Лекция 11. Проектирование фильтра – дециматора для ΔΣ АЦП.
advertisement

Лекция 11. Проектирование фильтра – дециматора для ΔΣ АЦП.
ΔΣ АЦП состоит из ΔΣ модулятора и цифрового фильтра – дециматора. Фильтр –
дециматор прореживает входную последовательность и убирает высокочастотные шумы
квантования ΔΣ модулятора.
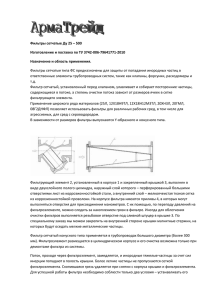
Обычно фильтр – дециматор состоит из нескольких каскадов (рис. 11.1).
f0
fs
ΔΣ модулятор
fa
Нерекурсивный
цифровой
фильтр Sinc типа
Рекурсивный
цифровой
фильтр
2f0
Рис. 11.1. Структурная схема ΔΣ АЦП.
Цифровой фильтр может быть представлен структурной схемой, изображенной на рис.
11.2. На этом рисунке x(nT) и y(nT) – соответственно входное воздействие и реакция
фильтра на это воздействие.
Цифровой
фильтр
x(nT)
y(nT)
Рис. 11.2. Цифровой фильтр.
Реакцию физически реализуемого нерекурсивного фильтра можно записать в виде
y(nT) = Σi=0 ; N ai x( nT-iT )
(11.1)
Реакция рекурсивного фильтра в некоторый момент времени зависит как от входного
воздействия, так и от значений реакций в другие моменты времени и для физически
реализуемого фильтра может быть представлена в виде
y(nT) = Σi=0 ; N ai x( nT-iT ) - Σi=0 ; N bi y( nT-iT )
(11.2)
Проектирование цифрового фильтра включает в себя несколько основных этапов:
аппроксимацию, схемную реализацию и учет ошибок арифметического устройства.
На этапе аппроксимации определяется передаточная функция фильтра. В ΔΣ АЦП
основной функцией фильтра – дециматора является удаление шумов квантования. Наряду с
этим производится фильтрация частотных составляющих входного сигнала.
При реализации рекурсивного цифрового фильтра обычно используют следующие
аппроксимации: Баттерворта, Бесселя, Чебышева и эллиптическую. Тип аппроксимации и
порядок фильтра определяется на основе совместного анализа АЧХ цифрового фильтра и
АЧХ формирования шумов квантования ΔΣ модулятора, а также требований к фильтрации
входного сигнала.
Для определения передаточной функции цифрового фильтра используется z –
преобразование.
z–преобразование определяется выражением (одностороннее преобразование)
Y (z)
y (nT )z n
,
(11.3)
n 0
где y (nT ) представляет собой последовательность выборок сигнала, взятую в дискретные
моменты времени 0, T, 2T, …, nT; T 1/ fs .
Комплексную переменную z можно представить в полярных координатах z re iT или
для частного случая r 1: z e iT . В этом случае выражение (11.3) принимает вид
Y (e iT ) y (nT )e inT .
Оператор z 1 соответствует единичной задержке в последовательности дискретных
выборок во временной области.
Дискретная или цифровая система, на вход которой подается воздействие x(nT ) и
реакция которой (выходной сигнал) y (nT ) , описывается передаточной функцией
m
H(z)
Y ( z ) am z ... a1z a0
K
X ( z ) bn z n ... b1z b0
m
(z zzk )
k 1
n
,
(11.4)
(z z pk )
k 1
где K – вещественный коэффициент; z zk и z pk – нули и полюсы соответственно.
Частотная характеристика системы определяется заменой z на e iT . В результате
АЧХ можно представить в виде
m
H (e
iT
) K
e iT
k 1
n
zzk
(11.5)
e
iT
k 1
z pk
ФЧХ системы
arg H (e iT )
m
n
arg( e iT
zzk ) arg( e iT z pk )
k 1
(11.6)
k 1
e iT на z плоскости представляет собой окружность единичного радиуса с центром в
начале координат.
Пример карты нулей и полюсов дискретной системы приведен на рис. 11.3.
Im
i
e
e
i xT
-z
z(-1)
ei
i xT
x T-z
p(0)
-1
1
-i
Рис. 11.3. Карта нулей и полюсов дискретной системы
В соответствии с z–преобразованием импульсная характеристика представляет собой
n
линейную комбинацию функций вида z pk
. Система будет устойчивой, если z pk 1 , то
есть если все ее полюсы лежат внутри единичной окружности.
Используя различные правила можно установить соотношения между комплексной
переменной передаточной функции аналоговой системы s и комплексной переменной
передаточной функции дискретной системы z. Установленные формальные соотношения,
как правило, соответствуют конкретным схемотехническим реализациям элементов
дискретных аналоговых цепей.
При использовании обратной разности
s
1 z 1
1
или z
1 Ts
T
(11.7)
При использовании прямой разности
s
1 z 1
Tz 1
или z 1 Ts
(11.8)
Билинейное преобразование
s
2 1 z 1
1 sT / 2
или z
1 sT / 2
T 1 z 1
(11.9)
Отображения комплексных переменных с помощью билинейного преобразования
показано на рис. 11.4.
Ось i плоскости s отображается в окружность единичного радиуса на плоскости z .
Дискретная и аналоговая частоты d и a при билинейном преобразовании связаны
соотношением (рис. 11.5)
d
2
T
arctg a
T
2
(11.10)
При высокой частоте дискретизации, все три вида преобразования приводят к одному
результату, который соответствует методу прямой разности
z 1 sT
(11.11)
Im
1
Im
i
-1
1
2
4
3
4
2
-i
-
3
Рис. 11.4. Отображения комплексных переменных с помощью билинейного преобразования
Рис. 11.5. Связь дискретной и аналоговой частот при билинейном преобразовании
Передаточная функция в z – области рекурсивного фильтра может быть представлена в
виде
H (z) = Y( z ) / U ( z ) = N( z ) / D ( z ) = N( z ) / ( 1 + D’ ( z ))
где N(z) = Σi=0 ; N aiz-i ; D’(z) = Σi=0 ; N biz-i
(11.12)
Таким образом реализация H (z) может быть сведена к реализации двух более простых
функций N(z) и D’(z), как показано на рис. 11.6.
X(z)
N(z)
+
Y(z)
-D’(z)
Рис. 11.6. Реализация рекурсивного фильтра.
В качестве нерекурсивного фильтра применяется фильтр Sinc – типа. Входной сигнал ΔΣ
АЦП с максимальной частотой f0 дискретизируется и преобразуется в выходной сигнал ΔΣ
модулятора с частотой fs (коэффициент передискретизации равен М = fs / 2 * f0).
Нерекурсивный фильтр – дециматор фильтрует входной сигнал и прореживает
последовательность, обеспечивая частоту следования данных fa в несколько раз
превышающую частоту следования выходных данных АЦП. Таким образом, на рекурсивный
фильтр, который представляет собой сложную цифровую схему, поступает сигнал
достаточно низкой частоты.
Обычно в качестве нерекурсивного фильтра Sinc – типа используют sincL+1 фильтр,
представляющий собой цепочку из L+1 усредняющих sinc фильтров.
Передаточная функция усредняющего sinc фильтра может быть записана в виде
H (z) = Y( z ) / U ( z ) = (1 / M) Σi=0, M-1 ( z-i )
(11.13)
Здесь М – коэффициент передискретизации. Из передаточной функции видно, что данный
тип фильтра является нерекурсивным фильтром, или FIR ( finite impulse response )
фильтром, то есть фильтром с конечной импульсной характеристикой ( КИХ фильтр).
Покажем, что фильтр с передаточной функцией H ( z ) является фильтром sinc – типа.
Перепишем передаточную функцию H ( z ) 11.13 в виде
M Y ( z ) = ( 1 + z-1 + z-2 + … + z-(M-1) ) U ( z )
(11.14)
Выражение 11.14 может быть записано в следующем виде
M Y ( z ) = ( z-1 + z-2 + … + z-M ) U ( z ) + (1 - z-M ) U ( z ) =
= M z-1 Y ( z ) + (1 – z-M ) U ( z )
(11.15)
Группируя члены с Y ( z ), получим выражение для передаточной функции
H (z) = Y( z ) / U ( z ) = (1 / M) { (1 – z-M ) / (1 – z-1) }
(11.16)
Частотная характеристика может быть найдена подстановкой z = ejw
H (ejw) = Y(ejw) / U (ejw) = (1 / M) { (1 – e -jwM ) / (1 – e -jw ) }
(11.17)
Используя формулу Эйлера получаем
H (ejw) = sinc ( ω M / 2 ) / sinc ( ω / 2 )
Здесь sinc ( x ) = sin ( x ) / x
(11.18)
Передаточная функция каскада из L+1 усредняющих фильтров имеет вид
H (z) = Y( z ) / U ( z ) = (1 / ML+1) { (1 – z-M ) / (1 – z-1) }L+1
(11.19)
В этой формуле L – порядок ΔΣ модулятора. Использование L+1 каскадов обусловлено
необходимостью превышения затухания АЧХ ФНЧ фильтра – дециматора при повышении
частоты над возрастанием шумов квантования ΔΣ модулятора.
Передаточную функцию 11.19 можно переписать в виде
H (z) = Y( z ) / U ( z ) = (1 / ML+1) { (1 – z-M ) }L+1 { 1 / (1 – z-1) }L+1
(11.20)
Передаточная функция 11.20 может быть реализована с помощью цепочки из L+1
интеграторов и цепочки из L+1 дифференциаторов (рис. 11.7). Структура, показанная на
рис. 11.8 предпочтительнее структуры показанной на рис.11.7 из-за пониженной частоты
дискретизации дифференциаторов.
+
+
+
fs
+
_
z
-1
z
-1
z
-M
_
z
-M
Рис. 11.7. Структурная схема sinc фильтра.
+
+
+
fs
fs/M
z
-1
z
-1
+
_
z
-M
_
z
fs/M
-M
fs/M
Рис. 11.8. Структурная схема sinc фильтра с пониженной частотой тактирования
дифференциаторов.
fs/M