УДК 625:332:530.12 Боровик Виталий Сергеевич ФГБОУ ВПО «Волгоградский государственный архитектурно-
advertisement

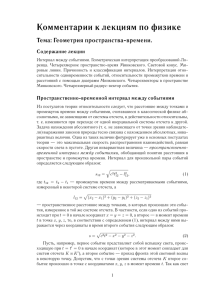
УДК 625:332:530.12 Боровик Виталий Сергеевич ФГБОУ ВПО «Волгоградский государственный архитектурностроительный университет» Россия, Волгоград д.т.н., профессор, заведующий кафедрой «Экономика и управление дорожным хозяйством». E-mail: borovikv@mail.ru Боровик Виталий Витальевич ФГБОУ ВПО «Волгоградский государственный архитектурностроительный университет» Россия, Волгоград к.т.н., доцент кафедры «Строительство транспортных сооружений» E-mail: borovikvv70@mail.ru ВИЗУАЛИЗАЦИЯ ПРОЦЕССА ВНЕДРЕНИЯ ДОСТИЖЕНИЙ НАУКИ И ТЕХНИКИ В ПРОСТРАНСТВЕ 4D На примере управления экономической системой дорожной отрасли с помощью квази-преобразования Лоренца и пространства Минковского сделана попытка моделирования управления в четырехмерном пространстве, объединяющем физическое трёхмерное пространство ресурсов и время. Ключевые слова: управление, четырехмерное пространство, квазипреобразование Лоренца, пространство Минковского. Borovik Vitaly Sergeevich Federal State Educational Institution of Higher Professional Education Volgograd State University of Architecture and Civil Engineering Russia, Volgograd Doctor of Technical Sciences, Professor, Head of Department "Economics and road management." E-mail: borovikv@mail.ru Borovik Vitaly Vitalyevich Federal State Educational Institution of Higher Professional Education Volgograd State University of Architecture and Civil Engineering Russia, Volgograd Candidate of Technical Sciences, Associate Professor of "Construction of transport facilities" E-mail: borovikvv70@mail.ru VISUALIZATION OF PROCESS OF INTRODUCTION OF ACHIEVEMENTS OF SCIENCE AND TECHNOLOGY IN SPACE 4D An example of managing an integrated economic system road sector by means of the Lorentz quasi-transformation and Minkowski space attempted management simulation in four-dimensional space that unites the physical threedimensional space and time. Keywords: management, four-dimensional space, the Lorentz quasitransformation and Minkowski space Введение Многомерная визуализация является благодатной областью для исследований и практических разработок. Она обеспечивает потребности многих задач дорожной отрасли. Задач, связанных с визуализацией, становится всё больше. Растёт и число методов, решающих такие задачи. Можно надеяться, что накопление большого арсенала методов позволит создать программные системы, решающие широкий класс задач визуализации, аналогично тому, как системы, подобные MatLab, успешно решают задачи вычислительной математики [4]. К настоящему времени наиболее эффективным экономическим аппаратом, учитывающим количественные и качественные характеристики использования ресурсов, существенно облегчающим процесс понимания экономического анализа и прогнозирования является производственная функция (ПФ) [11]. Следует признать, что ПФ опосредованно отражает влияние социальных, технологических, гуманитарных и др. аспектов поведения экономического агента. На эти свойства ПФ указывал Й. Шумпетер, отмечая, что «…диаграмма с двумя факторами является, возможно, самым лучшим средством демонстрации (выделено авторами.) на элементарном уровне того, как ресурсы, взаимодействующие в производстве, могут в определенных пределах «конкурировать» друг с другом и как два эффекта соотносятся в случае двух взаимозаменяемых факторов» [14, стр. 1373]. Узловой раздел моделирования в системе управления инновационноинвестиционным процессом в дорожной отрасли связан с решением одной из основных задач управления – результат, достигаемый процессом должен превышать затраты [21]. Решение последней замыкается на использовании численных экономических параметров в отрыве от качественных характеристик конкретного объекта, например, [13]. К настоящему моменту отсутствует доступные модели, представляющие числовую информацию и физическое проявление процесса управления инновационно-инвестиционным процессом в дорожной отрасли в виде, удобном и адекватном для зрительного наблюдения, анализа и определения оптимального варианта [17]. Инновационный тип развития создает предпосылки для коренного изменения структуры и содержания моделей, учитывающих взаимосвязь производственных процессов и темпов их выполнения [20, 22]. В современных условиях время как социально-экономическая категория выступает как ресурс в значительной мере определяющий цели экономических систем (ЭС) [7,10]. Стремление выяснить особую роль времени в развитии процессов, происходящих в ЭС в условиях инновационного развития, приводит к ряду предположений, заслуживающих серьезного внимания [6, 20]. Представляет также интерес замечание Й. Шумпетера относительно введения в ПФ параметра времени: «Если мы хотим основать свою теорию производства на теории «окольного» процесса Джевонса - Бём-Баверка Тауссига, мы можем ввести время непосредственно в производственную функцию, записав: x (v1, v2 ,...vn ; t ) к этому шагу подводит трактовка Викселем проблем капитала, и этот шаг был сделан многими современными авторами…» [14, стр. 1353]. Дж. Уитроу, отстаивая мнение о реальности и объективности времени, отмечает, что: «Центральным пунктом дискуссии является статус «становления» или совершающегося, а также прошлого, настоящего и будущего; другими словами, тех черт времени, для которых не имеется пространственных аналогий» [25]. В этой связи пространственное моделирование управления с включением параметра времени в качестве четвертого измерения является весьма актуальной задачей [19]. Постановка проблемы Функционирование современных ЭС рассматривается как многофакторный процесс. Для наиболее точного прогнозирования влияния инновационно-инвестиционного воздействия на результаты деятельности ЭС во времени ставится задача теснее связать труд и производственные фонды между собой и, в то же время, более рельефно выделить действие факторов в их взаимосвязи и взаимозависимости, повысить их информационную нагрузку и её разнообразие [5]. Такие требования неизбежно приводят к необходимости решения задачи управления в многомерном пространстве. Пространство–время (п.-в.) геометрическая конструкция, описывающая пространственные и временные отношения в физических теориях, в которых эти отношения рассматриваются как взаимозависящие. Разработка основных положений п.-в. связана с формулированием и систематизацией основных положений теории относительности. П.-в. в этой теории является четырехмерным псевдоевклидовым пространством с линейным элементом (1) ds 2 c 2 dt 2 dx 2 dy 2 dz 2 где x, y, z пространственные координаты, а t - временнàя координата, с –скорость света. Эта система координат называется в физике Галилеевой и соответствует инерциальной системе отсчета (и.с.о.) [8, стр. 719]. (в специальной теории относительности и.с.о. обычно задаются Галилеевой системой координат, в классической механике – декартовой системой координат.) В исследованиях Галилея заслуживает внимания способность преобразования Галилея сохранять пространственные размеры тел и длительности физических процессов [8, стр. 148]. Переход между различными Галилеевскими системами координат, при соответствующих и.с.о., движущихся друг относительно друга, осуществляется с помощью Лоренца преобразования [13]. Это преобразование дает возможность осуществлять пространственное отражение множества точек во времени, которое с позиций физики является преобразованием перехода от одной инерциальной системы отсчета к другой, движущейся относительно первой со скоростью V. Инерциальные системы отсчета - физические модели, в которых мы можем указать хотя бы одну "неподвижную точку" (или "неподвижное тело"). При выполнении экономического анализа указать хотя бы одну неподвижную точку не составляет труда. Для примера – точка достигнутого уровня экономического развития, географические характеристики конкретного региона и др. В рассматриваемой системе временнáя координата оказывается выраженной как через временнýю, так и через пространственные координаты. Учитывая, что преобразование Лоренца является аналогом ортогональных преобразований (или обобщением понятия движения) в евклидовом пространстве, возникает возможность связать в пространстве Минковского [23] две Галилеевы системы координат рис. 1. у у' к к' 0 0' v x z z' x' Рис.1. Геометрическая интерпретация преобразования Лоренца Принимая во внимание также, что система координат Галилея отличается от декартовой системы координат только приложениями системы отсчета [7, стр. 843] можно принять с достаточной степенью обоснованности приведенный способ визуализации четырехмерного пространства в качестве первого приближения.. Полезно отметить, что «теорию относительности часто критиковали за то, что она неоправданно приписывает центральную теоретическую роль явлению распространения света, основывая понятие времени на его законах. Положение дел, однако, примерно таково. Чтобы придать понятию времени физический смысл, нужны какие-то процессы, которые дали бы возможность установить связь между различными точками пространства. Вопрос о том, какого рода процессы выбираются при таком определении времени, несущественен. Для теории выгодно, конечно, выбирать только те процессы, относительно которых мы знаем что-то определенное. Распространение света в пустоте благодаря исследованиям Максвелла и Лоренца подходит для этой цели в гораздо большей степени, чем любой другой процесс, который мог бы стать объектом рассмотрения» [15]. (Выделено авторами статьи.) Отсюда можно сделать очень важный вывод. В системе (1) с – скорость света в вакууме – константа. Для решения прикладной задачи её можно заменить на константу, которая в наибольшей мере удовлетворяет требованиям анализируемого процесса. А. Эйнштейн пришел к выводу, что принцип относительности является всеобщим. На основании постулата, что «все законы природы одинаковы во всех инерциальных системах отсчета», он установил, что не только механические, но и все физические законы одинаковы во всех инерциальных системах отсчета [16]. Например, можно принять максимально возможную установленную (или расчетную) производительность труда, технологические условия с установленными характеристиками и др. Следовательно, экономические процессы, рассматриваемые во времени, могут стать объектом прикладного экономического анализа с помощью теории п.-в. В модели в качестве факторов могут выступать экономические или технологические элементы, а также экономические и технические факторы, развивающиеся во времени. Целью исследования является моделирование управления инновационно-инвестиционным процессом в ЭС, позволяющего наглядно представить результаты экономического анализа на основе визуализации четырехмерного пространства, способствующего лучшему пониманию технико-экономических процессов, а также оценки и поиску оптимального управления. Моделирование процессом управления инновационно-инвестиционным Главная задача – предложить теоретическую платформу, позволяющую выполнять анализ пространственного распределения, обоснование вероятных ситуаций и прогнозирование результатов инновационно-инвестиционного процесса в системе регионального управления. В качестве наиболее универсальной формы анализа функционирования ЭС предлагается использовать ПФ типа КоббаДугласа, например, вида: n Y C0 xii . (2) Где Y – расчетный индекс (например, прибыль, объем работ и др. в натурально-вещественном или стоимостном выражении); αi, i=1, n - «веса», характеризующие вклад xi в Y; C0 – коэффициент, характеризующий совокупное влияние факторов, не учтенных моделью. Рассмотрим трехмерную графическую модель (Рис.2) ПФ вида (1). Функция наиболее доступна для понимания в виду возможности ее наглядного представления в трехмерном пространстве [2, 3]. Кривые -1Y и 2Y соединяют точки с одинаковыми численными значениями ВРП. Их проекции – 1Y1 , 2Y1 ,1Y2 , 2Y2 ,1Y3 , 2Y3 - изокванты. i 1 Рис. 2. Пространственная эконометрическая модель 3D на основе ПФ, отображающая поверхность с управлением, характеризуемым различными сочетаниями потребления ресурсов при перемещении с уровня 1У на 2У. Как видно на рис. 2, из точки А, характеризуемой, например, объемом работ 1Y, объем работ 2Y может быть достигнут в конкретной ЭС путем реализации инновационно-инвестиционного процесса бесконечным множеством сочетаний труда и прочих ресурсов. Например, точки В, С и D, показывающие некоторые варианты выхода на достижение объема работ, характеризуемого как 2Y. В зависимости от возможностей ЭС, квалификации кадров, качества управления, социальных условий, качества ресурсов, цели ЭС, задач и др. выбирается тот или иной вариант использования ресурсов. Рассмотрим три варианта выхода с 1Y на более высокий уровень 2Y, обеспечиваемый реализацией инновационно-инвестиционного процесса. Рассмотрим векторы AB, AC и AD . Каждому из них соответствует свое сочетание использования ресурсов: Ax1 , Ax 2 , Bx1 , Bx 2 , Dx1 , Dx 2 . Будем считать оптимальным с математических позиций вариант AB , т.к. AB 2У (к касательной в точке В) и является кратчайшим расстоянием между 1Y и 2Y. Известно, что каждая ЭС характеризуется индивидуальной, присущей только конкретной ЭС системой использования ресурсов [2]. Поэтому управление, в котором в качестве критерия оптимальности принято кратчайшее расстояние между изоквантами, может рассматриваться для реальной ЭС только как идеальный вариант. В качестве примера рассмотрим ПФ двух ЭС: Y1 2.231x11,123 x20,934 x30,567 ; Y2 1, 037 x10,672 x20,785 x30,467 , где x1 – основные средства; x2 – оборотные средства; x3 – затраты труда. Допустим, что у этих ЭС абсолютно одинаковые объемы ресурсов. Однако коэффициенты эластичности у первой ЭС больше чем у второй. Это свидетельствует о том, что ресурсы у первой ЭС используются более интенсивно, чем у второй. Кроме этого влияние факторов, не учтенных моделью - C0 , у первой ЭС в два с лишним раза больше чем у второй. В конечном итоге получим Y1˃Y2. Подчеркнем, – при совершенно одинаковых объемах затраченных ресурсов. В этой связи реализацию инновационно-инвестиционного процесса в ЭС нами предлагается рассматривать как алгебраическое введения в её ПФ некоторых дифференциалов dxi , i=1, n , относительно соответствующих факторов – xi (ресурсов [10]. Например, внедрение прогрессивных технологий может способствовать увеличению основных фондов –х1. Тогда, как правило, использование высокопроизводительных машин и механизмов способствует увеличению потребления дорожно-строительных материалов –х2, и, например, сокращению затрат на труд –х3. Следовательно, в ПФ необходимо ввести: dx1 , dx2 , dx3 . Понятно, что эффективность освоения этих дифференциалов (приращений ресурсов) может быть различной в зависимости, прежде всего, от качества управления процессом. Априори можно констатировать, что при всех прочих равных условиях введение в ПФ первой ЭС дифференциалов ресурсов dxi , i=1,3 даст больший прирост Y , т.к. ресурсы в первой ЭС используются более интенсивно. Обоснование четырехмерной модели управления инновационноинвестиционным процессом с помощью квази-преобразования Лоренца По Минковскому положение события задаётся четырьмя координатами — тремя пространственными и одной временнóй [20]. Обычно используются координаты: x1 x, x2 y x3 z , где х, у, z – прямоугольные декартовы координаты события в некоторой инерциальной системе отсчёта (ИСО) и x°=ct, где t – время события, с – скорость света в вакууме. Геометрические свойства четырехмерного пространства определяются выражением для квадрата расстояния между двумя событиями (интервала) s 2 : s 2 (dx ) 2 dx 2 dy 2 dz 2 , (3) где dx 2 , dy 2 , dz 2 – разности координат событий, а dt – разность их моментов времени. Пространство с таким s 2 – псевдоевклидово. Для решения задачи управления в обобщенном четырехмерном пространстве выражение (3) может быть представлено как: (4) s 2 (dx ) 2 dx12 dy22 dy 2 , где x1 – труд; x2 – фонды (основные и оборотные); y – например, объем ВРП. Тогда x Qt , где Q – условная максимальная производительность труда, q – производительность труда, характеризующая систему, в которой планируется инновационно-инвестиционный процесс. При переходе от одной инерциальной системы отсчета к другой пространственные координаты и время преобразуются друг через друга посредством квази-преобразования Лоренца. Известно, что система отсчёта называется инерциальной, если по отношению к ней любая свободная от взаимодействий с другими объектами (изолированная) материальная точка движется равномерно и прямолинейно. В специальной теории относительности преобразованию Лоренца подвергаются координаты (x, y, z, t) каждого события при переходе от одной ИСО к другой. Аналогично преобразуются координаты любого четвертого вектора [13]. Преобразования Лоренца – это преобразования, сохраняющие неизменной метрику Минковского. Это значит, что метрика сохраняет простейший вид при переходе от одной инерциальной системы отсчёта к другой. Преобразования Лоренца – это аналог для метрики Минковского ортогональных преобразований, осуществляющих переход от одного ортонормированного базиса (базис, составленный из попарно ортогональных векторов) к другому или обобщением понятия движения в евклидовом пространстве. Общая группа преобразования состоит из комбинаций пространственных отображений во времени и преобразований, которые с физической точки зрения являются преобразованиями перехода от одной инерциальной системы отсчета к другой [18]. Преобразования в плоскости с псевдоевклидовой метрикой является специфической чертой преобразования, что чрезвычайно важно для нашего исследования. Преобразования в процессе управления осуществляются при коллинеарных пространственных осях, если инерциальная система отсчета К движется относительно инерциальной системы отсчета К с постоянной скоростью (рис. 1). В нашей задаче под скоростью мы понимаем производительность труда – q, характерной для инерциальной системы отсчета, в которой планируется инновационно-инвестиционный процесс и Q – максимальная производительность труда, принятая в качестве эталона, характерная для наиболее прогрессивной ЭС. Начала координат совпадают в начальный момент времени в обеих системах [18]. Тогда прямые квази-преобразования Лоренца для решения задачи управления в трехмерном пространстве и времени получат вид: x1 x1qt q2 1 2 Q , x2 x2 , y y, q t 2 x1 Q . t q2 1 2 Q (5) Рассмотрим графическую модель (рис.2) двухфакторной ПФ в трехмерном пространстве. Допустим, вся совокупность возможных сочетаний ресурсов, результатов работ и управлений, формализованных поверхностью Y f ( x1 , x2 ) перемещается во времени, куда идут мировые линии материальных объектов, образуя какую-то гиперповерхность. Тогда АВ , условно оптимальное управление, характеризуемое вектором перемещаясь, образует плоскость ABAB , которая характеризует процесс управления во времени (рис. 3). Для практических целей, допускаем относительную стабильность параметров производственной функции Y f ( x1 , x2 ) во времени [11]. На основании исследований Бессонова В.А. принимаем стабильность параметров ПФ в течение года обеспеченной [1]. Изменения претерпевают параметры ресурсов и объемов работ во времени, зависящие от управления. Задача состоит в том, чтобы показать, как, реализуется управление при постоянно изменяющихся условиях выполнения работ, развивающихся во времени. Практическая реализация модели визуализации управления в трехмерном пространстве и времени Рассмотрим два частных варианта модели управления. Первый – идеальный. Рассмотрим перемещение вектора управления АВ во времени в пределах заданных параметров. Преобразования при коллинеарных пространственных осях осуществляется при перемещении с определенной скоростью (производительность труда - q), а начала координат совпадают в начальный момент времени в обеих системах. В результате перемещения без пространственных поворотов в заданной системе объекта Y f ( x1 , x2 ) образуются гиперповерхность и плоскость ABAB . Тогда длина отрезка AB , характеризующая проекцию вектора оптимального управления во времени, будет равна длине вектора характеризующего оптимальное управление АВ в соответствии с принятым критерием оптимальности. Рис. 3. Пространственная эконометрическая модель в п.-в., иллюстрирующая временные сечения пространства Минковского для векторов управления АВ и CD (преобразования АВ в AB и CD в CD ) Второй вариант. Внесем незначительное изменение в идеальную модель. Известно, что в силу влияния различных внешних и внутренних причин в реальных условиях, в управляемой и управляющей системах допускаются отклонения в параметрах управления. Тогда, например, вектор CD , под влиянием этих причин получит отклонение и, перемещаясь в пространстве производственных отношений и во времени, преобразуется в вектор C D . Параметры вектора управления CD , построенного по указанному выше критерию оптимальности, получат искажение и его вид может быть представлен, например, как CD . Положение CD не перпендикулярно 2Y и, следовательно, CD CD и положение CD не соответствует принятому критерию оптимальности. В реальных условиях управление в пространстве начинается от точки А (от достигнутого результата) в направлении точки В (планируемого результата). Фактическое развитие процесса завершается с течением времени от A к B . В зависимости от процессов, связанных с управлением, развивающихся во времени, точка В вектора АВ описывает достаточно сложную траекторию (рис.4). В силу совокупности факторов, влияющих на выполнение работ, не учтенных проектом, изменяющихся условий, запаздывания в реакции управляющей системы на изменения в процессе производства, в том числе и перерегулирование [9], и других причин траекторию перемещения вектора управления во времени в общем виде можно представить, например, рядом последовательных кривых (Рис. 4). Например, вектор АВ под влиянием реальных условий, и реакции управляющей системы для компенсации отклонений от заданных параметров совершает колебания во времени относительно заданного направления. Несмотря на эти процессы управляемой системе, удалось выйти на уровень 2Y в точке A и AB = АВ . Рис.4. Пространственная модель, иллюстрирующая временные сечения пространства Минковского для векторов управления и AB (преобразования АВ в AB ) с учетом реакции векторов управления на влияние внешних и внутренних факторов в ЭС. Рассуждая аналогично, по отношению CD (рис 5), показано, что управляющая система не обеспечила решение задачи управления, связанной с выходом на 2Y по кратчайшему расстоянию в соответствии с принятым нами критерием оптимальности (См. также рис. 3), что характеризует качество управления. Следует отметить, что весьма сложная поверхность, образованная перемещением вектора АВ или CD во времени (рис.4,5), также является количественной характеристикой экономического процесса. Рис.5. Пространственная эконометрическая модель, иллюстрирующая временные сечения пространства Минковского для векторов управления CD (преобразования CD в CD с учетом реакции векторов управления на влияние внешних и внутренних факторов в ИЭС. В частности, как мы условились в (5), в нашей задаче под скоростью понимается производительность труда – q, характерная для ЭС. Тогда площадь поверхности, образованная при перемещении вектора во времени t характеризует затраты на реализацию проекта. Чем меньше площадь, тем эффективнее инновационно-инвестиционный процесс. Моделирование управления инновационно-инвестиционных процессов в пространстве 4D открывает возможности для более полного технико-экономического анализа при внедрении достижений науки и техники, не только объектов, но и процессов, протекающих в ЭС, отражает важнейшие сведения о свойствах реальных технико-экономических процессов. Заключение В качестве основы пространственного моделирования управления внедрением принимается ПФ, прежде всего, как инструмент оценки эффективности использования ресурсов в субъекте дорожной отрасли. Алгебраическое введение дифференциалов ресурсов в производственную функцию субъекта позволяет визуализировать инновационноинвестиционный процесс и прогнозировать варианты его реализации. Квази-преобразование Лоренца и обобщенное пространство Минковского позволяют моделировать управление внедрением в четырехмерном пространстве, объединяющим физическое трёхмерное пространство ресурсов и время. Наглядное представление управления в пространстве 4D играет важную роль не только как обладающее большой познавательной и доказательной силой, но и как инструмент, способствующий лучшему пониманию управляемых процессов, в оценке и поиске оптимального управления. Список литературы: 1. Бессонов В.А. Проблемы построения производственных функций в российской переходной экономике. Стр. 39, 73. [Электронный ресурс] / В.А.Бессонов / -Режим доступаhttp://www.economicus.ru/macroeconomica/readings/Prois_funk.pdf - Дата обращения 11.04.2014. 2. Боровик В.С. Модель управления внедрением новой технологии на основе производственной функции / В.С. Боровик, В.В. Боровик, Ю.Е. Прокопенко // Экономический анализ: теория и практика. - 2013. -№ 42 (345). – С.25-30. 3. Боровик В. С. Моделирование управления в социальноэкономических системах с учетом человеческого фактора на основе теории подобия / В. С. Боровик, Е.Ю.Зайцева // Известия ВолгГТУ: Актуальные проблемы управления, вычислительной техники и информатики в технических системах. Волгоградский государственный технический университет. – Волгоград, 2012. –Вып. 15 (102)– С. 8–12. 4 . Васев П.А., Перевалов Д.С., О создании методов многомерной визуализации // Труды 12-й Международной Конференции по Компьютерной графике и машинному зрению ГрафиКон'2002, Н. Новгород, С. 431-437. 5. Гранберг А.Г. Основы региональной экономики. М.: ГУ -ВШЭ, 2003. 495 с. 6. Казарян В. П. Понятие времени в структуре научного знания / В. П. Казарян. – М.: Изд-во МГУ, 1980. – 225 с. 7. Математическая энциклопедия. Т 1. Издательство Советская энциклопедия. М., 1984. Стр. 843. 8. Математическая энциклопедия. Т 4. Издательство Советская энциклопедия. М., 1984. Стр. 148, 719. 9. Михайлов В. С. Теория управления / В. С. Михайлов. — Киев: Выща школа. Головное издательство, 1988. — 312 с. 10. Полтерович В.М. Гипотеза об инновационной паузе и стратегии модернизации // Вопросы экономики. 2009. №6. С 12. 11. Терехов Л. Л. Производственные функции. Статистика / Л. Л. Терехов. – М., 1974. – 127 с. 12. Фащевский А. Б. Графическое изображение четырехмерного пространства [Электронный ресурс] / А. Б. Фащевский. – Режим доступа http://khd2.narod.ru/authors/fshvsky/spc4d.htm. – Дата обращения 30.12.14. 13. Харитонов В. В. Аналитическая модель эффективности инвестиционных проектов в энергетике] / В. В. Харитонов, Н. А. Молоканов // Экономический анализ: теория и практика. – 2013. – № 16 (319). – C. 19. 14. Шумпетер Й. История экономического анализа. В трех томах. Спб.: - Экономическая школа, -2004. 15. Эйнштейн А. «Сущность теории относительности» Электронный ресурс. Код доступа http://murzim.ru/jenciklopedii/100-velikih-knig/4190eynshteyn-suschnost-teorii-otnositelnosti.html. Дата обращения 20.08.2014. 16. Эйнштейн А. Основные идеи и проблемы теории относительности // Собрание научных трудов, т. II. — М., 1966. — стр. 120 17. Ярмолинский В. А. Повышение эффективности использования производственных ресурсов в условиях неопределенности финансирования дорожных объектов / В. А. Ярмолинский, А. М. Хакимов // Вести Тихоокеанского государственного университета. – 2011. – № 1. – C. 11–19. 18. Carmeli, Moshe. Group Theory and General Relativity, Representations of the Lorentz Group and Their Applications to the Gravitational Field / Moshe Carmeli. – McGraw-Hill, New York, 1977. – 311 p. 19. Cohn-Vossen, S. Anschauliche Geometri / S. Cohn-Vossen, D. Hilbert. – Berlin: Verlang von J. Springer, 1932. – 325 p. 20. Crevoisier O. The Innovative Milieus Approach: Toward a Territorialized Understanding of the Economy? // Economic Geography. 2004. Vol. 80. . 4. P. 367—379. 21. Drucker, P. F. Entrepreneurschip and innovation / P. F. Drucker. – New York: Harper a. Row, IX, 1995. – 277 p. 22. Maillat D., Crevoisier O., Vasserot J.-Y. Innovation et district industriel: l’Arc jurassiensuisse // Maillat D., Perrin J.-C. (eds.) Entreprises innovatrices et developpement territorial.Neuchatel: GREMI/EDES, 1992. P. 105—125. 23. Minkowski, Hermann. Geometrie der Zahlen / Hermann Minkowski. – Leipzig-Berlin: R. G. Teubner, 1910. – 320 p. 24. Yukihito, Sakai. Four-dimensional Mathematical Data Visualization via “Embodied Four-dimensional Space Display System” Faculty 2 Research of Information Sciences and Arts, Toyo University, 2100 Kujirai, Kawagoe, Saitama [Electronic resource] / Sakai Yukihito, Shuji Hashimoto. – Available at: http://www.scipress.org/journals/forma/pdf/2601/26010011.pdf. – Last access 30.04.2014. 25. Whitrow, G. J. The Natural Philosophy / G. J. Whitrow. – Published December 3rd by Oxford University Press, 1981. – 410 р.