Сглаживание и переразбиение
advertisement

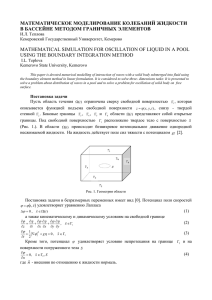
Задача о погружении клина в идеальную несжимаемую жидкость с равномерной скоростью. Впервые задача о погружении клина была впервые рассмотрена Вагнером в 30-х годах XX века. Задача относится к классу нелинейных задач с нестационарными свободными границами. Постановка задачи В расчётной области D (рис. 1 ), ограниченной свободной поверхностью SF , клином S B и границей далёкого поля решается уравнение Лапласа 0, z D (1) Граница SF является свободной поверхностью жидкости. На клине выполняется граничное условие sin( )s , z S B (2) где - угол полураствора клина. В данной работе 45 . На свободной границе выполняются кинематическое и динамическое условия dz dt u iv, z S F (3) d dt 12 Fr 2 , z S F (4) 2 y На границе далёкого поля выполняется динамическое условие d dt 12 , z 2 (5) Краевая задача (1)-(5) для потенциала скоростей записана в безразмерном виде, где в качестве характерных величин выбираются ускорение свободного падения g и глубина начального заглубления клина H . Клин погружается со скоростью V 1 . Рис. 1 Алгоритм движения по времени Краевая задача (1)-(5) является нестационарной. Время явно входит только в граничные условия (3), (4), представляющие собой обыкновенные дифференциальные уравнения первого порядка, для интегрирования которых используется метод Эйлера. Пусть в некоторый момент времени t k заданы положение свободной границы SF и распределение потенциала k на ней. Необходимо решить уравнение Лапласа (1) с условием k на SF и условием (2) на S B . Новое положение свободной поверхности и распределение потенциала на ней для момента времени tk можно вычислить, используя условия (3) и (4), дискретный аналог которых расписывается по схеме Эйлера следующим образом: (6) x k 1 x k ( ) , 2 k 0,1, 2,..., (7) k 1 k ( 12 ( )k Fry ) , где x k , k - значения функций на k -ом шаге по времени. В результате на каждом шаге по времени t k решается смешанная краевая задача для уравнения Лапласа (1) с граничными условиями (6) и (7). k 2 Численное моделирование На каждом шаге по времени комплексным методом граничных элементов решается граничное интегральное уравнение (записанное по границе S F S B ), к которому сводиться уравнение Лапласа внутри области D . Применяя интегральную формулу Коши, можно записать w( z0 ) ( z10 )i wz ( zz0) dz, (8) C ( z0 ) 2 для внутренней точки, ( z0 ) для точки на гладкой где границе C , ( z0 ) для угловой точки вершины C ( - угол при вершине). Для численного решения интегрального уравнения граница заданной области разбивается на ряд граничных элементов, в пределах которых функции и изменяются линейно по длине элемента. В результате решение граничного интегрального уравнения сводится к системе линейных алгебраических уравнений (СЛАУ) для нахождения неизвестных значений потенциала и функции тока в узлах элементов. Двойные узлы При решении гидродинамических задач численными методами приходится сталкиваться с проблемой удовлетворения граничных условий в угловых точках, принадлежащих одновременно свободной поверхности и твёрдой стенке. Некорректное обращение с данными узловыми “особенностями” существенно влияет на точность полученных результатов и устойчивость алгоритма при моделировании свободных границ. В методах граничных элементов обойти указанные сложности удается с помощью введения двойных узлов. Пусть двойной узел описывается тождеством zm zm1 . Предположим, что zm C1 , и в этом узле задан потенциал m , а zm1 C2 , и в нём задана функция тока m1 . Тогда в двойном узле будут выполняться естественные условия m m1 , m1 m . Алгоритм вычисление поля скоростей Для решения поставленной задачи необходимо вычислять компоненты вектора . Их будем вычислять по следующим формулам: x y x y x y s s s n s s s s s , (9) y x y x (10) s n s s s s s где s - единичный вектор касательной, n - единичный вектор внешней нормали. Обход по границе области осуществляется против часовой стрелки. Для вычисления узловых значений компонент вектор используется подход, изложенный в [1]. Суть его состоит в том, что строится отображение элемента границы области на пространство номеров узлов. Тогда в силу того, что ( x, y, t ), ( j , t ), ( x, y, t ), ( j, t ), x x(t ), x x( j ), , y y (t ), y y( j) . И следовательно s x s где ( j / sj ), s y s ( xj / sj ), ds dj dx dj 2 dy dj ( j / sj ), (11) ( yj / sj ), (12) 2 . Остаётся определить значения j , j , xj и yj . Так как j - номер точки на числовой оси, то мы имеем дело с дифференцированием указанных функций на равномерной сетке с шагом 1 . Для нахождения первых производных воспользуемся формулами численного дифференцирования 5 –го порядка точности: f0 121 (25 f0 48 f1 36 f 2 16 f3 3 f4 ), (13а ) f1 121 (3 f 0 10 f1 18 f 2 6 f3 f 4 ), (13б ) f 2 121 ( f 0 8 f1 8 f3 f 4 ), (13в ) f3 121 ( f 0 6 f1 18 f 2 10 f 3 3 f 4 ), (13г ) f 4 121 (3 f 0 16 f1 36 f 2 48 f3 25 f 4 ). (13д) Используя формулы (11) , (12) , можно получить дискретные значения для выражений, описываемых формулами (13) . Сглаживание и переразбиение Сглаживание и переразбиение на обновлённой свободной поверхности выполняются на каждом шаге по времени. Вычислительные неустойчивости могут быть предотвращены с помощью этих двух численных методов. После каждого шага по времени появится пилообразная неустойчивость профиля свободной поверхности. Причиной этой неустойчивости является то, что интегральное уравнение решается численным методом. Неустойчивости могут быть удалены с помощью сглаживания (Лонгье-Хиггинс [2]). Здесь применяется формулы пятиточечной схемы третьего порядка Маруо и Сонга [3]. f1 701 (69 y1 4 y2 6 y3 4 y4 y5 ) (14 а ) f2 (2 y1 27 y2 12 y3 8 y4 2 y5 ) (14б ) fi 351 (3 yi 2 12 yi 1 17 yi 12i 1 3 yi 2 ) (14в ) f N 1 (14г ) 1 35 1 35 (2 yN 4 8 yN 3 12 yN 2 27 yN 1 2 yN ) f N 701 ( yN 4 4 yN 3 6 yN 2 4 yN 1 69 yN ) (14д) где yi (i 1, 2,..., N ) исходные значения до сглаживания, fi (i 1, 2,..., N ) значения после сглаживания. N-число узлов на свободной поверхности. Первые два уравнения используются для сглаживания первых двух узлов, последние два для последних двух. Третье уравнение используется для всех точек из интервала i 3,..., N 2 . Сглаживание не применяется к точке пересечения жидкости и клина и к точке на границе свободной поверхности и границы далёкого поля, так как положение этих точек не должно изменятся. После обновления свободной поверхности на каждом шаге по времени, узлы могут встать слишком близко друг другу или слишком далеко друг от друга, что может привести к численной неустойчивости. В таких случаях, свободную поверхность можно переразбить. Для интерполяции новых точек на свободной поверхности используется аппроксимация кубическими сплайнами. Переразбиение происходит в 3 шага. На первом шаге происходит вычисление кубических сплайнов свободной поверхности с полигональной длиной в качестве параметра. Второй шаг состоит в вычислении длины дуги свободной поверхности и формулируется кубическая аппроксимация по длине дуги (естественная параметризация). Третьим шагом является перераспределение узлов на свободной поверхности путём деления на равные дуги. На первом шаге у нас известны позиции всех узлов на свободной поверхности. Полигональная длина дуги от первой точки свободной i , xi и yi поверхности будет рассчитывается как qi . На отрезке координаты могут быть записаны как xi (q) axi bxi (q qi ) cxi (q qi ) 2 d xi (q qi )3 (i 1, 2,..., N 1) (15а ) yi (q) ayi byi (q qi ) cyi (q qi )2 d yi (q qi )3 (i 1, 2,..., N 1) (15б ) где N - число точек участвующих в процессе переразбиения. Тогда используя непрерывность первых и вторых производных xi и yi , мы можем найти коэффициенты axi , bxi , cxi , d xi , a yi , byi , c yi , d yi . Более подробно метод нахождения коэффициентов описывается в [4]. На втором этапе длина дуги между i -ой и i 1 -ой точкой определяется как mi , а длина дуги от первой точки до i -ой определяется как hi . Поскольку аналитические приближённые значения xi (q) и yi (q) на каждом участке известны, мы можем вычислить mi mi hi 1 hi qi1 qi 2 2 x (q) y (q) dq(i 1,..., N 1) i i (16) где xi (q) bxi 2cxi (q qi ) 3d xi (q qi ) 2 , (17 а ) yi (q) bxi 2cxi (q qi ) 3d xi (q qi ) 2 . (17б ) Для вычисления интегралов используются квадратуры ЛежандраГаусса. b f ( x)dx 1 ba 2 a f( ba 2 x a 2 b )dx (18) 1 Где x x ( a b )/2 ( b a )/2 . Тогда интеграл на интервале [1,1] вычисляется по квадратурным формулам Гаусса: n 1 1 f ( x )dx C j f ( x j ) (19) j 1 В данной работе n=6. Следовательно, коэффициенты C j определяются следующим образом: и xj x1 x6 0.1713244924, C1 C6 0.9324695142 x2 x5 0.3607615731, C2 C5 0.6612093865 (20б ) x3 x4 0.4679139346, C3 C4 0.2386191861 (20в ) (20а) Таким образом заменяя qi на hi на первом шаге и формируем новые функции интерполяции от h , то есть xi (h) и yi (h) . Точно также мы можем сформулировать приближённые функции для потенциала скорости i (h) . На последнем шаге мы можем вычислить длину дуги от первого узла до любого нового узла на свободной поверхности. Подставляя длины дуг в приближённые функции на элементе, получим новые координаты узла xi и yi и значение потенциала i . Закон сохранения массы Контроль за консервативностью численного метода с помощью закона сохранения массы: N M 12 ydx xdy 14 (( yi yi 1 )( xi xi 1 ) ( xi xi 1 )( yi yi 1 )) i 1 C C (21) В настоящей работе для всех расчётов относительная погрешность массы не превышала 0.05%. Результаты Профили свободных поверхностей при различных числах Фруда показаны на рисунках 2, 3, 4. Рис. 2 Профиль свободной поверхности при t=0,0.1,…,0.5. Fr=0.5 Рис 3. Профиль свободной поверхности при t=0,0.1,…,0.5. Fr=1.0 Рис 4. Профиль свободной поверхности при t=0,0.1,…,0.5. Fr=2.0 Литература 1. Афанасьев К.Е., Стуколов С.В. КМГЭ для решения плоских задач гидро-динамики и его реализация на параллельных компьютерах // издво Кем-ГУ, Кемерово 2001, 208 с. 2. Longuet-Higgins MS, Cokelet ED (1976) The deformation of steep waves on water I. A numerical method of computation. Proc. R. Soc. Lond. A. 350, 1-26. 3. Maruo H, Song W (1994) Nonlinear analysis of bow wave breaking and deck wetness of a highspeed ship by the parabolic approximation. In: Proc. 20th Symposium on Naval Hydrodynamics, University of California, Santa Barbara, California. 4. Bhat RB, Chakraverty S (2004) Numerical analysis in Engineering. Pangbourne: Alpha Science International Ltd. 5. Афанасьев К.Е., Гудов А.М. Информационные технологии в численных расчётах: Учеб. Пособие. Кемерово: КемГУ, 2001, 204 с. 6. Афанасьев К.Е., Березин Е.Н. Анализ динамических характеристик при взаимодействии уединённой волны с припятствием // Вычисл. технологии. 2004. Т. 9, № 3. С. 108-123. 7. Sun H. Boundary Element Method Applied to Strongly Nonlinear WaveBody Interaction Problems [Электронный ресурс] / http://www.ntnu.divaportal.org/smash/get/diva2:123511/FULLTEXT01.pdf - 2007. 8. Zhao R, Faltinsen OM (1993) Water entry of two-dimensional bodies. J. Fluid Mech. 246, 593-612. 9. Wagner H (1932) Über Stoss- und Gleitvorgänge an der Oberfläche von Flüssigkeiten. Zeitschr. Angewandte Mathematik und Mechanik. 12(4), 193235.