Яковлев С., Сафонов И.
advertisement

393
ИЗМЕРЕНИЕ ОБЪЕМА ОБРАЗЦА ПОРИСТОГО МАТЕРИАЛА
С. Ю. Яковлев1, И. В. Сафонов1
1Московский
Инженерно-Физический Институт (Государственный Университет),
Россия, 115408, Москва, Каширское ш. 31, {Yakovlev.Serge; Ilia.Safonov}@gmail.com
На производстве для контроля качества эластичного пенополиуретана требуется
измерять объем образцов материала. Предложен алгоритм измерения объема
образца по изображениям его граней. По изображениям граней образец
аппроксимируется гексаэдром, объем которого вычисляется аналитически.
Предложен итеративный подход, основанный на дроблении геометрической
модели образца на более мелкие гексаэдры. Испытания показали, что
предложенный способ обеспечивает лучшие повторяемость и воспроизводимость
результатов, повышает скорость измерений и дает ряд дополнительных
преимуществ.
Введение
Многие производства для контроля
технологических процессов и качества
материалов используют системы обработки
изображений.
На
ряде
химических
предприятий, производящих эластичный
пенополиуретан
(ППУ),
используется
система контроля качества [2], в которой
изображения регистрируют планшетным
сканером.
Одним
из
важнейших
параметров, влияющих на качество и
стоимость ППУ, является его кажущая
плотность, т.е. отношение массы образца к
его объему с учетом пор.
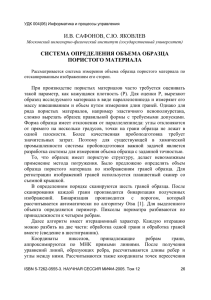
Для измерения кажущейся плотности из
произведенного
материала
вырезают
тестовые образцы формы, близкой к
параллелепипеду [3]. Измерение массы
производится с высокой точностью с
помощью электронных весов. Однако
достаточно точное определение объема
традиционными методами сложно из-за
того, что материал эластичный, и вырезать
идеальный параллелепипед без применения
дорогостоящих инструментов практически
невозможно. При резке ППУ подвергается
упругим деформациям, грани образца
имеют отклонения от плоскости, и не
перпендикулярны друг другу (Рис. 1).
Стандартным методом измерения объема
пористых материалов является измерение
его линейных размеров с помощью
линейки или толщиномера [4]. Далее объем
определяется как произведение линейных
размеров. Из-за того, что образец не
является параллелепипедом, а также из-за
субъективных факторов, относительная
погрешность таких измерений достигает
5%, процесс измерений имеет плохую
повторяемость и воспроизводимость, что в
ряде случаев неприемлемо.
Рис. 1. Изображения граней образцов
пенополиуретана
Авторами был предложен алгоритм
измерения
объема
образца
по
изображениям его граней, полученных
сканированием на планшетном сканере при
снятой крышке сканера. Шесть граней
образца сканируются в определенном
порядке. Жесткий порядок сканирования
позволяет однозначно идентифицировать
вершины
и
ребра
грани
при
восстановлении 3D модели образца.
394
Определение объема образца по
изображениям граней
Алгоритм измерения объема можно
разделить на 2 этапа: 1) обработка
изображений граней и идентификация
ребер и вершин на плоскости; 2)
восстановление 3D модели образца.
Обработка грани
После регистрации изображения грани,
производится его бинаризация с порогом,
рассчитанным автоматически по критерию
Otsu [5]. Затем выделяется максимальный
по площади объект. Бинарное изображение
проекции может иметь дырки, которые
заполняются. Далее для сглаживания
границ
объекта
применяется
морфологическая операция закрытия [6].
В данной работе понятие «проекция грани»
означает бинарное изображение грани, если
не оговорено другое. Каждая проекция
грани образца имеет четыре стороны,
которые соответствуют ребрам образца.
Далее термин «ребро» означает ребро
геометрической модели проекции грани,
если не оговорено иное.
На следующем этапе проекция грани
аппроксимируется четырехугольником. Для
этого по алгоритму Inner Boundary Tracing
[7],
выделяется
контур
проекции.
Результатом выделения является периметр
проекции грани - последовательность
координат
пикселов,
принадлежащих
границе объекта (Рис. 3). Обозначим точки
периметра как P pti , i 1, N , где pt i координаты i-й точки периметра, N количество точек периметра.
Рис. 3. Выделение контура грани
Далее точки периметра разбиваются на
четыре
непересекающиеся
подпоследовательности, каждая из которых
определяет одно ребро. Для этого
определяются угловые точки грани, тогда
последовательность точек, заключенных
между двумя угловыми точками будет
описывать соответствующее ребро.
Пусть pti P , i 1, N . Введем функцию
angle ( pti ) , которая возвращает угол между
векторами pti ptk и ptm pti , где точки
pt k , pt m P . Индекс k min j , где
pti ptk Lang . Индекс
j (i, N ] ,
где
и
m max j ,
pt m pt i Lang . Здесь Lang - параметр,
задаваемый как максимально допустимая
длина рассматриваемого вектора (Рис. 4).
Углы проекции грани плохо обусловлены:
скошены, имеют закругления. Поэтому
будем считать, что угловой точкой pt ang
является точка проекции, для которой
выполняется
следующее
условие:
angle ( ptang ) min angle ( pti ) . Здесь
pt i
лежит внутри окружности, центр которой
соответствует физическому расположению
угла на проекции грани, а радиус выбран
таким образом, чтобы данная окружность
не пересекалась с окружностями вокруг
других углов проекции грани.
j [1, i ) ,
ptk
и
Lang
pti
Lang
ptm
Рис. 4. Определение угла в точке pti
Алгоритм
поиска
угловых
точек
следующий. Последовательно с заданным
шагом S Lang перебираются точки
периметра. Индекс l следующей точки
определяется как l min j , j (i, N ] ,
ptl pti S , где pt i и ptl, - текущая и
следующая точки соответственно. Точки
перебираются до тех пор, пока значение
угла не станет меньше заданного порога.
Найденная угловая точка добавляется к
множеству уже найденных угловых точек,
после чего продолжается поиск следующей
угловой точки.
395
После того, как все угловые точки найдены,
периметр
разбивается
на
четыре
подпоследовательности. Для того чтобы
избежать ошибок, связанных с неточной
локализацией угловых точек, с начала и с
конца
каждой
подпоследовательности
отбрасывается часть точек.
После классификации точек периметра
проекции
грани,
полученные
подпоследовательности аппроксимируются
прямыми по методу полных наименьших
квадратов (Total Least Squares) [1]. Затем
определяются вершины четырехугольника,
которые определяют проекцию грани. По
геометрической модели проекции грани
рассчитываются ее параметры: длины
ребер и углы между ними.
аналитически. Объем образца является
суммой объемов этих пирамид.
Восстановление трехмерной модели
Описанный
выше
алгоритм
аппроксимирует образец неправильным
гексаэдром. Такой подход позволяет учесть
неперпендикулярность граней друг другу.
Однако грани образца обычно имеют
отклонения от плоскостей. Для того чтобы
снизить погрешность расчета значения
объема, модель образца разбивается на
части.
При разбиении модели образца, каждое
ребро каждой геометрической модели
проекции грани разделяется на две части.
Для этого определяется середина ребра, и
подмножество
точек
периметра,
составляющих ребро, разделяется на две
части. В результате разбиения каждого
ребра, проекция грани разбивается на
четыре части. Каждая часть затем
аппроксимируется четырехугольником в
соответствии с алгоритмом, описанным
выше. Разбиение производится для каждой
проекции грани, в результате гексаэдр
разбивается на восемь частей. Критериями
остановки
итерационного
алгоритма
служат: достижение заданной точности;
превышение заданного числа итераций;
ограничение на длину ребра грани.
После аппроксимации проекций граней
четырехугольниками,
длины
соответствующих ребер проекций смежных
граней могут не совпадать. Такое
несоответствие
объясняется
погрешностями операций сканирования,
бинаризации и аппроксимации. Поэтому
требуется коррекция длин ребер для
каждой пары соответствующих ребер. В
качестве новой длины ребер берется
среднее арифметическое значение их длин.
Далее геометрические модели смежных
граней обрабатываются по отдельности, и
параметры
геометрических
моделей
проекций граней рассчитываются заново.
Итак, на данном этапе имеется шесть
проекций граней, аппроксимированных
четырехугольниками, которые определяют
образец. Для каждой модели проекции
грани рассчитаны длины ребер и углы
между
ними.
3D
моделью
рассматриваемого
тела
является
неправильный гексаэдр. Для расчета
объема гексаэдра, каждая модель грани
разбивается по диагонали на две части,
таким образом, мы получаем четыре
«внешние» пирамиды ABDE, CBDG,
EGHD, EFGB и одну «внутреннюю» DEGB
(Рис. 6). Каждая пирамида описывается
тремя ребрами, выходящими из одной
вершины и углами между ними. Параметры
внутренней пирамиды рассчитываются по
известным значениям параметров граней.
Объем каждой пирамиды рассчитывается
F
G
E
H
B
C
A
D
Рис. 6. Геометрическая модель исследуемого
образца пористого материала
Итерационный подход
Результаты
Тестирование предложенного алгоритма
проводилось
в
условиях
заводской
лаборатории на системе, состоящей из
планшетного
сканера
(HP3670)
и
персонального компьютера. В качестве
тестовых
объектов
использовались
396
образцы, имеющие форму близкую к
параллелепипеду и размер (1003, 1003,
503) мм.
0,016
0,014
0,012
0,010
серия представляла собой измерение
объема
образца
с
помощью
рассматриваемой системы 30 раз. На рис. 8.
представлена
гистограмма
значений
относительной погрешности измерений.
При измерении объема одного и того же
образца относительная погрешность не
превышает 0.5%.
D 0,008
Заключение
0,006
0,004
0,002
0,000
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
Sample #
Рис. 7. Относительная разница между
автоматическим и традиционным способами
измерения объема образца
0,03
0,025
0,02
Традиционный
D 0,015
Предложенный
0,01
0,005
0
1
2
3
4
5
№ образца
Рис. 8. Гистограмма значений относительной
погрешности по сериям измерении
Проводились испытания над 30 образцами.
Объем
каждого
образца
был
предварительно
измерен
тремя
специалистами традиционным способом,
затем эти данные были усреднены. Затем
объем каждого образца был измерен с
помощью рассматриваемой системы. На
Рис. 7 представлен график, где по оси
абсцисс отложен номер измеряемого
образца, а по оси ординат относительная
разница
между
измерениями
традиционным и предложенным методами,
рассчитанная
по
формуле:
D 2 Vm Va /(Vm Va ) , где V m - среднее
значение
объема,
посчитанного
традиционным способом, V a - объем,
посчитанный автоматическим способом.
Результаты измерения показывают, что
результаты
измерения
объема
предложенным и традиционным способами
совпадают.
Для тестирования воспроизводимости и
повторяемости измерений производились
серии испытаний для 5 образцов. Каждая
В результате работы разработан алгоритм
измерения объема образца пористого
материала,
близкого
по
форме
к
параллелепипеду. Алгоритм интегрирован
в существующую систему контроля
качества. Тестовые испытания в условиях
заводской
лаборатории
показали
соответствие
результатов
измерений
предложенного
способа
и
способа,
являющегося
отраслевым
стандартом.
Однако
предложенный
способ
обеспечивает лучшую воспроизводимость и
повторяемость результатов измерений.
Учитывая, что разработанное программное
обеспечение
позволяет
одновременно
обрабатывать 4 образца, удалось более чем
в 5 раз сократить время необходимое для
измерений. Также стоит отметить ряд
дополнительных
преимуществ:
возможность ретраспективного анализа и
документирование результатов измерений.
Описанная система контроля качества
установлена и успешно используется на
нескольких химических предприятиях.
Список литературы
1. В. Вежневец, А. Дегтярева. Line fitting, или
методы аппроксимации набора точек прямой.
Графика и мультимедиа online, 2003.
2. I. V. Safonov, G. N. Mavrin, K. A. Kryzhanovsky.
Segmentation of convex cells with partially
undefined boundaries. Pattern recognition and image
analysis, vol.16, No.1, 2006, pp.46-49.
3. ISO 845 : 1977. Cellular plastics and rubbers
Determination of apparent density.
4. ISO 1923 : 1981. Cellular Plastics and Rubbers Determination of Linear Dimensions.
5. K. Ch. Lin. On improvement of the computation
speed of Otsu’s image thresholding. Journal of
Electronic Imaging 14(2), Apr–Jun 2005.
6. L. G. Shapiro, G. C. Stockman. Computer Vision.
Prentice Hall, 2001.
7. M. Sonka, V. Hlavac and R. Boyle. Image
Processing, Analysis, and Machine Vision. An
Imprint of Brooks and Cole Publishing, 1998.