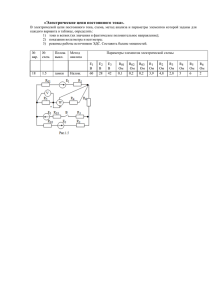
Модуль 4. Методы анализа нелинейных цепей
advertisement

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ Кафедра «Электроснабжение и электротехника» Томникова Л.Г., Пичугина А.А., Шлыков С.В. Пособие для студента по изучению дисциплины Электротехника - 2 часть Тольятти 2007 Содержание Введение ............................................................................................................................................................................3 Модуль 4. Методы анализа нелинейных цепей..............................................................................................................4 §4.1. График выполнения задания Модуля 4 ............................................................................................................4 §4.2. Теоретические вопросы Модуля 4 ....................................................................................................................4 §4.3. Задание Модуля 4 ...............................................................................................................................................5 §4.4. Схемы к Модулю 4.............................................................................................................................................6 § 4.5. Методические указания к компьютерному моделированию задания Модуля 4 .......................................10 §4.6. Методические указания к лабораторному исследованию задания Модуля 4.............................................10 §4.7. Краткая теория и примеры...............................................................................................................................13 §4.7.1. Анализ цепей постоянного тока с нелинейными резистивными элементами....................................13 §4.7.2. Магнитные цепи.......................................................................................................................................18 §4.7.3.Свойства ферромагнитных материалов ..................................................................................................19 §4.7.4.Основные законы магнитных цепей........................................................................................................20 §4.7.5.Неразветвленная магнитная цепь ............................................................................................................22 §4.7.6.Катушка индуктивности с магнитопроводом в цепи синусоидального напряжения .........................26 §4.7.7.Схема замещения и векторная диаграмма реальной катушки с магнитопроводом............................27 §4.8. Вопросы для самопроверки .............................................................................................................................31 §4.9. Примеры тестов ................................................................................................................................................32 §4.10. Задачи ..............................................................................................................................................................34 Модуль 5. Трансформаторы и электрические машины ...............................................................................................37 § 5.1. График выполнения задания Модуля 5 .........................................................................................................37 § 5.2. Теоретические вопросы Модуля 5 .................................................................................................................37 § 5.3. Задание модуля 5 .............................................................................................................................................38 § 5.4. Варианты данных к заданию Модуля 5.........................................................................................................39 § 5.5. Методические указания к лабораторному исследованию задания Модуля 5............................................40 § 5.6. Методические указания к компьютерному моделированию задания Модуля 5 .......................................43 § 5.7. Краткая теория и примеры..............................................................................................................................45 § 5.7.1. Трансформаторы .....................................................................................................................................45 § 5.7.2. Электрические машины..........................................................................................................................52 § 5.7.3. Электропривод ........................................................................................................................................70 § 5.8. Вопросы для самопроверки ............................................................................................................................70 § 5.9. Примеры тестов ...............................................................................................................................................71 § 5.10 Задачи ..............................................................................................................................................................73 Модуль 6. Анализ цепей при несинусоидальных периодических воздействиях. Переходные процессы. Электронные устройства ................................................................................................................................................75 § 6.1. График выполнения задания Модуля 6 .........................................................................................................75 § 6.2. Теоретические вопросы Модуля 6 .................................................................................................................75 § 6.3. Задание Модуля 6 ............................................................................................................................................76 § 6.4. Схемы к Модулю 6..........................................................................................................................................76 § 6.5. Методические указания к лабораторному исследованию задания Модуля 6............................................77 § 6.6. Методические указания к компьютерному моделированию задания Модуля 6 .......................................79 § 6.7. Краткая теория и примеры..............................................................................................................................80 § 6.7.1. Переходные процессы в электрических цепях.....................................................................................80 § 6.7.2. Периодические несинусоидальные сигналы ........................................................................................83 § 6.7.3. Электроника ............................................................................................................................................85 § 6.8. Вопросы для самопроверки ..........................................................................................................................100 § 6.9. Примеры тестов .............................................................................................................................................100 § 6.10 Задачи ............................................................................................................................................................103 Библиографический список .........................................................................................................................................105 2 Введение Дисциплина «Электротехника и электроника», согласно учебным планам, изучается студентами в течение двух семестров. Структура дисциплины. С целью преемственности методов обучения вторая часть курса представлена тремя модулями. Основой каждого модуля является задание. В первой части курса изучались законы и методы расчета электрических цепей при постоянных токах и напряжениях, символический метод расчета цепей синусоидального тока, явления резонанса, трехфазные цепи и методы их расчета, а также электрические измерения и измерительные приборы. Во второй части курса рассматриваются нелинейные электрические и магнитные цепи, приводятся методы их расчета - четвертый модуль. Пятый модуль посвящен анализу работы трансформаторов и электрических машин постоянного и синусоидального тока. Шестой модуль включает в себя вопросы электроники, переходных процессов в электрических цепях при синусоидальных и несинусоидальных периодических воздействиях. Задание каждого модуля содержит изучение теоретически вопросов, аналитический анализ, численное решение, виртуальное моделирование. В задание также вводится вопрос физического исследования эффекта, который изучается в данном модуле, при этом экспериментальное исследование необходимо для получения части исходных данных задания. Объем задания не жесткий, предполагает вариативность выполнения. Студент может дать одно общее решение задачи и привести результат физического эксперимента – это минимальная траектория с низкой оценкой. Если студент отвечает на все основные и частные вопросы модуля, проводит физические и виртуальные исследования – это максимальная траектория с высокой оценкой. Последовательность действий студента в рамках модуля: • посещение по расписанию обзорной лекции, получение задания и пособия по выполнению задания; знакомство с объемом знаний, который надо усвоить в рамках модуля; • получение учебников, задачников и методических указаний к лабораторным исследованиям и компьютерному моделированию (кафедра, библиотека), выполнение самостоятельной работы, согласно графику выполнения задания, подготовка к практическому занятию; • посещение по расписанию обзорного практического занятия, знакомство с перечнем методов выполнения задания и способов проверки результатов, получение пакета задач для самостоятельного решения; решение задач; • выполнение самостоятельной работы, согласно графику, подготовка к лабораторному исследованию; • выполнение по расписанию лабораторного исследования и получение по результатам исследования дополнительных исходных данных для выполнения задания; • самостоятельное выполнение задания, согласно графику, подготовка к компьютерному моделированию; • сравнительное виртуальное моделирование (проводится самостоятельно или в компьютерном классе по расписанию), анализ ошибок и исправление полученных результатов; • выполнение самостоятельной работы, согласно графику представление решенных задач и задания модуля преподавателю, получение допуска к тестированию; • тестирование знаний (кафедральный компьютерный класс или центр тестирования). Содержание дисциплины соответствует государственному образовательному стандарту высшего профессионального образования. 3 Модуль 4. Методы анализа нелинейных цепей §4.1. График выполнения задания Модуля 4 № недели Аудиторные занятия Самостоятельная работа 1 Лекция. Обзор материала 2 части дисциплины электротехника и электроника и теоретического материала Модуля 4. Изучение теоретического материала, вопросы 1 – 4. Выполнение 1 пункта задания Изучение теоретического материала, вопросы 5 – 6. Выполнение 2 пункта задания. Подготовка к компьютерному моделированию. Изучение теоретического материала, вопросы 7 – 11. Выполнение пунктов 3 – 5 задания. Подготовка к физическому эксперименту 2 Практическое занятие. Выдача задания, решение задач по темам модуля. 3 Компьютерное моделирование. Анализ и проверка выполненных пунктов задания. 4 Физический эксперимент. Экспериментальное определение исходных данных для выполнения следующих пунктов задания. Изучение теоретического материала, вопрос 12 – 15. Выполнение 6 пункта задания. 5 Аудиторная консультация. Численный анализ задания. Изучение теоретического материала, вопрос 16 – 18. Выполнение пункта 7 – 8 задания. 6 Прием задания, допуск к тестированию. Сдача задания, тестирование. Подготовка к тестированию. §4.2. Теоретические вопросы Модуля 4 1. 2. 3. 4. 5. Определение нелинейной электрической цепи. [1], [2]. Нелинейные электрические цепи постоянного тока. [1], [2]. Вольт-амперные характеристики нелинейных сопротивлений. [1], [2]. Статическое и дифференциальное сопротивление. [1], [2]. Графический метод анализа нелинейных электрических цепей при последовательном, параллельном и смешанном соединении элементов. [1], [2]. 6. Анализ последовательной электрической цепи, содержащей нелинейный и линейный резисторы, графическим методом нагрузочной характеристики. [1], [2]. 7. Понятие магнитной цепи, элементы магнитной цепи. [1], [2]. 8. Свойства ферромагнитных материалов. [1], [2]. 9. Основные величины, характеризующие магнитное поле. [1], [2]. 10. Закон полного тока для магнитной цепи с постоянной магнитодвижущей силы. [1], [2]. 11. Расчет неразветвленной магнитной цепи. [1], [2]. 4 12. Магнитное сопротивление. Аналогия между электрическими и магнитными цепями постоянного тока. [1], [2]. 13. Законы Ома и Кирхгофа для магнитной цепи. [1], [2]. 14. Переменный магнитный поток в катушке с магнитопроводом. [1], [2]. 15. Влияние магнитопровода катушки на форму тока в нелинейной катушке. [1], [2]. 16. Идеализированная катушка с ферромагнитным сердечником. [1], [2]. 17. Природа потерь в реальной катушке с магнитопроводом. [1], [2]. 18. Схемы замещения и векторные диаграммы реальной катушки с ферромагнитным сердечником. [1], [2]. §4.3. Задание Модуля 4 Цель задания: изучение физических процессов в нелинейных электрических и магнитных цепях. Исходные данные: каждому студенту преподаватель выдает вариант задания, номер которого обозначается числом из трех цифр. На установочном практическом занятии согласовать пакет задач для самостоятельного решения. Первая цифра варианта указывает – номер строки в таблице 4.1, в которой приводятся заданные параметры нелинейной электрической цепи и параметры, которые необходимо определить. Вторая цифра соответствует номеру столбца в таблице 4.2, где указаны значения электрических величин. Третья цифра соответствует типу полупроводникового диода: 1 – RGL34A; 2 – LD106. Вольтамперные характеристики (ВАХ) диода представлены на рис. 4.2 и рис. 4.3. Содержание и порядок выполнения задания: 1. Получить вариант задания на обзорной лекции. 2. На установочном практическом занятии согласовать пакет задач для самостоятельного решения. 3. По двум заданным параметрам нелинейной электрической цепи, методом пересечения характеристик, построить нагрузочную прямую, определить координаты рабочей точки и неизвестные величины согласно варианту. 4. Методом компьютерного моделирования проверить правильность графического расчета нелинейной электрической цепи постоянного тока. Примечание: см. Методические указания к компьютерному моделированию. 5. К источнику синусоидального напряжения частотой f = 50 Гц подключена катушка индуктивности с магнитопроводом, число витков и сопротивление обмотки определяются второй цифрой варианта в строке таблицы 4.3. Изобразить схему замещения нелинейной катушки индуктивности. 6. С помощью физического эксперимента в лаборатории кафедры (см. Методические указания к выполнению лабораторного исследования); а) исследовать влияние катушки с магнитопроводом, как нелинейного элемента на форму кривой тока в цепи синусоидального напряжения; б) снять вольт-амперную характеристику нелинейной катушки при заданных, согласно варианту, зазорах и построить их на одном графике; в) по экспериментальным данным построить зависимость тока от воздушного зазора 5 магнитопровода I (δ ) при напряжении, заданном согласно варианту; г) по графику I (δ ) определить значение номинального тока I ном при воздушном зазоре δ = δ 3 , согласно варианту задания. 7. Используя найденной в результате физического исследования значение тока I ном рассчитать параметры схемы замещения реальной катушки со стальным сердечником. 8. Построить векторную диаграмму для схемы замещения реальной нелинейной катушки индуктивности. §4.4. Схемы к Модулю 4 Схема 1 UR Схема 2 R J E I UД VD U IR IД R VD I Рис. 4.1. Схема к лабораторному исследованию Таблица 4.1 № строки 1 2 3 4 5 6 7 8 Заданные электрические величины E,R UR , R R , UД R,I J,R R,U R , IД R , IR № схемы по рис.4.1. Определить UR , UД , I UД , I , E UR , E , I E , UД , UR IR , IД , U J , IД , IR J , IR , U J , U , IД схема 1 схема 2 Таблица 4.2 схема 2 схема 1 № столбца E,B R , Ом UД , B UR , B I ,A J,A R , Oм IД , A 1 2 3 4 5 6 7 8 9 3 0,6 1,6 0,8 1,6 3,2 0,7 0,5 1,5 0,5 1,2 0,6 2,2 2 1 1,5 3,5 0,7 1,4 1,8 0,5 2,4 0,5 0,9 2 0,8 1,3 1,2 2,6 3,8 0,9 1,4 3,5 1 1,7 1,6 0,8 3 0,8 1,6 2,5 0,5 1,1 1,4 3 2,2 0,6 1,2 4 0,8 1,5 2 1,2 4 1 0,8 1,5 1 1,8 0,4 2,4 2,6 0,7 2 3 0,9 1,4 1 1,4 3,6 0,5 1,8 6 IR , A U,B 2,1 1 1,9 1,3 1,2 0,9 2,5 1,4 2,4 1,1 1,7 1,3 2 1,5 1,4 1,2 2,6 1,4 Таблица 4.3 № 1 2 3 4 5 6 7 8 w Rобм δ1 δ2 δ3 U мм 0,5 0,5 0,5 1 1 0,5 1 1 мм 3 1,5 2 2,5 2 2,5 3 1,5 мм 2 1 1,5 2 1,4 1,8 2,2 0,9 В 400 400 410 400 400 400 400 400 Ом 2,5 1,2 2,6 2,5 2,2 2,5 2,4 2,1 7 Рис. 4.2. ВАХ полупроводникового диода RGL34A 8 Рис. 4.3. ВАХ полупроводникового диода LD106 9 § 4.5. Методические указания к компьютерному моделированию задания Модуля 4 Содержание компьютерного эксперимента: Моделирование является проверкой произведенных расчетов нелинейных электрических цепей графическим методом. Исследуемая схема содержит источник постоянной ЭДС или тока, линейный элемент – резистор и нелинейный – полупроводниковый диод и набор измерительных приборов. Следует помнить, что вольтметр включают параллельно исследуемому объекту, а амперметр – последовательно. Выбор типа источника определяется из условия схемы: источник постоянной ЭДС – для схемы с последовательным соединением, а источник постоянного тока – для схемы с параллельным соединением элементов. Схема соединения элементов указана в задании на расчет и изображена на рис.4.1 Выполнение компьютерного моделирования: 1. Необходимо вынести элементы электрической цепи из библиотек: • библиотека Sources – источник ЭДС • библиотека Basic – резистор • библиотека Diodes – реальный диод или RGL34A); или тока ; , сопротивление которого необходимо задать; , тип которого выбирается из плей-листа(LD106 библиотека Indicators – измерительные приборы: вольтметры , амперметры . 2. Собрать виртуальную электрическую схему с нелинейным элементом согласно заданию, с подключенными измерительными приборами. 3. Выставить величину источника постоянного ЭДС или тока, известную из задания на расчёт или полученную в результате расчета графическим методом. • из библиотеки Sources и заземлить любую точку 4. Вынести компонент «заземление» схемы. 5. Активизировать схему с помощью ключа в верхнем правом углу. Зафиксировать схему в программе Multisim, с полученными данными. 6. Сравнить результаты моделирования с данными расчёта пункта 3 задания модуля. §4.6. Методические указания к лабораторному исследованию задания Модуля 4 Цель исследования: изучение влияния напряжения и воздушного зазора магнитопровода на ток и параметры катушки индуктивности с магнитопроводом; получение дополнительных исходных данных для выполнения задания. Подготовка к экспериментальному исследованию: 1. Изучить теоретические вопросы: • Элементы магнитной цепи. 10 Свойства ферромагнитных материалов. • Основные величины, характеризующие магнитное поле. • Переменный магнитной поток в катушке с магнитопроводом. • Влияние магнитопровода на форму кривой тока в катушке с магнитопроводом, включенной в цепь синусоидального напряжения. • Идеализированная катушки с ферромагнитным сердечником. • Схема замещения и векторные диаграммы реальной катушки с магнитопроводом. 2. Подготовить бланк протокола лабораторного исследования. Он должен содержать: • схему электрической цепи рис.4.4, • таблицу 4.4, • формулы для расчета параметров схемы замещения катушки с магнитопроводом. • Таблица 4.4 δ1 = δ = 0 , мм Вычислено Измерено № п/п δ2 = , мм Измерено Вычислено , мм Вычислено Измерено I U P z I U P z I U P z А В Вт Ом А В Вт Ом А В Вт Ом 1 2 3 4 5 6 7 8 9 10 Описание лабораторной установки Исследуемая катушка индуктивности L и резистор R подключаются к входным зажимам лабораторного автотрансформатора T, входные зажимы которого подключены к источнику синусоидального напряжения. Напряжение на резисторе R повторяет форму тока в цепи, поэтому для исследования формы тока осциллограф PS подключается к его зажимам. Измерение тока, напряжения и активной мощности в различных режимах проводиться с помощью комплекта К-505. 11 нагрузка ~ 220 B ~ 220 B Рис. 4.4. Схема экспериментальной установки Содержание лабораторного исследования: 1. Провести экспериментальное исследование катушки с ферромагнитным сердечником с регулируемым воздушным зазором при питании от источника синусоидального напряжения. 2. По экспериментальным данным построить ВАХ и зависимости тока от воздушного зазора магнитопровода при заданном согласно варианту напряжении: I (δ ) при U = const . 3. Для расчета параметров схемы замещения нелинейной катушки по характеристике I (δ ) определить величину тока при заданном, согласно варианту, значении воздушного зазора δ 3 . Выполнение лабораторного исследования: 1. Познакомиться с оборудованием и измерительными приборами, используемыми для проведения эксперимента. 2. Собрать на испытательном стенде электрическую цепь (см. рис.4.4). Движок автотрансформатора T должен стоять на нуле. 3. Установить воздушный зазор в исследуемой катушке δ = 0 . Изменяя напряжение с помощью автотрансформатора, устанавливать значение тока I от 0 до 5 А через 0,5 А и измерять соответствующие значения напряжения и активной мощности P. Полученные значения занести в таблицу 4.4. 4. Зарисовать с экрана осциллографа кривую, соответствующую форме тока в цепи катушки при токе I = 4 А. 5. Устанавливая зазоры δ = δ1 и δ = δ 2 повторить п. 3 и п. 4. 6. Построить на одном графике три ВАХ катушки при различных воздушных зазорах в сердечнике. 7. Рассчитать зависимости z (I ) при различных воздушных зазорах, полученные значения занести в таблицу 4.4. Построить зависимости z (I ) на одном графике. 8. Построить зависимость тока через катушку от величины зазора в сердечнике I (δ ) при U = const (величина напряжения задается вариантом). 9. По характеристике I (δ ) определить значение тока при зазоре δ = δ 3 величина которого задана вариантом. 12 §4.7. Краткая теория и примеры §4.7.1. Анализ цепей постоянного тока с нелинейными резистивными элементами Нелинейными электрическими элементами являются элементы, параметры которых зависят от тока и напряжения. Цепи, содержащие такие элементы, именуемые электрическими нелинейными цепями, обладают рядом новых свойств, которые отсутствуют у линейных цепей. Эти свойства позволяют создать основанные на них автоматические системы управления и регулирования, устройства для преобразования электромагнитной энергии, устройства для производства электрических измерений и передачи информации, быстродействующие вычислительные машины и т.д. Особенностью и сложностью анализа нелинейных систем является невозможность применения принципа наложения. К нелинейным электрическим цепям постоянного тока относятся электрические цепи, содержащие нелинейные сопротивления, обладающие нелинейными вольт-амперными характеристиками, т.е. зависимость напряжения на зажимах резистивного нелинейного элемента от тока в нем задается его вольтамперной характеристикой (ВАХ). Вольт-амперные характеристики могут быть заданы в виде графиков, таблиц и аналитических выражений. Статическими называют характеристики, в которых каждая точка дает значение постоянного напряжения при соответствующем значении постоянного тока. Из них определяют статическое сопротивление и статическую проводимость нелинейного элемента u Rñò = = f (i ) . i Электрическое состояние нелинейных цепей постоянного тока описывается системой алгебраических уравнений, составленных по первому и второму закону Кирхгофа. Общих аналитических методов решения нелинейных уравнений не существует, поэтому решение таких задач осуществляется численными методами с использованием ЭВМ. Однако существуют наиболее простые методы расчета цепей постоянного тока с резистивными элементами графические и графоаналитические: метод эквивалентных преобразований и метод пересечения характеристик. Метод эквивалентных преобразований для нелинейных цепей, так же как и для линейных, основан на замене нескольких элементов одним и сводится к нахождению ВАХ эквивалентного нелинейного элемента. При расчете электрических цепей с последовательным или параллельным включением нелинейных (или линейных и нелинейных) сопротивлений их вольт-амперные характеристики представляются в общей координатной системе и по ним строится общая вольт-амперная характеристика всей нелинейной электрической цепи. а) При последовательном соединении нелинейных резистивных элементов, графически заданных своими вольт-амперными характеристиками, по оси абсцисс которых откладываются напряжения, а по оси ординат – ток, складываются абсциссы этих кривых для различных значений тока. Абсцисса каждой точки эквивалентного элемента при заданном токе находится как сумма соответствующих падений напряжения на сопротивлениях, поскольку при последовательном соединении по сопротивлениям протекает один и тот же ток цепи (рис.4.5.). 13 I(U1) I I I(U2) R2 U2 R1 U1 E I I(U1+U2) U U2 U1 E Рис.4.5. К расчету электрической цепи с последовательным соединением нелинейных элементов. Таким образом, по общей вольт-амперной характеристике I (U1 + U 2 ) нелинейной цепи при заданном значении напряжения ЭДС легко определяют ток в нелинейной цепи I, а по заданному току, находят напряжение на каждом из последовательно соединенных сопротивлений, переходя к их вольт-амперным характеристикам. б) При параллельном соединении нелинейных резистивных элементов складываются ординаты ВАХ для различных значений напряжения. Ордината каждой точки вольт-амперной характеристики эквивалентного нелинейного сопротивления при заданном напряжении определяют как сумму токов в ветвях соответствующего сопротивления I1 (U ) + I 2 (U ) , так как при параллельном соединении на всех сопротивлениях действует одно и то же напряжение (рис.4.6). I I1(U)+I2(U) I1(U) I1 J J U I2 I2 R1 R2 I2(U) I1 U U Рис.4.6. К расчету электрической цепи с параллельным соединением нелинейных элементов. Следовательно, при параллельном включении сопротивлений, по общей ВАХ и заданном токе источника тока, нетрудно определить падение напряжения на параллельном участке цепи, а по известному напряжению, переходя к ВАХ каждого элемента, найти ток в каждом сопротивлении. Применение графического метода расчёта цепей со смешанным соединением нелинейных резистивных элементов основано на методе свёртывания. Для получения характеристики всей цепи при смешанном соединении нелинейных элементов используются те же приемы, осуществляемые поочередно. 14 В методе пересечения характеристик реализуется графическое решение уравнения, определяющего электрическое состояние цепи при заданной величине источника. а) При последовательном соединении линейного элемента и нелинейного резистивного элемента, графически заданного своей вольт-амперной характеристикой, решение задачи сводится к решению уравнения, составленного по второму закону Кирхгофа, и будет определяться точкой пересечения нагрузочной прямой с ВАХ нелинейного элемента. Для построения нагрузочной прямой, достаточно определить координаты двух точек, из опыта холостого хода и короткого замыкания. Напряжение холостого хода определяется по методу эквивалентного генератора. Точка пересечения линейной и нелинейной ВАХ получила название рабочей точки (рис.4.7.). По второму закону Кирхгофа: E = I ⋅ R + UД , При I = 0 , U ab = E ; E . R Таким образом, из графика находятся ток в цепи и напряжение на нелинейном элементе, что представляют собой координаты точки пересечения. IД при U Д = 0 , I = I E I R UR Е R E R I VD Uab UД UД E UД UR Рис. 4.7 К расчету электрических цепей с последовательным включением нелинейного и линейного элементов методом пересечений. б) При параллельном соединении линейного и нелинейного резистивного элемента, графически заданного своей вольт-амперной характеристикой, решение задачи сводится к решению уравнения, составленного по первому закону Кирхгофа, и будет определяться точкой пересечения нагрузочной прямой. По первому закону Кирхгофа: U J = I = ab + I Д . R При I Д = 0 , U ab = I ⋅ R ; При U ab = 0 , I Д = I . Координаты точки пересечения двух ВАХ линейной и нелинейной являются найденным решением задачи. Они определяют ток в нелинейном элементе и напряжение на нелинейном и линейном сопротивлении (рис.4.8.). 15 Рис. 4.8 К расчету электрических цепей с параллельным включением нелинейного и линейного элементов методом пересечений. П р и м е р . Нелинейные сопротивления R1 и R2, включенные последовательно в электрическую цепь постоянного тока (рис.4.9 а), имеют вольт-амперные характеристики I и II, приведенные на рис.4.9, б. Определить ток I в цепи и напряжения U1 и U2 на этих сопротивлениях, если приложенное к цепи напряжение U = 60 В. В каких пределах измениться напряжение ΔU цепи при изменении тока I от I1 = 25 мА до I2 = 175 мА. Решение. Строят общую вольт-амперную характеристику III указанных двух последовательно соединенных нелинейных элементов (рис.4.9, б) исходя из условия, что подводимое к цепи напряжение U при данном токе I нагрузки равно сумме напряжений на сопротивлениях R1 и R2, т.е. U=U1+U2. I + R1 R2 U1 U2 U а) - I, мА 300 IV 200 I2 5 4 100 8 I1 0 20 9 I II III 3 2 6 1 40 60 + U I R1 R2 I1 80 U, B I2 в) б) Рис.4.9. К расчету электрических цепей с включением нелинейных элементов Ток в цепи при напряжении U = 60 В согласно зависимости III определяется ординатой 0 – 5, соответствующей I2 = 175 мА. Напряжение на участках цепи находят из графических зависимостей. При токе I2 = 175 мА, U1 = 19 В (абсцисса 5-4), U2 = 41 В (абсцисса 5-3). При токе I1 = 25 мА напряжение, подводимое к цепи, U = 22 В. Следовательно, изменение подводимого к цепи напряжения при изменении тока в заданных пределах согласно рис. 4.9, б составляет: ΔU = 66 – 22 = 38 В. П р и м е р . В электрическую цепь постоянного тока (рис.4.9, в) при напряжении U = 30 В включены параллельно нелинейные сопротивления R1 и R2, вольт-амперные характеристики I и II которых представлены на рис.4.9, б. Определить общий ток I в цепи, токи I1 и I2 в ветвях. Решение. Общая вольт-амперная характеристика IV (рис.4.9, б) при параллельном соединении нелинейных сопротивлений построена сложением токов (ординат) зависимостей I и II при соответствующем напряжении. Ток нелинейного сопротивления R1 (рис.4.9, а) при заданном напряжении U = 30 В, равен, ординате 6 – 8, I2 = 100 мА. Общий ток в неразветвленной части цепи равен ординате 6 – 9, т.е. I = I1 + I2 = 205 + 100 = 305 мА. П р и м е р . В электрическую цепь постоянного тока (рис.4.10, а) включено нелинейное сопротивление R5. Определить ток I5 в нелинейном сопротивлении и напряжение U12, действующее между точками 1 и 2 цепи. Вольт-амперная характеристика нелинейного 16 сопротивления R5 (кривая 3) приведена на рис.4.10 б). ЭДС источника питания E = 90 В, сопротивление резисторов: R1 = 15 Ом; R2 = 45 Ом; R3 = 43 Ом; R4 = 45 Ом. 1 U, B R1 I5 Еэк 40 1 3 I1 30 R3 B U12 R5 1 Е I 20 3 R5 Rэк 10 2 R2 I2 R4 0 2 0,5 1 1,5 I,А 2 в) б) а) Рис.4.10. Расчет нелинейной цепи методом пересечения характеристик Решение. Используя метод эквивалентного генератора, определяем напряжение U12, действующее между точками 1 и 2 электрической цепи в режиме холостого хода при отключенном нелинейном сопротивлении R5 (рис.4.10, а). Ток в ветви резистора R1 при отключенном нелинейном сопротивлении R5 (ключ В выключен): E 90 I1 = = = 1,5 А R1 + R2 15 + 45 Ток в ветви резистора R2 при отключенном нелинейном сопротивлении R5: E 90 I2 = = =1 A. R2 + R4 45 + 45 ЭДС эквивалентного генератора Eэк определяют при отключенном нелинейном сопротивлении R5. По второму закону Кирхгофа из уравнения электрического равновесия, составленного для внешнего замкнутого контура электрической цепи (рис.4.10, а): U xx = R2 ⋅ I 2 − R1 ⋅ I1 = 0 или U xx = 45 ⋅1 − 15 ⋅1,5 = 22,5 B , откуда E эк = U xx = 22,5 B . Внутреннее сопротивление Rэк эквивалентного генератора относительно точек 1 и 2 электрической цепи рис.4.10 а), при закороченном источнике ЭДС: RR RR 15 ⋅ 45 45 ⋅ 45 Rэк = 1 3 + 2 4 = + = 33,75 Ом . R1 + R3 R2 + R4 15 + 45 45 + 45 В соответствии со схемой замещения рассматриваемой нелинейной электрической цепи (рис.4.10, в) исходя из уравнения, составленного по второму закону Кирхгофа, имеем: E − U 12 U12 + Rýê ⋅ I 5 = Eýê , отсюда I 5 = эк . R эк Полученное уравнение представляет аналитическое выражение зависимости I5(U12). Поскольку Eэк = const и Rэк = const , последнее уравнение является уравнением прямой в системе координат I5 и U12 (рис.4.10, б). Ee координаты определяются в режиме холостого хода – точка 1 (при I5=0; Ux=Eэк =22,5 В) и в режиме короткого замыкания - точка 2 (Uк = 0, ток E 22,5 I 5 = эк = = 0,666 А. R эк 33,75 Ток I5 в цепи нелинейного сопротивления R5 и напряжение U12 на его зажимах определяют графическим способом как координаты точек пересечения вольт-амперной характеристики нелинейного элемента R5 (рис.4.10, б) с полученной прямолинейной зависимостью I5(U12). При этом I5 = 0,45 A, U12 = 6,75 B. П р и м е р . Для точки A вольт-амперной характеристики I(U) нелинейного элемента (рис.4.11) определить статическое Rст и дифференциальное Rд сопротивления. 17 I, мА 6 4 2 α 0 А β В С 20 30 40 U, В Рис.4.11. Вольтамперная характеристика. Решение. Статическое сопротивление, соответствующее точке А вольт-амперной U OC 35 = = 7 ⋅ 10 3 = 7 кОм. Статическое сопротивление характеристики: Rст = = −3 I AC 5 ⋅ 10 пропорционально тангенсу угла α, т.е. Rст = tg (α ) ⋅ mr , где mr - масштаб сопротивлений. Дифференциальное сопротивление, соответствующее вольт-амперной 35 OC = = 20 ⋅ 103 = 20 кОм. Дифференциальное характеристики: Rд = mr ⋅ tgβ = AB 1,75 ⋅ 10 −3 сопротивление пропорционально тангенсу угла β. §4.7.2. Магнитные цепи Магнитная цепь – часть электротехнического устройства, предназначенного для создания в определенном месте пространства магнитного поля требуемой интенсивности и направленности. Магнитные цепи составляют основу практически всех электротехнических устройств и многих измерительных приборов. В составе магнитной цепи имеются элементы, возбуждающие магнитное поле (одна или несколько намагничивающих обмоток или постоянные магниты) и магнитопровод (сердечник), выполненный в основном из ферромагнитных материалов. Использование ферромагнетиков обусловлено их способностью многократно усиливать внешнее магнитное поле, создаваемое намагничивающими обмотками или постоянными магнитами. Ферромагнетики отличает высокая магнитная проницаемость по сравнению с окружающей средой, что дает возможность концентрировать и направлять магнитные поля. Магнитными цепями с постоянной магнитодвижущей силой (МДС) называются цепи, в которых магнитное поле возбуждается постоянными токами намагничивающих обмоток или постоянными магнитами. При анализе и расчете магнитных цепей пользуются следующими величинами, характеризующими магнитное поле, приведенными в таблице 4.5. Векторные величины, характеризующие магнитное поле Таблица 4.5 Наименование Обозначение Единицы измерения Вектор магнитной индукции B Тл (Тесла) Вектор намагниченности J А/м 18 Определение Векторная величина, характеризующая интенсивность и направленность магнитного поля в данной точке пространства. Магнитный момент единицы объема вещества. Вектор напряженности магнитного поля Н= А/м H 1 μa ⋅B−J = 1 μμ 0 ⋅B, где μ 0 = 4π ⋅ 10 −7 Гн/м – магнитная постоянная. Основные скалярные величины, используемые при расчете магнитных цепей приведены в таблице 4.6. Основные скалярные величины, характеризующие магнитную цепь Таблица 4.6. Наименование Магнитный поток Обозначение Ф Единицы измерения Вб (Вебер) Определение Поток вектора магнитной индукции через поперечное сечение S магнитопровода Ф = ∫ В ⋅dS . S Магнитодвижущая сила (МДС) А F F = I ⋅ w, где I - ток в обмотке, w - число витков обмотки. b UM = ∫ H ⋅ dl , a Магнитное напряжение UM А где a и b - граничные точки участка магнитной цепи, для которого определяется U M . §4.7.3.Свойства ферромагнитных материалов При решение электротехнических задач все вещества в магнитном отношении делятся на две группы: ферромагнитные (относительная магнитная проницаемость μ >> 1 ); неферромагнитные (относительная магнитная проницаемость μ ≈ 1 ). К ферромагнитным веществам относятся четыре химических элемента: железо, кобальт, никель гадолиний, а также большое число различных сплавов и химических соединений. Отличительное свойство ферромагнетиков – очень большая магнитная проницаемость μ . Кроме того, ферромагнетики обладают уникальной способностью сохранять намагниченное состояние и после того, как намагничивающее поле выключено. Поэтому из ферромагнитных веществ можно изготавливать постоянные магниты. Свойства ферромагнитных материалов принято характеризовать зависимостью магнитной индукции B от напряженности магнитного поля H . Различают два основных типа этих зависимостей: кривые намагничивания и гистерезисные петли. Кривые намагничивания – это однозначные зависимости между B и H . При периодическом изменения напряженности магнитного поля зависимость между B и H приобретает петлевой характер (рис.4.12). 19 B B max Br -Hc Hc 0 H -B r Рис.4.12. Статическая петля гистерезиса. Если начальное магнитное состояние материала сердечника характеризуется значениями H = 0 , B = 0 , то при плавном нарастании тока в обмотке получим нелинейную зависимость B(H ) , которая называется кривой первоначального намагничивания (рис.4.12 штриховая линия). Начиная с некоторых значений напряженности H магнитного поля индукция B в магнитопроводе практически перестает увеличиваться и остается равной Bmax . Эта область зависимости B(H ) называется областью технического насыщения. Если, достигнув насыщения, начать плавно уменьшать постоянный ток в обмотке, т.е. уменьшать напряженность поля, то индукция также начнет уменьшаться. Однако зависимость B(H ) уже не совпадет с кривой первоначального намагничивания (рис.4.12). При значительных отрицательных значениях напряженности магнитного поля снова наступит техническое насыщение ферромагнитного материала. Если теперь увеличивать ток прямого направления до насыщения, то будет получена замкнутая кривая B(H ) , которая называется предельной статической петлей гистерезиса ферромагнитного материала. Предельный статический цикл гистерезиса ферромагнитных материалов характеризуется следующими параметрами: H c - коэрцитивной силой, B r - остаточной индукцией (рис.4.12). По значению параметра H c предельного статического цикла гистерезиса ферромагнитные материалы делятся на две группы: магнитные материалы с малыми значениями коэрцитивной силы H C < 0,05 ÷ 0,01 А/м называются магнито-мягкими; магнитные материалы с большими значениями коэрцитивной силы H C > 20 ÷ 30 кА/м называются магнито-твердыми. На циклическое перемагничивание магнитопровода затрачивается мощность, выделяемая в нем в виде теплоты, которая называется мощностью потерь в магнитопроводе. Потери мощности в магнитопроводе (в стали) PСТ включает в себя потери на гистерезис PГ и потери от вихревых токов PВ , наводимых переменным магнитным потоком в металле магнитопродвода PÑÒ = PÃ + PÂ . §4.7.4.Основные законы магнитных цепей В основе расчета магнитных цепей лежат два закона (см. табл.4.7.). 20 Основные законы магнитной цепи Таблица 4.7. Наименование закона Аналитическое выражение закона Формулировка закона Закон (принцип) непрерывности магнитного потока ∫ B⋅dS = 0 Поток вектора магнитной индукции через замкнутую поверхность равен нулю. ∫ H ⋅ dl = ∑ I Циркуляция вектора напряженности вдоль произвольного контура равна алгебраической сумме токов, охватываемых этим контуром. Закон полного тока S l При анализе магнитных цепей и, в первую очередь, при их синтезе обычно используют следующие допущения: - магнитная напряженность, соответственно магнитная индукция, во всех точках Ф поперечного сечения магнитопровода одинакова ( B = ); S - потоки рассеяния отсутствуют (магнитный поток через любое сечение неразветвленной части магнитопровода одинаков); - сечение воздушного зазора равно сечению прилегающих участков магнитопровода. Это позволяет использовать при расчетах выражения законов Кирхгофа и Ома для магнитных цепей (см. табл. 4.8), вытекающие из законов, сформулированных в таблице 4.7. Законы Кирхгофа и Ома для магнитных цепей Таблица 4.8. Наименование Аналитическое выражение Формулировка закона закона закона Алгебраическая сумма магнитных Первый закон Ф = 0 потоков в узле магнитопровода равна ∑ Кирхгофа нулю. Алгебраическая сумма падения магнитного напряжения вдоль замкнутого Второй закон F = ∑U M = ∑ H ⋅ l ∑ контура равна алгебраической сумме Кирхгофа МДС, действующих в контуре. Падение магнитного напряжения на U M = Ф ⋅ RM , участке магнитопровода длинной l равно Закон Ома 1 произведению магнитного потока и где R M = μμ 0 S магнитного сопротивления R M участка. Сформулированные законы и понятия магнитных цепей позволяют провести формальную аналогию между основными величинами и законами, соответствующими электрическим и магнитным цепям, которую иллюстрирует табл. 4.9. Аналогия величин и законов для электрических и магнитных цепей Таблица 4.9. Электрическая цепь Магнитная цепь I , А – ток Ф , Вб – поток E , В – ЭДС F , А – МДС R M , Гн −1 – магнитное сопротивление R , Ом – электрическое сопротивление 21 U , В – электрическое напряжение U M , А – магнитное напряжение ∑ I = 0 – первый закон Кирхгофа ∑ U = ∑ E – второй закон Кирхгофа ∑ Ф = 0 – первый закон Кирхгофа ∑ U = ∑ F – второй закон Кирхгофа U = IR – закон Ома U M = Ф ⋅ R M – закон Ома M §4.7.5.Неразветвленная магнитная цепь Магнитные цепи можно разделить на неразветвленные и разветвленные. В неразветвленных магнитных цепях магнитный поток в любом сечение одинаков. В разветвленных – магнитные потоки в различных сечениях различны. В общем случае магнитные цепи имеют сложную конфигурацию. Например, в электродвигателях, генераторах. Магнитные цепи в большинстве нелинейны. Задачей расчета неразветвленных магнитных цепей является в большинстве случаев определение МДС, необходимой для получения заданного значения магнитного потока в некотором участке магнитопровода. При этом должны быть известны конфигурация и геометрические размеры магнитной цепи и магнитные свойства ферромагнитного материала (кривая намагничивания). Такая задача называется прямой. Расчет неразветвленной магнитной цепи по заданному потоку Рассмотрим последовательность расчета магнитной цепи изображенной на рисунке 4.13. I l1 S1 δ S2 l2 Рис.4.13. Неоднородная магнитная цепь. Дано: геометрические размеры магнитной цепи в мм; магнитный поток Ф или индукция B в каком-либо сечение; кривая намагничивания H ( B) . Определить: МДС F . Задачу решаем, применив закон полного тока ∑H 22 l = Iw . K K 1. Разбиваем магнитную цепь на участки постоянного сечения и определяем длинны l K (м) участков и площади их поперечного сечения S K (м2). Длины участков берем по средней силовой линии. Величина воздушного зазора равна 2δ (м). l1 , l 2 , 2δ , S1 , S 2 2. Исходя из постоянства магнитного потока Ф ( δ << l1 ), пренебрегая потоком рассеяния, по заданному потоку находим магнитную индукцию B (Тл) на участках: Ф Ф Ф B1 = , B2 = , Bδ = ( S δ = S1 ) (1) S1 S2 S1 3. По кривой намагничивания определяем напряженность магнитного поля H (А/м) в магнитопроводе: H1 , H 2 . Магнитная проницаемость воздуха μ 0 = 4π ⋅ 10 −7 Гн/м и напряженность магнитного поля в зазоре рассчитывается по формуле B H δ = δ = 0,8 ⋅ 10 6 ⋅ Bδ (2) μ0 4. Подсчитываем сумму падений магнитного напряжения и определяем МДС: H 1l1 + H 2 l 2 + H δ ⋅ 2δ = Iw (3) Между расчетами нелинейных магнитных цепей с постоянными МДС и расчетом нелинейных электрических цепей постоянного тока нетрудно установить аналогию. Если в уравнении (3) заменить значение напряженности магнитного поля значениями индукции, получим: B B1 B l1 + 2 l 2 + δ ⋅ 2δ = Iw , μμ 0 μμ 0 μ0 с учетом (1): Ф( l1 μμ 0 S1 + l2 μμ 0 S 2 + 2δ ) = Iw , μ 0 S1 lK = R Mk - магнитное сопротивление к-го участка магнитопровода. Оно нелинейно, μμ 0 S K т.к. зависимость B( H ) нелинейна. где С учетом этого рассматриваемой магнитной цепи соответствует эквивалентная схема замещения (рис.4.14), для анализа которой можно пользоваться всеми методами анализа электрических цепей с нелинейными сопротивлениями. Ф F R М1 RМδ R М2 Рис.4.14. Эквивалентная схема замещения. Обратная задача. Считая известной МДС F , определим магнитный поток Ф. 23 H·l1 B Ф F=Iw H Hδ·2δ H·l2 a) б) Рис.4.15. Алгоритм решения обратной задачи. Произвольно задаемся магнитным потоком Ф и определяем магнитную индукцию В Ф B= , S далее по заданной кривой намагничивания (рис.4.15, а) определяем напряженность Н. При заданном значении Ф определяем F по второму закону Кирхгофа (рис.4.15, б). F = Hl1 + 2 H δ δ + Hl2 . Производим аналогичный расчет для нескольких точек. Строим зависимость Ф = f(F). Истинное значение Ф определяем по точке пересечения полученной кривой и заданной м.д.с. F (рис.4.16). Ф Ф F F Рис.4.16. Зависимость магнитного потока от намагничивающей силы. П р и м е р В неразветвленной магнитной цепи с длинной средней линии 0,4 м и воздушным зазором δ = 2 мм необходимо создать магнитную индукцию B = 1 Тл. Магнитопровод выполнен из электротехнической стали 1512. Определить напряженность поля в магнитопроводе и воздушном зазоре, ток намагничивающей обмотки с числом витков w = 300 . Решение. Напряженность магнитного поля в воздушном зазоре B 1 ⋅ 10 7 Hδ = = = 0,8 ⋅ 10 6 А/м. По кривой намагничивания (рис.4.17) находим напряженность 2π μ0 поля магнитопровода H = 94 А/м. Намагничивающая сила обмотки по закону полного тока Iw = Hl + H δ ⋅ δ = 37,5 + 1600 = 1637,5 А. Следовательно, ток обмотки I = 5,46 А. 24 В, Тл 1 2 1,2 1 0,8 0,6 0,4 0,2 0 100 200 300 400 500 600 700 800 900 Н, А/м 1 – листовая электротехническая сталь 3411; 2 – листовая электротехническая сталь 1512. Рис.4.17. Кривые намагничивания стали. П р и м е р На кольцевой однородный магнитопровод (рис.4.18) намотана намагничивающая обмотка с числом витков w = 150 . Наружный диаметр кольца D = 140 мм; внутренний диаметр d = 80 мм, его поперечное сечение квадратное. Определить ток и магнитодвижущую силу обмотки, необходимые для создания в магнитопроводе потока Ф = 1,53 ⋅10 −3 Вб. Чему равно магнитное сопротивление магнитопровода, если он выполнен из электротехнической стали 3411? Ф I w Рис.4.18. Кольцевой однородный магнитопровод Решение. Ток обмотки рассчитывается по формуле I = ФRμ . Для нахождения Rμ w (D − d )4 Ф необходимо определить индукцию B = , где сечение S = = 9 ⋅ 10 −4 м2. 4 S Следовательно, индукция B = 1,7 Тл. Воспользовавшись рис.4.17 для стали 3411, можно найти напряженность магнитного поля H = 3000 А/м. H ⋅ lñð l . Длина = Искомое магнитное сопротивление определяется из соотношения Rμ = μr S B⋅S (D + d ) Hl средней силовой линии в данном случае lср = π = 0,35 м. Найдя ток I = = 7 А, 2 w можно определить намагничивающую силу Iw = 1050 А и магнитное сопротивление Iw Rμ = = 7 ⋅ 10 6 Гн -1. Ф 25 §4.7.6.Катушка индуктивности с магнитопроводом в цепи синусоидального напряжения Основным элементом конструкции различного рода электрических машин и аппаратов, устройств электроавтоматики, промышленной электроники, вычислительной техники является катушка индуктивности. При наличие магнитопровода в катушке индуктивности (такая катушка называется дросселем) значительно возрастает магнитный поток, так как магнитная проницаемость ферромагнитного сердечника на несколько порядков больше магнитной проницаемости воздуха. При подключении катушки с магнитопроводом к источнику синусоидального напряжения u = U m sin(ωt ) по обмотке катушки протекает переменный ток i, магнитодвижущая сила F = iw создает магнитное поле, индуктивность которого характеризуется магнитной индукцией B и магнитным потоком Ф. В реальном дросселе большая часть магнитных линий замыкается по сердечнику (основной магнитный поток). Другая часть магнитных линий охватывает отдельные витки и группы витков обмотки, замыкается по воздуху и, частично, по магнитопроводу (поток рассеяния Ф рас рис.4.19). Ф i ~u Фрас e Рис.4.19. Катушка индуктивности с магнитопроводом. dФ . dt и потоком рассеяния Ф рас , то по второму Переменный магнитный поток индуктирует в обмотке ЭДС самоиндукции eL = − w Если пренебречь сопротивлением обмотки Rîáì закону Кирхгофа ЭДС самоиндукции уравновешивается величиной входного напряжения dФ u = −eL или U m sin(ωt ) = w . dt Из этого уравнения получаем закон изменения во времени магнитного потока: U U Ф = m ∫ sin(ωt )dt = − m cos(ωt ) или Ф = Фm sin(ωt − 90 o ) , w wω т.е. при синусоидальном напряжении на входе катушки, магнитный поток в магнитопроводе также синусоидален. Если величину амплитудного значения магнитного потока выразить через действующее значение напряжения и линейную частоту f, то U Фm = . 4,44 fw Поскольку действующие значения напряжения U и ЭДС самоиндукции EL одинаковы, то E L = 4,44 fwФm . Данное соотношении применяют для расчетов ЭДС, индуктируемых в обмотках трансформаторов и называют уравнением трансформаторной ЭДС. 26 Выясним, какова зависимость между током катушки индуктивности и магнитным потоком при синусоидальном питающем напряжении. По заданной петле гистерезиса и зависимости Ф = Фm sin ωt построим кривую тока (рис.4.20). Ф B Ф(Ф = BS) H t i i= Hl w t Рис.4.20. Форма кривой тока. Из графика видно, что при синусоидальном потоке из-за нелинейности характеристики B(H), т.е. Ф(i) ток несинусоидален. Ток и магнитный поток достигают максимальных значений одновременно, но ток опережает магнитный поток по фазе на угол α. Следовательно, при питании синусоидальным напряжением ток в катушке с ферромагнитным сердечником искажает свою форму и является несинусоидальным во времени. Для упрощения расчетов несинусоидальный ток заменяют эквивалентным синусоидальным, имеющим одинаковое с несинусоидальным током действующее значение и развивающим одинаковую с ним активную мощность. §4.7.7.Схема замещения и векторная диаграмма реальной катушки с магнитопроводом Обмотка реальной катушки с сердечником обладает активным сопротивлением Rобм. Магнитный поток является векторной суммой основного потока в магнитопроводе и потока рассеяния Фраб = Ф + Фσ . Величина основного потока Ф определяется свойствами материала магнитопровода. Поток рассеяния Фσ зависит от конструкции обмотки, взаимного расположения витков, их сечения и составляет 3 ÷ 5 % от основного потока. Потокосцепление рассеяния пропорционально току: Ψ рас = Lрас ⋅ i , где Lрас – индуктивность рассеяния обмотки. 27 С учетом активного сопротивления обмотки RM и потокосцепления рассеяния Ψ рас напряжение на входе катушки dΨ рас dФ di dФ u = Rобм i + +w = Rобмi + L рас + w = u R обм + u L рас + u0 . dt dt dt dt Таким образом, реальную катушку с магнитопроводом можно представить схемой замещения в виде последовательного соединения Rобм , L рас и идеализированной катушки (рис.4.21). У идеализированной катушки обмотка не имеет сопротивления и рассеяния. Свойства идеализированной катушки зависят только от параметров магнитопровода и режима его намагничивания. Ф R i uRобм ~u Lрас uLрас u0 Идеализированная катушка Рис.4.21. Схема замещения катушки индуктивности с сердечником. Напряжение u0 уравновешивает ЭДС индукции идеализированной катушки eL и опережает магнитный поток на 90 . Переход к эквивалентным синусоидам тока дает возможность записывать все соотношения в комплексной форме и пользоваться векторными диаграммами. Комплексное действующее значение входного напряжения запишется в виде U = Rобм I + jωL рас I + U 0 . Схема замещения идеализированной катушки зависит от параметров магнитопровода и режима его намагничивания. Если предположить, что магнитопровод изготовлен из μμ 0 Sw 2 ферромагнетика с линейной зависимостью B = μμ0 H , то Ф = BS = μμ 0 HS = ⋅i и lср выражение напряжения на входе катушки: di di u = Rîáì i + L ðàñ + L , dt dt где L = μμ0 Sw2 lñð - индуктивность идеализированной катушки. Схема замещения реальной катушки для этого случая представлена на рис.4.20.а), соответствующая ей векторная диаграмма на рис.4.22.б). jxрасI R jxрасI jxрас U0 U U0 jxL U I I а) б) 28 Ф Рис.4.22. Схема замещения реальной катушки индуктивности и реальная векторная диаграмма. При учете потерь, обусловленных гистерезисом и вихревыми токами в сердечнике (зависимость B(H) петлевая), ток в обмотке катушки опережает магнитный поток на угол потерь α и может быть разложен на две составляющие. Активная составляющая тока совпадает по фазе с напряжением U0 и называется током потерь Ia = In, она определяется через мощность потерь в стали. Реактивная составляющая тока отстает от напряжения U0 на 90 , называется током намагничивания Ip = Iμ и определяется из закона полного тока. В комплексной форме ток I = I n + jI μ = I ⋅ e jα . Комплексное полное сопротивление идеализированной катушки: U U 0 ⋅ e j 90 U 0 j ( 90 −α ) U 0 cos(90 − α ) + 0 sin(90 − α ) = Rn + jxL . = ⋅e = jα I I I ⋅e I Заменив идеализированную катушку последовательным соединением Rп и xL получаем схему замещения реальной катушки для рассматриваемого случая (рис.4.23,а) ZK = R jxрас R jxрас Rп U U0 U jxL а) gп U0 jbL б) Рис.4.23. Последовательная и параллельная схема замещения нелинейной катушки индуктивности. Переход от последовательной схемы замещения идеализированной катушки к параллельной (рис.4.23,б) проводится по формулам: x R bL = 2 L 2 . g= 2 п 2, Rп + xL Rп + xL Векторная диаграмма реальной катушки индуктивности с магнитопроводом, имеющим петлевое намагничивание представлена на рис.4.24. jxрас I Rобм I U0 U I Iп α Ф Iμ Рис.4.24. Векторная диаграмма реальной нелинейной катушки индуктивности. При расчетах полное сопротивлении катушки индуктивности с магнитопроводом находят по U закону Ома z = . Оно определяется главным образом индуктивным сопротивлением xL = ω L I (xL >> R обм). 29 Приближенно, пренебрегая активным сопротивлением обмотки и рассеянием магнитного U потока, можно определить индуктивность L из соотношения L ≈ или вычислить по Iω потокосцеплению: Ψ Ф w U . L = = m , где Фm = 4,44 ⋅ f ⋅ w I I Эквивалентное активное сопротивление катушки определяется по значению активной мощности и току: P Rэкв = Rобм + Rп = 2 . I П р и м е р . Катушка со стальным сердечником подключена к источнику синусоидального напряжения U = 120 В, частотой f = 50 Гц. Действующее значение тока в обмотке катушки I = 10 А, мощность потерь P = 150 Вт. Сопротивление обмотки Rобм = 0,5 Ом. Определить параметры схемы замещения нелинейной катушки. Магнитным рассеянием пренебречь. R Rобм I ϕ U gn U0 bL U0 ϕ I In Ф Iμ а) б) Рис.4.25. Реальная нелинейная катушка индуктивности. Решение. Мощность потерь в катушке с магнитопроводом состоит из тепловой мощности в обмотке (в меди) и потерь в магнитопроводе (в стали): P = Pм + Pст . Потери в обмотке Pм = I 2 ⋅ Rобм = 100 ⋅ 0,5 = 50 Вт. Потери в стали Pст = P − Pм = 150 − 50 = 100 Вт. P 150 = = 0,125 . U ⋅ I 120 ⋅ 10 На векторной диаграмме (рис.4.25,б) в треугольнике напряжений со сторонами U 0 , I ⋅ Rобм , U угол ϕ находится против стороны U 0 , следовательно, Коэффициент мощности cos ϕ = U 0 = U 2 + ( I ⋅ Rобм ) 2 − 2 ⋅ U ⋅ I ⋅ R ⋅ cos ϕ = 120 2 + 5 2 − 2 ⋅120 ⋅ 5 ⋅ 0.125 = 119.5 В. Активная и реактивная составляющие тока катушки: P 100 = 0.833 А, I п = ст = U 0 119,5 I μ = I 2 − I п2 = 10 2 − 0,8332 = 9,55 А. Сопротивления активной и индуктивной ветвей схемы замещения: P 100 = 144 Ом, Rп = ст2 = Iп 0,8332 30 xL = U 0 119,5 = = 12 Ом. Iμ 9,95 Откуда, L= xL ω = 12 = 0,0383 Гн. 314 §4.8. Вопросы для самопроверки 1. Какая электрическая цепь называется нелинейной? 2. Какие особенности имеют вольтамперные характеристики нелинейных резистивных элементов? 3. Применим ли принцип суперпозиции полей для нелинейных цепей? 4. Справедливы ли законы Кирхгофа для нелинейных электрических цепей? 5. Как осуществляется замена линейного резистора и нелинейного резистора эквивалентным нелинейным элементом? Приведите пример. 6. В чем заключается сущность метода пересечения характеристик? 7. Чем отличаются управляемые нелинейные сопротивления от неуправляемых? 8. В чем суть графического метода расчета нелинейных электрических цепей? 9. Дайте определение статического дифференциального сопротивления. 10. Дайте определение магнитной индукции B , напряженности магнитного поля H , намагниченности γ , магнитной проницаемости μ , магнитного потока Ф. В каких единицах они измеряются, как связаны между собой? 11. Сформулируйте закон полного тока. 12. Как рассчитать неразветвленную магнитную цепь? 13. Запишите формулу для определения магнитного сопротивления Rм и закон Ома для магнитной цепи. 14. Сформулируйте законы Кирхгофа для магнитной цепи. 15. Объясните как влияет длинна воздушного зазора δ в магнитопроводе на значение магнитного потока в нем при постоянстве намагничивающего тока. 16. Проведите аналогию между электрической и магнитной цепью постоянного тока. 17. Какова форма магнитного потока в катушке? 18. Напишите формулу зависимости амплитуды магнитного потока от действующего значения напряжения питания. 19. Объясните в чем причина искажения формы тока в катушке с магнитопроводом. 20. Какова природа потерь в реальной катушке с ферромагнитным сердечником? 21. Какими элементами в схеме замещения катушки с магнитопроводом учитываются потери в обмотке, в сердечнике. 22. Объясните различия между идеализированной и реальной нелинейными катушками. 31 §4.9. Примеры тестов 1. Определить Rэкв, если U2 = 10 В. r1(I) r2(I) I I (A) 3 U2 U 2 2 1 1 U (В) 0 10 20 30 40 50 2. Определить I1, если U = 20 В. I1 r(I) I r(I) I (A) 3 r I2 2 1 U 0 U (В) 10 20 30 40 50 3. Определить I2, если I1 = 1 A, r = 20 Ом. I1 I I2 r(I) r(I) I (A) 3 r 2 1 U 0 U (В) 20 40 60 80 100 (B) 4. Как изменяется величина магнитного потока в сердечнике с уменьшением зазора одном и том же значении тока? i δ ~u Ф 32 δ при Варианты ответов: а) Ф увеличивается; б) Ф уменьшается; в) Ф остается неизменным. 5. Как изменится величина вектора Iμ на диаграмме, если уменьшить воздушный зазор сердечнике катушки? jxs I rI U0 U I Iï Фm Iμ Варианты ответов: а) уменьшиться; б) увеличиться; в) остается неизменной. 6. Как изменится показание ваттметра при уменьшении зазора δ? W ~u δ V A Варианты ответов: а) увеличится; б) не изменится; в) уменьшится. 7. Определить напряженность магнитного поля, создаваемого катушкой, имеющей 50 витков, если по ней течет ток 15 А, а длина средней силовой линии магнитного поля 0,5 м. 8. Определить намагничивающую силу катушки, если напряженность магнитного поля H = 1500 А/м, а длина силовой линии lср = 0,5 м. 9. Какой магнитный поток будет протекать по замкнутому магнитопроводу, если намагничивающая сила обмотки 1200 А, а магнитное сопротивление магнитопровода 4 ⋅ 10 4 Ãí -1 ? 10. Площадь поперечного сечения магнитопровода 0,025 м2, длина 0,5 м, магнитная проницаемость μμ0 = 400. Определить магнитное сопротивление магнитопровода. 33 §4.10. Задачи 1. Определить сопротивление R ' и R '' нелинейного элемента R, включенного в электрическую цепь постоянного тока по его вольт-амперной характеристике I(U) при токах I1 = 40 А и I 2 = 80 А. I, A 80 40 0 20 40 U, B 2. Определить Rэкв, если U2 = 10 В. r1(I) r2(I) I U2 U I (A) 3 2 2 1 1 U (B) 0 10 20 30 40 50 3. Определить I2, если I1 = 1 A, r = 20 Ом. I1 r(I) r(I) I (A) I I2 3 r 2 1 U (B) U 0 20 40 60 80 100 4. Определить напряженность магнитного поля, создаваемого катушкой, имеющей 100 витков, если по ней течет ток 15 А, а длина средней силовой линии магнитного поля 2 м. 5. К обмотке катушки, имеющей 1000 витков, приложено постоянное напряжение 27 В. Какова намагничивающая сила катушки, если ее сопротивление 20 Ом? 6. Какой ток протекает по обмотке электромагнита, если она имеет 500 витков, длина средней силовой линии 2 м, площадь поперечного сечения сердечника 0,25 м2, а магнитный поток в сердечнике 0,45 Вб? Материал сердечника – электротехническая сталь. 7. Площадь поперечного сечения магнитопровода 0,02 м2, длина 0,05 м, относительная магнитная проницаемость 2000. Определить магнитное сопротивление магнитопровода. 34 8. Магнитный поток в сердечнике катушки, по которой протекает ток 4 А, равен 2,5 ⋅ 10 −4 Вб. Какое число витков на единицу длины должна иметь катушка, если сечение сердечника 5 ⋅ 10 −3 м, а относительная магнитная проницаемость материала сердечника μ = 100 ? 9. Магнитный поток в магнитопроводе равен 10 −3 Вб. Определить сечение магнитопровода, выполненного из материалов, кривые намагничивания которых приведены на рис. 4.15, при напряженности магнитного поля 200 А/м. 10. Определить магнитный поток в магнитопроводе, площадь поперечного сечения которого 2 ⋅ 10 −4 м-2, а магнитная индукция 0,8; 1,2; 1,5 Тл. 11. Какова абсолютная магнитная проницаемость ферромагнитного материала, если магнитная индукция в нем 1,5 Тл при напряженности магнитного поля 2250 А/м? Рассчитать относительную магнитную проницаемость материала. 12. Магнитный поток в магнитопроводе равен 10-3 Вб. Определить сечение магнитопровода, выполненного из материалов, кривые намагничивания которых приведены на рис, при напряженности магнитного поля 2000 А/м. В, Тл 2,5 2,0 1,5 1,0 3 1 0,5 0 2 10 20 30 40 50 60 Н, А/м ⋅102 13. Реактор со стальным магнитопроводом, собранным для уменьшения потерь на вихревые токи из тонких, изолированных друг от друга листов, присоединен к сети переменного тока напряжением 142 В и частотой 50 Гц. Показания амперметра и ваттметра в цепи 5,7 А и 106 Вт. Пренебрегая потерями энергии на вихревые токи и в активном сопротивлении реактора, построить векторную диаграмму напряжения, ЭДС, тока, магнитного потока и определить из нее намагничивающую составляющую тока Iμ и активную составляющую Iп, обусловленную потерями на гистерезисе. Определить также cos φ реактора. 35 I P A W Rэкв U V xэкв 14. Амперметр, ваттметр и вольтметр, включенные в цепь реактора со стальным магнитопроводом, дают показания: P = 172 Вт, U = 127 В, I =6 А. Измеренное постоянным током сопротивление реактора r = 2 Ом. Реактор имеет w = 200 витков и питается от сети переменного тока с частотой f = 50 Гц. Построить векторную диаграмму и определить индуктированную в реакторе ЭДС E, максимальный магнитный поток Фm , коэффициент мощности cos φ , мощность потерь в меди Pм , мощность потерь в стали Pст , намагничивающую составляющую тока Iμ, составляющую тока, обусловленную потерями в стали Iст. 36 Модуль 5. Трансформаторы и электрические машины § 5.1. График выполнения задания Модуля 5 № недели Аудиторные занятия Самостоятельная работа 1 Лекция. Обзор теоретического материала модуля 5. Изучение теоретического материала, вопросы 1 – 4. Выполнение 1 пункта задания 2 Практическое занятие. Выдача задания, решение задач по темам модуля. 3 Физический эксперимент. Экспериментальное определение исходных данных для выполнения следующих пунктов задания. 4 Компьютерное моделирование. Исследование внешней характеристики трансформатора. 5 Аудиторная консультация. Численный анализ задания. 6 Прием задания, допуск к тестированию. Сдача задания, тестирование. Изучение теоретического материала, вопросы 5 – 6. Выполнение 2 пункта задания. Подготовка к физическому эксперименту. Изучение теоретического материала, вопросы 7 – 8. Выполнение пункта 3 задания. Подготовка к компьютерному моделированию. Изучение теоретического материала, вопрос 9 – 14. Выполнение пункта 4 – 5 задания. Изучение теоретического материала, вопрос 15 – 20. Выполнение пункта 6 – 9 задания. Подготовка к тестированию. § 5.2. Теоретические вопросы Модуля 5 1. Устройство и принцип действия однофазного трансформатора. [1], [2], [3]. 2. Идеализированный однофазный трансформатор. Уравнения электрического состояния, коэффициент трансформации, схема замещения и векторная диаграмма. [1], [2], [3]. 3. Реальный однофазный трансформатор. Уравнения, схема замещения и векторная диаграмма. [1], [2], [3]. 4. Природа потерь в трансформаторе. Методы определения мощности потерь. Режимы работы трансформатора: холостой ход, короткое замыкание. [1], [2], [3]. 5. Нагрузочный режим трансформатора. Нагрузочные характеристики. Уравнение внешней характеристики. [1], [2], [3]. 6. Устройство и принцип действия автотрансформаторов. [1]. 7. Измерительные трансформаторы. [1]. 8. Особенности трехфазных трансформаторов. [1]. 9. Электрические машины: назначение, классификация. [1], [3]. 10. Конструкция и принцип действия машин постоянного тока. Режимы работы: генератора, двигателя, электромагнитного тормоза. [1], [3]. 37 11. Способы возбуждения машин постоянного тока. [1], [3]. 12. Генератор независимого возбуждения, схема включения основные параметры и характеристики. [1], [3]. 13. Генераторы с последовательным, параллельным и смешанным возбуждением. Схемы включения основные параметры и характеристики. [1], [3]. 14. Двигатели постоянного тока. Свойства саморегулирования. Способы пуска, торможения и регулирования частоты вращения. [1], [3]. 15. Машины переменного тока. Общие сведения, классификация, принцип действия. [1], [3]. 16. Асинхронные двигатели. Устройство трехфазного двигателя. Режимы работы. [1], [3]. 17. Основные параметры и характеристики трехфазного асинхронного двигателя. [1], [3]. 18. Синхронные генераторы. Устройство и принцип действия. Пуск синхронного двигателя. [1], [3]. 19. Электропривод переменного и постоянного тока. Механические характеристики. Классификация режимов работы электропривода.[1], [3], [8]. 20. Системы автоматического управления электроприводами. [1], [3], [8]. § 5.3. Задание модуля 5 Цель задания: изучение устройства, принципа действия, основных характеристик, методов испытания и расчета параметров схемы замещения трансформаторов и электрических машин. Исходные данные: каждому студенту преподаватель выдает вариант задания, номер которого обозначается числом из трех цифр. Первой цифрой варианта задаются параметры двигателя из таблицы 5.1, Второй цифрой варианта задаются параметры двигателя из таблицы 5.2, Третьей цифрой варианта задаются параметры двигателя из таблицы 5.3. Содержание и порядок выполнения задания: 1. Получить у преподавателя вариант задания на обзорной лекции 2. На установочном практическом занятии согласовать пакет задач для самостоятельного решения. 3. Экспериментально исследовать и провести анализ различных режимов работы однофазного трансформатора (см. Методические указания к лабораторному исследованию). 4. Используя данные физического эксперимента, рассчитать параметры Т-образной схемы замещения приведенного трансформатора. 5. Методом компьютерного моделирования исследовать внешнюю характеристику однофазного трансформатора при различных типах нагрузки (см. Методические указания к компьютерному моделированию). Предварительно рассчитать значения сопротивления R, при которых величина ϕ , (таблица 5.5) останется неизменной. 6. Для пуска трехфазного асинхронного двигателя с короткозамкнутым ротором, заданного своими параметрами: • количество пар полюсов р ; • номинальное скольжение s н ,% ; • номинальный момент вращения Мн, Н·м; • критическое скольжение sкр ,%; 38 кратность пускового момента Мп / Мн = m1; • ток статора номинальный Iн, А; • кратность пускового тока Iп / Iн = m2; используется включение в обмотку статора трехфазного автотрансформатора. Определить пусковой ток (статора) и пусковой момент двигателя при прямом запуске и при запуске через автотрансформатор с учетом коэффициента трансформации, найденном в физическом эксперименте. 7. Найти синхронную частоту вращения магнитного поля n1, номинальную частоту вращения ротора n2, максимальный вращающий момент двигателя Мmax и номинальную мощность на валу Р2н. • 8. Полагая, что найденные по результатам физического эксперимента параметры R1 и x1 приведенного трансформатора являются параметрами обмотки ротора асинхронного двигателя, рассчитать ток ротора при номинальном скольжении. Примечание. Падением напряжения в обмотке статора ( R2' и x2' ) пренебречь, т.е. считать что U1 = U0. Параметры асинхронного трехфазного двигателя с короткозамкнутым ротором заданы вариантом задания. 9. Построить графики зависимостей вращающего момента от скольжения М(s) и механической характеристики двигателя n2(М) в режимах от холостого хода до полного торможения. Примечание. Характеристики строить при s = 0, s = sн, s = ( sн + sкр)/2, s = 0,2(1 – sкр), s = 0,4(1 – sкр), s = 0,6(1 – sкр), s = 0,8(1 – sкр), s = 1. § 5.4. Варианты данных к заданию Модуля 5 Таблица 5.1 вариант 1 2 3 5 4 8 р Мн, Н·м; 20 30 35 30 40 18 Iн, А 4 3 25 60 5 6 40 20 Таблица 5.2 вариант sн ,% Мп / Мн = m 1 1 2,3 1,1 2 3,6 1,15 3 5,9 1,12 4 4,2 1,18 5 4,6 1,22 Таблица 5.3 вариант sкр ,%; Iп / I н = m 2 1 12 5,5 2 15 7 3 10 6 4 16 5,5 5 20 6,5 39 § 5.5. Методические указания к лабораторному исследованию задания Модуля 5 Цель исследования: изучение экспериментальных и расчетных методов анализа режимов работы однофазного трансформатора, получение дополнительных исходных данных для выполнения задания. Подготовка к экспериментальному исследованию: 1. Изучить теоретические вопросы: • Устройство и принцип действия однофазного трансформатора. • Идеализированный трансформатор. Коэффициент трансформации. • Реальный однофазный трансформатор. Уравнения электрического состояния, схема замещения и векторная диаграмма. • Режимы работы трансформатора: холостой ход, короткое замыкание, нагрузочный. 2. Подготовить бланк протокола лабораторного исследования. Он должен содержать: • схему электрической цепи для исследования различных режимов работы трансформатора (рис.5.1), • таблицу 5.4, • формулы для расчета коэффициента трансформации по напряжению KU, коэффициента мощности cos φ1, мощности P2, КПД трансформатора η, процентного изменения напряжения трансформатора ΔU2. Таблица 5.4 Измерено Вычислено № п/п U1 I1 P1 U2 I2 P2 cos ϕ1 η ΔU 2 В А Вт В А Вт - % % Режимы 1 2 3 4 … Описание лабораторной установки: Исследуемый трансформатор T2 подключен к выходным зажимам комплекта измерительных приборов К-505 (рис. 5.1). Напряжение, подаваемое на исследуемый трансформатор, регулируется с помощью лабораторно автотрансформатора T1, входные зажимы которого подключаются к автоматическому выключателю сети синусоидального напряжения 220В частотой f = 50 Гц . Исследуемый режим работы трансформатора определяется сопротивлением нагрузки Rн и контролируется с помощью амперметра PA2 и вольтметра PV2. 40 нагрузка ~ 220 B ~ 220 B Рис.5.1. Схема экспериментальной установки. Содержание лабораторного исследования: 1. Исследовать режимы работы однофазного трансформатора: холостой ход, короткое замыкание и с различной нагрузкой. 2. По экспериментальным данным определить основные параметры трансформатора и построить его рабочие характеристики. 3. Используя опытные данные рассчитать параметры Т-образной схемы замещения трансформатора и построить векторную диаграмму. Выполнение лабораторного исследования: 1. Познакомиться с оборудованием и измерительными приборами, используемыми для проведения эксперимента. 2. Записать в протокол номинальные параметры исследуемого трансформатора. 3. Собрать на испытательном стенде электрическую цепь (см. рис.5.1). Внимание! Перед началом каждого опыта движок автотрансформатора T1 должен стоять в нулевом положении. 4. Выполнить опыт холостого хода трансформатора. Для этого: а) отключить Rн; б) установить с помощью автотрансформатора номинальное напряжение U1ном (по вольтметру PV1 комплекта К-505); в) занести в таблицу 5.4 показания приборов. 5. Выполнить опыт короткого замыкания трансформатора. Для этого: а) движок автотрансформатора T1 установить в нулевое положение, сопротивление нагрузки Rн сделать равным нулю; б) автотрансформатором T1 плавно увеличивать напряжение U1 до тех пор, пока ток I1 не будет равен I1ном; в) занести в таблицу 5.4 показания приборов. Внимание! В опыте короткого замыкания U1 << U1ном. 6. Выполнить опыт с различной нагрузкой трансформатора. Поддерживая U1 = U1ном изменять сопротивление нагрузки Rн таким образом, чтобы ток I2 изменялся от 0 до I 2 = I 2 к.з. с шагом 1 А. Показания приборов занести в таблицу 5.4. 7. По экспериментальным данным рассчитать коэффициент трансформации по напряжению KU и коэффициента трансформации по току Ki, значением мощности P2, КПД η , коэффициент мощности cos φ1 и процентное изменения напряжения трансформатора ΔU2. 8. Построить зависимости U2(I2), cos φ1(I2), η (I2) и ΔU2(I2). 41 9. Из опытных данных определить потери в магнитопроводе трансформатора и его обмотках. 10. Изобразить Т-образную сему замещения и векторную диаграмму приведенного однофазного трансформатора. 42 § 5.6. Методические указания к компьютерному моделированию задания Модуля 5 Содержание компьютерного эксперимента: Компьютерное моделирование позволяет качественно получить внешнюю характеристику трансформатора в зависимости от характера нагрузки. Виртуальная схема содержит источник переменной ЭДС, исследуемый трансформатор, комплексную нагрузку, измерительные приборы. Схема соединения элементов изображена на рис.5.2. Рис. 5.2. Схема к компьютерному моделированию. Исходные данные к компьютерному моделированию указаны в таблице 5.5. первая цифра варианта соответствует типу трансформатора, вторая цифра – величине сдвига фаз φ, третья цифра – действующему значению ЭДС. Выполнение компьютерного моделирования: 1. Элементы в электронных библиотеках, используемые в моделировании: • библиотека Sources – источник переменной ЭДС • библиотека Basic – резистор от характера нагрузки. • библиотека Basic – исследуемый трансформатор , конденсатор ; , индуктивность , в зависимости , тип которого задан. библиотека Indicators – измерительные приборы: вольтметры , амперметры . 2. Собрать виртуальную электрическую схему согласно рисунку 5.2, используя заданный тип трансформатора. 3. Выставить величину источника переменной ЭДС E, согласно варианту (таблица 5.5), частотой f = 50 Гц. • 4. Вынести компонент «заземление» из библиотеки Sources и заземлить точку схемы. 43 5. Отключить нагрузку от вторичной обмотки трансформатора и зафиксировать показания , В) приборов в режиме холостого хода. ( U 2 хх = 6. При заданных величинах реактивного элемента L и C (таблица 5.6 и таблица 5.7.), рассчитать значения сопротивления R, при которых величина ϕ , (таблица 5.5) останется неизменной. Таблица 5.5. № Тип трансформатора |φ|, º E, В 1 TS_PQ4_10 85 300 2 TS_PQ4_12 75 150 3 TS_PQ4_16 90 100 4 TS_PQ4_20 80 250 5 TS_PQ4_24 70 200 7. К выходу вторичной обмотки трансформатора подключить активно-ёмкостную нагрузку. Задаваясь величинами резистора и конденсатора из таблицы 5.6, снять внешнюю характеристику. Таблица 5.6. № 1 2 3 4 5 6 7 8 9 10 С, мкФ 20 40 60 80 100 120 140 160 180 200 R, Ом U2, В I2 , A 8. К выходу вторичной обмотки трансформатора подключить активно-индуктивную нагрузку. Задаваясь величинами резистора и индуктивности из таблицы 5.7, снять внешнюю характеристику трансформатора. Таблица 5.7. № 1 2 3 4 5 6 7 8 9 10 мГн 500 450 400 350 300 250 200 150 100 50 R, Ом U2, В I2 , A 9. Построить внешнюю характеристику трансформатора при различных типах нагрузки. Проанализировать результаты моделирования и сделать выводы. 44 § 5.7. Краткая теория и примеры § 5.7.1. Трансформаторы Устройство и принцип действия Трансформатором называется электромагнитный статический (т.е. без движущихся частей) аппарат, предназначенный для преобразования электрической энергии синусоидального тока одного напряжения в другое напряжение той же частоты. Трансформатор имеет не менее двух обмоток, электрически изолированных друг от друга, связанных между собой посредством общего магнитного потока. Работа трансформатора основывается на явлении взаимной индукции (принцип электромагнитного взаимодействия обмоток). Для усиления магнитной связи обмотки трансформатора размещаются на сердечнике, собранном из листовой электротехнической стали. Электромагнитная схема трансформатора представлена на рис.5.3. Ф = Ф1 – Ф2 i1 u1 e1 w1 w2 i2 e2 u2 Rн Рис.5.3. Электромагнитная схема идеализированного трансформатора. На замкнутом ферромагнитном сердечнике расположены две обмотки. К одной из них – первичной – подводится энергия от источника питания. От другой – вторичной обмотки – энергия отводится к приемнику. Все величины (ЭДС, напряжение, ток, число витков), относящиеся к обмоткам, называют соответственно первичными и вторичными. Буквенные значения этих величин снабжаются индексами 1 и 2 соответственно. Под действием подаваемого синусоидального напряжения U1 в первичной обмотке трансформатора возникает ток i1 и МДС F = i1·w возбуждает в сердечнике синусоидальный магнитный поток Ф1. Этот поток, замыкаясь по сердечнику, пронизывает витки обеих обмоток и индуктирует в них ЭДС e1 и e2. По второму закону Кирхгофа e1 уравновешивает u1, e2 создает u2 на выходных зажимах трансформатора. При замыкании вторичной цепи возникает ток i2, который образует собственный магнитный поток Ф2, направленный, согласно правилу Ленца, встречно магнитному потоку Ф1 и стремится его уменьшить. В результате в сердечнике создается общий магнитный поток Ф = Ф1 – Ф2, сцепленный с обеими обмотками и dФ dФ определяющий в них результирующие ЭДС e1 = − w1 и e2 = − w2 . dt dt Поскольку U1 ≈ E1, то при неизменном значении U1 ЭДС E1 тоже постоянна. Т.к. E1 зависит от потока (E1 ≈ 4,44·w1·Фm), то и магнитный поток при любой нагрузке можно считать постоянным. Чтобы результирующий магнитный поток оставался неизменным, магнитный поток вторичной обмотки Ф2 должен быть уравновешен магнитным потоком первичной обмотки Ф1. Поэтому при увеличении нагрузки I2 увеличивается ток I1. Идеализированный трансформатор 45 Допустим, что активные сопротивления обмоток трансформатора равны нулю и потокосцепления рассеяния в них отсутствуют. Такой трансформатор называют идеализированным. Принципиальная схема идеализированного однофазного трансформатора приведена на рис.5.3. Уравнения электрического состояния идеализированного трансформатора: ⎧u1 = −e1 , ⎨ ⎩u2 = −e2 , dФ dФ , e2 = − w2 . dt dt Из этих уравнений получаем соотношение: u1 e1 w1 , = = u2 e2 w2 где e1 = − w1 которое указывает на важнейшее свойство трансформатора преобразовывать (понижать или повышать) напряжение без искажения формы. В идеализированном трансформаторе мощность, потребляемую от сети можно считать равной мощности, отдаваемой в нагрузку: U 1 I1 = U 2 I 2 . Тогда I 2 U1 w1 = = =k, I1 U 2 w2 где k – коэффициент трансформации. При разомкнутой вторичной обмотке идеализированный трансформатор превращается в идеализированную катушку с магнитопроводом (см. Модуль 4). Схема замещения нагруженного идеализированного однофазного трансформатора приведена на рис.5.4 I1 I1 Rп U1 Zн U1 jxμ gп bμ Zн Рис.5.4. Схемы замещения нагруженного идеализированного однофазного трансформатора Реальный трансформатор В реальных трансформаторах учитывается магнитное поле рассеяния и активное сопротивление обмоток. Электромагнитная схема реального трансформатора приведена на рис.5.5. 46 i1 u1 R1 L1рас i2 e1 L2рас R2 e2 u2 Zн Рис.5.5. Электромагнитная схема реального трансформатора. Уравнения электрического состояния реального трансформатора, составленные по второму закону Кирхгофа: di u1 = −e1 + R1i1 + L1 рас 1 ; dt di u 2 = −e2 − R2 i2 − L2 рас 2 , dt di di где L1 рас 1 = −e1σ , L2 рас 2 = −e2σ – ЭДС от потокосцепления рассеяния; dt dt R1i1, R2i2 – падения напряжения на сопротивлениях обмоток. Трансформаторы проектируют так, чтобы рассеяние было много меньше рабочего потока Ф, сопротивление обмоток тоже невелико, поэтому можно приближенно считать, что в реальном трансформаторе U 1 ≈ E1 = 4,44 ⋅ f ⋅ w1 ⋅ Фm . Потери в трансформаторе В трансформаторах различают два вида потерь активной мощности: P = Pм + Pст , где Pм – потери в меди (в обмотках); Pст – потери в стали (магнитопроводе), которые включают в себя потери на гистерезис и потери на вихревые токи. Потери в меди: Pì = I12 R1 + I 22 R2 . Мощность потерь на гистерезис в технических задачах определяют по формуле: Pг = σ г ⋅ f ⋅ Bmn ⋅ G , где σ ã – гистерезисный коэффициент, значение которого зависит от марки электротехнической стали; f – частота приложенного напряжения, Гц; G – масса магнитопровода, кг; Bm – амплитуда магнитной индукции, Тл; n – показатель степени (n = 1,6 при Bm < 1 Тл, n = 2 при Bm > 1 Тл). Мощность потерь на вихревые токи выражается формулой: Pâ = σ â ⋅ f 2 ⋅ γ ⋅ G ⋅ Bm2 , 47 где σ â – коэффициент вихревых токов, зависящий от марки электротехнической стали и конструкции магнитопровода; f – частота, Гц; G – масса магнитопровода, кг; γ – удельная проводимость материала; Bm – амплитуда магнитной индукции, Тл. Потери в обмотках трансформатора определяются из опыта короткого замыкания, потери в магнитопроводе – из опыта холостого хода. Режимы работы трансформатора К основным режимам работы трансформатора относятся: холостой ход, опыт короткого замыкания и режим нагрузки. Каждому режиму соответствуют схемы замещения, которые позволяют рассчитать параметры трансформатора (коэффициент трансформации, коэффициент нагрузки, КПД, потери). Исследование нагрузочного режима трансформатора производится на основе векторных диаграмм, построенных для приведенного трансформатора у которого параметры вторичной обмотки приведены к напряжению U1 и числу витков w1 первичной обмотки. Соответственно, приведенный трансформатор имеет коэффициент трансформации k = 1. При замене реального трансформатора приведенным активные, реактивные, полные мощности и коэффициент мощности вторичной обмотки трансформатора считаются неизменными. Для приведенного трансформатора: 1 E2' = k ⋅ E1 , U 2' = k ⋅ U 2 , I 2' = ⋅ I 2 , R2' = k 2 ⋅ R2 ; k x2' = k 2 ⋅ x2 , z2' = k 2 ⋅ z 2 , z í' = k 2 ⋅ zí ; k - коэффициент трансформации реального трансформатора. Схема замещения приведенного трансформатора приведена на рис.5.6.а), векторная диаграмма, соответствующая схеме замещения – на рис.5.6,б). U1 − R2 I2′ I1 R1 x1рас I2′ R2′ x2' ðàñ R1 I1 ' − jx2' I 2 I0 U1 Rп E1 = E2′ jx1' I 1 U 2′ U 2′ Zн ' − E1 = − E 2 xμ α а) I1 I2 I0 Фm б) Рис.5.6. Схема замещения и векторная диаграмма приведенного трансформатора. При опыте холостого хода к первичной обмотке трансформатора подводится номинальное напряжение U1ном, ток в первичной обмотке I0 составляет 4 – 10 % от I1ном. Уравнение электрического равновесия в комплексной форме: 48 E1 = U 1 − Z 1I 0 ; E2 = U 2 . Схема замещения трансформатора при холостом ходе приведена на рис.5.7. I0 R1 x1рас Rп U1ном xμ Рис.5.7.Схема замещения трансформатора при холостом ходе. Пренебрегая падением напряжения на первичной обмотке трансформатора Z 1 I 0 можно считать, что мощность, потребляемая трансформатором в режиме холостого хода, расходуется в основном на потери в стали Pхх = Pст . Параметры схемы замещения определяются по формулам: U P z μ = 1н ; Rп = хх2 ; xμ = z μ2 − Rп2 . I0 I0 Коэффициент трансформации находится как отношение: E U k= 1 ≈ 1 . E2 U 2 При опыте короткого замыкания к первичной обмотке трансформатора подводится напряжение U1k = 5 – 10 % U1ном. При этом напряжении магнитный поток, определяемый из уравнения U1k ≈ E1k = 4,44 fw1Фm, а, следовательно, и магнитная индукция Bm трансформатора малы. Поэтому потерями в магнитопроводе можно пренебречь и считать, что вся мощность, потребляемая трансформатором, идет на нагрев его обмоток, т.е. P = Pм. При опыте короткого замыкания определяют параметры упрощенной схемы замещения (рис.5.8): U P z1к = 1к , Rк = R1 + R2' = 2к , xк = x1 + x2' = z к2 − Rк2 . I1ном I ном x1рас R1 U1 R2′ x2' ðàñ Рис.5.8. Схема замещения трансформатора при коротком замыкании. Таким образом определить параметры Т-образной схемы замещения трансформатора (рис.5.7,а) можно с помощью данных, полученных из опытов х.х. и к.з. Сопротивление намагничивающей цепи: U 1 хх zμ = . I1 хх 49 Активное и индуктивное сопротивления намагничивающей цепи: P1 хх Rп = 2 , xμ = z μ2 − Rп2 . I1 хх Полное сопротивление короткого замыкания: U 1кз zк = . I1кз Активное и индуктивное сопротивление короткого замыкания: P1кз Rкз = 2 , xêç = zê2 − Rê2 . I1кз Сопротивления первичной обмотки трансформатора: R x R1 = R2' = кз , x1 рас = x2' рас = кз , 2 2 где R2' и x2' рас – приведенные сопротивления вторичной обмотки. Сопротивления вторичной обмотки трансформатора x2' рас R2' R2 = 2 , x2 рас = 2 , k k где k = U1xx – коэффициент трансформации. U 2 xx Нагрузочные характеристики трансформатора Нагрузочные характеристики трансформатора – это зависимости вторичного напряжения U2, коэффициента мощности cos φ1 и коэффициента полезного действия η от тока нагрузки I2 при cos φ2 = const. Зависимость U2(I2) называется внешней характеристикой трансформатора. На основании второго закона Кирхгофа для вторичной цепи уравнение внешней характеристики записывается в виде: U 2 = E 2 − ( R2 + jx2 ) I 2 . Внешняя характеристика трансформатора при различных характерах нагрузки представлена на рис.5.9. U2 cos φ2<1, при φ2 <0 cos ϕ2 = 1 cos φ2 <1, при φ2 > 0 I2 Рис.5.9. Внешние характеристики трансформатора. 50 P2 зависит от режима работы трансформатора и P1 может определяться методом косвенного измерения, основанного на прямом измерении потерь в трансформаторе: K З ⋅ P2 , η= K З ⋅ P2 + P0 хх + K З2 ⋅ Pкз Коэффициент полезного действия η = где K З = I2 I 2 ном = I1 I1ном – коэффициент загрузки. Вид характеристики η(I2) представлен на рис.5.10. η I2 I2ном Рис.5.10. КПД трансформатора при различной величине нагрузки. В режиме холостого хода η = 0 . При малых значениях нагрузки, когда потери в обмотках не велики, а потери в магнитопроводе соизмеримы с полезной мощностью P2 , значение КПД небольшое. С увеличением тока нагрузки КПД трансформатора растет и достигает наибольшего значения при равенстве потерь в обмотках и потерь в магнитопроводе ( Pкз = P0 хх ). При увеличении нагрузки сверх I 2 ном потери в обмотках много больше потерь в магнитопроводе и КПД незначительно снижается. П р и м е р . В однофазном трансформаторе используется магнитопровод с активным сечением 20 см2, работающий в номинальном режиме с магнитной индукцией B = 1,2 Тл. Число витков первичной и вторичной обмоток w1 = 400 и w2 = 50 , частота переменного напряжения сети 50 Гц. Определить ЭДС одного витка трансформатора, ЭДС первичной и вторичной обмоток, а также коэффициент трансформации. Решение. Максимальный магнитный поток одинаков для обеих обмоток и ЭДС одного витка равна: E0 = 4,44 ⋅ f ⋅ Фm = 4,44 ⋅ 50 ⋅ 2,4 ⋅10 −3 = 0,53 В. ЭДС обмоток пропорциональны числу их витков, т.е. E1 = w1 E0 = 212 В и E2 = w2 E0 = 26,5 В. Коэффициент трансформации равен k = w1 E1 = =8. w2 E2 П р и м е р . Показания амперметра и вольтметра при опыте короткого замыкания составляют U ê = 190 В, I1ном = 5 А, мощность потерь в меди равна 400 Вт. Определить параметры схемы замещения трансформатора (см. рис.5.11), если k = 4 , а активное и реактивное сопротивления первичной обмотки R1 = 2 Ом и x1 = 15,7 Ом. Найти коэффициент мощности трансформатора. 51 R1 Uк x1 R2 ⋅ k x2 ⋅ k 2 2 I1н Рис.5.11 Схема замещения трансформатора. Решение. Активное сопротивление короткого замыкания P 400 Rк = 2кз = 2 = 16 Ом, I1ном 5 полное сопротивление: zк = U 1к I1ном = 190 = 38 Ом. 5 Следовательно, реактивное сопротивление короткого замыкания xк = z к2 − Rк2 = 34,5 Ом. Приведенные к первичной обмотке активное и индуктивное сопротивления вторичной обмотки R2' = Rк − R1 = 16 − 2 = 14 Ом, и x2' = xк − x1 = 34,5 − 15,7 = 18,8 Ом. Активное и индуктивное сопротивления вторичной обмотки R2 = R2' 14 = = 0,875 Ом, k 2 42 и x2' 18,8 = 2 = 1,18 Ом. k2 4 Коэффициент мощности трансформатора в режиме короткого замыкания cos ϕ = 0,423 . x2 = § 5.7.2. Электрические машины Электрические машины представляют собой электромеханические устройства, в которых происходят преобразования энергии. В генераторах механическая энергия преобразуется в электрическую, в двигателях – электрическая энергия в механическую. Каждая электрическая машина обладает свойством обратимости, т.е. может работать в качестве двигателя и генератора. По роду тока электрические машины подразделяются на машины переменного тока и машины постоянного тока. Электрические машины постоянного тока Электрическая машина постоянного тока (рис.5.12) состоит из неподвижной части – статора (1), подвижной части – якоря (2) и щеточно-коллекторного узла (3). В соответствии с законом электромагнитной индукции, при вращении якоря в магнитном поле полюсов в обмотке якоря 52 наводятся переменные ЭДС, т.е. ЭДС индукции наводится в витках, движущихся в неподвижном магнитном поле. Статор является механическим остовом машины. Станина изготавливается из литой стали. На станине укрепляются основные магнитные полюса, которые служат для создания магнитного потока, и вспомогательные - для улучшения коммутации в машине. Главный полюс состоит из сердечника, укрепленного на станине болтами, и обмотки возбуждения, т. е. представляет собой электромагнит. Сердечник полюса изготавливается из листовой стали и на свободном конце снабжается полюсным наконечником, для создания требуемого распределения магнитного поля в воздушном зазоре машины. Электромагниты (полюсы) создают в машине постоянное по величине и неподвижное в пространстве магнитное поле. Путь магнитных линий в генераторе постоянного тока показан на рис.5.12. Верхний полюс является южным, нижний - северным. Показанная магнитная система имеет одну пару полюсов. S 1 2 n 3 1 N Рис. 5.12. Машина постоянного тока 53 Существуют и более сложные магнитные системы, содержащие два северных и два южных полюса. В этом случае направление токов в обмотках возбуждения выбирается с таким расчетом, чтобы соседние полюсы были разноименными, т.е. чтобы рядом с северным находился южный полюс и т.д. Такая магнитная система имеет две пары полюсов. Существуют машины и с большим числом полюсов, но их число будет непременно четным. В современных электрических машинах малой мощности возбуждение осуществляется постоянными магнитами. При этом габариты машины уменьшаются, исключаются потери на нагрев обмотки возбуждения и возрастает КПД. Электрические машины с постоянными магнитами более технологичны, их производство легко автоматизировать. Якорь машины постоянного тока представляет собой стальной зубчатый сердечник, в пазах которого расположены витки обмотки. Эти витки соединены между собой последовательно и образуют замкнутую цепь. При вращении якоря магнитный потокосцепление будет меняться. В результате в каждом из витков будет возникать переменная ЭДС. Во всех витках, расположенных по одну сторону нейтральной линии, ЭДС будут иметь один и тот же знак. Нулевое значение напряжения будет наступать в одном и том же месте, а именно, на нейтральной линии, расположенной симметрично относительно северного и южного полюсов. Обмотка якоря является замкнутым контуром, но тока в нем не возникает, т. к. сумма мгновенных значений ЭДС всех последовательно соединенных витков обмотки равна нулю (машина симметрична). Если на геометрическую нейтраль установить неподвижные щетки и создать скользящий контакт между щетками и обмоткой, то обмотка будет представлять собой две параллельные ветви, в каждой из которой будут проводники с одинаково направленными ЭДС. Иначе говоря, получаем два параллельных источника ЭДС, состоящих из группы проводников, в каждый момент времени оказывающихся под южным и северным полюсом соответственно. При этом в каждой из обмоток индуктируется переменная ЭДС, а напряжение на зажимах машины постоянно. Если обмотку якоря через щетки замкнуть на сопротивление нагрузки, то в цепи возникнет ток, складывающийся из токов ветвей. Осуществление скользящего контакта между щетками и обмоткой якоря возможно при удалении изоляции на узкой полосе наружной поверхности обмотки, когда щетки касаются оголенных проводов. В действительности же (в современных конструкциях) щетки касаются медных клинообразных пластин, собранных в цилиндр – коллектор, установленный на валу машины. Пластины коллектора изолированы друг от друга и от вала и соединяются с обмоткой якоря проводниками. Отвод тока от коллектора осуществляется гибким кабелем через щетки, установленные в щеткодержателях. Электрическая машина постоянного тока, как и другие машины, представляют собой два электромагнитно связанных контура, причем намагничивающая сила (НС) одного из этих контуров поддерживает основное магнитное поле. Этим контуром в машине постоянного тока является обмотка возбуждения машины, а вторичным контуром - обмотка якоря. Пока во вторичном контуре нет тока, этот контур не оказывает влияния на магнитное поле, создаваемое первичным контуром. Но как только в якоре появляется ток, то в магнитной цепи машины возникает дополнительная НС, искажающая и магнитный поток машины. Это явление получило название реакции якоря. Из-за реакции якоря происходит снижение ЭДС машины, некоторое снижение главного магнитного потока, а также ухудшаются условия коммутации машины. Для компенсации реакции якоря между основными полюсами устанавливают дополнительные полюсы, токи обмоток которых создают магнитный поток, противоположный магнитному потоку якоря. Обмотки дополнительных полюсов последовательно соединяют с обмоткой якоря, с тем, чтобы с увеличением тока якоря увеличивалось их компенсирующее действие. Потери мощности в электрических машинах невелики и составляет 5 – 15% преобразуемой мощности. В целях увеличения магнитного потока и уменьшения потерь на перемагничивание, при изготовлении машин используют специальные сорта стали. Машины постоянного тока изготавливаются на мощности от долей ватт до 12 МВт. Номинальное напряжение их не 54 превышает 1500 В. Частота вращения машин колеблется в широких пределах – от нескольких оборотов до нескольких тысяч оборотов в минуту. Все электрические машины постоянного тока обратимы: могут работать в режимах генератора и электродвигателя. Цепь возбуждения и цепь якоря в машинах постоянного тока по отношению к сети могут быть включены различными способами. По способу возбуждения генераторы постоянного тока подразделяют на генераторы с независимым возбуждением и на генераторы с самовозбуждением. У генераторов с независимым возбуждением, например, рис.5.13,а) цепь возбуждения питается от независимого постороннего источника, которым может служить другая машина постоянного тока или аккумулятор. У генераторов с самовозбуждением цепь возбуждения питается непосредственно от самого генератора. Генераторы постоянного тока с самовозбуждением делятся в свою очередь на генераторы с параллельным возбуждением, генераторы с последовательным возбуждением и генераторы со смешанным возбуждением. Для регулирования ЭДС машины достаточно менять ток в цепи возбуждения с помощью регулировочного реостата, который включается последовательно с обмоткой возбуждения. У генераторов с параллельным возбуждением рис.5.13,б) цепь возбуждения подключается к щеткам якоря генератора параллельно внешней цепи: I я = Iн + Iв где: I я – ток якоря, I н – ток нагрузки, I в – ток возбуждения. У генераторов с последовательным возбуждением обмотка возбуждения соединяется последовательно с цепью якоря и с цепью внешней нагрузки. У генераторов со смешанным возбуждением рис.5.13 в) имеются две обмотки возбуждения: одна включается параллельно, а другая последовательно с внешней цепью. ЭДС якоря машины постоянного тока пропорциональна скорости вращения якоря и магнитному потоку полюса машины: pN E = Cе nФ = ⋅ n ⋅Ф 60a где: Cе – постоянная, зависящая от конструктивных данных машины, n – частота вращения якоря, Ф – результирующий магнитный поток, p – число пар полюсов статора, N – число активных проводников обмотки якоря, 2a – число пар параллельных ветвей обмотки. Из этого выражения видно, от чего зависит в машине постоянного тока величина ЭДС и каким путем можно ее регулировать. В машине, работающей в режиме генератора, скорость вращения остается при работе постоянной, поэтому регулирование ЭДС генераторов осуществляется изменением магнитного потока путем изменения тока возбуждения. При работе машины в режиме двигателя скорость вращения изменяется при изменениях механической нагрузки. Кроме того, регулирование скорости вращения двигателей постоянного тока производится путем изменения тока возбуждения. 55 Rн Rн Rн Iв посл = Iн Iн Iн = Iя ОВпосл Iя Я Rр Iя Я Iв ОВ Rр Я Iв парал Rр ОВпарал ОВ Iв + – а) б) в) Рис.5.13. Генераторы постоянного тока с: а) независимым возбуждением, б) параллельным возбуждением, в) смешанным возбуждением. В генераторах постоянного тока происходит преобразование механической мощности вращения ротора: 2π Mn P1 = Mn = 60 9,55 где: M – вращающий момент на валу ротора с якорной обмоткой, n – частота вращения ротора. в электрическую мощность: Pэ = EI я где: E – ЭДС якорной обмотки, I я – ток в якорной обмотке. В нагрузке, подключаемой к якорной обмотке через коллектор, выделяется мощность P2 = UI КПД генератора находится как: η= Где ∑P P2 P2 100% = 100% P1 P2 + ∑ P – суммарная мощность потерь. Напряжение на выводах генератора: U G = EG − I я R я , 56 где: Rя – сопротивление цепи якоря, приведенное к рабочей температуре обмоток t=+750С. К основным характеристикам генераторов постоянного тока относятся: • характеристика холостого хода EG = f ( I в ) – зависимость ЭДС генератора от тока возбуждения при разомкнутой внешней цепи, т.е. при I = 0, и при постоянстве скорости вращения машины n=соnst. Характеристика холостого хода дает представление о степени насыщения стали машины и имеет петлевой характер. • внешняя характеристика U G = f ( I я ) отражает изменение напряжения на зажимах машины при изменении тока в цепи якоря (нагрузки) при n=соnst и I в = соnst (для независимого возбуждения) или Rв = соnst (при самовозбуждении). Для генераторов постоянного тока эту зависимость можно выразить как U G = EG − I я R я , где Rÿ – сопротивление цепи якоря. • регулировочная характеристика I в = f ( I я ) , при U = соnst, n = соnst. Она показывает, как надо изменять ток возбуждения, чтобы при изменении нагрузки напряжение на генераторе оставалось неизменным. Все двигатели постоянного тока могут быть отнесены к группе машин постоянного тока с независимым возбуждением. Различают двигатели с параллельным, последовательным и смешанным возбуждением. Пуск в ход двигателей при питании от источника постоянного напряжения осуществляется с помощью реостата Rп , включаемого в цепь якоря, при этом происходит ограничение пускового тока до предельно допустимого. В двигателях постоянного тока происходит преобразование электрической мощности в Mn . электромагнитную Pэм = EI я , а затем в механическую мощность вращения якоря P2 = 9,55 Вращающий (электромагнитный) момент двигателя и частота вращения определяются выражениями: pN E М= I яФ = C м I яФ , n = 2πa C eФ где: C м = 9,55Ce . Независимо от способа возбуждения уравнение электрического состояния цепи якоря имеет следующий вид: U = E + I я Rя Учитывая, что E = Ce nФ = pN получим уравнение частотной характеристики двигателя. 60a U − I я Rя U − E U − Ce nФ Iя = = , n= Rя Rя C eФ К основным характеристикам двигателей относятся: рабочие M = f ( P2 ) , n = f ( P2 ) , I = f ( P2 ) , P1 = f ( P2 ) или P1 = f ( I я ) и механическая n = f (M ) при U = соnst и Iв = соnst. Наиболее важные режимы работы двигателей: пуск в ход, регулирование частоты вращения, торможение и реверсирование. 57 Пуск в ход двигателей при питании от источника постоянного напряжения осуществляется с помощью реостата Rn, включаемого в цепь якоря (рис.5.14.). При этом происходит ограничение пускового тока до предельно допустимого значения. + – + ОВ Rп Rп Я + – ОВпосл Rп Я Я Rр ОВ а) – Rр ОВпарал б) в) Рис.5.14. Двигатели постоянного тока с: а) параллельным возбуждением, б) последовательным возбуждением, в) смешанным возбуждением. Частота вращения двигателя регулируется тремя способами: • изменением напряжения цепи якоря, • изменением тока возбуждения, т.е. Ф = f(Iв), • введением добавочного сопротивления в цепь якоря. Существует три способа электромагнитного торможения двигателей постоянного тока: • рекуперативное (с возвратом энергии в сеть), • динамическое, • противовключение. П р и м е р . Для двигателя постоянного тока независимого возбуждения заданы следующие номинальные параметры: Pном = 130 кВт; U ном = 220 В; n = 600 об/мин; η = 92 %; R я = 0,01 Ом; C м = 65 . Определить номинальный ток якоря, ЭДС и вращающий момент двигателя, магнитный поток одного полюса и электромагнитную мощность. Решение. Так как в паспорте на двигателе указывается номинальная механическая мощность P P2 , то потребляемая P1 = 2 = 141 кВт. Ток якоря находим (при параллельном возбуждении) из η соотношений I н = P1н Uн = 645 А. ЭДС определяем по формуле: U = E + I я ( Rя + R р ) ; 58 E = 220 − 645 ⋅ 0,01 = 213,5 В. Электромагнитная мощность: Pэм = E ⋅ I я = 137 кВт. Вращающий момент двигателя: M = C м I яФ , а магнитный поток: Ф= E E = 9,55 . n ⋅ Ce n ⋅ Cм Окончательно: Ф = 0,052 Вб и М = 2,2 кН ⋅ м . П р и м е р . Для двигателя параллельного возбуждения заданы следующие номинальные параметры: U ном = 110 В, R я ном = 0,012 Ом, nном = 600 об/мин, I я ном = 500 А. Определить вращающий момент двигателя при токе I я = 300 А и постоянном напряжении U = 100 В. Построить рабочую характеристику M = f (I ) в пределах от 0 до 1,5 ⋅ I ном . Решение. Рабочую характеристику M = f ( I ) можно рассчитать, по формуле: M = Cм I я ⋅ E I ⋅E ⋅ = 9,55 ⋅ я . Cе n n Частота вращения также зависит от тока якоря U − I я Rя U − I я Rя . n = nном = nном U ном − I я ном R я E Окончательно получаем: (U ном − I я ном R я ) Iя Iя 9,55 ⋅ E 2 M= . ⋅ = 9,55 ⋅ ⋅ nном E − I я Rя nном U − I я Rя 2 Подставляем исходные данные, находим расчетное уравнение: Iя n = 168 ⋅ . 100 − I я 0,012 График зависимости M = f ( I я ) в диапазоне изменения тока от 0 до I я ном приведен на рисунке 5.15. M, Н⋅м 500 400 300 200 100 0 60 120 180 240 Рис.5.15. График зависимости M = f ( I я ) . 59 Iя, А При заданном в условии токе I я = 300 А момент равен 526 Н ⋅ м . П р и м е р . Определить номинальный момент на валу M ном , номинальные суммарные потери мощности ∑P ном и номинальный КПД η ном электродвигателя постоянного тока типа П62 с параллельным возбуждением при номинальном режиме работы, если номинальные данные, указанные на его щитке: полезная мощность на валу P2 ном = 8 кВт, напряжение U íîì = 200 В, частота вращения nном = 1000 об/мин, ток, потребляемый из сети, I ном = 43 А. Решение. Номинальный момент на валу электродвигателя: P1 ном 8 ⋅10 3 M ном = 9,55 ⋅ = 9,55 = 76,5 Н ⋅ м . nном 1000 Номинальная мощность, подведенная к электродвигателю из сети: P1 ном = U ном ⋅ I ном = 220 ⋅ 43 = 9460 Вт. Номинальные суммарные потери мощности в электродвигателе: ∑P ном = P1 ном − P2 ном = 9,46 − 8 = 1,46 кВт. Номинальный КПД электродвигателя: P 8 η ном = 2 ном = = 0,85 или η ном % = 85 % . P1 ном 9,46 П р и м е р . Генератор параллельного возбуждения имеет следующие данные: U ном = 230 В, I я ном = 780 А, I в ном = 4,5 А и R я = 0,018 Ом. Построить внешнюю характеристику генератора в режимах холостого хода и короткого замыкания. Решение. На основании выражений: p ⋅ n1 60 можно найти исходную расчетную зависимость, учитывая, что ЭДС является функцией тока U . Таким возбуждения Eв = f ( I в ) , а ток возбуждения зависит от напряжения генератора I в = Rв образом, ток нагрузки в данном случае определяется из соотношения: E − I в Rв E −U Iя = или I я = . Rя Rя E = 4,44 ⋅ f ⋅ w1 ⋅ k w1 ⋅ Ф , f = Для того чтобы воспользоваться универсальной магнитной характеристикой, необходимо знать, что ее аргумент и функция находятся по соотношениям: I U Ф E xф = в = = , yф = . I ном U ном Фном Eном С их помощью расчет сводится к линейным преобразованиям Eном yф − U ном xф U xф = , Iя = , U ном Rя где номинальное значение ЭДС: E ном = U ном + I я R = 244 В и проводимость якорной цепи 1 = 55,5 Ом -1. Rя В соответствии с полученными выражениями ток якоря равен нулю при: 60 yф xф = U ном = 0,943 . Eном По универсальной магнитной характеристике это соответствует значению аргумента xф = 1,04 или напряжению U = 240 В. При коротком замыкании, т.е. при напряжении, равном нулю, ток Eном ⋅ yф (0) Iя = = 6,77 А. Rя График внешней характеристики генератора приведен на рисунке. U, В 200 150 100 50 0 1000 2000 3000 I я , А Рис.5.16. График внешней характеристики генератора. Электрические машины переменного тока Машины переменного тока подразделяются на синхронные и асинхронные. Асинхронные машины используются в основном, как двигатели. В режиме торможения они работают как генераторы. Синхронные машины переменного тока получили наибольшее распространение как трехфазные генераторы, в основном это все генераторы на современных электрических станциях. Трехфазные синхронные двигатели преимущественно применяются в качестве привода мощных производственных машин. Асинхронная машина – такая машина, в которой преобразование энергии осуществляется посредством вращающегося магнитного поля, возбуждаемого переменным током частотой f1, поступающим из сети. Основным принципом работы является то, что ротор вращается со скоростью n2 отличающейся от скорости вращения магнитного поля n1, называемой синхронной скоростью двигателя. В большинстве асинхронных двигателей магнитное поле создается системой трехфазного тока. При работе в качестве двигателя ротор вращается медленнее, чем магнитное поле. Если ротор с помощью первичного двигателя вращается быстрее, чем магнитное поле, то машина является генератором. Как в режиме двигателя, так и режиме генератора скорость вращения ротора асинхронной машины зависит от нагрузки. Неподвижная часть машины – статор, состоит из стального сердечника и расположенных на нем трех обмоток, оси которых сдвинуты на угол 120° одна относительно другой. Обмотки подключены к источнику трехфазного тока. Сердечник статора имеет форму полого цилиндра, вдоль внутренней поверхности которого, сделаны пазы. В диаметрально противоположных пазах статора уложены обмотки трех катушек. Если катушки статора соединить между собой в звезду или треугольник, то симметричная трехфазная цепь питания создает в магнитной системе машины вращающееся магнитное поле. Ротор, представляет собой цилиндрический сердечник, в диаметрально противоположных пазах которого, уложены короткозамкнутые витки. При вращении магнитного поля токов статора со скоростью n1, в проводниках ротора наводится ЭДС. Под действием ЭДС в 61 короткозамкнутых витках ротора протекает ток, взаимодействующий с вращающимся магнитным полем. Это взаимодействие проявляется в возникновении электромагнитных сил, действующих на ротор. Если электромагнитные силы, действующие на неподвижный ротор, превышают тормозной момент на его валу, то он получает ускоренное движение в направлении вращения магнитного поля. По мере возрастания скорости вращения ротора относительная скорость движения его проводников в равномерно вращающемся поле уменьшается, вследствие чего уменьшается и величина тока в них. Процесс изменения тока и скорости вращения ротора прекратится, как только наступит устойчивое равновесие между моментом электромагнитных сил, вызывающих вращение ротора, и тормозным моментом, создаваемым устройством, приводимым в движение электрической машиной. В этих условиях ротор машины будет вращаться с постоянной скоростью, отличной от скорости вращения поля. Таким образом, принцип работы асинхронных двигателей основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках ротора. Одной из важнейших величин, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимают отношение: n −n s % = 1 2 100% n1 где: n2 – частота вращения ротора; n1 = 60 f – частота вращения магнитного поля; p p – число пар полюсов двигателя. Для большинства современных типов асинхронных двигателей скольжение ротора при номинальной нагрузке заключено в пределах 2 – 6%. При отсутствии нагрузки, когда двигатель работает вхолостую, и вращению ротора препятствуют лишь незначительные силы трения, скольжение очень мало и не превосходит десятых долей процента. С увеличением нагрузки скорость вращения ротора уменьшается, а скольжение и вращательный момент соответственно увеличиваются. Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора двигателя можно рассматривать как первичную обмотку трансформатора, а обмотку ротора - как вторичную. Особенностью двигателя по сравнению с трансформатором является то, что в его статорной и роторной обмотках действуют ЭДС и токи разных частот. Величины этих ЭДС определяются по формулам: E1 = 4,44 w1 f1 K об 1Фм ; E 2 = 4,44w2 f 2 K об 2Фм , где: E1 – ЭДС обмотки статора, E2 – ЭДС обмотки неподвижного ротора, K об 1 и K об 2 – соответственно обмоточные коэффициенты обмоток статора и ротора, w1 и w2 – число обмоток статора и ротора, Фм – основной магнитный поток, f1 – частота тока цепи обмоток статора, 62 f 2 = sf1 – частота ЭДС ротора. Из этого соотношения следует, что частота ЭДС ротора пропорциональна скольжению. При неподвижном роторе f 2 = f1 , т.е частота тока и ЭДС ротора равна частоте ЭДС и тока статора и равна частоте питающего напряжения. Векторная диаграмма в этом режиме, называемым холостым ходом, аналогична соответствующей векторной диаграмме трансформатора. ЭДС во вращающемся роторе E2 s = sE2 Индуктивное сопротивление вращающегося ротора: x2 s = 2πf 2 L2 = 2πsf1 L2 = sx2 Активное сопротивление ротора R2 не зависит от частоты. По закону Ома ток в роторе равен: E2 s I 2s = = R22 + x22s sE2 R +s x 2 2 2 = 2 2 E2 2 ⎛ R2 ⎞ 2 ⎜ ⎟ + x2 ⎝ s ⎠ Электрическая мощность, подведенная к двигателю из сети P1 = 3U 1 ф I 2 ф cos ϕ1 , преобразуется в нем в механическую. Преобразование энергии сопровождается потерями. Часть подводимой мощности тратится на потери в стали машины – Pст и на нагрев обмотки статора Pм стат . Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью Pэм . Часть мощности, переданной на ротор, тратится на нагрев меди обмоток ротора Pм рот и зависит от скольжения Pм рот = sPэм . Остальная часть мощности называется полной механической мощностью Pмех . Если из полной механической мощности вычесть механические потери Pмех и добавочные потери Pдоб то получится полезная мощность на валу двигателя P2 . КПД асинхронного двигателя: η= где ∑P = P ст P1 − ∑ P P1 , + Pм стат + Pм рот + Pмех + Pдоб . Величина КПД асинхронных двигателей составляет от 0,7 до 0,9 и выше. Механическая мощность ротора: 2πn2 , Pмех = Mω 2 = M 60 где М – вращающий момент двигателя. Электромагнитная мощность вращающегося магнитного поля: 2πn1 Pэм = Mω1 = M 60 Основные режимы работы асинхронного двигателя: • пуск двигателя в ход, • холостой ход двигателя, • рабочий режим двигателя. Рабочий режим двигателя при номинальной нагрузке характеризуется номинальными параметрами различными для каждого асинхронного двигателя. Основным номинальным 63 параметром асинхронного двигателя является его номинальная мощность Pном . Это мощность выражается в киловаттах и соответствует той наибольшей механической мощности на валу двигателя, которая может быть полезно отдана механизму, приводимого двигателем во вращение. Работа двигателя с нагрузкой превышающей его номинальную мощность, рассматривается как перегрузка и потому длительно не допустима. Вторым параметром двигателя является его номинальная скорость вращения nном . Важным электрическим параметром является напряжение, для которого предназначен двигатель U ном . Номинальный ток двигателя устанавливается, исходя из номинальной мощности двигателя и номинального напряжения. К номинальным параметрам относят также номинальный коэффициент мощности двигателя. Номинальный момент M ном часто вычисляют по упрощенной формуле, учитывая номинальные значения величин: P P M = 975 2 (кГм.) или M = 9550 2 (Н·м.) n2 n2 Для расчета зависимости вращающего момента асинхронного двигателя от скольжения с достаточной точностью применяется упрощенная формула: 2 M max , M= s s кр + s кр s где: M max – максимальный вращающий момент, sкр – критическое скольжение, при котором вращающий момент достигает своего максимального значения, его величина зависит от активного сопротивления цепи ротора. При известном номинальном скольжении критическое определяется по формуле: 2 ⎛ ⎞ ⎛ M max ⎞ ⎜ M max ⎟⎟ − 1 ⎟⎟ s кр = s ном ⎜ + ⎜⎜ ⎜ M ном ⎟ ⎝ M ном ⎠ ⎝ ⎠ Зависимость вращающего момента от его скольжения или, от скорости вращения ротора называют механической характеристикой двигателя. M = f (n2 ) , при U = const , f1 = const . Для оценки рабочих свойств двигателя пользуются его рабочими характеристиками. Рабочими характеристиками асинхронного двигателя называют кривые, характеризующие зависимость электромагнитного момента M , тока статора I1 , КПД η , и коэффициента мощности на валу cos ϕ от полезной мощности P2 на валу при неизменном напряжении и частоте питающего напряжения U = const , f1 = const . В зависимости от конструктивного выполнения роторной обмотки трехфазные асинхронные двигатели разделяются на два типа: • двигатели с короткозамкнутым ротором; • двигатели с фазным ротором. При пуске двигателя с короткозамкнутым ротором скорость вращения ротора в первый момент n2 = 0 , чему соответствует максимальное скольжение s = 1 , двигатель находится в режиме короткого замыкания. Ток в роторе имеет наибольшее значение и наибольший сдвиг фаз по отношению к ЭДС. При этом пусковой ток статора в 4 – 10 раз больше номинального. Пусковой момент составляет 0,9 – 1,8 от номинального момента. По мере разгона двигателя величина пускового тока быстро уменьшается. Большая величина пускового тока вызывает резкие колебания напряжения в сети, что плохо отражается на работе других потребителей. При включении двигателей в мощные энергосистемы эти колебания нивелируются, поэтому 64 используется прямой пуск - включением обмотки статора на полное напряжение цепи. Для уменьшения пускового тока асинхронных двигателей с короткозамкнутым ротором применяют способы, позволяющие понизить на время пуска напряжение, подводимое к статору: переключение обмотки статора со звезды на треугольник, запуск двигателя через автотрансформатор, включение дополнительного сопротивления в обмотку статора. При запуске двигателя через автотрансформатор уменьшение пускового тока в цепи произойдет в k 2 раз, где k - коэффициент трансформации автотрансформатора. Однако недостатком этих способов является уменьшение пускового момента, величина которого пропорциональна квадрату напряжения сети: M ≅ U 2 . Асинхронный двигатель с фазным ротором пускается в ход с помощью пускового реостата, включенного последовательно с обмоткой ротора. Пусковые качества двигателей характеризуются коэффициентами кратности пускового тока I пуск M и пускового момента пуск . I ном M ном Частота вращения двигателя регулируется изменением частоты вращения магнитного поля (частоты питающего напряжения), переключением пар полюсов, изменением активного сопротивление фазного ротора с помощью трехфазного реостата, включаемого так же как пусковой. В синхронном двигателе частота вращения двигателя равна частоте вращения магнитного 60 f1 поля: n2 = n1 = . p Основными характеристиками синхронного двигателя являются угловая, механическая и регулировочная. Угловая характеристика определяет зависимость вращающего момента от угла между ЭДС и напряжением: 9,55 9,55 = 3E0U sin θ M = 3E0 I cos ϕ n2 n2 x1 где: θ – угол между векторами ЭДС и напряжения, т.е. cosθ = E , U x1 – полное индуктивное сопротивление двигателя. На специальных электростанциях, покрывающих пиковые нагрузки в энергосистемах, синхронная машина работает генератором в часы максимума нагрузки и двигателем – в остальное время, перекачивая с помощью гидротурбины, которая теперь становится насосом, воду в водохранилище, создавая необходимый запас её для последующей работы. Такие агрегаты называют обратимыми. Синхронная машина состоит из двух частей: неподвижной части – статора и вращающейся части – ротора и имеет две обмотки. Одна обмотка подключается к источнику постоянного тока и создает основное магнитное поле машины. Это обмотка возбуждения. Другая обмотка является обмоткой якоря и состоит из одной, двух или трех фаз. В обмотке якоря индуцируется основная ЭДС машины. В синхронных машинах наибольшее распространение получила конструкция, когда обмотка якоря располагается на статоре, а обмотка возбуждения – на роторе. Особенностью синхронных машин является то, что ротор должен быть раскручен к моменту присоединения машины к сети переменного тока. При этом должны выполнятся следующие условия: переменный ток, протекающий через обмотку статора, должен быть таким, чтобы его взаимодействие с магнитным полем постоянного тока создавало силу требуемого направления, иначе, вместо того чтобы поддерживать вращение, электромагнитное взаимодействие будет ему препятствовать. 65 Синхронные машины должны вращаться со строго определенной скоростью. Уменьшение скорости хотя бы на 1% приводит к тому, что изменения тока в обмотке переменного тока перестают соответствовать изменениям в положении обмотки постоянного тока, они как бы выпадают из такта, машина выпадает из синхронизма: обмотка постоянного тока подвергается усилиям, направленным то в одну, то в другую сторону, и машина останавливается. Постоянный ток, создающий магнитное поле в синхронной машине, называют током возбуждения. Чем больше ток возбуждения, тем больше напряжение, наводимое в машине. П р и м е р . Определить мощность, подводимую к трехфазному асинхронному двигателю с фазным ротором, а также ток в обмотках статора при их соединении звездой и треугольником. Номинальные параметры двигателя: полезная мощность на валу P2 = 30 кВт, напряжение на статоре U 1 = U Δ В, η = 88 %, cos ϕ = 0,85. = 220 UY 380 Решение. Активная мощность, потребляемая двигателем, равна: P P1 = 2 = 34,1 кВт. η полная мощность: S= P1 = 40,1 кВ·А. cos ϕ При соединении обмоток звездой: I= S = 61 А, 3U Y I= S = 61 А. 3 ⋅U Δ при соединении треугольником: П р и м е р . Для привода лифта использован трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети с частотой напряжения f1 = 50 Гц (рис.5.17), с числом пар полюсов p = 1 и частотой вращения ротора n2 = 0,96n1 . Определить частоту вращения n1 и Ω1 вращающегося магнитного поля, скольжение s ротора, частоту f 2 пуск тока в роторе при пуске и в рабочем режиме f 2' , а также частоту вращения ротора n2' , частоту тока f 2' в роторе при возрастании нагрузки на валу двигателя, с учетом того, что частота вращения ротора n2' при этом уменьшилась на 5% и составляет 0,95n2 . ~380 B QF ||||||||||||||||| FU ||||||||||||||||| 66 Рис.5.17. Трехфазный асинхронный электродвигатель с короткозамкнутым ротором, питающийся от трехфазной сети. 67 Решение. Частота вращения магнитного поля (синхронная частота вращения) при числе пар полюсов p = 1 : n1 = 60 f1 60 ⋅ 50 = = 3000 об/мин. p 1 Угловая частота вращения магнитного поля: πn 3,14 ⋅ 3000 Ω1 = 1 = = 314 рад/с. 30 30 Скольжение ротора двигателя: n −n 3000 − 2880 120 = = 0,04 . s= 1 2 = n1 3000 3000 Частота вращения ротора двигателя: n2 = 0,96n1 = 0,96 ⋅ 3000 = 2880 об/мин, [n2 = n1 ⋅ (1 − s )] . Частота тока в роторе двигателя при пуске ( n2 пуск = 0, s пуск = 1) : f 2 пуск = f1 s = 50 ⋅1 = 50 Гц. Частота тока ротора при частоте вращения двигателя: n2 = f1 s = 50 ⋅ 0,04 = 2 Гц. f 2' Частота вращения ротора при возросшей нагрузке на валу двигателя: n2' = 0,95n2 = 0,95 ⋅ 2880 = 2736 об/мин. Скольжение ротора при возросшей нагрузке: s' = n1 − n2' 3000 − 2736 = = 0,088 . n1 3000 Частота тока ротора при возросшей нагрузке: f 2'' = f1's = 50 ⋅ 0,088 = 4,4 Гц. П р и м е р . Для пуска восьмиполюсного асинхронного двигателя с фазным ротором и номинальными параметрами: nном = 720 об/мин; M кр = 1,8 ⋅ M ном и R я = 0,2 Ом используется пусковой реостат. Определить сопротивление Rп фазы пускового реостата, чтобы при пуске двигатель развивал максимальный момент, если частота напряжения сети f1 = 50 Гц. Решение. Номинальное скольжение определяется по формулам: 60 f1 n2 = n1 (1 − s ) , n1 = , p согласно которым 60 ⋅ 50 = 750 об/мин 8 750 − 720 и s ном = = 4% . 750 n1 = Критическое скольжение равно: ⎛ M кр s кр = s ном ⎜⎜ ⎝ M ном ( ) M кр ⎞ ⎟⎟ + − 1 = 4 ⋅ 1,8 + 0,8 % . M ном ⎠ Пусковое сопротивление определяется из соотношения: 68 s ном Rя , = s кр R я + Rп отсюда: ⎛ s кр ⎞ ⎛ 10,8 ⎞ − 1⎟ = 0,34 Ом. − 1⎟⎟ = 0,2 ⋅ ⎜ Rп = R я ⋅ ⎜⎜ ⎝ 4 ⎠ ⎠ ⎝ sп П р и м е р . Асинхронный двигатель с короткозамкнутым ротором имеет следующие паспортные данные: U ном = U Δ = 220 В, P2 ном = 40 кВт, n2 = 980 об/мин, η = 91,5 %, UY 380 cosϕ = 0,91 . Кратность пускового тока k1 = 5 , частота напряжения питания f1 = 50 Гц. Определить число пар полюсов, номинальный и пусковой токи двигателя при соединении обмоток статора в треугольник и звезду. Решение. Ближайшая стандартная синхронная частота n1 = 1000 об/мин, следовательно, 60 f число пар полюсов p = = 3 , т.е. машина шестиполюсная. n1 Скольжение равно: s= n1 − n2 ⋅100 % = 2 % , n1 мощность, потребления двигателя: P1 = P2 η = 43,7 кВт, номинальный момент: M ном = 9,55 = 389,8 Н·м. n2 При соединении обмоток треугольником номинальный ток: P1 = 126,3 А, I ф ном = 3U ф ⋅ cos ϕ пусковой ток: I n = 5 I ф ном = 629,5 А. При соединении обмоток звездой: Iф = P1 3U ном cos ϕ = 73 А, пусковой ток: I п = k1 ⋅ I ф = 365 А, т.е. пусковой ток в этом случае в 3 раз меньше. П р и м е р . Синхронный шестиполюсный двигатель имеет следующие номинальные данные: Pном = 73 кВт, nном = 1000 об/мин, U ном = 660 В, I ном = 125 А, x = 1 Ом. Определить номинальный и максимальный моменты двигателя, если ЭДС двигателя равна 670 В. Построить угловую характеристику двигателя. Решение. Номинальный момент определяется по формуле: 69 M ном = Pном ⋅ 9,55 = 6,97 кН ⋅ м . nном Максимальный момент при sin θ = 1 равен: M мах = 3 ⋅ E0 ⋅ U ⋅ 9,55 . n2 ⋅ x Подставляя исходные данные, получаем: 3 ⋅ 670 ⋅ 660 ⋅ 9,55 M = = 12,7 кН ⋅ м . 1000 ⋅1 Исходная зависимость для угловой характеристики имеет вид M = 12,7 sin θ . Например, при номинальном моменте M = M ном ⋅ sin θ = 0,55 и θ = 33,3 . § 5.7.3. Электропривод В современном автоматизированном производстве технологические процессы совершаются электромеханическими системами, состоящими из трех существенно различных частей: машины – двигателя, передаточного механизма и рабочей машины. Первые две части: двигатель с системой управления и передаточный механизм (шкивы, муфты, редукторы) служат для передачи мощности и движения рабочей машине и объединяются под общим названием – привод. Если в качестве двигателя используется электродвигатель, то привод называется электроприводом. Кроме основных частей электропривода электродвигателя и передаточного механизма большая роль в его работе принадлежит аппаратуре управления (реле, контакторы) и преобразовательным устройствам (ионные преобразователи, преобразователи частоты). Существует три основных типа электропривода: 1. Групповой (трансмиссионный), когда группа исполнительных механизмов приводится от одной или нескольких трансмиссий, которые вращает один двигатель. Этот тип электропривода неэкономичен и сегодня применяется редко. 2. В одиночном электроприводе один электродвигатель приводит в движение отдельную машину и исполнительный механизм, например металлорежущий станок. Отдельные механизмы этого станка приводятся от этого же двигателя через систему механических передач. 3. Многодвигательный электропривод характеризуется тем, что каждый отдельный механизм рабочей машины приводится своим электродвигателем. § 5.8. Вопросы для самопроверки 1. 2. 3. 4. Объясните назначение трансформатора. Как устроен трансформатор, каков принцип действия однофазного трансформатора? Что называется коэффициентом трансформации и как его определить? Почему при увеличении нагрузки трансформатора увеличивается ток в его первичной обмотке? 5. В чем отличие реального трансформатора от идеализированного? 6. Назначение схемы замещения трансформатора. 7. Какова природа потерь в трансформаторе? 70 8. С какой целью и при каких испытаниях трансформатора проводят опыты холостого хода, короткого замыкания? 9. Какое влияние оказывает характер нагрузки на внешнюю характеристику трансформатора? 10. Что такое коэффициент загрузки и КПД трансформатора? 11. Область применения измерительных трансформаторов. 12. Каково устройство машин постоянного тока? 13. Как соединяется якорная обмотка с коллектором? 14. Назовите преимущества и недостатки машин постоянного тока. 15. От каких параметров зависит ЭДС машины постоянного тока? 16. От каких параметров зависит момент на валу машины постоянного тока? 17. Каково влияние реакции якоря на суммарный магнитный поток в машинах постоянного тока? 18. В чем особенности характеристик генератора постоянного тока независимого возбуждения? 19. Каковы условия самовозбуждения генератора постоянного тока с параллельным возбуждением? 20. В чем особенность внешней характеристики генератора последовательного возбуждения? 21. Каков принцип действия двигателей постоянного тока? 22. Как изменить направление вращения якоря двигателя постоянного тока? 23. Каковы способы регулирования скорости двигателя постоянного тока с последовательным возбуждением? 24. Какие потери в машинах постоянного тока относятся к переменным, а какие к постоянным потерям? 25. Как устроена асинхронная машина? 26. В чем заключается принцип действия асинхронного двигателя? 27. Что такое скольжение? Может ли скольжение асинхронного двигателя быть равным 0? 28. Что такое критическое скольжение, и от каких величин оно зависит? 29. Какими способами можно регулировать частоту вращения асинхронного двигателя? 30. В чем заключается аналогия между работой трансформатора и асинхронного двигателя? 31. В каком режиме находится асинхронный двигатель с короткозамкнутым ротором при пуске? 32. Перечислите преимущества и недостатки асинхронного двигателя с короткозамкнутым ротором. 33. Каковы преимущества и недостатки асинхронного двигателя с фазным ротором по сравнению с асинхронным двигателем с короткозамкнутым ротором. 34. В чем заключатся различие между принципом работы асинхронной и синхронной машинами? 35. Что понимают под характеристиками холостого хода и короткого замыкания синхронного генератора? 36. Как определить к.п.д. синхронного двигателя и генератора? § 5.9. Примеры тестов 71 1. Однофазный трансформатор подключен к сети переменного напряжения 220 В. Ко вторичной обмотке подключена нагрузка, рассчитанная на 50 В. Ток в первичной обмотке равен I1 = 5 А. Считая трансформатор идеализированным определить ток нагрузки I2. 2. Напряжение первичной обмотки трансформатора U 1 = 500 В. В режиме холостого хода напряжение на вторичной обмотке U 2 = 50 В. Определить число витков первичной обмотки, если число витков вторичной обмотки 40. 3. Мощность потерь в меди однофазного трансформатора при номинальном токе первичной обмотки I1н = 5 А равна 100 Вт. Определить мощность потерь в меди при нагруженном трансформаторе, если I1 = 2 А. 4. По результатам какого опыта определяют потери в магнитопроводе трансформатора? Варианты ответов: а) нагрузочный; б) короткое замыкание; в) холостой ход. 5. Указать схему генератора постоянного тока независимого возбуждения. Rн Rн Rн ОВпосл Iя Я Rр ОВ + Iя Я Я Rр Rр ОВпарал ОВ – а б в 6. Напряжение, подводимое к двигателю постоянного тока с последовательным возбуждением U = 220 В. Определить подводимую мощность P кВт, если ток якоря I я = 25 А. 7. Определить частоту вращения ротора асинхронного двигателя n2 в номинальном режиме, если число пар полюсов p = 3 , синхронная частота вращения магнитного поля n1 = 1000 , а величина скольжения s = 2 %. 8. Определить номинальный момент на валу развиваемый асинхронным двигателем, если его номинальная мощность Pном = 50 кВт, а частота вращения ротора n2 = 1900 . 72 9. На сколько процентов уменьшится пусковой момент асинхронного двигателя, если напряжение питания U1 статорной обмотки уменьшилось на 20% по сравнению с номинальным напряжением. 10. Определить суммарную мощность всех потерь синхронного двигателя его к.п.д. η = 85 %, подведенная к двигателю мощность P1 = 20 МВт. ∑P (МВт), если § 5.10 Задачи 1. Найти коэффициент трансформации, если в режиме холостого хода напряжения на вторичной обмотке трансформатора 20; 110; 330 и 1100 В. Трансформатор подключен к сети переменного напряжения 220 В. 2. Найти ЭДС первичной обмотки трансформатора с числом витков 1000, если он подключен к сети переменного напряжения частотой 400 Гц, а в магнитопроводе создается магнитный поток Фm = 1,25 ⋅10 −4 Вб. 3. Напряжение первичной обмотки трансформатора равно 6,3 кВ. Определить коэффициент трансформации, если в режиме холостого хода напряжение на выводах его вторичной обмотки 400 В. Найти число витков первичной обмотки, если число витков вторичной обмотки равно 150. 4. Какое количество витков имеют первичная и вторичная обмотки трансформатора, подключенного к сети переменного напряжения 220 В частотой 50 Гц, если в режиме холостого хода напряжение на вторичной обмотке 110 В, а магнитный поток в магнитопроводе Фmax = 2 ⋅10 −3 Вб? 5. Двигатель параллельного возбуждения с частотой вращения 3000 об/мин подсоединен к сети напряжением 220 В. Чему равны электромагнитные момент и мощность двигателя, если сопротивления обмоток Rн = 0,05 Ом и Rв = 60 Ом? Номинальная мощность Pном = 32 кВт и КПД η = 0,87 . 6. Определить сопротивление цепи якоря R я электродвигателя постоянного тока параллельного возбуждения при условии, что при номинальном токе якоря I я ном = 100 А номинальная частота вращения nном = 800 об/мин, а при токе якоря I я = 50 А электродвигатель имеет частоту вращения n = 200 об/мин. 7. Двигатель последовательного возбуждения имеет следующие номинальные параметры: U ном = 220 В, I я = 0,02 А, nном = 1000 об/мин, I я ном = 500 А. Определить частоту вращения двигателя при M = (0,8; 1,2 и 1,5) ⋅ M ном и напряжении 200 В. 8. Для торможения двигателя последовательного возбуждения с параметрами U ном = 220 В, R я ном = 0,02 Ом, n ном = 1000 об/мин, I я ном = 500 А был использован режим противовключения. Определить сопротивление реостата, который необходимо включить в цепь якоря, чтобы при моменте M = 1,5M ном получить частоту вращения n = 200 об/мин. 9. При увеличении частоты вращения приводного вала генератора в 1,5 раза ЭДС возросла на 120 В. Определить ЭДС в обоих режимах при неизменном магнитном потоке. 10. Найти ток якоря генератора независимого возбуждения с сопротивлением цепи якоря 1 Ом и номинальной ЭДС 230 В при сопротивлении цепи потребителя 10 Ом. Построить внешнюю характеристику генератора при изменении режима холостого хода до указанного сопротивления потребителя, считая ее линейной. 73 11. Ротор асинхронного двигателя вращается с частотой 1440 об/мин, причем от сети потребляется мощность 55 кВт. Чему равны мощность на валу двигателя и развиваемый им момент, если мощность потерь в двигателе составляет 5 кВт? 12. Определить пусковой M пуск и максимальный M max моменты, а также пусковой ток I1 пуск асинхронного электродвигателя при напряжении на его зажимах, пониженном на 20% от номинального линейного напряжения U 1 ном = 380 В. Номинальная мощность двигателя P2 ном = 13 кВт, номинальная частота вращения n2 ном = 1450 об/мин, кратность пускового M пуск M ном = 1,3 и максимального номинальном напряжении M мах = 2 моментов, кратность пускового тока при M ном I1 пуск I1 ном = 7 , номинальные значения: КПД η ном = 0,855 и коэффициент мощности cos ϕ1 ном = 0,88 . 13. Определить вращающий момент асинхронного двигателя, у которого мощность на валу P2 = 7 кВт, в число оборотов ротора n2 = 1450 об/мин. 74 Модуль 6. Анализ цепей при несинусоидальных периодических воздействиях. Переходные процессы. Электронные устройства § 6.1. График выполнения задания Модуля 6 № недели Аудиторные занятия Самостоятельная работа 1 Лекция. Обзор теоретического материала модуля 6. Изучение теоретического материала, вопросы 1 – 2. Выполнение 1 пункта задания. 2 Практическое занятие. Выдача задания, решение задач по темам модуля. 3 Физический эксперимент Экспериментальное определение исходных данных для выполнения следующих пунктов задания. 4 5 Компьютерное моделирование Анализ и проверка выполненных пунктов задания. Прием задания, допуск к тестированию. Сдача задания, тестирование. Изучение теоретического материала, вопросы 3 – 5. Выполнение 2 пункта задания. Подготовка к физическому эксперименту Изучение теоретического материала, вопросы 6 – 7. Выполнение пунктов 3 - 6 задания. Подготовка к компьютерному моделированию. Изучение теоретического материала, вопросы 8 – 9. Выполнение 7, 8 пункта задания. Подготовка к тестированию. § 6.2. Теоретические вопросы Модуля 6 1. Причины возникновения переходных процессов. Законы коммутации. 2. Классический метод расчета переходных процессов. 3. Спектральное представление периодических несинусоидальных электрических величин. Действующее значение несинусоидального тока. 4. Анализ электрических цепей с несинусоидальным напряжением и токами. 5. Четырёхполюсники, электрические фильтры. 6. Электронные приборы. Характеристики, параметры, назначение. 7. Полупроводниковые устройства: выпрямители, стабилизаторы, усилители, генераторы. 8. Интегральные микросхемы. Цифровые электронные устройства. 9. Устройства на операционных усилителях. 75 § 6.3. Задание Модуля 6 Цель задания: Изучение электронных устройств, переходных процессов в линейных электрических цепях, приобретение навыков анализа цепей при несинусоидальных периодических воздействиях. Исходные данные: каждому студенту преподаватель выдает вариант задания, номер которого обозначается числом из двух цифр. Первая цифра варианта указывает номер столбца в табл.6.1, в которой приводятся параметры интегрирующего звена; Вторая цифра соответствует номеру столбца в табл.6.2, где указаны номер гармоники, частоту которой требуется рассчитать. Содержание и порядок выполнения задания: 1. Получить вариант задания у преподавателя на обзорной лекции. 2. На установочном практическом занятии согласовать пакет задач для самостоятельного решения. 3. Экспериментально в лаборатории кафедры исследовать интегрирующее звено (рис.6.1.) при воздействии последовательности прямоугольных импульсов напряжения. Считать момент подачи входного импульса началом переходного процесса. При заданном, согласно варианту значении ёмкости С опытным путём определить величину сопротивления R, обеспечивающую треугольную форму напряжения на выходе интегрирующего звена (см. Методические указания к выполнению лабораторного исследования). 4. Используя экспериментально найденное значение сопротивления R, рассчитать постоянную времени интегрирующей цепи τ. 5. Аналитически разложить в ряд Фурье кривые напряжения uвх (t ) и uвых (t ) и рассчитать их действующие значения. 6. Рассчитать коэффициент передачи K i на заданной, согласно варианту гармонике. 7. Методом компьютерного моделирования исследовать активный дифференциатор (рис.6.2) при воздействии последовательности треугольных импульсов напряжения. При найденном в физическом эксперименте сопротивлении R подобрать величину ёмкости конденсатора C, чтобы на выходе дифференциатора получился сигнал прямоугольной формы (см. методические указания к компьютерному моделированию). 8. Рассчитать постоянную времени дифференцирующей цепи τ и сравнить со значением, найденном в п. 4. § 6.4. Схемы к Модулю 6 R C uВХ Рис. 6.1. Интегрирующее звено Таблица 6.1 76 uВЫХ № строки 1 2 3 4 5 6 7 8 9 C, мкФ 60 50 40 30 20 16 8 12 6 R, кОм Таблица 6.2 № строки 1 2 3 4 5 № гармоники 3 0 2 5 1 C R uВХ uВЫХ Рис.6.2. Дифференцирующее звено § 6.5. Методические указания к лабораторному исследованию задания Модуля 6 Цель исследования: изучение возможности формирования треугольного импульса на выходе интегрирующей R-C цепи при прямоугольной форме входного сигнала, приобретение навыков применения электронного осциллографа для анализа периодических несинусоидальных процессов в электрических цепях, получение дополнительных исходных данных для выполнения задания. Подготовка к экспериментальному исследованию: 1. Изучить теоретические вопросы: • Причины возникновения переходного процесса; • Законы коммутации; • Классический метод расчёта переходных процессов. 2. Подготовить бланк протокола лабораторного исследования. Он должен содержать схему электрической цепи, формулы для расчёта постоянной времени интегрирующей цепи τ и коэффициента передачи k. Описание лабораторной установки Экспериментальная установка собирается на стенде, где расположены: генератор прямоугольных импульсов, следующих с частотой 50 Гц, батарея конденсаторов, магазина сопротивлений МСР-60М, осциллограф, соединительные провода. Для проведения эксперимента осциллограф синхронизируется синхроимпульсами с выхода СИ генератора по положительному фронту напряжения, форма которого приведена на рис.6.3. 77 Генератор импульсов R a uВХ Выход C uВЫХ Вход b PS Выход СИ Синхр. Рис.6.3. Схема экспериментальной установки uвх t Рис.6.4. Входное напряжение Содержание лабораторного исследования: 1. Исследовать переходный процесс в пассивном интегрирующем звене и влияние величин сопротивлений на форму кривой напряжения на емкости. 2. С помощью осциллографа определить амплитуду и период последовательности импульсов на выходе и входе интегрирующего звена. Выполнение лабораторного исследования: 1. Познакомится с оборудование и подключением осциллографа. 2. Включить генератор прямоугольных импульсов и подключить к его выходу (клеммы «а», «в» рис.6.3) осциллограф. Включить напряжение питания осциллографа, нажав кнопку «сеть» на передней панели прибора. Настроить осциллограф так, чтобы на экране было видно два периода напряжения генератора (рис.6.4). 3. Зарисовать на кальку осциллограмму напряжения генератора. 4. Провести оси напряжений и времени с учетом предположения, что переходный процесс начинается в момент подачи прямоугольного импульса (рис.6.4). 5. По осциллограмме определить амплитуду и период входного напряжения. 6. Собрать схему электрической цепи (рис.6.1). 78 7. Подключить вход осциллограф к конденсатору, выставить емкость согласно варианту. Изменяя величину сопротивления переменного резистора добиться того, чтобы форма переходного напряжения на емкости получилось максимально приближенной к треугольной. 8. Зарисовать на кальку осциллограмму напряжения на емкости и определить амплитуду и период выходного напряжения. 9. Записать величину сопротивления, соответствующую треугольному импульсу. § 6.6. Методические указания к компьютерному моделированию задания Модуля 6 Содержание компьютерного эксперимента: Компьютерное моделирование позволяет выполнить операцию дифференцирования входного сигнала, с использованием схем с реактивными элементами. Чтобы на выходе получить напряжение, соизмеримое с входным, обычно, напряжение усиливают при помощи операционного усилителя. Исследуемая модель (рис.6.5) содержит функциональный генератор (XFG1), активный дифференциатор (U1, C1, R1), осциллограф (XSC1). рис.6.5. Схема компьютерного исследования Выполнение компьютерного моделирования: 1. Элементы в электронных библиотеках, задействованные в моделировании: • библиотека Analog – идеальный трёхвыводной операционный усилитель • библиотека Basic – резистор • библиотека инструменты – (Function Generator) функциональный генератор • библиотека инструменты – (Oscilloscope) осциллограф , конденсатор 79 ; . . . 2. Собрать виртуальную электрическую схему согласно рис.6.5 активного дифференциатора. 3. Выставить выходные параметры функционального генератора : частоту (100 Гц − 10кГц ), скважность (1 − 99 %) и амплитудное значение (1 − 10 В) . 4. При найденной величине резистора (R, Ом) в лабораторном исследовании, подобрать величину конденсатора (С, мкФ), чтобы обеспечить прямоугольную форму напряжения на выходе дифференциатора. 5. Амплитуду и форму выходного импульса наблюдать на канале B осциллографа, причем величина выходного импульса должна быть соизмерима с входным. § 6.7. Краткая теория и примеры § 6.7.1. Переходные процессы в электрических цепях Электромагнитные процессы в электрических цепях, происходящие при переходе от одного установившегося режима работы цепи к другому, отличному от предыдущего, называются переходными процессами. Они возникают в результате коммутации, а также при изменении параметров цепи, содержащей индуктивные и емкостные элементы. Переходные процессы длятся доли секунд, однако токи и напряжения в это время могут достигать значений во много раз больших, чем при установившемся режиме. Это может привести к повреждениям отдельных участков цепи. Поэтому расчет переходных процессов имеет важное практическое значение. Законы коммутации Отсчет времени при анализе переходных процессов принято начинать от момента коммутации, в момент времени t = 0 . Первый закон коммутации: ток через индуктивность не может измениться скачком: iL ( 0 − ) = iL ( 0 + ) , где t (0 − ) – время непосредственно до коммутации; t (0+ ) – время непосредственно после коммутации. Второй закон коммутации: напряжение на емкости не может измениться скачком: uC ( 0 − ) = uC ( 0 + ) . Расчет переходных процессов в электрических цепях классическим методом 1. Составляют систему дифференциальных уравнений по законам Кирхгофа. 2. Записывают общее решение дифференциального уравнения в виде суммы частного решения неоднородного уравнения – установившийся (принужденный) режим и общего решения однородного уравнения – свободный процесс i(t ) = iпр (t ) + iсв (t ) или u (t ) = uпр (t ) + uсв (t ) . 80 3. Рассчитывают принужденные (установившиеся) составляющие токов и напряжений от действия внешних источников ЭДС и источников тока. 4. При определении вида свободной составляющей переходных токов и напряжений составляют и решают характеристическое уравнение. Для этого записывают комплексное сопротивление цепи Z вх , заменяют jω на p и приравнивают Z ( p ) к нулю. Решая уравнение Z ( p ) = 0 , находят корни характеристического уравнения p . При одном корне свободные составляющие тока и напряжения имеет вид: iсв ( t ) = A ⋅ e pt , uсв ( t ) = A ⋅ e pt . 5. Определяют постоянную интегрирования A из начальных условий, т.е. при t = 0 . i (0) = iпр (0) + iсв (0) , iсв (0) = A ; u (0) = uпр (0) + uсв (0) , uсв (0) = A . Следует помнить, что корень характеристического уравнения p всегда отрицателен, т.к. свободный процесс – процесс затухающий, он обусловлен запасом энергии в реактивных элементах электрической цепи. 1 При анализе переходных процессов вводят понятие постоянной времени цепи τ = . p П р и м е р . Последовательная R − L цепь подключается к источнику постоянной ЭДС E = 10 В (рис.6.6), R = 5 Ом, L = 10 мГн. Определить i (t ) и u L (t ) . R L E Рис.6.6. Решение. Цепь содержит один реактивный элемент и описывается дифференциальным уравнением первой степени: di E = Ri + L . dt Решение уравнения имеет вид i (t ) = iпр (t ) + iсв (t ) . Находим iпр (t ) . В установившемся режиме индуктивность не оказывает сопротивления постоянному току, следовательно E 10 = 2 А. iпр = = R 5 Составляем характеристическое уравнение и находим его корень: Z вх = R + jωL , jω ⇒ p, Z ( p) = R + pL = 0 , p=− R 5 ⋅103 =− = −500 . L 10 Тогда iсв (t ) = A ⋅ e −500t . 81 Определяем A из начальных условий: i (0) = iпр (0) + Ae −500t . По первому закону коммутации: iL ( 0 − ) = iL ( 0 + ) = 0 , тогда при t = 0 + : 0= E + A, R отсюда A=− E 10 = − = −2 . R 5 Ток в цепи i(t ) = 2 ⋅ (1 − e −500t ) (рис.6.7). i iпр(t) 2 i(t) t iсв(t) -2 Рис.6.7. Напряжение на индуктивности u L = L di = E ⋅ e −500t = 10 ⋅ e −500t (рис.6.8). dt uL(t) 10 t Рис.6.8. П р и м е р . Используя условие предыдущей задачи определить время t1 через которое ток в цепи достигнет значения i (t1 ) = 0,5 ⋅ iпр . Решение. i (t1 ) = iпр (t ) + Ae −500t , i (t1 ) = 0,5 ⋅ iпр (t ) = 1 А; 1 = 2 − 2 ⋅ e −500t , 0,5 = e −500t , ln 0,5 = −500t1 ln e , t1 = − ln 0,5 = 1,39 ⋅10−3 с. 500 ⋅ ln e П р и м е р . Определить постоянную времени цепи (рис.6.9). 82 С R U R Рис.6.9. Решение. Составляем характеристическое уравнение Z ( p) = 1 R + , приравниваем Z ( p ) к pC 2 нулю и находим корень характеристического уравнения: 2 1 R Z ( p) = + =0 → p=− . pC 2 RC Постоянная времени τ = RC 1 , следовательно, τ = . p 2 § 6.7.2. Периодические несинусоидальные сигналы В цепях электросвязи, электронных и полупроводниковых устройств используются периодические несинусоидальные токи и напряжения, т.е. сигналы, изменяющиеся во времени по периодическому несинусоидальному закону (рис.6.10). Рис.6.10. Несинусоидальные сигналы. Из математики известно, что несинусоидальная периодическая функция может быть представлена в виде гармонического ряда Фурье: ∞ f (t ) = A0 + ∑ Ak sin(kωt ) + Bk cos(kωt ) , k =1 где A0 = Ak = Bk = 1 π 1 π 1 2π 2π ∫ f (t )dt – постоянная составляющая, 0 2π ∫ f (t ) sin(kωt )dt – амплитуда синусоидальной составляющей k - ой гармоники, 0 2π ∫ f (t ) cos(kωt )dt – амплитуда косинусной составляющей k - ой гармоники. 0 Существует вторая форма записи ряда Фурье: ∞ f (t ) = A0 + ∑ Ck sin(kωt + α k ) , k =1 83 ⎛B ⎞ Ak2 + Bk2 , α k = arctg ⎜⎜ k ⎟⎟ . ⎝ Ak ⎠ Гармоника, частота которой равна частоте несинусоидальной периодической функции, называется основной. Остальные гармоники – высшие. Действующее значение несинусоидальных токов и напряжений – это величины, измеряемые амперметром и вольтметром. Действующее значение периодической функции тока и напряжения, представленной рядом Фурье, определяется через действующие значения всех гармоник: где Ck = I = I 02 + I12 + I 22 + … + I k2 , U = U 02 + U12 + U 22 + … + U k2 . П р и м е р . Напряжение источника ЭДС задано в виде ряда Фурье: u (t ) = 6 + 8 2 sin(ωt + 30 ) + 7,07 sin(3ωt − 60 ) В. Вольтметр электромагнитной системы, подключенный к источнику, покажет действующее значение напряжения: 2 ⎛ 7,07 ⎞ U = 6 +8 +⎜ ⎟ = 11,18 В. ⎝ 2 ⎠ 2 2 Мощность в линейных электрических цепях с негармоническими напряжениями и токами Активная мощность несинусоидального периодического тока равна сумме активных мощностей постоянной составляющей и всех гармоник: n P = U 0 I 0 + ∑U k I k cos ϕ k , k =1 где ϕ k = β k − α k . Реактивная мощность определяется как сумма реактивных мощностей отдельных гармоник: n Q = ∑U k I k sin ϕ k , k =1 причем, реактивная мощность от постоянной составляющей тока и напряжения равна нулю Q0 = 0 . Полная мощность равна произведению действующих значений несинусоидального напряжения и тока S = UI . Расчет линейной цепи с несинусоидальными сигналами Расчет линейной цепи с несинусоидальными сигналами базируется на принципе наложения, согласно которому он проводится для каждой из гармонических составляющих в отдельности. 1. Заданные несинусоидальные токи, напряжения, ЭДС представляются гармоническим рядом. 84 2. Рассчитывают цепь последовательно от действия нулевой, первой и других гармоник, проверяя правильность расчета для каждой из гармоник подсчетом баланса мощностей, при 1 . этом xL( k ) = kωL , xC( k ) = kωC 3. Записывают результат в виде суммы мгновенных значений всех составляющих (в виде гармонического ряда). П р и м е р . Электрическая цепь состоит из последовательно соединенных сопротивления R = 30 Ом, индуктивности L = 0,159 Гн и конденсатора С = 7,08 мкФ. Цепь питается от источника напряжения: u (t ) = 400 sin(ωt − 30 ) + 120 sin 3ωt + 50 sin(5ωt + 20 ) В. Частота первой гармоники f = 50 Гц. Найти мгновенное значение тока в цепи. Решение. Расчет цепи производим символическим методом отдельно для каждой гармоники тока. Комплексные амплитуды напряжения гармоник: ( 3) (1) ( 5) U m = 400e − j 30 В; U m = 120 В; U m = 50e j 20 В. Определяем сопротивления цепи токам 1, 3 и 5-й гармоник: 1 106 = = 450 Ом. ω = 2πf1 = 314 c ; ωL = 314 ⋅ 0,159 = 50 Ом; ωC 314 ⋅ 7,08 −1 1 = 30 + j 50 − j 450 ≈ 400e − j 87 ,5 Ом; ωC 1 450 ( 3) Z = R + j 3ωL − j = 30 + j 3 ⋅ 50 − j = 30 Ом; 3ωC 3 1 450 ( 5) Z = R + j 5ωL − j = 30 + j 5 ⋅ 50 − j ≈ 162e 79, 4 Ом. 5ωC 5 Расчет тока для первой гармоники: Z (1) = R + jω L − j (1) (1) Im = Um 400e − j 30 = = 1e j 55,7 A, ⇒ i1 (t ) = 1sin(ωt + 55,7 ) А; (1) − j 85, 7 400 e Z Расчет тока для третьей гармоники: ( 3) Im = ( 3) Um 120 = = 4 A, ⇒ i3 (t ) = 4 sin 3ωt А. ( 3) 30 Z Расчет тока для пятой гармоники: ( 5) Im = ( 5) Um 50e j 20 = = 0,308e − j 59, 4 A, ⇒ i5 (t ) = 0,308 sin(5ωt − 59,4 ) А. ( 5) 162e j 79, 4 Z Мгновенное значение несинусоидального тока в цепи i (t ) = 1sin(ωt + 55,7 ) + 4 sin 3ωt + 0,308 sin(5ωt − 59,4 ) А. § 6.7.3. Электроника Электроникой называется область технической науки, изучающая принципы действия и применение электронных приборов, которые выполняют в электрических цепях различной сложности преобразования сигнала. Работа электронных приборов основана на электрических процессах происходящих в вакууме, газах, и полупроводниковых материалах. Управление этими процессами происходит с помощью электрических и магнитных полей, температуры и 85 освещенности. В соответствии с этим электронные приборы подразделяются на электровакуумные, полупроводниковые, фотоэлектронные, квантовые, газоразрядные приборы и т.д. Электронные приборы Наиболее распространенным электровакуумным прибором является электронно-лучевая трубка, она остается основным узлом осциллографов, телевизионных экранов, дисплеев, мониторов и т.д. Конструкция любого электровакуумного прибора представляет собой помещенные внутри баллона (газонепроницаемой оболочки) электроды. Электродом называется проводник, эмитирующий (испускающий) – катод; или собирающий электроны (ионы) – анод; либо управляющий их движением от электрода к электроду с помощью электрического поля. Основные электровакуумные приборы Электронноуправляемая лампа Количество электродов Электровакуумный диод 2 – анод и катод Триод 3 – анод, катод, сетка Тетрод 4 Пентод 5 – анод, катод, управляющий электрод, экранирующая и защитная сетки Область применения выпрямление переменного тока промышленной частоты в цепях высокого напряжения усилители высокой частоты, генераторы, мощные усилители и стабилизаторы напряжения усилители и генераторы Низкочастотные и высокочастотные усилители, усилители с переменной крутизной (переменным коэффициентом усиления) и генераторы. Лампы с большим количеством электродов выполняют специальные функции и часто имеют двойное управление электронным потоком. К таким приборам можно отнести гептод пятисеточную лампу, предназначенную для преобразования частоты. Аналогичные функции преобразования сигнала выполняют полупроводниковые приборы. Их преимущества по сравнению с лампами это – технологичность, миниатюрность, дешевизна. К недостаткам следует отнести – меньшие рабочие мощности, зависимость характеристик от внешних параметров. Работа электронных полупроводниковых приборов основана на явлении электропроводности, свойственной полупроводниковым материалам. При сплавлении двух полупроводников с различным типом проводимости, создается область раздела называемая электроно-дырочным или p-n-переходом, обладающая вентильным свойством. В отсутствии внешнего поля соблюдается равновесное состояние между диффузионным током (ток основных носителей зарядов) и током дрейфа (ток неосновных носителей заряда). Если к диоду подключить источник постоянного напряжения, плюсом к p-области, а минусом к n-области (подать прямое смещение), то равновесное состояние p-n-перехода нарушается, внешнее поле совпадает с направлением диффузионного тока, сопротивление p-nперехода уменьшается – переход открыт. Если к p-n-переходу приложить напряжение другой полярности (обратно сместить p-n-переход), то преобладать начинает ток дрейфа, сопротивление p-n-перехода возрастает, переход закрыт. Зависимость тока от напряжения на переходе (ВАХ) имеет нелинейный, несимметричный характер (рис.6.11). 86 Р-n-переходы, а также переходы между металлом и полупроводником являются основными элементами полупроводниковых приборов, количество их определяет основные функции и особенности применения прибора. Прибор с одним p-n-переходом получил название диода. ВАХ диода совпадает с ВАХ p-nперехода (рис.6.11). К основным параметрам диода относятся статическое и динамическое сопротивления: U Rст = , I dU Rд = dI Iпр, А Uобр, В Uпр, В Iобр, мкА Рис.6.11. ВАХ диода. Биполярный транзистор – это полупроводниковый прибор с двумя p-n-переходами, образованными тремя областями проводимостей p-n-p или n-p-n (рис.6.12). Рис.6.12. Структура биполярного транзистора Средняя, тонкая область транзистора называется базой (б), одна крайняя область – эмиттером (э), другая крайняя область – коллектором (к). Для транзистора выполняется первый закон Кирхгофа: iЭ = iК + iб В этом соотношении ток базы много меньше тока эмиттера и тока коллектора, поэтому: iЭ ≈ iК . Соотношения между токами в транзисторе характеризуется двумя параметрами: 87 коэффициентом передачи тока эмиттера: α= iК , iЭ β= iК iб и коэффициентом передачи тока базы: Связь между коэффициентами передачи транзистора: β= α 1−α Полупроводниковый прибор с четырехслойной структурой n-p-n-p типа и тремя переходами называется тиристором. Тиристор имеет три вывода – два от крайних областей и третий от слоя с дырочной проводимостью. Тиристоры малой мощности используются в схемах быстродействующих электронных выключателей, мощные – в схемах управляемых выпрямителей и устройствах управления электроприводом. Электронные устройства Для преобразования переменного тока в постоянный ток служат выпрямители, которые представляют собой цепи с диодами и тиристорами. Однополупериодную схему (рис.6.13. а) применяют, при выпрямленных токах до нескольких десятков миллиампер и в случаях, когда не требуется высокой степени сглаживания выпрямленного напряжения. В однополупериодных схемах выпрямление происходит в течении одного полупериода (рис.6.13 б), диод открыт только в те полупериоды, когда на нем действует положительная полуволна напряжения. Напряжение на нагрузке состоит из положительных U полуволн, его среднее значение (постоянная составляющая) равно U 0 = m (рис.6.13 в). π VD Rн uвх a) 88 uвых u i I0 0 t t 0 в) б) Рис. 6.13. Однополупериодный выпрямитель. Работа выпрямительного устройства характеризуется следующими параметрами: Коэффициент выпрямления: R K В = обр , Rпр где Rобр , Rпр – сопротивление диода в обратном и прямом включении. Коэффициент пульсации: K по = U пр U ов где U ïð – амплитуда первой гармоники, U îâ – постоянная составляющая выпрямленного напряжения. Для уменьшения пульсаций включают сглаживающие фильтры. В простейшем случае сглаживание на нагрузке достигается включением параллельно ей емкости. Для увеличения среднего напряжения на нагрузке используют двухполупериодные схемы выпрямления, содержащие два и более диодов. В мостовой схеме (рис.6.14), когда источник переменного напряжения включен в одну диагональ, а нагрузка в другую, диоды работают попарно. В первый период, когда от источника действует положительная полуволна диоды VD1 и VD3 проводят ток, а VD2 и VD4 – закрыты. Во второй полупериод диоды VD2 и VD4 открыты, а VD1 и VD3 – не пропускают ток. Ток через нагрузки протекает все время и в одном и том же направлении. VD1 VD2 Rн VD4 VD3 e(t) a) 89 Рис.6.14. Двухполупериодный выпрямитель. П р и м е р . Действующее значение входного напряжения выпрямителя, выполненного по мостовой схеме 390 В. На нагрузочном резисторе 1400 Ом постоянная составляющая выпрямленного напряжения 350 В. Найти постоянную составляющую выпрямленного тока. Определить число последовательно включенных диодов в плече мостовой схемы, если максимально допустимое обратное напряжение каждого диода 300 В. Решение. Амплитудное значение входного напряжения: U m вх = 2 ⋅ U вх ≈ 2 ⋅ 390 ≈ 550 В. Значение максимального обратного напряжения в схеме U îáð = 550 В. Постоянная составляющая выпрямленного тока: U 350 I0 = 0 = = 0,25 А. RН 1400 Число последовательно включенных диодов в плече схемы определяется отношением максимально обратного напряжения схемы к максимально допустимому напряжению диода U 550 = 1,83 . N ≥ обр = U од 300 Принимаем N=2. П р и м е р . Заданы вольт-амперная характеристика диода (рис.6.15 а), его сопротивление в проводящем прямом направлении Rпр = 5 Ом, в непроводящем (обратном) направлении Rобр = 1000 Ом, сопротивление нагрузочного резистора RН = 400 Ом и напряжение питающей сети U = 220 В. Определить средние значения выпрямленных тока I 0 и напряжения U 0 , мощность P , выделяемую в нагрузочном резисторе RН , обусловленную этим током, для однополупериодного выпрямителя, собранного на полупроводниковом диоде (рис.6.15 б). Нелинейностью характеристики пренебречь. 90 I, А i 1,5 1,0 I m′ 0,5 -U, В U, В 0 100 0 200 300 400 0 I 0′ I 0′′ 2π π u, В 100 200 VD i π Um 2π uн u t б) а) Рис.6.15. Выпрямление синусоидального тока Решение. Сопротивление электрической цепи в проводящий (прямой) полупериод: R1 = Rпр + RН = 5 + 400 = 405 Ом, в непроводящий (обратный) полупериод: R2 = Rобр + RН = 1000 + 400 = 1400 Ом. Амплитудное значение тока в цепи в проводящий полупериод: I m' = Um 2U 310,2 = = = 0,766 А, R1 R1 405 в непроводящий полупериод: I m'' = U m 310,2 = = 0,222 А. R2 1400 Постоянные составляющие прямого тока: I = ' 0 I m' = 0,766 = 0,244 А; 3,14 I m'' = 0,222 = 0,071 А. 3,14 π обратного тока: I 0'' = π Средние значения выпрямленного тока: I 0 = I 0' − I 0'' = 0,244 − 0,071 = 0,173 А; 91 Rн t I m′′ выпрямленного напряжения: U 0 = RН ⋅ I 0 = 400 ⋅ 0,173 = 69,2 В. Мощность, выделяемая в сопротивлении резистора, обусловленная постоянной составляющей выпрямленного тока: P = I 02 ⋅ RН = 0,1732 ⋅ 400 = 11,972 Вт. Напряжение или ток в электрических цепях может меняться вследствие различных причин – за счет колебаний напряжения питания, зависимости параметров элементов от температуры и т.д., что приводит к ухудшению рабочих характеристик устройств. Для стабилизации тока и напряжения применяют стабилитроны – опорные диоды, которые работают на обратной ветви вольт-амперной характеристики, а также двухкаскадные или мостовые схемы на их основе. Качество работы стабилизатора характеризуется коэффициентом стабилизации: ΔU вх ⋅ U Н K ст = ΔU Н ⋅ U вх где ΔU вх и U Н – изменение напряжения на входе и напряжения в нагрузке. Rбал Iбал Iст Iн VD Rн Uвx Рис.6.16. Схема стабилизатора. П р и м е р . Известны дифференциальное сопротивление стабилитрона Rд = 24 Ом, его ток I ст = I Н = 5 мА, а напряжения U ст = 10 В и U вх = 15 В. Определить необходимое балластное сопротивление, коэффициент стабилизации и КПД стабилизатора (рис.6.16). Решение. Так как входное напряжение: U вх = U вых + I бал ⋅ Rбал , а общий ток цепи: I бал = I ст + I Н , то искомое балластное сопротивление: U − U ст 5 R = вх = −2 = 500 Ом I ст + I Н 10 Коэффициент стабилизации определяется из соотношения: R ⋅U 5000 K ст = бал ст = = 14 Rд ⋅ U вх 24 ⋅15 КПД стабилизатора определяется как соотношение мощности, выделяемой в нагрузке, к мощности входного источника, т.е. I ⋅U 50 η = Н ст = = 0,33 I вх ⋅ U вх 150 92 П р и м е р . Для стабилизатора напряжения (рис.6.16) заданы входное напряжение 48 В и сопротивление нагрузки 50 Ом. Параметры стабилитрона U ст = 12 В и I доп = 200 мА. Определить величину необходимого балластного сопротивления. Решение. Согласно схеме, входное напряжение есть сумма напряжений на балластном сопротивлении и стабилитроне. Тогда напряжение на балластном сопротивлении: U бал = U вх − U ст = 48 − 12 = 36 В. Напряжение на стабилитроне равно напряжению на нагрузочном сопротивлении. Ток нагрузочного сопротивления: U 12 I Н = ст = = 0,24 А. RН 50 Ток через балластное сопротивление: I бал = I Н + I доп = 0,24 + 0,2 = 0,44 А, тогда величина балластного напряжения: U 36 Rбал = бал = = 81,82 Ом. I бал 0,44 Усилитель – это устройство, увеличивающее мощность сигнала. Увеличение мощности происходит за счет преобразования энергии постоянного источника питания в энергию переменного сигнала. По усиливаемой электрической величине различают усилители мощности, напряжения и тока. Основными показателями усилителя являются: коэффициенты усиления по напряжению, по току, по мощности: U P I K u = вых , K i = вых , K P = вых = K u ⋅ K i , I вх U вх Pвх а также входное и выходное сопротивления. В усилителях, схема включения транзистора представляет собой четырехполюсник, т.е. схему, имеющую две пары входных зажимов (1 – 1) для присоединения источника сигнала и две пары выходных зажимов (2 – 2) для подключения нагрузки (рис.6.17). uвх uвых K Рис.6.17. Структурная схема четырехполюсника. Различают три схемы включения транзистора: с общей базой (ОБ), с общим эмиттером (ОЭ) и общим коллектором (ОК) (рис.6.18). 93 а) iвх = iэ ik = iвых VT uвх = uэ-б uэ-б iб Rн uвых б) в) Рис.6.18. Схемы включения транзистора а) ОЭ, б) ОБ, в) ОК В схеме с ОЭ осуществляется усиление по току, напряжению и мощности. При этом выходное напряжение u К −Э находится в противофазе с входным напряжением uэ−б . Ki = Ku = I вых I К α = = = β >1 I вх Iб 1 − α U вых I К ⋅ RН R = =α⋅ Н U вх I б ⋅ Rвх RЭ−б >1 α 2 RН K P = Ki ⋅ Ku = ⋅ >1 1 − α Rэ−б В схеме с ОБ отсутствует усиление по току. Выходное напряжение U к −б совпадает по фазе с входным напряжением U э−б . 94 Ki = Ku = I вых I К = =α <1 I вх IЭ U вых I К ⋅ RН R = =α⋅ Н U вх I Э ⋅ Rвх RЭ−б K P = Ki ⋅ Ku = α 2 ⋅ >1 RН >1 Rэ−б Зависимости коллекторного тока от управляющего тока базы или эмиттера в этих схемах определяется соотношениями: I К = β ( I б + I К 0 ), I K = α ⋅ I Э + I K 0 , где: I K 0 – обратный ток p-n-перехода база-коллектор при токе I Э равным нулю. В схеме с ОК не происходит усиление по напряжению. При этом выходное напряжение совпадает по фазе со входным. I I I +I α α K i = вых = Э = K б = β + 1 = +1 = >1 I вх Iб Iб 1−α 1−α Ku = U вых U вых I Э ⋅ RН RН = = = U вх U вых + U Э−б I Э ⋅ ( RН + RЭ−б ) RН + RЭ−б ≤1 1 >1 1−α Свойства транзистора в зависимости от схемы включения оцениваются его статическими входными и выходными характеристиками. Входные характеристики – это зависимость входного тока от входного напряжения при постоянном выходном смещении. Так как входной переход транзистора в усилительном режиме смещен прямо, то они аналогичны прямой ветви ВАХ p-n-перехода. Выходные характеристики представляют собой зависимость выходного тока от выходного напряжения при постоянном входном токе и аналогичны обратной ветви ВАХ pn-перехода. На рис.6.19 представлен вид статических характеристик для схемы с ОЭ. Для каждого, выпускаемого промышленностью типа транзистора, статические характеристики заданы в справочнике по полупроводниковым приборам или снимаются экспериментально. K P = Ki ⋅ Ku ≅ Ki = β + 1 = Iб Uк = − 2 В Uк = 0 Uк = − 5 В Uб 0 а) 95 Iк I б'' = const I б = const I б' = const Uк 0 б) Рис.6.19. Статические характеристики биполярного транзистора включенного по схеме с ОЭ (а – входные, б – выходные). Нелинейность характеристик транзистора приводит к появлению нелинейных искажений – искажений формы усиливаемого сигнала. Для уменьшения искажений в усилителях используется обратная связь. Выходной сигнал в виде напряжения или тока через цепь обратной связи частично или полностью поступает на вход рис.6.20. В качестве обратной связи используют пассивные цепи. вход К выход β Рис. 6.20. Структурная схема усилителя с ОС Различают положительную обратную связь, когда сигнал обратной связи складывается с входным сигналом и отрицательную обратную связь, при которой сигналы вычитаются. В первом случае коэффициент передачи начинает возрастать – происходит возбуждение усилителя. В случае отрицательной обратной связи коэффициент усиления усилителя уменьшается. Для усилителя, охваченного обратной связью, коэффициент усиления: К К ос = 1 + К ⋅ β ос где: К – коэффициент усиления усилителя без обратной связи, β ос – коэффициент обратной связи, который показывает какая часть выходного сигнала поступает на вход усилителя, К ос – коэффициент усиления усилителя после введения обратной связи. В современных электронных устройствах и вычислительных машинах для преобразования сигнала применяются операционные усилители ОУ. Под ОУ принято понимать микросхему – усилитель постоянного тока, имеющий два входа и, как правило, один выход. ОУ обладает большим коэффициентом усиления по напряжению, высоким входным и низким выходным сопротивлением. 96 На рис.6.21 представлена базовая схема включения ОУ с однопетлевой обратной связью. Знаком плюс отмечен неинвертирующий вход, на который через Z 1 подается входной сигнал. Знаком минус отмечен инвертирующий вход, на который через комплексное сопротивление Z 2 подается напряжение обратной связи. Коэффициент усиления ОУ – К. Напряжение на входе ОУ U 0 = (ϕ + − ϕ − ) , на выходе ОУ U вых = K ⋅ U 0 . Рис.6.21. Схема включения ОУ с однопетлевой обратной связью Для упрощения расчета электронных схем вводят понятие линейного идеального ОУ, для которого принимают: К 0 = ∞ , Rвх = ∞ , Rвых = 0 , тогда: U0 = U вых U = 0 , I 0 = вх = 0 Rвх К0 Для усилителя (рис.6.21) по первому закону Кирхгофа: I вх = I 0 + I ос , т.к. для ОУ: I 0 = 0 , то I вх = I ос Выразив токи через соответствующие им напряжения, получим: U вх − U 0 U 0 − U вых = , z1 z2 с учетом того, что для ОУ U 0 = 0 U вых z2 = =K. U вх z1 Таким образом, величину коэффициента усиления усилителя можно регулировать величиной сопротивления обратной связи Z 2 . На основе ОУ выполняются различные преобразователи сигналов. Так, например, для изменения временных параметров импульсов, а также их формы применяются дифференцирующие и интегрирующие устройства. Для дифференциатора на идеальном ОУ (рис.6.22): 97 Рис.6.22. Схема дифференциатора на идеальном ОУ iС = i0 + iR , т.к. i0 = 0 , то: iС = iR , iC = C ⋅ − uвых duвх , iR = , dt R Поэтому: uвых = − RC duвх du = −τ вх , dt dt где τ = RC – постоянная времени цепи. Таким образом, сигнал на выходе цепи пропорционален дифференциалу входного сигнала, причем для повышения точности дифференцирования необходимо, чтобы постоянная времени цепи была как можно меньше длительности входного импульса. Для интегратора на идеальном ОУ (рис.6.23): Рис.6.23 Схема интегратора на ОУ iС = iR , iR = uвх du , iС = −C ⋅ С , dt R тогда: T uвых = 1 1 uвх dt = ∫ u вх dt ∫ R ⋅C τ 0 Таким образом, сигнал на выходе цепи пропорционален интегралу входного сигнала, причем интегрирование тем точнее, чем больше величина постоянной времени цепи по сравнению с периодом сигнала на входе. 98 На основе интеграторов выполняют генераторы линейно изменяющегося напряжения, использующиеся в качестве генератора разверток осциллографов, мониторов телевизионных систем и.д. П р и м е р . Заданы коэффициент передачи биполярного транзистора β = 50 , обратный ток коллектор- база I к 0 = 10 мкА. Найти токи I к , I Э , I б при включениях с ОБ и ОЭ, если ток коллектора одинаков в обоих случаях, а соотношение между управляющими токами I э = 55 I б . Решение. Воспользовавшись соотношениями токов в схемах с ОБ и ОЭ и соотношениями между коэффициентами передачи α и β запишем систему уравнений: ⎧ I к = 50(I б + 10 ), ⎨ ⎩ I к = 0,98 ⋅ 55 ⋅ I б + 10 . Решив систему относительно тока базы, получим I б = 0,122 мА. Ток эмиттера I э = 55 I б = 6,7 мА. Ток коллектора из системы уравнений I к = 6,6 мА. П р и м е р . На инвертирующий вход идеального операционного усилителя подается напряжение 20 мВ. Сопротивления z1 = 5 кОм, сопротивление ОС z 2 = 500 кОм, сопротивление нагрузки z н = 1 кОм (рис.6.24). Найти коэффициенты усиления операционного усилителя по току, напряжению и мощности. Рис.6.24. Схема усилителя на ОУ Решение. Коэффициент усиления по напряжению определяется соотношением сопротивления z1 и z 2 : Ku = z2 500 ⋅103 = = 100 z1 5 ⋅103 Определим выходное напряжение: U вых = K u ⋅ U вх = 100 ⋅ 20 ⋅ 10 −2 = 20 В. Тогда выходной ток: I вых = U вых 20 = 3 = 2 ⋅10 −3 А. RН 10 Входной ток: I вх = U вх 20 ⋅ 10−2 = 4 ⋅ 10− 5 А. = 5 ⋅ 103 z1 Коэффициент по току: Ki = I вых 2 ⋅10 −3 = = 50 . I вх 4 ⋅10 −5 Коэффициент по мощности: 99 K p = K u ⋅ K i = 100 ⋅ 50 = 5000 . § 6.8. Вопросы для самопроверки 1. 2. 3. 4. Дайте определение установившихся и переходных процессов в электрических цепях. Каков физический смысл постоянной времени электрической цепи? Сформулируйте законы коммутации. От чего зависит частота основной гармоники несинусоидального периодического сигнала? 5. От чего зависит форма сигнала? 6. Какие носители зарядов создают ток во внешней цепи полупроводникового диода при подключении к нему источника тока? 7. По каким параметрам выбирают диоды для выпрямителей? 8. Что определяет величину балластного сопротивления в схеме однополупериодного выпрямителя? 9. Как можно уменьшит коэффициент пульсации выпрямителя? 10. Какая из схем включения транзистора дает наибольший коэффициент усиления по мощности? 11. Какие виды обратных связей применяются в усилителях? 12. При каких условиях усилительное устройство, охваченное обратной связью, может превратиться в автогенератор? 13. От чего зависит постоянная времени цепи в дифференциаторах на ОУ? 14. От чего зависит постоянная времени цепи в интеграторах на ОУ? § 6.9. Примеры тестов 1. Определить значение тока i1 (0 + ) в момент коммутации, если R2 = R3 = 10 Ом, E = 100 В. С i1 E i2 i3 R2 R3 3. Определить значение p в выражении переходного тока i1 = i1 пр + Ae pt , если С = 0,1 Ф, R1 = R2 = 10 Ом. С E 100 i2 i3 R2 R3 4. Определить значение постоянной интегрирования A в выражении для переходного напряжения u R = u R пр + Ae pt , если E = 50 В, R = 2 Ом, L = 0,1 Гн. R L E 5. Определить действующее значение несинусоидального напряжения, представленного рядом Фурье: i (t ) = 16 cos(1000t ) − 2 cos(2000t ) . Ответ округлить до целых чисел. 6. Определить модуль полного сопротивления цепи на первой гармонике, если R = 4 Ом, а сопротивление емкости на второй гармонике xС( 2) = 1,5 Ом. R u С 7. К цепи приложено напряжение u (t ) = 100 + 300 sin(500t ) + 150 sin(1500t ) . Сопротивление R = 4 Ом, емкостное сопротивление на первой гармонике xС(1) = 9 Ом. Определить амплитуду третьей гармоники тока. С u R 8. Определить коэффициент выпрямления полупроводникового диода, если сопротивление диода в прямом включении Rпр = 10 Ом, а в обратном включении Rобр = 100 кОм. 9. Указать схему интегратора напряжения. C R R C uвх uвых uвх а) uвых б) 101 10. Определить обратный ток коллектора I К 0 (мкА) транзистора в схеме с общим эмиттером, если коэффициент передачи тока β = 50 , ток коллектора I К = 3,5 мА, а ток базы I б = 40 мкА. 11. Определить напряжение на выходе усилителя, охваченного обратной связью, если при напряжении на входе U вх = 1 В, напряжение на выходе усилителя без обратной связи 100 В, а коэффициент обратной связи K ос = 0,03 . 11.3. На линейный усилитель с заданной характеристикой коэффициента усиления по напряжению от частоты подается несинусоидальный периодический сигнал u (t ) = 8 sin(62,8t ) + 6 sin(187,8t + 0,48π ) + 3 sin(314t + 0,42π ) . Определить амплитуду напряжения первой гармоники на выходе усилителя. kU 40 30 20 10 f, Гц 0 10 20 30 40 102 50 60 f, Гц § 6.10 Задачи 1. Три диода соединены последовательно в прямом включении. Общий ток, протекающий по ним равен 0,8 мА. Найти общее падение напряжения и падение напряжения на каждом диоде, если сопротивление при этом токе первого диода равно 1,6 Ом, второго- 2,5 Ом, третьего – 1,2 Ом. 2. Два диода соединены параллельно в прямом включении. Падение напряжения на каждом них составило 2 В. Найти общий ток и ток каждого диода, если сопротивление при этом из напряжении первого диода 2,4 Ом, второго 2,2 Ом. 3. Что покажет амперметр электромагнитной системы, включенный в ветвь с мгновенным значением тока i (t ) = 4 sin ωt + 3 sin 3ωt А ? 4. Что покажет вольтметр магнитоэлектрической системы, подключенный к участку цепи с напряжением u (t ) = 40 + 30 sin(ωt + 30 ) В ? 5. Определить действующее значение тока в цепи, если 1 u (t ) = 100 + 100 2 sin ωt + 50 2 sin 2ωt В, = 20 Ом, R = 10 Ом. ωC 6. Определить действующее значение напряжения на входе цепи, если если i (t ) = 2 2 sin(ωt + 20 ) + 2 sin(3ωt − 20 ) А, R = 10 Ом, ωL = 10 Ом. i R L u 7. Определить значения токов i1(0+), i2(0+), i3(0+) в момент коммутации, если R1=10 Ом, R2 = R3 = 20 Ом, Е=100 В. R1 i1 R2 U R3 C i2 i3 8. Определить корень характеристического уравнения для переходного процесса в цепи, если R1 = 10 Ом, R2 = R3 = 20 Ом, C = 100 мкФ для схемы из задачи № 7 103 9. Чему равны значения токов i1(0+), i2(0+), i3(0+) в момент коммутации, если R1 = 10 Ом, R2 = R3 = 20 Ом, U = 100 В 10. Как измениться постоянная времени цепи τ, если замкнуть рубильник. 104 Библиографический список 1. Касаткин, А.С. Электротехника: учеб. для вузов / А.С. Касаткин, М.В. Немцов. – 9-е изд.– М.: Academia, 2005. – 639 с. 2. Касаткин, А.С. Электротехника: учеб. для вузов / А.С. Касаткин, М.В. Немцов. – 8-е изд. испр. – М.: Академия, 2003. – 639 с. 3. Касаткин, А.С. Электротехника: учеб. для вузов / А.С. Касаткин, М.В. Немцов. – 7-е изд. – М.: Высш. шк., 2003. – 542 с. 4. Касаткин, А.С. Электротехника: учеб. для неэлектротехн. спец. вузов / А.С. Касаткин, М.В. Немцов. – 6-е перераб. изд. – М.: Высш. шк., 2000. – 542 с. 5. Евдокимов, Ф.Е. Теоретические основы электротехники: учеб. для средн. проф. обр. / Ф.Е. Евдокимов – М.: Academia, 2004. – 560 c. 6. Данилов, И.А. Общая электротехника с основами электроники / И.А. Данилов –М.: Высш .шк., 2000. – 752 с. 7. Электротехника и электроника: Учеб. Пособие для вузов /В.В. Кононенко, В.И. Мишкович, В.В. Муханов и др. – Ростов н/Д.:Феникс, 2004 – 747 с. 8. Электронные формы методических пособий, изданных в Институте дистанционного образования Томского политехнического университета :[CD]. – ВУЗ/изд. – Томск:, 2005. – 182 МБ. 105