.
Профессор Д. Д. Баркан доказал, что виброуплотнение в наибольшей степени зависит от величины ускорения частиц грунта. Увеличение значений виброускорений приводит к снижению диссипации энергии и увеличению эффекта уплотнения. Позже исследования проф. Н. Я. Хархуты подтвердили эти положения, было
установлено, что амплитуда колебаний влияет на эффективность виброуплотнения, поскольку она пропорциональна значениям виброускорений.
В ФГБОУ ВПО «СибАДИ» был проведен ряд экспериментальных исследований. Проводилась укатка слоя грунта толщиной до 0,6 м опытным образцом и
катком ДУ-107. Регулировалась частота колебаний вибровозбудителя на различных этапах уплотнения. При помощи четырѐхканального виброизмерителя «Экофизика» (рисунок 5.45), исследовались значения виброускорений колебаний в уплотняемом грунте, тенденции их затухания в зависимости от удалѐнности источника виброуплотнения, а также направление распространения вибрации от поверхности по толщине обрабатываемого слоя грунта.
1– ИИБ «ЭКОФИЗИКА»; 2 – кабель Микродот-3хBNC (АК-20 и аналогичные);
3 – трехкомпонентный IEPE-датчик (АР2082М, РСВ 317А41, АР2038 и аналогичные)
Рисунок 5.45 – Схема 1 подключения вибродатчиков со встроенной электроникой (ICP, IEPE)
Методика экспериментальных исследований соответствует положениям,
представленным в 4-й главе. Исследовалась тенденция распространения волн на
поверхности и в глубине обрабатываемого слоя в виде зависимостей изменения
205
величин виброускорений от места расположения датчиков по глубине уплотняемого грунтового слоя. В опыте №1 значения канала Z фиксируют значения виброускорений по вертикальной оси х, значения канала Y – значения виброускорений по оси движения катка y, значения канала Х – величину виброускорений по
оси перпендикулярной движению катка z. В опыте №2 одноосевые датчикиакселерометры закладывались по глубине слоя через 15 см: на глубине 15, 30, 45,
60 см (рисунки 5.46 – 5.48).
Рассматривалась ситуация на различных частотах, при различной влажности.
Данные фиксировались в виде файлов.
Рисунок 5. 46 – Определение виброускорений в супесчаном грунте
206
Рисунок 5.47 – Определение виброускорений в суглинистом грунте
Рисунок 5.48 – Определение виброускорений трѐхосевым датчиком
207
Контроль плотности осуществлялся методом режущих колец и экспрессметодом с помощью ударника ДорНИИ. Испытания проводились на суглинистом
и супесчаном грунтах.
По результатам экспериментальных исследований (приложение 2) были построены АЧХ значений виброускорений в уплотняемых грунтах (рисунки 5.49 –
5.54.). Основной задачей исследований является определение степени влияния
жѐсткости рабочего органа на интенсивность процесса виброуплотнения грунтовой среды. По оси абсцисс откладывалась величина относительных виброускорений в грунте Авых/А, здесь Авых - величина виброускорений, измеренная пьезоэлектрическим датчиком-акселерометром на соответствующей глубине грунтового слоя (0, 15 м; 0,3 м; 0, 45 м); А – величина виброускорений под рабочим органом катка на поверхности грунта.
Анализируя полученные амплитудно-частотные характеристики, можно сделать вывод, что рациональным частотным режимом будет обработка грунта на
частотном режиме около 30 – 40 Гц. Именно в этой области датчики фиксировали
максимальные значения виброускорений, причем основная волна сжатия проходит в вертикальной плоскости, в горизонтальной плоскости виброволны распространяются с гораздо меньшей интенсивностью. Сравнивались амплитудные значения виброускорений, которые фиксировались на поверхности уплотняемых
грунтов, при обработке ДУ-107 с металлическим вальцом и экспериментальным
образцом с пневмошинным вальцом. На основании полученных данных становится очевидно, что применение металлических бандажей, для достижения жѐсткости вальца с1>5000 кН/м, позволяет избежать диссипации энергии в пневмовальце
и величина относительных виброускорений в уплотняемой грунтовой среде будет
сопоставима со значениями виброускорений от катка с металлическим вальцом.
208
Авых/А
Авых/А
0,9
Авых/А
0,7
0,9
0,8
0,8
0,15 м
0,7
0,7
0,6
0,6
0,30 м
0,5
0,15 м
0,30 м
0,2
0,3
0,3
0,45 м
0,45 м
0,2
0,1
0
0
24
26
28
30
f, Гц
32
0,45 м
0,2
0,1
0,1
0,30 м
0,4
0,4
0,3
0,15 м
0,5
0,5
0,4
0,6
0
24
26
28
30
32
f, Гц
34
36
38
40
42
f, Гц
Рисунок 5.49 – Амплитудно-частотные характеристики значений виброускорений по глубине слоя при ку=0,90;
0,95; 0,99 соответственно (суглинок, влажность 0,9W0, экспериментальный образец катка, с1=1000кН/м)
Авых/А
0,9
Авых/А
0,9
0,8
Авых/А
0,9
0,8
0,7
0,15 м
0,7
0,15 м
0,6
0,6
0,30 м
0,5
0,4
0,4
0,2
0,2
0,2
0,1
0,1
0,1
0
0
26
28
30
32
f, Гц
0,45 м
0,4
0,3
24
0,30 м
0,5
0,45 м
0,3
0,3
0,15 м
0,7
0,6
0,5
0,45 м
0,8
0,30 м
0
24
26
28
30
32
f, Гц
34
36
38
40
42
f, Гц
Рисунок 5.50 – Амплитудно-частотные характеристики виброускорений по глубине слоя при ку=0,90; 0,95; 0,99
соответственно (суглинок, влажность 0,9W0, экспериментальный образец катка, с1=5000кН/м)
209
Авых/А
1
Авых/А
1
Авых/А
1
0,9
0,9
0,9
0,8
0,8
0,15 м
0,7
0,6
0,7
0,6
0,30 м
0,5
0,6
0,2
0,1
0
0
26
28
30
32
f, Гц
0,3
0,45 м
0,2
0,1
24
0,4
0,3
0,45 м
0,30 м
0,5
0,4
0,3
0,15 м
0,7
0,30 м
0,5
0,4
0,8
0,15 м
0,45 м
0,2
0,1
24
26
28
30
0
f, Гц
32
34
36
38
40
42
f, Гц
Рисунок 5.51 – Амплитудно-частотные характеристики виброускорений по глубине слоя при ку=0,90; 0,95; 1,0 соответственно (супесь, влажность W0, экспериментальный образец катка, с1=1000кН/м)
Авых/А
1,2
Авых/А
1,2
Авых/А
1,2
0,15 м
1,0
1,0
0,15 м
0,8
1,0
0,8
0,30 м
0,6
0,8
0,30 м
0,45 м
0,6
0,6
0,45 м
0,4
0,4
0,4
0,2
0,2
0,2
0
24
26
28
30
32
f, Гц
0,15 м
0,30 м
0,45 м
0
24
26
28
30
32
f, Гц
0
34
36
38
40
42
f, Гц
Рисунок 5.52 – Амплитудно-частотные характеристики виброускорений по глубине слоя при ку=0,90; 0,95; 1,0 соответственно (супесь, влажность W0, экспериментальный образец катка, с1=6000кН/м)
210
Авых/А
1
Авых/А
1
0,9
Авых/А
1
0,9
0,9
0,8
0,8
0,15 м
0,7
0,6
0,7
0,7
0,6
0,30 м
0,5
0,8
0,15 м
0,6
0,30 м
0,5
0,3
0,2
0,1
0,1
0
0
30
31
32
0,4
0,3
0,45 м
0,2
33
0,15 м
0,45 м
0,3
0,45 м
0,2
0,1
0
30
f, Гц
34
0,30 м
0,5
0,4
0,4
31
32
33
f, Гц
34
34
36
38
40
f, Гц
42
Рисунок 5.53 – Амплитудно-частотные характеристики виброускорений по глубине слоя при ку=0,90; 0,95; 0,99 соответственно (суглинок, влажность 0,9W0, каток ДУ-107)
Авых/А
1
0,15 м
0,9
Авых/А
1
Авых/А
1
0,9
0,8
0,30 м
0,7
0,6
0,5
0,15 м
0,8
0,30 м
0,7
0,6
0,45 м
0,4
0,8
0,7
0,5
0,4
0,4
0,3
0,3
0,3
0,2
0,2
0,2
0,1
0,1
0,1
0
0
30
31
32
33
34
f, Гц
0,30 м
0,6
0,45 м
0,5
0,15 м
0,9
0,45 м
0
30
31
32
33
34
f, Гц
34
36
38
40
42
f, Гц
Рисунок 5.54 – Амплитудно-частотные характеристики виброускорений по глубине при ку=0,90; 0,95; 0,99 соответственно (супесь, влажность W0, каток ДУ-107)
211
Дальнейшие исследования подтверждают экспоненциальную зависимость
угасания виброколебаний по глубине обрабатываемого грунта. В связанном суглинистом грунте виброускорения затухают быстрее, чем в несвязанном супесчаном. Значения минимальной жѐсткости пневмошинного вальца, при которой ещѐ
эффективно использовать вибрацию, на конечной стадии на процесса уплотнения
лежат в диапазоне 4000 – 6000 кН/м, в зависимости от типа грунта.
Полученные экспериментальные значения виброускорений позволяют оценить адекватность математической модели путѐм сравнения этих данных со значениями виброускорений в грунте, полученных при математическом моделировании. Анализ адекватности математического моделирования процесса взаимодействия «рабочий орган – деформируемая среда» проводится сравнением теоретических и экспериментальных данных для значений виброускорений в уплотняемом
супесчаном грунте.
А , м/с2
20
2
1
15
3
10
4
5
0
0
0,1
0,2
0,3
0,4
h, м
1 – экспериментальные значения виброускорений в грунте, с1=6000 кН/м;
2 – теоретические значения виброускорений в грунте, с1=6000 кН/м;
3 – экспериментальные значения виброускорений в грунте, с1=1000 кН/м;
4 – теоретические значения виброускорений в грунте, с1=1000 кН/м
Рисунок 5.55 – Результаты сравнения теоретических и экспериментальных
значений виброускорений в супесчаном грунтовом слое
212
Сравнение результатов процесса виброуплотнения супесчаного грунта вибрационным катком с пневмошинным рабочим органом представлено на рисунке
5. 55. Поскольку математическая модель подразумевает взаимодействие сосредоточенных масс, то для анализа экспериментальных данных можно использовать
усреднѐнные значения виброускорений от трѐх датчиков-акселерометров [69],
расположенных на различной глубине в уплотняемом слое грунта.
Общий анализ адекватности математического моделирования экспериментальным исследованиям показал хорошую сходимость результатов. Расхождение
теоретических и экспериментальных данных не превысило 12%.
5.5. Анализ энергоэффективности вибрационных катков с пневмошинными
рабочими органами
5.5.1. Анализ энергоэффективности передачи вибрации уплотняемой
грунтовой среде
На основании проведѐнных теоретических и экспериментальных исследований о влиянии жѐсткости рабочего органа катка на интенсивность процесса уплотнения, предложен дополнительный критерий оценки относительной энергоэффективности процесса виброуплотнения грунтов катками с пневмошинными
рабочими органами – коэффициент относительной энергоэффективности передачи вибрации кп. Данный коэффициент характеризует изменение величины виброускорений, а значит, и эффективность передачи энергии вибровозбудителя уплотняемой среде через валец катка.
кп
А(мет)
А(сi)
,
(5.3)
где А(мет) – величина виброускорений в грунте для металлического вальца, м/с2
(жѐсткость металлического вальца принимается не менее 10 000 кН/м [153, 166]);
213
А(сi) – величина виброускорений в грунте при различной жѐсткости пневмошинного РО, м/с2.
По результатам обработки АЧХ (рисунки 5.49. – 5.54.) можно определить
средние значения относительных виброускорений при различной жѐсткости рабочих органов (таблица 5.7) и построить зависимость коэффициента энергоэффективности передачи вибрации кп от жѐсткости рабочего органа (таблица 5.8, рисунок 5.56).
Таблица
5.7
–
Значения
относительных
виброускорений
в
грунте
от жѐсткости рабочего органа
Жѐсткость рабочего органа
Суглинок
Супесь
1000, кН/м
5000, кН/м
6000, кН/м
10000, кН/м
Относительные средние виброускорения
0,431
0,577
0,659
0,574
0,704
0,713
Таблица 5.8 – Значения коэффициента относительной энергоэффективности
передачи вибрации
Жѐсткость рабочего органа
Суглинок
Супесь
1000, кН/м
5000, кН/м
6000, кН/м
10000, кН/м
Коэффициент энергоэффективности передачи вибрации, кп
0,654
0,875
1,0
0,805
0,987
1,0
Зависимость кп от жѐсткости РО (рисунок 5.56) показывает, что с увеличением жѐсткости рабочего органа свыше 6000 кН/м эффективность передачи энергии
вибровозбудителя уплотняемому грунту приближается к энергоэффективности
вибрационного катка с металлическим вальцом.
214
кп
1,00
Супесь
0,95
0,90
0,85
Суглинок
0,80
0,75
0,70
0,65
1000
2000
3000
4000
5000
6000
7000
8000
9000 с1, кН/м
Рисунок 5.56 – Зависимость коэффициента относительной
энергоэффективности передачи вибрации от жѐсткости рабочего органа
5.5.2. Сравнительный анализ эффективности уплотнения грунтов вибрационными катками с пневмошинными рабочими органами
Эффективность уплотнения грунтов различными дорожными катками оценивается показателями достигаемой конечной плотности. Здесь наиболее распространѐнным критерием является полученный коэффициент уплотнения ку.
к у / ст
(5.4)
где ρст – плотность, полученная стандартным способом; ρ – плотность полученная
в результате уплотнения.
Необходимо отметить, что в чистом виде ку не даѐт объективной картины об
эффективности того или иного уплотняющего средства, поскольку необходимо
учитывать время, за которое была получена итоговая плотность, трудоѐмкость
производства работ, массогабаритные показатели и другие характеристики уплотняющих средств. Поэтому, с точки зрения оценки эффективности работы катков с
пневмошинными РО, предлагается оперировать коэффициентом уплотнения по
215
отношению к количеству проходов по одному следу, скорости движения катков,
увязанных со средними удельными контактными напряжениями. Количество проходов и средняя скорость движения позволяют оценить время, затраченное на получение итоговой плотности (и соответственно коэффициента уплотнения), а
удельные контактные напряжения могут являться обобщѐнной характеристикой
распределѐнной массы по отношению к количеству и типу вальцов уплотняющего
средства с учѐтом их размеров.
Энергозатраты на процесс уплотнения напрямую зависят от общего количества проходов катка по одному следу (возможно нескольких типоразмеров катков) и массы уплотнителя, т.к. именно она определяет эффективную мощность
двигателя и удельный расход топлива.
На основании вышеизложенного можно сделать вывод, что критерием эффективности процесса уплотнения коэффициент уплотнения может служить только по отношению к перечисленным параметрам.
Данные для анализа эффективности вибрационных катков представлены в
таблице 5.9.
Таблица 5.9 – Сравнительный анализ эффективности применения вибрационных катков
Модель
катка
Адаптив-й
0,2 МПа
0,5 МПа
0,6 МПа
Sakai
2 стад
4 стад
DYNAPAC
CA250D
ДУ-85
ДУ-107
Удельное
давление,
МПа
Вынуж-я
сила/
частота,
кН/Гц
Скор-ть
средняя,
км/ч
Количество проходов
Суглинок Супесь
Коэффициент уплотнения ку
Суглинок
Супесь
0,0512
0,1000
0,1250
0,1878
47/40
4
8 (9)
7 (9)
7(11)
7
6
6
0,97 (0,93)*
0,99 (0,96) *
0,99 (0,99) *
0,99
1,0
1,0
4
0,1705
24,5/40
42/40
246/33
3
-(16)
-(16)
16
11
9
16
- (0,96) *
- (0,99) *
0,98**
0,98
1,0
1,0*
0,2333
0,06240
150/24
6,2/60
3
3
10
7
8
7 (9)
0,95*
0,96(0,93) *
0,95
0,99
(0,97)
* Значения влажности для грунтов для супеси – W0, для суглинка – 0,95W0 (0,9W0)
216
Сравнительный анализ, приведѐнных данных в таблице 5.9, позволяет дать
оценку эффективности применения катка с адаптивным рабочим органом при уплотнении несвязанного супесчаного и связанного суглинистого грунта по отношению к вибрационным каткам с металлическими вальцами: DYNAPAC CA250D
(10,050 т, вибровальцовый модуль 5,45 т), «Раскат» ДУ – 85 (13 т, вибровальцовый модуль 7 т), «Раскат» ДУ-107 (1,5 т вибровальцовый модуль
0, 5 т), а так-
же к импортному вибрационному пневмошинному катку SAKAI
GW-750 (9 т)
при толщине уплотняемого слоя 35-40 см, влажности 0,95 W0 [144].
Каток с адаптивным рабочим органом достиг коэффициента уплотнения
ку=0,99 на суглинистом грунте влажностью 0,95 W0 и толщине слоя 40 см за 11
проходов по одному следу, необходимые удельные контактные напряжения составили 0,125 МПа, средняя скорость движения – 4 км/ч.
Каток DYNAPAC CA250D достигает коэффициента 1,0 на супесчаном грунте
толщиной слоя 40 см и оптимальной влажности за 16 проходов. Удельные контактные напряжения составляют 0,1705 МПа, средняя скорость – 3 км/ч, при этом
данный каток должен работать в паре с лѐгким катком, т.к. должен быть обеспечен предварительный коэффициент уплотнения не ниже к у=0,95. На суглинке при
тех же условиях достигается коэффициент уплотнения ку=0,98.
Каток ДУ-85, выпускаемый на заводе «Раскат» в г. Рыбинск, достигает коэффициента 0,95 на супесчаном грунте толщиной 40 см и с оптимальной влажностью за 8 проходов. Удельные контактные напряжения – 0,233 МПа, средняя скорость – 3 км/ч. На суглинке коэффициент уплотнения ку=0,95 достигается за 10
проходов катка по одному следу [149].
Каток ДУ-107 на суглинке влажностью 0,95 W0 и толщине слоя 40 см достигает коэффициента уплотнения ку=0,93 за 7 проходов при средней скорости 3 км/ч
и контактных напряжениях, равных 0,0624 МПа. Для дальнейшего повышения коэффициента уплотнения возникает необходимость использования ещѐ одного дорожного катка с увеличенной массой.
Каток SAKAI GW-750 достигает на суглинке влажностью 0,95 W0 и толщине
слоя 40 см коэффициента уплотнения ку= 0,99, но требуемое количество проходов
217
и удельные контактные напряжения при такой же скорости движения (4 км/ч)
значительно превышают характеристики адаптивного пневмошинного катка (16 и
0,188 МПа соответственно).
Таким образом, можно сделать вывод, что применение катка с адаптивным
пневмошинным рабочим органом на связанных грунтах, по эффективности уплотнения, показывает лучшие результаты по сравнению с классическими вибрационными катками, и даже по сравнению с высокопроизводительным импортным
аналогом Sakai GW-750 (9 т). В свою очередь, Sakai GW-750 превосходит по уплотняющему эффекту все подобные по массе вибрационные катки, даже 25тонный статический каток на пневмошинах.
На несвязанных грунтах каток с пневмошинным рабочим органом показывает
ещѐ лучшие результаты.
Рассчитаем ориентировочную производительность вибрационного катка с
пневмошинным РО и катка Sakai GW-750 при уплотнения связанного суглинистого грунта.
П экс
L уч (L A пер )h 0 k в
,
L уч
(
)n
(5.5)
где Lуч – длина укатываемого участка, м; L – ширина укатываемой полосы, м; Апер
– величина перекрытия проходов, м (Апер=0,2 м); h0 –толщина слоя, м; кв – коэффициент использования рабочего времени, (кв=0,85); - рабочая скорость катка,
м/ч; n – необходимое число проходов для достижения нормативной плотности.
Падап
экс
200(1,58 0,2) 0,35 0,85
130 м3/ч;
200
11
3500
218
Пsakai
экс
200(1,58 0,2) 0,35 0,85
101 м3/ч.
200
16
3500
Производительность катка с адаптивными рабочими органами при уплотнении связанного грунта слоем 35 см превышает производительность зарубежного
аналога SAKAI GW-750 на 30%. На основании результатов проведѐнных исследований сделан ориентировочный расчѐт экономического эффекта от использования
только одного адаптивного катка (приложение 3), который составит до 600
000руб/год. При этом необходимо отметить, что данный эффект получен лишь
сравнением по производительности с наиболее современным и эффективным импортным аналогом. Здесь не учитывается эффект от высвобождения ресурсов в
сравнении с классическими дорожными катками при производстве строительных
работ, за счѐт уменьшения типоразмеров и снижения массогабаритных характеристик специализированных комплектов машин (СКМ).
Экономический эффект, при замещении 2-х отечественных катков разных
типоразмеров одним вибрационным катком с пневмошинным рабочим органом,
составил до 1 200 000 руб. (приложение 3).
5. 6. Выводы по главе
1. Изготовлен экспериментальный образец вибрационного катка с пневмошинным рабочим органом диаметром 1м, способный изменять жѐсткость в диапазоне 500 – 6000 кН/м (за счѐт изменения давления воздуха в шинах и установки
дополнительных металлических бандажей), удельные контактные напряжения – в
диапазоне 0,045 – 0,125 МПа, вынуждающую силу – 24, 47 кН частоту колебаний
– 30, 40 Гц.
2. Исследования уплотнения грунтов экспериментальным образцом вибрационного катка с пневмошинным рабочим органом выявили зависимости распределения напряжений в уплотняемом грунте, рациональные значения жѐсткости ра-
219
бочих органов и время приложения внешней силы с учѐтом скоростного режима и
количества проходов катка по одному следу. Рациональные значения средних по
толщине слоя напряжений ζ при уплотнении суглинистого грунта соответствуют
жѐсткости рабочего органа с1=4000…5000 кН/м, при скоростном режиме 4 км/ч,
количестве проходов по одному следу, равном 10. Значения средних по толщине
слоя рациональных напряжений ζ при уплотнении супесчаного грунта соответствуют жѐсткости с1=6000…7000 кН/м, скоростном режиму 5 км/ч, количеству проходов по одному следу, равному 6.
3. Разработана методика оптимизации параметров вибрационного катка с
пневмошинным рабочим органом. Установлены оптимальные значения параметров катка при уплотнении суглинистого грунта оптимальной влажности: на начальной стадии (с1=998 кН/м, F0= 0 кН, f=0 Гц), средней стадии (с1=2999 кН/м,
F0= 74,9 кН, f=30 Гц) и заключительной стадии (с1=5000 кН/м, F0= 100 кН, f=40
Гц), а также оптимальные параметры катка при уплотнении супесчаного грунта
оптимальной влажности: на начальной стадии (с1=1010 кН/м, F0= 0 кН, f=0 Гц),
средней стадии (с1=4150 кН/м, F0= 35 кН, f=33 Гц) и заключительной стадии
(с1=6100 кН/м, F0= 49,7 кН, f=42 Гц).
4. Определены зависимости распространения виброускорений по толщине
слоя в уплотняемых грунтах с учѐтом их состояния и частотного режима обработки пневмошинными РО. Выявлено, что для суглинистого грунта в недоуплотнѐнном состоянии (ку=0,95), глубина активного распространения виброускорений не
превышает 0,4 м при жесткости рабочего органа с1≈5000 кН/м и частоте 30 Гц, в
плотном состоянии (ку=0, 99) при частоте 40 Гц. Для супесчаного грунта в недоуплотнѐнном состоянии (ку=0, 95) глубина активного распространения виброускорений не превышает 0,6 м при жесткости рабочего органа с 1≈6000 кН/м и частоте
30 Гц, в плотном состоянии (ку=1,0) при частоте 40 Гц.
5. Сравнение результатов теоретических и экспериментальных исследований
подтверждают адекватность математической модели; абсолютная погрешность не
превышает 12 %;
220
6. Предложен критерий, оценивающий относительную энергоэффективность
передачи вибрации, при уплотнении грунтов вибрационными катками с пневмошинными рабочими органами – коэффициент относительной энергоэффективности передачи вибрации кп. Результаты проведѐнных исследований подтвердили
необходимость расширения жѐсткости пневмошинных рабочих органов виброкатков до 5000 – 6000 кН/м.
Производительность вибрационного катка с адаптивным пневмошинным рабочим органом превышает производительность SAKAI GW-750 (Япония) на значения до 30 %;
7. Использование полученных результатов теоретических и экспериментальных исследований позволит решить проблему создания эффективных виброкатков с пневмошинными рабочими органами, стоящих в одном ряду с современными высокопроизводительными вибрационными машинами.
221
6. РЕАЛИЗАЦИЯ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ
Обобщѐнные результаты исследований могут быть выражены в виде следующих практических рекомендаций: в комплексном методическом подходе к
выбору параметров вибрационных катков (в том числе с пневмошинными рабочими органами); разработке конструкций адаптивных пневмошинных рабочих органов вибрационных катков; экономическом анализе и оценке энергоэффективности уплотнения грунтов катками с пневмошинными рабочими органами; рекомендациях по усовершенствованию технологического процесса уплотнения грунтовых слоев насыпей автомобильных дорог и других инженерных сооружений.
6.1. Методика выбора параметров вибрационных катков с пневмошинными
рабочими органами
6.1.1. Методика определения жѐсткости пневмошинных рабочих органов
вибрационных катков
Для обоснования параметров процесса уплотнения грунтов адаптивными
катками необходимо знать жѐсткость рабочих органов таких катков. Если эти
данные отсутствуют, то в этом случае необходимо воспользоваться универсальной методикой определения жесткости рабочего органа по значению коэффициента восстановления [115, 118].
Суть методики заключается в следующем: коэффициент восстановления kвосст
характеризует степень упругости (жесткости) материалов. Схема установки для
определения kвосст любого пневмошинного рабочего органа, способного в широком диапазоне изменять жѐсткость, проиллюстрирована на рисунке 6.1. Установка максимально проста в конструкции и может быть изготовлена даже в полевых
условиях. Валец закреплен неподвижно, груз на подвесе, длиной lв, отклоняется
на угол Q0 = 55°. После соударения груза с вальцом необходимо зафиксировать
угол Q1 отклонения груза после отскока.
222
Рисунок 6.1 – Установка для определения жѐсткости пневмошинных
рабочих органов
В соответствии с положениями теории удара (по В. Н. Тарасову [134]), процесс соударения двух тел начинается с момента соприкосновения крайних их точек, имеющих в этот момент скорости 1 и 2 . Через некоторое время процесс
«сближения» тел прекращается, при этом часть их первоначальной кинетической
энергии переходит в потенциальную энергию деформации (т.е. деформированный
рабочий орган совершает работу силы Гука). После чего потенциальная энергия
упругой деформации переходит в кинетическую энергию тел, при этом они будут
разлетаться со скоростями 11 и 22 . Отклоненный на угол Q0 от вертикали сбрасываемый груз обладает потенциальной энергией U = mгghх, которая после осво-
mг υ12
бождения груза переходит в кинетическую энергию E k =
.
2
223
1 2 g h х 2 g lв (1 cos Q 0 ) 2 g lв sin
Q0
,
2
(6.1)
соответственно
11 2 g h х 2 g lв (1- cos Q1 ) 2 g l в sin
Q1
.
2
(6.2)
При ударе реальных тел механическая энергия также восстанавливается
лишь частично вследствие потерь на образование остаточных деформаций, в нашем случае на работу сил упругости, поэтому относительная скорость до удара
больше относительной скорости после удара:
|1 - 2 | > |11 - 22 |.
(6.3)
Для учета этих потерь вводится такое понятие, как коэффициент восстановления kвосст, равный отношению относительных нормальных скоростей до и после
удара.
kвосст =
11 22
.
1 2
(6.4)
Учитывая, что рабочий орган жестко закреплен и реализуется прямой центральный удар, тогда из формулы (6.4)
Q1
2 .
11
1 sin Q0
2
sin
k восст
(6.5)
Преимущество такого подхода заключается в простоте качественного определения жѐсткости рабочего органа. Чем больше значение kвосст, тем большей жесткостью обладает рабочий орган. Сравнивая с эталонным значением этих характеристик (таблица 6.1, рисунок 6.2.) и используя корреляционную зависимость,
можно количественно определять жѐсткость адаптивных пневмошинных вальцов.
Таблица 6.1 – Сравнительные данные kвосст для опытного образца
224
Коэффициент восстановления kвосст
Жѐсткость РО c1, кН/м
0,61
5400
0,47
4780
0,38
3540
0,19
2100
с1 , кН/ м
6000
4000
2000
0,65
0,55
0,45
0,35
0,25 k восст
Рисунок 6.2 – Зависимость жѐсткости от значения
коэффициента восстановления
В данном случае жѐсткость является функцией от угла отскока и величины
деформации рабочего органа:
c1=f(Q1, Q0, Δхро).
(6.6)
С помощью предложенной методики можно оценить показатели жѐсткости
и вязкости не только предлагаемых рабочих органов дорожных катков, но и реологические характеристики шин специальной строительной и автомобильной техники в производственных условиях.
6.1.2. Обоснование величины контактных напряжений при уплотнении грунтов катками с пневмошинными рабочими органами
225
Обоснование параметров любого уплотняющего средства должно основываться на данных о свойствах и состоянии обрабатываемой среды. В первую очередь необходимо определиться с начальными характеристиками среды и зависимостями их изменения в процессе уплотнения. В нашем случае, для грунтов – это
модуль деформации Е, предел прочности ζпр, жѐсткость с2 и коэффициент вязкого
трения b2, плотность ρ.
Деформативные свойства грунтов широко отражены в теоретических и экспериментальных исследованиях Н. Я. Хархуты, В. Ф. Бабкова, В. М. Безрук, А. К.
Бируля, О. Т. Батракова [8, 9, 22, 23, 26, 31, 35, 36, 134, 143, 147, 148] и др., реологические свойства отражены в трудах С. С. Вялова, Д. Д. Баркана,
Н. А.
Флорина и др. [12, 13, 42, 76, 140].
Для пневмошинных рабочих органов катков отдельным вопросом стоит
обоснование параметров адаптации по энергоэффективности передачи вибрации и
по площади контакта (контактным напряжениям) в зависимости от этапа процесса
уплотнения.
Вследствие того, что на начальном этапе процесса уплотнения сопротивление
материала деформированию невысокое, процесс протекает достаточно интенсивно, даже в статическом режиме. В этом случае уплотнение должно осуществляться при значительной площади пятна контакта, т.е контактные напряжения должны
быть снижены. На заключительном этапе статического действия от массы катка,
как правило, недостаточно, необходимо использовать динамическую составляющую от вибровозбудителя. Контактные напряжения при этом должны быть высокими, как и жѐсткость рабочего органа. Главная проблема здесь заключается в
обосновании правильного соотношения характеристик жѐсткости РО с массой
катка и вибрацией на каждой стадии процесса уплотнения.
Решить эту проблему возможно введением условного понятия эквивалентная
статическая масса Мэкв. Как известно [65], вибрационные катки с металлическими
вальцами по массе, как минимум в 3 раза, эффективнее статических, т.е.
М=1/3·Мэкв. В случае использования пневмошинных катков, данное соотношение
226
действует только тогда, когда жѐсткость рабочего органа идентична жѐсткости
металлического вальца. Выше было отмечено, что это должно происходить на
финальной стадии процесса уплотнения. На начальных стадиях жѐсткость вальцов уменьшается для увеличения площади пятна контакта и снижения контактных напряжений.
В соответствии с проведѐнными исследованиями [104, 105, 112, 114, 116, 119,
120], при уплотнении грунтов необходимо изменять жѐсткость РО в зависимости
от стадии уплотнения (таблица 6.2.).
В первую очередь необходимо определить эквивалентную массу способную
проработать уплотняемый материал на последней стадии уплотнения, когда он
обладает максимальным пределом прочности. Площадь пятна контакта и массу
катка необходимо выбирать в соответствии с требуемыми контактными напряжениями, обеспечивая интенсивное деформирование грунта.
Таблица 6.2 – Значения жесткости рабочего органа на разных стадиях процесса уплотнения
Жѐсткость РО, кН/м
Стадия процесса уплотнения
Несвязанный грунт
Связанный грунт
Начальная, ку=(0,85 - 0,90)
600 - 1000
600 - 1000
Средняя, ку=(0,90 - 0,95)
4000 - 5000
3000 - 4000
Заключительная, ку=(0,95 - 1,0)
6000 - 8000
4000 - 5000
С учѐтом допущения прямоугольной формы пятна контакта и известной ширины вальца, неизвестной величиной является длина контакта d, изменяемая в
процессе уплотнения.
Зависимость параметра контакта d от жѐсткости пневмошинного РО катка
можно определить по эмпирической формуле, полученной по результатам экспериментальных исследований [103, 118].
d 17,91c10,5962 ,
где с1 – жѐсткость РО, кН/м.
(6.7)
227
Определим необходимую массу катка для проработки грунта на заключительной стадии уплотнения, с учѐтом использования вибрации и максимальных
контактных напряжений:
M
пр
g
Ld
(6.8)
где M - необходимая статическая масса катка, кг; ζпр – предел прочности грунта
(при ку=1,0), Н/м2; L – ширина рабочего органа, м; d – продольный параметр пятна
контакта, м (продольная длина пятна контакта на жѐстком основании); g – ускорение свободного падения, м/с2.
Далее
необходимо
проверить
статическую
массу
по
условию
т (t) пр (t) на контактные напряжения в начале процесса уплотнения, когда
грунт обладает низким пределом прочности.
Mg/dL.
(6.9)
Контактные напряжения не должны превышать предела прочности грунта в
начале процесса уплотнения. Предложенный подход позволяет рассчитать массу
катка и определить контактные напряжения на разных этапах уплотнения грунтов.
6.1.3. Обоснование параметров вибрации катков с пневмошинными
рабочими органами
Существующие методики выбора вибрационных параметров для классических виброкатков с металлическими вальцами не могут в полной мере удовлетворять обоснованию параметров катков c рабочими органами, изменяющими свою
жѐсткость в процессе уплотнения грунтов.
Зная массу и жѐсткость РО (п.п. 6.1.1., 6.1.2.), необходимо обосновать вынуждающую силу вибровозбудителя, частоту колебаний, момент дебалансов. Рациональные значения величин этих параметров также должны быть связаны с со-
228
стоянием и свойствами уплотняемого грунта. При определении эффективных режимов работы виброкатков, процесс деформации грунта можно рассматривать
как деформацию квазиупругой системы, которая характеризуется собственной
частотой колебаний (рисунок 6.3) [3, 51 – 55, 103, 104, 123].
0
c2
,
m
(6.10)
где c2 – жесткость некоторого объѐма грунта, активно взаимодействующего с рабочим органом; m – масса грунта, активно взаимодействующая с рабочим органом.
Масса грунта m может определяться как произведение плотности на объѐм
грунта, который активно взаимодействует с РО катка [28]:
m V ,
(6.11)
3
где m - масса грунта, кг; - плотность грунта, кг/м ; V - объем грунта, колеблю-
щийся в пределах активной зоны, м3.
229
с1
b1
M
F(t)
0
SS
h0
m
Рисунок 6.3 – Схема для обоснования параметров виброкатков
Вынуждающая сила вибровозбудителя при уплотнении грунта должна преодолеть силу инерции движения активной массы грунтовых частиц [54].
F0 VAк02 ,
(6.12)
где ρ – плотность грунта, кг/м3; V – объѐм деформируемого грунта, м3; ω0 – необходимая частота колебаний вынуждающей силы вибратора, с-1; Ак – амплитуда
колебаний, м.
Вынуждающая сила (6. 12) должна преодолеть сцепление частиц грунта С, Н;
силу инерции уплотняемой массы mg , Н; силу внутреннего трения грунта Rtg ,
Н.
Поэтому запишем
VAк2 CS m g tg ,
(6.13)
где С –сцепление грунта, Н/м2; S – площадь контакта, м2; m g /S – контактные напряжения, Н/м2; θ – угол внутреннего трения грунта; m –масса уплотняемого грунта, кг; g – ускорение свободного падения, м/с2.
230
Таблица 6.3 – Характеристики грунтов в зависимости от их консистенции
Консистенция
грунта
Глина
Суглинок
Супесь
г,
,
С,
г,
,
С,
г,
,
С,
кН/м3
град
Н/м2
кН/м3
град
Н/м2
кН/м3
град
Н/м2
Твѐрдая
21,5
22
100000 21,5
25
60000 20,5
28
20000
Полутвѐрдая
210
20
60000
21,0
23
40000 20,0
26
15000
Тугоплас-я
20,5
18
40000
20,0
21
25000 19,5
24
10000
Мягко-
19,5
14
20000
19,0
17
15000 19,0
20
5000
19,0
8
10000
18,5
13
10000 18,5
18
2000
18,0
6
5000
18,0
10
5000
14
0
пластичная
Текучепластичная
Текучая
18,0
В случае обоснования параметров катка с изменяемой жѐсткостью рабочего
органа, рациональная амплитуда колебаний определится в соответствии с отношением по Е. М. Куприянову, С. В. Жирковичу, Н. И. Наумец [54]:
Aк
m д rд
,
mд M
(6.14)
где М – масса, приходящаяся на рабочий орган, кг; m –масса дебаланса вибровозбудителя, кг; – эмпирический коэффициент, характеризующий снижение амплитуды колебаний вальца по сравнению с амплитудой вибровозбудителя за счѐт
инерционных и диссипативных сил, =0,025 [54].
Преобразуем выражение (6.14), разделив обе его части на ρ, и заменим Ак
выражением (6.14):
m д rд
2 CS/ V m g / V Stg / V .
m д 0,025 M
(6.15)
Отсюда получим
mд rд2
CS m g S tg
(mд M) . (6.16)
V
Заметим, левая часть выражения (6.16) является вынуждающей силой вибровозбудителя, которая зависит от свойств уплотняемого грунта и известных технических параметров вальца. Величина вынуждающей силы должна превышать зна-
231
чение правой части этого неравенства, но не должна превышать значения предела
прочности уплотняемого материала пр. Поэтому запишем:
прS F0
CS m g S tg
(mд M) .
V
(6.17)
При известной величине вынуждающей силы и еѐ частоте колебаний, можем
определить необходимый момент дебалансов:
F0 mд rд2 .
(6.18)
mд rд F0 / 2 .
(6.19)
Отсюда
Частота приложения вынуждающей силы должна соотноситься с поступательной скоростью движения катка и параметрами контакта, чтобы обеспечивалось время, необходимое для количества повторностей приложений нагрузки, с
учѐтом заданной плотности.
Время, необходимое для уплотнения грунтов, определяется [147] как
t Cп / ,
(6.21)
где Сп – число повторностей приложения силы при вибрировании, необходимое
для достижения заданной плотности, Сп=(1,5 - 5)×103 (по Н. Я. Хархуте);
ω – частота колебаний, мин-1.
Используя уравнение (3.30) и преобразуя уравнение (6.21), получим необходимую частоту приложения вынуждающей силы
f (6,75 22,41) / d ,
(6.22)
где f – частота колебаний, Гц; d – параметр контакта, м; υ – скорость катка, необходимая для достижения заданной плотности грунта за один условный проход,
км/ч.
232
6.1.4. Обоснование рациональной скорости вибрационных катков
с пневмошинными рабочими органами
Рациональная скорость катка определяется временем, необходимым для достижения необходимого коэффициента уплотнения при виброобработке грунта, с
учѐтом изменения его свойств в процессе уплотнения. В нашем случае также необходимо учитывать свойства рабочего органа. Подобный подход для определения рациональной скорости движения катка был реализован
С. В.
Жирковичем, Н. И. Наумец [54].
0,37 d
EL
,
M
(6.21)
где d –длина дуги контакта, м; Е – модуль деформации грунта, Па; L – ширина рабочего органа катка, м; M – масса, приходящаяся на рабочий орган, кг.
Данная формула позволяет с достаточной достоверностью рассчитывать рациональную скорость статических катков с металлическими вальцами, поэтому в
случае использования вибрационных адаптивных рабочих органов, необходимо
учитывать изменения параметров контакта и величины статической нагрузки
вследствие изменения жѐсткости вальца и эффекта от применения вибрации.
Изменение параметра контакта d от жѐсткости РО можно определить согласно эмпирической формуле (6.7), а статическая масса определится по увеличению
уплотняющего эффекта от использования вибрации в соответствии с рекомендациям Н. Я. Хархуты, Я. А. Калужского [63]. С учѐтом жесткости РО, формула
(6.21) запишется в следующем виде:
0,37 17,91 c10,5962
EL
EL
6,62 c10,5962
M
M
(6.22)
Данная зависимость позволяет определить рациональную скорость катка при
уплотнении грунтов на каждом этапе укатки с учѐтом изменяющихся свойств обрабатываемого материала.
233
Практическое применение методики обоснования параметров вибрационных
катков, приведѐнное в данном пункте, проиллюстрировано в приложении 4.
Использование предложенной методики для обоснования параметров вибрационных катков с пневмошинными рабочими органами позволяет выбрать их рациональные параметры, с учѐтом свойств и состояния уплотняемых грунтов, повысить производительность работ, снизить энерго- и трудозатраты, улучшить
технологию организации работ.
6. 2. Разработка перспективных конструкций пневмошинных рабочих органов вибрационных катков
Многообразие факторов, влияющих на интенсивность уплотнения грунта, ограничивает возможности современной уплотняющей техники, как правило, приходится совмещать несколько машин в одной технологической операции для достижения необходимого результата. С учѐтом факторов, влияющих на интенсивность уплотнения грунтов в различных условиях, встаѐт вопрос о возможности
разработки и применения перспективных конструкций уплотняющих рабочих органов дорожных катков, способных адаптироваться к изменению свойств и состояния материала и эффективно работать на различных грунтовых средах, независимо от этапа их обработки.
Сделан вывод, что использование пневмошинных катков как вибрационных
ограничивается в основном значительной демпфирующей способностью воздуха
в шинах, а вибрационная техника не способна в достаточном диапазоне регулировать контактные давления. Поэтому основной задачей для повышения интенсивности обработки грунтов вибрационными катками является выявление возможности регулировки контактных напряжений в широком диапазоне, за счѐт расширения диапазона жѐсткости пневмошинных органов и обеспечения энергоэффективной вибрационной обработки грунтовой среды.
Предложенное решение задачи ставит непосредственный вопрос о выборе
конструкции и параметров адаптивных рабочих органов таких катков.
234
6. 2. 1. Вибрационный гидрошинный рабочий орган катка
Конструкция вибрационного гидрошинного рабочего органа предполагает
заполнение пневматических шин жидкостью, которая является «несжимаемым»
телом и увеличивает жѐсткость рабочего органа. Жѐсткость РО может изменяться
за счѐт изменения внутреннего давления жидкости в шинах [102, 112]. Теоретические и экспериментальные исследования пневмошинных катков показали, что количество шин, расположенных на одной оси, определяют величину напряжения,
возникающего в уплотняемом материале, а следовательно, и степень его уплотнения. Очевидно, что и при разработке вибрационного гидрошинного катка можно
использовать эти положения.
Исследования Н. А. Островцева, П. Л. Сурье [83, 131] зависимостей изменения максимальных напряжений max, возникающих в уплотняемом слое на глубине h при различном расстоянии между шинами е (рисунок 6.6, а), показывают, что
интенсивное приращение напряжений max происходит при увеличении количества шин до трѐх. Здесь е дано в долях от ширины площади контакта шины a, напряжения – в долях от среднего контактного напряжения шины с уплотняемым
материалом .
Это подтверждают изложенные ранее положения, о том, что глубина проработки грунта и значения напряжений в слое зависят не только от величины внешней силы, но и от параметров контакта. Для пневматических шин это ещѐ более
актуально, поскольку при увеличении расстояния между шинами область концентрации напряжений уменьшается.
Количество шин на одной оси оказывает также существенное влияние на величину средних по ширине уплотняемой полосы напряжений. Зависимость напряжений от количества шин имеет экспоненциальный характер (рисунок 6.4, б),
аналогичный для различных толщин уплотняемых слоѐв.
235
1
4
8
6
5
3
7
2
1 – валец; 2 – шины заполненые жидкостью; 3 – торцевые посадочные диски;
4 – стягивающие брусья; 5 – муфта; 6 – гидромотор привода вибратора;
7 – вибратор; 8 – торцевые диски
Рисунок 6. 4 – Схема рабочего органа вибрационного гидрошинного
катка с внутренним расположением вибровозбудителя
Эти положения указывают на то, что, с точки зрения эффективности уплотнения, количество шин на оси вибрационного катка не должно быть менее трѐх, а
их оптимальное число должно определяться технологическими факторами процесса уплотнения и технико-экономическим анализом.
Из вышесказанного следует вывод: для получения рационального воздействия на уплотняемые слои материала вибрационным гидрошинным катком шины
на нѐм должны располагаться на минимальном расстоянии друг от друга, т. е., по
возможности, должны плотно соприкасаться боковыми поверхностями.
Грунт под таким вальцом будет испытывать наиболее равномерное напряжение. Такая схема позволяет избежать деформации торцевых поверхностей шин
236
при динамическом воздействии жидкости на них, тем самым увеличивая интенсивность передачи вибрации частицам материала через площадь контакта [83].
max
ср
0,4pw
0,1pw
e
e
e
e
0,2pw
e
e
e
0,075pw
Напряжения
Напряжения
e
e
e
e
e
e
e
0,05pw
0,025pw
0
1
2
3
4
Количество проходов n
5
0
а)
1
2
3
4
Количество проходов n
5
б)
Рисунок 6.6 – Зависимость величины максимальных (а) и средних
(по ширине уплотняемой полосы) (б) напряжений от числа шин при различном расстоянии между ними
Отметим, что, при различном конструктивном исполнении рабочего органа,
вибратор можно располагать как внутри вальца (рисунок 6.5), так и на его раме
(рисунок 6.7). Следует сказать, что первый вариант целесообразнее использовать
как отдельный валец, входящий в конструкцию катка, а второй вариант в качестве
– прицепного катка.
Помимо конструктивной схемы катка, для наиболее эффективного протекания процесса уплотнения, необходимо правильно подбирать параметры и режимы
уплотнения.
При выборе шин для вибрационного гидрошинного катка следует, кроме требований, предъявляемых к пневматическим шинам катков статического действия,
руководствоваться дополнительными требованиями, вытекающими из особенно-
237
стей работы в условиях динамических нагрузок. Необходимо использовать пневматические шины с небольшими гистерезисными потерями (более 5105Н/м).
Этим требованиям удовлетворяют, в частности, шины 15,00–20 [38, 102]. В наибольшей мере отвечают указанным требованиям шины авиационного типа (таблица 6.4.).
1
2
3
5
4
6
1 – валец; 2 – рама; 3 – шины заполненные жидкостью; 4 – торцевые диски; 5 – ось вальца; 6- привод вибровозбудителя
Рисунок 6.7 – Схема рабочего органа вибрационного гидрошинного катка с
расположением вибратора на его раме
Рекомендации по выбору шин. Поскольку основной частью рабочего органа
предложенного катка являются шины, заполненные жидкостью (гидрошины), необходимо выбрать их типоразмер.
238
Таблица 6.4 – Характеристики шин авиационного типа
Тип
Модель
шины
шины
930х305
10А
660х200
11А
930х305
10А
800х225
12А
930х305
14А
800х225
12А
950х300
2А
840х290
Посадоч.
Изгот-ль
Масса ши-
диаметр,
нагрузка,
ние без на-
мм
Н
грузки, МПа
+
404,8
55820
0,882
37,3
+
333,5
20600
0,882
16,8
+
404,8
75540
0,932
37,3
+
406
51010
0,981
24,9
+
404,8
78480
0,981
37,3
+
406
53960
1,03
24,9
КШЗ,ЯШЗ
-
467
78480
1,079
47
3А
ЯШЗ
-
359
55000
0,981
32
950-350
11А
ЯШЗ
+
449,5
0,490
34,5
700х250
6А
БШЗ,ЯШЗ
+
354,5
0,294
16,6
БШЗ,ЯШЗ
КШЗ
БШЗ,ЯШЗ
КШЗ
БШЗ,ЯШЗ
КШЗ
БШЗ,ЯШЗ
КШЗ
БШЗ,ЯШЗ,
КШЗ
БШЗ,ЯШЗ
КШЗ
Камера
Статич. Рабочее давле-
47090
(4800)
15450
ны, кг
Система подачи жидкости и воздуха в шины катка. Для создания внутреннего давления мы используем жидкость, которая будет передавать энергию вибровозбудителя уплотняемому грунту, поэтому каток должен иметь систему подачи жидкости или воздуха в шины [105, 112].
Очевидно, что система централизованной подкачки шин, используемая в современных пневмокатках, не совсем отвечает требованиям, предъявляемым к подобной системе у вибрационного гидрошинного катка. В то же время за основу
системы подачи жидкости в колѐса катка была взята именно эта система, поскольку данный каток может работать и как пневматик, а также для большей
унификации агрегатов нового катка с агрегатами уже производимых катков.
239
Система подачи жидкости или воздуха состоит из следующих элементов: водяной насос, бак для воды, магистрали, краны.
Принцип действия: при подаче воды в колѐса необходимо предварительно
выкачать из них воздух, для этого служит компрессор. Для облегчения операции
заполнения шин водой колеса заполняются посекционно. При помощи блока кранов БК закрываем воздушную магистраль таким образом, чтобы сначала откачать
воздух из двух внешних колѐс, внутренние колеса являются опорными, при этом
кран магистрали подачи жидкости К1 закрыт. Заполняя колеса водой, перекрываем воздушную магистраль краном К2, открываем кран К1 и краны блока БК, соответствующие внешним колѐсам. Жидкость под давлением, создаваемым насосом НВ, из бака Б идѐт по гидролиниям в шины.
После заполнения двух внешних колѐс повторяем операцию с внутренними
колѐсами и заполняем их жидкостью.
ВС
БВ
К
НВ
К2
К1
БК
БВ – бак водяной; БК – блок кранов; ВС – воздухосборник; К1, К2 – краны;
К – компрессор; НВ – насос водяной
Рисунок 6.8 – Схема заполнения гидрошин жидкостью и воздухом:
240
Каток может быть и пневматиком, если посекционно откачать воду из колѐс и
накачать их воздухом с помощью этой же установки (рисунок 6.8).
Следует отметить, что при откачке воздуха из колеса через стандартный
штуцер камера внутри покрышки «сплющивается» достаточно легко, поэтому для
создания отрицательного давления в шине не требуется мощного компрессора, и
основные энергозатраты пойдут на создание необходимого давления жидкости
насосом НВ.
Проведѐнные исследования показали, что данная схема заполнения колѐс
жидкостью или воздухом работоспособна, но основная проблема состоит во временном диапазоне заполнения колеса жидкостью. Поскольку стандартные штуцера имеют довольно малое проходное сечение по сравнению с внутренним объѐмом шин, поэтому рекомендуется использовать пневмовальцы с бескамерными
шинами, и тогда в колеса можно устанавливать нестандартные штуцера большего
диаметра.
6.2.2. Пневмошинный рабочий орган катка с металлическими бандажами
Рассмотрим вибрационный пневмошинный рабочий орган, в котором необходимая жѐсткость пневматических шин обеспечивается металлическим каркасом. Применение металлического каркаса позволяет максимально, по жѐсткости,
приблизить пневмовалец к металлическому вальцу. Появляется возможность эффективного использования вибрации [111].
Рабочий режим катка с автоматической системой обеспечения жѐсткости
может осуществляться следующим образом. На первых этапах уплотнения замки
7 каркасных полурам 6 разжаты и не касаются поверхности шин 3, т.е. каток работает в обычном режиме, при котором контактные давления регулируются изменением давления внутри шин. На заключительном этапе, когда уплотняемый материал набрал определѐнную прочность и для его дальнейшего уплотнения необходимо создавать высокие контактные давления, дополнительная рама 5 «раскрывается» полурамами 6 вокруг оси 4 вальца 1, замки 7 прижимают полурамы 6
241
вплотную к шинам при максимальном внутреннем давлении в них. Таким образом, шины и каркасная дополнительная рама объединяются в жѐсткую конструкцию, которая обеспечивает высокие контактные напряжения и возможность эффективного применения вибрации в конце укатки.
1 – валец; 2 – основная рама; 3 – набор шин; 4 – ось; 5 – дополнительная рама;
6 – каркасная полурама, 7 – замок (электромагнитный, пневматический,
гидравлический или др.)
Рисунок 6.9 – Рабочий орган катка с изменяющейся жѐсткостью
Рекомендации по выбору шин. Данные рекомендации аналогичны тем, что
были приведены при обосновании вибрационного гидрошинного катка, с тем отличием, что у данной конструкции в вибрационном режиме нагрузка на шины будет несколько снижена, т.к. динамическая нагрузка вибровозбудителя будет частично восприниматься металлическим каркасом. Требования к шинам в этом случае можно несколько снизить, и использовать стандартные шины, применяемые
для пневматиков, в частности [38, 29], по своим характеристикам подходят шины
типа Ф-10А (таблица 6.5).
Обоснование бандажей. Основным элементом, обеспечивающим повышенную жѐсткость пневматических шин, в данном случае являются бандажи, которые
могут быть как элементом автоматической системы обеспечения жѐсткости (рисунок 6.9), так и съѐмными элементами, монтирующимися на валец вручную (рисунок 6.11).
242
Рисунок 6.10 – Съѐмный бандаж для обеспечения жѐсткости пневмовальца
Таблица 6.5 – Характеристики шины Ф-10А
Тип
Размер шины
Исполнение:
TT – камерное
TL – бескамерное
Тип рисунка протектора
Обода рекомендуемые
Ширина профиля, мм
Обода допускаемые
Ширина профиля, мм
Максимальная допустимая нагрузка, индекс
Максимальная допустимая нагрузка, кг
Внутреннее давление, кПа
Максимальная скорость, индекс
Максимальная скорость, км/ч
Одинарная (О) спаренная (S)
14.00-20
ТТ
Гладкий
10.0
375
8.5
375
159
4300.0
400-800
A4
20
O
Основной особенностью этих элементов должна быть их относительно небольшая толщина, т.к. жѐсткость приведѐнной конструкции обеспечивается не
243
жѐсткостью самих бандажей, а способностью металлических элементов сопротивляться усилиям на растяжение. Здесь имеется в виду эффект велосипедного
колеса, когда спицы являются тонкими металлическими стержнями и, конечно
же, должны сгибаться под действием веса человека, но в велосипедном колесе
всегда работают спицы, находящиеся в его «верхней части», и на них действуют
растягивающие усилия, которым они хорошо сопротивляются. Подобного эффекта необходимо достичь и в данной конструкции.
Бандажи для этого должны быть расположены симметрично относительно
осей вальца (рисунок 6.11.).
Рисунок 6.11 – Жѐсткий пневмошинный рабочий орган катка
Количество бандажей необходимо выбирать из условия получения максимальной жѐсткости вальца при их минимальном количестве.
С точки зрения совершенствования технологического процесса уплотнения,
операции по установке и снятию бандажей должны занимать минимальное время.
Поэтому для пневмошинного рабочего органа катка с металлическими бандажами
было разработано устройство автоматического регулирования жѐсткости (рисунок
6.13). Принцип его действия заключается в том, что бандаж выполняется разрезным (рисунок 6.12). Части бандажа соединяются пружиной 3, внутри пружины
протягивается металлический трос 5, один конец которого крепится к торцевым
концам 1 части бандажа, а второй конец крепится на натягивающий шкив 6, расположенный на раме или оси вальца. Система привода натяжения состоит из ре-
244
дуктора 8 и двигателя 7 (электро- или гидромотор), и натяжного шкива 6. Таким
образом, на начальной стадии процесса уплотнения, когда необходимо большое
пятно контакта и невысокая жѐсткость рабочего органа, трос 5 расслаблен, и бандажи за счѐт пружин деформируются вместе с шинами. На конечных стадиях
процесса, когда необходима высокая жѐсткость рабочего органа для снижения
диссипации энергии вибровозбудителя, давление в шинах увеличивается, а бандажи натягиваются за счѐт наматывания троса 5 на натяжной шкив 6 при помощи
привода. Включение приводного мотора 7 может осуществляться нажатием кнопки из кабины оператора катка и займѐт минимальное время.
Рисунок 6.12 – Бандаж разрезной для устройства, регулирующего
жѐсткость рабочего органа
245
1
3
2
5
7
8
6
4
Рисунок 6.13 – Устройство для регулирования
жѐсткости вальца
6.2.3. Виброимпульсный пневмошинный рабочий орган катка
В данной конструкции источником колебаний являются пневматические шины, обладающие упругими свойствами, которые периодически «сжимаются» специальным устройством, а «разжимаются» за счѐт собственных упругих сил (рисунок 6.14.) [110].
Рабочим органом данного катка является пневмовалец 1, который содержит
основную раму 2 и набор упругих оболочек (шин) 3. На основной оси 4 вальца
крепится дополнительная шарнирная рама 5, поверхность соприкосновения которой с шинами 3 состоит из свободно вращающихся роликов 8, закреплѐнных на
осях 9 в каркасе 6, состоящем из двух частей, скреплѐнных посередине шарниром
7, концы каркаса связаны вибрационным устройством 10. При работе катка охватывающая шарнирная рама 5 с помощью вибрационного устройства 10 периодически «сжимает–разжимает» упругие оболочки (шины) 3, заставляя их испыты-
246
вать деформацию, под направленным воздействием которой уплотняемый материал испытывает динамические нагрузки. Угол приложения динамических виброимпульсов регулируется углом поворота шарнирной рамы 5 относительно вальца
1.
v
7
9
8
6
4
5
2
10
1
3
Рисунок 6.14 – Виброимпульсный пневмошинный рабочий орган
с альтернативным возбуждением вибрации
Принцип действия. Работа вальца осуществляется следующим образом. При
движении катка рабочим ходом дополнительная шарнирная рама 5 под действием
вибрационного устройства 10 периодически «сжимает–разжимает» упругие оболочки (шины), которые деформируясь в определѐнном направлении (направление
деформации выбирается поворотом дополнительной шарнирной рамы 5 относительно оси 4 вальца 1), передают вибрационные импульсы уплотняемому материалу, т. е. при любом давлении и типе рабочего тела внутри шины имеется возможность эффективно уплотнять дорожно-строительные материалы не только за
счѐт статического воздействия от массы катка, но и направленного вибрационного
воздействия.
Дополнительная шарнирная рама должна плотно прилегать к определѐнному
сегменту поверхности вальца с целью уменьшения лишних потерь виброимпульсов. При сжатии шины специальным устройством (электромагнитное, пневмати-
247
ческое, гидравлическое и т. п.) еѐ деформация, а значит, и дополнительное воздействие на уплотняемую поверхность, происходит в определѐнном направлении,
изменяя амплитуду вибрационного устройства (амплитуду сжатия шины); имеется возможность изменения интенсивности воздействия и времени контакта на уплотняемый материал без изменения давления внутри шин. В данном вальце пневмошины способны передавать динамические импульсы без ощутимых потерь независимо от типа рабочего тела внутри них, даже при небольших давлениях. Данная конструкция позволяет снизить эффект «волнообразования» в уплотняемом
материале при правильно выбранном угле приложения виброимпульсов, за счет
поворота дополнительной шарнирной рамы относительно оси вальца на определѐнный угол.
Рекомендации по выбору шин. В данной конструкции пневматические шины
испытывают максимальные нагрузки, поэтому к их характеристикам необходимо
предъявлять наиболее высокие требования, которым отвечают именно шины
авиационного типа (таблица 6.6) с небольшими гистерезисными потерями при
деформации.
Таблица 6.6 – Характеристики шин авиационного типа
Тип
Модель
шины
700х250
6А
720х310
5А
930х305
10А
930х305
10А
930х305
14А
930х305
14А
Посадоч. Статич.
Изг-ль
БШЗ,
ЯШЗ
ЯШЗ
БШЗ,ЯШ
ЗКШЗ
БШЗ,ЯШ
ЗКШЗ
БШЗ,ЯШ
ЗКШЗ
БШЗ,ЯШ
ЗКШЗ
Рабочее давле-
Камера диаметр, нагрузка, ние без нагрузки,
Масса шины, кг
мм
Н
МПа
+
354,5
16190
0,392
16,6
+
246,2
31590
0,490
21,1
+
404,8
62290
0,882
37,3
+
404,8
31100
0,589
37,3
+
404,8
67220
0,882
37,3
+
404,8
33340
0,589
37,3
248
6.2.4. Кулачковый пневмошинный рабочий орган дорожного катка
Кулачковые катки эффективны на связанных глинистых грунтах, контактные
напряжения у таких катков саморегулируются за счѐт глубины погружения кулачков. Как показал практический опыт, этого недостаточно для осуществления
полного цикла процесса уплотнения. Ещѐ одним минусом можно назвать недостаточную ровность поверхности после работы классических кулачковых катков.
Суть конструкции заключается в том, что валец (рисунок 6.15) выполнен в виде
металлической обечайки, которая имеет отверстия с подвижными кулачками и
систему регулировки степени выдвижения кулачков, с целью обеспечения широкого диапазона регулировки контактных давлений и ровности поверхности вальца.
1 – валец; 2 – обечайка; 3 – кулачки; 4 – пневматические шины
Рисунок 6.15 – Кулачковый адаптивный пневмошинный рабочий орган
Принцип работы заключается в следующем: на начальной стадии уплотнения, когда необходимы низкие контактные давления, давление воздуха в шинах 4
снижается, кулачки 3 втянуты «вровень» с обечайкой вальца 2, поэтому площадь
контакта максимальна, а контактные давления соответственно минимальны. По
мере увеличения прочности материала, для продолжения процесса его уплотнения
249
необходимо повышать контактные давления, что осуществляют повышением давления в пневмошинах 4, которые, увеличиваясь в объѐме, «выталкивают» кулачки
3 наружу, уменьшая поверхность контакта и увеличивая контактные давления.
Если же на финальной стадии уплотнения необходима высокая ровность обрабатываемой поверхности, то снижая давление в пневмошинах 4, кулачки 3 «втягиваются» и последние проходы выполняют в режиме гладковальцового катка.
Проведѐнные исследования позволили запатентовать (приложение 5) и
предложить к внедрению (приложение 6) ряд конструкций рабочих органов дорожных катков, которые способны к широкой адаптации своих параметров как по
контактным напряжениям, так и по параметрам вибрации в зависимости от состояния и свойств обрабатываемого грунта. Очевидно, что данные способности
позволяют выделить новую категорию адаптивных дорожных катков, что приводит к необходимости усовершенствования существующей классификации уплотняющей техники разработанной, проф. В. Б. Пермяковым, проф. А. В. Захаренко и
др. Усовершенствованная классификация уплотняющей техники представлена на
рисунке 6.16.
250
Уплотняющие машины
1.1 Непрерывный
1. Контроль
характеристик
материала в процессе
уплотнения
Уплотняющие средства всех типов с
бортовыми , или автономными средствами
контроля (катки, виброплиты, трамбующие
машины, асфальтоукладчики)
1.2 Эпизодический
2.1 Саморегулирование от прохода
к проходу
2.2 Саморегулирование за один
проход на протяжении контакта
рабочего органа с материалом
2. Регулирование
уплотняющих
давлений
2.3 Принудительное
ступенчатое от прохода к
проходу
Каток с прерывистой рабочей
поверхностью, с бочкообразным вальцом
ОАО«Раскат»
Каток однопроходного уплотнения
Лѐгкие, средние, тяжѐлые статические и
вибрационные катки, виброплиты,
трамбующие машины
2.4 Принудительное
непрерывное от прохода к
проходу
3. Увеличение
времени
взаимодействия
(контакта)с
уплотняемым
материалом
3.1 Применение
недеформирующегося рабочего
органа значительной
протяжѐнности
Каток с пневмовакуумным балластным
устройством, пневмошинный каток с
широким интервалом регулирования
давления в шинах (на авиационных
шинах)
Вибро- и выглаживающие плиты
3.2 Применение
деформирующегося рабочего
органа
Пневмошинные катки
Применение адаптивных
рабочих органов
4.1 Управление режимами
оптимальных температур и
влажности
Гидрошинный вибрационный каток
ОАО «Раскат», виброимпульсный
каток, вибропневмошинный каток с
бандажами, пневморегулируемый
кулачковый каток
Уплотняющие средства всех типов
4. Минимизация
сопротивления
деформированию
уплотняемых
материалов
4.2 Вибрационное воздействие
4.3 Учѐт анизотропных свойств
уплотняемых материалов
4.4 Учѐт реологических свойств
уплотняемых материалов
Вибрационные плиты, катки,
гидрошинный вибрационный каток
Материалоукладчик с наклонно
расположенным трамбующим брусом,
самоходные виброплиты, катки с
направленной вибрацией и перекосом
вальцов
Уплотняющие машины импульсного
действия
5. Дополнительное
касательное силовое
воздействие на
уплотняемый материал
5.1 С использованием статического
касательного усилия
Каток с прерывистой рабочей
поверхностью
5.2 С использованием импульсного
касательного усилия
Катки осциллирующие, нутирующие
Dynapac, НАММ
Рисунок 6. 16 – Уточнѐнная классификация уплотняющей техники
251
6. 3. Технологические рекомендации по уплотнению грунтов вибрационными
катками с пневмошинными рабочими органами
Земляное полотно является конструкцией, которая сооружается в несколько
слоев и работает в сложных эксплуатационных условиях. Качество уплотнения
земляного полотна влияет не только на устойчивость грунтовой насыпи, но и на
долговечность и работоспособность устроенных на ней дорогостоящих дорожного основания и одежд. В настоящее время строительные нормативные документы
рекомендуют уплотнение грунтовых слоѐв, как минимум двумя типоразмерами
дорожных катков, что усложняет технологию уплотнения и увеличивает длительность технологических операций. Проведѐнные исследования по уплотнению
грунтов катками с адаптивными пневмошинными рабочими органами подтвердили возможность уплотнения грунтовых слоѐв до нормативной плотности одним
катком. Это положительно скажется на энергоѐмкости, металлоѐмкости, трудоѐмкости и в целом на себестоимости производства работ.
С использованием результатов диссертационных исследований были разработаны рекомендации по уточнению стандартных технологий уплотнения грунтов
катками с адаптивными пневмошинными рабочими органами.
Плотность грунта в свежеотсыпанном состоянии во многом обусловлена ранее выполненными операциями по разработке и отсыпки грунтовых слоѐв. В таблице 6.7 [86, 87] приведены ориентировочные значения коэффициента уплотнения при возведении насыпей различными строительными машинами. Согласно
представленным данным, наиболее предпочтительно устройство земляного полотна скреперами или автосамосвалами, в этом случае наблюдается наибольшая
начальная плотность свежеотсыпанного грунта, а значит, снизятся затраты на
операцию уплотнения.
Исходная влажность грунтов при уплотнении оказывает большое влияние не
только на величину достигаемой плотности, но и на прочность, долговечность и
водоустойчивость всей автомобильной дороги. При замерзании и оттаивании
грунтов, уплотнѐнных при влажности меньше оптимальной, их деформации будут
252
больше, чем у тех же одинаково уплотнѐнных грунтов, но при влажности, близкой
к оптимальной.
Таблица 6.7 – Характеристики грунтов от вида применяемой техники
Машины, применяемые
для возведения насыпей
Грейдеры-элеваторы
Состояние грунта
Относительная
Модуль деформации
плотность грунта
грунта, МПа
0,75-0,80
1-2
Очень рыхлый и
рыхлый
Бульдозеры
Недоуплотнѐнный
0,80-0,85
2-8
Автосамосвалы
Недоуплотнѐнный
0,85-0,90
4-10
0,90-0,92
10-12
и почти плотный
Скреперы
Почти плотный
Ориентировочные значения оптимальной влажности для основных категорий
грунтов составляют, %: песчаных – 8-12; супесчаных – 9-15; тяжѐлых суглинков –
15-22; пылеватых суглинков – 17-23; глинистых – 18-25 [44, 86].
Рекомендуемая начальная влажность должна быть несколько ниже оптимальной (на 5% - 10%), хотя это и усложнит процесс уплотнения, но тогда в
плотном теле насыпи естественное удаление влаги (высыхание) не приведѐт к некоторому снижению прочности грунтового сооружения.
При влажности грунта выше рекомендуемого значения, необходимо принять
меры к его подсушиванию, при низких значениях влажности, его необходимо увлажнять из поливомоечных машин.
Потребное количество воды для дополнительного увлажнения 1 м 2 уложенного слоя грунта ориентировочно определяется по формуле [86]:
Ж h0
где
W0 W
,
110
(6.25)
– плотность грунта, т/м3; h0 – толщина отсыпаемого слоя, м; Wопт, W – со-
ответственно оптимальное и текущее значение влажности, %.
Значение рациональной толщины слоя для катков может быть получено из
253
формул [32, 44, 139, 147].
В соответствии с проведѐнными исследованиями, рекомендуемая толщина
слоя для несвязанных грунтов соотносится со значениями, рекомендуемыми для
классических виброкатков, а толщина слоѐв несвязанных грунтов должна быть
уменьшена на 10 - 20 %.
Для адаптивных катков массой от 9 т, рассматривается технологическая схема уплотнения материала от свежеотсыпанного состояния до нормативной плотности, соответствующей коэффициенту уплотнения 1,0 на несвязанных грунтах и
0,99 – на связанных.
Ориентировочно значения толщины уплотняемого слоя в рыхлом состоянии
и число проходов уплотняющих машин по одному следу рекомендуется назначать
по таблице 6.8.
Таблица 6.8 – Толщина слоя и количество проходов для катков
с пневмошинными рабочими органами
Толщина слоя, см
Уплотняющие средства
Адаптивный прицепной 3 т
(F0=50 - 85 кН, f= 30 – 40 Гц)
Адаптивный самоходный 9 т
(F0=50 - 100 кН, f= 30 – 40 Гц)
Количество проходов
Связанные
Несвязанные
Связанные
Несвязнные
грунты
грунты
грунты
грунты
30-40
50-60
3-4
4-6
40-50
50-70
9-11
5-7
Уплотнение грунтов следует производить при рациональном скоростном режиме работы катков. Катки с адаптивными рабочими органами, в отличие от
классических вибрационных катков, способны регулировать время приложения
нагрузки от прохода к проходу, изменяя параметры контакта. Поэтому для таких
катков может существовать два технологических подхода: с изменением скорости
движения катка от прохода к проходу и с постоянной скоростью на всех проходах
с изменением реологии рабочих органов. Рациональная скорость катков с адаптивными рабочими органами должна быть увязана с параметрами вибрации и на-
254
значается для соответствующей стадии процесса уплотнения (таблицы 6.9 – 6.12).
2
n= 2 , 4 , 6 , 8 , 10,12
4
n= 14, 16 , 18, 20 , 22 , 24
5
6
n= 26, 28 , 30 , 32, 34 , 36
3
n= 25, 27 , 29 , 31 , 33 , 35
n = 37
1
n = 13, 15 , 17 , 19 , 21 , 23
n = 37
n=1 , 3 , 5 , 7 , 9 , 11
200м
Рисунок 6.17 – Технологическая схема уплотнения слоя насыпи (кольцевая)
4
n =19 - 24
5
n =25 - 30
6
3
n =31 - 37
n =7 - 12
1
А=3,5 м
2
n =13 - 18
n =1 - 6
200 м
Рисунок 6.18 – Технологическая схема уплотнения слоя насыпи (прямая)
Для получения высокого коэффициента уплотнения экономически целесообразно уменьшать толщину слоя уплотнения. При уменьшении толщины слоя на 510 % количество проходов катка уменьшается в 1,5-2,0 раза [143, 147], данная рекомендация в полной мере относится и к обработке материалов катками с адаптивными рабочими органами.
Уплотнение производится проходами уплотняющих машин вдоль насыпи и
255
смещением от бровок к еѐ середине, во избежание сдвигов грунта к краям насыпи.
Каждый последующий проход должен перекрывать след от предыдущего прохода
на 0,15-0,20 м. Наименьшее расстояние прохождения уплотняющих машин от
бровки насыпи должно составлять 0,5 м, длина захватки 200 – 250 м.
В соответствии с разработанной методикой обоснования параметров вибрационных катков с пневмошинными РО (п. 6. 1), проведѐн расчѐт для уплотнения
супесчаного грунта (приложение 4). Принимаемая толщина слоя несвязанного супесчаного грунта – 0,5 м, требуемый ку=1,0. Рекомендуемая масса катка – 9 т, количество проходов по одному следу – 6, длина захватки – 200 м.
Предлагается использовать два технологических подхода к уплотнению
грунтовых слоѐв: с движением катка по прямой и кольцевая схема с разворотом
на насыпи. Первая схема вследствие своей простоты и экономии времени на разворот катка обладает рядом преимуществ, эффективна при использовании самоходных катков. Вторую схему, вследствие своей сложности, целесообразно применять в особых случаях: например, при уплотнении насыпи прицепными катками.
Таблица 6.9 – Технологическая схема при постоянной скорости движения
катка (челночная)
Порядковый номер прохода
υ, км/ч
f, Гц
с1, кН/м
1,2,7,8,13,14,19,20, 25,26,31,32.
4
0
1000
3,4,9,10,15,16,21,22,27,28,33,34.
4
30
4000
5,6,11,12,17,18,23,24,29,30,35,36
4
40
6000
Таблица 6.10 – Технологическая схема при переменной скорости движения
катка (челночная)
Порядковый номер прохода
υ, км/ч
f, Гц
с1, кН/м
1,2,7,8,13,14,19,20, 25,26,31,32.
7
0
1000
3,4,9,10,15,16,21,22,27,28,33,34.
4
30
4000
5,6,11,12,17,18,23,24,29,30,35,36
4
40
6000
Анализ «прямой» схемы движения катка позволяет сделать вывод, что вторая
технологической схема укатки грунтового слоя с возвратно-поступательным дви-
256
жением катка по прямой (таблица 6.10), при прочих равных условиях, позволяет
вести процесс уплотнения с более высокой средней скоростью катка и является
более предпочтительной, с точки зрения повышения производительности работ.
Таблица 6.11 – Технологическая схема при постоянной скорости движения
катка (кольцевая)
Порядковый номер прохода
υ, км/ч
f, Гц
с1, кН/м
1, 2, 3, 4, 13, 14, 15, 16, 25, 26, 27, 28
4
0
1000
5, 6, 7, 8, 17, 18, 19, 20, 29, 30, 31, 32
4
30
4000
9, 10, 11, 12, 21, 22, 23, 24, 33, 34, 35, 36
4
40
6000
Таблица 6.12 – Технологическая схема при переменной скорости движения
катка (кольцевая)
Порядковый номер прохода
υ, км/ч
f, Гц
с1, кН/м
1, 2, 3, 4, 13, 14, 15, 16, 25, 26, 27, 28
7
0
1000
5, 6, 7, 8, 17, 18, 19, 20, 29, 30, 31, 32
4
30
4000
9, 10, 11, 12, 21, 22, 23, 24, 33, 34, 35, 36
4
40
6000
Анализ кольцевой схемы движения катка с адаптивными рабочими органами,
характеризуется наличием значительного количества «холостых» отрезков» движения катка на развороте, что негативно сказывается на производительности работ. Данная технологическая схема движения может быть оправдана только при
использовании
прицепного
катка,
поскольку
в
этом
случае
возвратно-
поступательное движение затруднено.
Рекомендуемой технологической схемой уплотнения насыпей катками с
адаптивными пневмошинными РО является схема с возвратно-поступательным
движением катка по прямой (челночная) при переменном скоростном режиме
(рисунок 6.18, таблица 6.10). Особым преимуществом здесь является, что плотность грунта от начального до требуемого значения достигается одним катком.
257
6.4. Выводы по главе
1. Разработана комплексная методика обоснования параметров вибрационных катков с адаптивными пневмошинными рабочими органами, включающая
обоснование величины контактных напряжений при уплотнении различных грунтов, обоснование величины вынуждающей силы и момента дебалансов вибровозбудителя, выбор рациональной скорости на различных этапах процесса уплотнения.
2. Предложены новые перспективные конструкции пневмошинных рабочих
органов для вибрационных катков. Разработано устройство автоматического регулирования жѐсткости, предложены рекомендации по выбору пневматических
шин.
3. Представлена уточненная общая классификация уплотняющих средств,
учитывающая катки с адаптивными пневмошинными рабочими органами.
4. Разработаны рекомендации по уточнению стандартных технологий уплотнения связанных и несвязанных грунтов катками с адаптивными пневмошинными
рабочими органами. Уплотнение не связанного супесчаного грунта оптимальной
влажности до нормативной плотности – ку=1, осуществляется одним катком за 6
проходов по одному следу. Предложены уточнѐнные технологические схемы
производства работ, проведѐн анализ целесообразности их применения, рекомендуется прямая (челночная) схема движения катка.
258
ЗАКЛЮЧЕНИЕ
Итоги исследования, рекомендации и перспективы дальнейшей разработки
темы:
1. Совокупность результатов теоретических и экспериментальных исследований открывает новое направление в области уплотнения грунтов и совершенствования конструкций вибрационных катков с пневмошинными рабочими органами. Решена крупная научная проблема повышения эффективности использования
вибрационных катков в процессе строительства автомобильных дорог, имеющая
важное хозяйственное значение в области развития транспортной инфраструктуры России и соответствующая реализации правительственной программы
«Транспортная стратегия РФ на период до 2030 года».
2. Анализ существующих и проведѐнных исследований, а также практика
строительства показывают, что резервы повышения эффективности и качества
процесса уплотнения грунтов связаны с дальнейшим совершенствованием вибрационных пневмошинных катков и выбором оптимальных режимов их работы.
3. Разработана математическая модель динамического деформирования упруговязкопластичной среды, позволившая определить рациональные параметры
вибрационных катков с пневмошинными рабочими органами и режимы уплотнения с учѐтом свойств уплотняемой среды.
4. Сформированы и проанализированы модели силового взаимодействия рабочего органа катка с грунтовыми слоями, которые базируются на законах уплотнения упруговязкопластичных сред и учитывают условие интенсивного деформирования грунта. Их реализация на ЭВМ позволяет оценить влияние отдельных
факторов эксплуатационного фона (жѐсткости рабочих органов, частоты колебаний, вынуждающей силы, влажности, деформативных свойств грунта) на интенсивность накопления необратимых деформаций в упруговязкопластичной среде.
5. Получены уравнения регрессии, описывающие закономерности возникновения и развития напряжѐнно-деформируемого состояния грунтов в процессе уплотнения:
259
– зависимости жѐсткости с1 и коэффициента вязкого трения b1 пневмошинных рабочих органов от внутреннего давления и количества бандажей, позволяющие оценить энергоэффективность колебательных процессов за счѐт снижения диссипации энергии в шинах при изменении еѐ жѐсткости. Так увеличение
жѐсткости с 1000 кН/м до 6000 кН/м позволяет снизить затраты энергии на диссипацию в 5 – 6 раз;
– зависимости площади пятна контакта от жѐсткости рабочих органов и
плотности обрабатываемой среды (количества проходов). Увеличение значений
жѐсткости в 5 – 6 раз, обеспечивает уменьшение площади пятна контакта в 2 – 3
раза, что позволяет адаптировать контактные напряжения в широком диапазоне,
обеспечивая уплотнение грунта одним катком от рыхлого состояния до нормативной плотности;
– зависимости распределения напряжений и деформаций по толщине грунтового слоя, определяющие области эффективного использования катков: для малосвязанных грунтов рекомендуемый диапазон жѐсткости пневмошин составляет
1000 – 8000 кН/м; для связанных грунтов – 1000 – 5000 кН/м. С увеличение толщины слоя влияние жѐсткости существенно снижается.
– зависимости, определяющие эффективную зону проработки уплотняемой
среды от жѐсткости РО и частоты приложения внешней силы. Для малосвязанных
грунтов – до 0,5 м; для связанных грунтов - до 0,4 м. Рациональный диапазон частоты приложения уплотняющей силы составляет 30 – 40 Гц.
6. Разработана методика оптимизации основных параметров вибрационного
катка с пневмошинным рабочим органом. Установлены значения оптимальных
параметров для уплотнения суглинистого и супесчаного грунтов оптимальной
влажности на начальной, средней и заключительной стадиях процесса уплотнения.
7. Установлены значения жѐсткости пневмошинных рабочих органов для
различных этапов уплотнения:
260
– для малосвязанных грунтов на начальном этапе (ку=0,85 – 0,90) рекомендуемый диапазон жѐсткости 600…1000 кН/м, на среднем этапе (ку=0,90 – 0,95) –
4000…5000 кН/м и на заключительном этапе (ку=0,95 – 1,00) – 6000…8000 кН/м.
– для связанных грунтов на начальном этапе (ку=0,85 – 0,90) – 600…1000
кН/м, на среднем этапе (ку=0,90 – 0,95) – 3000…4000 кН/м и на заключительном
этапе (ку=0,95 – 1,00) – 4000…5000 кН/м.
8. Предложен критерий, оценивающий энергоэффективность передачи вибрации при уплотнении грунтов вибрационными катками с пневмошинными рабочими органами – коэффициент относительной энергоэффективности передачи
вибрации кп.
9. Практический опыт использования существующих пневмошинных рабочих органов катков статического действия показывает, что их жѐсткость не превышает 1000 кН/м, при этом они обладают значительной диссипацией энергии
колебательных процессов. Рекомендуемые вибрационные катки с пневмошинами
имеют жѐсткость в пределах 1000 – 6000 кН/м, что позволяет на одном катке регулировать контактные напряжения, обеспечивающие выполнение работ по уплотнению грунтов от рыхлого состояния до плотного.
10. Разработана комплексная методика обоснования параметров вибрационных катков с пневмошинными рабочими органами и режимов их работы при уплотнении малосвязанных и связанных грунтов. Результаты исследований внедрены на предприятиях строительной отрасли Сибирского региона, а также на ведущем в России заводе-производителе уплотняющей техники ОАО «Раскат» (г. Рыбинск).
11. Разработанные теоретические положения подтверждены экспериментальными исследованиями в лабораторных условиях на изготовленном экспериментальном образце вибрационного катка с адаптивным пневмошинным рабочим органом диаметром 1м, способном изменять жѐсткость шин в диапазоне 500 – 6000
кН/м (за счѐт изменения давления воздуха и установки дополнительных металлических бандажей), развивать удельные контактные напряжения в диапазоне 0,045
261
– 0,125 МПа, вынуждающую силу 26, 47 кН, частоту колебаний 30, 40 Гц. Сравнение результатов уплотнения грунтов экспериментальным образцом и импортным аналогом SAKAI GW-750 (Япония), показали преимущество разработанного
катка по производительности до 30%. Погрешность между теоретическими и экспериментальными данными не превысила 12 %.
12. Проведенный расчѐт экономической эффективности от использования
вибрационного катка с адаптивными пневмошинными рабочими органами по
сравнению с импортным катком SAKAI GW-750 составил около 600, по сравнению с двумя отечественными катками (средним и тяжѐлым) около 1200 тыс. руб.
в год.
262
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Обозначение
Наименование обозначения
ζ, ζмах, ζт, ζпр, ζel, ζpl, ζv
Напряжения
ку
Коэффициент уплотнения
qл, qв
Давление линейное
Е, Е01, Е02, Еос
Модуль общей деформации
Еу
Модуль упругой деформации
Еп
Модуль пластичной деформации
R
Радиус вальца (шины)
Rпр
Радиус протектора шины
Fст
Сила тяжести вальца
L, Lmin
Ширина вальца
h, h0, hпл
Толщина уплотняемого слоя
Δх
Деформация абсолютная (необратимая)
Δху
Деформация упругая (обратимая)
Δхро
Деформация рабочего органа (шины)
pw
Давление внутри шины
μ
Коэффициент нагрузки относительный
S
Площадь пятна контакта
s
Площадь опорной поверхности кулачка
Nр
Сила реакции
а
Ширина пятна контакта
е
Расстояние между шинами
hk
Высота кулачка
bk
Толщина кулачка
л
Количество кулачков
h1, h2, h3
Толщина зоны уплотнения
кэ
Коэффициент эффективности
263
кпр
Коэффициент превышения
F0
Сила вынуждающая
ρ, ρmax, ρконеч, ρст, ρ0
Плотность
Н, Н0, Н1
Высота подъѐма трамбовки
t, tэ
Время
η0
Период действия импульса
J
Импульс удельный
Jпред
Импульс предельный
g
Ускорение свободного падения
ζпр
Предел прочности
W, Wп
Влажность
W0
Влажность оптимальная
γг
Вес объемный
θ
Угол внутреннего трения грунта
С
Сцепление
ν
Коэффициента Пуассона
IL
Показатель текучести
, 0, н, р
Вязкость
b, b1, b2
Коэффициент вязкого трения
A, Авых
Виброускорение
f
Частота колебаний
ε, εт, εпр
Деформация относительная
υиз, υизро
Скорость деформации (изменения напряженного
состояния)
dш
Диаметр штампа
χ
Коэффициент изменения вязкости
V, Vtot
Объѐм грунта
m, msk
Масса грунта
mw
Масса воды
Vw
Объѐм воды
264
Sг
Степень (коэффициент) влажности
Vа
Объем защемленного воздуха (относительный)
Кu
Показатель количества глинистых частиц
R2
Достоверность аппроксимации
Θ
Функция Хевисайда
М
Масса рабочего органа (колеса)
с, с1, с2, сpl, сel
Жѐсткость
ω, ω0
Частота круговая
n
Количество циклов (проходов)
υ
Скорость катка
d
Длина пятна контакта (продольная)
u, u0, u1, u2
Скорость вертикальная трамбовки (груза)
Fд
Сила внешняя периодическая (динамическая)
Nэ
Количество экспериментов
ф
Число факторов
э
Коэффициент значимости
z
Квантиль нормального распределения
Δ
Допустимая погрешность
Коэффициент вариации величины
nи
Количество измерения
у1, ус
Результат опыта
кв
Среднеквадратичное отклонение
U
Энергия потенциальная
Ек
Энергия кинетическая
Адеф, Адисс
Работа
mг
Масса сбрасываемого груза
δ
Логарифмический декремент затухания колебаний
τд
Период колебаний
265
Uвых, U o n
Напряжение электрическое
l
Перемещение штока
N
Количество бандажей
Q
Добротность колебательной системы
θ0, θ1
Угол образующей параметра пятна контакта d
Х
Вектор-столбец переменных задачи
Вектор-столбец задаваемых параметров
кп
Коэффициента энергоэффективности передачи
вибрации
Lуч
Длина захватки (укатываемого участка)
Апер
Величина перекрытия проходов
Пэкс
Производительность эксплуатационная
кв
Коэффициент использования рабочего времени
kвосст
Коэффициент восстановления
Q0, Q1
Угол отклонения груза
lв
Длина подвеса
Ак
Амплитуда колебаний
Коэффициент, характеризующий снижение амплитуды
rд
Эксцентриситет дебаланса
mд
Масса дебаланса
Сп
Число повторностей приложения силы при вибрировании
Ж
Количество воды
266
СПИСОК ЛИТЕРАТУРЫ
1.
Абраменков Э. А. Совершенствование технологий уплотнения на базе
аналитических исследований напряжений в грунтовых средах/ Э. А. Абраменков,
Д. Э. Абраменков, А. В. Грузин// Известия высших учебных заведений. –
Новосибирск, 2008. – № 4. – С. 73-76. – (Строительство).
2.
Агейкин Я. С. Определение деформации контакта шины с мягким
грунтом/ Я. С. Агейкин//Автомобильная промышленность. – 1959. – №5. – С. 33–
37.
3.
Азюков Н. А. Обоснование параметров виброплиты с гидрообъѐмным
вибровозбудителем для уплотнения асфальтобетонной смеси: дис…. канд. техн.
наук/ Н. А. Азюков; СибАДИ. – Омск, 1986. – 177 с.
4.
Алексеева Т. В. Дорожные машины: учебник: В 2 ч. Ч. 1. Машины для
земляных работ / Т. В. Алексеева, К. А. Артемьев, А. А. Бромберг и др. – Изд. 3-е,
перераб. и доп. – М.: Машиностроение, 1972. – 504 с.
5.
Анфимов В. А. Исследование комплексного уплотнения грунтов ма-
шинами на пневматических шинах: дис… канд. техн. наук/ В.А. Анфимов; ХАДИ.
– Харьков, 1970. – 189 с.
6.
Бабков В.Ф. Качение автомобильного колеса по грунтовой поверхно-
сти/ В. Ф. Бабков: Труды/ МАДИ. – М., 1953. – Вып. 15. – С. 50 – 69.
7.
Бабков В. Ф. Сопротивление качению колеса по грунтовой деформи-
рующейся поверхности/В. Ф. Бабков// Труды/ МАДИ. – М., 1955. – Вып. 16. – С.
79 – 107.
8.
Бабков В. Ф. Сопротивление грунтов деформированию с различными
скоростям /В. Ф. Бабков// Труды/ МАДИ. – М., 1957. – Вып. 16.– С. 107–120.
9.
Бабков В. Ф. Основы грунтоведения и механики грунтов: учеб. посо-
бие/ В. Ф. Бабков, В. М. Безрук. – М.: Высшая школа, 1976. – 328 с.: ил.
10.
Баловнев В. И. Моделирование процессов взаимодействия со средой
рабочих органов дорожно-строительных машин: учеб. пособие для студентов вузов / В. И. Баловнев. – М.: Высшая школа, 1981. – 335 с.: ил.
267
11.
Баркан Д. Д. Экспериментальные исследования вибровязкости грунта/
Д. Д. Баркан// ЖТФ. – 1948. – Т. 8. – Вып. 5.– С.701 – 706.
12.
Баркан Д. Д. Динамика оснований и фундаментов/ Д. Д. Баркан. – М.:
Стройвоенмориздат, 1948. – 411 с.
13.
Баркан Д. Д. Устройство оснований сооружений с применением виб-
рирования/ Д. Д. Баркан. – М.: Изд-во Минстроя предприятий машиностроения,
1949. – 123 с.
14.
Баркан, Д. Д. Теория поверхностного уплотнения грунтов/ Д. Д. Бар-
кан, О. Я. Шехтер // Применение вибрации в строительстве. – М., 1962. – С. 5-26.
15.
Батраков О. Т. Уплотнение грунтовых оснований катками на пневма-
тиках/ О. Т. Батраков// Труды/ ХАДИ.– Харьков, 1954. – Вып. 17. – С. 55–59.
16.
Батраков О. Т. Распределение контактных давлений по следу пневма-
тического колеса / О. Т. Батраков. – М.: Автотрансиздат, 1956. –199 с.
17.
Батраков О. Т. Уплотнение грунтов и дорожных покрытий катками на
пневматиках: науч. сообщение №5/ О. Т. Батраков; ХАДИ. – Харьков: Изд-во
Харьк. гос. ун-та, 1958. – 75 с.
18.
Батраков О. Т. Механические свойства пневматических шин низкого
давления/О.Т. Батраков //Труды/ ХАДИ. – Харьков, 1958. – Вып. 21. – С. 25–29.
19.
Батраков О. Т. Сопротивление грунтов при уплотнении/О. Т. Батраков
// Материалы совещания по закреплению и уплотнению грунтов. – Киев: Изд-во
Акад. стр-ва и архит., 1962. – С. 12-15.
20.
Батраков О. Т. Оценка вязких свойств грунтов при вдавливании
штампа/О. Т. Батраков //Труды/ ХАДИ. – Харьков, 1963. – Вып. 28. – С. 49–53.
21.
Батраков О. Т. Уплотнение грунтов катками на пневматических колѐ-
сах/ О. Т. Батраков// Труды/ ХАДИ. – Харьков, 1963. – Вып. 30. – С. 47–53.
22.
Батраков О. Т. Вязкие свойства грунтовых оснований дорожных
одежд автомобильных дорог/ О. Т. Батраков// Известия вузов. Строительство и
архитектура. – 1964. – №4. – С. 74-78.
268
23.
Батраков О. Т. Требования к уплотнению грунтов в дорожном строи-
тельстве/О. Т. Батраков// Автомобильные дороги и дорожное строительство: межвед. респ. сб. – Киев: Будiвельник, 1965. – Вып. 1. – С. 36 – 40.
24.
Безбородова Г. Б. К расчѐту удельных давлений автомобиля на грунт//
Труды. / ХАДИ. – Киев: Науч.-техн. изд-во УССР, 1953. – Вып. 15.– С. 5–6.
25.
Безбородова Г. Б. Моделирование движения автомобиля/ Г. Б. Безбо-
родова, В. Г. Галушко. – Киев: Вища школа, 1978. – 167 с.
26.
Безрук В. М. Геология и грунтоведение/ В. М. Безрук. – М.: «Недра»,
1977. – 256 с.
27.
Белецкий Б. Ф. Технология и механизация строительного производст-
ва: учебник./ В. Ф. Белецкий. – Ростов-на-Дону: Феникс, 2003. – 752 с.
28.
Белоусов Л. И. Динамические параметры колебательной системы кат-
ков на пневматических шинах/ Л. И. Белоусов, М. И. Капустин, Н. Я. Хархута//
Труды/ СоюзДорНИИ. – М., 1975. – Вып. 44. – С. 71-75.
29.
Бидерман В. Л. Автомобильные шины/ В. Л. Бидерман и др. – М.: Ав-
тотрансиздат, 1963. – С. 18–19.
30.
Бируля А. К. Деформация и уплотнение грунта при качении колеса/
А. К. Бируля//Труды/ ХАДИ. – Харьков, 1950. – Вып. 6. – С. 7–11.
31.
Бируля А. К. Уплотнение четырѐхфазного грунта / А. К. Бируля// Тру-
ды/ ХАДИ. – Харьков, 1953. – Вып. 10. – С. 18–21.
32.
Бируля А. К. Эксплуатация автомобильных дорог/А. К. Бируля. – М.:
НТИ Автотрансп. лит, 1956. – 340 с.
33.
Бируля А. К. Взаимодействие пневматического колеса, рассматривае-
мого как безмоментная оболочка с нежѐсткими поверхностями качения/ А. К. Бируля, О. Т. Батраков //Труды/ ХАДИ. – Харьков, 1958. – Вып. 21. – С. 11–16.
34.
Бируля А. К. К теории качения пневматического колеса по деформи-
руемой поверхности/ А. К. Бируля//Труды/ ХАДИ. – Харьков, 1959. – Вып. 21. –
С. 23–27.
35.
Бируля А. К. Грунтовые фигуры и физические основы уплотнения
связанных грунтов/ А. К. Бируля, Н. Ф. Сасько// Материалы Всесоюзного совеща-
269
ния по закреплению и уплотнению грунтов: Научно-исследовательская лаборатория гидрогеологических и инженерно-геологических проблем грузинского политехнического института им. В. И. Ленина. – Тбилиси, 1964. – С. 56–60.
36.
Бируля В. И. Взаимодействие компонентов трѐхфазного грунта при
его уплотнении/ В. И. Бируля// Труды/ ХАДИ. – Харьков, 1950. – Вып. 10. –
С. 16–19.
37.
Блехман И. И. Вибрационное перемещение/ И. И. Блехман,
Г. Ю. Джанелидзе. – М.: Наука, 1964. – 410 с.
38.
Бойков В. П. Шины для тракторов и сельскохозяйственных машин/
В. П. Бойков, В. Н. Белковский. – М.: Агропромиздат, 1988. – 240 с.
39.
Борщевский А. А. Механическое оборудование для производства
строительных материалов и изделий: учеб. для вузов/ А. А. Борщевский,
А. С. Ильин. – М.: Высшая школа, 1987. – 368 с.: ил.
40.
Варганов С. А. Машины для уплотнения грунтов и дорожно-
строительных материалов/ [С. А. Варганов, Г. С. Андреев, П. И. Марков и др.]. –
М.: Машиностроение, 1981. – 240 с.
41.
Веригин Ю. А. Строительные машины: учеб. пособие/ Ю. А. Веригин
– Барнаул: Изд-во АлтГТУ, 2000. - 137 с.
42.
Вялов С. С. Реологические основы механики грунтов: учеб. пособие
для строительных вузов/ С. С. Вялов. – М.: Высшая школа, 1978. – 447 с., ил.
43.
Герсеванов Н. М. Теоретические основы механики грунтов и их прак-
тическое применение/ Н. М. Герсеванов, Д. Е. Польшин. – М.: Госстройиздат,
1948. – 551 с.
44.
Горелышев Н. В. Технология и организация строительства автомо-
бильных дорог/ Н. В. Горелышев. – М., 1992. – 551с.
45.
Гребенщиков В. М. Экспериментальные исследования проходимости
автомобиля по мягким грунтам/ В.М. Гребенщиков // Труды/ МАДИ. – М., 1954. –
Вып. 1. – С. 21–24.
270
46.
Гребенщиков В. М. Экспериментальные исследования деформации
шины при движении автомобиля по мягким грунтам/ В. М. Гребенщиков// Автомобили и тракторная промышленность. – 1956. – №10. – С. 18–20.
47.
Гордыч Д. С. Исследования колебаний механической системы с пнев-
мошиной в качестве упругого элемента/ Д. С. Гордыч // Теоретические и экспериментальные исследования дорожных машин. – Омск, 1971. – С. 9–19.
48.
Грицай В. Г. Руководство к лабораторным работам по физике/
В. Г. Грицай, Э. А. Майер и д. р. – Омск: Изд-во «Омская правда», 1973. – 168 с.
49.
Длина автодорог// Российские реформы в цифрах и фактах [Элек-
тронный ресурс]. – Режим доступа: http://www.kaig.ru/doorway.pdf.
50.
Добров Э. М. Механика грунтов: учебник для студ. вузов / Э. М. Доб-
ров. – М.: Академия, 2008. – 272 с.
51.
Дубровин А. Е. Методика выбора основных параметров пневмовибро-
катка/ А. Е. Дубровин, К. П. Севров// Исследования параметров и расчѐты дорожно-строительных машин: науч. тр. – Саратов, 1970. – Вып. 44. – С.47–50.
52.
Дубровин А. Е. Определение эффективных частот колебаний рабочего
органа виброуплотнителя/ А. Е. Дубровин// Исследования параметров и расчѐты
дорожно-строительных машин: науч. тр. – Саратов, 1972. – Вып. 52.– С. 40–43.
53.
Дульянинов А. В. О колеблющейся массе вибрационных машин/
А. В. Дульянинов, М. И. Капустин// Повышение использования машин в строительстве. – Л.: ЛИСИ, 1983. – С. 10 – 14.
54.
Жиркович С. В. Уплотняющие машины в строительстве и производ-
стве строительных изделий/ С.В. Жиркович, Н.И. Наумец// Теория и расчѐты основных параметров: в 3 ч. Ч. 3. – Куйбышев, 1962. –– 444 с.
55.
Закирзаков Г. Г. Экспериментально-теоретическое определение пара-
метров двухмассовой колебательной системы/ Г. Г. Закирзаков, М. И. Капустин//
Рабочие процессы и динамика машин для разработки, уплотнения и вибрационного формирования изделий: межвуз. сб. науч. тр. – Ярославль, 1986. –105 с.
56.
Захаренко А. В. Обоснование амплитуды колебаний вибраторов и ра-
бочих скоростей дорожных катков/ А. В. Захаренко, С. В. Савельев// Актуальные
271
проблемы повышения надѐжности и долговечности автомобильных дорог и искусственных сооружений на них: сб. тр. Всероссийской научно-практ. конф. 22–
25 апр. 2003 г. – Барнаул: Изд-во АлтГТУ, 2003. – С. 165–168.
57.
Захаренко А. В. Теоретические и экспериментальные исследования
процессов уплотнения катками грунтов и асфальтобетонных смесей: дис…. д-ра
техн. наук/ А. В. Захаренко; СибАДИ. – Омск, 2005. – 320 с.
58.
Зедгенизов В. Г. Методология создания машин для прокладки гибких
подземных коммуникаций: дис.... д-ра техн. наук/ В. Г. Зедгенизов; ИрГТУ. – Иркутск, 2005. 234 с.
59.
Иванов Н. Н. Дорожное почвоведение и механика грунтов/ Н. Н. Ива-
нов, В. В. Охотин. – М.: Госстройиздат, 1934. – 98 с.
60.
Иванов Н. Н. Требования к уплотнению грунтов и земляных сооруже-
ний/ Н. Н. Иванов// Механизированное уплотнение грунтов в строительстве. – М.:
Госстройиздат, 1962. – С. 31–33.
61.
Ишлинский А. Ю. Математическая теория пластичности/ А. Ю. Иш-
линский, Д. Д. Ивлев. – М.: Изд-во: ФИЗМАТЛИТ, 2001. – 704 с.
62.
Калужский Я. А. Закономерности укатки грунтовых слоѐв жѐсткими
катками/ Я. А. Калужский// Труды/ ХАДИ. – Харьков, 1959. – Вып. 20. – С. 34–36.
63.
Калужский Я. А. Уплотнение земляного полотна и дорожных одежд:
учеб. пособие/ Я. А. Калужский, О. Т. Батраков. – М.: Транспорт, 1971. – 159 с.
64.
Кнороз В. И. Работа автомобильной шины/ В. И. Кнороз. – М.: Авто-
трансиздат, 1957. – 134 с.
65.
Костельов М. П. Возможности и уплотнение виброкатками грунтов
различного типа и состояния/ М. П. Костельов// Дорожная техника: каталогсправочник.− СПб.: Славутич, 2004. – С. 72-82.
66.
Костельов М.П. «Умные» виброкатки для дорожников/ М. П. Кос-
тельов//Дорожная техника: каталог-справочник.− СПб.: Славутич, 2006. – С.30-62.
67.
Костельов М. П. Опять о качестве и эффективности уплотнения раз-
личных грунтов современными виброкатками/ М. П. Костельов// Дорожная техника: каталог-справочник. − СПб.: Славутич, 2008. – С. 40 – 47.
272
68.
Коротин О. Ю. Самоходные катки на пневматических шинах: обзор/
О. Ю. Коротин, Л. А. Антипов, А. И. Путк. – М.: ЦНТИИТЭстроймаш, 1968. – 60
с.
69.
Корчагин П. А. Снижение динамических воздействий на оператора
автогрейдера в транспортном режиме: монография/ П. А. Корчагин, Е. А. Корчагина, И. А. Чакурин. – Омск: СибАДИ, 2009. – 195 с.: ил.
70.
Кустарев Г. В. Анализ факторов, влияющих на качество процесса уп-
лотнения/ Г. В.Кустарев, С. А. Павлов, П. Е. Жарцов// Механизация строительства. – 2013. – № 4 (826). – С. 6-10.
71.
Лебедев А. Ф. Уплотнение грунтов при различной их влажности/
А. Ф. Лебедев. – М.: Стройвоенмориздат, 1949. – 140 с.
72.
Локшин Е. С. Исследование и выбор рациональных режимов работы
самоходных катков при строительстве покрытий из горячих асфальтобетонных
смесей: автореф. дис. … канд. техн. наук/ Е.С. Локшин; МАДИ. – М., 1982. – 19 с.
73.
Ложечко В. П. Уплотняющие машины: пособие по выбору оборудова-
ния для уплотнения грунтов и асфальтобетонных смесей (на примере машин, выпускаемых ЗАО «РАСКАТ», г. Рыбинск)/ В. П. Ложечко, А. А. Шестопалов,
В. И. Окунев и др. – Рыбинск: Рыбинский дом печати, 2004. – 79 с.
74.
Малиновский Е. Ю. Синтез уравнений движения и анализ динамики
механизмов строительных и дорожных машин: сб. науч. тр./ Е. Ю. Малиновский;
– М.: ВНИИстройдормаш, 1988. – №73. – С. 3 – 14.
75.
Малышев А. А. Качение колеса с пневматической шиной по деформи-
руемой поверхности с образованием колеи/ А. А. Малышев// Труды/ МАДИ. – М.,
1958. – Вып. 22. – С. 44 – 45.
76.
Месчан С. Р. Экспериментальная реология глинистых грунтов. – М.:
Недра, 1985. – 342 с.
77.
Мещеряков В. А. Нейросетевое адаптивное управление тяговыми ре-
жимами землеройно-транспортных машин: монография. – Омск: ОмГТУ, 2007. —
219 с.
273
78.
Мещеряков В. А. Введение в методы математического программиро-
вания. Компьютерный практикум в среде MATLAB: учеб. пособие/ В. А. Мещеряков, В. П. Денисов, Л. А. Денисова. – Омск: Полиграфический центр Кан, 2013.
– 142 с.
79.
Налимов В. В. Теория эксперимента/ В. В.Налимов. – М.: Наука, 1971.
– 260 с.
80.
Налимов В. В. Логические основания планирования эксперимента/
В. В. Налимов, Т. И. Голикова. – Изд. 2-е, перераб. и доп. – М.: Металлургия,
1980. – 152 с.
81.
Овчинников П. Ф. К теории вибрационных машин с учѐтом влияния
обрабатываемой среды/ П. Ф. Овчинников //Прикладная механика. – 1965. – №7. –
С. 84 – 90.
82.
Овчинников П. Ф. Виброреология/ П. Ф. Овчинников. – Киев: Наук.
Думка, 1983. – 272 с.
83.
Островцев Н. А. Самоходные катки на пневматических шинах/
Н. А. Островцев. – М: Машиностроение, 1969. – 104 с.
84.
Пермяков В. Б. Совершенствование теории, методов расчѐта и конст-
рукций машин для уплотнения асфальтобетонных смесей: дис. … д-ра техн. наук/
В.Б. Пермяков; СибАДИ. – Омск, 1990. – 485 с.
85.
Пермяков В. Б. Обоснование выбора параметров вибрационных кат-
ков/ В. Б. Пермяков, А. В. Захаренко, С. В. Савельев// Известия вузов. – 2003. –
№2. – C. 100 – 103. – (Строительство)
86.
Пермяков В. Б. Комплексная механизация строительства: учебник для
строительных и автомобильно-дорожных институтов/ В. Б. Пермяков.– М.: Высшая школа, 2004. – 540 с.
87.
Пермяков В. Б. Технологические машины и комплексы в дорожном
строительстве (производственная и техническая эксплуатация): учеб. пособие/
В. Б. Пермяков [и др.]; под ред. проф. В. Б. Пермякова.– Омск: изд-во СибАДИ,
2007. – 440 с. Гл. 20.
274
88.
Пермяков В. Б. Перспективы развития конструкций асфальтоукладчи-
ков и дорожных катков/ А. В. Захаренко, В. Б. Пермяков, А. С. Семѐнов,
В. М. Максимов// Строительные и дорожные машины. – 2012 . – №2.– С. 19 – 23.
89.
Покровский Г. И. Исследования по физике грунтов/ Г. И. Покровский.
– М.-Л.: ОНТИ, 1937. – 48 с.
90.
Покровский Г. И. Трение и сцепление в грунтах/ Г. И. Покровский. –
М.-Л.: Стройиздат, 1941. – 60 с.
91.
Попов, Г. Н. Исследование и обоснование параметров вибрационных
катков для уплотнения грунтов: дис. ... канд. техн. наук/ Г. Н. Попов. – Л., 1970. –
196 с.
92.
Попов, Г. Н. Выбор параметров прицепных вибрационных катков /
Г. Н. Попов, Н. Я. Хархута // Строительные и дорожные машины. – 1972. –№ 1. –
С. 16-17.
93.
Портал
Sakaiproject
[Электронный
ресурс].−
Режим
досту-
па:http://www.sakaiproject.org.
94.
Промышленный портал Complexdoс [Электронный ресурс].− Режим
доступа: http://www.complexdoc.ru/
95.
Пульников С. А. Взаимодействие вибронагруженных магистральных
газопроводов с окружающими грунтами/ дис. … канд. техн. наук/ С. А. Пульников; Тюменский государственный нефтегазовый университет. – Тюмень, 2007 г. –
173 с.
96.
Работнов Ю. Н. Реология. Теория и приложения/ под ред. Ф. Эйрика;
пер. с англ.; под общ. ред. Ю. Н. Роботнова, П. А. Ребиндера. – М.: Изд-во иностр.
лит-ры, 1962. – 824 с.
97.
Работнов Ю. Н. Механика деформируемого твѐрдого тела: учеб. посо-
бие для вузов/ Ю. Н. Работнов. – 2-е изд., испр. – М.: Наука, 1988. – 712 с.
98.
Развитие инфраструктуры. Тенденции и перспективы: Услуги компа-
нии «Делойт» [Электронный ресурс]. – Режим доступа: http://www.deloitte.com/
assets/DcomKazakhstan/Local20Assets/Documents/dtt_ru_Government_Infrastructure_
brochure.pdf.
275
99.
Ребиндер П. А. Физико-химическая механика как основа закрепления
грунтов в дорожном строительстве и производстве строительных материалов на
основе грунтов/ П. А. Ребиндер// В трудах совещания по теоретическим основам
мелиорации грунтов. – Изд-во МГУ, 1961. – 181 с.
100.
Ростовиков М. И. Исследования влияния скорости и повторности при-
ложения напряжений на уплотняемость грунтов при строительстве аэродромов:
автореф. дис. … канд. техн. наук/ М. И. Ростовиков. – Л., 1950. – 18 с.
101.
Са-Чин-Лин. Ускоренное определение модуля деформации грунтов с
учѐтом их структурно-механических свойств/ Са-Чин-Лин //Труды/ МАДИ. – М.,
1958. – Вып. 22. – С.75 – 78.
102.
Савельев С. В. Пат. 21401 Российская Федерация, МПК Е01С19/27,
Е01С19/28, Е02D3/046 Валец дорожного катка/ Захаренко А. В., Пермяков В. Б.,
Савельев С. В. и др.; заявитель и патентонаблюдатель Сибирская гос. Автомобильно-дорожная академия. – № 2000102134/20; заявл. 26.01.2000; опуб.
20.01.2002, Бюл. № 2
103.
Савельев С. В. Обоснование выбора параметров вибрационных катков/
С. В. Савельев, В. Б. Пермяков, А. В. Захаренко// Известия ВУЗов (Строительство). –
Новосибирск. – 2003. – №2. – C. 100–103.
104.
Савельев С. В. Адаптация режима работы дорожного катка для уплотне-
ния грунтов/ С. В. Савельев, Н. А. Азюков// Известия ВУЗов (Строительство). – Новосибирск. – 2004. – №8. – C. 90–93.
105.
Савельев С. В. Обоснование рациональных параметров вибрационного
гидрошинного катка для уплотнения грунтов: дис…. канд-та техн. наук/ С. В. Савельев; СибАДИ. – Омск, 2004. – 172 с.
106.
Савельев С. В. Перспективные пути развития уплотняющей техники/
С. В. Савельев// Строительные и дорожные машины. – М., 2005. – №7. – С. 24-25.
107.
Свид. 21401 Российская Федерация, МПК7 Е01С19/27, Е01С19/28, Е02D
3/046. Валец дорожного катка /Захаренко А. В., Пермяков В. Б., Савельев С. В., Иванов В. Н., Дубков В. В.; заявитель и патентообладатель Сибирская гос. Автомобиль-
276
но-дорожная академия. – №2000102134/20; заявл. 26.01.2000; опуб. 20.01.2002. Бюл.
№ 2.
108.
Пат. 2213825 Российская Федерация, МПК7 Е01С19/27, Е01С19./28,
Е02D3/046. Валец дорожного катка /Савельев С. В., Захаренко А. В., Пермяков В. Б.;
заявитель и патентообладатель Сибирская гос. Автомобильно-дорожная академия. –
№ 2001132500; заявл. 29.11.2001; опуб. 10.10.2003. Бюл. 28.
109.
Cавельев С. В. Пат. 68524 Российская Федерация, МПК7 Е01 С19/28
Валец дорожного катка/ Дубков В. В., Серебрянников В. С., Cавельев С. В.; заявитель и патентообладатель Сибирская гос. Автомобильно-дорожная академия.–
№ 2007119927/22; заявл. 28.05.2007; опуб. 27.11.2007 Бюл. № 33.
110.
Cавельев С. В. Пат. 2341609 Российская Федерация, МПК: Е01 С19/28,
19./28. Валец дорожного катка /Савельев С. В.; заявитель и патентообладатель
Сибирская гос. автомобильно-дорожная академия. – №2006139545/03; заявл.
07.11.2006; опуб. 20.12.2008.Бюл. № 35.
111.
Cавельев С. В. Пат. 93090 Российская Федерация, МПК: Е01 С19/28,
19./28. Валец дорожного катка /Савельев С. В., Лашко А. Г.; заявитель и патентообладатель Сибирская гос. Автомобильно-дорожная академия. – №2009146463/22;
заявл. 14.12.2009; опуб 24.04.2010 , Бюл. № 11.
112.
Савельев С. В. Уплотнение грунтов катками с адаптивными рабочими
органами: монография/ С. В. Савельев. – Омск: СибАДИ, 2010. – 122 с.
113.
Савельев С. В. Возможности совершенствования современной уплот-
няющей техники/ С. В. Савельев, А. Г. Лашко // Известия ВУЗов. – Новосибирск,
2010. – №5.– C. 100-103.−(Строительство)
114.
Савельев С. В. Исследования реологических параметров адаптивного
рабочего оборудования дорожного катка/ С. В. Савельев, В. Б. Пермяков,
В. А. Мещеряков и др. // Строительные и дорожные машины. – 2011. – № 12. – С.
51-53.
115.
Савельев С. В. Инновационные решения интенсификации процессов
строительства
дорожно-транспортной
инфраструктуры/
С.
В.
Савельев,
А. Г. Лашко// Вестник СибАДИ. – Омск: СибАДИ, 2012. – №1 (23). – С. 20 – 22.
277
116.
Савельев С. В. Исследования напряжѐнно-деформированного состоя-
ния упруго-вязкой среды при
вибрационном нагружении/ С. В. Савельев,
В. В. Михеев //Вестник СибАДИ. – Омск: СибАДИ, 2012. – №3 (25). – С. 83 – 87.
117.
Савельев С. В. Исследования деформирования упруговязкой среды
при ударном нагружении/ С. В. Савельев, В. В. Михеев // Вестник СибАДИ. –
Омск: СибАДИ. – № 4 (26). – 2012. – С. 100 – 103.
118.
Савельев С. В., Лашко А. Г. Эмпирические исследования эффективно-
сти применения пневмошинного вальца с бандажами для уплотнения грунтов //
Известия ВУЗов. – Новосибирск, 2012. – №5. – C. 127-132. – (Строительство).
119.
Савельев С. В. Экспериментальные исследования «активной области» де-
формируемой среды при вибрационном уплотнении/ С. В. Савельев, Г. Г. Бурый//
Вестник СибАДИ. – Омск: СибАДИ, 2012. – № 5 (27). – С. 88 – 95.
120.
Савельев С. В. Анализ уплотнения грунтов перспективными вибрацион-
ными катками/ С. В. Савельев, Г. Г. Бурый// Строительные и дорожные машины. –
М., 2013. – № 1. – С. 8 - 10.
121.
Савельев С. В. Модель взаимодействия рабочего органа вибрационного
катка с уплотняемой средой/ С. В. Савельев, С. А. Милюшенко, А. Г. Лашко// Механизация строительства. – М., 2013. – № 1 (823). – С. 24-28.
122.
Савельев С. В. Исследования процесса вибрационного деформирования
грунта/ С. В. Савельев, Г. Г. Бурый// Вестник Государственного Иркутского технического университета. – Иркутск, 2013. – № 2 (73). – С. 66-69.
123.
Савельев С. В. Обоснование параметров адаптивных катков для уплотне-
ния грунтов/ С. В. Савельев// Вестник СибАДИ.– Омск: СибАДИ, 2013. – № 1 (29). –
С. 35 – 38.
124.
Савельев С. В. Анализ эффективности применения адаптивных катков
при уплотнении грунта/ С. В. Савельев// Вестник СибАДИ. – Омск: СибАДИ,
2013. – № 2 (30). – С. 47 – 51.
125.
Савельев С. В. Математическое описание колебательной системы «вибра-
ционный рабочий орган – грунт/ С. В. Савельев , Г. И. Шабанова, Г. Г. Бурый// Вестник СибАДИ. – Омск: СибАДИ, 2013. – № 3 (31). – С. 102 – 107.
278
126.
Савельев С. В. Исследование влияния деформации адаптивного рабочего
оборудования дорожного катка на процесс деформирования уплотняемого грунта/
С. В. Савельев, В. В. Михеев// Строительные и дорожные машины. – М., 2013. – № 7.
– С. 45 - 50.
127.
Силаев А. А. Спектральная теория подрессоривания транспортных
машин/ А. А. Силаев. – М.: Машиностроение, 1970. – 192 с.
128.
СНиП 3.06.03-85: Строительные нормы и правила. Автомобильные
дороги. – М.: ЦНТП Госстроя СССР, 1986: Срок введ. в действие 1.01.86/ Госстрой СССР . – 112 с.
129.
Соколов М. Ю. О Транспортной стратегии России [Электронный ре-
сурс]/ М. Ю. Соколов. – 2012. – Режим доступа: http://portnews.ru.
130.
Сорокин В. Н. Разработка режимных параметров виброплиты при уст-
ройстве грунтовых оснований для вибрационных сейсмических источников:
дис…. канд. техн. наук/ В. Н. Сорокин; СибАДИ. – Омск, 1993. – 198 с.
131.
Сюрье П. Л. Определение толщины слоя грунта, уплотняемого пнев-
моколесными катками, с учетом его напряженного состояния: дис. ... канд. техн.
наук/ П.Л. Сюрье.– Таллин, 1984. – 290 с.
132.
Тарасов В. Н. Грузоподъѐмность шин с жидким балластом/ В. Н. Тара-
сов// Тракторы и сельхозмашины. – 1965. – №8. – С. 35 – 38.
133.
Тарасов В. Н. Исследование влияния основных параметров эластич-
ных колѐс на тяговые качества самоходных землеройных машин: автореф. дис….
канд. техн. наук/ В. Н. Тарасов; СибАДИ. – М., 1965. – 20 с.
134.
Тарасов В. Н., Бояркин Г. Н. Теория удара в теоретической механике и
ее приложение в строительстве: учеб. пособие/ В. Н. Тарасов, Г. Н. Бояркин.–
Омск: ОмГТУ, 1999. – 120 с.
135.
Тимошенко С. П., Гудьер Дж. Теория упругости: пер. с англ./ С. П.
Тимошенко, Дж. Гудьер; под ред. Г. С. Шапиро. – 2-е изд. – М.: Наука, 1979. – 560
с.
279
136.
Тимошенко С. П. Колебания в инженерном деле/ С. П. Тимошенко,
Д. Х. Янг, У. Уивер; под ред. Э. И. Григолюка; пер. с англ. Л. Г. Корнейчука. – М.:
Машиностроение, 1985. – 472 с.
137.
Ульянов Н. А. Основы теории и расчѐта колѐсного движителя земле-
ройных машин / Н. А. Ульянов. – М.: Машгиз, 1962. – 208 с.
138.
Филина В. Н. Транспортная стратегия России: Основные принципы и
приоритетные направления развития инфраструктуры [Электронный ресурс]/
В. Н. Филина. – М., 2013. – Режим доступа: http://www.ecfor.ru.
139.
Филиппов Б. И. Динамические характеристики грунтового основания
при соударении с жѐстким штампом/ Б. И. Филиппов// Автомобильные дороги. –
1966. – №5. – С.27 – 28.
140.
Флорин Н. А. Основы механики грунтов: В 2 т. Т. 1-2./ Н. А. Флорин.
– Л.-М.: Госстройиздат, 1959-1961.– 408 с.
141.
Форсблад Л. Вибрационное уплотнение грунтов и оснований/ Л. Фор-
сблад; пер. с англ. И. В. Гагариной. – М.: Транспорт, 1987. – 188 с.
142.
Фурунжиев Р. И. Автоматизированное проектирование колебательных
систем/ Р. И. Фурунжиев. – Минск: Вышэйна школа, 1977. – 452 с.
143.
Хархута Н. Я. Уплотнение грунтов дорожных насыпей/ Н. Я. Хархута,
Ю. М. Васильев, Р. К. Охраменко. – М.: Автотрансиздат, 1958. – 144 с.
144.
Хархута Н. Я. Влияние давлений в шинах катков на уплотнение грун-
тов/ Н. Я. Хархута// Строительство и дорожное машиностроение. – 1959. – №11. –
С. 23 – 25.
145.
Хархута Н. Я. Требования к машинам для уплотнения грунтов в связи
с повышением норм плотности/ Н. Я. Хархута // Механизированное уплотнение
грунтов в строительстве. – М.: Госстройиздат, 1962. – С. 34 – 35.
146.
Хархута Н. Я. Влияние физико-механических свойств грунтов естест-
венных оснований на их устойчивость и уплотнение/ Н. Я. Хархута, Ю. М. Васильев, В. М. Иевлев// Материалы Всесоюзного совещания по закреплению и уплотнению грунтов: Научно-исследовательская лаборатория гидрогеологич. и ин-
280
женерно-геологич. проблем Грузинск. политехнич. ин-та им. В. И. Ленина. – Тбилиси, 1964. – С. 67 – 69.
147.
Хархута Н. Я. Прочность, устойчивость и уплотнение грунтов земля-
ного полотна автомобильных дорог/ Н. Я. Хархута, Ю. М. Васильев. – М: Транспорт, 1975 – 285 с.
148.
Цытович Н. А. Методы уплотнения грунтов/ Н. А. Цытович// Мате-
риалы Всесоюзного совещания по закреплению и уплотнению грунтов: Научноисследовательская лаборатория гидрогеологич. и инженерно-геологич. проблем
Грузинск. политехнич. ин-та им. В.И. Ленина. – Тбилиси, 1964. – С. 81 – 82.
149.
Щербаков В. С. Экспериментальные исследования колебательных ха-
рактеристик автогрейдера/ В. С. Щербаков, В. А. Байкалов, А. Ф.Байалов и др.;
СибАДИ. – Омск, 1984. –Деп. в ЦНИИИТЭстроймаш,1984, № 81.
150.
Щербаков B.
C. Составление структурных
схем землеройно-
транспортных машин как объектов автоматизации учеб. пособие/ B. C. Щербаков.
— Омск: Изд-во СибАДИ, 2001. 47 с.
151.
Яблонский А. А. Курс теории колебаний: учеб. пособие для студентов
втузов/ А. А. Яблонский, С. С. Норейко. – Изд. 3-е, испр. и доп. – М.: Высшая
школа, 1975. – 248 с.
152.
OF
Ir Kenny Yee, Menard Geosystems Sdn Bhd, Kuala Lumpur UPGRADING
EXISTING
LANDFILLS
BY
DYNAMIC
CONSOLIDATION
A
GEOTECHNICAL ASPECT// Master Builders Journal.−1999.− №9.
153.
Forssblad L. Investigations of soil compaction by vibration/ L. Forssblad;
Royal Swedish Academy of Engineering Sciences.− Stockholm, 1965.
154.
Hal Amick A Frequency-Dependent Soil Propagation Model: Presented at
SPIE Conference on Current Developments in Vibration Control for Optomechanical
Systems, Denver, Colorado, July 20, 1999 [Электронный ресурс]. – Режим доступа:
http://www.vulcanhammer.net/geotechnical/Amick-SPIE99.pdf
155.
Hedekel R./ Some notes of pneumatic tyres/ R. Hedekel// Aircraft Enge-
neering. – 1944. – Vol. XVI.− № 179.
281
156.
Kopf, Fritz. Modelling and simulation of heavy tamping dynamic response
of the ground / Fritz Kopf, Ivan Paulmichl, Dietmar Adam // From Research to Design
in European Practice, Bratislava, Slovak Republic, on June 2-4, 2010 [Электронный
ресурс] – Режим доступа: http:// publik.tuwien.ac.at/ files/PubDat_186214.pdf
157.
Lewis W. A. Investigations of the performance of pneumatictyred rollers in
the compacting of soil// Road research technical paper.− № 45.− U. K., 1959.
158.
Masayuki Sawazaki and Tamotsu Matsui Laboratory Investigation into
Control of Soil Compaction by Resistivity/ Department of Civil and Environmental Engineering; Fukui University of Technology// Proceedings of the Nineteenth International Offshore and Polar Engineering Conference. Osaka, Japan, June 21-26, 2009.
159.
Meijer Alan D. and Heitman Josh L., Soil Facts Managing Equipment
Traffc to Limit Soil Compaction/ Department of Soil Science, North Carolina State
University.− 2010.
160.
Michael C. McVay, EVALUATING THICK LIFT LIMEROCK-BASE
COURSE SR-826: Report, Draft Final Report April 2005. – Miami Florida, 2005. – 92
p.
161.
Mooney M. А and Dietmar Adam Vibratory Roller Integrated Measurement
of Earthwork Compaction: An Overview/ ASCE// FMGM: Seventh International Symposium on Field Measurements in Geomechanics.− 2007.
162.
Mooney, M.A. and Rinehart, R.R. Field Monitoring of Roller Vibration
during Compaction of Subgrade Soil// J. Geotech. & Geoenvironmental Engineering/
ASCE.−2007.−№133(2).− P. 257-265.
163.
Mooney, M.A., and R.V. Rinehart In-Situ Soil Response to Vibratory Load-
ing and Its Relationship to Roller-Measured Soil Stiffness// ASCE J. of the Geotechnical and Geonvironmental Engineering.−2009.− №135(8).− Р. 1022-1031.
164.
Mooney М. А., Robert V. Rinehart, Norman W. Facas, Odon M. Musimbi
Intelligent Soil Compaction Systems// NCHRP Report 676 .−Washington, D. C., 2010.−
166 p.
282
165.
Parsons, Robert L. Compaction and settlement of existing embankments /
Robert L. Parsons, Derek H. Foster, Stephen A. Cross ; Kansas Department of Transportation, University of Kansas Lawrence. – Kansas, 2001. - P. 145.
166.
Pietzsch D. and Poppy W. SIMULATION OF SOIL-COMPACTION
WITH VIBRATORY ROLLERS// Journal of Terramechanics,1992.− №29(6).− P. 585
– 597.
167.
Terzaghi K. Soil mechanics in engineering practice/ Terzaghi K. and Peck
R. – John Wiley and Sons, New York, 1969
168.
Thurner, H.F. Continuous Compaction Control / H.F. Thurner, Å.
Sandstrom // CCC, European Workshop Compaction of Soils and Granular Materials,
Presses Ponts et Chaussées. – Paris, 2000. – Р. 237-246.
169.
Rinehart, R.V. Instrumentation of a roller compactor to monitor vibration
behavior during earthwork compaction / R.V. Rinehart, M.A. Mooney // Proc., 22nd
Int. Symp.on Automation and Robotics in Construction, Ferrara, Italy. – 2005. – Р. 6.
170.
Rinehart, R.V. Instrumentation of a roller compactor to monitor vibration
behavior during earthwork compaction// J. Automation in Construction. – 2008.− №
17(2).− Р. 144-150.
171.
Rinehart, R.V. Measurement depth of vibratory roller-measured soil stiff-
ness // Geotechnique. – 2009. – №59(7). – P. 609-619.
172.
Yoo T-S, Selig E.T. Dynamics of Vibratory-Roller Compaction// ASCE J.
of the Geotechnical Engineering Division.−1979.− № 105 (GT10).− Р.1211-1231.
283
ПРИЛОЖЕНИЕ 1
ЛИСТИНГИ
реализации математического моделирования в программной среде MAPLE 11.0
> restart: % Очиска памяти
> % Задание начальных параметров
E_01:=60000000; % Модуль деформации рабочего органа
E_02:=30000000; % Модуль деформации грунта
L:=1; % Ширина рабочего органа
eta_0:=100000;% Коэффициент динамической вязкости грунта
F_0:=100000;% Модуль вынуждающей силы
R:=0.60;% Радиус рабочего органа
h_0:=0.5;% Начальная толщина слоя грунта
h_00:=0.5;% Вспомогательный параметр - текущая толщина грунта
x_0:=0.015;% Смещение рабочего органа
omega:=250;% Круговая частота динамического воздействия
> % Процедура вычисления жесткости рабочего органа
C_01 := proc (x)
C_01:=E_01*L*sqrt(2*x/R);
end proc:
> % Процедура вычисления жесткости грунта
C_02 := proc (x,k)
E_02:=0.0003*exp(11.522*k):
C_02:=E_02*L*(2*sqrt(2*x*R)+h_0*0.1)/h_0;
end proc:
> % Процедура вычисления вязкости грунта
eta := proc (x)
eta:=eta_0*L*(2*sqrt(2*x*R)+h_0*0.1)/h_0;
end proc:
> %Задание величины коэффициента уплотнения
и начальной плотности грунта
284
alpha:=evalf(1870/2200);
> % Процедура вычисления циклического смещения
for i from 1 to 1000 do
x_2:=C_01(x)/C_02(x)*x:
% Вычисление смещения рабочего органа
xx:=solve(C_01(x)*x+C_02(x,h_00*alpha/h_0)*x_2+eta(x)*omega*x_2/4F_0*(x+x_2)/x_0,x):
% Выбор положительного решения
if xx[1]>xx[2] then x_1:=xx[1] else x_1:=xx[2]: end if:
%Вычисление смещения грунта
x_2:=C_01(x_1)/C_02(x_1)*x_1:
%Вычисление нового значения толщины грунта
h_0:=h_0-x_2:
%Вывод на экран достигнутого на данном цикле коэффициента уплотнения, контактного напряжения, смещения и виброускорения
print(h_00*alpha/h_0,
((F_0*(x_1+x_2)/x_0))/((2*sqrt(2*R*x_1+x_1^2))),h_00h_0,x_2*omega^2);#k,sigma,A
%Запись в файл результатов вычисления смещения
fd := fopen(comp,WRITE,TEXT):
writedata(fd,h_00-h_0);
fclose(fd);
%Проверка выполнения условия на коэффициент уплотнения
и вывод на экран результатов вычислений
if h_0/h_00-alpha<0 then
print(h_0,h_0/h_00al-
285
pha,i,2*sqrt(2*R*x_1+x_1^2),((omega/6.28)/(i))*3.6*2*sqrt(2*R*x_1+x_
1^2),C_01(x_1),C_02(x_2)*(x_2),C_01(x_1)*x_1):
break: end if:
od;
Реализация процедуры оптимизации параметров катка
> restart;
> with(LinearAlgebra):
> A_2 := Matrix([[6000, 100, 30,
32],[6000,
50,
30,
17],[6000,
20],[6000,
50,
100, 40,
40,
36]]);
> x_2 := LinearSolve(A_2,b_2);
> with(Optimization):
Interactive(.183333333333333331e-2*c+1/25*F_0+(-3/4)*f+0.5*n,
{.183333333333333331e-2*c+1/25*F_0+(-3/4)*f+0.5*n>=1, c=0..10000,
F_0=0..200, f=0..100, n=0..30});
[1,000000000000[c=5000.,f=40.,n=18.,F_0=100.]]
> A_2 := Matrix([[6000, 100, 30,
50,
30,
20],[6000,
50,
> x_2 := LinearSolve(A_2,b_2);
8],[6000, 100, 40,
40,
15]]);
13],[6000,
286
> with(Optimization):
Interactive(.141666666666666677e-3*c+(-.200000000000000048e2)*F_0+(.250000000000000014e-1)*f+(-.500000000000000028e-1)*n,
{.141666666666666677e-3*c+(-.200000000000000048e2)*F_0+(.250000000000000014e-1)*f+(-.500000000000000028e-1)*n>=1,
c=0..10000, F_0=0..200, f=0..100, n=0..30});
[0,99999999999999999[c=6100.,f=42.,n=15.,F_0=49,7.]]
287
ПРИЛОЖЕНИЕ 2
АКТЫ ИСПЫТАНИЙ
288
289
АКТ
Экспериментальных исследований шин, оборудованных бандажами, размерностью 240 – 508
Объект исследований
Для экспериментальных исследований были предоставлены пневматические
шины 240 – 508 ГОСТ, оборудованные металлическими бандажами
Цель исследований
Определение параметров жесткости и вязкости пневмошины, оборудованной бандажами, 240 – 508 ГОСТ
Условия проведения исследований
Исследования были проведены на базе ФГБОУ ВПО «СибАДИ» г. Омск в
период времени с 14.06.2011 по 28.07.2011 г. Была сконструирована экспериментальная установка на основе бортового измерительного комплекса (изготовитель
ФГУП «Научно-исследовательский тракторный институт НАТИ»), измерителя
вибрации ВШВ-003-М2 с виброизмерительным преобразователем - акселерометром ДН-3-М1 для регистрирования параметров деформации рабочего органа при
воздействии на него ударного импульса. Рассматривалось различное количество
установленных бандажей и давление в шинах. Полученные данные позволили определить реологические характеристики вальца.
290
Результаты испытаний
Коэффициенты вязкого трения b2 (Нс/м) и жесткости с2 (кН/м) пневмошины, оборудованной съемными бандажами, при различном внутреннем давлении.
Количество
Давление в шине
Давление в шине
Давление в шине
установленных
рw = 0,2 МПа
рw = 0,4 МПа
рw = 0,6 МПа
бандажей
N, шт.
с2, кН/м b2, Нс/м с2, кН/м b2, Нс/м с2, кН/м b2, Нс/м
2
338
2950
510
2750
773
1910
4
412
2885
800
2705
1105
1725
6
470
2800
1400
2650
2100
1500
8
523
2715
2100
2580
3540
1235
10
578
2615
2824
2475
4780
920
12
600
2500
3340
2350
5400
540
Зав. каф. «ЭСМ и К»
д.т.н. проф.
Зав. лабораторией
«Диагностика и ТОМ»
к.т.н., доц.
В.Б. Пермяков
Ю.В. Кюнель
С.В. Савельев
291
АКТ
Экспериментальных исследований шин, оборудованных бандажами, размерностью 240 – 508
Объект исследований
Для экспериментальных исследований были предоставлены пневматические
шины 240 – 508 ГОСТ, оборудованные металлическими бандажами
Цель исследований
Определение влияния оборудования бандажами пневматической шины на
распространение колебаний в грунте.
Условия проведения исследований
Исследования были проведены на базе ФГБОУ ВПО «СибАДИ» г. Омск в
период времени с 14.06.2011 по 28.07.2011 г. Была сконструирована экспериментальная установка для регистрации колебаний в толще грунта измерителем вибрации ВШВ-003-М2 с виброизмерительным преобразователем - акселерометром
ДН-3-М1. Рассматривалось различное количество установленных бандажей и
давление в шинах.
292
Результаты испытаний
Значения виброускорения (м/с2) по толщине грунта (суглинок) в зависимости от
внутреннего давления в шине (рw, МПа) и количества установленных бандажей
(N, шт.)
Количество уста-
Количество уста-
новленных банда-
новленных банда-
жей
жей
N = 6 шт.
N = 12 шт.
Глубина измерений, м
Пневматическая
шина
без бандажей
0,10
рw = 0,4
МПа
48
рw = 0,6
МПа
64
рw = 0,4
МПа
102
рw = 0,6
МПа
147
0,15
37
52
97
141
37
0,20
29
38
95
136
15
0,25
10
25
83
130
0
0,30
0
10
72
125
–
0,35
–
0
65
121
–
0,40
–
–
55
90
–
0,45
–
–
0
70
–
0,50
–
–
–
0
–
рw = 0,5 МПа
50
293
Значения виброускорения (м/с2) по толщине грунта (супесь) в зависимости от
внутреннего давления в шине (рw, МПа) и количества установленных бандажей
(N, шт.)
Количество уста-
Количество уста-
новленных банда-
новленных банда-
жей
жей
N = 6 шт.
N = 12 шт.
Глубина измерений, м
Пневматическая
шина
без бандажей
0,10
рw = 0,4
МПа
36
рw = 0,6
МПа
49
рw = 0,4
МПа
75
рw = 0,6
МПа
109
0,15
23
28
70
103
20
0,20
29
25
68
100
10
0,25
17
12
55
94
0
0,30
0
0
47
85
–
0,35
–
–
38
79
–
0,40
–
–
20
54
–
0,45
–
–
0
34
–
0,50
–
–
–
0
–
Зав. каф. «ЭСМ и К»
д.т.н. проф.
Зав. лабораторией
«Диагностика и ТОМ»
к.т.н., доц.
рw = 0,5 МПа
38
В.Б. Пермяков
Ю.В. Кюнель
С.В. Савельев
294
АКТ
Экспериментальных исследований шин, оборудованных бандажами, размерностью 240 – 508
Объект исследований
Для экспериментальных исследований были предоставлены пневматические
шины 240 – 508 ГОСТ, оборудованные металлическими бандажами
Цель исследований
Определение эмпирического коэффициента восстановления для определения коэффициента жесткости пневматической шины, оборудованной бандажами.
Условия проведения исследований
Исследования были проведены на базе ФГБОУ ВПО «СибАДИ» г. Омск в
период времени с 11.08.2011 по 20.08.2011 г. Была сконструирована экспериментальная установка для регистрации угла отклонения груза до и после динамического воздействия им на рабочий орган. Рассматривалось различное количество
установленных бандажей и давление в шинах.
295
Результаты испытаний
Сравнительные данные kвосст для опытного образца
Начальный угол
kвосст
отклонения груза
Q0, град
Угол отклонения
груза после уда-
b2,
с2 ,
N,
ра
кНс/м
кН/м
шт.
Q1, град
0,61
35
0,54
5400
12
0,47
25
0,92
4780
10
0,38
20
1,24
3540
8
0,19
10
1,50
2100
6
55
Зав. каф. «ЭСМ и К»
д.т.н. проф.
Зав. лабораторией
«Диагностика и ТОМ»
к.т.н., доц.
В.Б. Пермяков
Ю.В. Кюнель
С.В. Савельев
296
АКТ
Экспериментальных исследований шин, оборудованных бандажами, размерностью 240 – 508
Объект исследований
Для экспериментальных исследований были предоставлены пневматические
шины 240 – 508 ГОСТ, оборудованные металлическими бандажами
Цель исследований
Определение параметров отпечатка пневматической шины, оборудованной
бандажами, с опорной поверхностью при статическом нагружении.
Условия проведения исследований
Исследования были проведены на базе ФГБОУ ВПО «СибАДИ» г. Омск в период
времени с 15.09.2011 по 25.09.2011 г. Была сконструирована экспериментальная
установка для нагружения пневматической шины, оборудованной бандажами, железо–бетонными балками общим весом 600 кг с последующим измерением параметров отпечатка. Рассматривалось различное количество установленных бандажей.
297
Результаты испытаний
Величины площади контакта экспериментального рабочего органа с поверхностью материала S, м2 и контактного давления ζ МПа при нагрузке на площадь
контакта Fст = 6 кН
Количество ус-
Внутреннее давление в шине pw, МПа
тановленных
0,4
0,6
бандажей
N, шт.
S, м2
, МПа
S, м2
, МПа
6
0,138
0,043
0,114
0,053
8
0,102
0,059
0,075
0,082
10
0,080
0,075
0,053
0,113
12
0,059
0,102
0,035
0,174
Зав. каф. «ЭСМ и К»
д.т.н. проф.
Зав. лабораторией
«СК»
к.т.н., доц.
В.Б. Пермяков
Г.В. Нестеренко
С.В. Савельев
298
299
300
301
302
ПРИЛОЖЕНИЕ 3
РАСЧЁТ ЭКОНОМИЧЕСКОГО ЭФФЕКТА
ОТ ИСПОЛЬЗОВАНИЯ НОВОЙ ТЕХНИКИ
За критерий эффективности внедрения результатов исследований в данном
приложении принимается экономический эффект от использования предлагаемого катка.
П.1. Расчѐт экономической эффективности в сравнении с импортным аналогом
П.1.1. Выбор базового катка
В экономическом расчѐте в виде аналога адаптивного дорожного катка принимается вибрационный пневмошинный каток SAKAI GW-750 (Япония) розничная цена которого на август 2013 г. составляла около 3 000 000 руб.
В качестве базовой машины для изготовления адаптивного катка принимается пневмошинный ДУ-101 ЗАО Раскат (г. Рыбинск) цена машины на август 2013
г. составляла 1 750 000 руб.
П.1.2. Определение годовой производительности базового и предлагаемого
катка
Эксплуатационная производительность дорожного катка определяется из выражения [51]:
П экс
L уч (L A пер )h 0 k в
,
L уч
(
)n
(П. 1.1)
где Lуч – длина укатываемого участка, м; L – ширина укатываемой полосы, м;
Апер – величина перекрытия, м (Апер=0,2м); h0 – оптимальная толщина слоя, м; кв –
коэффициент использования рабочего времени, (кв=0,85); - рабочая скорость
303
катка, м/ч; n – необходимое число проходов для достижения нормативной плотности.
Принимая длину технологической захватки Lуч=200 м, толщину слоя h0=0,35
м., определим производительность:
для адаптивного катка:
Падап
экс
200(1,58 0,2) 0,4 0,85
170 м3/ч
200
11
4000
для адаптивного катка SAKAI GW-750
Пsakai
экс
200(1,58 0,2) 0,35 0,85
101 м3/ч
200
16
3500
Количество часов работы катка за год составляет:
Tг (Тс Дв Д р )t смКсм ,
(П.1.2)
где Тс – продолжительность строительного сезона для Омской области,
Тс=184 дня; Дв – количество выходных и праздничных дней, Дв=55 дней; tсм –
продолжительность смены, tсм=8,2 ч.
Получим для пятидневной рабочей недели:
Tг (184 55 6)8,2 1,5 1513 ч/год.
Отсюда годовая эксплуатационная производительность составляет
Пэкс.г ПэксТг ,
Для адаптивного катка:
3
Падап
экс.г 170 1513 257210 м /год.
Для Sakai:
3
Пsakai
экс.г 101 1513 152813 м /год.
(П.1.3)
304
П.1.3. Определение розничной цены
Поскольку завод «Раскат» использует модульную систему при производстве
уплотняющей техники, базовый каток ДУ-100 находится в большой степени унификации с вибрационными катками, поэтому оснащение его вибровозбудителем и
системой изменения жѐсткости рабочего органа не вызовет значительных затрат.
Цена нового адаптивного катка не должна значительно превышать стоимость аналога и составит не более 2 000 000 руб.
П.1.4. Расчѐт удельных приведѐнных затрат
Удельные приведѐнные затраты определяться зависимостью:
К уд
Ца
,
П экс.г .
(П.1.4)
где а – коэффициент учитывающий затраты на транспортировку машины с
завода, а=1,05..1,07.
Для адаптивного катка:
К буд
2000000 1,05
8,1 руб/м3,
257210.
Для SAKAI GW-750:
К в.г.ш
уд
3000000 1,07
21,0 руб/м3.
152813.
Стоимость машиносмен для сравниваемых катков будет одинаковая, т. к. они
отличаются только конструкцией вальцов. Согласно СниП 3. 06. 03.-85 /89/
sakai
Cадап
см Ссм 1850 руб.
Стоимость единицы продукции сравниваемых машин будет равна:
305
Се
Ссм
,
э
П см
(П.1.5)
э
где Псм
- сменная производительность катка, м3/см.
Для адаптивного катка:
э
=1394 м3/см,
Псм
Се
1850
1,32 руб/м3.
1394
Для SAKAI GW-750:
э
=828,2 м3/см,
Псм
Се
1850
2,24 руб./м3.
828,2
Удельные приведѐнные затраты для сопоставляемых машин будут равны:
Zуд Се ЕнК уд ,
(П.1.6)
где Ен – нормативный коэффициент эффективности, Ен=0,15.
Для адаптивного катка:
Zуд 1,32 0,15 8,1 2,53 руб/м3.
Для SAKAI GW-750:
Zуд 2,24 0,15 21 5,39 руб/м3.
Экономический эффект определится:
адап
Э (ZSakai
Zадап
уд
уд )П экс
(П.1.7)
Э (5,39 2,53)257210 650735 руб/год.
Таким образом, годовой доход предприятия от использования одного катка
составит не менее 600 000 рублей.
306
П.2. Расчѐт экономической эффективности от замещения двух отечественных
катков
П.2.1. Выбор базового катка
В соответствии со СНиП 3.06.03-85 для уплотнения земляного полотна автомобильной дороги от свежеотсыпанного состояния до нормативной плотности
необходимо использовать два типа дорожных катков: средний и тяжѐлый в нашем
случае это ДУ-99 (10 т.) 2 000 000 руб. и ДУ-100 (16 т.) 1 750 000 руб.
В качестве базовой машины для изготовления адаптивного катка принимается пневмошинный ДУ-101 ЗАО Раскат (г. Рыбинск) цена машины на август 2013
г. составляла 1 750 000 руб., с учѐтом конструктивных изменений 2000000 руб.
П.2.2. Определение годовой производительности базовых и предлагаемого
катков
Эксплуатационная производительность дорожного катка определяется из выражения (П. 1.1):
для адаптивного катка:
Падап
экс
200(1,58 0,2) 0,4 0,85
170 м3/ч
200
11
4000
для катка ДУ - 99
99
П ду
экс
200(1,58 0,2) 0,4 0,85
164 м3/ч
200
10
3500
для катка ДУ - 100
100
П ду
экс
200(1,58 0,2) 0,4 0,85
170 м3/ч
200
11
4000
307
Количество часов работы катка за год составляет (П.1.2):
Получим для пятидневной рабочей недели:
Tг (184 55 6)8,2 1,5 1513 ч/год.
Годовая эксплуатационная производительность составляет (П.1.3)
Для адаптивного катка:
3
Падап
экс.г 170 1513 257210 м /год.
для катка ДУ - 99:
3
99
Пду
экс.г 164 1513 248981 м /год.
для катка ДУ - 100
100
Пду
экс.г 170 1513 257210
П.2.3. Определение розничной цены
П.2.4. Расчѐт удельных приведѐнных затрат
Удельные приведѐнные затраты определяться зависимостью (П.1.4):
Для адаптивного катка:
К адап
уд
2000000 1,05
8,1 руб/м3,
257210.
99
К ду
уд
2000000 1,05
8,4 руб/м3.
248981.
для катка ДУ - 99:
для катка ДУ – 100
100
К ду
уд
1750000 1,05
7,14 руб/м3,
257210.
Стоимость машиносмен для сравниваемых катков отличается незначительно.
Согласно СниП 3. 06. 03.-85 /89/.
ду99
Cадап
1850 руб.
см Ссм
308
ду100
Ссм
1950
Стоимость единицы продукции сравниваемых машин будет равна (П.1.5):
Для адаптивного катка:
э
=1394 м3/см,
Псм
Се
1850
1,32 руб/м3.
1394
Се
1850
1,23 руб./м3.
1500
Для катка ДУ – 99:
э
=1500 м3/см,
Псм
Для катка ДУ – 100:
э
=1394 м3/см,
Псм
Се
1950
1,4 руб./м3.
1394
Удельные приведѐнные затраты для сопоставляемых машин по (П.1.6):
Для адаптивного катка:
Zуд 1,32 0,15 8,1 2,53 руб/м3.
Для катка ДУ – 99:
Zуд 1,23 0,15 8,43 2,50 руб/м3.
Для катка ДУ – 100:
Zуд 1,4 0,15 7,14 2,47 руб/м3.
309
Экономический эффект от замещения двух катков:
100
адап
Э (ZДУ-99
ZДУ
Zадап
уд
уд
уд )2П экс
(П.1.8)
Э (2,37 2,50 2,53)2 257210 1203740 руб/год.
Таким образом, доход предприятия от использования одного нового адаптивного катка, вместо двух рекомендуемых СНиПом составит не менее, 1200 000
рублей.
310
ПРИЛОЖЕНИЕ 4
ПРИМЕР РАСЧЁТА ПАРАМЕТРОВ ВИБРАЦИОННОГО КАТКА
С ПНЕВМОШИННЫМ РАБОЧИМ ОРГАНОМ
Обобщение полученных результатов позволяет провести расчѐт рациональных параметров вибрационных катков с пневмошинными рабочими органами.
1. Обоснование величины контактных напряжений
Для вибрационного катка с вальцом на базе пневмошин 10,00 – 20 (508 -240)
шириной 1,5 м при уплотнении супесчаного грунта оптимальной влажности, воспользуемся результатами проведѐнных исследований. Рассмотрим зависимости
изменения параметра пятна контакта от количества проходов и жѐсткости рабочего органа.
В соответствии с проведѐнными исследованиями при уплотнении грунтов
необходимо изменять жѐсткость свойства РО в зависимости от стадии уплотнения
таблица 1.
В первую очередь необходимо определить эквивалентную массу способную
проработать уплотняемый материал на последней стадии уплотнения, когда он
обладает максимальным пределом прочности. Предел прочности супеси, соответствующий коэффициенту уплотнения ку=1,0 составляет около 0,7 МПа [84, 131,
135]. В соответствии с условием т (t)пр (t) обеспечения эффективного деформирования грунта по В. Б. Пермякову [84] площадь контакта и масса катка
должны обеспечивать соответствующие этому условию контактные напряжения.
Как показывают многочисленные исследования [65 –67] статическая масса по
отношению к массе вибрационного катка, может быть уменьшена в 3 раза. С учѐтом допущения о прямоугольной форме пятна контакта и известной ширине вальца, неизвестной величиной является изменяемая в процессе уплотнения длина
контакта d.
311
Таблица 1 – Значения жесткости РО на разных стадиях процесса уплотнения
Жѐсткость РО, кН/м
Стадия процесса уплотнения
Несвязанный грунт
Связанный грунт
Начальная, ку=(0,85 - 0,90)
600 - 1000
600 - 1000
Средняя, , ку=(0,90 - 0,95)
4000 - 5000
3000 - 4000
Заключительная, ку=(0,95 - 1,0)
5000 - 6000
4000 - 5000
Зависимость параметра контакта d от жѐсткости РО адаптивного катка можно
определить по эмпирической формуле, полученной по результатам экспериментальных исследований [113].
d 17,91c10,5962 ,
(1)
где с1 – жѐсткость РО, кН/м.
Определим необходимую массу катка для проработки грунта на заключительной стадии уплотнения, с учѐтом использования вибрации и максимальных
контактных напряжений.
M
пр
g
Ld ,
(2)
где M - необходимая статическая масса катка, кг; ζпр – предел прочности материала, при ку=1, Н/м2; L – ширина рабочего органа, м; d – длина контакта, м (по
сути – это величина длины контакта на жѐстком основании); g – ускорение свободного падения, м/с2.
d 17,91 6000( 0,5962) 0,1 м,
M
700000
0,1 1,5 10700 кг.
9,81
С учѐтом интенсификации процесса уплотнения, за счѐт применения вибрации, статическая масса катка должна быть уменьшена в 3 раза.
M экв 10700 / 3 3567 кг.
Необходимая эквивалентная статическая масса составит 3600 кг.
Далее необходимо проверить статическую массу по условию т (t)пр (t)
312
на контактные напряжения в начале процесса уплотнения, когда грунт обладает
низким пределом прочности.
d 17,911000( 0,5962) 0,29 м,
M экв g 3600 9,81
811186 Н/м2 (0,08 МПа).
dL
0,29 1,5
Контактные напряжения не превышают предела прочности супесчаного
грунта в начале процесса уплотнения 0,08<0,4 МПа.
Определим параметр контакта d и контактные напряжения на среднем этапе
уплотнения супесчаного грунта
d 17,91 4000( 0,5962) 0,13 м
3600 9,81
181107 Н/м2 (0,18 МПа)
0,13 1,5
На основании полученных данных можно дать рекомендации по адаптации
контактных напряжений катка с адаптивными рабочими органами при уплотнении супесчаного грунта:
- первые проходы каток должен совершать при максимально возможном пятне контакта (при ширине рабочего органа 1,5 м длина контакта должна составлять
0,29 м), что соответствует жѐсткости 1000 кН/м (вибрацию можно не применять);
- в дальнейшем необходимо повысить контактные напряжения длина контакта при неизменной ширине РО должна составлять около 0,13 м, что соответствует
жѐсткости рабочего органа 4000 кН/м (необходимо использовать вибрацию);
- заключительные проходы необходимо выполнять при максимальных контактных напряжениях, длина контакта 0,1 м, жѐсткость не менее РО 6000 кН/м
(необходимо использовать вибрацию).
2. Обоснование параметров вибрации
Проиллюстрируем практическое применение методического подхода к обоснованию вибрационных параметров изложенного в п. 6.1.3.
313
Необходимо оценить значение вынуждающей силы на финальном этапе процесса уплотнения. Сопротивление грунта деформированию в этом случае велико,
и как было определено ранее, жѐсткость рабочего органа должна быть максимально приближена жѐсткости металлического, диссипация энергии вибровозбудителя должна быть минимальной. Предел прочности супеси при ку=1,0 и оптимальной влажности составляет 0,7 МПа. Необходимая площадь контакта при ширине вальца 1,5 м, в соответствии выполненными расчѐтами 0,15 м2. Воспользуемся неравенством (6.18).
0,7 106 0,15 F0
15000 0,15 320 9,81 3600 9,81 tg12
0,025 3600 ,
0,19 1700
где ζпр=0,7 МПа; С=15000, Н/м2; S =0,125, м2; Н; ρ=1700 кг/м3; θ =120; m =320
кг; M =3600 кг; V=0,19 м3; g = 9,81, м/с2.
105000 H F0 18501 H .
Таким образом, значение величины вынуждающей силы вибровозбудителя
должно быть не менее 18 кН и не более 105 кН (максимальное значение соответствует заключительной стадии процесса уплотнения).
Поскольку в работе была определена частота вибровозбудителя 40 Гц [114],
необходимая для проработки супесчаного грунта в конце процесса уплотнения,
определим момент дебалансов вибрационного катка по формуле (6.20).
mд rд
50000
0,009 кг·м
(2400)2
3 Определение рациональной скорости катка
Рациональная скорость катка определяется временем, необходимым для достижения требуемого коэффициента уплотнения при виброобработке грунта с учѐтом изменения его свойств. Воспользуемся формулой (6.22).
6,62 c10,5962
EL
.
M
314
Уплотняется супесчаный грунт, влажность W=14%; ширина рабочего органа
L=1,5 м.; модуль деформации, Е=f(ку); M=3600 кг.
На начальном этапе уплотнения:
6,62 1000 0,5962
10 106 1,5
6,9 км/ч.
3600
Средний этап уплотнения:
6,62 4000
0,5962
20 106 1,5
4,2 км/ч.
3600
Заключительный этап уплотнения:
6,62 6000
0,5962
30 106 1,5
4,0 км/ч.
3600
Полученные данные были подтверждены экспериментально, что позволяет
говорить о возможности виброуплотнения грунтов от свежеотсыпанного состояния до нормативной плотности одним катком с адаптивными рабочими органам.
Применение предложенной методики при уплотнении различных грунтовых сред
позволяет повысить производительность катков, снизить энерго- и трудозатраты,
улучшить технологию работ.
315
ПРИЛОЖЕНИЕ 5
ПАТЕНТЫ
316
317
318
319
320
ПРИЛОЖЕНИЕ 6
АКТЫ ВНЕДРЕНИЯ
Акт внедрения в производство
вибрационного гидрошинного катка
Мы, нижеподписавшиеся,
А. В. Кириллов – заместитель главного инженера по новой технике,
В. В. Белов – начальник отдела новой технике,
И. О. Мостяев – инженер отдела новой техники
Составили настоящий акт в том, что согласно плана по освоению новой
техники и договора «Создание научно – технической продукции (согласно техническому заданию) на изготовление вибрационного гидрошинного катка на базе
ДУ – 98» с Сибирской автомобильно–дорожной академии (СибАДИ) ЗАО «Раскат» производится внедрение в производство вибрационного гидрошинного катка.
А. В. Кириллов
____________ «_____»2003 г.
В. В. Белов
____________ «_____»2003 г.
И. О. Мостяев
____________ «_____»2003 г.
321
Акт приемки методики к внедрению
Мы, нижеподписавшиеся члены научно – технического Совета ЗАО
«РАСКАТ» Кириллов А.В. , Белов В. В., Мостяев И. О., рассмотрели методику
определения рациональных параметров и описание конструкции вибрационного
гидрошинного катка, разработанные Савельев С. В., Захаренко А. В., Пермяковым
В.Б. в Сибирской государственной автомобильно – дорожной академии (СибАДИ).
Проведенный анализ представленных результатов исследований позволил
сделать следующий вывод :
положения методики являются актуальными и могут быть учтены при
производстве вибрационного гидрошинного катка.
Зав. главного инженера
А. В. Кириллов
Начальник НТО
В. В. Белов
Инженер НТО
И. О. Мостяев
322
323
324
325
326